Embed Size (px)
Citation preview

NASA-CR-192993
_J0
m
r,_c_
11
NR
S
r_
m
m,1
m
/N
_0
om
e_ml
r_
r_
(NASA-CR-I92993) THE
CQNTROLLEO STRUCTURES
SYMPOSIUM (MIT) 251
3RD ANNUAL
TECHNOLOGY
P
N93-28107
--THRU--
N93-28[76
Unclas
G3/39 0160322
https://ntrs.nasa.gov/search.jsp?R=19930018978 2020-03-24T06:08:25+00:00Z

8:00
8:30
9:00
9:30
I0:00
10:15
10:45
11:15
11:45
1:00
2:00
2:30
3:00
3:15
3:45
4:15
4:45
MIT
spaceEngineeringP_earchCenter
Controlled Structures TechnologyM.I.T. Space Engineering Research Center
3rd Annual Symposium
July 1, 1991 - 8:00 am to 5:00 pm
Location: Building 9. Rm. 150Massachusetts Institute of Technology
Cambridge, MA 02139
Registration
Welcome and Introduction
Optical Interferometer Testbed -
Active Impedance Matching of ComplexStructural Systems
Break
Narrow and Broad Band Isolation for _ ....Uncertain Dynamic Systems
Application of CST to Adaptive Optics
Middeck 0-G Dynamics Experiment (MODE)
Lunch
LABORATORY TOUR (MEET IN 37-372)
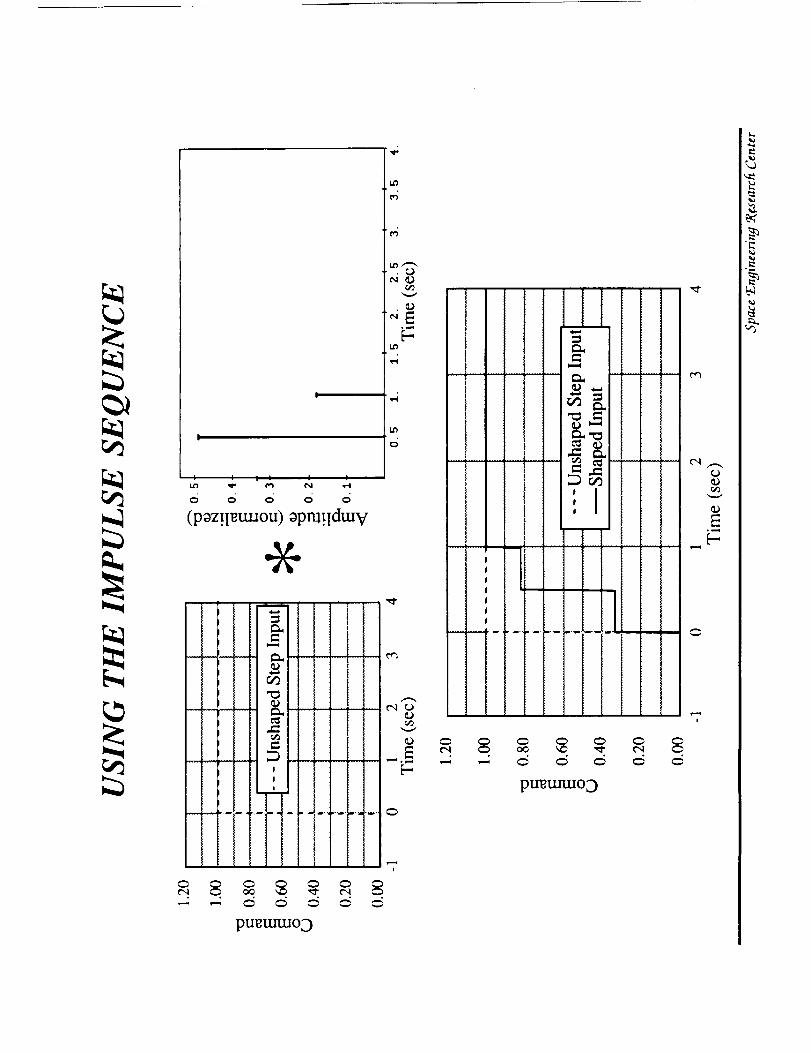
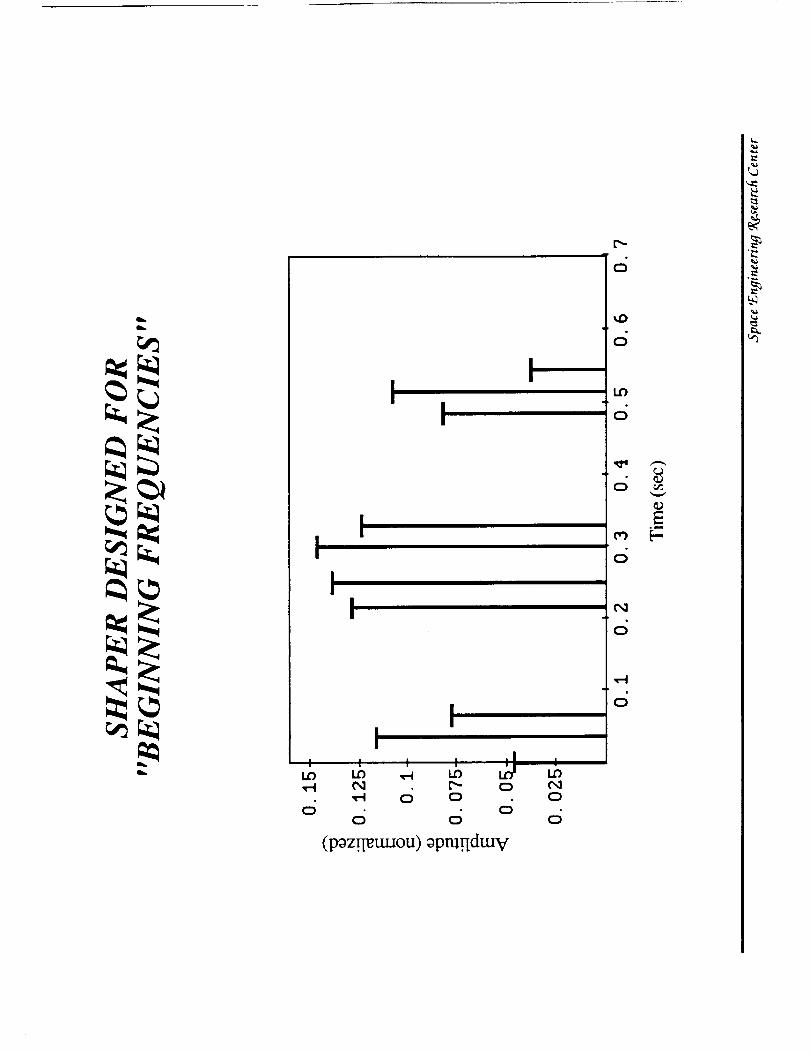
Shaping System Commands to ReduceResidual Vibration
Middeck Active Control Experiment (MACE)
Break
Robust Control for Uncertain Structures
Cost Averaging Techniques for RobustStructural Control
Intelligent Structures Technology
Conclusion
E. Crawley
G. Blackwood '-/
D. MacMartin 4
A. von Flotow O_,_
E. Anderson - :'
M. van Schoor-_
j Jj_,
W. Seering /t, ..,' 2,_. =_2'_'
D. Miller - "
M. Athans -
N, Hagood -
E. Crawley --. ":_

