Embed Size (px)
Citation preview

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 1 of 14
IAC-14.D2.8-A5.4.2
COOPERATIVE SCENARIOS FOR HUMAN EXPLORATION BEYOND LOW EARTH ORBIT
Jonathan Battat
Massachusetts Institute of Technology, USA, [email protected]
Oleg Alifanov, Robert Braun, Edward Crawley, John Logsdon, Lev Zeleny, Mariel Borowitz, Emanuele
Capparelli, Peter Davison, Alessandro Golkar, Bradley Steinfeldt
There is an international need to define a concrete strategy and plan to implement that strategy for the initial human
exploration missions beyond Low Earth Orbit (LEO). Across all stakeholders, there is a growing consensus that the
long term objective of global human space exploration is the long duration presence of people on the Martian surface.
Along the pathway between current activities in LEO and eventual Mars outposts are a variety of preparatory
exploration missions and intermediate goals. Over the last decade several different initial steps along these pathways
beyond LEO have been proposed. It is important to build international consensus on such a plan soon because future
missions require near-term investments for new capabilities with no single nation committing resources to achieve all
the steps of an ambitious program on its own. The goal of this work is to enumerate and evaluate scenarios for
cooperative missions beyond LEO that achieve incremental development of human exploration capabilities. Towards
the goal of generating scenarios for cooperative missions beyond LEO, proposed missions and capabilities from a
variety of international actors have been assessed. Presented in this paper are results of a survey of proposed missions
and a series of interviews with industry experts knowledgeable about both the technical and geopolitical issues in
forging a sustainable path towards Mars. There are four realistic proposals for initial human exploration beyond LEO:
a cis-Lunar habitat, asteroid redirect, Mars flyby, and a Lunar surface sortie. In the absence of top-down agreements,
such as those governing the International Space Station, that specify partnership responsibilities and privileges, ad-hoc
exchanges within individual development projects or for specific mission capabilities is most likely to facilitate
international cooperation in the coming years. General LEO transportation logistics and habitation functions are shared
by many actors and allow for exchange of services and utilization of exploration assets if designed into the critical
path. Given the early stage of readiness, it is possible that subsystem-level coordination could be pursued for an
advanced habitation element. Other technologies are either niche (robotics) or have national sensitivities (in-space
propulsion) that make them less desirable for subsystem-level coordination.
1. PLANNING AN INTERNATIONAL
ENTERPRISE
Future human spaceflight programs need to be
designed with sustainability in mind. A program that is
both ambitious enough to foster broad support yet sized
for realistic budgets will have to leverage international
partners for cost and risk sharing. While there is a debate
over the additional costs associated with international
coordination and integration as compared to its cost-
sharing and program sustainability benefits, the world’s
space agencies have said meeting the ultimate goal of
Mars surface missions must be an international effort*.
As individuals pursue the planning and execution of an
exploration pathway from LEO towards Mars, they must
consider both the technologies and the institutions that
will bring humanity to this long term goal.
In August 2013 the International Space Exploration
Coordination Group (ISECG) released an updated Global
Exploration Roadmap (GER) [1]. The work of 12 space
agencies, this roadmap provides a vision of the long-term
* Along with the ISECG, multiple experts groups and
state policies have called for the necessity of international
partners in future exploration programs. Some of these
goals and objectives for human space exploration. The
GER details a number of missions that are preparatory
for eventual sustained presence of humans on the Martian
surface. Most importantly this roadmap reflects a
cooperative relationship between several agencies that
must work together to achieve any ambitious future
exploration program. In the roadmap, the ISECG notes
that the GER is published in the hope of eliciting a
response from the “broader community.” The specific
contribution of the ISECG’s work is intended to advance
planning activities for international missions that will
occur along the roadmap. The ISECG includes a set of
missions that may be achieved in an international way,
but stops short of suggesting how these missions will be
coordinated and executed.
Towards the goal of building a sustainable
exploration enterprise, we propose scenarios that trace
mission technology needs to the capabilities of
participating actors and the rationales for such
contributions.
statements are found in the following references: [2], [3],
[4], [5], [6], [7], [8], [9]
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 2 of 14
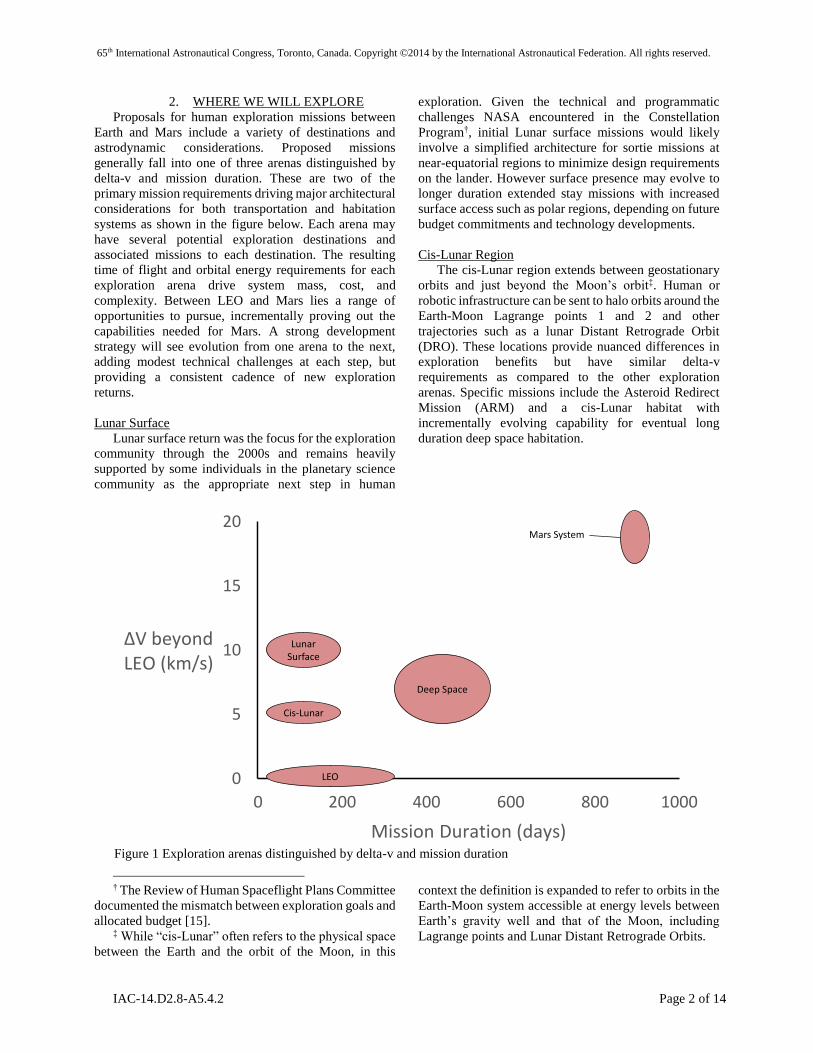
2. WHERE WE WILL EXPLORE
Proposals for human exploration missions between
Earth and Mars include a variety of destinations and
astrodynamic considerations. Proposed missions
generally fall into one of three arenas distinguished by
delta-v and mission duration. These are two of the
primary mission requirements driving major architectural
considerations for both transportation and habitation
systems as shown in the figure below. Each arena may
have several potential exploration destinations and
associated missions to each destination. The resulting
time of flight and orbital energy requirements for each
exploration arena drive system mass, cost, and
complexity. Between LEO and Mars lies a range of
opportunities to pursue, incrementally proving out the
capabilities needed for Mars. A strong development
strategy will see evolution from one arena to the next,
adding modest technical challenges at each step, but
providing a consistent cadence of new exploration
returns.
Lunar Surface
Lunar surface return was the focus for the exploration
community through the 2000s and remains heavily
supported by some individuals in the planetary science
community as the appropriate next step in human
† The Review of Human Spaceflight Plans Committee
documented the mismatch between exploration goals and
allocated budget [15]. ‡ While “cis-Lunar” often refers to the physical space
between the Earth and the orbit of the Moon, in this
exploration. Given the technical and programmatic
challenges NASA encountered in the Constellation
Program†, initial Lunar surface missions would likely
involve a simplified architecture for sortie missions at
near-equatorial regions to minimize design requirements
on the lander. However surface presence may evolve to
longer duration extended stay missions with increased
surface access such as polar regions, depending on future
budget commitments and technology developments.
