Embed Size (px)
Citation preview

Technik und Informatik / Wissens- und Technologietransfer
IRON LOSS CALCULATION OF AN INTERNALPERMANENT MAGNET SYNCHRONOUSMACHINE FOR A FUEL CELL CAR
Electric Drive System Research Activities at Bern University of Applied SciencesEngineering and Information Technology
Prof. Andrea Vezzini, SwitzerlandDr. sc. techn. ETHZ
easc-2009, July 7th 2009
1
Technik und Informatik / Wissens- und Technologietransfer
About the Speaker
Dr. Andrea Vezzini
• Professor for Industrial Electronics since 1996 at Bern University of Applied Sciences (BFH TI) Biel
• Co-founder and Chairman of the Board of drivetek ag since 2002
• 2003 Visiting Guest Professor at General Motors Advanced Technology Center in Torrance (7 Months)
• 2007 Distinguished Visiting Scientist at Commonwealth Science and Industrial Research Organisation (CSIRO), Australia (5 Months)
• Together with drivetek agcurrently involved in projects with Bombardier Transportation AG, General Motors and Porsche Motorsport
2
Technik und Informatik / Wissens- und Technologietransfer
BFH Engineering and Information Technology
• Established in 1890
• Since 1998 Part of Bern University of Applied Sciences
• 6 Divisions with a total of 1’300 students, second biggest in Switzerland
• External Turnover withaR&D 2008:approx. 8 Mio. CHF(+ 2.5 Mio. CHF internal funding)
• Strategic Programs in Fuel Cell Development, Automotive Systems and Renewable Energy
• Over 10 Innovation prices since 1993
3
Technik und Informatik / Wissens- und Technologietransfer
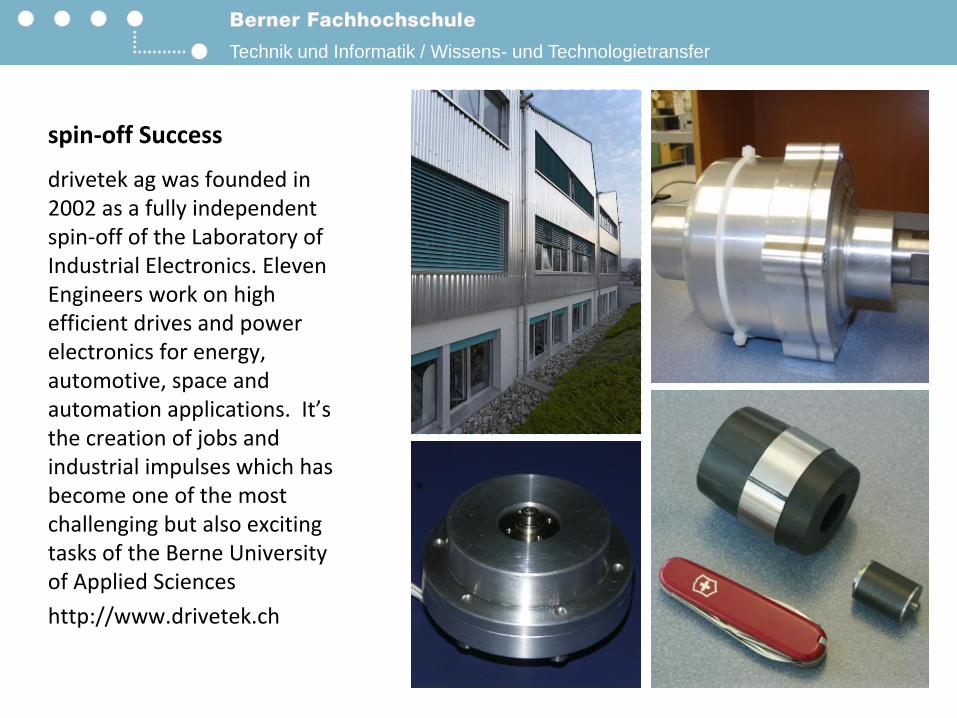
spin-off Success
drivetek ag was founded in 2002 as a fully independent spin-off of the Laboratory of Industrial Electronics. Eleven Engineers work on high efficient drives and power electronics for energy, automotive, space and automation applications. It’s the creation of jobs and industrial impulses which has become one of the most challenging but also exciting tasks of the Berne University of Applied Sciences
http://www.drivetek.ch

Technik und Informatik / Wissens- und Technologietransfer
Content
• Internal Permanent Magnet Synchronous Motor Fundamentals
• Design Flow
• Core Loss Calculations
• Examples
“The outcome of any serious research can only be to make two questions grow where only one grew before.”
Thorstein VeblenUS economist & social philosopher (1857 - 1929)
5

Technik und Informatik / Wissens- und Technologietransfer
Types of PM Synchronous Motors
• The amount of PM-generated magnetic flux linked by the coils of the stator remains fixed.
• As a result, the back-electromotive force (back-emf) voltage induced by the PMs increases linearly with the speed of the rotor.
• As the rotor speed increases the back-emf voltage rises, which results in a rapid reduction in the available voltage, (the difference between the supply voltage and the back-emf). When there is no longer any voltage available to drive current into the stator, the maximum speed has been reached.
• Depending on the rotor geometry, PM Synchronous show different torque-speed behavior.
6
a) Surface PermanentMagnet Motor
b) Inset Permanent Magnet Motor
c) V-Shaped Single Layer IPM
d) V-Shaped Double Layer IPM
e) U-Shaped Double Layer IPM
a)
d) e)
c)
b)
Technik und Informatik / Wissens- und Technologietransfer
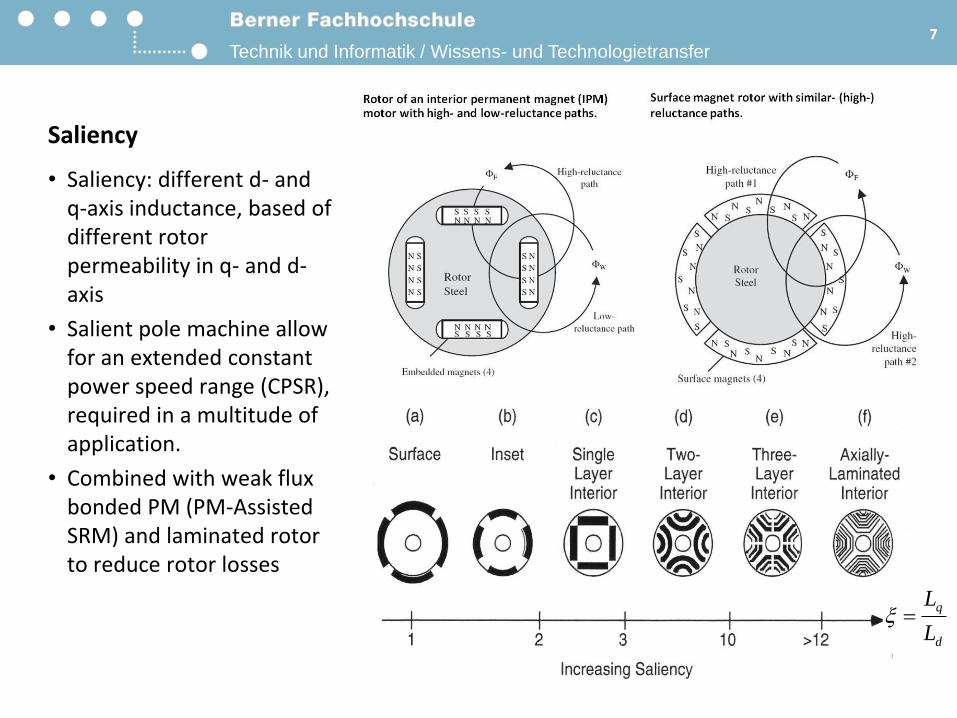
Saliency
• Saliency: different d- and q-axis inductance, based of different rotor permeability in q- and d-axis
• Salient pole machine allow for an extended constant power speed range (CPSR), required in a multitude of application.
