Embed Size (px)
Citation preview

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 1 -
Irányítási rendszerek megvalósítása
Irányítási rendszerek megvalósítása
Dr. Soumelidis Alexandrosegy. docens
Dr. Soumelidis Alexandrosegy. docens
Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben
Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 2 -
MérésAdatgyűjtés
Beavatkozás
Irányítás
Detektálás
Kommunikáció
Rendszer

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 3 -
u+ DA Beavatkozó P Mérő /
Érzékelő AD–
C
Irányítási rendszerekIrányítási rendszerek
Digitális irányítási séma
y
Numerikus algoritmus

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 4 -
u+ DA P Mérő /
Érzékelő AD–
C
Irányítási rendszerekIrányítási rendszerek
Digitális irányítási séma (variáns)
y
Numerikus algoritmus
Beavat-kozó

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 5 -
Irányító egység:beágyazott számítógép
Irányítási séma:numerikus algoritmus
Beágyazott irányítási sémaBeágyazott irányítási séma
A D
y1(t)
A D
A D
y2(t)
yp(t)
z1(t)
z2(t)
……..
zp(t)
D A
D A
D A
v1(t)
v2(t)
vm(t)
u1(t)
u2(t)
um(t)
Rendszerállapotx1(t) x2(t) … xn(t)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 6 -
Beágyazott számítástechnikaBeágyazott számítástechnika
• Számítógép architektúra – általános séma
• A specifikus funkcionalitást a szoftvervalósítja meg.
CPU PROGRAM- és ADAT- MEMÓRIA
P P
CPU PROGRAM- MEMÓRIA P ADAT-
MEMÓRIA
Neumann és Harvard architektúra
Univerzális elrendezés algoritmizálható problémák megoldására.

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 7 -
Beágyazott rendszerek maBeágyazott rendszerek ma• A gyártott mikroprocesszorok 90%-a beágyazott
alkalmazásban kerül felhasználásra.• Beágyazott rendszerek mindenütt:
4: processzor (Texas Instruments), 6: RAM 8 MB, 7: flash memória
Netgear ADSL modem/router:
Mai modern gépjárművek:50-100 beágyazott számítógép: ECU
üzemanyagellátásABS/ASR
Mobiltelefonok:
Alapsávi processzor

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 8 -
Beágyazott rendszerek fejlesztéseBeágyazott rendszerek fejlesztése
• Komponensek
• Fejlesztőeszközök
• Módszerek
• Mikrovezérlők, mikroszámítógépek• Memória elemek – statikus/dinamikus RAM, flash• Periféria áramkörök – interfész, tárolás, kommunikáció
• Tervezés, prototípus előállítás, mérés, tesztelés• Hardver-, szoftver- és rendszerfejlesztési eszközök
• Alapfeladatok, algoritmusok• Rendszerrealizálási módszerek• Módszertani fejlesztés

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 9 -
Beágyazott rendszerek komponensei
Beágyazott rendszerek komponensei
• Mikrovezérlők – 8-16-32 bites egységek saját adat- és programmemóriával, perifériakészlettel
• Mikroszámítógépek – 32-64 bites egységek belső ás külső memória és periféria meghajtó képességgel
• Digitális jelfeldolgozó processzorok (DSPk) – speciális utasításkészlettel kiegészített mikrovezérlők
• Speciális feldolgozó elemek – kommunikációs processzorok, hang- és képfeldolgozó processzorok
• Programozható logikai tömbök – FPGA – szoft-processzorok
•Számítógép komponensek

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 10 -
Mikroszámítógép családokMikroszámítógép családok
• Számítógép architektúra központi egységének egy áramköri lapkán megvalósított formája
Mikroprocesszorok
• 8-bites: 8080 (1974)
• 16-bites: 8086 (1978)
• 32-bites: I386 (1985), I486 (1989), Pentium (1993)
• 64-bites: Athlon 64 (2003), Intel Core 2 (2006)
Példa: IntelIntel486-DX2
ma: quad core

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 11 -
Mikroszámítógép családokMikroszámítógép családok
• Teljes számítógép architektúra megvalósítása egy áramköri lapkán
Mikrovezérlők
Harward architektúra
CPU PROGRAM- MEMÓRIA P ADAT-
MEMÓRIA
• Egyszerű 8-16-bites CPU (RISC)
• Belső RAM és programmemória
• Belső perifériakészlet: • időzítők, PWM• parallel digitális I/O: port-ok• soros interfészek: SPI, I2C, UART• hálózat: CAN, USB, Ethernet• Analóg I: AD, komparátor