Cis-Lunar Region
The cis-Lunar region extends between geostationary
orbits and just beyond the Moon’s orbit‡. Human or
robotic infrastructure can be sent to halo orbits around the
Earth-Moon Lagrange points 1 and 2 and other
trajectories such as a lunar Distant Retrograde Orbit
(DRO). These locations provide nuanced differences in
exploration benefits but have similar delta-v
requirements as compared to the other exploration
arenas. Specific missions include the Asteroid Redirect
Mission (ARM) and a cis-Lunar habitat with
incrementally evolving capability for eventual long
duration deep space habitation.
context the definition is expanded to refer to orbits in the
Earth-Moon system accessible at energy levels between
Earth’s gravity well and that of the Moon, including
Lagrange points and Lunar Distant Retrograde Orbits.
0
5
10
15
20
0 200 400 600 800 1000
ΔV beyond LEO (km/s)
Mission Duration (days)
LEO
Cis-Lunar
Deep Space
Lunar Surface
Mars System
Figure 1 Exploration arenas distinguished by delta-v and mission duration

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 3 of 14
Deep Space
This class of missions includes those that require
escaping the Earth-Moon system on a heliocentric
trajectory. In addition to increased delta-v and time of
flight requirements, the lack of abort and contingency
operations represents increased operational risk.
Missions in this category include a Mars Flyby mission
and asteroid rendezvous missions.
Mars System
Missions that require entering the sphere-of-influence
of the Mars system include Mars orbit missions,
rendezvous with one of the Martian moons, and various
Mars surface missions. While some or all of these
missions are likely to be accomplished along the pathway
to Mars, they are the most technically challenging class
of missions and are not considered as potential next steps
in human exploration.
By categorizing proposed missions into possible
options for next steps beyond LEO, and those
intermediate missions that will come between next steps
and the surface of Mars, a consolidated view of missions
on the roadmap to Mars is provided below.
Current Mission Capability: ISS (LEO)
Next Steps: Cis-Lunar Habitat, Asteroid Redirect,
Lunar Surface Sortie, Mars Flyby
Intermediate: Mars Moons, Mars Orbit, Asteroid
Rendezvous, Lunar Surface Extended Stay
Goal: Mars Surface
3. EXPLORATION STRATEGIES
While there is general agreement on the need to
define a roadmap from LEO to the surface of Mars, the
pathway and strategy to traverse that roadmap is where
opinions vary. Without trying to provide a
comprehensive enumeration of theoretically possible
sequenced missions, four strategic pathways begin with
the four different “Next Steps” mission options. A more
complete view of the pathways through various missions
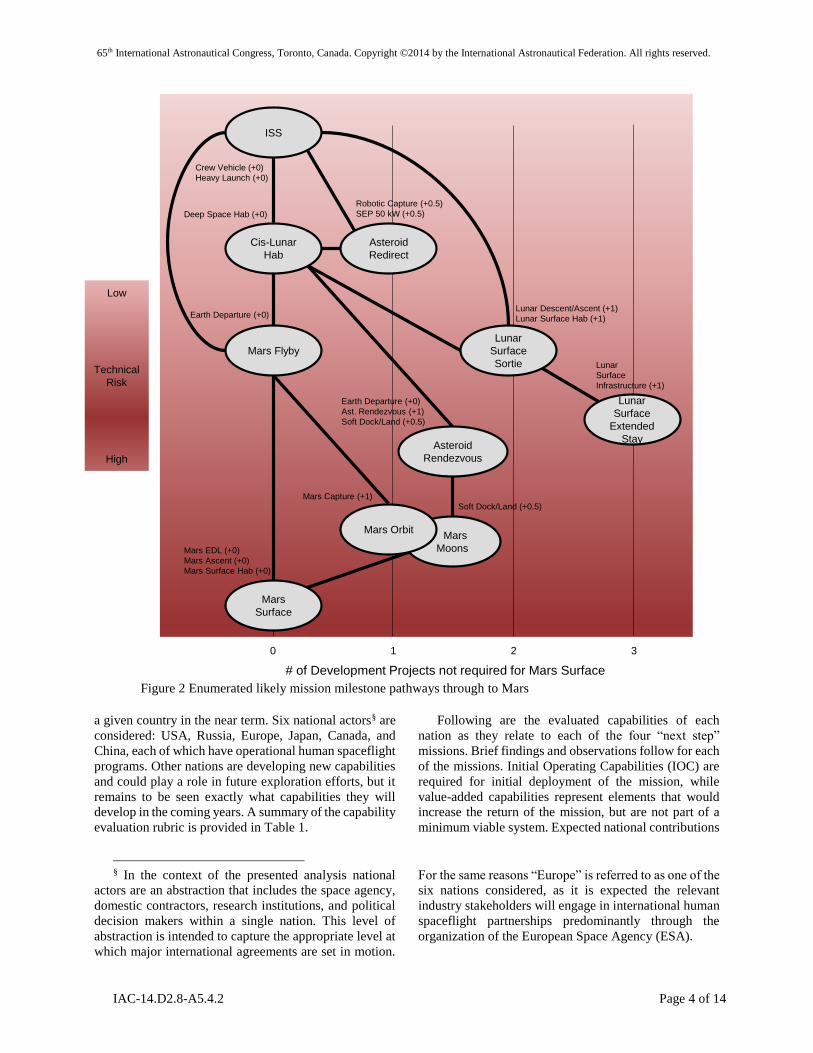
on the way to Mars is provided in Figure 2.
The missions in Figure 2 are organized according to
two criteria. The vertical axis represents missions of
increasing Technical Risk as measured by parameters
such as delta-v, time of flight, and operational hazards. In
the horizontal direction, missions are ordered by the
number of technology developments they require that
will not be used for eventual Mars exploration. Between
missions the incremental unique development projects
required to advance to the next mission are noted. For
example the most direct and incrementally developing set
of missions towards Mars represented are those on the
left side of the figure (ISSCis-Lunar HabitatMars
FlybyMars Surface). Pursuing these missions will
produce new technology elements, all of which are used
in eventual Mars Surface exploration. While an extended
stay on the Lunar surface helps prove out several systems
for Mars, it also requires a number of elements that will
not directly support Mars exploration such as Lunar
descent and ascent capabilities and so is located further
to the right on the figure.
It is important to note that it is not necessarily
“better” to pursue a pathway along the left side of the
figure. Longer pathways to Mars will have more science
return, and technology developments will reduce the risk
of eventual Mars missions. There is a tension between
following a plan with concrete milestones based on a set
Mars transportation architecture, and maintaining the
flexibility to incorporate technological improvements
over time. A good example of this is that Solar Electric
Propulsion (SEP) may not currently be specified as part
of a minimalist architecture to Mars, but pursuing a path
that develops SEP could demonstrate that it enables Mars
architectures superior in performance and cost to
reference designs based on current technology.
Using this view of potential pathways between LEO
and Mars, we can look at the current set of human
missions described by the ISECG Roadmap. The current
GER outlines NASA’s planned asteroid mission, the
general international interest in Lunar surface missions,
and Cis-Lunar activities to develop deep space habitat
capabilities. The GER makes no specific mention of
human missions between Cis-Lunar space and eventual
humans at Mars, although they do mention robotic
precursors and technology demonstrators. It is unclear if
the ISECG believes Lunar Surface missions and a deep-
space habitat will provide sufficient risk reduction for
Mars surface missions, or if they intentionally allow for
uncertainty of mission selection as future technology
challenges become better defined over time. Casting the
current ISECG roadmap onto Figure 2 demonstrates a
significant technical gap between Lunar Surface missions
and Mars surface missions that could be filled by asteroid
rendezvous or Mars orbital missions.
