Embed Size (px)
Citation preview

Contents lists available at SciVerse ScienceDirect
Journal of Sound and Vibration
Journal of Sound and Vibration 331 (2012) 2426–2442
0022-46
doi:10.1
n Corr
E-m
journal homepage: www.elsevier.com/locate/jsvi
Convergence of Galerkin truncation for dynamic response of finitebeams on nonlinear foundations under a moving load
Hu Ding a,n, Li-Qun Chen a,b, Shao-Pu Yang c
a Shanghai Institute of Applied Mathematics and Mechanics, Shanghai Key Laboratory of Mechanics in Energy Engineering, Shanghai University,
Shanghai 200072, Chinab Department of Mechanics, Shanghai University, Shanghai 200444, Chinac Shijiazhuang Tiedao University, Shijiazhuang 050043, China
a r t i c l e i n f o
Article history:
Received 8 August 2011
Received in revised form
25 December 2011
Accepted 31 December 2011
Handling Editor: L.G. Thamor vehicle–pavement system is modeled as a force moving along a finite length
Available online 2 February 2012
0X/$ - see front matter & 2012 Elsevier Ltd.
016/j.jsv.2011.12.036
esponding author. Tel.: þ86 21 56337273; f
ail address: [email protected] (H. Ding).
a b s t r a c t
The present paper investigates the convergence of the Galerkin method for the dynamic
response of an elastic beam resting on a nonlinear foundation with viscous damping
subjected to a moving concentrated load. It also studies the effect of different boundary
conditions and span length on the convergence and dynamic response. A train–track
Euler–Bernoulli beam on a nonlinear foundation. Nonlinear foundation is assumed to
be cubic. The Galerkin method is utilized in order to discretize the nonlinear partial
differential governing equation of the forced vibration. The dynamic response of the
beam is obtained via the fourth-order Runge–Kutta method. Three types of the
conventional boundary conditions are investigated. The railway tracks on stiff soil
foundation running the train and the asphalt pavement on soft soil foundation moving
the vehicle are treated as examples. The dependence of the convergence of the Galerkin
method on boundary conditions, span length and other system parameters are studied.
& 2012 Elsevier Ltd. All rights reserved.
1. Introduction
Elastic beams resting on different types of foundations are extensively investigated because they can model manymechanical structures such as bridges, roads or airport pavements, railway engineering equipments, transversallysupported pipelines and so on. Dynamic response of such a system subjected to a moving load is a well-known subjectin structural mechanics. Fryba has presented fundamental studies in this area including most of the published articlesbefore year 1999 [1]. Wang et al. have provided a review of the state-of-the-art on the analysis of beams and plates restingon elastic foundations before year 2005 [2]. Beskou and Theodorakopoulos have represented a review on the subject of thedynamic response of pavements to moving loads before year 2011 [3].
In most of the published works on the topic of vibrations of beams resting on foundation subjected to moving loads, thefoundation are assumed as linear elastic ones. Dahlberg experimentally found that the differences in the results between thelinear and nonlinear models of the support structure of a railway track were quite significant and cannot be omitted [4].Winkler foundation model, which is the simplest one but not poor, has been used for a century and still preserves a greatpractical and theoretical relevance [5]. With the development of the studies on dynamic response of linear foundation,
All rights reserved.
ax: þ86 21 36033287.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2427
researchers began to pay attention to elastic beams on nonlinear foundations. Based on the nonlinear cubic elastic Winklerfoundation, Birman considered the nonlinear free vibration of statically compressed hinged beams [6]; Naidu and Raoinvestigated free vibration and stability behavior of beams via a finite element formulation [7]; Pellicano and Mastroddi studiednonlinear dynamics of beams resting on a nonlinear spring bed [8]; Coskun and Engin presented the nonlinear vibration of abeam resting on a nonlinear tensionless foundation subjected to a concentrated load at the center using the perturbationtechnique [9]; Wu and Thompson found that linear track models are not appropriate for wheel/track impact by a finite elementmethod [10]; Santee and Gonalves estimated the nonlinear dynamic behavior and instabilities of a beam under harmonicforcing via analytical and semi-analytical perturbation [11]; Malekzadeh and Vosoughi investigated large amplitude freevibration analysis of laminated composite thin beams via the differential quadrature method [12].
It should be remarked that all the works cited above were about nonlinear elastic foundation, and did not account forany damping factor in foundation. Nevertheless, the effects of damping factors are an important research topic forvibration of elastic beams on foundation. Recently, researchers began to pay attention to vibration of elastic beams restingon nonlinear viscoelastic foundation. Kargarnovin et al. studied the response of infinite beams supported by nonlinearcubic viscoelastic foundations subjected to harmonic moving loads [13]. A comparison between the results of a nonlinearand equivalent linear viscoelastic model has shown that results are completely different at low frequencies. The authorsalso have drawn the conclusion that the magnification of all of harmonics of the bending moment in an Euler–Bernoullibeam is higher than that of a Timoshenko beam and consequently using an Euler–Bernoulli beam in the track design basedon dynamic strength and fatigue is acceptable because it results in an over-estimation. Based on the nonlinear cubicviscoelastic foundation, Ozkaya et al. handled a slightly curved Euler–Bernoulli beam carrying a concentrated mass withthe method of multiple scales [14]; Tsiatas presented the nonlinear problem of non-uniform beams [15]; Ansari et al.studied vibration of a finite Euler–Bernoulli beam traversed by a moving load, the solution was obtained using the Galerkinmethod in conjunction with the Multiple Scales Method [16,17]; Hryniewicz discussed the dynamic response of infiniteRayleigh beam subjected to moving load [18].
The dynamic response problem of elastic beams lying on nonlinear viscoelastic foundation displays nonlinear andviscous characters, and the solution becomes difficult. The Galerkin truncation method is a powerful tool for dealing withdynamical problems for such cases. Based on the Galerkin method, Birman checked the effects of nonlinear cubic elasticfoundation on free vibration of beams [6]; Ayoub presented an inelastic element for the analysis of beams on foundations[19]; Sheng et al. studied dynamical behavior of a beam with damage on viscoelastic foundation using 2-term truncation[20]; Pellicano and Mastroddi [8] investigated the nonlinear dynamic behavior via 3-term truncation in conjunction withthe method of Normal Forms; Ansari et al. studied train–track interaction via 3-term truncation, considered the internal–external resonance condition and obtained the frequency responses of different harmonics, and found that the nonlinearstiffness plays a positive role in the design of railway tracks because of the delay in the jump phenomenon [16,17];Yan et al. studied the dynamic response of functionally graded beams with an open edge crack resting on an elasticfoundation subjected to a transverse moving load via 3-term truncation [21]; Coskun studied the forced vibrations of anelastic beam resting on a nonlinear tensionless foundation by employing the 5-term truncation [9]; Celep et al.investigated response of a beam on a tensionless Pasternak foundation subjected to dynamic load by employing the5-term truncation [22]; Palmeri and Adhikari proposed a Galerkin-type state-space approach for studying transverse vibrationsof a double-beam system with first six assumed modes for each layer [23]; Vassilev and Djondjorov investigated the dynamicstability of viscoelastic pipes lying on a foundation of variable modulus using 10-term truncation [24]; Yang et al. presented thedynamical behavior of the vehicle–pavement–foundation coupled system using the 20-term truncation [25]; Chen and Chenstudied steady-state deformations of an infinite beam resting on a tensionless foundation under a moving point load through80-term truncation [26]; Senalp et al. studied dynamic response of a beam on linear and nonlinear viscoelastic foundationsunder a concentrated moving force, 100-term truncation is utilized in order to solve the governing equations of motion [27].
Although the Galerkin truncation has been widely applied for dynamical problems of finite beams resting on anonlinear viscoelastic foundation, the convergence of the truncation terms has not been studied. Yang et al. pointed outthat when mode number of pavement is larger than 20, dynamic responses of the vehicle–pavement–foundation coupledsystem change are small [25]. To the author’s best knowledge, in a previous work on t beam-foundations, the problem ofquantitative convergence test of the Galerkin truncation and parameters’ effect has not been addressed. In this paper, theconvergence of the Galerkin method for dynamic response of finite Euler–Bernoulli beams on a nonlinear cubic foundationwith viscous damping is studied. The parametric dependence study is carried out to investigate the effects of differentparameters on the convergence of the Galerkin truncation.
The dynamic response of finite beams resting on foundation has been studied through different boundary conditions.Based on the finite element method for the dynamic analysis of beams on an elastic foundation subjected to moving pointloads, Thambiratnam and Zhuge proved that beams of span length L410 m can accurately approximate the response ofthe ideal beam of infinite length [28]. With the elastically restrained boundary conditions, Lee et al. investigated the elasticinstability of a beam resting on an elastic foundation subjected to a partially tangential force [29]. In order to study theinteraction between train vehicles and railway track, Muscolino and Palmeri scrutinized the response of beams resting onviscoelastically damped foundation under moving sdof oscillators [30]. Based on modal shapes and natural frequencies ofthe beam-foundation, the effects of boundary conditions and span length of the beam are investigated through a state-space formulation. Monsalve et al. presented the dynamic analysis of a beam-column resting on an elastic foundation withgeneralized end conditions [31]. The end conditions allowed simulating any end support condition to the beam-column.