• Combined with weak flux bonded PM (PM-Assisted SRM) and laminated rotor to reduce rotor losses
7
q
d
L
L
Technik und Informatik / Wissens- und Technologietransfer
b
jwLdId
jwLqIq
Eq=wYm
Iq
IV
IdVd
Vq
RI
b
gj
q-axis
d-axis
d
d-q-axis diagram
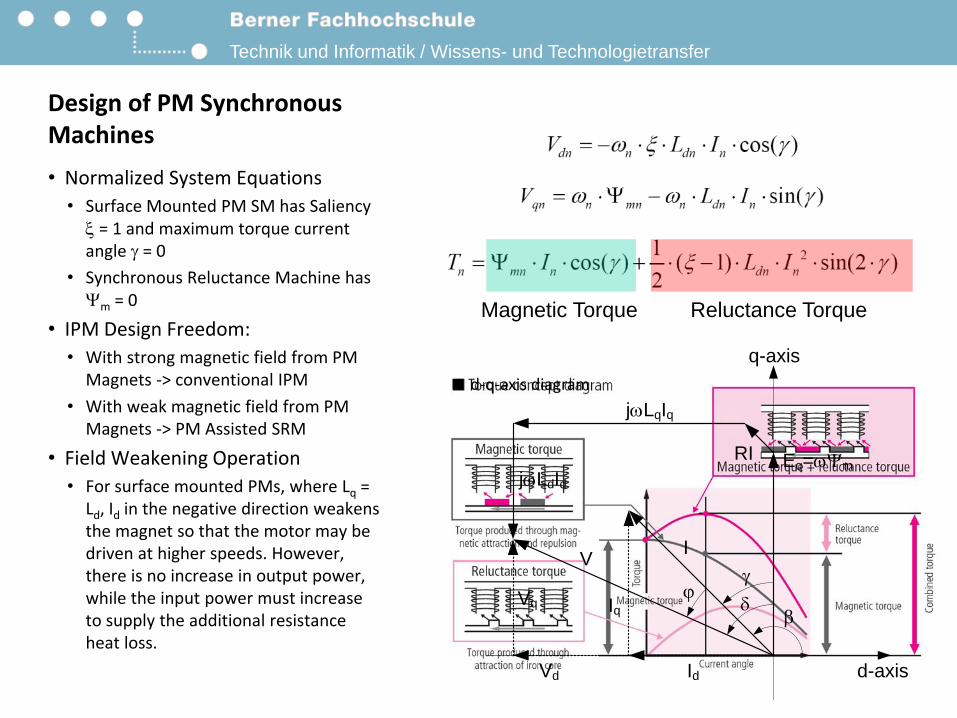
Design of PM Synchronous Machines
• Normalized System Equations
• Surface Mounted PM SM has Saliency = 1 and maximum torque current angle g = 0
• Synchronous Reluctance Machine has Ym = 0
• IPM Design Freedom:
• With strong magnetic field from PM Magnets -> conventional IPM
• With weak magnetic field from PM Magnets -> PM Assisted SRM
• Field Weakening Operation
• For surface mounted PMs, where Lq = Ld, Id in the negative direction weakens the magnet so that the motor may be driven at higher speeds. However, there is no increase in output power, while the input power must increase to supply the additional resistance heat loss.
Magnetic Torque Reluctance Torque
Technik und Informatik / Wissens- und Technologietransfer9
0 1 2 3 40
0.2
0.4
0.6
0.8
Torque vs. Speed (Normalized)
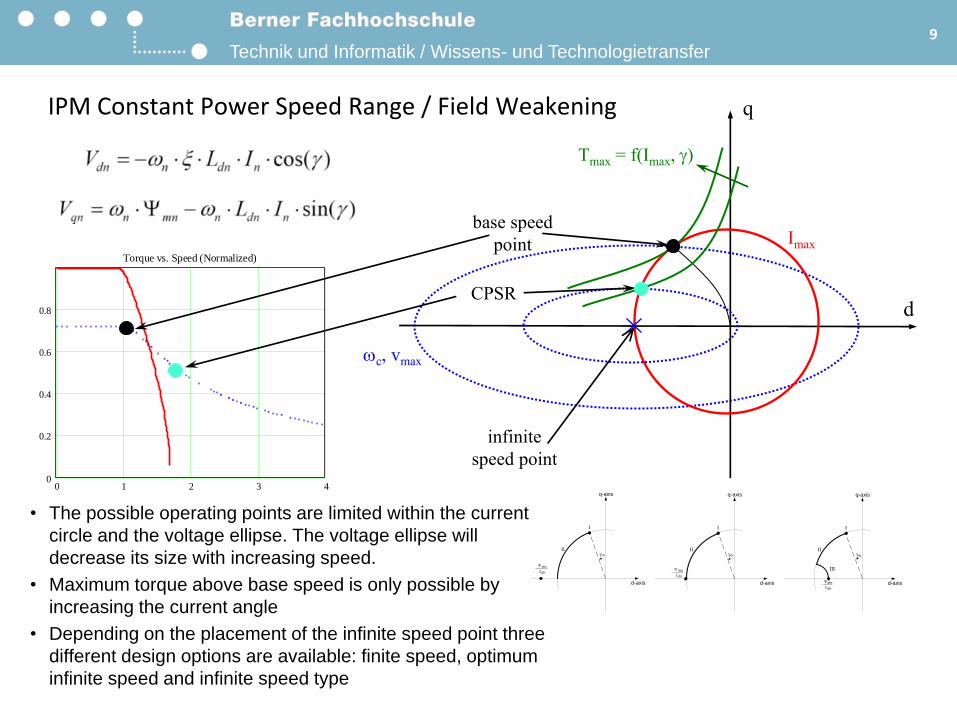
IPM Constant Power Speed Range / Field Weakening
• The possible operating points are limited within the current
circle and the voltage ellipse. The voltage ellipse will
decrease its size with increasing speed.
