Embed Size (px)
Citation preview

Using Fast Marching Eikonal Solver to Compute 3-D PdsTraveltime for Deep Receiver-Function ImagingZhe Guan1,2 and Fenglin Niu1
1Department of Earth, Environmental and Planetary Sciences, Rice University, Houston, TX, USA, 2Applied Physics Program,Rice University, Houston, TX, USA
Abstract In common-conversion-point stacking of receiver functions, most current studies compute 3-Drelative Pds traveltime corrections by integrating traveltime anomalies along 1-D raypaths. This ray tracingapproach is generally time-consuming and less accurate when prominent velocity anomalies exist andeffects of 3-D raypaths become significant. In this study we introduce a new scheme that utilizes afast-marching method eikonal solver to improve both the efficiency and accuracy of 3-D Pds traveltimecomputation. We first employ a 1-D raytracing method and the iasp91 model to calibrate the accuracy of thenew scheme and optimize the parameters of the numerical solver. We then apply the new scheme tocompute a massive number of Pds traveltimes using two sets of 3-D synthetic models, one set with ahigh-velocity slab and another set with a low-velocity plume, and compare these 3-D traveltimes with thosecomputed with the raypath integrating approach. We find 2.7% and 11.8% raypaths in the two slabmodels and 7.8% and 12.0% raypaths in the two plumemodels show a 3-D traveltime difference of ≥0.5 s. Weapply the proposed scheme to a subset of transportable array receiver functions that sample the transitionzone beneath the Yellowstone hotspot and find that a common-conversion-point stack using 3-D Pdstraveltimes computed by the eikonal solver method has the best focused P660s. Finally, we illustrate thatcomputational times can be reduced by 1 to 2 orders of magnitude with the new scheme to compute 3-D Pdstraveltimes of 20,000–200,000 receiver functions.
1. Introduction
Seismic imaging is a technique that utilizes secondary arrivals, such as reflected/converted and scatteredwaves, to locate their originating structures, that is, boundaries and scatterers (Niu, 2014; Shearer &Masters, 1992; Vidale & Benz, 1992). A major component of the technique is to convert the arrival times backto their source depth, known as the time-to-depth conversion (Dueker & Sheehan, 1997; Gilbert et al., 2003).As such, in order to produce quality seismic images, one requires a relatively accurate 3-D reference model aswell as efficient methods to compute traveltimes within the 3-D model, that is, 3-D traveltimes.
The receiver function technique (Ammon, 1991) is perhaps the single most used method in passive seismol-ogy to study crustal and Moho structure.Common-conversion-point (CCP) stacking of receiver functionsprovides an efficient means to image the lithosphere-asthenosphere boundary, mantle transition zonediscontinuities (the 410 and 660 km), and other structures (Dueker & Sheehan, 1997; Eagar et al., 2010;Gilbert et al., 2003; Guan & Niu, 2017; Niu et al., 2004, 2005; Schmandt et al., 2011, 2012, 2014; Tauzinet al., 2013). As receiver function techniques utilize the relative arrival time between the P-to-S waves con-verted at the boundaries (hereafter referred to as Pds) and the direct arrival (P0) to compute the depths ofthe boundaries, both 3-D P and S wave velocity models are required to obtain an accurate time-to-depthconversion. Since it is more difficult to obtain high-resolution 3-D S wave models, and teleseismic tomogra-phy is intrinsically weak in resolving absolute 3-D velocities, many receiver function studies using the CCPstacking technique employed a 1-D reference model to compute the Pds traveltimes (e.g., Dueker &Sheehan, 1997; Gilbert et al., 2003), although it is well known that the reference model alone can introducesignificant bias in the imaged depth of a deep boundary. Niu and Kawakatsu (1998) computed the ΔtP660susing the iasp91 model (Kennett & Engdahl, 1991) and the 1-D model of the tectonically active NorthAmerica (P wave model of Walck, 1984, and S wave model of Grand and Helmberger, 1984) and found atraveltime difference of nearly 2 s, which converts to 20 km in depth. In other words, the depth of the660 km beneath tectonically active North America can be overestimated by ~20 km if the iasp91 modelis used as the reference model.
GUAN AND NIU 9049
Journal of Geophysical Research: Solid Earth
RESEARCH ARTICLE10.1029/2018JB015892
Key Points:• The proposed eikonal solver scheme
can accommodate actual 3-Draypaths and thus can obtain moreaccurate 3-D Pds traveltimes
• Application to Yellowstone receiverfunction data shows that the eikonalsolver method outperforms theregular raypath integration approach
• The eikonal solver scheme candramatically improve the efficiencyof computing 3-D Pds traveltimes
Correspondence to:F. Niu,[email protected]
Citation:Guan, Z., & Niu, F. (2018). Using fastmarching eikonal solver to compute 3-DPds traveltime for deep receiverfunction imaging. Journal of GeophysicalResearch: Solid Earth, 123, 9049–9062.https://doi.org/10.1029/2018JB015892
Received 2 APR 2018Accepted 8 OCT 2018Accepted article online 12 OCT 2018Published online 30 OCT 2018
©2018. American Geophysical Union.All Rights Reserved.

To compute the 3-D Pds traveltime, one assumes that in the 3-D velocity model, the raypaths of the Pds andP0 remain the same as in the 1-D reference model, and then accumulates the traveltime perturbationsinduced by the 3-D model along the 1-D raypaths from surface to the depth to be imaged (Liu et al., 2015;Schmandt et al., 2012), and finally adds the 3-D correction to the 1-D traveltime (hereafter referred to asray tracing or raypath integration scheme). While it is reasonable to assume an unchanged raypath to the firstorder, it is also known that the actual raypaths of Pds and P0 can deviate significantly from their 1-D raypathsin places where strong seismic anomalies, such as subducting slabs and uprising plumes, are present alongthe raypaths (Bijwaard & Spakman, 1999; Serretti & Morelli, 2011; Zhao & Lei, 2004). In principle, the 3-Draypath effect is more important for deep structures since the traveltime perturbation is cumulative.Meanwhile, the ray tracing scheme is time-consuming from the computation point of view since for eachreceiver function, in addition to ray trace the direct P wave, one needs to ray trace the converted S wavefor every conversion depth. In a CCP study, one could easily have a data set composed of ~50,000 receiverfunctions, and with a typical imaging depth range of 200–800 km and depth interval of 1 km, it would bea time-consuming task to conduct 50,000 × 601 + 50,000 times of ray tracing.