4. SUMMARY OF CAPABILITIES
To move towards evaluating contributions for
international cooperation, a framework is provided to
assess the likelihood of a nation’s contribution to an
exploration program. By reviewing literature and
surveying industry experts two major contributing
factors were assessed: the technology readiness for a
given nation, and the expected political commitment to
that capability. These factors are intended to capture the
industrial know-how and resources committed to
completing development projects. The highest rating
represents a capability that is available, while the lowest
rating represents a capability not likely to be pursued for
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 4 of 14
a given country in the near term. Six national actors§ are
considered: USA, Russia, Europe, Japan, Canada, and
China, each of which have operational human spaceflight
programs. Other nations are developing new capabilities
and could play a role in future exploration efforts, but it
remains to be seen exactly what capabilities they will
develop in the coming years. A summary of the capability
evaluation rubric is provided in Table 1.
§ In the context of the presented analysis national
actors are an abstraction that includes the space agency,
domestic contractors, research institutions, and political
decision makers within a single nation. This level of
abstraction is intended to capture the appropriate level at
which major international agreements are set in motion.
Following are the evaluated capabilities of each
nation as they relate to each of the four “next step”
missions. Brief findings and observations follow for each
of the missions. Initial Operating Capabilities (IOC) are
required for initial deployment of the mission, while
value-added capabilities represent elements that would
increase the return of the mission, but are not part of a
minimum viable system. Expected national contributions
For the same reasons “Europe” is referred to as one of the
six nations considered, as it is expected the relevant
industry stakeholders will engage in international human
spaceflight partnerships predominantly through the
organization of the European Space Agency (ESA).
0 1 2 3
Mars Flyby
Mars
Surface
Lunar
Surface
Extended
Stay
Lunar
Surface
Sortie
Asteroid
Rendezvous
Cis-Lunar
Hab
Asteroid
Redirect
ISS
Mars
Moons
Mars Orbit
Low
Technical
Risk
High
Deep Space Hab (+0)
# of Development Projects not required for Mars Surface
Robotic Capture (+0.5)
SEP 50 kW (+0.5)
Lunar Descent/Ascent (+1)
Lunar Surface Hab (+1)
Lunar
Surface
Infrastructure (+1)
Earth Departure (+0)
Ast. Rendezvous (+1)
Soft Dock/Land (+0.5)
Earth Departure (+0)
Mars Capture (+1)
Soft Dock/Land (+0.5)
Mars EDL (+0)
Mars Ascent (+0)
Mars Surface Hab (+0)
Crew Vehicle (+0)
Heavy Launch (+0)
Figure 2 Enumerated likely mission milestone pathways through to Mars

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 5 of 14
and the rationale for the mission are included after the
breakdown of capabilities.
Cis-Lunar Habitat
Multiple concepts for a human-tended facility in the
Lunar vicinity have been proposed for missions ranging
in duration from several days to year-long profiles [2],
[3]. The concept of the facility would most likely
maintain a semi-autonomous predeployed habitat that has
periodic crew visits (unlike the constant human presence
on the ISS). A typical reference mission used has a crew
of four for a 30 day stay; however, the capability of the
facility could be scaled down or up as necessary due to
program cost and schedule constraints. The concept for
the facility would be to develop and prove out advanced
life support systems for eventual long duration missions,
while operating in a location that supports other activities
such as telerobotic Lunar exploration and allows for
quick return in abort scenarios.
Likely contributions for a cis-Lunar habitat include
crew transportation systems from the USA and Russia.
Logistics capabilities (delivery of propellant, cargo, and
consumables) are available from USA, Russia, Europe,
Japan, and China; however, the increased requirements
on in-space transportation will require new in-space
propulsion developments to deliver crew and cargo to the
cis-Lunar habitat. The most significant opportunity for
new technology development is in advancing the state of
Rating TRL Range Readiness Description Expected Commitment
● 8-9 Flight ReadinessAchieved capability,
resources already spent
6-7 Subsystem IntegrationLikely capability,
significant resources committed
4-5Concept Validation and
Component Development
Early developments, some resources
committed or strong strategic interest
○ 0-3 Concept DevelopmentUnlikely without increased resources
and changed priorities
Table 1 Capability evaluation rubric
USA Russia Europe Japan Canada China
Crew vehicle 11+ km/s re-entry ○ ○ ○ ○
Crew-rated launch ● ○ ○ ●
50-70 mt launch ○ ○ ○
Crew vehicle service module ● ○ ●
Large in-space propulsion (EDS) ○
Automated rendezvous & docking ● ● ● ●
Pressurized hab & cargo ● ● ● ● ○ ●
Advanced ECLSS ○ ○ ○
Advanced radiation protection ○ ○ ○
Human lunar landing ○ ○ ○
Robotic lunar landing ○ ○ ●
SEP 400 kW class ○ ○ ○ ○
Cryo storage & handling ○
Artificial gravity facility ○ ○ ○ ○ ○
In-space robotic manipulation ○ ○ ● ●
Planetary surface robotics ● ●
Onboard science utilization ● ● ● ● ○
Airlock/EVA ● ● ○ ○ ○ ●
Value-Added Capabilities
Initial Operating Capabilities
Table 2 Cis-Lunar Habitat Capabilities by Actor
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 6 of 14
ECLSS (environmental control and life support systems)
and advanced radiation protection techniques. Advanced
ECLSS with increased autonomy and system closure is
in early development stages in USA, Russia, and Europe.
Developing these systems will be a critical-path item on
the way to Mars. Given the early stage of readiness, it is
possible that subsystem-level coordination could be
pursued for an advanced habitation element. Due to the
cis-Lunar habitat’s flexibility in operation, there are more
opportunities for value-added activities from
international contributors for the cis-Lunar habitat than
any other next step mission. It is worth noting that half of
the surveyed experts believed the cis-Lunar habitat
should be the next mission pursued after the ISS.
The cis-Lunar habitat aligns well with the goals of
multiple agencies, as it directly provides access or
develops capability towards other future missions
including both the Lunar surface and Mars missions. The
cis-Lunar habitat also provides the most direct extension
of both technology and organizational elements of ISS of
all the proposed missions. One of the greatest challenges
to developing the cis-Lunar habitat is communicating the
benefits that lie in engineering development, as opposed
to the exploration of a tangible rocky destination. In
particular, while the cis-Lunar habitat may satisfy
incremental developments towards national space
exploration objectives, no current national space policy
highlights this engineering development milestone as
desirable to pursue on its own merits.
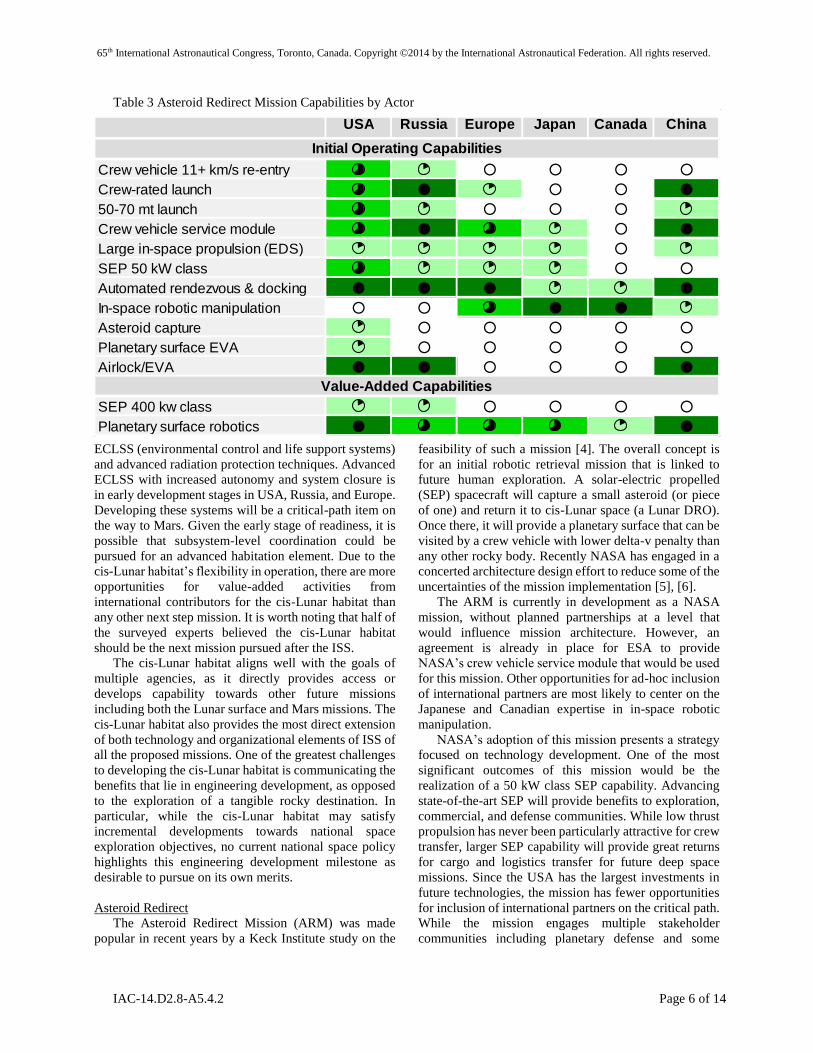
Asteroid Redirect
The Asteroid Redirect Mission (ARM) was made
popular in recent years by a Keck Institute study on the
feasibility of such a mission [4]. The overall concept is
for an initial robotic retrieval mission that is linked to
future human exploration. A solar-electric propelled
(SEP) spacecraft will capture a small asteroid (or piece
of one) and return it to cis-Lunar space (a Lunar DRO).