• Maximum torque above base speed is only possible by
increasing the current angle
• Depending on the placement of the infinite speed point three
different design options are available: finite speed, optimum
infinite speed and infinite speed type
d
wc, vmax
infinite
speed point
Imax
Tmax = f(Imax, g)
base speed
point
q
CPSR
II
q-axis
gm
mn
Ldn
Y
I
d-axis
d-axis
II
q-axis
gm
mn
Ldn
Y
I
d-axis
II
q-axis
gm
mn
Ldn
Y
I
III
Technik und Informatik / Wissens- und Technologietransfer10
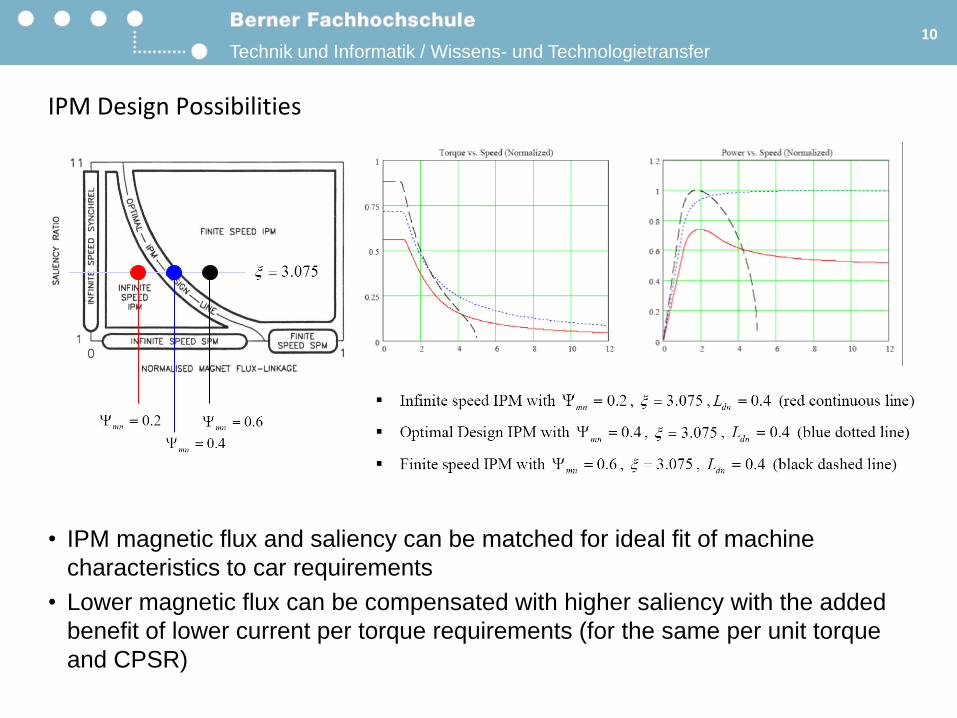
IPM Design Possibilities
• IPM magnetic flux and saliency can be matched for ideal fit of machine
characteristics to car requirements
• Lower magnetic flux can be compensated with higher saliency with the added
benefit of lower current per torque requirements (for the same per unit torque
and CPSR)
Technik und Informatik / Wissens- und Technologietransfer
0 20 40 60 80 100 120 140
-1000
-500
0
500
1000
Speed[km/h]
Tor
que[
Nm
]
Energy [% of total] for 38 km Pendler Cycle
23kW - Cont Power
45kW - Peak Power
Torque for a=0 @ 0%
0
0.5
1
1.5
2
2.5
3
3.5
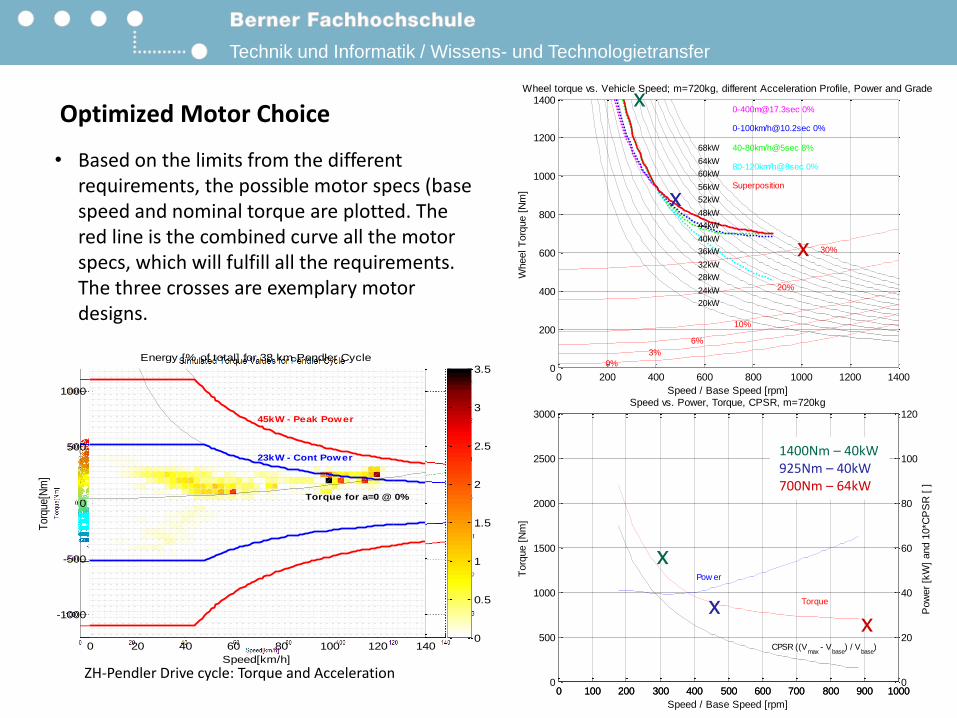
Optimized Motor Choice
• Based on the limits from the different requirements, the possible motor specs (base speed and nominal torque are plotted. The red line is the combined curve all the motor specs, which will fulfill all the requirements. The three crosses are exemplary motor designs.
ZH-Pendler Drive cycle: Torque and Acceleration0 100 200 300 400 500 600 700 800 900 1000
0
500
1000
1500
2000
2500
3000Speed vs. Power, Torque, CPSR, m=720kg
Speed / Base Speed [rpm]
Torq
ue [
Nm
]
Torque
0 100 200 300 400 500 600 700 800 900 10000
20
40
60
80
100
120
Pow
er
[kW
] and 1
0*C
PS
R [
]
Pow er
CPSR ((Vmax
- Vbase
) / Vbase
)
1400Nm – 40kW925Nm – 40kW700Nm – 64kW
xx
x
0 200 400 600 800 1000 1200 14000
200
400
600
800
1000
1200
1400
0-100km/[email protected] 0%
80-120km/h@8sec 0%
40-80km/h@5sec 8%
Superposition
20kW
24kW
28kW
32kW
36kW
40kW
44kW
48kW
52kW
56kW
60kW
64kW
68kW
0%
3%
6%
10%
20%
30%
Speed / Base Speed [rpm]
Wheel T
orq
ue [
Nm
]
Wheel torque vs. Vehicle Speed; m=720kg, different Acceleration Profile, Power and Grade
x
x
x
Technik und Informatik / Wissens- und Technologietransfer
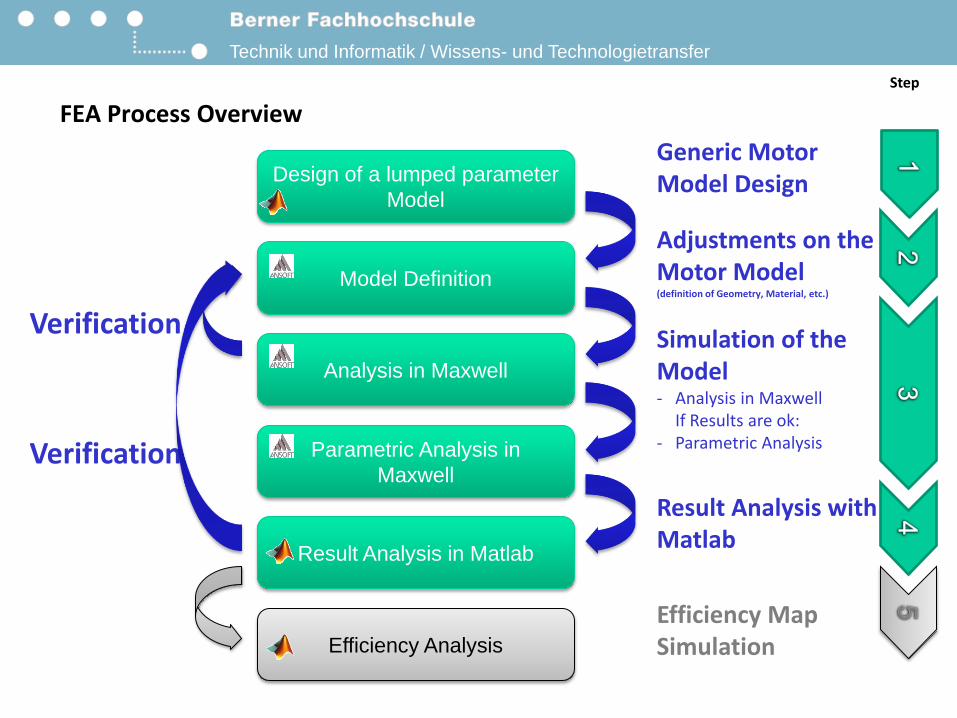
FEA Process Overview
Model Definition
Analysis in Maxwell
Parametric Analysis in
Maxwell
Verification
Adjustments on theMotor Model(definition of Geometry, Material, etc.)