H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422428
In order to study dynamic responses of the vehicle–pavement–foundation coupled system, Yang et al. set length of beamas 160 m between simply supported ends for experiments and Galerkin investigations [25]. Sapountzakis and Kampitsisanalyzed nonlinear dynamic of beam-columns partially supported on tensionless foundation concentrated transversemoving load [32]. The dynamic responses of functionally graded beams resting on an elastic foundation subjected to amoving load with different end supports are obtained by Yan et al. [21]. The authors found that boundary conditions havesignificant influence on the dynamic response of the cracked functionally graded materials beams. Based on free–free ends,Chen and Chen studied the multiple steady-state deformations of a beam resting on a tensionless foundation under amoving point load [26]. Through numerical simulation, the authors found that the longer length of beams is chosen, moremodes are required to achieve convergence generally. Mottaghian et al. found the precise analytical solution of the freevibration of beams on elastic foundation with simply supported condition and fixed end condition [33]. However, there areno works on the influences of boundary conditions of the finite beams resting on a foundation on dynamic response ofbeams excited by a moving load and the convergence of the Galerkin method. To address the lacks of research in thisaspect, the dynamic responses are calculated by the Galerkin truncation under three types of the conventional boundaryconditions, namely simply-supported, clamped–clamped and free–free boundary conditions. In the present work, theeffects of boundary condition and span length of the supporting beam on the dynamic responses and the convergence ofthe Galerkin truncation are studied.
The present paper is organized as follows. Section 2 establishes the governing equation for the transverse vibration of afinite elastic Euler–Bernoulli beam on nonlinear foundation with viscous damping subjected to a moving concentratedforce. Section 3 develops the Galerkin truncation schemes and the integral quadrature schemes to determine the dynamicresponses of the beams. Section 4 presents two numerical examples for comprehensive convergence study and boundaryconditions, span length and other parametric sensitive analysis. Section 5 ends the paper with the concluding remarks.
2. Equation of motion
The system under investigation is a finite elastic Euler–Bernoulli beam resting on nonlinear viscoelastic foundation andsubjected to a moving load. Consider a homogeneous beam with a constant cross-section A, a moment of inertial I, a length L, adensity r and a modulus of elasticity E. The foundation is taken as a nonlinear Winkler’s foundation with linear-plus-cubicstiffness and viscous damping with three parameters as follows [16,17]:
P¼ k1Yþk3Y3þmY ,T (1)
where P represents the force induced by the foundation per unit length of the beam, k1 and k3 are the linear and nonlinearfoundation parameters, respectively, m is the damping coefficient of the foundation, T is the time, a comma preceding T denotesthe partial differentiation with respect to T. Using the Hamilton principle and considering the Euler–Bernoulli beam theory, onecan develop the governing differential equation of motion for the beam as
rAY ,TTþEIY ,XXXXþk1Yþk3Y3þmY ,T ¼ FzdðX�VTÞ (2)
where Y(X,T) is the vertical displacement function, EI is the flexural rigidity of the beam, X is the spatial coordinate along theaxis of the beam, d(X) is the Dirac delta function used to deal with the moving concentrated load, a comma preceding X denotesthe partial differentiation with respect to X, Fz and V are the magnitude of the load and load speed, respectively. In the recentworks by Ansari et al. [16,17], the same equation has been handled via comparison of 3-term truncation with Multiple ScalesMethod by considering the internal–external resonance condition. It should be remarked that in [16,17] only the dynamicbehavior of beams with simply supported ends is analyzed while, in the present work, beams with clamped–clamped and free–free ends also were considered.
Introducing the dimensionless variables and parameters as follows:
y¼Y
L, t¼
T
L
ffiffiffiffiE
r
s, v¼ V
ffiffiffiffirE
r, x¼
X
L, kf ¼
1
L
ffiffiffiI
A
r, Fz2
Fz
EA, m2m
A
ffiffiffiffiffiffiL2
rE
s,
k12k1L2
EA, k32
k3L4
EA(3)
where x is the dimensionless spatial coordinate and t is the dimensionless time. Eq. (2) can be transformed into thedimensionless equation
y,ttþk2f y,xxxxþk1yþk3y3þmy,t ¼ Fzdðx�vtÞ (4)
The beam considered in the model here is assumed to be simply supported at both ends, and therefore the boundaryconditions are given as follows [16,17,25]:
yð0,tÞ ¼ yð1,tÞ ¼ 0, y,xxð0,tÞ ¼ y,xxð1,tÞ ¼ 0 (5)

H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2429
In the present investigation, other two kinds of boundary conditions of the beam also are considered, that is to say, bothclamped ends, as follows [30,32]:
yð0,tÞ ¼ yð1,tÞ ¼ 0, y,xð0,tÞ ¼ y,xð1,tÞ ¼ 0 (6)
and both free ends as follows [21,22,26]:
y,xxð0,tÞ ¼ y,xxð1,tÞ ¼ 0, y,xxxð0,tÞ ¼ y,xxxð1,tÞ ¼ 0 (7)
In all numerical examples here, the initial conditions are
yðx,tÞ��t ¼ 0¼ 0, y,tðx,tÞ
��t ¼ 0¼ 0 (8)
3. Galerkin discretization
3.1. Galerkin procedure
The Galerkin truncation method is used to discretize the system and the series expansion form when y(x,t) is assumedas [34]
yðx,tÞ ¼X1k ¼ 1
qkðtÞfkðxÞ (9)
where fkðxÞ are the trial functions, qkðtÞ are sets of generalized displacements of beams.In this research, the first n terms of Eq. (9) is considered in order to determine y(x,t). Substituting Eq. (9) into Eq. (4)
leads to
Xn
k ¼ 1
f½ €qkðtÞþk1qkðtÞþm _qkðtÞ�fkðxÞgþk2f
Xn
k ¼ 1
½qkðtÞf0000
k ðxÞ�
þk3
Xn
k ¼ 1
½qkðtÞfkðxÞ�
( )3
�Fzdðx�vtÞ ¼ 0 (10)
Multiplying Eq. (10) by the weight functions wiðxÞ and integrating it over the interval of 0 and 1, the Galerkin procedureleads to the following set of n second-order ordinary differential equations:
Xn
k ¼ 1
½ €qkðtÞþk1qkðtÞþm _qkðtÞ�
Z 1
0fkðxÞwiðxÞdx
( )þk2
f
Xn
k ¼ 1
qkðtÞ
Z 1
0f0000
k ðxÞwiðxÞdx
" #
þk3
Z 1
0
Xn
k ¼ 1
½qkðtÞfkðxÞ�
( )3
wiðxÞdx�FzwiðvtÞ ¼ 0, i¼ 1,2,:::,n (11)
The integral quadrature method will be employed to deal with nonlinear term in Eq. (11) numerically. Introducing N
unequally spaced sampling points for simply supported boundary conditions as
xj ¼1
21�cos
ðj�1ÞpN�1
� �ðj¼ 1,2,. . .,NÞ (12)
For clamped–clamped (CC) at the ends and free–free (FF) at the ends, unequally spaced sampling points are introduced as
x1 ¼ 0, x2 ¼ 0:0001,
xj ¼1
21�cos
ðj�1ÞpN�3
� �ðj¼ 3,4,. . .,N�2Þ,
xN�1 ¼ 0:0001, xN ¼ 0 (13)
Discretization of the spatial variables in Eq. (11) via the integral quadrature method yields [35]
Xn
k ¼ 1
f½ €qkðtÞþk1qkðtÞþm _qkðtÞ�Akigþk2f
Xn
k ¼ 1
½qkðtÞBki�
þk3
XN
j ¼ 1
IjFjwiðxjÞ�FzwiðvtÞ ¼ 0, (14)
where
Fj ¼Xn
k ¼ 1
qkfkðxjÞ
" #3
(15)
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422430
Aki ¼
Z 1
0fkðxÞwiðxÞdx, i¼ 1,2,. . .,n; k¼ 1,2,. . .,n (16)
Bki ¼
Z 1
0f0000
k ðxÞwiðxÞdx, i¼ 1,2,. . .,n; k¼ 1,2,. . .,n (17)
and weighting coefficients Ij (j¼1,2,y,N) for integrals are solved from
1 1 � � � 1 1
x1 x2 � � � xN�1 xN
^ ^ ^ ^
xN�21 xN�2
2 � � � xN�2N�1 xN�2
N
xN�11 xN�1
1 � � � xN�1N�1 xN�1
N
0BBBBBB@
1CCCCCCA
I1
I2
^
IN�1
IN
0BBBBBB@
1CCCCCCA¼
1
1=2
^
1=ðN�1Þ
1=N
0BBBBBB@
1CCCCCCA
(18)
If the trial functions and the weight functions are both chosen properly. The vertical displacement of the beams yn(x,t)can be numerically solved via Eq. (9).
3.2. Trial functions and weight functions
In the present investigation, both the trial and weight functions are chosen as eigenfunctions of the beam-foundationlinear sub-system under the boundary conditions. The natural frequencies and mode functions of the beam resting onlinear elastic foundation with simply supported and without any loads can be derived as follows:
o2k ¼ k2
f b4kþk1 ðk¼ 1,2,. . .Þ (19)
and
jkðxÞ ¼ sinðbkxÞ ðk¼ 1,2,. . .Þ (20)
where
bk ¼ kp ðk¼ 1,2,. . .Þ (21)
When the beam is clamped–clamped (CC) at the ends, the kth mode functions is
jkðxÞ ¼ coshbkx�cosbkxþxkðsinbkx�sinhbkxÞ k¼ 1,2,. . . (22)
where
xk ¼coshbk�cosbk
sinhbk�sinbk
ðk¼ 1,2,. . .Þ (23)
and the characteristic equation is
cosbcoshb¼ 1 (24)
whose non-trivial solutions should be numerically computed: b1¼4.73, b2¼7.85,y. (notice that bkffi(2kþ1)p/2 fork42).