Considering the potential problems and computation limitations in the ray tracing scheme, in this study weimplement an efficient numerical eikonal solver, the fast marching method (FMM; Kool et al., 2006; Rawlinson& Sambridge, 2004a, 2004b) in computing ΔtPds. The eikonal equation, which is an infinite frequency approx-imation of the wave equation, is widely used in global seismology (e.g., Benz et al., 1996; Lin et al., 2009),exploration geophysics (<10-km depth; e.g., Zelt & Barton, 1998), and shallow surface geophysics (<100-mdepth; Chen & Zelt, 2017) for calculating traveltimes. Numerous studies have been conducted to compute2-D/3-D traveltimes by solving the eikonal equation (Chen et al., 2016; Korenaga et al., 2000; Vidale, 1988,1990; Zelt & Chen, 2016), which has been demonstrated to be able to account for 3-D raypath effects. Onthe other hand, in CCP imaging, many receiver functions are generated from the same event and are alsorecorded by the same seismic station. This high level of degeneracy has enabled the use of an eikonal solverfor computing the 3-D traveltimes, because one only needs to simulate the traveltime field for each eventand station once.
Recently, Cheng et al. (2016, 2017) implemented the FMM eikonal solver to calculate the Pds traveltimesfor Kirchhoff migration of receiver function data, in which energy in each receiver function is migrated to alarge number of grid points (potential scatters) after incorporating the geometric spreading and elasticscattering pattern. Compared to Kirchhoff migration of Cheng et al. (2016, 2017), the CCP stacking techni-que assumes a 1-D-layered earth, which is appropriate in regional/global scale studies and requires lesscomputation and memory. This, along with the fact that few studies have been done to resolve the poten-tial 3-D raypath effects and computation limitations, has motivated us to use the eikonal solver in comput-ing 3-D Pds traveltimes that are essential for the CCP stacking technique (hereafter referred to as eikonalsolver scheme).
In this paper, we first optimize the FMM eikonal solver parameter setting and validate its accuracy using theiasp91 model. Then, we conduct synthetic tests using models with large velocity anomalies such as subduct-ing slabs and uprising plumes. Comparisons between the two sets of 3-D traveltimes computed from theeikonal solver scheme and the ray tracing approach show that our new scheme can not only account for3-D raypath effects, which could be important in certain circumstance, but also significantly improve thecomputational efficiency. We also apply the eikonal solver scheme to receiver functions computed fromthe USArray stations located around the Yellowstone where large-velocity anomalies in the crust and uppermantle are observed (Huang et al., 2015; Schmandt & Lin, 2014). The CCP stacking results show that using theeikonal solver based ΔtPds leads to a more coherent stacking than using those derived from the ray tracingapproach. We conclude that the proposed eikonal solver scheme is robust and efficient and therefore servesas a good alternative to compute 3-D Pds traveltimes for CCP imaging studies.
2. Method
P-to-S receiver functions investigate the coda of the P wave to look for converted S waves at velocity discon-tinuities. Mathematically, the S wave conversion reaches the receiver at a relative time of (Figure 1):
ΔtPds ¼ tP þ tS � tP0 (1)
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9050

Here tP0 is the traveltime of the direct P wave from the source to receiver.The tP and tS are the P wave and S wave traveltimes from the source to theconversion point and from the conversion point to the receiver, respec-tively. Hereafter, we use δtP0, δtP, and δtS to denote their correspondingcorrection associated with a 3-D model, respectively.
Equation (1) shows the Pds relative traveltime for a single receiver functionat one conversion depth, d. To compute it, the ray tracing scheme requirestwo times of ray tracing, one for the Pds phase and one for the direct Pwave, which only needs to be conducted once for each receiver function.Instead of ray tracing the traveltimes for each receiver function, we firstcompute the P and S wave traveltime fields and then employ 3-D interpo-lation to compute the ΔtPds. In this study, we implement the fm3d eikonalsolver package from Kool et al. (2006) to compute the traveltime field in a3-D volume. The package employs the efficient and unconditionally stablefast marching algorithm in numerically solving the spherical eikonal equa-tion (Sethian, 1996; Sethian & Popovici, 1999),
In general, a receiver function data set used for CCP imaging consists oftens to hundreds of teleseismic events (hereafter referred to as N) thatwere recorded by a seismic array with a total of M stations. When imple-menting the fm3d package, we take the following steps:
(1) For each earthquake, we run the fm3d code to compute the teleseis-mic P wave traveltime field in a 3-D volume to be imaged, Tp(l,m,n)and store the 3-D traveltime table. The P wave traveltimes at theboundary grids of the volume are initialized from the iasp91 P wavetraveltimes (Figure 1a).
(2) For each station, we extract a subvolume with a surface area of 4° × 4°from the 3-D imaging volume with the station sitting at the center ofthe surface area. The size of the area is determined by the spread ofthe P-to-S conversion points at the greatest depth to be imaged,which is ~800 km in our study here. Since all the P800s conversionpoints are located in a circular area with a radius of ~3.6°; hence, weexpect that the 4° × 4° 3-D subvolume chosen here records enoughtraveltime information for events coming from all directions. We thenconsider the station as a virtual point source, propagate S wavethrough the entire 3-D subvolume (Figure 1b), and keep the 3-D Swave traveltime field, Ts(i,j,k).
(3) For every receiver function, we first locate the proper 3-D P wavetraveltime field Tp(l,m,n) and use it to compute the direct P wavetraveltime tP0. Since the 3-D P wavefield grids (open circles inFigure 1a) generally do not overlap with station-based S wavefieldgrids (open squares in Figure 1b), an interpolation is necessary hereto compute tP0. Since a station is always located at the surface ofthe imaging volume, so only the P wave traveltimes of four surfacegrids are necessary to perform the interpolation (Figure 1c). Next foreach hypothetic conversion depth, we first employ the iasp91model to compute the geographic location of the conversion point.We then identify the P wavefield cube that contains the conversionpoint and use the P wave traveltimes at the eight grid points of thecube to compute the P wave traveltime from the earthquake to theconversion point, tP. Similarly, we identify the S wavefield cube thatthe conversion point is located inside and use the S wave travel-times of the eight grid points to calculate the S wave traveltimefrom the conversion point to the station, tS. As shown in
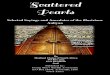
Figure 1. Illustration of the eikonal solver scheme. (a) Teleseismic P wavetraveltime field Tp(l,m,n) is simulated with boundary nodes at the bottomof the computing volume initialized from the iasp91 model. (b) S wavetraveltime field Ts(i, j, k) is computed with the station serving as a virtualsource at the surface. (c) For a specific receiver function, the direct P travel-time tP0 and the incident P traveltime tP from the earthquake to the con-version point are interpolated from P wave traveltime field Tp(l,m,n). The Swave traveltime tS from the conversion point to the station is interpolatedfrom Swave traveltime field Ts(i, j, k), which employs the reciprocity principle.Tp(i, j, k) and Ts(i, j, k) are the P and S wave traveltimes at the P wavefield grid(l, m, and n) and the S wavefield grid (i, j, and k) in the latitude/longitude/radius spherical coordinate, respectively. The ai, bi, and ci are the coefficientsof the linear interpolation of traveltimes of the 4/8 grid points.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9051

Figure 1c, the P wavefield cube (purple square in Figure 1c) andthe S wavefield cube are generally not the same; therefore, twosets of interpolation coefficients are required. Once tP0, tP, and tSare calculated, then the Pds traveltime can be computed:ΔtPds = tP + tS � tP0 (Figure 1c).