• _.-,Io,--I
_ _°
) _) _ ..__i . _,_
_J
|'_
@

°-

m
o • • •
©
L.4
o_

A Space-Based Interferometer
• used for astrometry:
- measure baseline and delay lines using
metrology system
• used for imaging
- measure intensity (mag) and phase (via
delay line distance) of central fringe of
interference pattern
- vary baseline and rotate siderostats aboutLOS to target star by rigid body motion
- reconstruct image from 2-D spatial IFT ofthe measured intensity
Light from guide starLight from target
\
\
\
\
-- F_'n ge-'d ete cto r
\
L
variable delay line
J
MIT Space Engineering P_search Center


0
O
0
0
0
×
0

_ °
0 • • • • _ • • •
r.D
2X
t4

0

* °m Lp=q ,_=
i
A
0)'=_
io_uoo aoj soan_n_
I ]
saam, anaa,_ ao3 Ioaa,uoD

_

i
_ 0
O0
• ;1
__o_ _ _ _, _ _

0
0
"0
dd_dddddo_0 0 0 0 0 0 0



_ "_ o
"_

iL
n.lmmqidmm--_
mmmm
m
mwmm
mm--
mnm_
p_mmi
c_
mmmm__ Eu _-mmm_um_ _j_ Ir_
mmm_ _j _J
mmm_
J_
_j
eu
o_


I
J

Open Loop Transfer Function ofMirror
• mirror actuated in piston (z) direction only
Piston & Y on Table mar9102 ....
mirror mounted on rigid base
i i i i
.._ 101o :7:>
_- 100
o
_ 10-,_t,:,., .---,. ,,ii " "_I I l_f ,i II i I ¢ _*_ ij _' D
10.21 ' ' ' ,' q' _, ': I, , , , , ' 'l0 t 10+
Hz
O>
e-,
o
10 2
10 ]
10 0
lO-t
10-210_
Piston & Y on Plate C marl 1
mirror mounted at truss vertex
(plate C)
I I +lit 11 ii I I I I I, ,., .,:, ,,,+ ;,+ ,, .,* ._ i 11 II • iit h_ i I i , I i + i i , ,
tO2
Hz
lOs
-- 10_0
= 1002
10-1
10-2101
mirror mounted on truss beam
(plate A)Piston on Plate A marl1
-£
+111 l II i t I_ #"
"--" ......" 1 il/ ":",.:..: 1_ i il i_ iIIIIi _ llIIll _'; ',i!f,'iqi_._....,... ',"',",. i + "-": ."v ",I I _, I I I I I I
I0 +
Hz
I
MIT Space Engineering P_search Center

rm_
c_
8 "
Ii

_° _ _
°
0 ca Z
°_

/
/
N93-2816(_
O
,¢--I
¢J

0
C;
0
° _,,,,Q
¢;
0
0
0
0_
• _,,,,4
_P0_
,.o
0__P0
0
a3
;q° P,,,I
,.o
_P
©
©
• _,,,,,I
o_,,I
0
I
>
0_
©
0
_p0
0
©
0
I
©
0
* F,,,-I
rJ_
©
° _,,,,q
©_P
©
%
b,b_

0
II
©
o _,,ml
C_
°.
÷
+
II

>_
• @
7"
,<

.Y

O
©I
©A-Q
©
©
I
q.)
B:
QO
©
© ..-.
H-
8"---_8 8"---_8
II II
q.)
©
q.)
q.)
O
QQ(D©
_0
>
©
©
"_ _ _""
©
,_o
c_
O
_p_D
_0
©
Z
b/?
©
O
,-_ ©o_--I
N_I
2.

00 ""_"4_
""4 _ l'_
_r_
o_
@

o
_ _ 0 _ ¢_
gl
ep--I
[11el--I
;_ _ l:_ 0
• ,-_ (_J
q_
Q
o_
t,..l_ 0
_ 0
_ o,--I
0
N?
0
2

apnl_.tt:gvIN apnl_.u:gvIN
/
".C

0o!=.4
t__J0
0
c_
0
c_
0
0
_J
_J
©C_
(lJ_J
cd
C_
\
_J
_J
_J_J

hO
0_D
CDb.
e1,_l
©
o
%)
$..
o_.

_D
OO
_>• ,.-.4
oo,--.,-I
oO
r.Do,-4
" n-_ _ ._ _
°,,-4 _
_ .,_ _ _:_
_ _s e
,._ O
O o "'4
_ n:::_ Or....)o _ Z:l
II II
©
I


opnl!u_lAI
2
@

¢)
[j
Ill I I I I
!i
I I I I I
b,b_

0
0
I I I I
/
[
I I¢
¢i
/
i
i
i
i
I I I
_0 H .IO_Oct OAI.ll_IOH
t_
0
(Dm¢7'
b_

i
+

tO
ACTIVE VIBRATION ISOLATION
_/ SOURCE
DESTINATION
• NOISY SOURCES, SENSITIVE DESTINATIONS
Q
OPPORTUNITIES FOR ACTIVE CONTROL
CURRENT WORK / FORECAST
/
i_v"

AizgUt,atLeoi
Noisy Machine
Flexible structure
C
pter Transmission
_ -_ FlexibleFuselage
Noisy Space Station
Sensitive Instrument
Common Features:
• The mount represents a "bottle neck" in
the disturbance path.
• Structural Response is poorly known.

DYNAMIC MACHINERY ISOLATION
_ount
[ f,exible structure ]
flexible
sensitivedestination
FT }mount
structur,
F"D
Fo - disturbance force
FT = transmitted force
STIFFNESS OF MOUNT
.'_o
u'}
°_
f
|I
!II
, I
ideal
fpassive compromise
Ifrequency
r
disturbance
spectrum
II

ITI NA PA IV M NT IN
DESIGN MODEL:
Rigid Machine} _f DSoft Mount t _ffT
Rigid Vehicle} /f/////f
(disturbance)
(transmitted)
I mount with
I internal dynamics
I ; _,_.. ,, . soft spring_ J _ ¢._,_,, 1: p_ mount
well isolated
disturbance frequencies
EXAMPI F: Naval Machinery Raft
©
Hull Structure

____P

RESPONSE FREQUENCIES:
Machine:
t0
Mount:
t tt_0
r
Vehicle
t0
MODELING APPROACHES:
m_,4_ flexi ble -._o.
Vehicle
II ri_lid_'_ f le x i b IeL
v
r
DI_'TURBANCE SPECTRUM
bmadband
0 Frequency
12.._

H N INDEPENDENT M NT AXE ?
If O)Dist < O)Flex, then a flexible body is rigid.
few axes, perhaps

OVERVIEW OF ACTIVE APPROACHES FORMACHINERY ISOLATION
Broadband / Semi-passiveNarrowband

ACTUATOR OPTIONS
GEOMETRY ACTUATOR REQUIREMENTS
ACTUATOR D,I THE LOAD PATH:
machine
vehicle
passive
} active
ACTUATOR PAR.AIJ ]=:L TO THE LQAD PATH
machine "_
passive ]active
vehicle
p_aCtive
FREQUENCY
illc_ FREQUENCY
FREQUENCY
FREQUENCY
v
v
v
v