When the beam is free–free (FF) at the ends, the kth mode function is
jkðxÞ ¼ cosbkxþcoshbkxþxkðsinbkxþsinhbkxÞ, k¼ 1,2,. . . (25)
where
xk ¼�cosbk�coshbk
sinbk�sinhbk
¼�cosbkþcoshbk
sinbkþsinhbk
, k¼ 1,2,. . . (26)
and the characteristic equation is Eq. (24), same as clamped–clamped (CC) boundary conditions. And the eigenvalues areb1¼0, b2¼4.73, b3¼7.85, etc.
Both the trial and weight functions are chosen as eigenfunctions of the beam-foundation linear sub-system, that is to say,fkðxÞ ¼jkðxÞ, wiðxÞ ¼jiðxÞ. For simply-supported (SS), clamped–clamped (CC) and free–free (FF) boundary conditions, themode functions satisfied
f0000
k ðxÞ ¼ b4kfkðxÞ (27)
Substitution of Eq. (27) into Eq. (17) yields
Bki ¼ b4kAki ¼ b4
k
Z 1
0fkðxÞwiðxÞdx (28)

H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2431
With the usual ortho-normal condition, the simply-supported boundary conditions satisfiedZ 1
0fkðxÞwiðxÞdx¼
0, kai12 , k¼ i
((29)
The clamped–clamped (CC) and free–free (FF) boundary conditions satisfiedZ 1
0fkðxÞwiðxÞdx¼
0, kai
1, k¼ i
((30)
Substitution of Eq. (29) into Eq. (14) yields
€qiðtÞþm _qiðtÞþðk1þk2f bi
4ÞqiðtÞ�2F0wiðvtÞþ2k3
XN
j ¼ 1
½IjFjwiðxjÞ� ¼ 0 (31)
Substitution of Eq. (30) into Eq. (14) yields
€qiðtÞþm _qiðtÞþðk1þk2f bi
4ÞqiðtÞ�F0wiðvtÞþk3
XN
j ¼ 1
½IjFjwiðxjÞ� ¼ 0 (32)
For a set of given parameters kf, k1, k3, Fz, m and initial conditions in Eq. (7), qkðtÞcan be numerically solved via theRunge–Kutta method (fourth order) from Eqs. (31) or (32) by discretizing the temporal variables. After substituting thenumerical solutions into Eq. (9), the vertical displacement yn(x,t) can be solved.
It should be remarked that these involve hyperbolic functions for clamped–clamped and free–free boundary conditions.As pointed out in Refs. [23,36], these functions may introduce significant numerical inaccuracies in the higher modes ofvibration with double precision. In this paper, the calculating program is written in Cþþ, and the long double precisionis used.
Once the solution of the vertical displacement yn(x,t) is evaluated, the bending moment M(x,t) and shear force V(x,t)laws can be determined as
Mðx,tÞ ¼Xn
k ¼ 1
½�EIf00kðxÞ�qkðtÞ,
Vðx,tÞ ¼Xn
k ¼ 1
½�EIf000
k ðxÞ�qkðtÞ (33)
4. Case studies
The n in Eq. (10) denotes the term of Galerkin truncation. When n is bigger than a certain positive integer, the solutionof Eq. (32), i.e. the vertical displacement yn(x,t) will tend to a stable value. The convergence of Galerkin truncation focusedin the present paper refers to the property of approaching a limit value.
For two practical types of beams with foundation, the convergence of the Galerkin method is discussed in this section.The two types of beams with foundation represent the railway track on stiff soil foundation running the train and theasphalt pavement on soft soil foundation with the moving vehicle.
4.1. UIC60 rail
In this part, the beam is assumed to be the UIC60 European high-speed rail [38]. The physical and geometricalproperties of the track, foundation and the moving load and the dimensionless parameters’ value calculated from Eq. (3)are listed in Table 1.
The vertical displacements of the railway track are obtained via the Galerkin method. Once the boundary conditions ofthe beam are specified, Eq. (19) gives the natural frequencies ok. In the computations for the railway track on stiff soilfoundation running the train, the speed of the train is V¼10 m/s.
For justifying the use of the integral quadrature with unequally spaced sampling points, set n¼30, and the time step forRunge–Kutta time discretization is 10�5. For 30-term Galerkin truncation, in the integral quadrature method ofapplication, unequally spaced sampling points N¼13, and 15, 17 are used. The maximum relative difference betweenthe maximum vertical deflections of mid-point of N¼13 and 15 is 1.15�10�3; N¼15 and 17 is 7.93�10�4. For justifyingthe use of the fourth-order Runge–Kutta method, set n¼30, and unequally spaced sampling points N¼15. The maximumrelative difference between the maximum vertical deflections of mid-point of the time step for Runge–Kutta timediscretization 10�4 and 10�5 is 4.19�10�9. These comparisons demonstrate that the integral quadrature method andfourth-order Runge–Kutta method have rather high precision. In the following computations, unequally spaced samplingpoints N¼15, and the time step for Runge–Kutta time discretization is 10�5.

Table 1Properties of the UIC60 rail, track and load [16,17,38].
Item Notation Value Dimensionless value
Rail (UIC60)Young’s modulus (steel) E 201 GPa –
Mass density r 7850 kg/m3 –
Cross sectional area A 7.69�10–3 m2 –
Second moment of area I 3.055�10–5 m4 –
Modulus of elasticity kf – 3.501�10–3
Length L 18 m 1
FoundationMean stiffness k1 3.5�107 N/m2 7.0221
Nonlinear stiffness k3 4�1014 N/m4 2.600�1010
Viscous damping m 1732.5�103 N s/m2 99.879
Moving loadLoad Fz 65 kN 4.025�10–5
Speed V 10 m/s 0.001933
0 18-1
0
1
2
3
4
5*10-4
Y (
X,L
/2V
) (m
)
n = 4n = 10n = 20n = 30
7-4
-2
0
2
4
6
8
10M
(X
,L/2
V)
(N*m
)
*103
n = 10n = 30n = 100n = 150
4
-3
-2
-1
0
1
2
3*104
n = 10n = 30n = 100n = 150
V (
X,L
/2V
) (N
)
X (m)
X (m) X (m)2 4 6 8 10 12 14 16 8 9 10 11
6 8 10 12 14
Fig. 1. Effects of the Galerkin truncation terms (a) on the vertical deflection of the rail; (b) on the bending moment of the rail; and (c) on the shear force
of the rail.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422432
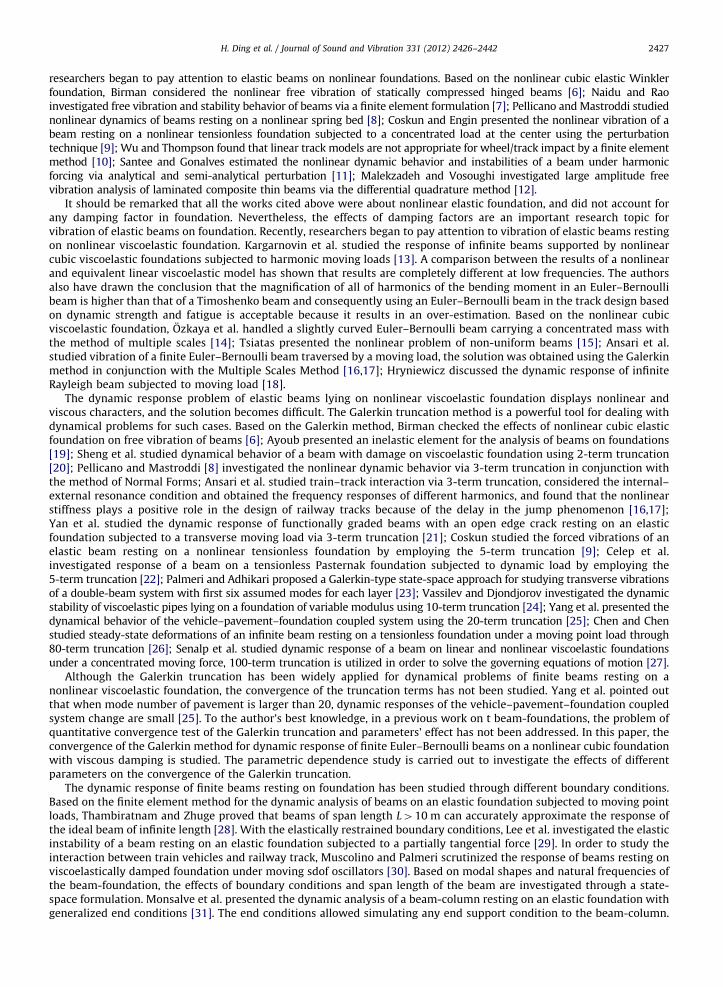
The results of a few different numbers of Galerkin basis functions, namely, 4-term Galerkin truncation, 10-termGalerkin truncation, 20-term Galerkin truncation and 30-term Galerkin truncation, for the vertical deflections, the bendingmoment and the shear force of the railway track while the load moves to mid-point of the track and the vertical deflectionsof mid-point of the track with time are shown in Figs. 1 and 2. There is large difference between the 4-term Galerkintruncation results with the 10-term ones, 20-term ones and the 30-term ones. The comparisons indicate that 4-termGalerkin method is not accurate enough for the dynamical response analysis of the railway track on stiff soil foundationrunning the train, and the 20-term Galerkin method yields rather accurate results. Actually, the maximum relativedifference between the maximum vertical deflections of mid-point of 4-term Galerkin truncation and 30-term Galerkintruncation is 30.40�10�2, and that of 10-term Galerkin truncation and 30-term Galerkin truncation is 5.11�10�2, and of20-term Galerkin truncation and 30-term Galerkin truncation is 0.71�10�2. Comparing the tendencies of Fig. 1(a) withFig. 1(b) and (c), it can be concluded that here bending moment and shear force’s convergence of the Galerkin truncation ismuch slower than that of vertical deflections. In the following computations, the results of vertical deflections are only shown.