Here we make the assumption that the conversion point location of thereceiver function remains the same as that from the 1-D ray tracing. Inthe computation of the converted S wave traveltime, we have employedthe reciprocity principle that the Swave traveltime from a possible conver-sion point to the station is exactly the same as that from the station (virtualsource) to the conversion point (Figure 1c).
3. Grid Parameter Calibration
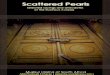
We first compare the Pds traveltimes calculated by the eikonal solverand the traditional ray tracing method in a 1-D reference model. Usingthe iasp91 model, we create a local model from 0 to 680 km in depth,with latitude and longitude both ranging from 0° to 10°. Without lossof generality, we put the receiver at the center of the local model, lati-tude 5° and longitude 5°. In order to choose the best interval settingof the propagation grid of the eikonal solver and balance the accuracyand computation time, we test six sets of grid intervals along thelatitude/longitude direction (Δl) and depth direction (Δh): (1) Δl = 0.50°,Δh = 50 km; (2) Δl = 0.20°, Δh = 20 km; (3) Δl = 0.10°, Δh = 10 km; (4)Δl = 0.05°, Δh = 5 km; (5) Δl = 0.20°, Δh = 5 km; and (6) Δl = 0.05°,Δh = 20 km. The 3-D cells are roughly cubes in the first four settingsand are rectangular cubes in the last two cases. Assuming a source loca-tion of longitude �30° and latitude �45°, we first compute the Pds tra-veltimes in the depth range of 200–680 km using 1-D ray tracing andthe eikonal solver with the above six grid parameters. The ray tracing-based Pds traveltimes are considered to be accurate and are used asthe reference times to evaluate the accuracy of the six solvers. The dif-ferences between the eikonal solver traveltimes and the reference timesrepresent the errors of the solvers (Figure 2a). In general, numericalerrors decreases with decreasing cell size and the parameter setting (4)can well constrain the error within 0.05 s (thick red solid line), which issufficiently accurate for CCP stacking analyses. Furthermore, with theparameter setting (4), we generate 100 events with randomly chosenepicentral distance between 30° and 90°, back azimuth within 0–360°,and focal depth within 0–700 km and compute the Pds traveltime differ-
ence using these 100 events. The results based on parameter setting (4) show that the error can be wellsuppressed to <0.1 s (Figure 2b). Hence, throughout this study we adopt the propagation grid setting ofΔl = 0.05°, Δh = 5 km.
The errors of the two rectangular cubic gridding solvers (5) and (6) are shown in dotted pink line anddashed gray lines, respectively. It seems that (6) Δl = 0.05°, Δh = 20 km has better accuracy than (2)Δl = 0.20°, Δh = 20 km but is worse accurate than (4) Δl = 0.05°, Δh = 5 km, suggesting that both para-meters are important. On the other hand, the purple line of (5) Δl = 0.20°, Δh = 5 km shows very largeerrors. It is even worse accurate than (2) Δl = 0.20°, Δh = 20 km (blue dotted line). We compare the Pand S wave traveltime fields at the common grid points (0.20° × 0.20° × 20 km) shared by settings(2)–(6) and find that the S wave traveltimes of (5) have the largest errors. Since the S wave segments ofthe Pds rays are nearly vertical, therefore, it is more suitable to employ vertically elongated cells (6)Δl = 0.05° < Δh = 20 km than horizontally elongated grids (5) Δl = 0.20° > Δh = 5 km in propagatingthe S wavefield.
Figure 2. (a) An example showing the computational errors of the Pds travel-time plotted as a function of conversion depth. The errors are calculated withthe eikonal solver method using six different grid spacing: (1) Δl = 0.50°,Δh = 50 km; (2)Δl = 0.20°, Δh = 20 km; (3)Δl = 0.10°, Δh = 10 km; (4) Δl = 0.05°,Δh = 5 km; (5) Δl = 0.20°, Δh = 5 km; (6) Δl = 0.05°, Δh = 20 km. Note thaterrors with (4)Δl = 0.05°,Δh = 5 km are less 0.05, sufficiently small for receiverfunction studies. (b) Histogram of the errors computed with 100 randomlygenerated events using grid parameter of (4) Δl = 0.05°, Δh = 5 km.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9052

4. Numerical Test With 3-D Slab and Plume Models
The raypath deviation increases with magnitude of the velocity anomaly in a 3-D model. Therefore, slab andplume models are ideal candidates to test the Pds traveltime correction improvements using the eikonalsolver over the traditional ray tracing approach. For both scenarios, the 3-D volume ranges in depth from 0to 750 km, with latitude and longitude ranging from 0° to 10°. We put 81 stations evenly distributed acrossthe 3–7° × 3–7° area on the surface with interval of 0.5°, and we also randomly generate 81 events similarto what we do in the parameter optimization. In total, we would have 81 × 81 = 6,561 syntheticreceiver functions.
For the slab case, we put a positive velocity anomaly with δlnVP = +2.5%, δlnVP = +5.0%, extending from thesurface to 680-km depth in the iasp91 reference model with a width of 200 km and a dipping angle of 45°(Figure 3a). The map view of the slab and station distribution is shown in Figure 3b. In Figure 3a, for anevent-station pair with the event at longitude �80°, latitude 5°, and a focal depth of 0 km and the stationat longitude 5° and latitude 5°, we plot the raypaths of direct P wave (solid lines) and P660s wave (dashedlines), obtained by the 1-D ray tracing method (thin green lines) and the eikonal solver method (thick yellowlines), respectively. In this case, the P660s path traced from the eikonal solver is quite similar to the iasp91path, while the eikonal solver traced direct P wave path seems to deviate substantially from the iasp91 pathand has a longer segment within the slab. This raypath difference induces a P0 traveltime correction differ-ence (δtP0,ray� δtP0,eikonal) of +0.10 s at the depth of 660 km, which increases to +0.42 s at 540-km depth sincein the ray tracing scheme only velocity anomalies above the conversion depth are taken into account. InFigure 3c, we plot the ΔtP660s,ray � ΔtP660s,eikonal histogram of all the 6,561 receiver functions. The mean ofΔtP660s,ray � ΔtP660s,eikonal is negative, since the main correction differences come from δtP0,ray � δtP0,eikonal,which is positive on average. In extreme cases, ΔtP660s,ray � ΔtP660s,eikonal can reach �1.0 s, resulting in a~10-km difference once it is converted to depth.