BROADBAND/SEMI-PASSIVE
1) Variable viscous damping"
_etol
fluid
ee|e_oir
\!!
_T fc4
i _ '_oct!ot_
Graf & Shoureshi, 1987
(also much work on
vehicle suspensions)
Figure la The Semi-Active l--t.,,'drau',ic Mo_'_:
Cho$$i$
Figure l b installation of a Hyc_auh¢ ?'doun[
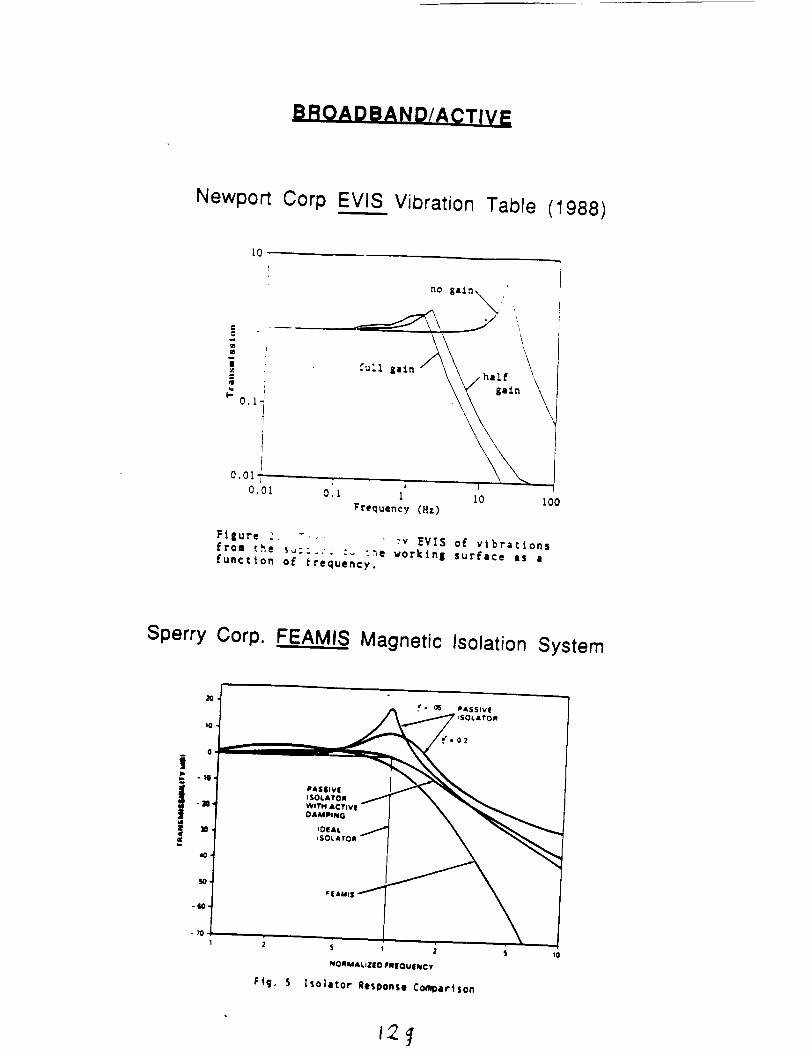
BROADBAND/ACTIVE
Newport Corp EVIS Vit_ration Table (1988)
10
G
..J
,I
t.-0.1-
no 8aln_ '
full gain hslf '\__
O. i l lO lO0
Frequency (Hz)
Fi|ure :. - • :v EVIS of vibrationsfros the _:::.'. :_ :_e workini surfsce as sfunction of _requency.
Sperry Corp. FEAMIS Magnetic Isolation System
m0
SO
-6CI,
-tO
i -M;
-m
!• ,m,f
c
t. 06 PASSIvl
A_ ISOLATOff
t'. 02
'w,T. acTJv! \ "_-__
JSOtATOA / /_
_EAMJS /
5 2 _ 10
NOIIMALIZIO t!ff|OgllNCW
F_g. 5 Isolator ReslDonse Comparison

lO09O
eO
?0
$0
SO
40
30
2O
_ASSIVE
ISOLA_O_I_
I-_:AM /F_UN_2TION---_
_ASSIvE......_..,,..,._MOUNTS
[
ACTIVE/_aSSIVE/-" ISOLATC_
#,./"WATER TANK
\
I ' ' | ''''
,..,10
I • * I ....
I
LOg FPequoncy.
I ' ' I ....
ACCELERAT_N
10 1000
. _oISTU'_BANCE_
1MACHINE I :, /
I_PEOANCE I "-_ac_ I
/ l ----7 Vm a {MACHINE \
PASSIVE 2 I,_,,o.
F'0RCE I ! = I
o,uoE ? I"---I___I I I v- {F'OUNC)ATION'I
' fa _ VELOCITY )FOUNOAT I 0N Z, .., [
IF,_EDANCE '" I
I
I/////
TWE poo_T Fo_c_ 5_J5oI_
100
90
m eo
-, 70
_' so
_" _o
20 I , , |,,,
10
I ' '1 .... I
MAGNITUDE
,_ PHASE
..... tin|,,
I ' ' I''"
";"'".,'_'y-,_-_._..,
--',, ::_
1000lO0
Log FPequoncy, HI
| ' ' I' • ' 360
_70 _ n
110
g :• 10
olI !" 5
oi0
-270
..... 360 10.1DO00
Fig. 7. Open-Loop Frequency Response for Uncompensated System
I
i - • i .... ! • • l ....
, , I .... i . , t ....tO I •
_,,Og Frllel_e_Cy, HI
,,,r li ......
IL_io o( Tr_a_dttmi Force into Foundation for Ac-tive/Pmi_ Mou_t ILeL_tive to Pusive Mo_mt

I_PED_CE-- HI
FI_ T'6H E D
R(TI_/E_
Force (_Eeol
in PEDAAIE__
_ I__Ss,v_-
i-Z- _ ?,.,<__
_ _, ,._
,LUJ
D JSF'LACEnEO T__ (:FIOF,/U,TE .7"a/PE_,C_ )
-- _i£_(.
, Ar_ , ,
i
_el¢._. 61o_>
uj

A pASSIVE NARROW BAND ISOLATION MOUNT
F_ m I
I i
! I
I • I ....:'"/\ -'_fY"., "
l_////E///J//_
fo = sin (o_lt)
A tip-weightedin bending
beam
fTu
fo
v
(,0
VIBRATION ISOLATION MOUNTING OF A
HELICOPTER FLOOR

NA RROWBAN D/ACTIVE
Basic principle"
(well-known)
destabilizing
Provide compensator gain only
disturbance frequency. Avoid
unmodelled dynamics.
at
DISTURBANCE
SPECTRUM
v
03
COMPENSATOR
GAIN T0)
v
ACTIVE MOUNT
STIFFNESS lv
(O
MIMO implementation?

CLASSIFICATION OF APPLICATIONS ANDACCOMPLISHMENTS
Generic
Important
Responses
Adapta_
Disturbance (_ctuators f Phvsical _ Sensors

NARROWBAND/ACTIVE CONTROL SYNTHESIS TECHNIQUES
Adaotive Sianal Processing"
t ach._._..£o
_i_o_, _ /sensor
adaptivefilter
Tuned Oscillator in Feedback Loop:
sensor I
"7s2+°_2'
t2;.