Verification
Generic MotorModel Design
Step
Result Analysis in Matlab
Design of a lumped parameter
Model
Simulation of theModel- Analysis in Maxwell
If Results are ok:- Parametric Analysis
Result Analysis withMatlab
Efficiency Analysis
Efficiency MapSimulation
Technik und Informatik / Wissens- und Technologietransfer
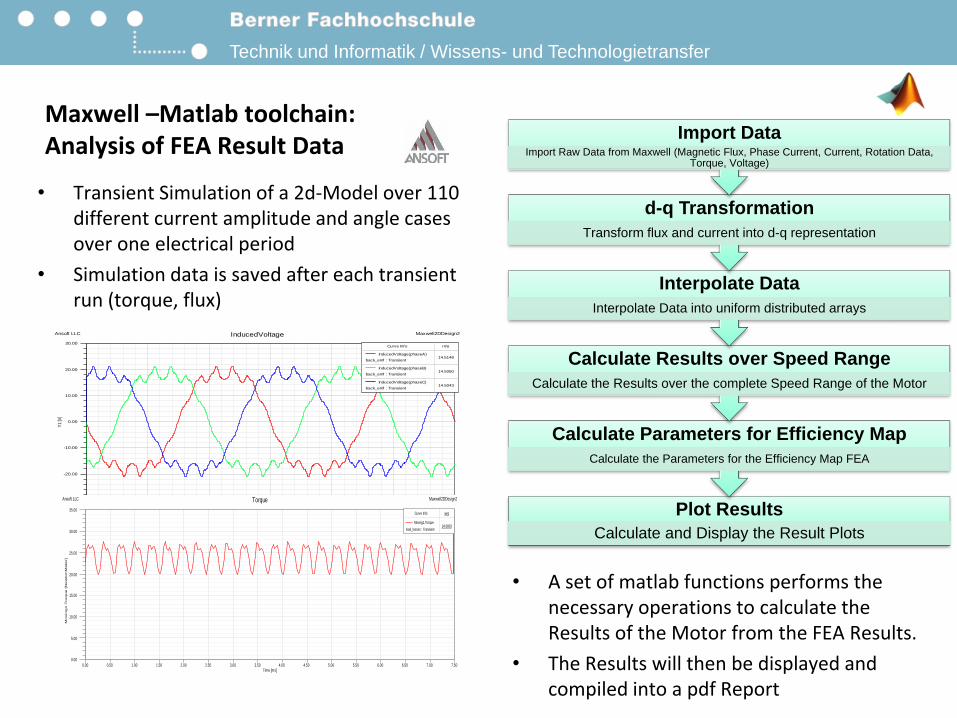
Maxwell –Matlab toolchain:Analysis of FEA Result Data
• A set of matlab functions performs the necessary operations to calculate the Results of the Motor from the FEA Results.
• The Results will then be displayed and compiled into a pdf Report
Plot Results
Calculate and Display the Result Plots
Calculate Parameters for Efficiency Map
Calculate the Parameters for the Efficiency Map FEA
Calculate Results over Speed Range
Calculate the Results over the complete Speed Range of the Motor
Interpolate Data
Interpolate Data into uniform distributed arrays
d-q Transformation
Transform flux and current into d-q representation
Import DataImport Raw Data from Maxwell (Magnetic Flux, Phase Current, Current, Rotation Data,
Torque, Voltage)
0.00 5.00 10.00 15.00 20.00 25.00 30.00
Time [ms]
-30.00
-20.00
-10.00
0.00
10.00
20.00
30.00
Y1
[V]
Ansoft LLC Maxwell2DDesign2InducedVoltage
Curve Info rms
InducedVoltage(phaseA)
back_emf : Transient14.5148
InducedVoltage(phaseB)
back_emf : Transient14.5050
InducedVoltage(phaseC)
back_emf : Transient14.5043
• Transient Simulation of a 2d-Model over 110 different current amplitude and angle cases over one electrical period
• Simulation data is saved after each transient run (torque, flux)
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
Mo
vin
g1
.To
rq
ue
[N
ew
ton
Me
ter]
Ansoft LLC Maxwell2DDesign2Torque
Curve Info avg
Moving1.Torque
load_losses : Transient24.0803
Technik und Informatik / Wissens- und Technologietransfer
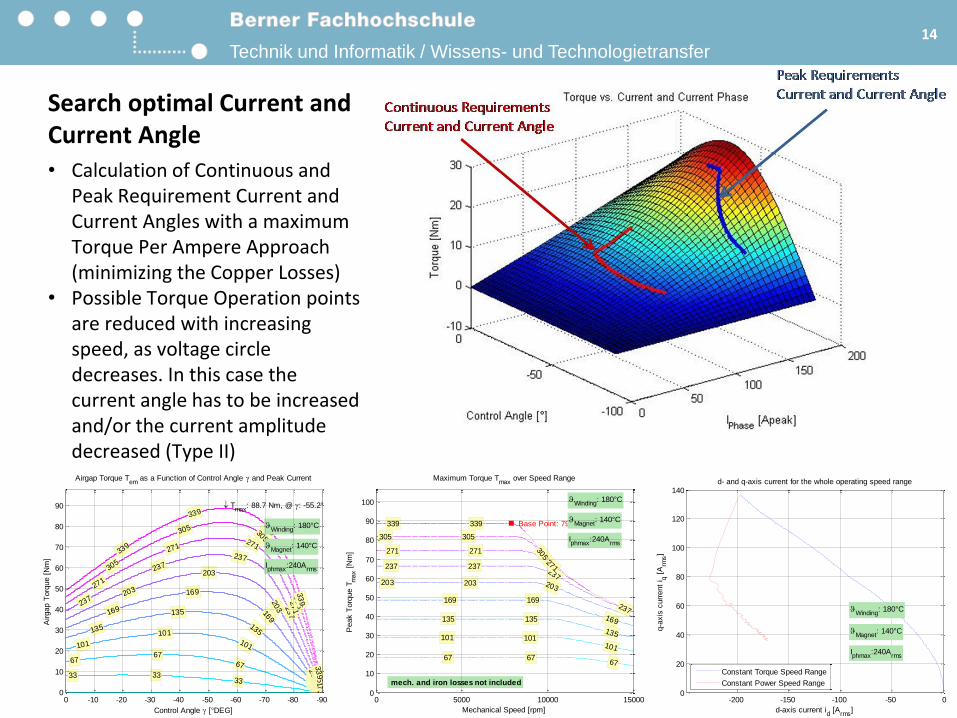
Search optimal Current andCurrent Angle
• Calculation of Continuous and Peak Requirement Current and Current Angles with a maximum Torque Per Ampere Approach (minimizing the Copper Losses)
• Possible Torque Operation points are reduced with increasing speed, as voltage circle decreases. In this case the current angle has to be increased and/or the current amplitude decreased (Type II)
14
33 3333
6767
67
67
101
101101
101
135
135
135
135
169
169
169
169
203
203
203
20
3
237
237
237
23
7
23
7
271
271271
27
1
27
1
305
305 305
30
5
30
5
339
339
339
33
9
33
9
Control Angle g [°DEG]
Airgap T
orq
ue [
Nm
]
Airgap Torque Tem
as a Function of Control Angle g and Peak Current
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
Tmax
: 88.7 Nm, @ g: -55.2°
-90-80-70-60-50-40-30-20-1000
10
20
30
40
50
60
70
80
90
67 6767
101 101101
135 135
135
169 169
169
203 203 203
237 237237
237
271
271271 305
305305
339339 Base Point: 7900 rpm
Mechanical Speed [rpm]
Peak T
orq
ue T
max [
Nm
]
Maximum Torque Tmax
over Speed Range
mech. and iron losses not included
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
0 5000 10000 150000
10
20
30
40
50
60
70
80
90
100
-200 -150 -100 -50 00
20
40
60
80
100
120
140
d-axis current id [A
rms]
q-a
xis
curr
ent
i q [
Arm
s]
d- and q-axis current for the whole operating speed range
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
Constant Torque Speed Range
Constant Power Speed Range
Technik und Informatik / Wissens- und Technologietransfer
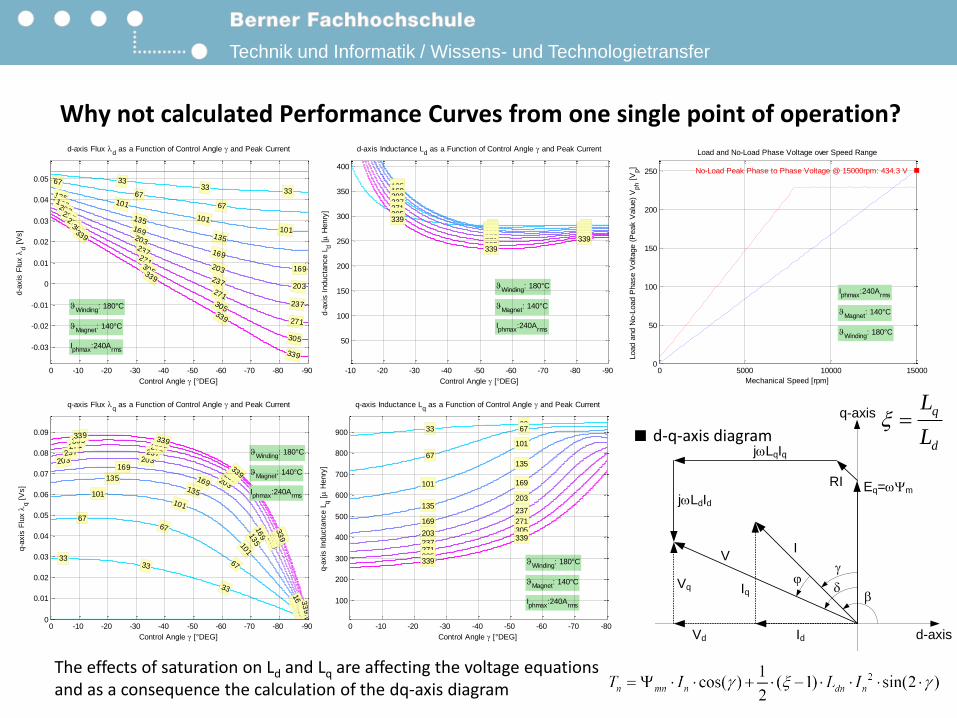
Why not calculated Performance Curves from one single point of operation?
3333
67
67
101
101
101
135
135
135
169
169
169
203
203
203
237
237
237
271
271
271
305
305
305
339
339
339
Control Angle g [°DEG]
q-a
xis
Inducta
nce L
q [
Henry
]
q-axis Inductance Lq as a Function of Control Angle g and Peak Current