For the plume case, we put a negative velocity anomaly with δlnVP =�2.5%, δlnVP =�5.0%, ranging from thesurface to 750 km in the iasp91 reference model with a radius of 1° (Figure 4a). The map view of the plumeand the distribution of the 81 stations is shown in Figure 4b. In Figure 4a, we also plot the P and S waveraypaths for an event-station pair with the event at longitude �40°, latitude 5°, and a focal depth of 0 kmand the station at longitude 5° and latitude 5°. Contrary to the slab model, the S wave path of the P660sconverted wave traced by the eikonal solver departs significantly from the iasp91 path. On the other hand,the direct P wave paths computed from the two methods are almost identical. Hence, this difference inthe S wave ray segment of the P660s introduces a traveltime correction difference (δtS,ray � δtS,eikonal) of+0.23 s. Figure 4c shows the ΔtP660s,ray� ΔtP660s,eikonal histogram of all the 6561 receiver functions computedwith the plumemodel. The mean of ΔtP660s,ray� ΔtP660s,eikonal is positive, because the main differences comefrom δtS,ray � δtS,eikonal, which is positive on average. In extreme cases ΔtP660s,ray � ΔtP660s,eikonal can be aslarge as 4.0 s (Figure 4).
5. Results of the Numerical Investigation
For the slabmodel, in Figure 3d, we plot the distribution of the 6561ΔtP660s,ray�ΔtP660s,eikonal with respect tothe back azimuth. Among the total 6,561 pairs of P660s and P0 raypaths, only 127 pairs have a 3-D traveltimesdifference of greater than 0.50 s, which accounts for 2.7%. These pairs (blue circles in Figure 3d) are all in theback azimuthal range of 210–330°, which is roughly parallel to the subduction direction of the slab. Both thedirect P and P660s arrive underneath the subducting slab, and hence, the 3-D raypath effects are expected tobe the strongest. Themean and standard deviation of the P660s correction differences calculated from all the81 events are in the ranges of �0.27–0.03 and 0.01–0.26 s, respectively, as illustrated in Figures 3e and 3f.Meanwhile, Figures 3g and 3h show the mean and standard deviation of the P660s correction differenceof the 81 stations, which lie in the range of �0.19–0.01 and 0.07–0.15 s, respectively. Both the event- andstation-based means and standard deviations are relatively small, which suggests that the 3-D raypath effectof the particular slab shown in Figure 3 is likely insignificant. Consequently, even if all the events in a receiverfunction data set are limited in a narrow back azimuthal range, or all the stations are clustered in a specificarea, the CCP stacking images using 3-D Pds traveltimes computed from the ray tracingmethod and the eiko-nal solver scheme are expected to be quite similar.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9053

Figure 3. Numerical tests using a slab model. (a) A depth section showing the subducting slab with a horizontal widthscale of 200 km. The iasp91 and eikonal direct P wave paths are plotted in thin green and thick yellow solid lines,respectively. The S wave segment of the 1-D iasp91 and 3-D P660s conversion phase are plotted with the thin green andthick yellow dashed lines, respectively. (b) Map view of the slab at the surface and the 680-km depth, together with thedistribution of 81 hypothetic stations. (c) Histogram of ΔtP660s,ray � ΔtP660s,eikonal of the 6561 source-receiver pairscomputed with the slab model shown in (a) with blue bins denoting differences less than �0.5 s. (d) The calculated6,561 ΔtP660s,ray� ΔtP660s,eikonal are plotted as a function of back azimuth with blue circles denoting differences less than�0.5 s. (e) Histogram of the 81 event-based means. (f) Histogram of the 81 event-based standard deviations. (g) Histogramof the 81 station-based means. (h) Histogram of the 81 station-based standard deviations.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9054

Figure 4. Numerical tests with a plume model. (a) A depth section showing the uprising plume with a diameter of 2°.Raypaths are plotted in a similar way of Figure 3a. (b) Map view of the plume and the distribution of the 81 stations.(c) Histogram of ΔtP660s,ray � ΔtP660s,eikonal of the 6,561 source-receiver pairs computed with the plume model shown in(a). Red and blue bins denote differences ≥0.5 and ≤ �0.5 s, respectively. (d) The calculated 6,561 ΔtP660s,ray � ΔtP660s,eikonal are plotted as a function of epicentral distance. The red triangles and blue circles denote differences ≥0.5and ≤ �0.5 s, respectively. (e–h) Same with Figures 3e–3h.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9055

For the axially symmetric plume model, we plot the P660s correction dif-ferences of the 6,561 receiver functions as a function of epicentral distance(Figure 4d). While most of the calculated differences lie between �0.50and 0.50 s (black squares), there are 787 (~12.0%) outliers (red trianglesand blue circles) that have a difference larger than 0.50 s across the epicen-tral distance range of 30–90° (red and blue bins in Figure 4c). We do notsee any epicentral distance range that shows a particularly strong 3-Deffect. Figures 4e and 4f show the event-based mean and standard devia-tion of the P660s correction differences, which are distributed in the rangeof 0.01–0.26 and 0.22–0.40 s, respectively. Since the plume model here hasan axial symmetry with a vertical axis, events with different back azimuthdirection are expected to experience the same amount of raypath distor-tion. The station-based mean and standard deviation of the 81 stationsare shown in Figures 4g and 4h, respectively. The mean lies between�0.12 and 1.26 s, and the standard deviation falls in the range of0.06–1.43 s. In contrast to the slab case, 8 stations (~9.9%) possess a meandifference ≥0.50 s and 16 stations (~19.8%) have a standard deviation≥0.80 s, indicating that the 3-D raypath effect induced by the low-velocityanomaly of the plume here is nonnegligible. In fact, these stations arelocated near the boundary of the plume, where the 3-D raypath effect isthe severest (Figure 5). Hence, if in a study area where a plume existsand we only have receiver function data from the stations near the plumeboundary, then the raypath integration based 3-D Pds traveltimes couldnot only misplace the 660-km discontinuity but also cause destructivestacking when they are used in CCP imaging.