NARROWBAND/ACTIVE
FUSELAGE
GUIDE LINKS
CONTROL SYSTEM ISOLATO_
.CABIN ISOLATOR
io- 1 1 l I I Iit
i• NO LOAD
o LZO_b LO_(_O.45KI)
I I 1 T Ill
, •D
|i
,J
OJ
Allen & Calcaterra
(1972)
0.01 I I t I I III I t 1 I [_1I I0 IO0
FR[QU[NCY, Hi
TLquto ZL: vettl¢_| "t_lnlmllllbUlty o| /cure Sell Ilolttot In
|lOlltl Mode Mouurod CX_rmg LlDo_ltory Teltl

NARROWBAND/ACTIVI=
Machinery raft
5+.,,°°+..,. /._. ..,riLl
/ /J'+'++'"+°°=o"°"_J___I
IJ IIFill...I.
_.0
kGMAG0B
_o¢@ ccLn_lalK)n
LC,MAU_OID
-70
Mto¢ ¢Qr_ttotnOt_
@0 HZ • ]ID_ +1
Fill. 7. Sensor I autopoweT Iixctr#.
White & Cooper
(1984)

NARROWBAND/ACTIVE
E_IGINE,,,=o^_,,_,_ $11_OTHERVIBRATION,O;"_"_" _wI_STATIC AND DYNAMIC
ACTUATOR f"_,_FORCES
(active moun:_l _ fSEATING•
lesi d-u_l transducer
Fis.5 The actn_ enginemount prrc.entsenginevibrationroachingtheNm'in| but _gnoresallotherfurors.Itth_ holds
the entreeriIwllyali_wL Any vibrm'lon _om oth_ pa_ ofthe _ructure which my be _m_srnitted ouz the seating to themount (ia, the ncvers¢ dirt_"_ion) is tn_ed _nticall¥ -- it isignored and not r._oflled. This is an essenrm/ fe_unt of any
act_ mount since c._mcsl_ation wou_d not be occurring at"source "_ _oould result m actual enhancement mot her _ansof the structune.
0
.4(
,_(
.4(]
0 250 50CHZ
0 H7 250 50Q
FiI.& T_,,mical_i¢ specrnJm}_romthe activevibrationcancel.
lation ris -- (a) before canOrllation,(b) af_,r cancellation.
EGHTESADI & CHAPLIN (1987)

k_
>-
rz
!
kJ
o.i
m
0CO
I
0.m
.Q
ID
.0
0I,_L_
Z
.__ _ 0
_-Z_
0
• c0c
U. --
°_
E
0 ._N
i:r.,_
Q _
o '_
• ,oi ,
vC- _
H
0

.IDii
"13

NKN WN PLANT PHA E
Compromise between performance and stability:
Possible root -loci (local):
(Collocated force sensor, piezo actuator)
ComDromlse:
Make compensator damping ratio equal to plant dampingratio
(Limits theoretical active disturbance attenuation to 1/_)

,
,n++n_d_om ,_a 03+= i I/1 +1
r i
/rtm,-+_r. _ t_cIE J_ t=++==(0._ t 0 M,'Q) _,IMd m i,M
Filure l. Dct"-ls of th¢ mount d_iln u_d labo_toe I ¢xpcnmcnuLl n I
3+66m
A
OI_,C_.JN,qL PP,gE tS
Of POOR QUALITY
-80
_'_ ,._ ,,
/ _ _ " _i ,
x +A_imlle] I O ° ° +-
• _ = +- ..--o-x.,_--=s..t=.,,,¢..,,=,.._., _ o _ _ : -"
F.,'eque_¢vH.z ^"
FilI_'e_ Reduct=ons_ cost_ ener|y t'uncuonst'orthesystem+::.,_+¢,_c_lpnmu3,e..xen=aon.
=
,T
-3O
i,Ili_
IO., L: _U+--
X ,/ -//
0 X :g X o
° "_ " i °
+ :
0 Frequency
Fil_re 4. _on= i_ cost lad ¢n='17func,_onst'orthe systemw_mhonzo_udprU=mTy¢¢=i-,=on
,..j
,,i
-so
9_ x/_t _ o _ _,_ ', ,, ': __-,
o! '' ;+
O" AlOiimll I_ J=t2. 0
0 Fn==.uency _z _C'¢
Filrt_ -_. Redu¢loes m ¢o111 =_1 e..e_rj, funcuons for the system '.,.qm ver_c_J
_3_Jt2_AX_ P.XCIULI_OII ll.lld _ _ S¢flSOn LQ¢41te4 011 IPl+ tntex'1"rl_."lllt¢ pilteS
0 "0
v
==
-80
X m l_lmlm _ J_,4.
X
x ,S <_ x x x0 0 X' X X ]:
0 00 0 0 o o
z--.._
-!O0 Fmqucacyb_ ;_
FilFue 2. S¢c0on of the experimentalsyscemused[o measw'¢the redu¢,,onsin PSD tot :._e• cselins_ar_on, also shown is a planviewof ch¢r¢c¢iveTandmeasu_ernemlo_aoons
Filpmm6. ll,.educ_onl inCOllInd enorl7 func=ons for _ system ,,,,tinh<x't=oaud_ exc=clo_ _ ¢I_a'mr sensors loczt_ on thein= plams.
g8 DflCL f]g IqqO

Error sensors should be carefully selected
Colocated force transducers make
Flanking paths may be important
good error sensors
Uncontrolled axes are flanking paths
Active isolatic_ c_ oeriodic disturbances
widespread _m_i _ me.ntation"
Each application:
how many axes?
flanking paths?actuators?
sensors?
plant dynamics?
is ready for

_u
/--_\

_ q_ -rp
j_
_L
q_

Lightweight Mirror Positioning onInterferometer Testbed
9
102 f"
10' i_,/_ _ _
100 r ' ' _-:':
Pistonon Pla_ C marl Ii
I I I I I I I I
101 102
Hz
Piston on PlateA rnarll
*°L @10_
10"1 _
10;_ i , , , , , i . .
Space znSineerin8 _search Center

RE A T: A TIVE VIBRATIONISOLATION)
Active control of periodic noise (narrowband) is easy
and important
Active techniques will have major impact uponnarrowband .?_,.¢_,_, ('_ o[Nion when
_jDesign requirements prohibit soft mounts
Performance demands justify cost andmaintenance
Broadband isolation will remain passive or quasi-
passive, particularly in presence of important plantdynamics.