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
-80-70-60-50-40-30-20-100
100
200
300
400
500
600
700
800
900
3333
33
33
6767
67
67
101101
101
101
135
135
135
135
169
169
169
169
203 203
203
20
3
20
3
237 237
237
23
7
23
7
271 271
271
27
1
27
1
305 305
305
30
5
30
5
339 339
339
33
9
33
9
Control Angle g [°DEG]
q-a
xis
Flu
x
q [
Vs]
q-axis Flux q as a Function of Control Angle g and Peak Current
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
-90-80-70-60-50-40-30-20-1000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
3333
33
67
67
67101
101
101
135
135
135
169
169
169
169
203
203
203
203
237
237
237
237
271
271
271
271
305
305
305
305
339
339
339
339
Control Angle g [°DEG]
d-a
xis
Flu
x
d [
Vs]
d-axis Flux d as a Function of Control Angle g and Peak Current
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
-90-80-70-60-50-40-30-20-100
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
33
33 33
67
67 67
101
101 101
135
135 135
169
169 169
203
203 203
237
237 237
271
271271
305
305305
339
339
339
Control Angle g [°DEG]
d-a
xis
Inducta
nce L
d [
Henry
]
d-axis Inductance Ld as a Function of Control Angle g and Peak Current
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
-90-80-70-60-50-40-30-20-10
50
100
150
200
250
300
350
400
0 5000 10000 150000
50
100
150
200
250 No-Load Peak Phase to Phase Voltage @ 15000rpm: 434.3 V
Mechanical Speed [rpm]
Load a
nd N
o-L
oad P
hase V
oltage (
Peak V
alu
e)
Vph [
Vp]
Load and No-Load Phase Voltage over Speed Range
Winding
: 180°C
Magnet
: 140°C
Iphmax
:240Arms
b
jwLdId
jwLqIq
Eq=wYm
Iq
IV
IdVd
Vq
RI
b
gj
q-axis
d-axis
d
d-q-axis diagram
q
d
L
L
The effects of saturation on Ld and Lq are affecting the voltage equations and as a consequence the calculation of the dq-axis diagram

Technik und Informatik / Wissens- und Technologietransfer
Efficiency Map
• Calculate Simulation Parameters forSimulation Points(Current, Current Angle, Rotation Speed, Simulation Time)
• Write Parameters as Variables intoMaxwellscript file for Simulation
• Simulation over at least two electricalperiods for each operation point in Maxwell
0 2000 4000 6000 8000 10000 12000 140000
5
10
15
20
25
30Points for efficency Parametric Analysis
Torq
ue [
Nm
]
Speed [rpm]
Maxiumum Requirements
Simulation Points
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Co
reL
oss [W
]
Ansoft LLC Maxwell2DDesign2CoreLoss
Curve Info avg max
CoreLoss
load_losses : Transient210.6362 238.0068
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
Y2
[W
b]
Ansoft LLC Maxwell2DDesign2FluxLinkage
Curve Info max
FluxLinkage(phaseB)
load_losses : Transient0.0523
FluxLinkage(phaseC)
load_losses : Transient0.0523
FluxLinkage(phaseA)
load_losses : Transient0.0523

Technik und Informatik / Wissens- und Technologietransfer
Core Loss Calculation
17
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.40 1.50
SPe
cifi
c C
ore
Lo
sse
s [W
/kg]
Induction Value [B]
Comparison of Maxwell Iron Loss Calculation with Measurement Data
Meas. 100Hz
Meas. 200Hz
Meas. 400Hz
Meas. 1000Hz
Meas. 2000Hz
Meas. 5000Hz
Meas. 10000Hz
100Hz
200Hz
400Hz
1000Hz
2000
5000
10000
Measured values as dots.Calculated lines are basedon Maxwell CoefficientsKh, Kc and Ke, which have beencalculated for each frequenceaccordingly.
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.40 1.50
SPe
cifi
c C
ore
Lo
sse
s [W
/kg]
Induction Value [B]
Comparison of Maxwell Iron Loss Calculation with Measurement Data
Meas. 100Hz
Meas. 200Hz
Meas. 400Hz
Meas. 1000Hz
Meas. 2000Hz
Meas. 5000Hz
Meas. 10000Hz
100Hz
200Hz
400Hz
1000Hz
2000Hz
5000Hz
10000Hz
Measured values as dots.Calculated lines are basedon Maxwell CoefficientsKh, Kc and Ke, which have beencalculated 100Hz data.