6. Application of Yellowstone USArray Data
For real data application, we select a total of 16,237 receiver functions withhigh signal-to-noise ratio recorded by a subset stations of the transporta-ble array near the Yellowstone hotspot. The transportable array stationdistribution is shown in Figure 6a. Again, the iasp91 model is employedas the reference model and the 3-D perturbation model from Schmandtand Lin (2014) is used. The largest seismic anomaly in this area is relatedto the Yellowstone plume (Dueker & Sheehan, 1997; Gao & Liu, 2014;Huang et al., 2015; Schmandt et al., 2012), and the strongest negativevelocity anomaly reach ~�10%. Figure 7a shows a vertical profile of theVs perturbations along the NW-SE oriented A–A’ line in Figure 6a, wherestrong negative anomalies continue from a depth of ~80 km downward
to ~700 km deep. In the CCP stacking, we set the radius of the circular cap to be 1° in gathering receiverfunctions and depth interval to be equal to 1 km. We calculate 3-D Pds traveltimes using both the eikonalsolver and the ray tracing schemes, together with the 1-D Pds traveltimes of the iasp91 model. For the geo-graphic location of (45.6°N, 110.2°W), we show the nth-root CCP stacks (n = 2) using the aforementionedthree sets of Pds traveltimes in Figure 6b. While all three sets of Pds traveltimes image the 410-km disconti-nuity well, their performances differ significantly in imaging the 660-km discontinuity. Due to the complexvelocity structure in the mantle transition zone (Figure 7a), the CCP stack with the 1-D Pds traveltimespredicted by the iasp91 model shows a broad and diffused 660-km discontinuity. In other words, thelow-amplitude P660s signal spreads widely across a depth range between 640 and 690 km (green dashed linein Figure 6b). On the other hand, the ray tracing scheme seems to be able to capture the traveltime perturba-tions along the 1-D raypaths and the corresponding CCP stack has a focused P660s signal at a depth of~655 km (blue dotted line in Figure 6b). However, the P660s on the stack using the eikonal solver basedPds traveltimes seems to be even better focused (red solid line in Figure 6b), which also centers at~655 km deep, but with an amplitude being ~1.57 times of the amplitude of the blue dotted line. Thissuggests that there exist nonnegligible 3-D raypath effects that are not accurately accounted by using the
Figure 5. Map showing the distribution of the station-based mean (a) andstandard deviation (b) of ΔtP660s,ray � ΔtP660s,eikonal calculated at the 81hypothetic stations.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9056

1-D raypath-based corrections due to the presence of large and wide-spread velocity anomalies. In Figure 6c, we show the histogram ofΔtP660s,ray � ΔtP660s,eikonal computed from the 588 receiver functionsgathered in the circular cap centered at (45.6°N, 110.2°W).
In order to further understand the influence of the 3-D velocity structureon the P660s raypaths, we choose a receiver function that has a 1-D greatcircle raypath along the A–A’ line shown in Figure 6a. The green cross andtriangle indicate the P660s conversion point and the seismic station,respectively. In Figure 7a, the iasp91 ray traced S wave segment of theP660s is shown by the black dashed line. For comparison, the projectionof the eikonal solver traced S wave path on the A–A’ plane is also shownhere by the white dashed line. The iasp91 S wave segment travels throughthe largest negative anomaly in the depth range of 400–600 km and entersthe positive anomaly at a depth of ~200 km. By contrast, the eikonal solvertraced S wave path bends around the lowest-velocity anomaly between400 and 600 km deep and enters the positive anomaly earlier at~300 km deep. Even though the eikonal solver traced S wave travels alonger distance, it still arrives the station earlier by 0.76 s, which is alsoan example of the wavefront healing effect. Figure 7b shows the S wavevelocity perturbation along the iasp91 S wave raypath (black dashed line)and the eikonal solver traced S wave raypath (white dashed line), respec-tively. The S wave velocity along the eikonal solver-based trajectory isalways larger than that along the iasp91 ray at every depth, which explainswhy the S wave indicated by the detouring thin white dashed line arrivesearlier than that shown by the thick black dashed ray despite itslonger raypath.
7. Discussion
As mentioned in section 2, we have assumed a 1-D conversion point incomputing the Pds traveltimes. We have conducted extensive investiga-tion on how this assumption could have affected our results. We employthe above slab model and compute a total of 1,950 (78 events × 25stations) 3-D raypaths of P500s. The computed 3-D conversion points arelaterally shifted by 0.006–0.349° with an average of 0.108° and a standarddeviation of 0.058°. The resulting P500s traveltime differences are less than0.1 s, which is very small when compared with traveltime anomaliescaused by the high-velocity slab, as well as the dominant periods (1–2 s)of receiver functions. Since a 3-D raypath is required to compute the 3-Dconversion point, this means that 3-D ray tracing must be performed,which could significantly increase computing time. Therefore, we thinkthat the 1-D conversion point assumption is reasonable and helps thecomputing efficiency.
As described in the results of the slab model in section 5, only 2.7% ofP660s and P0 pairs suffer from raypath distortions that result in a traveltimediscrepancy (ΔtP660s,ray� ΔtP660s,eikonal) of larger than 0.5 s. The event- andstation-based means and standard deviations are all less than 0.5 s, andhence, CCP images with the two sets of 3-D Pds traveltime data computedby the raypath integration and eikonal solver schemes are expected to becomparable. To ensure that these are not the special features of the simpleslab geometry employed in Figure 3, we create another slab model with abending geometry. The slab has a dipping angle of 30° above the depth of300 km and changes to 60° in the depth range of 300–680 km (Figure 8a).
Figure 6. (a) Topographic map of the Yellowstone hotspot. Red trianglesdenote stations of the transportable array. (b) Second root stacks of recei-ver functions using 1-D Pds traveltimes of the iasp91 model (green dashedline) and 3-D Pds traveltimes calculated from the raypath integrationapproach (blue dotted line) and the eikonal solver method (red solid line).Note that the stacked receiver function shown in red solid line using theeikonal solver Pds traveltimes has the best focused signal at a depth of~660 km. (c) Histogram showing the distribution of ΔtP660s,ray � ΔtP660s,eikonal computed from the 588 receiver functions in the circular cap at cen-tered at (45.6°N, 110.2°W).