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 12 -
Mikroszámítógép családokMikroszámítógép családok
• Teljes számítógép architektúra megvalósítása egy áramköri lapkán
Mikroszámítógépek
Neumann architektúra
• Egyszerű 32-bites CPU (RISC)• Kiegészítő külső RAM és „flash” memória• Direkt memória hozzáférés (DMA)• Lebegőpontos műveleti támogatás• IDE, PCI, memóriakártya interfészek• Kóderek/dekóderek: MP3, AES titkosítás• Digitális jelfeldolgozási műveletek (DSP)
CPU PROGRAM- és ADAT- MEMÓRIA
P P
Példák:
ARM
PowerPC
DSP (TI, AD)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 13 -
Beágyazott rendszerek komponenseiBeágyazott rendszerek komponensei
• Nem felejtő memóriák: ROM – maszkprogramozott, PROM – egyszer programozhatóEPROM – törölhető, újraprogramozható
ma leginkább flash memóriákelektronikusan nagyon sokszor újraprogramozhatóprogramtárolásra (Harward architektúra)adattárolásra: adatgyűjtés, archiválás
• RAM memóriák:statikus
kis méretű gyors memóriák átmeneti tárolásra
dinamikus adattárolásra (Harward architektúra)program- és adattárolásra (Neumann architektúra)
•Memória elemek

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 14 -
Beágyazott rendszerek komponenseiBeágyazott rendszerek komponensei
• Interfész áramkörök: •Periféria áramkörök
• Analóg jelinterfészek: AD és DA konverterek• Logikai jelinterfészek: digitális I/O• Fizikai jelinterfészek: érzékelők, mérőeszközök, relék,
motorok, különböző fizikai elveken alapuló beavatkozó szervek• Kommunikációs interfészek: vezetékes és vezeték nélküli soros
vagy hálózati interfészek• Adattároló eszközök:
• Mágneses tároló eszközök: keménylemezes diszkek• Optikai tároló eszközök: CD, DVD• Félvezető tároló eszközök: multimédia, SD memória kártyák
• Kommunikációs eszközök: • Vezetékes hálózatok: Ethernet, CAN, FlexRay• Vezeték nélküli hálózatok: WLAN, ZigBee

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 15 -
Beágyazott rendszerek fejlesztőeszközei: hardver
Beágyazott rendszerek fejlesztőeszközei: hardver
•Kiindulópont:
• Modul szint
• Integrált áramköri szint
• Áramköri szint• FPGA realizációk• Félvezető lapka tervezés

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 16 -
Beágyazott rendszerek fejlesztőeszközei: hardver
Beágyazott rendszerek fejlesztőeszközei: hardver
• Hardver fejlesztő rendszerek:
• Rendszerszintű fejlesztő eszközök: rendszer specifikáló, konfiguráló eszközök, rendszerszintű teszt, validációs és verifikációs eszközök
• Áramkör és NYÁK tervező eszközök: elvi kapcsolási rajz szintű áramkörtervező és szimulációs, nyomtatott áramkörtervező eszközök
• Integrált áramköri lapka tervező eszközök: elvi kapcsolás, modul vagy tranzisztor szintű tervező, szimulációs és verifikációs eszközök

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 17 -
Beágyazott rendszerek fejlesztőeszközei: szoftver
Beágyazott rendszerek fejlesztőeszközei: szoftver
•Szoftver és rendszerszintű fejlesztő rendszerek: • Alacsony szintű fejlesztőeszközök: assemblerek,
letöltő programok, kódszintű hibakereső programok
• Magas szintű programozási nyelvek: compiler, forrás-szintű debugger programok
C, C++, C# compilerek, Eclipse környezet
• Magas szintű rendszerfejlesztési eszközök: szimbolikus, grafikus programgenerálási környezetek, rendszer konfigurációs eszközök
Matlab/Simulink (Mathworks)LabView (National Instruments)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 18 -
Beágyazott szoftver fejlesztésBeágyazott szoftver fejlesztés

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 19 -
Irányítási rendszerekIrányítási rendszerekPélda: inverz inga
kis szögekre: linearizálás

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 20 -
Példa: inverz ingaPélda: inverz inga
z
u
x
-K
u = -Kx
-K ux [z,] State observer
[zs,s]
Controller
(s = 0)
[z,]
Állapot-visszacsatolás Állapot-visszacsatolás megfigyelővel