• Improvement of V12 by using multi-frequency data. Eliminates need to change data at each simulation step
• Maxwell uses dB/dt approach and not a fourier series Steinmetz based formula. This yields better results but requires at least two electrical periods of simulation data
Referenzpaper:D. Lin, P. Zhou, W. N. Fu, Z. Badics, and Z. J. Cendes: “A Dynamic Core Loss Model for Soft Ferromagnetic and Power Ferrite Materials in Transient Finite Element Analysis”
Technik und Informatik / Wissens- und Technologietransfer
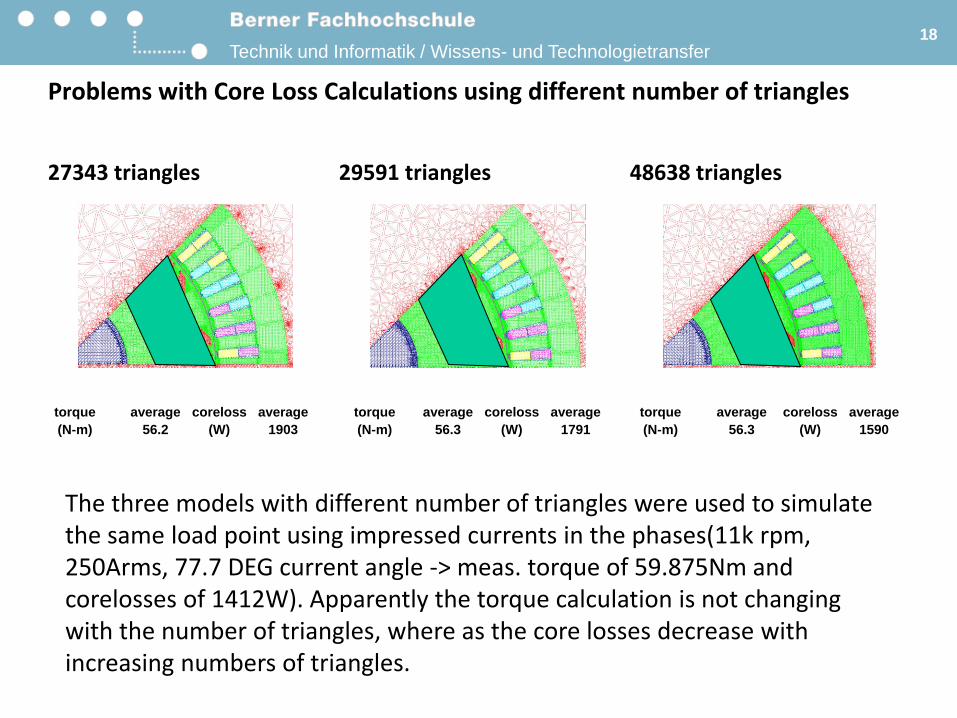
Problems with Core Loss Calculations using different number of triangles
27343 triangles
18
29591 triangles 48638 triangles
torque average coreloss average
(N-m) 56.2 (W) 1903
torque average coreloss average
(N-m) 56.3 (W) 1791
torque average coreloss average
(N-m) 56.3 (W) 1590
The three models with different number of triangles were used to simulate the same load point using impressed currents in the phases(11k rpm, 250Arms, 77.7 DEG current angle -> meas. torque of 59.875Nm and corelosses of 1412W). Apparently the torque calculation is not changing with the number of triangles, where as the core losses decrease with increasing numbers of triangles.

Technik und Informatik / Wissens- und Technologietransfer
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
2.20
2.40
Co
reL
oss [kW
]
Ansoft LLC Maxwell2DDesign2CoreLoss
Curve Info avg max
CoreLoss
current_model_losses : Transient0.2628 2.4395
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Co
reL
oss [W
]
Ansoft LLC Maxwell2DDesign2CoreLoss
Curve Info avg max
CoreLoss
load_losses : Transient210.6362 238.0068
Core Loss Calculation Methods• Impressed sinusoidal stator
currents
• Simplest Model, fast convergence
• Sinusoidal voltage supply and RL-parameter for winding
• long Convergence time
• Impressed PWM currents
• Taken from simulation data, good behavior, medium convergence (2 electrical periods), but needs high resolution
• Taken from measurement data for verification, needs treatment
• PWM voltage supply model
• Either in Maxwell or combined with Simplorer.
• Long simulation time, especially if mechanical model is used.
19
0.9 1 1.1 1.2 1.3 1.4 1.5 1.6
x 10-3
0
50
100
150
200
time [s]
pha
se
vo
ltag
e [
Vp]
phase voltage over electrical position
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
-600
-400
-200
0
200
400
600
Phase C
urr
ent
I p [
Ap]
Sampling Points []
P4 Phase Current measured at 5000rpm and 200Nm
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
-600
-400
-200
0
200
400
600
Phase C
urr
ent
I p [
Ap]
Sampling Points []
P4 Phase Current measured at 5000rpm and 200Nm
0 0.02 0.04 0.06 0.08 0.10
100
200
300
400
500
600
electrical position [°DEG electrical]
air
ga
p t
orq
ue
[N
m]
airgap torque over electrical position
Technik und Informatik / Wissens- und Technologietransfer
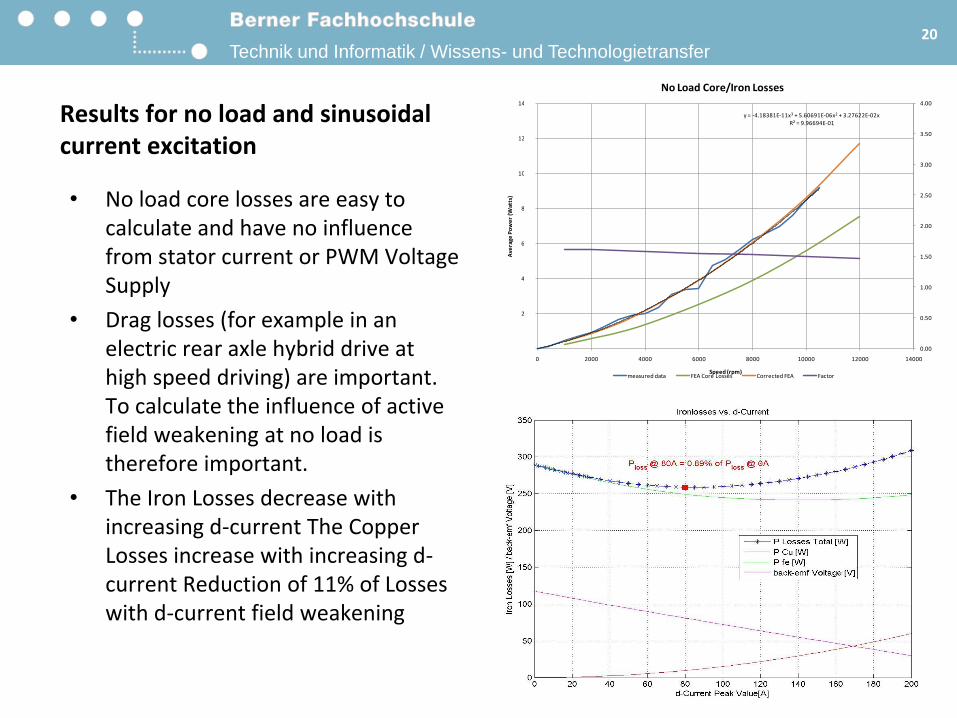
Results for no load and sinusoidal current excitation
20
y = -4.18381E-11x3 + 5.60691E-06x2 + 3.27622E-02xR² = 9.96694E-01
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
0
200
400
600
800
1000
1200
1400
0 2000 4000 6000 8000 10000 12000 14000
Ave
rage
Po
we
r (W
atts
)
Speed (rpm)
No Load Core/Iron Losses
measured data FEA Core Losses Corrected FEA Factor
• No load core losses are easy to calculate and have no influence from stator current or PWM Voltage Supply
• Drag losses (for example in an electric rear axle hybrid drive at high speed driving) are important. To calculate the influence of active field weakening at no load is therefore important.