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9057

The horizontal dimension of the slab is kept fixed to 200 km.With the sameevent and station geometry used in section 4, we generate a total of 6,561source-receiver pairs and computed 3-D P660s traveltimes with theraypath integration approach and the eikonal solver method. Figure 8bshows the histogram of ΔtP660s,ray � ΔtP660s,eikonal, which shows a signifi-cant increase of raypaths with a discrepancy larger than 0.5 s (red and bluebars in Figure 8b). Among the 6,561 source-receiver pairs, 773 pairs(~11.8%) show a 3-D raypath effect of ≥0.5 s. All the earthquakes arelocated in the landside of the subduction zone with a back azimuthaldistribution of ~180–360° (Figure 8c), much broader than the 210–330°range shown in Figure 3d. Another unique feature of these outliers isthat the traveltime differences are mixed with positive (red triangles inFigure 8c) and negative anomalies (blue circles in Figure 8c), whichsuggests that the 3-D raypath effects on P660s and P0 from the bendingslab is more complicated. We also compute the event- and station-basedmeans and standard deviations of traveltime differences and findthat means are in the range of �0.177–0.288 and �0.077–0.398 s, respec-tively, while the standard deviations lie between 0.028 and 0.569 s andbetween 0.118 and 0.424 s, respectively. Overall, using raypath-based3-D corrections to compute 3-D Pds traveltime is still capable to producingreasonably good CCP images and hence the 3-D raypath effects are stillnot so important.
The plume shown in Figure 4 is substantially large with a diameter of morethan 200 km and extends to the lower mantle. For comparison, we alsocreate a relatively small-sized plumewith a radius of 0.5° that extends fromthe surface to a depth of 400 km (Figure 8d). The computed 6561 3-DP660s traveltime differences with the two method (ΔtP660s,ray � ΔtP660s,eikonal) are shown in Figures 8e and 8f. Although the low-velocity anomalyvolume is significantly reduced, we still find significant traveltime differ-ences up to 3.2 s (red bars in Figure 8e) across all the distance range (redtriangles in Figure 8f). Among the 6,561 source-receiver pairs, 510 pairs(~7.8%) show a 3-D raypath effect of ≥0.5 s. The station-base mean liesbetween 0.17 and 1.07 s, and the standard deviation falls in the range of0.04–0.92 s. Both are slightly smaller than, but still comparable to, thoseof the plume model shown in Figure 4. There are seven stations (~8.6%)that have a difference mean greater than 0.5 s and the same amount ofstations (seven stations, ~8.6%) that have a standard deviation greaterthan 0.5 s. These results again suggest that 3-D raypath effects must betaken into account when vertically coherent low-velocity anomalies arepresent underneath a seismic array.
The 3-D P660s traveltime corrections of the four hypothetic slab andplumes are very large, ranging from�4.3 to 6.4 s, which can introduce sig-nificant errors in the estimated depths of the 660-km discontinuity. This iswell illustrated in Yellowstone example shown in Figure 6b; the 660-kmdiscontinuity imaged with the 1-D iasp91 traveltime data spreads in adepth range of 640–690 km with a centroid depth of 675 km, which isabout ~20 km deeper than those estimated from the 3-D Pds traveltimedata. The 660-km seismic discontinuity that separates the upper andlower mantle is thought to be caused by the temperature sensitive phasetransition from ringwoodite to perovskite plus magnesiowustite (Ito &Takahashi, 1989). Lateral variations of the seismic discontinuity have beenwidely used to infer temperature variations at the base of the transitionzone. Therefore the ~20-km difference could result in very different
Figure 7. (a) Depth profile of the Swave velocity perturbations along the A–A’line in Figure 6a. The black dashed line represents the S wave segment of theP660s converted wave traveling along the great circle of A–A’ line. Thewhite solid line indicates the projection of 3-D S wave raypath calculated bythe eikonal solver method onto the A–A’ plane. (b) Swave perturbations alongthe iasp91 (black dashed line) and the eikonal solver (white solid line)traced S wave segments are shown as a function of depth in the rangeof 0–660 km. Note that at each depth, the eikonal solver traced S wavesegment (while solid line) samples a point with a higher S wave velocity thanthe iasp91 raypath does.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9058

estimates of temperature within the mantle transition zone beneath Yellowstone, which is essential to theunderstanding of geodynamic processes beneath the hotpot.
Our numerical tests also suggest that lateral heterogeneities not only affect the traveltime along a 1-Draypath but also cause a distortion of the 1-D raypath. This distortion affects CCP imaging in two ways.First, it can cause additional traveltime changes, which directly affect the estimate of conversion depth as wellas cause destructive stacking. We find this is particularly true when a limited amount of source-receivergeometry is available. Second, a lateral shift in 3-D conversion points implies that P-to-S conversion eventscould be misplaced horizontally. However, our numerical tests indicate that the lateral shifts of the conver-sion points are generally around 0.1°, much less that the bin size used in gathering receiver functions as wellas the size of the Pds Fresnel zone. Therefore, we conclude that the main influence of 3-D raypaths is on thetraveltime side, which affects the vertical, not the horizontal positioning of conversion events.
Figure 8. (a) A depth section showing the bending slab used as the second slab model. The slab dips at 30° above 300-kmdepth and 60° between 300 and 680 km. The horizontal length of the slab is 200 km. (b and c) Similar to Figures 3c and 3dbut for the bending slab model. (d) A depth section showing the narrow and shallow plume used as the second plumemodel. The radius and depth extension of the plume is 0.5° and 400 km, respectively. (e and f) Similar to Figures 4c and 4dbut for the narrow plume model.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9059

As mentioned in section 1, the efficiency of the eikonal solver scheme liesin the fact that it utilizes the high-level degeneracy in the receiver functiondata set. Therefore, the traveltime fields are efficiently recycled in calculat-ing the Pds traveltimes, unlike in the traditional ray tracing scheme forevery conversion point of each receiver function, one has to ray tracethe converted S wave raypath. To have a direct comparison of the compu-tation efficiency between those two schemes, we first fix the number ofevents as 200, which is an appropriate estimation for a typical 1-yearteleseismic records. The number of stations is set to be 100, 200, 500and 1,000, sequentially, depicting the decreased interval between stations.The corresponding number of receiver functions would be 20,000, 40,000,100,000, and 200,000, respectively. In Figure 9, we plot the computationtime needed for the ray tracing scheme (blue circle), P and S wave travel-time field simulation (red square), and receiver function Pds traveltime cal-culation (gray triangle) in the eikonal solver scheme. With the efficientrecycling of traveltime fields, the computation time for receiver functionPds traveltime calculation is even less than that of P and S traveltime fieldscalculation by 1 order of magnitude. In practice, the eikonal solver schemeraises the computation efficiency by roughly 24, 40, 66, and 84 times overthe ray tracing method for the four sets of station configuration, whichillustrates its overwhelming advantage especially for large data sets.Beyond that, the Pds traveltimes computing can be easily parallelized
since receiver functions are independent with each other.
So far we have conducted the P wave traveltime field calculation for a ~10° × ~10° study area. However, forlarge-scale continental arrays, such as the USArray, which covers an area of ~60° × ~30°, it would be anunwise choice to directly implement the eikonal solver scheme at the whole-array scale since the computa-tion and storage costs are tremendous. It is actually more practical to divide the entire array intoseveral subarrays.