0.0
-1
0
1
2
3
4
Y (
L/2
,t) (
m)
t (s)
n = 4
n = 10
n = 20
n = 30
*10-4
0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
Fig. 2. Effects of the Galerkin truncation terms on the vertical displacements of the rail’s midpoint.
50-5-1
0
1
2
3
4
5
Y (
X,L
/2V
) (m
)
Simply supported
Clamped-Clamped
Free-Free
*10-4
� (m)
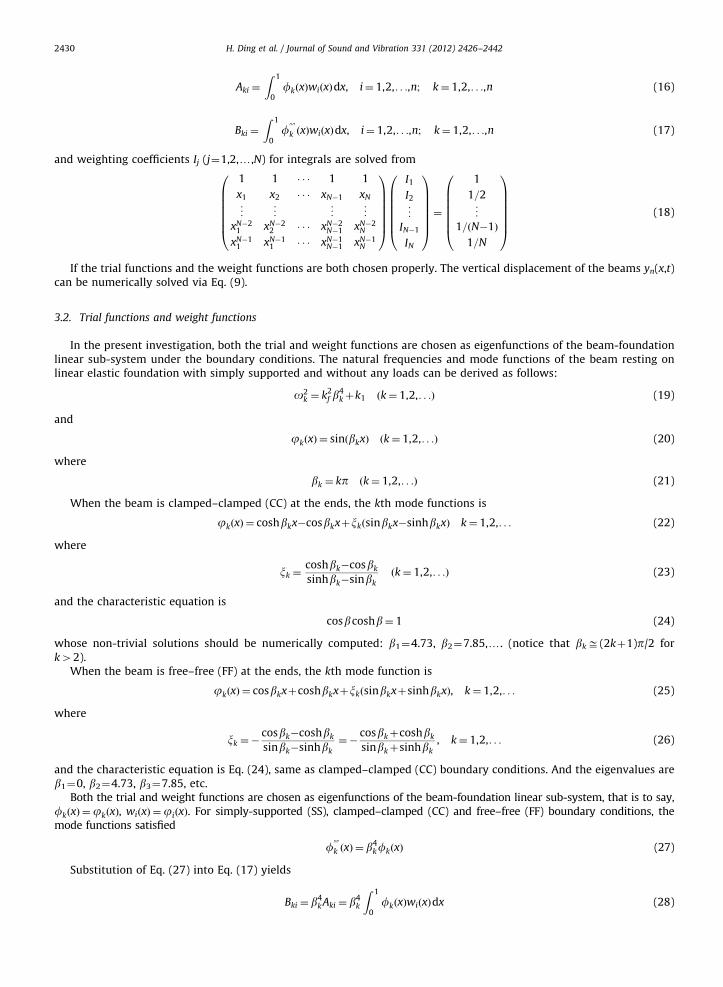
Fig. 3. Effects of the boundary conditions on the vertical deflection of the rail: n¼30.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2433
Figs. 1(a) and 2 also demonstrate that the convergence of the Galerkin truncation can be depicted by the vertical deflections ofthe span midpoint.
Biondi et al. proposed two different methods with different levels of accuracy to capture the discontinuities due tomoving masses in bending moment and shear force laws along linear Euler–Bernoulli beams [37]. Taking into account themoving masses’ inertia effects on the structure, the authors obtained the response with a reduced number. The approachto accelerate convergence of bending moment and shear force for beams on such nonlinear viscoelastic foundation will notbe considered in this analysis but is worth for further studies.
4.1.1. The effects of boundary conditions
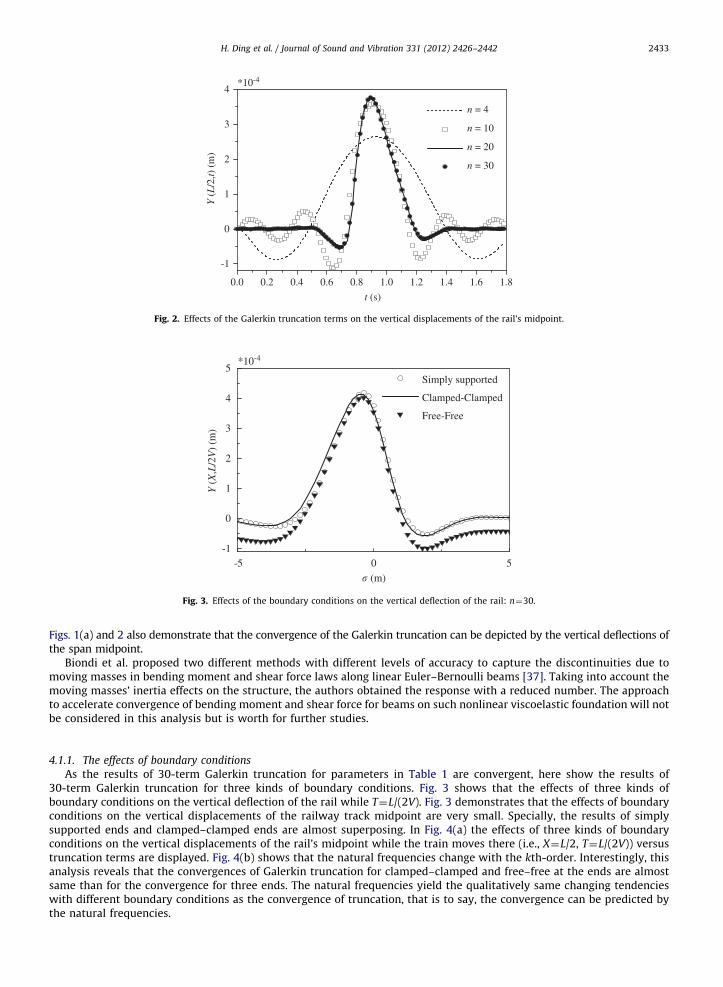
As the results of 30-term Galerkin truncation for parameters in Table 1 are convergent, here show the results of30-term Galerkin truncation for three kinds of boundary conditions. Fig. 3 shows that the effects of three kinds ofboundary conditions on the vertical deflection of the rail while T¼L/(2V). Fig. 3 demonstrates that the effects of boundaryconditions on the vertical displacements of the railway track midpoint are very small. Specially, the results of simplysupported ends and clamped–clamped ends are almost superposing. In Fig. 4(a) the effects of three kinds of boundaryconditions on the vertical displacements of the rail’s midpoint while the train moves there (i.e., X¼L/2, T¼L/(2V)) versustruncation terms are displayed. Fig. 4(b) shows that the natural frequencies change with the kth-order. Interestingly, thisanalysis reveals that the convergences of Galerkin truncation for clamped–clamped and free–free at the ends are almostsame than for the convergence for three ends. The natural frequencies yield the qualitatively same changing tendencieswith different boundary conditions as the convergence of truncation, that is to say, the convergence can be predicted bythe natural frequencies.
0
0
1
2
3
4
Truncation Terms n
Yn
(L/2
,L/2
V)
(m)
Simply supported Clamped-Clampled Free-Free
0
0
10
20
30
Terms k
Simply supported Clamped-Clampled Free-Free
�k
10 20 30
10 20 30
*10-4
Fig. 4. Effects of the boundary conditions of the pavement (a) on the vertical displacements of the rail’s midpoint versus truncation terms and (b) on the
natural frequencies versus terms.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422434
4.1.2. The effects of system parameters on convergence
Because, the effects of boundary conditions on the convergence of Galerkin truncation are very less, therefore, in thefollowing calculations for the railway track on stiff soil foundation running the train, only the results of simply supportedboundary conditions are shown.