J
°_
__ _o

O
o_
_--q _o_°_
l %II %

0°_1
•,-_ 0 0 0 _
l-q g'j
_. _: _:::1 "_ "_
•,-, _ _ ;::I ._ _ ¢:_
0 _ O "_
I
0
0
"a
r_0m.,
s° 2 _
_3
P-.
{'N

Uo_
o

©C_
O
O
c_
° _-,,I
,.c:O
;>.,
O ©
i,I,-I
rj
,4--1
ch
©C_C_
c.h
ORIGINAL P,_,GE tS
OF POOR QUALITY

%

o
o_ o_
°_


r_
__ 8
• • _
•
• • • • • •
@

>-
zoot._, p__.,_" _
t,.p ml_
t,,.,.
t_
°_

L_
C

k..
P.
k_

m
\
\
\
0
o
AIIII
b_
@

@

\.\\\

_z:;/
,111_
Z_
tI
I
©
° _,,,i
© -
-1
m
_o
_4
@

._
%
@

_>
_N _
_- _

al
o_

J
S_
_OOO
0 I=1
_s
I.,.
;a,
"I:Z
°,,,_
@

o_
°_
ovJq
"4-; 0°_
°_-,q
0
0
N
0
o_
0
0
0
ov, m_
o0
°_ _._
t' o
0
r_
0o_
0
o
@
("4
o _ _ 2
.iv,, , u , .,l_ i w _ i g,ul,, w w , ii111 • i , ,
*'i::i
C_o_,_o_ _m_l_
c'4

@

N
I-(
,,l-)
0U
oP-I
!
=
Q
" ."_._!,',.1" -'
o
_ ......_.--:_
I
e_*,.
\
Ill' i i I lUlll I i I IIl_lJ ' IIlllll I I i ,1111 i I i i , _
Cqo,_o,__'I_[
oc_ o
U U
G_<_N_
U __ 0
<_
kq

I
0N
o_ "-_ 0
_ o
s _ _.._ _ ._ -,,
, • • m , • • • <_ • • •
I..,
@

Q O
o _ o_ o _
_._ m _ "_ _
o0 m <

:!
_ _) . ] - f
N 9 3-_-2:8 1 7 1
Ii
e,.) F..r..a


0
•_ o_
_>
!
Ill!,I _ I I_

c_ c_
_rac_
°1--I
I I I

_ I I I I

li@

!
0 ._ _'_ C_
_:_ _ c_ _.o"_ 0 '_ '--'_ "_ "_
I 1 I i

_A

• 0

_J
.<
i-,,-I
_°_
?,
Q_
_=
r
==
I
C_

.1iiiiiiii.............................._i_!ii_iii_iiiiiiiiiiiiiiTiii_izlzi:iiiii!iii................
iiiiiiiiii!_!iiiii!iiiii!i!t!:i:i:i:i:i:'_'_ iii!!!171:ii_!7i Tiiii _ :[;i:i_]:i:!:i:
:i:i:7:i_i_i,__ :[:7:7:[:]:i:_:[|
>..
• • •
!i!!i!!!!!!!_i!!!!!!!!!!!!!!!!!ii_iiiiiililiiii_iiiii_iii!i_i_i!i_i!_:.:,:,:.,,.,...,..,.,................._
{:7:_:i:
iiiiiTii............
D
li<_



o_

fo
-n
0
©
@

0

q_

8,
_I_°_ i
_I_ _
2 °
,_ _o o o-_ _
Ii@


0r-,,-4
,_,lt
r,,,,,,4
.,-,@
u
X
,._ II
iN
_ 0
0
x._
"G×
U _ _J I
o _1u_ _1
o
x _
e,i

-_==4
•i_ .__
J

e_
@
@
_o_
@

°_

_.L _,i
N93-28172
0
0
¢9
f-
0 '--
¢.)
¢9

0
0
°_
I
©
I
0
o_
©

a
r........ iI _L_ ,
_ .... J

tt_
,, I
0
II
o_
t_

I
o II
(us) uo!l!SOd
=EOt.,_
_o
,.-. ,._
I,,,,,,

_ + _! I
I I _'_

II II
t"q
II II
(tu) uo!l!so d _
_[zq 7, _[¢q ,.
I I I i l i
(poz!irttuou) oPm!idtuv
eq
o,Jq
E-ta_
,q
,4
I.n
6
e_
_a_ I" _ purtmUOD
"7
• . _ • _ _ '
purtmUOD
|
I
I
II!
II
I_t
¢,2
°_
Iikq

@ @
..... 0 0
n !
!
I
¶
/
,,b_'e'
I,
%%
4, i '__''_'_
4_,4t,
_P'4'4p_p '
PB _m
"'"r",,
I 4.... _.. ! '_,,_
I 1. I [ ) [ ......
uo!l!SOd
ee3
¢.q
¢.J
o_i_

r.eZ
CO
,-i
.-i
,4
(poz.ffeuuou) opm!idtu V uo.rl_q!A
c;
¢xl
0

E_
E

I0u_
!, ., . ,
0 0 0 0
O_uuou) _du_v
C_
N
o
q i J I i i
o 0 0 0 0
(p_r_uuou)a_m_du_
o"
o U=
_.e_
o
II
I
F----I
I I I I I II£) I',I l.l') I-I I£)
(p"_tIL'tu2ou) opm_du_
'.4
¢0
,o .I_
>
>
0
k.
_4

I
¢'-q tr_
II II
8 8
0
c5¢5II II
8 8
i,¢
@

E_

©
E©
Eo_
||
0
J_
©
t_
o_
E

-F-I I
I I
o1,, _ "v,_o
I I
- ,..._
II
_4.uq
q_

0
I I
I I "I
N
0
_M
II I I I I I|
I..O I_O _ I_O I_O
CD C_
(p_z!IeU_OU) _Pm!ldmV
N

i
I
I I I I I
{Xl
0 0
(poz!Ieuuou) opm.qdurv
LO0
O
N
0
CO ._,¢.)
ca_
('_
I
I

L_
L_
I I I I
(_ (:3C3
(poz!I_tmou) oPm!IdmV
LD¢D
0
C)
¢0_J_J
N
I
I

E_
I
X_

Tmq
0i_,
_L
q_

_o_
©..=o
o0000
I
I I
I I
II
Ii
I I I J
0 0
(p_z._euuou) _pm_durv
ILO(',,10
¢5
¢:;
t.D
¢:;
¢5

,-i0 0 0 0
(po .z_ttu0u) _pm.qdtuv uo.u_q!A
[.0
x_
N

r.,,'2
0
e,q
o.¢,o
g
¢',1 ¢'q, _',
(_ap) aI:_tW peoI,(ed le!l.IauI
go_D
I
¢,q
0
I
.E[.-

(unu) luotuoaglds!G lu3.odpu _
h
0
¢.q
©
E° _...q
[-

a.,
,.=
O
I_r"
(tmu) luatua_elds!G lm.odpu_
q'3
¢q
[.-
ba

u:
L J!, (
,)
(,%
J
,,D
E[-
ee_
0 0
(turn) m_m_glds!(:I m!0dpu_t

I.D
,-4
o c_ o o
(p_..l-etmou) opnl.qdmv uop.g.IqIA
P.

o'Z
r.tz
)¢)
_D
L............................................................
/
(tmu) motuozgIds!G lm.odpu_
(D
....d
b-,
k,

L_

V:
i
oo _D '¢_ ix],-i
0 0 ¢D 0
(p_ .z_uJaou) _pm.ridur V uo._JqIA
kD
,4

t'_ t"xl ,-- g
(cutu) luotuoorlds.tcI lm.odpu_
[-
Ii

eq
r_
\
,-4 c; c:; ¢:; c_
(po.z_ttuou) opm.qdtuv uo!lr_q!A
t6
,-4
,2
"t:

L_[!
u
t_
I
........................ ,...... , _r li..................
..........................................................................1.......)_...........................................
//
f
/
i
J
0 ee_ ¢.q ,., _ ,-.,
(turn) lu_tu_ids!G lm.odpu_

r.r2
r_
iiI
i!
1
i °
lo
I
I|
c_ c5 _ c_(urtu) luotu_o_Ids!G lu3odpu.'q
op.._
b-
_g

o_
_E
_._
•-_ oc_ .= N
Z _ m

N93-29173


f_

i •
z_
W

!1 i
o_

©

liq_

@

k4

°_
k_


Q;
i
I0
0


ORIGIf',L_L. t,-.:_.:_ i.._
OF POOR QUALITY

ORIGINAL PAO£ 18
OF POOR QUALITY

OF POOr_QUALITY


_° _._ ,. _:-i

i '* I I
"Hii- I I- I I
'_- "HII!-* I I
= t I
- 1 I I_1II_IBI I IE]
" llll I I 1_: I Iltl
" °' "!!": --_H_1,,; " ]ii'J____._._ ,_- iiii; i" I I I I I
---_l: t I I Ill
¢,
"IZ

4Pap
i ._=4 i
o I
Y
_]'_ = _,_
I _-. _-
--<
T.i !
Z-1_1
mtel
=
i ¸_ _
_ _ _ _ii i
;2,

0O
t,_dl
F .,-,q !F_ I
_--Ol
T
2
2
--r-.--.t---
_g
-r
o_
@
1
00
l
q_

°_

Z
0Z
yj,._
N93-28174
0
0
Z _O_0
r_r_
O_
0
0
0
0
0
o _
0
cO


r_
.<
©
O'
r._
©
° _"-I
t,-I¢)
m
0
r_• p-,,I
¢)I-4¢)
O"
I
• _-,,I
_ II =_ 0
_ I 0
©
I
¢:_ 0.,_ .,--,
IIVl.-= :_
_ °
+ _
II II
°_
II,_,,0
II
I
caca
I
+
-t-
+0
I
II
m
II
©
©0
"E
°_

MISMATCHED LQR DESIGN
1\\
0
IF
-0.5'0
k--.5
5 10
0.5
0
T'lille
0"5" l
o_ _/-'_
k=1.25
!-0.5_ , ,
0 5 I0 2O
Ti,lne
i
15
0.5
0
-0.50
k=.875
10 15 20
Time
k=1.625
i i
10 15 20
Time
Ic=2
.0.5 i0 5
i
10
T'tme
i
15 2O

RLQR DESIGN
k=.5
l\\
0.5b
o_ _
-0.5' o _
0_-
\I
i-0.5 Lo __
10
T'ma¢
k=1.25
I
10
T'h'me
15
L
15
k'=21
0"5 1
o._
2O
2O
0
-0.50
0.5
-0.5
k=.875
5 I0
Time
k=1.625
15
l
I0
Time
2O
2O
,,g"
"O'50 I0
Tame
15 2O

P_.

U
ml=l _ m2=l I
.5_: k _: 2
I<= I. _2.5
°if-0.51-
_110 10 15 20
Tune
0.2_
0.1
0
-0.1
-0.2 o i I 15 20
Time
1
0.5
0
-0.5
-1
-1.5I0 15 20
Time
0.2
0.I
0
-0.I
-0.20 5 I0 15
Time
20
ii
o I
-1 j
"20 10 15 20
T'llne
I
0.8
0.6
0.4
0.2
00 5 10 15 20
Time

0.8
0.6
0.4
0.2
00
5 lO
Tune
5 10
Tune
15
i
15
2O
0
-0.I
-0.2
-0.3
-0.4
-0.50 I0 15
T'tme
2O
2
I
0
-I0
I
Time
2O
20
2O
I0
o/.i
-I00 5i
15 20
1
0.8
0.6
0.4
O.2.
00
L I I
5 10 15
Tune
20

[3
0
r_
0
ol--=l
0o o
o
0
0o o
r_
0
o
o
r_oo
r_
_0
C__q
t_
O"
o_
0
II
V/
V/
_o
%
_o
_o
_o
_o

MISMATCHED LQR DESIGN
0.02,k--.5
0.01_- : :_
0 _]"_ ] " _,_!i
-0.020 5 10 15 20
Tune
0.02,k=1.25
i
oo'i , t
1' _ ' 4J "_010
I
-0.02 _0 5 I0 15 20
"r'lJ_le
0.02
0.01
0
-0.01
-0.020
0.02
0.01
_, 0
43.01
43.020
k=.875
i/ ,i :v W" W-
h
5 I0 1,5
Ttme
k-1.625
5
20
i() 15 20
"l-mne
0.02, k=2
i
o.o,_ :'t i"I ,:
oF,_ _ i i _, ' - t_-0.o,; 7 '_'_'" _ '_
, !I
43.02 t0 5 10 15 20
Tune
Distm'bmrme
5 I0
Time
15 20

RLQR DESIGN
Ic=-.50.02 r
o.oi_-
' V1-0.01_-
Ii
-0.02'0 5 10 15 20
Time
0.02 ;k=1.25
0.01,_
-0.01 ,_
-0.02'0 5 10 15 20
Tilne
0.02k=.875
0.01
W,_j
-0.01
-0.020 5 I0 15 20
Tune
k= i .625
0.021
0.01
.002 _ ....0 5 10 15 j. 20
"l'ime
0.02,k=2
0.01 r-
-0.01 r-
.0.02 _ 10 5 10 15 20
Time
2
1
0
-1
-20 5 10 15 20
Time

+
101
10° I
//
J
lO-J
°
I i , & i aid , h
10o
i
10-410-I
Frequency (rad/s)
-- Mismatched LQR
-- RLQR, ganuna,,I
.... RLQR, ganm-,a=. 5
d , _ I
I0 _
i
I, h , , , L , _
I0=
101
10 o
lO-I
10-2I0-_
.... ,T ....... , , , /
;I
k _ L I _ k I k , , ' k L i * i L k J I & I
10 o 101 10 2
Frequency (rad/s)

THREE-MASSES, TWO UNCERTAIN SPRINGS

PERFORMANCE COMPARISONS:
RLQR (LEFT) VS MISMATCHED LQR (RIGHT)
1
0.5
-0.5
0.5
i i ,
0 5 I0 15
Time
, _._R k!..5 k2-2
-0.5
! NominalLQR,k1=1.25 k2=t.25
J , i
5 10 15
Tune
-0.5 , , ,20 0 5 !0 15 20
Time
t smm.J _a ki=.5k2-2
O.5
-O.52O 0 10 15 20
Time
I
0.S
-0.50
0.3
-0.5
RI.,QI_ k1-1.625 k2_.875
L
RLQI_ kl=2 k.2-2
10 15
Tlme
2O
2O
I Nominal LQI_ ki=1.625 .k2_.875
0.50 _-_
-O.5o ; 1o isTime
Nominal I.,QR, kl,=2 ,k2-2I
I
, t i i
-0"50 5 10 15 20
Tim

RLQR TRANSIENTS: 2-SPRING SYSTEM: I.Zd"• k:KI= S z
0.8
0.6_
0.4
0.2
oo 5
1
-0.5'o 5' ' 1'510 15 20 10 20
0.$_ i f _ ,
O.5
0.4 "_0
0.2 -0..5
-| i0 5 10 15 20 0
T*u
i i
I0 15 20
Time
J
|
0.$_
0.6
0.4
0.2
00 5
31
2
!
o "_
-I
-2 5
-0,4
, , -0.6 'I0 15 20 0 5
T'm'te
, t
10 15
T'mm
4!2
20 "40
i i
IO 15 20
T"lmle
i i
10 15
Tim
20