8. Conclusions
In this study, we have proposed a new scheme to compute receiver function Pds traveltimes by implement-ing the eikonal solver with FMM. Calibration with the 1-D iasp91 model indicates that the new scheme hasadequate accuracy with a grid spacing of 0.05° × 0.05° × 5 km along longitude, latitude, and depth directions.Numerical tests with 3-D slab and plume models demonstrate that the eikonal solver method can accommo-date effects of 3-D raypaths that results in accurate calculation of Pds traveltimes. Application of the eikonalsolver method to a receiver function data set recorded by USArray stations around the Yellowstone hotspotfurther shows that the newmethod can lead to better CCP images withmore focused P660s and better depthestimates of the 660 km. Our numerical investigation also shows that computation efficiency of the eikonalsolver method is approximately 1–2 orders of magnitude better than the traditional raypath-based integra-tion approach. Therefore, the proposed eikonal solver scheme here serves as a well-behaved and promisingsubstitute to traditional ray tracing correction approach, and we would expect this method to be a powerfultool specially in studying areas underlain by large-scale prominent velocity anomalies, such as subductionzones and mantle plume regions.
ReferencesAmmon, C. J. (1991). The isolation of receiver effects from teleseismic P waveforms. Bulletin of the Seismological Society of America, 81(6),
2504–2510.Benz, H. M., Chouet, B. A., Dawson, P. B., Lahr, J. C., Page, R. A., & Hole, J. A. (1996). Three-dimensional P and S wave velocity structure of
Redoubt Volcano, Alaska. Journal of Geophysical Research, 101(B4), 8111–8128. https://doi.org/10.1029/95JB03046Bijwaard, H., & Spakman, W. (1999). Fast kinematic ray tracing of first- and later-arriving global seismic phases. Geophysical Journal
International, 139(2), 359–369. https://doi.org/10.1046/j.1365-246x.1999.00950.xChen, J., & Zelt, C. (2017). Comparison of full wavefield synthetics with frequency-dependent traveltimes calculated using wavelength-
dependent velocity smoothing. Journal of Environmental and Engineering Geophysics, 22(2), 133–141. https://doi.org/10.2113/JEEG22.2.133
Figure 9. CPU times for conducting ray tracing, calculating the P and S wavetraveltime fields, and computing receiver function Pds traveltimes are shownas a function of the number of seismic stations as well as the number ofraypaths. The number of teleseismic events is set to 200.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9060
AcknowledgmentsWe would like to thank the IRIS datacenter for providing the TA station data(https://doi.org/10.7914/SN/TA). Thefacilities of IRIS Data Services, andspecifically the IRIS Data ManagementCenter, were used for access towaveforms, related metadata, and/orderived products used in this study. IRISData Services are funded through theSeismological Facilities for theAdvancement of Geoscience andEarthScope (SAGE) Proposal of theNational Science Foundation underCooperative Agreement EAR-1261681.The FMM eikonal solver is downloadedfrom http://rses.anu.edu.au/seismology/soft/fmmcode/. We thankJonathan Delpth for helpful discussion.We also thank the Associate Editor andthe anonymous reviewer for theirconstructive comments andsuggestions, which significantlyimproved the quality of this paper. Thiswork is supported by NSF EAR-1547228.

Chen, J., Zelt, C., & Jaiswal, P. (2016). Detecting a known near-surface target through application of frequency-dependent traveltimetomography and full-waveform inversion to P- and SH-wave seismic refraction data. Geophysics, 82(1), R1–R17. https://doi.org/10.1190/geo2016-0085.1
Cheng, C., Bodin, T., & Allen, R. M. (2016). Three-dimensional pre-stack depth migration of receiver functions with the fast marching method:A Kirchhoff approach. Geophysical Journal International, 205(2), 819–829. https://doi.org/10.1093/gji/ggw062
Cheng, C., Bodin, T., Tauzin, B., & Allen, R. M. (2017). Cascadia subduction slab heterogeneity revealed by three-dimensional receiver functionKirchhoff migration. Geophysical Research Letters, 44, 694–701. https://doi.org/10.1002/2016GL072142
Dueker, K. G., & Sheehan, A. F. (1997). Mantle discontinuity structure from midpoint stacks of converted P to S waves across the Yellowstonehotspot track. Journal of Geophysical Research, 102(B4), 8313–8327. https://doi.org/10.1029/96JB03857
Eagar, K. C., Fouch, M. J., & James, D. E. (2010). Receiver function imaging of upper mantle complexity beneath the Pacific Northwest, UnitedStates. Earth and Planetary Science Letters, 297(1-2), 141–153. https://doi.org/10.1016/j.epsl.2010.06.015
Gao, S. S., & Liu, K. H. (2014). Mantle transition zone discontinuities beneath the contiguous United States. Journal of Geophysical Research:Solid Earth, 119, 6452–6468. https://doi.org/10.1002/2014JB011253
Gilbert, H. J., Sheehan, A. F., Dueker, K. G., & Molnar, P. (2003). Receiver functions in the western United States, with implications for uppermantle structure and dynamics. Journal of Geophysical Research, 108(B5), 2229. https://doi.org/10.1029/2001JB001194
Grand, S. P., & Helmberger, D. V. (1984). Upper mantle shear structure of North America. Geophysical Journal International, 76(2), 399–438.https://doi.org/10.1111/j.1365-246X.1984.tb05053.x
Guan, Z., & Niu, F. (2017). An investigation on slowness-weighted CCP stacking and its application to receiver function imaging. GeophysicalResearch Letters, 44, 6030–6038. https://doi.org/10.1002/2017GL073755
Huang, H.-H., Lin, F.-C., Schmandt, B., Farrell, J., Smith, R. B., & Tsai, V. C. (2015). The Yellowstone magmatic system from the mantle plume tothe upper crust. Science, 348(6236), 773–776. https://doi.org/10.1126/science.aaa5648
Ito, E., & Takahashi, E. (1989). Postspinel transformations in the system Mg2SiO4-Fe2SiO4 and some geophysical implications. Journal ofGeophysical Research, 94(B8), 10,637–10,646. https://doi.org/10.1029/JB094iB08p10637
Kennett, B. L. N., & Engdahl, E. R. (1991). Traveltimes for global earthquake location and phase identification. Geophysical JournalInternational, 105(2), 429–465. https://doi.org/10.1111/j.1365-246X.1991.tb06724.x