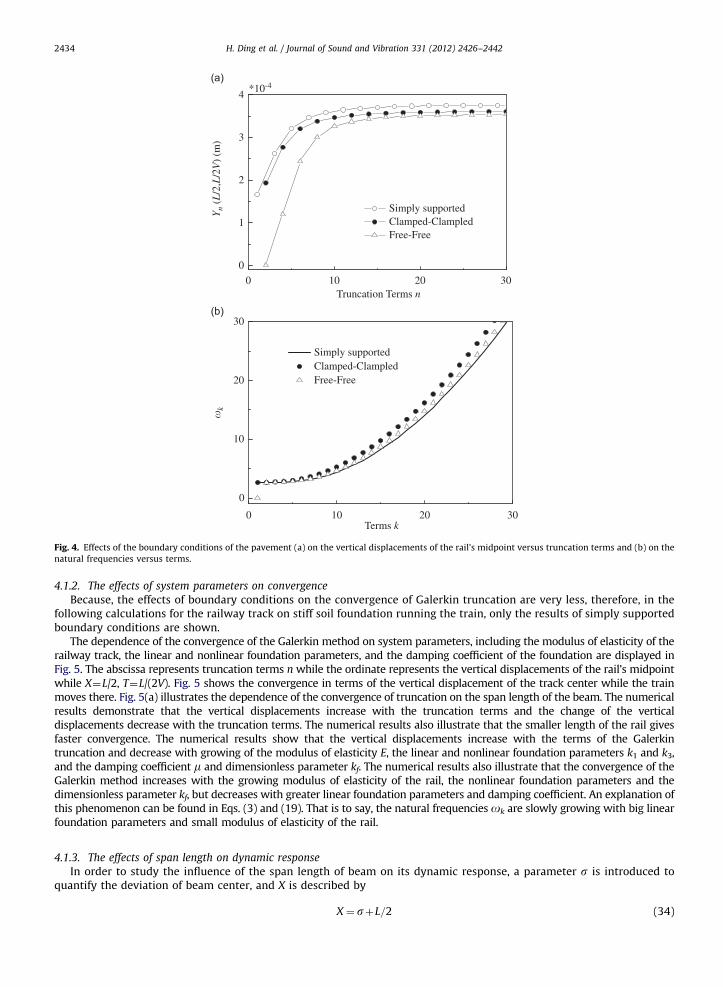
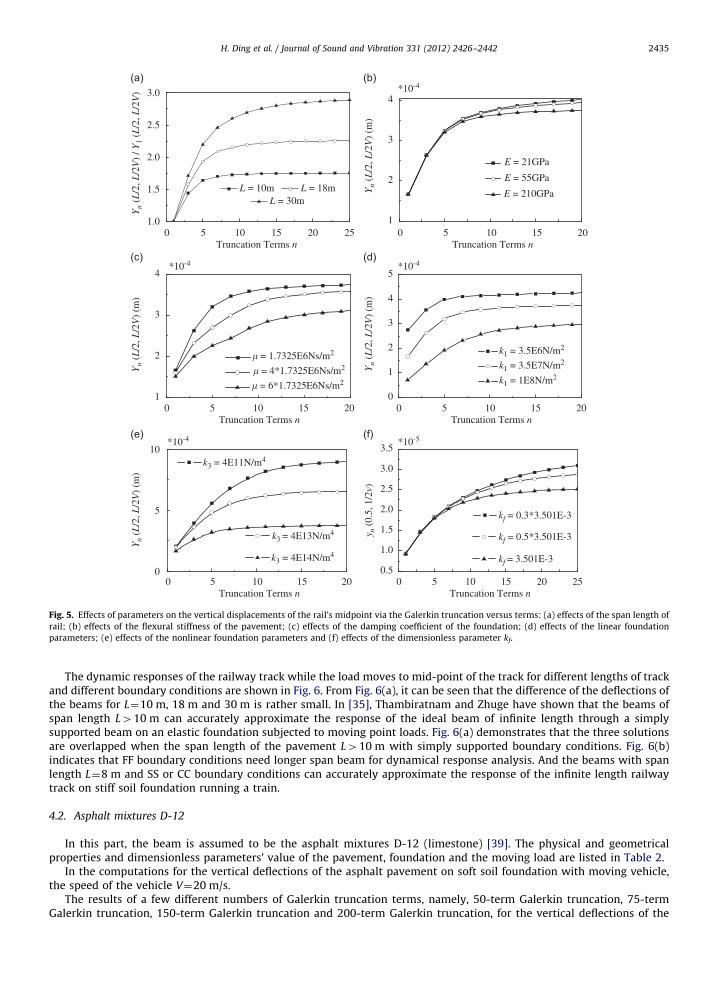
The dependence of the convergence of the Galerkin method on system parameters, including the modulus of elasticity of therailway track, the linear and nonlinear foundation parameters, and the damping coefficient of the foundation are displayed inFig. 5. The abscissa represents truncation terms n while the ordinate represents the vertical displacements of the rail’s midpointwhile X¼L/2, T¼L/(2V). Fig. 5 shows the convergence in terms of the vertical displacement of the track center while the trainmoves there. Fig. 5(a) illustrates the dependence of the convergence of truncation on the span length of the beam. The numericalresults demonstrate that the vertical displacements increase with the truncation terms and the change of the verticaldisplacements decrease with the truncation terms. The numerical results also illustrate that the smaller length of the rail givesfaster convergence. The numerical results show that the vertical displacements increase with the terms of the Galerkintruncation and decrease with growing of the modulus of elasticity E, the linear and nonlinear foundation parameters k1 and k3,and the damping coefficient m and dimensionless parameter kf. The numerical results also illustrate that the convergence of theGalerkin method increases with the growing modulus of elasticity of the rail, the nonlinear foundation parameters and thedimensionless parameter kf, but decreases with greater linear foundation parameters and damping coefficient. An explanation ofthis phenomenon can be found in Eqs. (3) and (19). That is to say, the natural frequencies ok are slowly growing with big linearfoundation parameters and small modulus of elasticity of the rail.
4.1.3. The effects of span length on dynamic response
In order to study the influence of the span length of beam on its dynamic response, a parameter s is introduced toquantify the deviation of beam center, and X is described by
X ¼ sþL=2 (34)
01.0
1.5
2.0
2.5
3.0
Yn
(L/2
, L/2
V)
/ Y1
(L/2
, L/2
V)
Truncation Terms n
L = 10m L = 18m L = 30m
1
2
3
4*10-4
Yn
(L/2
, L/2
V)
(m)
E = 21GPa
E = 55GPa
E = 210GPa
1
2
3
4*10-4
� = 1.7325E6Ns/m2
Yn
(L/2
, L/2
V)
(m)
� = 4*1.7325E6Ns/m2
� = 6*1.7325E6Ns/m2
0
1
2
3
4
5*10-4
Yn
(L/2
, L/2
V)
(m)
k1 = 3.5E6N/m2
k1 = 3.5E7N/m2
k1 = 1E8N/m2
0
5
10*10-4
k3 = 4E11N/m4
Yn
(L/2
, L/2
V)
(m)
k3 = 4E13N/m4
k3 = 4E14N/m4
0.5
1.0
1.5
2.0
2.5
3.0
3.5*10-5
kf = 0.3*3.501E-3
y n (
0.5,
1/2
v)
kf = 0.5*3.501E-3
kf = 3.501E-3
Truncation Terms n5 10 15 20 0 5 10 15 20
Truncation Terms n0 5 10 15 20
Truncation Terms n0 5 10 15 20
Truncation Terms n0 5 10 15 20 25
Truncation Terms n0 5 10 15 20
25
Fig. 5. Effects of parameters on the vertical displacements of the rail’s midpoint via the Galerkin truncation versus terms: (a) effects of the span length of
rail; (b) effects of the flexural stiffness of the pavement; (c) effects of the damping coefficient of the foundation; (d) effects of the linear foundation
parameters; (e) effects of the nonlinear foundation parameters and (f) effects of the dimensionless parameter kf.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2435
The dynamic responses of the railway track while the load moves to mid-point of the track for different lengths of trackand different boundary conditions are shown in Fig. 6. From Fig. 6(a), it can be seen that the difference of the deflections ofthe beams for L¼10 m, 18 m and 30 m is rather small. In [35], Thambiratnam and Zhuge have shown that the beams ofspan length L410 m can accurately approximate the response of the ideal beam of infinite length through a simplysupported beam on an elastic foundation subjected to moving point loads. Fig. 6(a) demonstrates that the three solutionsare overlapped when the span length of the pavement L410 m with simply supported boundary conditions. Fig. 6(b)indicates that FF boundary conditions need longer span beam for dynamical response analysis. And the beams with spanlength L¼8 m and SS or CC boundary conditions can accurately approximate the response of the infinite length railwaytrack on stiff soil foundation running a train.
4.2. Asphalt mixtures D-12
In this part, the beam is assumed to be the asphalt mixtures D-12 (limestone) [39]. The physical and geometricalproperties and dimensionless parameters’ value of the pavement, foundation and the moving load are listed in Table 2.
In the computations for the vertical deflections of the asphalt pavement on soft soil foundation with moving vehicle,the speed of the vehicle V¼20 m/s.
The results of a few different numbers of Galerkin truncation terms, namely, 50-term Galerkin truncation, 75-termGalerkin truncation, 150-term Galerkin truncation and 200-term Galerkin truncation, for the vertical deflections of the

50-5-1
0
1
2
3
4
5
Y (
X, L
/2V
) (m
)
L = 10mL = 18mL = 30m
01
2
3
4
5
6
Y (
X, L
/2V
) (m
)
Fixed
Simply Supported
Free
L (m)
� (m)
*10-4
*10-4
10 20 30
Fig. 6. Effects of the span length of rail on the vertical deflection of the rail with n¼100: (a) with simply supported boundary conditions and (b) with
three kinds of boundary conditions.
Table 2Properties of the asphalt mixtures D-12, pavement, foundation and load [25,39].