• The Iron Losses decrease with increasing d-current The Copper Losses increase with increasing d-current Reduction of 11% of Losses with d-current field weakening
Technik und Informatik / Wissens- und Technologietransfer
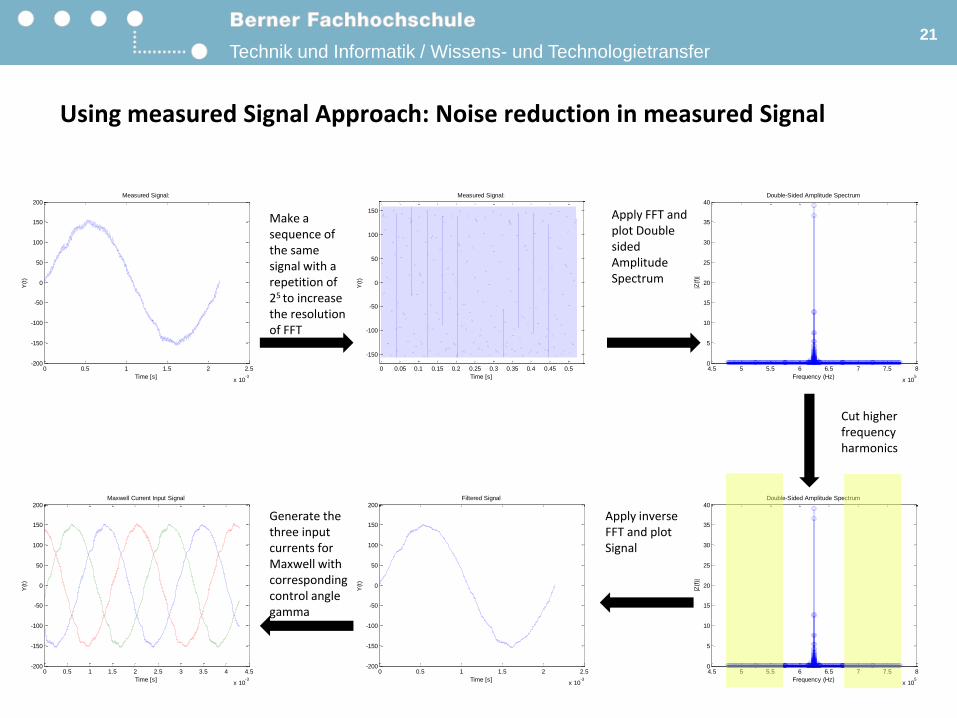
Using measured Signal Approach: Noise reduction in measured Signal
21
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-150
-100
-50
0
50
100
150
Measured Signal:
Time [s]
Y(t
)
0 0.5 1 1.5 2 2.5
x 10-3
-200
-150
-100
-50
0
50
100
150
200Measured Signal:
Time [s]
Y(t
)
Make a sequence of the same signal with a repetition of 25 to increase the resolution of FFT
4.5 5 5.5 6 6.5 7 7.5 8
x 105
0
5
10
15
20
25
30
35
40Double-Sided Amplitude Spectrum
Frequency (Hz)
|Z(f
)|
Apply FFT and plot Double sided Amplitude Spectrum
0 0.5 1 1.5 2 2.5
x 10-3
-200
-150
-100
-50
0
50
100
150
200Filtered Signal
Time [s]
Y(t
)
4.5 5 5.5 6 6.5 7 7.5 8
x 105
0
5
10
15
20
25
30
35
40Double-Sided Amplitude Spectrum
Frequency (Hz)
|Z(f
)|
Apply inverse FFT and plot Signal
Cut higher frequency harmonics
Generate the three input currents for Maxwell with corresponding control angle gamma
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 10-3
-200
-150
-100
-50
0
50
100
150
200Maxwell Current Input Signal
Time [s]
Y(t
)
Technik und Informatik / Wissens- und Technologietransfer
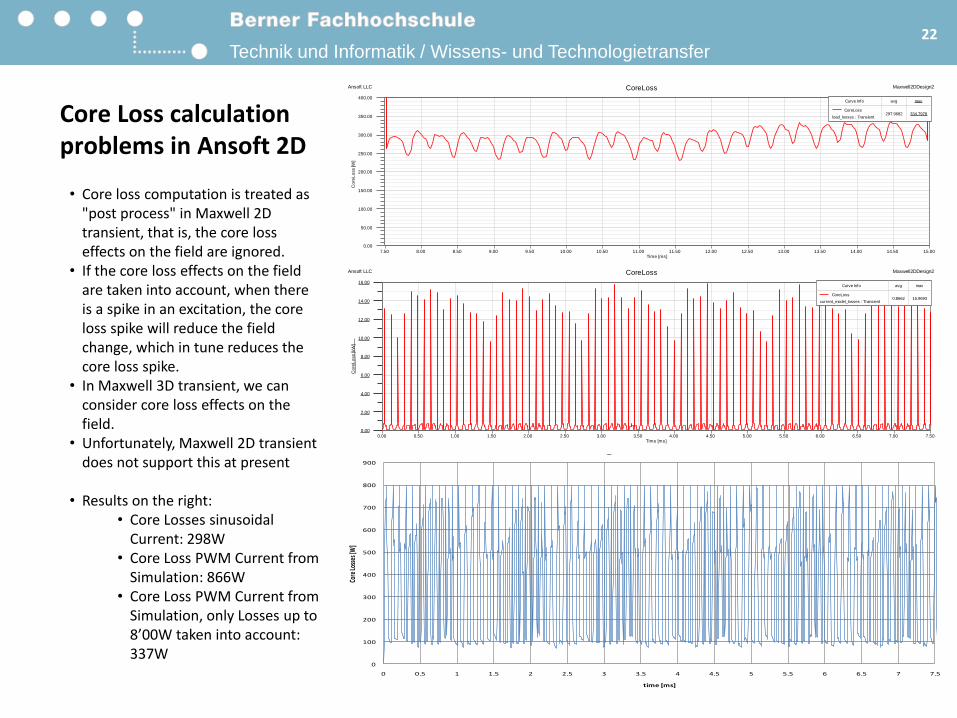
Core Loss calculation problems in Ansoft 2D
22
7.50 8.00 8.50 9.00 9.50 10.00 10.50 11.00 11.50 12.00 12.50 13.00 13.50 14.00 14.50 15.00Time [ms]
0.00
50.00
100.00
150.00
200.00
250.00
300.00
350.00
400.00
Co
reL
oss [W
]
Ansoft LLC Maxwell2DDesign2CoreLoss
Curve Info avg max
CoreLoss
load_losses : Transient297.9682 334.7978
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50Time [ms]
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
Co
reL
oss [kW
]
Ansoft LLC Maxwell2DDesign2CoreLoss
Curve Info avg max
CoreLoss
current_model_losses : Transient0.8662 15.9693
0
100
200
300
400
500
600
700
800
900
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5
Core
Loss
es [W
]
time [ms]
Core Losses: Proto II, 360V, 4‘000rpm, 60Nm
Average: 336.8352W
• Core loss computation is treated as "post process" in Maxwell 2D transient, that is, the core loss effects on the field are ignored.
• If the core loss effects on the field are taken into account, when there is a spike in an excitation, the core loss spike will reduce the field change, which in tune reduces the core loss spike.
• In Maxwell 3D transient, we can consider core loss effects on the field.
• Unfortunately, Maxwell 2D transient does not support this at present
• Results on the right:• Core Losses sinusoidal
Current: 298W• Core Loss PWM Current from
Simulation: 866W• Core Loss PWM Current from
Simulation, only Losses up to 8’00W taken into account: 337W
Technik und Informatik / Wissens- und Technologietransfer
Conclusions
• Influence of PWM Supply on core losses is an important factor for the efficiency calculation of the motor as all of today's motor are based on PWM supply. In fully optimized systems efficiency gains in the motor due to higher PWM are optimized versus the higher switching losses in the Inverter.