Once there, it will provide a planetary surface that can be
visited by a crew vehicle with lower delta-v penalty than
any other rocky body. Recently NASA has engaged in a
concerted architecture design effort to reduce some of the
uncertainties of the mission implementation [5], [6].
The ARM is currently in development as a NASA
mission, without planned partnerships at a level that
would influence mission architecture. However, an
agreement is already in place for ESA to provide
NASA’s crew vehicle service module that would be used
for this mission. Other opportunities for ad-hoc inclusion
of international partners are most likely to center on the
Japanese and Canadian expertise in in-space robotic
manipulation.
NASA’s adoption of this mission presents a strategy
focused on technology development. One of the most
significant outcomes of this mission would be the
realization of a 50 kW class SEP capability. Advancing
state-of-the-art SEP will provide benefits to exploration,
commercial, and defense communities. While low thrust
propulsion has never been particularly attractive for crew
transfer, larger SEP capability will provide great returns
for cargo and logistics transfer for future deep space
missions. Since the USA has the largest investments in
future technologies, the mission has fewer opportunities
for inclusion of international partners on the critical path.
While the mission engages multiple stakeholder
communities including planetary defense and some
USA Russia Europe Japan Canada China
Crew vehicle 11+ km/s re-entry ○ ○ ○ ○
Crew-rated launch ● ○ ○ ●
50-70 mt launch ○ ○ ○
Crew vehicle service module ● ○ ●
Large in-space propulsion (EDS) ○
SEP 50 kW class ○ ○
Automated rendezvous & docking ● ● ● ●
In-space robotic manipulation ○ ○ ● ●
Asteroid capture ○ ○ ○ ○ ○
Planetary surface EVA ○ ○ ○ ○ ○
Airlock/EVA ● ● ○ ○ ○ ●
SEP 400 kw class ○ ○ ○ ○
Planetary surface robotics ● ●
Value-Added Capabilities
Initial Operating Capabilities
Table 3 Asteroid Redirect Mission Capabilities by Actor
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 7 of 14
planetary scientists, there has been little stated interest
from policy makers from other human spaceflight
nations. Participants of the industry survey did not see
many opportunities for international participation in the
mission and were more supportive of asteroid redirect as
an added capability to a pre-existing Cis-Lunar Habitat.
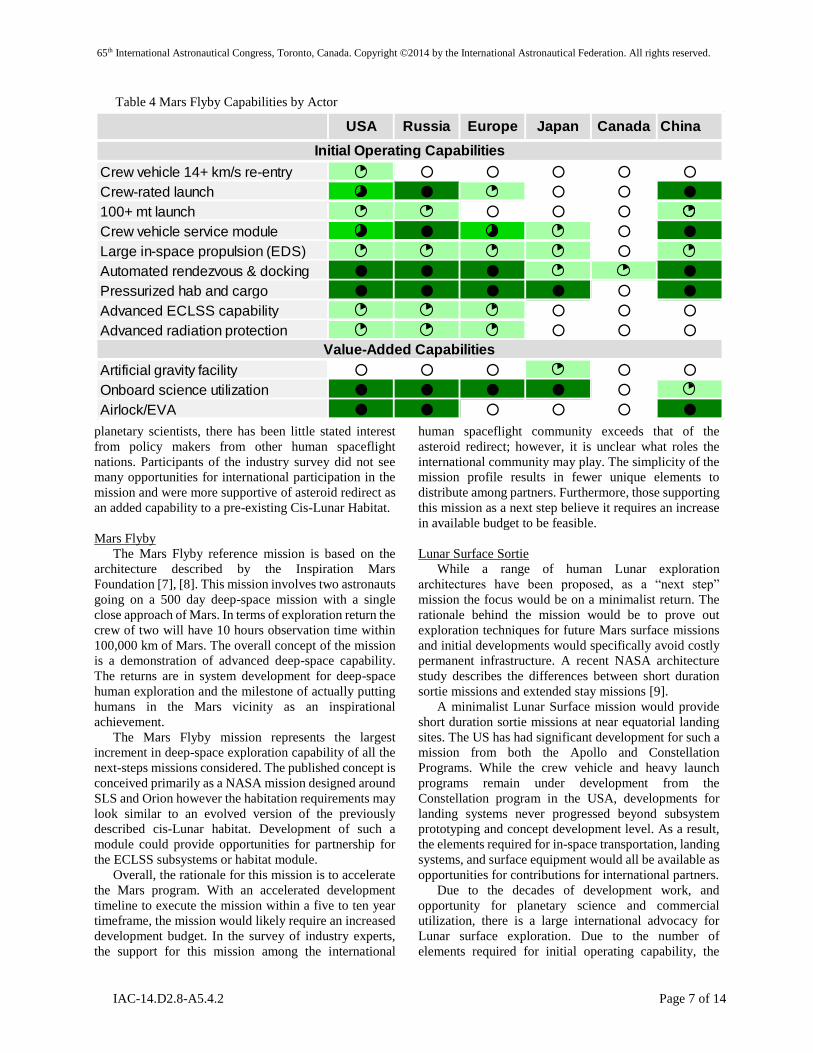
Mars Flyby
The Mars Flyby reference mission is based on the
architecture described by the Inspiration Mars
Foundation [7], [8]. This mission involves two astronauts
going on a 500 day deep-space mission with a single
close approach of Mars. In terms of exploration return the
crew of two will have 10 hours observation time within
100,000 km of Mars. The overall concept of the mission
is a demonstration of advanced deep-space capability.
The returns are in system development for deep-space
human exploration and the milestone of actually putting
humans in the Mars vicinity as an inspirational
achievement.
The Mars Flyby mission represents the largest
increment in deep-space exploration capability of all the
next-steps missions considered. The published concept is
conceived primarily as a NASA mission designed around
SLS and Orion however the habitation requirements may
look similar to an evolved version of the previously
described cis-Lunar habitat. Development of such a
module could provide opportunities for partnership for
the ECLSS subsystems or habitat module.
Overall, the rationale for this mission is to accelerate
the Mars program. With an accelerated development
timeline to execute the mission within a five to ten year
timeframe, the mission would likely require an increased
development budget. In the survey of industry experts,
the support for this mission among the international
human spaceflight community exceeds that of the
asteroid redirect; however, it is unclear what roles the
international community may play. The simplicity of the
mission profile results in fewer unique elements to
distribute among partners. Furthermore, those supporting
this mission as a next step believe it requires an increase
in available budget to be feasible.
Lunar Surface Sortie
While a range of human Lunar exploration
architectures have been proposed, as a “next step”
mission the focus would be on a minimalist return. The
rationale behind the mission would be to prove out
exploration techniques for future Mars surface missions
and initial developments would specifically avoid costly
permanent infrastructure. A recent NASA architecture
study describes the differences between short duration
sortie missions and extended stay missions [9].