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 21 -
Példa: inverz ingaPélda: inverz ingaDiszkretizálás
Diszkrét idejű irányítási algoritmus
A D A
D
u x yti j
tj j
t
jj
n
1
2
1
Control algorithm
i n12, ,...
x x yit
ij jt
j
n
ij jt
j
1
1 1
2
y(t) yt ut u(t)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 22 -
Példa: inverz ingaPélda: inverz ingaMegvalósítás
A/D D/A
z
u
egy „klasszikus” számítógépes realizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 23 -
Példa: inverz ingaPélda: inverz ingaMegvalósítás
A/D
z
u
PWM
egy „modern” beágyazott realizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 24 -
x(t)
t
x(t)
t
ss T
f 1
x(t)
t
T
Ts
0 1 2 3 4 5 6
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Aliasing hatás f és 9f frekvenciájú színuszjel között
• Energiakorlátos jel• Sávkorlátozott jel - fB
Bs ff 2• „Aliasing” hiba• „Anti-aliasing” szűrő
Analóg – Digitális konverzióAnalóg – Digitális konverzióMintavételi törvény (Shannon)
mintavételezés és kvantálás

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 25 -
Analóg – Digitális konverzióAnalóg – Digitális konverzióx(t)
t
T t
T
dttuT
U0
)(1
Analógbemenet Kimenet
1-bites kvantálóIntegrátor
x tm
x t y t+-
x td
+Xmax
-Xmax
x ti
δσ-modulációs ADC
Integráló típusú (dual-slope) ADC
Szukcesszív approximációs (SAR) ADC

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 26 -
Diszkrét idejű dinamikus rendszerDiszkrét idejű dinamikus rendszer

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 27 -
Diszkrét idejű dinamikus rendszerDiszkrét idejű dinamikus rendszer

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 28 -
Diszkrét idejű dinamikus rendszerDiszkrét idejű dinamikus rendszer

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 29 -
Diszkrét idejű dinamikus rendszerDiszkrét idejű dinamikus rendszer

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 30 -
DiszkretizációDiszkretizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 31 -
DiszkretizációDiszkretizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 32 -
DiszkretizációDiszkretizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 33 -
DiszkretizációDiszkretizáció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 34 -
Diszkrét idejű rendszer stabilitásaDiszkrét idejű rendszer stabilitása

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 35 -
Diszkrét idejű szabályozóDiszkrét idejű szabályozóPélda: PID szabályozó
Diszkretizáció:
Folytonos PID szabályozó
Jelölések:

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 36 -
Diszkrét PID szabályozóDiszkrét PID szabályozóGyakorlatban alkalmazható forma: rekurzív alak
A végső forma:

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 37 -
Diszkrét PID szabályozóDiszkrét PID szabályozó
Speciális esetként τD=0 választásával diszkrét PI:
A diszkrét PID és PI alkalmazása:
• yk kiszámítása yk-1, xk és xk-1 ismeretében T-vel ütemezett ciklusokban
• Ügyelni kell az algoritmus a véges számábrázolás hatásából eredő nemlineáris hatásokra → „anti-windup”
• Figyelembe kell venni a beavatkozó szervek véges működési tartományát.

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 38 -
Szabályozók beágyazott realizálásaSzabályozók beágyazott realizálása
A szabályozási algoritmus számítógépes program formájában valósul meg. Formái (példák – a teljesség igénye nélkül):
• Natív lineáris program fix időzítéssel.• Megszakításokkal vezérelt natív program.• Operációs rendszer alatt futó program.• Valós idejű operációs rendszer alatt futó konkurrens program.• Valósidejű parallel (többszálú) és konkurrens program.• Elosztott programrealizáció (konkurrens és parallel).• Digitális kommunikációs hálózaton alapuló elosztott realizáció
(konkurrens és parallel).• Nagy megbízhatóságú redundáns és/vagy diverz realizáció.

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 39 -
Szabályozók beágyazott realizálásaSzabályozók beágyazott realizálásaMegszakítás (interrupt)
• Külső esemény megszakítja a program futását, egy megszakítási eljárás zajlik le, majd visszatér a végrehajtás az eredeti programra.
• Többszintű, prioritásos megszakítási rendszer, akár egymást is megszakító folyamatok.
• A megszakítások egységes kezelése: valós idejű (real-time) ütemező, kernel vagy operációs rendszer.
Megszakítás források:
• Külső és belső perifériák (pl. időzítő, ütemező, adatszolgáltató vagy kommunikációs egységek).
• Külső események (digitális jelek változása, állapotjelek, hibajelek, analóg jelek szintátmenete, zérusátmenet).