Item Notation Value Dimensionless value
Asphalt mixtures (D-12)Young’s modulus(steel) E 6.998 GPa –
Mass density r 2373 kg/m3 –
Height of pavement h 0.3 m –
Width of pavement b 1.0 m –
Modulus of elasticity kf – 5.41�10–4
Length L 160 m 1
FoundationMean stiffness k1 8�106 N/m2 97.552
Nonlinear stiffness k3 8�106 N/m4 2.497�106
Viscous damping m 0.3�106 N s/m2 39.263
Moving loadLoad Fz 212.6 kN 1.013�10–4
Speed V 20 m/s 0.01165
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422436
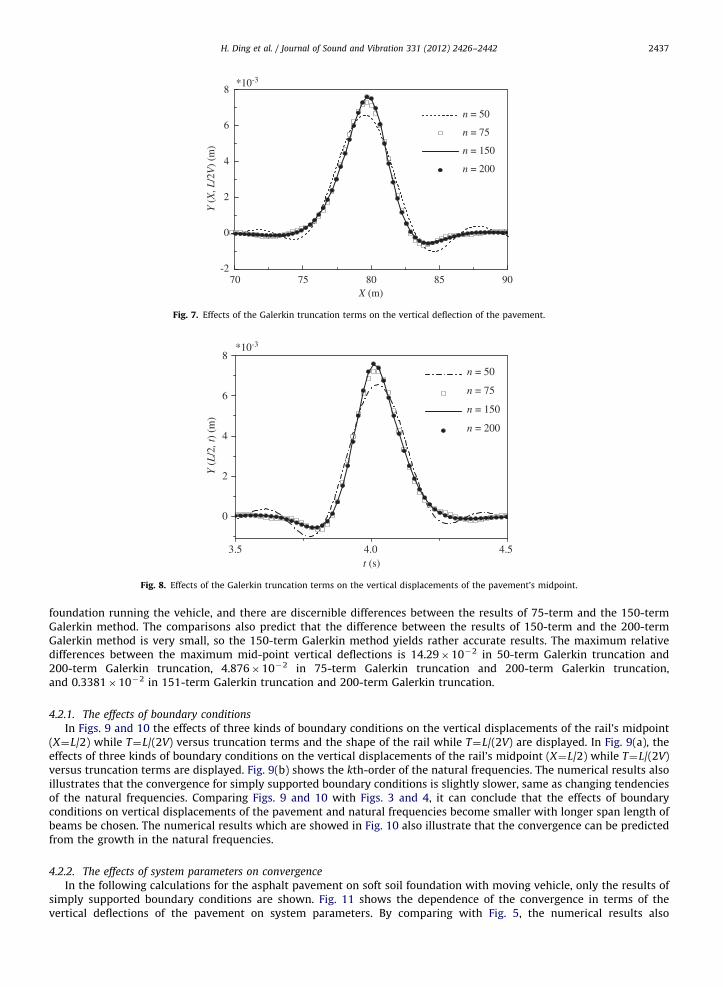
asphalt pavement while the load moves to mid-point of the pavement and the vertical deflections of pavement center withtime are, respectively, shown in Figs. 7 and 8. The numerical results demonstrated that there is a big difference betweenthe 50-term Galerkin truncation results with the 150-term ones and the 200-term ones. The comparisons indicate that50-term Galerkin method is not accurate enough for the dynamical response analysis of the asphalt pavement on soft soil
70-2
0
2
4
6
8
n = 50
n = 75
n = 150
n = 200
Y (
X, L
/2V
) (m
)
X (m)75 80 85 90
*10-3
Fig. 7. Effects of the Galerkin truncation terms on the vertical deflection of the pavement.
4.54.03.5
0
2
4
6
8*10-3
Y (
L/2
, t)
(m)
t (s)
n = 50
n = 75
n = 150
n = 200
Fig. 8. Effects of the Galerkin truncation terms on the vertical displacements of the pavement’s midpoint.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2437
foundation running the vehicle, and there are discernible differences between the results of 75-term and the 150-termGalerkin method. The comparisons also predict that the difference between the results of 150-term and the 200-termGalerkin method is very small, so the 150-term Galerkin method yields rather accurate results. The maximum relativedifferences between the maximum mid-point vertical deflections is 14.29�10�2 in 50-term Galerkin truncation and200-term Galerkin truncation, 4.876�10�2 in 75-term Galerkin truncation and 200-term Galerkin truncation,and 0.3381�10�2 in 151-term Galerkin truncation and 200-term Galerkin truncation.
4.2.1. The effects of boundary conditions
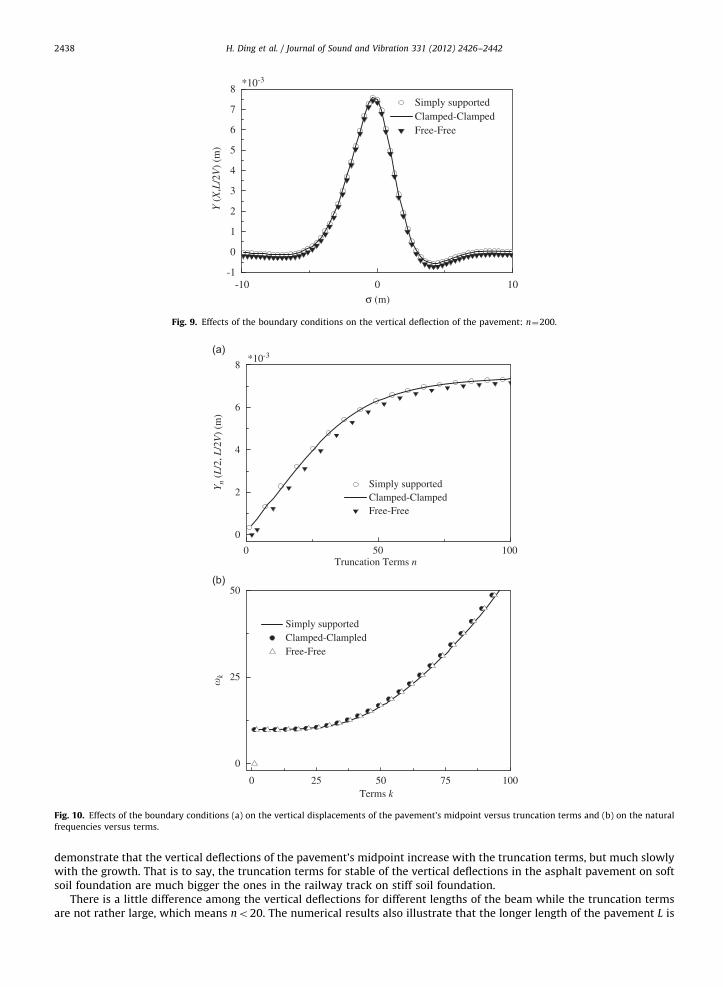
In Figs. 9 and 10 the effects of three kinds of boundary conditions on the vertical displacements of the rail’s midpoint(X¼L/2) while T¼L/(2V) versus truncation terms and the shape of the rail while T¼L/(2V) are displayed. In Fig. 9(a), theeffects of three kinds of boundary conditions on the vertical displacements of the rail’s midpoint (X¼L/2) while T¼L/(2V)versus truncation terms are displayed. Fig. 9(b) shows the kth-order of the natural frequencies. The numerical results alsoillustrates that the convergence for simply supported boundary conditions is slightly slower, same as changing tendenciesof the natural frequencies. Comparing Figs. 9 and 10 with Figs. 3 and 4, it can conclude that the effects of boundaryconditions on vertical displacements of the pavement and natural frequencies become smaller with longer span length ofbeams be chosen. The numerical results which are showed in Fig. 10 also illustrate that the convergence can be predictedfrom the growth in the natural frequencies.
4.2.2. The effects of system parameters on convergence
In the following calculations for the asphalt pavement on soft soil foundation with moving vehicle, only the results ofsimply supported boundary conditions are shown. Fig. 11 shows the dependence of the convergence in terms of thevertical deflections of the pavement on system parameters. By comparing with Fig. 5, the numerical results also
0-10 10-1
0
1
2
3
4
5
6
7
8 Simply supported Clamped-Clamped Free-Free
*10-3
Y (
X,L
/2V
) (m
)
σ (m)
Fig. 9. Effects of the boundary conditions on the vertical deflection of the pavement: n¼200.
500 100
0
2
4
6
8*10-3
Truncation Terms n
Yn
(L/2
, L/2
V)
(m)
Simply supported Clamped-Clamped Free-Free
0
0
25
50
Terms k
Simply supported Clamped-Clampled Free-Free
�k
25 50 75 100
Fig. 10. Effects of the boundary conditions (a) on the vertical displacements of the pavement’s midpoint versus truncation terms and (b) on the natural
frequencies versus terms.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422438
demonstrate that the vertical deflections of the pavement’s midpoint increase with the truncation terms, but much slowlywith the growth. That is to say, the truncation terms for stable of the vertical deflections in the asphalt pavement on softsoil foundation are much bigger the ones in the railway track on stiff soil foundation.