A minimalist Lunar Surface mission would provide
short duration sortie missions at near equatorial landing
sites. The US has had significant development for such a
mission from both the Apollo and Constellation
Programs. While the crew vehicle and heavy launch
programs remain under development from the
Constellation program in the USA, developments for
landing systems never progressed beyond subsystem
prototyping and concept development level. As a result,
the elements required for in-space transportation, landing
systems, and surface equipment would all be available as
opportunities for contributions for international partners.
Due to the decades of development work, and
opportunity for planetary science and commercial
utilization, there is a large international advocacy for
Lunar surface exploration. Due to the number of
elements required for initial operating capability, the
USA Russia Europe Japan Canada China
Crew vehicle 14+ km/s re-entry ○ ○ ○ ○ ○
Crew-rated launch ● ○ ○ ●
100+ mt launch ○ ○ ○
Crew vehicle service module ● ○ ●
Large in-space propulsion (EDS) ○
Automated rendezvous & docking ● ● ● ●
Pressurized hab and cargo ● ● ● ● ○ ●
Advanced ECLSS capability ○ ○ ○
Advanced radiation protection ○ ○ ○
Artificial gravity facility ○ ○ ○ ○ ○
Onboard science utilization ● ● ● ● ○
Airlock/EVA ● ● ○ ○ ○ ●
Value-Added Capabilities
Initial Operating Capabilities
Table 4 Mars Flyby Capabilities by Actor
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 8 of 14
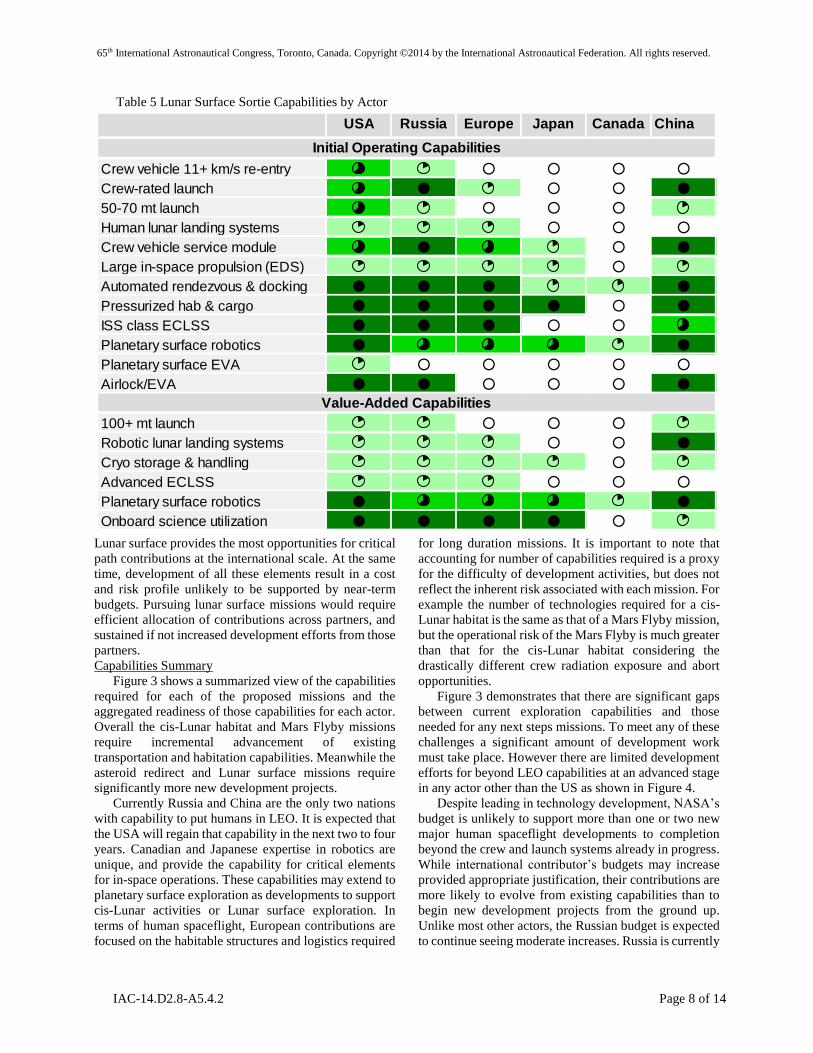
Lunar surface provides the most opportunities for critical
path contributions at the international scale. At the same
time, development of all these elements result in a cost
and risk profile unlikely to be supported by near-term
budgets. Pursuing lunar surface missions would require
efficient allocation of contributions across partners, and
sustained if not increased development efforts from those
partners.
Capabilities Summary
Figure 3 shows a summarized view of the capabilities
required for each of the proposed missions and the
aggregated readiness of those capabilities for each actor.
Overall the cis-Lunar habitat and Mars Flyby missions
require incremental advancement of existing
transportation and habitation capabilities. Meanwhile the
asteroid redirect and Lunar surface missions require
significantly more new development projects.
Currently Russia and China are the only two nations
with capability to put humans in LEO. It is expected that
the USA will regain that capability in the next two to four
years. Canadian and Japanese expertise in robotics are
unique, and provide the capability for critical elements
for in-space operations. These capabilities may extend to
planetary surface exploration as developments to support
cis-Lunar activities or Lunar surface exploration. In
terms of human spaceflight, European contributions are
focused on the habitable structures and logistics required
for long duration missions. It is important to note that
accounting for number of capabilities required is a proxy
for the difficulty of development activities, but does not
reflect the inherent risk associated with each mission. For
example the number of technologies required for a cis-
Lunar habitat is the same as that of a Mars Flyby mission,
but the operational risk of the Mars Flyby is much greater
than that for the cis-Lunar habitat considering the
drastically different crew radiation exposure and abort
opportunities.
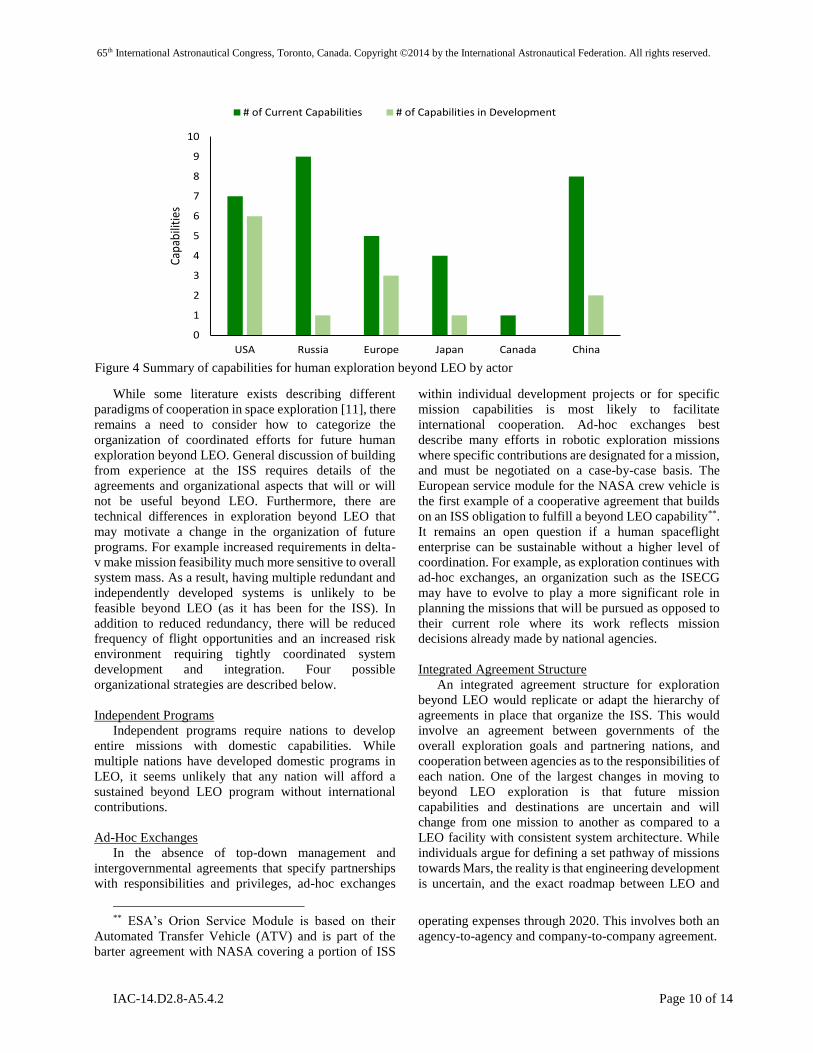
Figure 3 demonstrates that there are significant gaps
between current exploration capabilities and those
needed for any next steps missions. To meet any of these
challenges a significant amount of development work
must take place. However there are limited development
efforts for beyond LEO capabilities at an advanced stage
in any actor other than the US as shown in Figure 4.