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 40 -
Szabályozók beágyazott realizálásaSzabályozók beágyazott realizálásaOperációs rendszer
• A programok elindulását, leállását, a perifériakezelést, a rendszerkezelés tipikus folyamatait összefoglaló programrendszer.
• A programozó az operációs rendszer kezelő eljárásain keresztül programozza a perifériákat, a hardver részletek közömbössé válnak.
• Magas szintű nyelvek, grafikus környezetek, magas szintű kommunikációs protokollok alkalmazása
Beágyazott operációs rendszerek (példák):
• Linux• Android• iOS
• Beágyazott Windows• WinCE

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 41 -
Szabályozók beágyazott realizálásaSzabályozók beágyazott realizálásaValós idejű (real-time) rendszerek
• Konkurrens folyamatok, valós vagy virtuális parallelitás, eseményvezéreltség.
• Holtpont: ha két vagy több folyamat egymásra vár – akár közvetetten is. A holtpontmentes vezérlés alapkövetelmény.
• Folyamatok ütemezése, a futási időkülönbségek kiegyenlítése: FIFO tárolók, cirkuláris pufferek, szemaforok, mutex-ek.
• A holtpontmentesség biztosítása: primitív utasítások, kölcsönös kizárás.
Primitív utasítások: megszakíthatatlan, egy menetben lezajló folyamategység (gépi utasítások, interrupt tiltás).
Szemafor: jelzés, amelyek korlátozza a folyamatokat valamilyen programszakaszba való belépésben - várakoztatás.
Mutex: bináris szemafor – kölcsönös kizárás egy folyamatra nézve

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 42 -
Szabályozók beágyazott realizálásaSzabályozók beágyazott realizálásaNagy megbízhatóságú rendszerek
• Redundancia: azonos funkciók többszörözése, és szavazás –hármas redundancia és 3-ból 2-es szavazás tipikus
• Diverzitás: a redundancián belül egy funkciót több különböző elven realizálunk – különböző fizikai elvek, algoritmus, HW és SW realizáció.
Példák:
• Hármas redundancia a mérésekben (pl. 3 független IMU egység, Pitot-cső, stb).
• Osztott vezérfelületek (csűrők, magassági- és oldalkormány) külön szervo vezérléssel.
• Több hajtómű, egyszeres meghibásodás nem okoz problémát.• Hajtás és vezérfelületek különböző kombinációi helyettesítik
egymást.

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 43 -
Digitális – Analóg konverzióDigitális – Analóg konverzióA Shannon törvény szerinti rekonstrukció :
k B
B
kTtfkTtfkTxtx
22sin • Egzakt rekonstrukció a gyakorlatban
nem valósítható meg• A gyakorlat számára túl komplikált
0-rendű tartószerv: approximáció lépcsős függvénnyel
1-rendű tartószerv: lineáris interpoláció
3-rendű splineinterpoláció:

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 44 -
Digitális – Analóg konverzióDigitális – Analóg konverzió
Klasszikus DA konverter:
Megvalósítja a 0-rendű tartószervet (ZOH – zero-order hold)
ellenállás-létrahálózat

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 45 -
Digitális – Analóg konverzióDigitális – Analóg konverzió
N-rendű tartó közelítő megvalósítása a gyakorlatban:
LP szűrő
A 0-rendű tartó kimeneti jelének „simítása”.
LP – Low Pass - alulátersztő

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 46 -
Digitális – Analóg konverzióDigitális – Analóg konverzióA klasszikus DAC problémái:
• Nagy teljesítményű beavatkozó szervek (motorok, elektromágnesek) meghajtása analóg végerősítőket igényel
• A, B, AB és C osztályú végerősítők: alacsony hatásfok, nagy hődisszipáció
• Kimeneti teljesítmény korlátozott (néhány kW).