There is a little difference among the vertical deflections for different lengths of the beam while the truncation termsare not rather large, which means no20. The numerical results also illustrate that the longer length of the pavement L is
00
5
10
15
20
25
30
Yn
(L/2
,L/2
V)
/ Y1(
L/2
, L/2
V)
Truncation Terms n
L = 100m
L = 160m
L = 200m
00
2
4
6
8
10*10-3
Yn
(L/2
, L/2
V)
(m)
Truncation Terms n
E = 0.2*6.998GPa E = 6.998GPaE = 5.0*6.998GPa
0
4
8 *10-3
Yn
(L/2
, L/2
V)
(m)
� = 1.0*0.3E6Ns/m2
� = 2.0*0.3E6Ns/m2
� = 3.0*0.3E6Ns/m2
0
2
4
6
8
10
12 *10-3
Yn
(L/2
, L/2
V)
(m)
h = 0.1m h = 0.2mh = 0.3m
1005000
2
4
6
8
10 *10-3
Yn
(L/2
, L/2
V)
(m)
b = 0.3mb = 1.0mb = 10m
00
1
2
3
4
5k1 = 16E6N/m2
Yn
(L/2
, L/2
V)
(m)
Truncation Terms n
k1 = 24E6N/m2
k1 = 40E6N/m2
1206000
4
8*10-3
Yn
(L/2
, L/2
V)
(m)
k3 = 8E6N/m4
k3 = 8E9N/m4
k3 = 4E10N/m4
Truncation Terms n
Truncation Terms n
*10-3
10 20 30 40 50 60 70 80 90 40 80 120
0Truncation Terms n40 80 1200
Truncation Terms n40 80 120
40 80 120 160
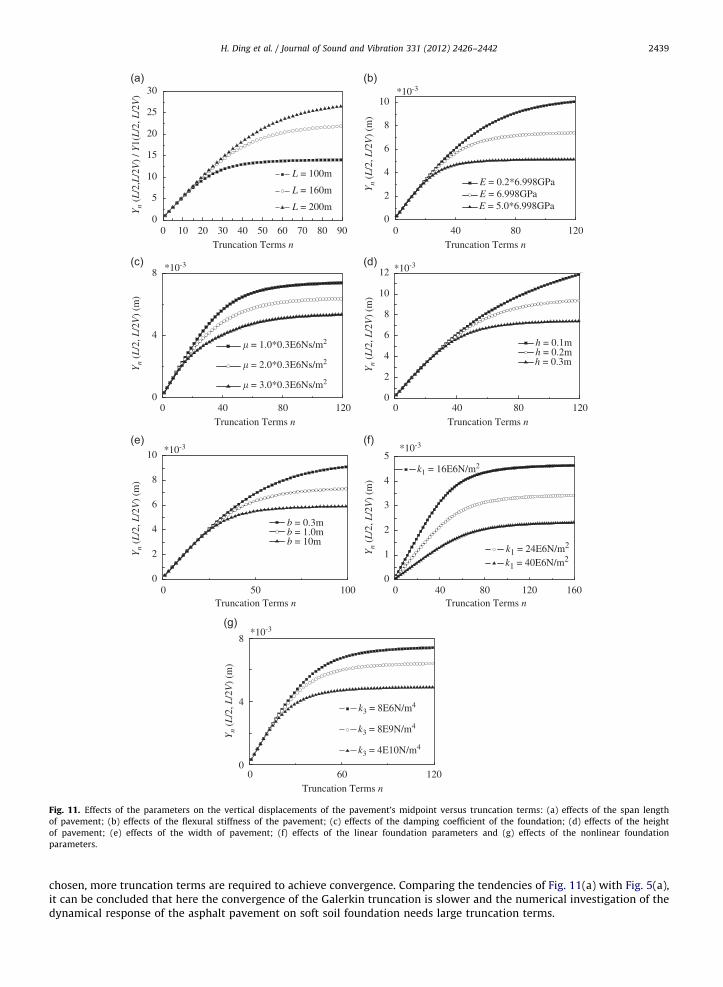
Fig. 11. Effects of the parameters on the vertical displacements of the pavement’s midpoint versus truncation terms: (a) effects of the span length
of pavement; (b) effects of the flexural stiffness of the pavement; (c) effects of the damping coefficient of the foundation; (d) effects of the height
of pavement; (e) effects of the width of pavement; (f) effects of the linear foundation parameters and (g) effects of the nonlinear foundation
parameters.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2439
chosen, more truncation terms are required to achieve convergence. Comparing the tendencies of Fig. 11(a) with Fig. 5(a),it can be concluded that here the convergence of the Galerkin truncation is slower and the numerical investigation of thedynamical response of the asphalt pavement on soft soil foundation needs large truncation terms.
-10-2
0
2
4
6
8
Y (
X, L
/2V
) (m
)
L = 18m
L = 100m
L = 160m
00
2
4
6
8
10
Y (
X, L
/2V
) (m
)
Fixed
Simply Supported
Free
L (m)
� (m)
*10-3
*10-3
20 40 60 80 100
-5 0 5 10
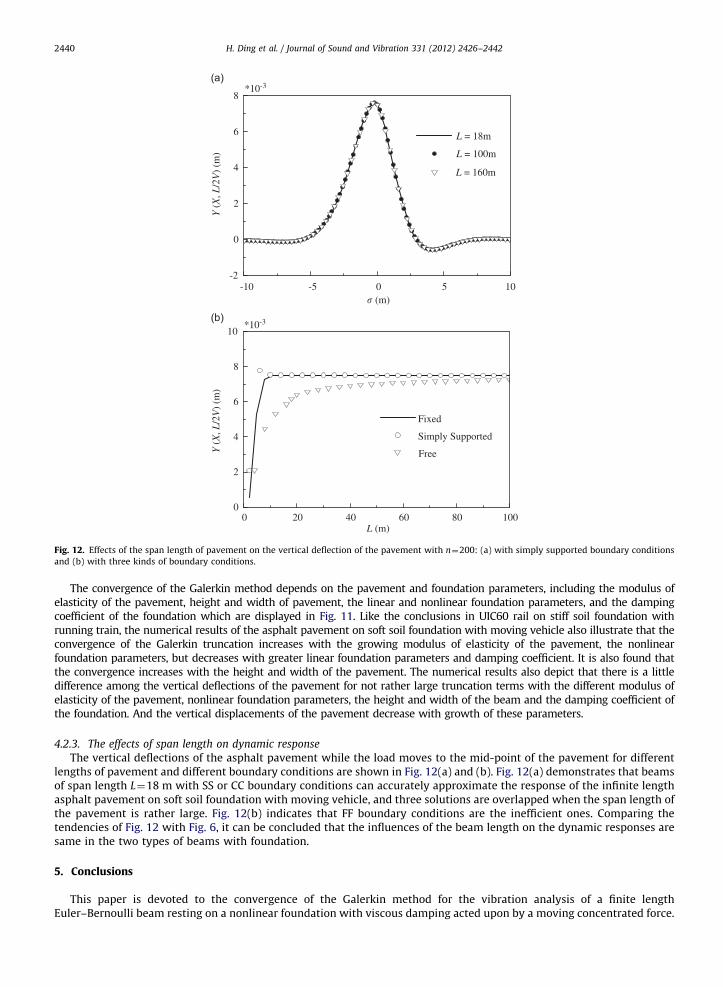
Fig. 12. Effects of the span length of pavement on the vertical deflection of the pavement with n¼200: (a) with simply supported boundary conditions
and (b) with three kinds of boundary conditions.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422440
The convergence of the Galerkin method depends on the pavement and foundation parameters, including the modulus ofelasticity of the pavement, height and width of pavement, the linear and nonlinear foundation parameters, and the dampingcoefficient of the foundation which are displayed in Fig. 11. Like the conclusions in UIC60 rail on stiff soil foundation withrunning train, the numerical results of the asphalt pavement on soft soil foundation with moving vehicle also illustrate that theconvergence of the Galerkin truncation increases with the growing modulus of elasticity of the pavement, the nonlinearfoundation parameters, but decreases with greater linear foundation parameters and damping coefficient. It is also found thatthe convergence increases with the height and width of the pavement. The numerical results also depict that there is a littledifference among the vertical deflections of the pavement for not rather large truncation terms with the different modulus ofelasticity of the pavement, nonlinear foundation parameters, the height and width of the beam and the damping coefficient ofthe foundation. And the vertical displacements of the pavement decrease with growth of these parameters.
4.2.3. The effects of span length on dynamic response
The vertical deflections of the asphalt pavement while the load moves to the mid-point of the pavement for differentlengths of pavement and different boundary conditions are shown in Fig. 12(a) and (b). Fig. 12(a) demonstrates that beamsof span length L¼18 m with SS or CC boundary conditions can accurately approximate the response of the infinite lengthasphalt pavement on soft soil foundation with moving vehicle, and three solutions are overlapped when the span length ofthe pavement is rather large. Fig. 12(b) indicates that FF boundary conditions are the inefficient ones. Comparing thetendencies of Fig. 12 with Fig. 6, it can be concluded that the influences of the beam length on the dynamic responses aresame in the two types of beams with foundation.
5. Conclusions
This paper is devoted to the convergence of the Galerkin method for the vibration analysis of a finite lengthEuler–Bernoulli beam resting on a nonlinear foundation with viscous damping acted upon by a moving concentrated force.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–2442 2441
The Galerkin method was used to discretize the governing equation and subsequently, its solution for force vibration of thebeam was determined via the fourth-order Runge–Kutta method. Two systems, the railway track on stiff soil foundationrunning the train and the asphalt pavement on soft soil foundation moving the vehicle, are treated as examples.