• Iron Loss Calculation becomes an important task in the motor simulation process due to need for efficiency map calculation and optimization over the whole torque and speed range
• Computational Capabilities are still somehow limited and are based on manufacturer data with limited reliability due to old measurement setups. Manufacturer should modify test equipment to include higher frequencies and additional rotational losses
• Motor designers are used to 2D simulations to limit simulation time, fully transient simulation including taking into account the influence of eddy currents on the magnetic field should be therefore brought to Maxwell 2D as fast as possible
23

Technik und Informatik / Wissens- und Technologietransfer
MITRACPermanent Magnet Motor
• Environmentally sound use of resources
• Energy costs per Light Rail Vehicle about
40‘000 $US/year (~50t LRV)
• Energy costs per Metro train about
200‘000 $US/year (~230t train)
• Tested and validated, the solution’s innovative motor construction is based on internal permanent magnet technology. It uses a rotor to create its own flux by incorporating magnets. The MITRAC Internal Permanent Magnet Motor meets the highest demands on drive systems for traction application.
• Bombardier recently tested the MITRACPermanent Magnet Motor in Sweden. Bombardier replaced four forced air-cooled induction motors in the BOMBARDIER REGINAwith two of the PM motors as part of the GrönaTåget (“Green Train”) project.
• The successful tests confirmed that a reduction of two induction motors could be achieved while still providing the same performance for the REGINA train.
Left: Forced air-cooled Regina induction motor. Right: Permanent Magnet Motor prototype tested on Regina summer 2008.
Technik und Informatik / Wissens- und Technologietransfer
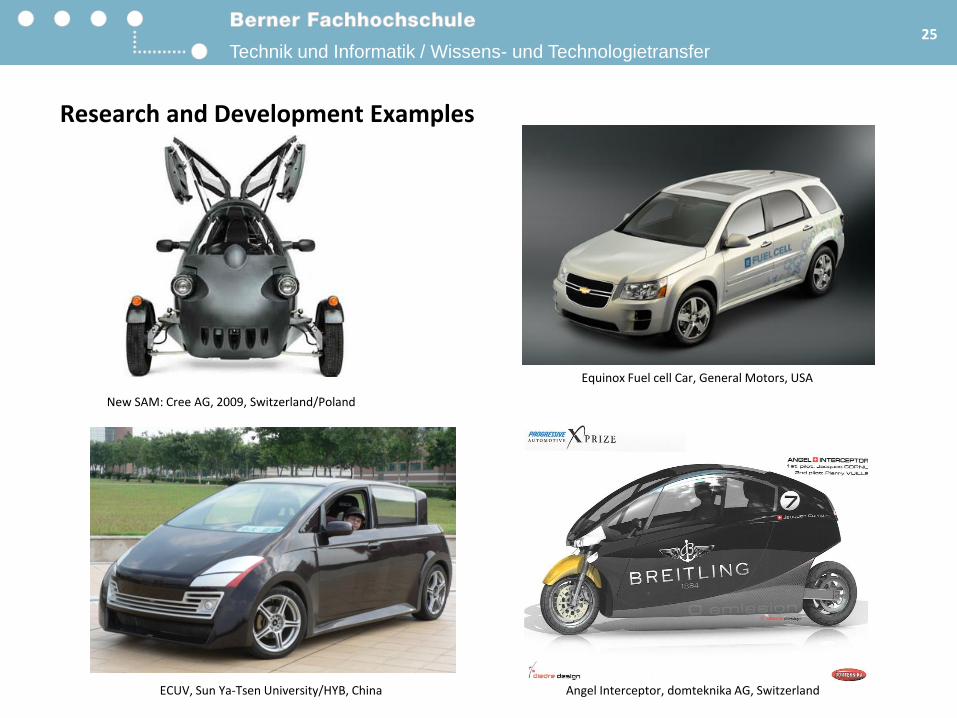
Research and Development Examples
25
New SAM: Cree AG, 2009, Switzerland/Poland
Equinox Fuel cell Car, General Motors, USA
ECUV, Sun Ya-Tsen University/HYB, China Angel Interceptor, domteknika AG, Switzerland
Technik und Informatik / Wissens- und Technologietransfer
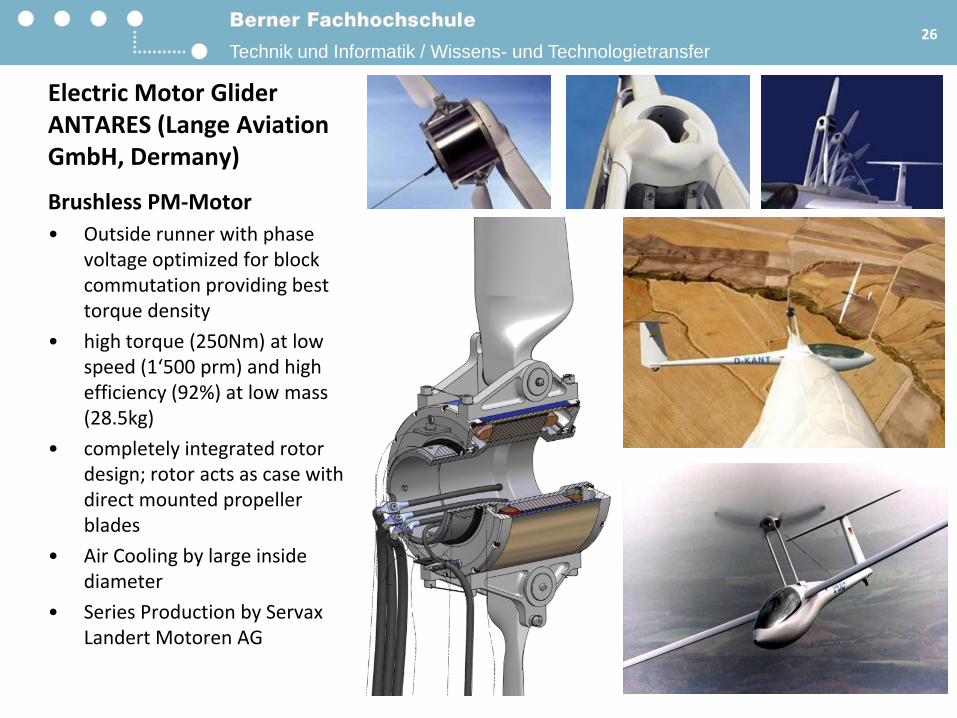
Electric Motor GliderANTARES (Lange AviationGmbH, Dermany)
Brushless PM-Motor
• Outside runner with phase voltage optimized for block commutation providing best torque density
• high torque (250Nm) at low speed (1‘500 prm) and high efficiency (92%) at low mass (28.5kg)
• completely integrated rotor design; rotor acts as case with direct mounted propeller blades
• Air Cooling by large inside diameter
• Series Production by ServaxLandert Motoren AG
26
Technik und Informatik / Wissens- und Technologietransfer
Thank you very much for your attention
Dr. Andrea Vezzini
Laboratory for Industrial Electronics
Berne University of Applied Sciences
Tf.: +41 32 321 63 72
Fax: +41 32 321 65 72
email: [email protected]
Internet: www.ti.bfh.ch
27



















![Index [link.springer.com]978-3-642-56255-6/1.pdf · Index a-iron single crystal 334 a-iron 328 I'-ray spectrometry 61 56Fe 206 57Fe 206 74Ge+ 207 ab initio calculation 361 ab initio](https://img.dokumen.tips/doc/110x75/5e1798fef79fd45181586885/index-link-978-3-642-56255-61pdf-index-a-iron-single-crystal-334-a-iron.jpg)