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 47 -
Digitális – Analóg konverzióDigitális – Analóg konverzió
Megoldás:
• Kapcsolóüzemű megoldások
• D-osztályú végerősítő
• Impulzusszélesség moduláció –PWM – Pulse-Width Modulation

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 48 -
Kapcsolóüzemű működési elvKapcsolóüzemű működési elvBE- és KI-kapcsolás – kétállapotú rendszer:• Megfelel a digitális működési elveknek• Nagy hatásfok, kis teljesítményveszteség és hő-
disszipáció• Egyszerű megvalósítás félvezető eszközökkel:
• tranzisztorok• MOS FET-ek• IGBT-k – Insulated-Gate Bipolar Transistor
BEKI

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 49 -
PWM – Pulse Width ModulationPWM – Pulse Width Modulation
T
)(0 txTp )(1 TtxTp )2(2 TtxTp
)( kTtxTpk
PWM: az impulzusszélesség arányos a mintaértékekkel.
Impulzusszélesség – moduláció

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 50 -
PWM – Pulse Width ModulationPWM – Pulse Width Modulation
T
)(0 txTp )(1 TtxTp )2(2 TtxTp
)( kTtxTpk
Fázishelyes PWM: szimmetrikus impulzusok a korrekt időpontokban.

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 51 -
PWM – Pulse Width ModulationPWM – Pulse Width Modulation
Aluláteresztő (LP) szűréssel (1-rendű RC szűrő):

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 52 -
PWM – Pulse Width ModulationPWM – Pulse Width Modulation
Az analóg jel közelítő visszaállítása:
aluláteresztő (LP) szűrés
• Torzítás – a hordozó frekvencia nem tűnik el nyomtalanul.
• Pontatlanság az interpolációban.• Késleltetés, fáziskésés.
Gondos tervezéssel a gyakorlati alkalmazások szempontjából elegendő pontosság érhető el.
LP szűrés: sok esetben az aktuátorok maguk realizálják –az elektromechanikus elemek lassú dinamikájúak.
Hibák:

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 53 -
Elektromechanikus aktuátorokElektromechanikus aktuátorok• Elektromágneses beavatkozó szervek• Elektromos motorok
• DC (Direct Current) motor – egyenáramú motor• BLDC (Brushless DC) motor – kefenélküli
egyenáramú motor• AC (Alternating Current) motor – indukciós
motor, szinkron motor, aszinkron motor• Léptető motor
További (nem mechanikus) aktuátorokTovábbi (nem mechanikus) aktuátorok• Fűtő (hőközlő) eszközök• Világító (fényemittáló) eszközök

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 54 -
Példa: DC motorPélda: DC motor
Tm
m
U
KR
Um
m
UKm
+Vp
H1 H2
H3 H4
+
-
Ø

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 55 -
Pozíció szervó irányításPozíció szervó irányítás
Motor
Potmeter
10
10
10
16
50
62
35 41
278.031251
889732
4116
3510
5010
6210
Futaba S3003 servo
Φ(t)U(t)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 56 -
Pozíció szervó irányításPozíció szervó irányítás
+Vp
H1 H2
H3 H4
+
-
Ø
τ1 τ2 τ3 τ4 τ5 τ6 τ7τ0
U
t 0
Up
Tp 2Tp 3Tp 4Tp 5Tp 6Tp 7Tp
φ(t) u(t) Ur(t)
H-híd PWM

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 57 -
TC44
28(S
O8/
MSO
P8)
TC44
28(S
O8/
MSO
P8)
DC motorvezérlő: H-hídDC motorvezérlő: H-híd

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 58 -
DIR
PWM
R210 kΩ0603
R110 kΩ0603
CN1-5
UL
LL
UR
LR
2
1
4
1
2
4
1
2
4
1
2
4
U374HC1G00SOT23-5
U474HC1G00SOT23-5
U674HC1G02SOT23-5
U8-2
U8-4
U7-2
U7-4
U574HC1G02SOT23-5
R30 Ω 0603
CN1-6
C81 µF0603
C71 µF0603
VDD
3
5 55 5
3 3 3
DC motorvezérlő: logikaDC motorvezérlő: logika
• DIR – irány – L=előre H=hátra• PWM – az impulzusszélességgel arányos motorteljesítmény

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 59 -
DC motorvezérlő: mérésDC motorvezérlő: mérés
• EMF (Electro-Motive Force) – indukált feszültség – a fordulatszámmal arányos
• Motoráram – a nyomatékkal arányos

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 60 -
DC motorvezérlő: szögmérésDC motorvezérlő: szögmérés
Potméter helyett:forgó mágneses jeladó
AS
5045
SSO
P16