Despite leading in technology development, NASA’s
budget is unlikely to support more than one or two new
major human spaceflight developments to completion
beyond the crew and launch systems already in progress.
While international contributor’s budgets may increase
provided appropriate justification, their contributions are
more likely to evolve from existing capabilities than to
begin new development projects from the ground up.
Unlike most other actors, the Russian budget is expected
to continue seeing moderate increases. Russia is currently
USA Russia Europe Japan Canada China
Crew vehicle 11+ km/s re-entry ○ ○ ○ ○
Crew-rated launch ● ○ ○ ●
50-70 mt launch ○ ○ ○
Human lunar landing systems ○ ○ ○
Crew vehicle service module ● ○ ●
Large in-space propulsion (EDS) ○
Automated rendezvous & docking ● ● ● ●
Pressurized hab & cargo ● ● ● ● ○ ●
ISS class ECLSS ● ● ● ○ ○
Planetary surface robotics ● ●
Planetary surface EVA ○ ○ ○ ○ ○
Airlock/EVA ● ● ○ ○ ○ ●
100+ mt launch ○ ○ ○
Robotic lunar landing systems ○ ○ ●
Cryo storage & handling ○
Advanced ECLSS ○ ○ ○
Planetary surface robotics ● ●
Onboard science utilization ● ● ● ● ○
Value-Added Capabilities
Initial Operating Capabilities
Table 5 Lunar Surface Sortie Capabilities by Actor

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 9 of 14
undergoing a national space industry reformation and is
investing heavily in ground infrastructure developments.
As such, it is unclear what development budget will be
available for new technologies for human exploration
beyond LEO.
While still a developing program, Chinese crew and
transportation capabilities could offer crew-access
redundancy and cost sharing in future projects. Large
scale integrated collaboration for human spaceflight
seems unlikely with the Chinese in the near term, as the
Chinese program has an independent strategy for a LEO
space station. However, opportunities for developing
cooperative relationships in space should be pursued in
smaller space missions to develop the working
relationships that will open up more opportunities for
integrated exploration activities. To date, European and
Russian officials have opened discussion of collaborative
efforts with China. While current US policy prevents
NASA from coordinating with the Chinese, exploration
advocates have begun to call for a change to these
policies including specific guidance from the US
National Research Council to consider US collaboration
with China [10].
A sustained and robust beyond LEO human
exploration program requires several large technology
development projects that no single nation can develop
in a reasonable timeframe. While Russia and China have
independent human spaceflight capability, it is unclear
that either program is committing significant resources to
develop capabilities for beyond LEO exploration.
Meanwhile the US program is investing in future projects
but has yet to complete any capabilities that operate
beyond LEO. A successful beyond LEO program
requires some amount of cooperation between these
independent human spaceflight programs.
5. ORGANIZING COOPERATION
The current organizational structure of the ISS has a
hierarchy of agreements corresponding to coordinated
efforts between governments, space agencies, and
contractors. Overall cooperation agreements between
governments are established through an
Intergovernmental Agreement (IGA) that defines the
overall nature of the partnership. One level down, agency
coordination is executed through a series of memoranda
of understanding (MOU). The MOUs are organized
between NASA as a central entity and the other primary
agencies dictating specific contributions, roles, and
responsibilities. Other agency-level implementation
specifics are coordinated on an ad-hoc basis through
implementing agreements drafted as necessary. At the
element level, development of specific modules and
operations are coordinated through various contracting
mechanisms by each participating agency within its own
country.
The current framework in which ISS partners work
together represents a decade of organizational
development. There is broad agreement that human
exploration beyond LEO should build on the
relationships, experience, and institutions of ISS, but
there remains a significant amount of ambiguity as to
what specific aspects will most benefit future programs.
In addition to extending previous experience, it is likely
that future programs will have to be more flexible to
incorporation of new actors. China is developing
capabilities that may soon intersect with the needs of
other partners beyond LEO, and other countries such as
India, have stated their intent to pursue independent
human spaceflight capability. Furthermore, several
private companies have stated intentions to participate in
future exploration efforts that could add a layer of
complexity in new partnerships between state-run and
private programs.
0
2
4
6
8
10
12
ISS Cis Lunar Habitat ARM Mars Flyby Lunar Sortie
AggregateReadinessby Actor
USA Russia Europe Japan Canada China # of Required Mission Capabilities
Figure 3 Summary of capabilities for each mission by nation
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 10 of 14
While some literature exists describing different
paradigms of cooperation in space exploration [11], there
remains a need to consider how to categorize the
organization of coordinated efforts for future human
exploration beyond LEO. General discussion of building
from experience at the ISS requires details of the
agreements and organizational aspects that will or will
not be useful beyond LEO. Furthermore, there are
technical differences in exploration beyond LEO that
may motivate a change in the organization of future
programs. For example increased requirements in delta-
v make mission feasibility much more sensitive to overall
system mass. As a result, having multiple redundant and
independently developed systems is unlikely to be
feasible beyond LEO (as it has been for the ISS). In
addition to reduced redundancy, there will be reduced
frequency of flight opportunities and an increased risk
environment requiring tightly coordinated system
development and integration. Four possible
organizational strategies are described below.
Independent Programs
Independent programs require nations to develop
entire missions with domestic capabilities. While
multiple nations have developed domestic programs in
LEO, it seems unlikely that any nation will afford a
sustained beyond LEO program without international
contributions.
Ad-Hoc Exchanges
In the absence of top-down management and
intergovernmental agreements that specify partnerships
with responsibilities and privileges, ad-hoc exchanges
** ESA’s Orion Service Module is based on their
Automated Transfer Vehicle (ATV) and is part of the
barter agreement with NASA covering a portion of ISS
within individual development projects or for specific
mission capabilities is most likely to facilitate
international cooperation. Ad-hoc exchanges best
describe many efforts in robotic exploration missions
where specific contributions are designated for a mission,
and must be negotiated on a case-by-case basis. The
European service module for the NASA crew vehicle is
the first example of a cooperative agreement that builds
on an ISS obligation to fulfill a beyond LEO capability**.
It remains an open question if a human spaceflight
enterprise can be sustainable without a higher level of
coordination. For example, as exploration continues with
ad-hoc exchanges, an organization such as the ISECG
may have to evolve to play a more significant role in
planning the missions that will be pursued as opposed to
their current role where its work reflects mission
decisions already made by national agencies.
Integrated Agreement Structure
An integrated agreement structure for exploration
beyond LEO would replicate or adapt the hierarchy of
agreements in place that organize the ISS. This would
involve an agreement between governments of the
overall exploration goals and partnering nations, and
cooperation between agencies as to the responsibilities of
each nation. One of the largest changes in moving to
beyond LEO exploration is that future mission
capabilities and destinations are uncertain and will
change from one mission to another as compared to a
LEO facility with consistent system architecture. While
individuals argue for defining a set pathway of missions
towards Mars, the reality is that engineering development
is uncertain, and the exact roadmap between LEO and
operating expenses through 2020. This involves both an
agency-to-agency and company-to-company agreement.
0
1
2
3
4
5
6
7
8
9
10
USA Russia Europe Japan Canada China
Capa
bilit
ies
# of Current Capabilities # of Capabilities in Development
Figure 4 Summary of capabilities for human exploration beyond LEO by actor

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 11 of 14
Mars can not be established with certainty. An integrated
framework for cooperation beyond LEO requires a
mechanism to adapt planned contributions as milestones
are met and capability needs evolve.