Kool, M., de Rawlinson, N., & Sambridge, M. (2006). Practical grid-based method for tracking multiple refraction and reflection phases inthree-dimensional heterogeneous media. Geophysical Journal International, 167(1), 253–270. https://doi.org/10.1111/j.1365-246X.2006.03078.x
Korenaga, J., Holbrook, W. S., Kent, G. M., Kelemen, P. B., Detrick, R. S., Larsen, H.-C., et al. (2000). Crustal structure of the southeast Greenlandmargin from joint refraction and reflection seismic tomography. Journal of Geophysical Research, 105(B9), 21,591–21,614. https://doi.org/10.1029/2000JB900188
Lin, F.-C., Ritzwoller, M. H., & Snieder, R. (2009). Eikonal tomography: Surface wave tomography by phase front tracking across aregional broad-band seismic array. Geophysical Journal International, 177(3), 1091–1110. https://doi.org/10.1111/j.1365-246X.2009.04105.x
Liu, Z., Niu, F., Chen, Y. J., Grand, S., Kawakatsu, H., Ning, J., et al. (2015). Receiver function images of the mantle transition zone beneath NEChina: New constraints on intraplate volcanism, deep subduction and their potential link. Earth and Planetary Science Letters, 412,101–111. https://doi.org/10.1016/j.epsl.2014.12.019
Niu, F. (2014). Distinct compositional thin layers at mid-mantle depths beneath northeast China revealed by the USArray. Earth and PlanetaryScience Letters, 402, 305–312. https://doi.org/10.1016/j.epsl.2013.02.015
Niu, F., & Kawakatsu, H. (1998). Determination of the absolute depths of the mantle transition zone discontinuities beneath China:Effect of stagnant slabs on transition zone discontinuities. Earth, Planets and Space, 50(11-12), 965–975. https://doi.org/10.1186/BF03352191
Niu, F., Levander, A., Cooper, C. M., Lee, C.-T. A., Lenardic, A., & James, D. E. (2004). Seismic constraints on the depth and composition of themantle keel beneath the Kaapvaal craton. Earth and Planetary Science Letters, 224(3–4), 337–346. https://doi.org/10.1016/j.epsl.2004.05.011
Niu, F., Levander, A., Ham, S., & Obayashi, M. (2005). Mapping the subducting Pacific slab beneath southwest Japan with Hi-net receiverfunctions. Earth and Planetary Science Letters, 239(1–2), 9–17. https://doi.org/10.1016/j.epsl.2005.08.009
Rawlinson, N., & Sambridge, M. (2004a). Multiple reflection and transmission phases in complex layered media using a multistage fastmarching method. Geophysics, 69(5), 1338–1350. https://doi.org/10.1190/1.1801950
Rawlinson, N., & Sambridge, M. (2004b). Wave front evolution in strongly heterogeneous layered media using the fast marching method.Geophysical Journal International, 156(3), 631–647. https://doi.org/10.1111/j.1365-246X.2004.02153.x
Schmandt, B., Dueker, K., Humphreys, E., & Hansen, S. (2012). Hot mantle upwelling across the 660 beneath Yellowstone. Earth and PlanetaryScience Letters, 331-332, 224–236. https://doi.org/10.1016/j.epsl.2012.03.025
Schmandt, B., Dueker, K. G., Hansen, S. M., Jasbinsek, J. J., & Zhang, Z. (2011). A sporadic low-velocity layer atop the western U.S. mantletransition zone and short-wavelength variations in transition zone discontinuities. Geochemistry, Geophysics, Geosystems, 12, Q08014.https://doi.org/10.1029/2011GC003668
Schmandt, B., Jacobsen, S. D., Becker, T. W., Liu, Z., & Dueker, K. G. (2014). Dehydration melting at the top of the lower mantle. Science,344(6189), 1265–1268. https://doi.org/10.1126/science.1253358
Schmandt, B., & Lin, F.-C. (2014). P and S wave tomography of the mantle beneath the United States. Geophysical Research Letters, 41, 1–14.https://doi.org/10.1002/2014GL061231
Serretti, P., & Morelli, A. (2011). Seismic rays and traveltime tomography of strongly heterogeneous mantle structure: Application to theCentral Mediterranean. Geophysical Journal International, 187(3), 1708–1724. https://doi.org/10.1111/j.1365-246X.2011.05242.x
Sethian, J., & Popovici, A. (1999). 3-D traveltime computation using the fast marching method. Geophysics, 64(2), 516–523. https://doi.org/10.1190/1.1444558
Sethian, J. A. (1996). A fast marching level set method for monotonically advancing fronts. Proceedings of the National Academy of Sciences ofthe United States of America, 93(4), 1591–1595. https://doi.org/10.1073/pnas.93.4.1591
Shearer, P. M., & Masters, T. G. (1992). Global mapping of topography on the 660-km discontinuity. Nature, 355(6363), 791–796. https://doi.org/10.1038/355791a0
Tauzin, B., van der Hilst, R. D., Wittlinger, G., & Ricard, Y. (2013). Multiple transition zone seismic discontinuities and low velocity layers belowwestern United States: Seismic discontinuities below western U.S. Journal of Geophysical Research: Solid Earth, 118, 2307–2322. https://doi.org/10.1002/jgrb.50182
Vidale, J. (1988). Finite-difference calculation of traveltimes. Bulletin of the Seismological Society of America, 78(6), 2062–2076.
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9061

Vidale, J. (1990). Finite-difference calculation of traveltimes in three dimensions. Geophysics, 55(5), 521–526. https://doi.org/10.1190/1.1442863
Vidale, J. E., & Benz, H. M. (1992). Upper-mantle seismic discontinuities and the thermal structure of subduction zones. Nature, 356(6371),678–683. https://doi.org/10.1038/356678a0
Walck, M. C. (1984). The P-wave upper mantle structure beneath an active spreading center: The Gulf of California. Geophysical JournalInternational, 76(3), 697–723. https://doi.org/10.1111/j.1365-246X.1984.tb01918.x
Zelt, C. A., & Barton, P. J. (1998). Three-dimensional seismic refraction tomography: A comparison of two methods applied to data from theFaeroe Basin. Journal of Geophysical Research, 103(B4), 7187–7210. https://doi.org/10.1029/97JB03536
Zelt, C. A., & Chen, J. (2016). Frequency-dependent traveltime tomography for near-surface seismic refraction data. Geophysical JournalInternational, 207(1), 72–88. https://doi.org/10.1093/gji/ggw269
Zhao, D., & Lei, J. (2004). Seismic ray path variations in a 3D global velocity model. Physics of the Earth and Planetary Interiors, 141(3), 153–166.https://doi.org/10.1016/j.pepi.2003.11.010
10.1029/2018JB015892Journal of Geophysical Research: Solid Earth
GUAN AND NIU 9062