MISMATCHED LQR TRANSIENTS: 2-SPRINGSYSTEM
• K - l. Zd"I<'m= _', z
0.6
0.4
"_ 0.2
0
-0.20
L i
5 I0
Tune
1
0.5
"°'50 10
T'm_
i i
15 20 15 20
0.4
0.2
o
-0.2
-0.40
11
, .iJI15 20 0
I0
T'm_
-0.5 1 , ,-
0 5 i0
Time
t
15 20
0.4
0.2
"_ o
-0.2
-O.d0 I0 15 20
0.5
"!0 I0
Time
-O.5
i
15 20
2
!
0
-1
-2
-30 t iI0 15
"rime

Z©
(DZ©(D
©
bl)oP.-I
C_
@
©
P_
• F..-I
c_
°_.-I
I-I .,...4
_O
.,...4

N93-28175
,.I2
°_ _
_'_,_ © _

ol,--I
oopml
0
c_OoF--4
oO
"_ C_
'_ o
o oo _ _ _ oo
0 > _; _-_
%
@

0
o
_D
o
°p-._
.,-4
°,-_
q_
o
o_
°_-_
_oo _-_
o
° _,,,i
o
©
o
r_
. ,,...( (_
• _,,I °F-,I
(1) _ (1)
t I I
_J
o!
I1)
t4...(o
X
o
X
@

r_owq
r_
0
0
c_
0
.n,-i
0
_0
c.,,,;
,....,.,
©

om-I
0
0
©
o_
L_
0
©
c_
0
'-0
I,-,,
o'_0
,m-'l
bO
0
"0
0
oO
0
•oc_
°_-.I
"0
0
oO
©0
c_
8
C_
0
0
bO
I1)
0
0
0
00
r_
0
0
0
ffl
0
0
0
0
0
00
%s
-e.*
,..-.a
©b_

0
o_
0
o
o
o_
f_
r_
r !
I I
| g
_o
! !
IIu u
| !
o
o
E_
L
%
©
0r_
r_
c_
o VI
_ VI
o _
cr_
ct_
E_
rX_
©
o1_4
c_
rx_olm_
rx_
c_
rT_
©
E_
_J
II
c_
c_
i !
°q_,D
c_
÷
Jr _
! I
II
cr_

0
c_
.<
.=
©U
°_,,4
c_
0
I
©©
I
C/3©U
c_
© 0
I.-4
E_
II
©°_,-_
c_
,I, MI
OQ©
x
3>
r.o
c_
bo_
© ©U
I
'-_ _ 0
._'_ e
cO_c_ o
o_,,I
N._.,,._ t_
m _
m _
_ 0
°_,,_
c.) _:I
_q,J
b_

o=
0rj
b.O
,<
+
A
v >_ -Jr-
o
°l.--t
0
b_
I,-4
0
0o_,_
0
bO
>.
©
© ©
-_ --° _00• "_ ;:_ _ _
0 _ ..._
0 _ 0 0_._ _ ._
,.3
-o
.s

=0
e_
0
0
©
oF--'q
0
0
0
0
0
00
u 0
0
0
0
0U
U
0
o
II
+
_Q_P
+
_Q_P
,Ca ,_
_ II II
0
° _"I
0_,,I
0
0
0
0U
0
0
_ 0
0 __: cr
_J
_J
e_
g.._J_J
©b_bq

0ojiI
ol,iI
0
.0
X
0-4_
,.o
obO
,_,ml
,.Q
0
,_Q
. _,..q
o._..i
X
o
_ o
Q
0
Io
+
II
°_..I
_0
r_°_..i
0
o
o
C_X
o
_Q_P
IIa,
0
0
0
g.
nt- ._
_-_ _.._
;-_ ++ o
+ _'_+_o
+ +.,_
II II
0 0
oo
0
0
0
.o
0_ I:1oco
X
_ o
°_..i
•4_ . ,...._
r_
o o
_m
,.m
o
o
0
0 -._
r_o _
%
_J
b__q
0 •
II
0
%

c_X
_J
_J
©
O_J
c_j
c/]
!oO
ofm_;-o
_J
ogl_
_J
(lJ
°lmq
©
_J
cd
_J
oo
E_
II
C',,1
C_
-t-
_ool_q
_J,_Q
_J
or]
c_
q.)
©
o_e_.p
II II
_J
%
_o
_J
_J
©

0
0
>
00
0,_Q
°F--I
:d
,-C
0
o
c.)
u_0
,-CE_
0
<
<
ISOD I_UO!SU_U-q.puoN
oo
¢...'e-._
q.)
¢-..
©
co

0o_,,I
• _,,,!
0
Z
,_o
A
¢m ,(_:_ v0 A
C/3
, ,,--,I
v
.,--, ]
° ,-,,I
° ,,,-I
_r_o
0_
_Q
0
° ,,,,,,,I
m_
o
_Q
+ + o
'_ ++ _.
> _ ._
II II _ = ¢_0 0
o 0 _
eO _
>(1,,) ""_
0 "_
0
©• _,,,I
_ _ ..-
0 "_ _
o _._ o_0 .,_ . ,..._
G
G
0
°_,_
0
°_,_
°_
°_
0_
0
._
0
.o __ ,
I1)
_ ,-_ ©
I I

0
W,m_
0
0
c_0
E_00
W.m"4
©
0,.Q
o1,=_
c_
cd
_0
Qim.,q
_o
otmq
©
' iiiiiiiiiiiiiliiiiiiiJ
Iiiiiiililiiii iliiii!i!ii
c_
E_
VI
c_
II0
+v.--4
II
cdc_
0
cd
°_.mq
t_
cd
C_
J...
°_

ew-i
0
I===.4
0
0
o_
0
.,...=4
0
0
.,'==4
s_=4
0
. ,...,
,=_
0
,...-4
0
I
0
I
0 00
o II
Jill I /
,--4
iiiii i i i I
iiiii I I I I
o o
opm!t_eN
C_
i I I
i
(_(I) _qd
o
_J
c_
_J
©b_b_

.I.--q
>oo
>o
• v,-I U
,< °o ,...q
,.=
<
0oc5
I I ". I I I
i
i
oo
c_
L_
u_
k_

i>
E
0
0
,x::
0
00_,,4
0
I oli_
m,1 r._
_,_,.,'-000 too
0
_:_ 0
I I I I
0
0
_. ...... -i-_ ........'":"'"""::......................i .....I.....................;' l
: II
i
" r
t
..- ,,.- /
:.T.T.-..-..-.:.:.:"="I
o _,._ o_
_5i
:_so:3doo"I-posoIO
o=_.,..,;>
e,-.-
©L..-.,

0
*e.-q
0
0*e,-e
U
c_
r_0¢.)
ol,--4
0Zo
...r_ i I i
'..._
! I ! I
° _ o
_, _..,_.
-F •
'..0
,.%
"_
M
t¢'3
0
0
('I "_
0
0
I ' I I I I l l l I 0
]SOD l_lO,L

k_0
oF_l
0
_ _o_0 0 _ 0
o g..,_
O_ "_ _ 0
0a _ _ao o_ _ o
•-_ ,_ 0 _ >
L'q _
0 _ _ _;
0 _ 0o_ _0
0 > _ 0
_ _ _ "_ ,__
o _o _ .o _ o
0 _ 00 0 -_ ._> _-_ C_ _-_
bE
bO(I) °'_
0
0
0
_0._ >
0
e _ ea
g.
c_
c_
c_
-e,,_
©b_