Multinational Entity
Just as ESA coordinates space efforts from across
Europe, a multinational intergovernmental entity could
collect resources to implement the global human space
exploration enterprise. This level of integration and loss
of autonomy for national agencies is unlikely to occur as
the decision to commit to exploration budgets is a
national process tied to many domestic concerns. At the
national level decision makers are unlikely to give up the
ability to control their space budget because they have
rationales that may not align with those of a multinational
entity. ESA has addressed this problem by having some
mandatory contributions and separate elective programs
in which nations can choose to participate††.
6. SCENARIOS
Scenarios that dictate what may be accomplished in
the next steps of human exploration beyond LEO are
driven by two factors: resource commitment and the
cooperative environment of human spaceflight.
Following are some of the factors that will result in a low
or high level of resource commitment, and a low or high
level of cooperation on beyond LEO exploration.
The most likely scenario is that major national human
spaceflight budgets remain fairly flat. If budget increases
are lower than inflation, there is a consistent loss of
purchasing power over time. Even when interest in
government spending on space is high, it is difficult to
justify the long-term uncertain returns of human
spaceflight developments as compared to the concrete
benefits of ground infrastructure improvements and
programs with more commercial interest relating to
navigation, earth observation, and telecommunications
services. For example while Russia has committed to a
multi-year increase in overall space spending, it remains
to be seen what specific developments will be supported
for human spaceflight beyond LEO. A more optimistic
scenario would see government spending increase as part
of a commitment to a robust human exploration program.
Alternatively, resources could become available from
private-sector entities that decide to start spending
significant resources on human exploration beyond LEO.
The current cooperative environment for space is
dynamic and uncertain in the future. Development and
operation of the ISS has succeeded in part due to the
ability of participating agencies to work together. Despite
recent geopolitical tension outside of the space industry,
†† Note that projects within ESA might be better
categorized as “ad-hoc exchanges” or “integrated
agreement structure.” These categories provide a way of
all currently operating projects in space science and
human exploration continue, seemingly unaffected by
these external factors. However individual politicians
have made statements indicating space cooperation could
be limited in the future. While no operating cooperative
agreements have been hindered, at a practical level this
political tension may make it more difficult to engage in
the early discussions and planning required to create
proposals for future cooperative efforts. Aside from the
geopolitical issues, cooperation could be limited by
differing goals. While all agencies have agreed on Mars
as the eventual goal, China and Russia have both clearly
stated they intend to pursue Lunar surface exploration
first. Meanwhile the USA has pursued an asteroid-
centered exploration strategy on the way to Mars. The
third issue that could make cooperation difficult, is the
desire for nations to maintain fully independent-
operating exploration capabilities. In the case of the ISS,
having independent crew systems allowed for a design
with redundancy. However for more technically
challenging missions beyond LEO, it may prove cost
prohibitive for two nations to provide independent
transportation and habitation capabilities.
Four scenarios are described as a set of possible
outcomes dictated by the levels of resources committed
and the cooperative environment.
Scenario A: Low Resources, Low Cooperation
The current stated plans of the USA, Russia, and
China reflect a reality of limited cooperation and flat or
modestly increasing budgets. The USA is pursuing the
asteroid redirect mission. While ARM is still being
formulated, international partners have not yet been
engaged in early rounds of goal setting and mission
architecture design. If development is delayed too long
or suitable targets are not identified, the USA will have
to resort to flying short duration Orion missions with
little opportunity to practice astronaut-conducted science
operations. Russia and China will continue to slowly
develop their independent efforts towards Lunar surface
exploration. Europe, Canada, and Japan will continue to
contribute niche elements to other human spaceflight
programs, however if milestones are not met or astronaut
flight opportunities are not available in return, they may
lose political support and redirect their human
exploration budget to endeavours with more quantifiable
return on investment.
Scenario B: Low Resources, High Cooperation
With modest resources available, human spaceflight
programs will seek to build off the developments of ISS.
In a highly cooperative environment, the USA, Russia,
thinking how nations may collaborate but are not
necessarily strictly implemented within a single category.

65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 12 of 14
Europe, and China could all contribute to development of
a cis-Lunar habitat facility. Pursuing this platform does
not have to be mutually exclusive from the USA pursuing
the ARM on its own; it would depend on the available
budget and the specific role outlined for the USA in the
habitat project. If both ARM and a cis-Lunar habitat are
planned to be operational at the same time, they can be
designed to be mutually beneficial. A redirected asteroid
would provide a location for astronauts to practice new
EVA techniques, with the opportunity to develop
operations over longer duration missions coming from
the cis-Lunar habitat. Meanwhile it is possible that the
ARM’s SEP spacecraft bus including power, propulsion,
and thermal subsystems could in fact support the cis-
Lunar habitat as primary or backup modules in future
operations. To enable this vision of integrating the ARM
and cis-Lunar habitat, planning would need to occur in
the near future, before the system architecture of ARM is
defined.
Scenario C: High Resources, Low Cooperation
With a drastically increased budget, the USA can
pursue ARM while developing a large upper stage for
SLS and possibly a deep-space habitat. The date of initial
operating capability would be sensitive to the size of the
budget increase and corresponding schedule
advancement. Meanwhile China and Russia will commit
large resources to the lunar surface and these programs
will develop with little ability to interact or interface.
Europe, Japan, and Canada may provide elements to the
other three programs in exchange for astronaut time and
scientific equipment utilization.
Scenario D: High Resources, High Cooperation
In the case where funds are available and multiple
nations are contributing to a coordinated program, more
ambitious missions are possible. With multiple nations
committing to develop new technology elements, it may
become worthwhile to pursue a coordinated effort to the
Lunar surface so that commercial and scientific interests
can reap benefits while later on engineering development
continues on deep-space habitation and transportation.
This scenario can only be realized if nations commit to
providing costly development projects that are
interdependent on each other on a strict schedule.
7. SUMMARY AND CONCLUSIONS
The ISECG activity provides a valuable arena for
developing common understanding of future exploration
initiatives. The GER includes expected missions from
national efforts and a set of milestones that may be
accomplished with international support, but stops short
of suggesting how these milestones will be achieved. To
benefit from international cooperation, nations seek to be
responsible for elements that are in the critical path and
are integral to the success of a sustained program with
frequent highly visible milestones. Coordinating those
international efforts requires concerted and authoritative
planning activities at the international level.
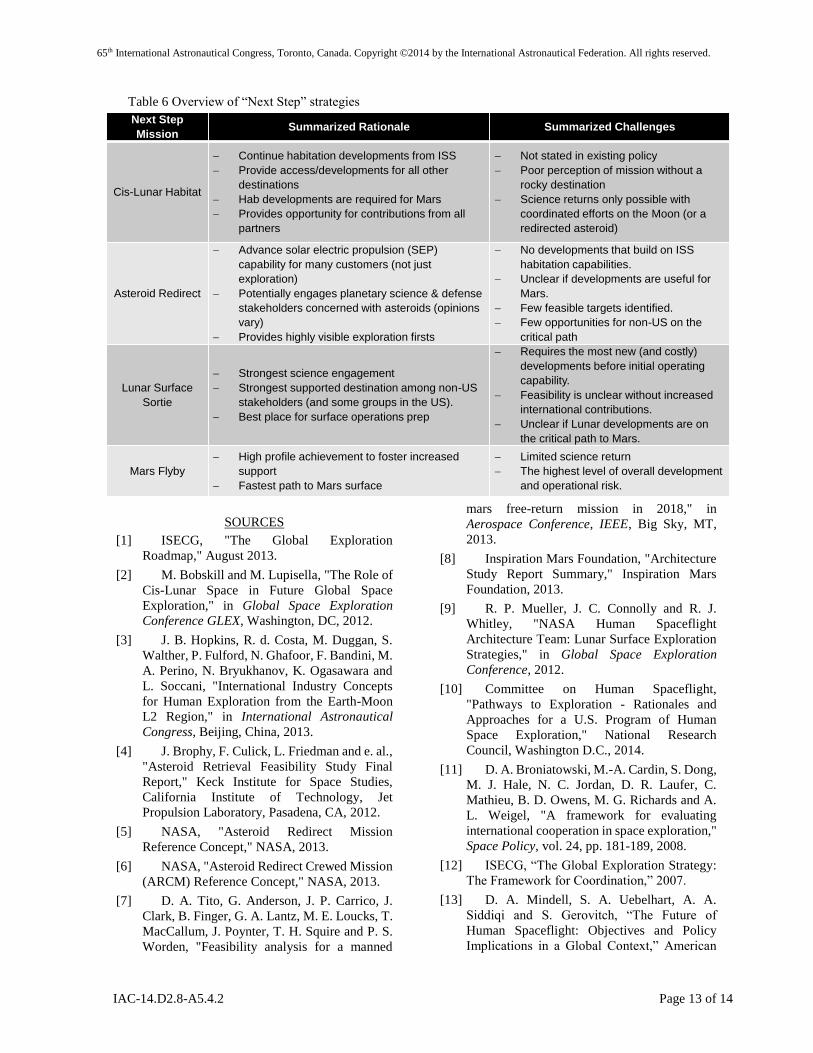
There are four realistic proposals for initial human
exploration beyond LEO: a cis-Lunar habitat, asteroid
redirect, Mars flyby, and a Lunar surface sortie.