Three types of the conventional boundary conditions, namely simply-supported, clamped–clamped and free–freeboundary conditions are investigated. In both case studies, the numerical results demonstrated that the free–freeboundary conditions need longer span length for dynamic response analysis. And the vertical deflections for threeboundary conditions are overlapped with a rather large length of the rail or pavement.
The dependences of the convergence of the Galerkin method on boundary conditions and system parameters wereinvestigated. It was found that the effects of boundary conditions on dynamic responses become smaller when longer spanlength of beams is chosen; the convergence increases with the growing modulus of elasticity of the beams, the nonlinearfoundation parameters, the span length and width of the pavement but decreases with greater linear foundationparameters and damping coefficient.
The tendencies of the vertical deflections of the beam’s midpoint and the natural frequencies with the truncation termswere compared. It was found that the convergence of the Galerkin truncation can be predicted by the natural frequencies,the property of slower growth in the natural frequency of beam causes lack of convergence, and investigation intodynamical responses of the vehicle–pavement–foundation system needs large truncation terms.
Acknowledgments
This work was supported by the National Outstanding Young Scientists Fund of China (Project no. 10725209),the National Science Foundation of China (Project nos. 10902064, 10932006), Shanghai Rising-Star Program(no. 11QA1402300), Innovation Program of Shanghai Municipal Education Commission (no. 12YZ028), and ShanghaiLeading Academic Discipline Project (no. S30106).
The authors are grateful to the reviewers for their positive and helpful comments and suggestions, which have greatlyhelped to improve the manuscript.
References
[1] L. Fryba, Vibration of Solids and Structures under Moving Loads, Thomas Telford, London, 1999.[2] Y.H. Wang, L.G. Tham, Y.K. Cheung, Beams and plates on elastic foundations: a review, Progress in Structural Engineering and Materials 7 (2005)
174–182.[3] N.D. Beskou, D.D. Theodorakopoulos, Dynamic effects of moving loads on road pavements: a review, Soil Dynamics and Earthquake Engineering 31
(2011) 547–567.[4] T. Dahlberg, Dynamic interaction between train and nonlinear railway track model, Proceedings of the Fifth European Conference on Structural
Dynamics (EURODYN 2002), Vol. 2, Munich, Germany, September 2–5, 2002, pp. 1155–1160.[5] E. Winkler, Die Lehre von der Elustizitat und Festigkeit, Dominicus, Prague, 1867.[6] V. Birman, On the effects of nonlinear elastic foundation on free vibration of beams, Journal of Applied Mechanics Transactions ASME 53 (1986)
471–473.[7] N.R. Naidu, G.V. Rao, Free vibration and stability behaviour of uniform beams and columns on nonlinear elastic foundation, Computers & Structures
58 (1996) 1213–1215.[8] F. Pellicano, F. Mastroddi, Nonlinear dynamics of a beam on elastic foundation, Nonlinear Dynamics 14 (1997) 335–355.[9] I. Coskun, H. Engin, Non-linear vibrations of a beam on an elastic foundation, Journal of Sound and Vibration 223 (1999) 224–243.
[10] T.X. Wu, D.J. Thompson, The effects of track non-linearity on wheel/rail impact, Proceedings of the Institute of Mechanical Engineers Part F: Journal ofRail and Rapid Transit 218 (2004) 1–12.
[11] D.M. Santee, P.B. Gonalves, Oscillations of a beam on a non-linear elastic foundation under periodic loads, Shock and Vibration 13 (2006) 273–284.[12] P. Malekzadeh, A.R. Vosoughi, DQM large amplitude vibration of composite beams on nonlinear elastic foundations with restrained edges,
Communications in Nonlinear Science and Numerical Simulation 14 (2009) 906–915.[13] M.H. Kargarnovin, D. Younesian, D.J. Thompson, C.J.C. Jones, Response of beams on nonlinear viscoelastic foundations to harmonic moving loads,
Computers and Structures 83 (2005) 1865–1877.[14] E. Ozkaya,ul, M. Sarig, H. Boyaci, Nonlinear transverse vibrations of a slightly curved beam carrying a concentrated mass, Acta Mechanica Sinica 25
(2009) 871–882.[15] G.C. Tsiatas, Nonlinear analysis of non-uniform beams on nonlinear elastic foundation, Acta Mechanica 209 (2010) 141–152.[16] M. Ansari, E. Esmailzadeh, D. Younesian, Internal–external resonance of beams on non-linear viscoelastic foundation traversed by moving load,
Nonlinear Dynamics 61 (2010) 163–182.[17] M. Ansari, E. Esmailzadeh, D. Younesian, Frequency analysis of finite beams on nonlinear Kelvin–Voight foundation under moving loads, Journal of
Sound and Vibration 330 (2011) 1455–1471.[18] Z. Hryniewicz, Dynamics of Rayleigh beam on nonlinear foundation due to moving load using Adomian decomposition and coiflet expansion, Soil
Dynamics and Earthquake Engineering 31 (2011) 1123–1131.[19] A. Ayoub, Mixed formulation of nonlinear beam on foundation elements, Computers and Structures 81 (2003) 411–421.[20] D.F. Sheng, Y. Zhang, C.J. Cheng, Dynamical behavior of nonlinear viscoelastic Timoshenko beams with damage on a viscoelastic foundation, Journal
of Shanghai University (English Edition) 8 (2004) 245–251.[21] T. Yan, S. Kitipornchai, J. Yang, X.Q. He, Dynamic behaviour of edge-cracked shear deformable functionally graded beams on an elastic foundation
under a moving load, Composite Structures 93 (2011) 2992–3001.[22] Z. Celep, K. Guler, F. Demir, Response of a completely free beam on a tensionless Pasternak foundation subjected to dynamic load, Structural
Engineering and Mechanics 37 (2011) 61–77.[23] A. Palmeri, S. Adhikari, A Galerkin-type state-space approach for transverse vibrations of slender double-beam systems with viscoelastic inner layer,
Journal of Sound and Vibration 330 (2011) 6372–6386.[24] V.M. Vassilev, P.A. Djondjorov, Dynamic stability of viscoelastic pipes on elastic foundations of variable modulus, Journal of Sound and Vibration 297
(2006) 414–419.
H. Ding et al. / Journal of Sound and Vibration 331 (2012) 2426–24422442
[25] S.P. Yang, S.H. Li, Y.J. Lu, Investigation on dynamical interaction between a heavy vehicle and road pavement, Vehicle System Dynamics 48 (2010)923–944.
[26] J.S. Chen, Y.K. Chen, Steady state and stability of a beam on a damped tensionless foundation under a moving load, International Journal of Non-LinearMechanics 46 (2011) 180–185.
[27] A.D. Senalp, A. Arikoglu, I. Ozkol, V.Z. Dogan, Dynamic response of a finite length Euler–Bernoulli beam on linear and nonlinear viscoelasticfoundations to a concentrated moving force, Journal of Mechanical Science and Technology 24 (2010) 1957–1961.
[28] D. Thambiratnam, Y. Zhuge, Dynamic analysis of beams on an elastic foundation subjected to moving loads, Journal of Sound and Vibration 198(1996) 149–169.
[29] S.Y. Lee, J.C. Lin, K.C. Hsu, Elastic instability of a beam resting on an elastic foundation subjected to a partially tangential force, Computers &Structures 59 (1996) 983–988.
[30] G. Muscolino, A. Palmeri, Response of beams resting on viscoelastically damped foundation to moving oscillators, International Journal of Solids andStructures 44 (2007) 1317–1336.
[31] L.G. Arboleda-Monsalve, D.G. Zapata-Medina, J.D. Aristizabal-Ochoa, Timoshenko beam-column with generalized end conditions on elasticfoundation: dynamic-stiffness matrix and load vector, Journal of Sound and Vibration 310 (2008) 1057–1079.
[32] E.J. Sapountzakis, A.E. Kampitsis, Nonlinear response of shear deformable beams on tensionless nonlinear viscoelastic foundation under movingloads, Journal of Sound and Vibration 330 (2011) 5410–5426.
[33] S.E. Mottaghian, M. Mofid, P. Alanjari, Exact solution to free vibration of beams partially supported by an elastic foundation, Scientia Iranica,Transactions A: Civil Engineering 18 (2011) 861–866.
[34] C.A.J. Fletcher, Computational Galerkin Methods, Springer-Verlag, New York, 1984.[35] C. Shu, Differential Quadrature and Its Application in Engineering, Springer-Verlag, London, 2000.[36] Y. Tang, Numerical evaluation of uniform beam modes, ASCE Journal of Engineering Mechanics 129 (2003) 1475–1477.[37] B. Biondi, G. Muscolino, A. Sidoti, Methods for calculating bing moment and shear force in the moving mass problem, ASME Journal of Vibration and
Acoustic 126 (2004) 542–552.[38] D. Younesian, M.H. Kargarnovin, Response of the beams on random Pasternak foundations subjected to harmonic moving loads, Journal of
Mechanical Science and Technology 23 (2009) 3013–3023.[39] J.N. Contreras, D. Castro-Fresno, A. Vega-Zamanillo, M. Celaya, I. Lombillo-Vozmediano, Dynamic modulus of asphalt mixture by ultrasonic direct
test, NDT & E International 43 (2010) 629–634.





