C_
C_
r._ -o
/
N93-28176
$-4
Q)
_._

o_
OI
oP-4
0 ,__
0 _
r.I3 _
0
F.z]
0
0
op,,_
!
b,O
0
o_
_U
°_
-_

e_
gl
0
0U
U
0
U
°_J4
-an_
r_ r_
0
,-C
gl
0
• _,,,q
0
0r_0
m
0
0u
u
m
b

Ii

k..
I"_ba
t_3

E_

r_
or_
r,-I
t_

e_
I--4
0
@i
I
I
.I.-4
0I
I.-,
0
I
.,if
0
X0
..l=J
\
\\
\
\
\
\
\
\
k , , 1 1 , L I , , _ I , L i I , , , I i J . I ' i '
0 0 0 0 0 0 00 0 0 0 0 C) 0_I _ c",l 0 _ _ _'_
(ed:iAl:)ssa:_,S
0
000
00
c',l
0000
0_,_1
00
00
e,I
0
_3
Iio

eth_,
• 1,,,_
CL, IJ'll_ I
U I
OI
'_ I
._,--4
0I
• w..,.4
@
I
P--4
U• v,,-4
IiJi]
0
0
\
\\
\
\
(_dIAI) ssa_3,S
I_t')
I.r)¢_1
t_
c.D
¢-xl
Ii

L_
_r
li

_1 °c_
!i - '
,mmllm,lmmll
J_°o............. I
........ oooooo°o'1
I
L_

MA 'oougq.m_s!p/_uotuoogIds!(I
§c_ ,_
c,,I or)
°_,_
t_"0
t_

P.

o_
r_ r_
r_ r_
r_ r_
@

11
°_
°_
°_
/
/
I
I
I
1
1 I
1 I
ri_i........ .l-_ ................
...............t ...............................:.......... i............_'._J_J i.......•................
i ,, .x_ .-Z' '/
o o o. o o o. o o o
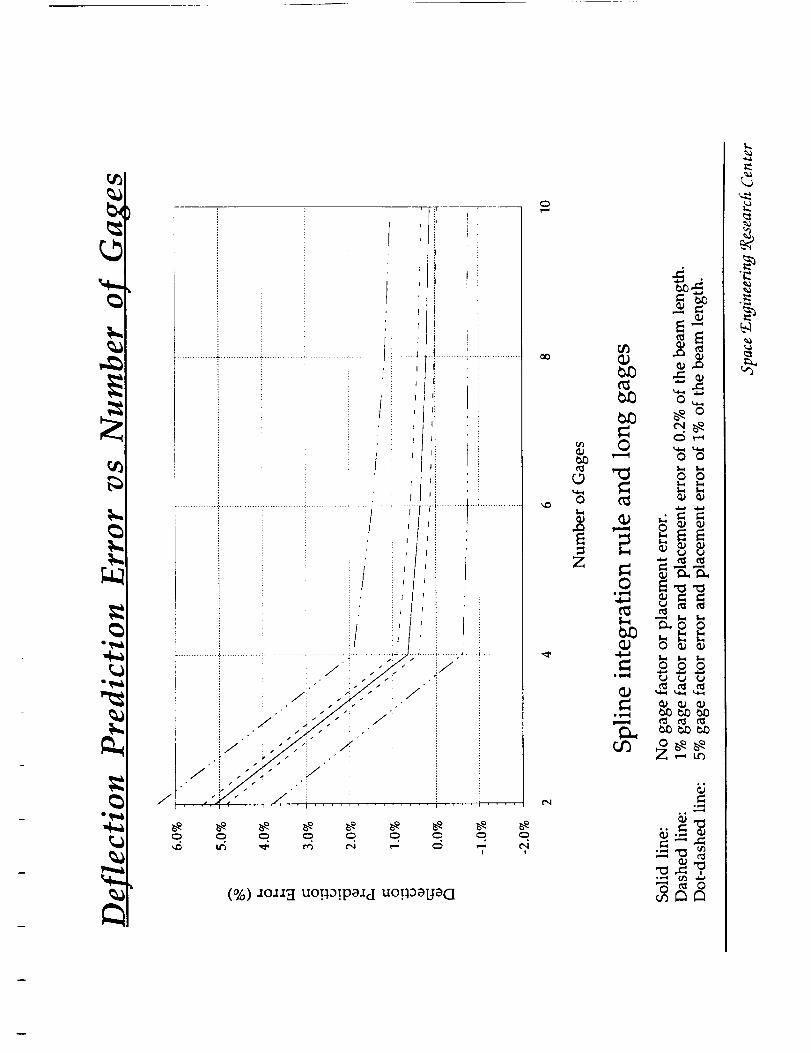
(%) =o=_q uo!_!pal d uo!:p_[la(]
o
t_
,_ o
Z0
t_
o_.._
o_,,_
_q
_o
0 ,-',
0 0
0 0
_,ee
°°
@

o_
0o_
o_
o_
0
0
n_
0
0
0
@

@

°_
°_
o_I
<
C_
"Co
o_
C_
0
0
0
u
C_
°_
u
o_ml
0
>_
u
X
° _,,,I
0
0
X_-_
_._
O0
• .
_ 0
0
.0 o
0 0 _

.=.
(/'j
..===
IIIII I I I111 W I I I I IIII I I I I
/I s
_! _ ..__I ._,'"
"_1 ,"_
##
/ ...'
_ I I1! .._
l/ ./
/ "
i//
,,i/,:,,,, , ,,,,,,,[.:_ , ,Illlll I I
o "7, _,C_ C_ C_
I I11tl I I I I 11111 I I I I
"'-.. .......
.._- _ .......::.............:.,. ......
!
t .
I IIIII I I I I IIIII i I I I
,r.-,l ,i,,-.-4
0
opnl!u_I_

Z
O
0
I T I I"
O0
c5
¢5
c5
c5
C'4c5
,e==_
0
°_,=q
¢)
(%) .to_I opm!Idurv

E
z
0
0
0
O
0
0
o0
I I I
0
Ox
¢5
0c
¢5
¢5
xO
¢5
¢5
¢5
¢5
¢xl
¢5
O
b.d)
Ox
.,Jq
0
(%) aosa_I oPm!idu_

0
0
0
Z_D
0
0
0
0
0
0
I I I0
o0
L._
_q
0
° ,_.,q
0
(%) Io_I opnl!Idtuv


i!
i
• i
i
J












![pragna ms 1 to 8 11 5U,]\ $ J0 R0P J0 5Z R0P 5ZFU4 J0 5Z R0P RDG4 J0 5Z R0P TFZF4 J0 5Z R0P HFNJ4 J0 5Z R0P 5U 0Z DF5 SFD 5JG JG Z0 TFJ SFR SF50 UFD RFB NFJ HFU ... Page 12 5U,]\ 5](https://img.dokumen.tips/doc/110x75/5aa661cc7f8b9a2f048e9f49/pragna-ms-1-to-8-11-5u-j0-r0p-j0-5z-r0p-5zfu4-j0-5z-r0p-rdg4-j0-5z-r0p-tfzf4.jpg)
