Summarized rationales and challenges of each mission
are provided in Table 6.
The contributions of new development projects from
each participating nation will be limited and sensitive to
future budget allocation. While the USA currently has the
largest portfolio of investments for beyond LEO
capabilities, it is unable to afford development of all
capabilities required. Planning now can help increase the
cost sharing for future integrated exploration efforts.
Given the early stage of readiness, it is possible that
subsystem-level coordination could be pursued for an
advanced habitation element. Other technologies are
either niche (robotics) or have national-interest
sensitivities (in-space propulsion) that make them less
desirable for subsystem-level coordination. General LEO
transportation logistics and habitation functions are
shared by many actors and allow for exchange of services
and utilization of exploration assets if designed into the
critical path.
In the absence of top-down management and an IGA
that specifies partnerships with responsibilities and
privileges, ad-hoc exchanges within individual
development projects or for specific mission capabilities
is most likely to facilitate international cooperation in the
coming years. In particular future exploration institutions
should be flexible to adapt contributions depending on
what is learned from early missions to prove out deep
space systems. Furthermore future programs will benefit
from having the flexibility to incorporate new state and
private actors.
It is unlikely that development for human exploration
beyond LEO will receive drastically increased resources
in the near future. Given the modest development budget
available globally, nations must plan now for closely
integrated mutually beneficial projects. If the USA
pursues the ARM, mission planners must coordinate with
potential partners so that the spacecraft development
provides value as part of an ongoing program to develop
deep space capabilities.
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 13 of 14
SOURCES
[1] ISECG, "The Global Exploration
Roadmap," August 2013.
[2] M. Bobskill and M. Lupisella, "The Role of
Cis-Lunar Space in Future Global Space
Exploration," in Global Space Exploration
Conference GLEX, Washington, DC, 2012.
[3] J. B. Hopkins, R. d. Costa, M. Duggan, S.
Walther, P. Fulford, N. Ghafoor, F. Bandini, M.
A. Perino, N. Bryukhanov, K. Ogasawara and
L. Soccani, "International Industry Concepts
for Human Exploration from the Earth-Moon
L2 Region," in International Astronautical
Congress, Beijing, China, 2013.
[4] J. Brophy, F. Culick, L. Friedman and e. al.,
"Asteroid Retrieval Feasibility Study Final
Report," Keck Institute for Space Studies,
California Institute of Technology, Jet
Propulsion Laboratory, Pasadena, CA, 2012.
[5] NASA, "Asteroid Redirect Mission
Reference Concept," NASA, 2013.
[6] NASA, "Asteroid Redirect Crewed Mission
(ARCM) Reference Concept," NASA, 2013.
[7] D. A. Tito, G. Anderson, J. P. Carrico, J.
Clark, B. Finger, G. A. Lantz, M. E. Loucks, T.
MacCallum, J. Poynter, T. H. Squire and P. S.
Worden, "Feasibility analysis for a manned
mars free-return mission in 2018," in
Aerospace Conference, IEEE, Big Sky, MT,
2013.
[8] Inspiration Mars Foundation, "Architecture
Study Report Summary," Inspiration Mars
Foundation, 2013.
[9] R. P. Mueller, J. C. Connolly and R. J.
Whitley, "NASA Human Spaceflight
Architecture Team: Lunar Surface Exploration
Strategies," in Global Space Exploration
Conference, 2012.
[10] Committee on Human Spaceflight,
"Pathways to Exploration - Rationales and
Approaches for a U.S. Program of Human
Space Exploration," National Research
Council, Washington D.C., 2014.
[11] D. A. Broniatowski, M.-A. Cardin, S. Dong,
M. J. Hale, N. C. Jordan, D. R. Laufer, C.
Mathieu, B. D. Owens, M. G. Richards and A.
L. Weigel, "A framework for evaluating
international cooperation in space exploration,"
Space Policy, vol. 24, pp. 181-189, 2008.
[12] ISECG, “The Global Exploration Strategy:
The Framework for Coordination,” 2007.
[13] D. A. Mindell, S. A. Uebelhart, A. A.
Siddiqi and S. Gerovitch, “The Future of
Human Spaceflight: Objectives and Policy
Implications in a Global Context,” American
Table 6 Overview of “Next Step” strategies
Next Step
MissionSummarized Rationale Summarized Challenges
Cis-Lunar Habitat
Continue habitation developments from ISS
Provide access/developments for all other
destinations
Hab developments are required for Mars
Provides opportunity for contributions from all
partners
Not stated in existing policy
Poor perception of mission without a
rocky destination
Science returns only possible with
coordinated efforts on the Moon (or a
redirected asteroid)
Asteroid Redirect
Advance solar electric propulsion (SEP)
capability for many customers (not just
exploration)
Potentially engages planetary science & defense
stakeholders concerned with asteroids (opinions
vary)
Provides highly visible exploration firsts
No developments that build on ISS
habitation capabilities.
Unclear if developments are useful for
Mars.
Few feasible targets identified.
Few opportunities for non-US on the
critical path
Lunar Surface
Sortie
Strongest science engagement
Strongest supported destination among non-US
stakeholders (and some groups in the US).
Best place for surface operations prep
Requires the most new (and costly)
developments before initial operating
capability.
Feasibility is unclear without increased
international contributions.
Unclear if Lunar developments are on
the critical path to Mars.
Mars Flyby
High profile achievement to foster increased
support
Fastest path to Mars surface
Limited science return
The highest level of overall development
and operational risk.
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by the International Astronautical Federation. All rights reserved.
IAC-14.D2.8-A5.4.2 Page 14 of 14
Academy of Arts & Sciences, Cambridge, MA,
2009.
[14] Review of U.S. Human Spaceflight Plans
Committee, “Seeking a Human Spaceflight
Program Worthy of a Great Nation,”
Washington, DC, 2009.
[15] B. Obama, “National Space Policy of the
United States of America,” Office of the
President of the United States of America,
Washington, DC, 2010.
[16] Committee on NASA's Strategic Direction,
National Research Council, “NASA's Strategic
Direction and the Need for a National
Consensus,” The National Academies Press,
Washington, DC, 2012.
[17] Roscosmos, "Principles of State Policy of
the Russian Federation in the field of space
activities for the period up to 2030 and
beyond," 2013.
[18] ESA, "Resolution on the European Space
Policy," 2007.

























![The DRIFT experiment: Recent results from the DRIFT-IId detector James Battat Wellesley College [for the DRIFT collaboration] CYGNUS 2015 @ Oxy 2015 June](https://img.dokumen.tips/doc/110x75/56649e7f5503460f94b84211/the-drift-experiment-recent-results-from-the-drift-iid-detector-james-battat.jpg)