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 61 -
DC motorvezérlő: µC példaDC motorvezérlő: µC példa
ATM
ELA
Tmeg
a32M
1

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 62 -
Professzionális szervóProfesszionális szervó
Elektro-hidraulikus szervó
Elektromechanikus szervó
(lineáris)
(forgó)
oldalkormány hajtás (Boeing)

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 63 -
Példa: BLDC motorPélda: BLDC motor
N S
A120° 120°
120°
VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
3-phase inverter
C B
Kefe nélküli egyenáramú (BLDC – Brushless DC) motor

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 64 -
Brushless DC (BLDC) MotorBrushless DC (BLDC) Motor
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 65 -
Phase 1- start -Phase 1- start -
A
C B
Phase 1 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 66 -
A
C B
Phase 1 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 1- stop -Phase 1- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 67 -
A
C B
Phase 2 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 2- start -Phase 2- start -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 68 -
A
C B
Phase 2 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 2- stop -Phase 2- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 69 -
A
C B
Phase 3 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 3- start -Phase 3- start -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 70 -
A
C B
Phase 3 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 3- stop -Phase 3- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 71 -
A
C B
Phase 4 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 4- start -Phase 4- start -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 72 -
A
C B
Phase 4 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 4- stop -Phase 4- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 73 -
A
C B
Phase 5 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 5- start -Phase 5- start -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 74 -
A
C B
Phase 5 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 5- stop -Phase 5- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 75 -
A
C B
Phase 6 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 6- start -Phase 6- start -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 76 -
A
C B
Phase 6 VDC
SWAU SWBU SWCU
SWAL SWBL SWCL
Phase 6- stop -Phase 6- stop -
Phase A
Phase B
Phase C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
30° 90° 150° 210° 270° 330° 0° 360°

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 77 -
BLDC motorirányítás BLDC motorirányítás
BLDC vezérlő elektronika:
• Szenzor nélküli vezérlés• Visszacsatolás EMF mérés alapján• N-csatornás MOSFET kapcsolók• Félhíd meghajtó IC-k alkalmazása
U4IRF7311
1
3,7,8
2
5,6
4
U1
C1220 nF 0805
U
Vcc
Vcc
BINP
TINP
TG
TS
BG
BOOST
GND
3
1
2
7
8
4
9
6NC
5
D1BAS16LT1
C41 µF0805
1 3
U5IRF7311
1
3,7,8
2
5,6
4
U1
C2220 nF 0805
Vcc
BINP
TINP
TG
TS
BG
BOOST
GND
3
1
2
7
8
4
9
6NC
5
D2BAS16LT1
C51 µF0805
1 3
U6IRF7311
1
3,7,8
2
5,6
4
U1
C3220 nF 0805
Vcc
BINP
TINP
TG
TS
BG
BOOST
GND
3
1
2
7
8
4
9
6NC
5
D3BAS16LT1
C61 µF0805
1 3
V
W
V
U
W
GND
VCC
Wh
Wl
Vh
Vl
Uh
Ul
CN1-2
CN1-3
CN1-3
CN1-4
CN1-5
CN1-6
CN1-10
N
CN1-11
We
W
V
U
R118 kΩ 1%
0603
R224 kΩ 1%
0603
C74.7 nF0603
R418 kΩ 1%
0603
R524 kΩ 1%
0603
C84.7 nF0603
R718 kΩ 1%
0603
R824 kΩ 1%
0603
C94.7 nF0603
R322 kΩ 1%
0603
R622 kΩ 1%
0603
R922 kΩ 1%
0603
CN1-9
Ve
Ue
CN1-12
Pole A
Pole B
Pole C
Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6
60° 120° 240° 180° 300° 0° 360°
SW AU
SW AL
SW BU
SW BL
SW CU
SW CL

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 78 -
Beágyazott járműirányító rendszer Beágyazott járműirányító rendszer
Fedélzeti Számítógép
Gyorsulás- érzékelő
Giro- érzékelő
Nyomás- érzékelő
Hőmérs.- érzékelő
Gyorsulás- érzékelő Gyorsulás-
érzékelő
Giro- érzékelő Giro-
érzékelő
Nyomás- érzékelő Nyomás-
érzékelő
Hőmérs.- érzékelő Hőmérs.-
érzékelő
GPS
Szervo Szervo Szervo
Elektro- mágn. v. Elektro-
mágn. v. Elektro- mágn. v.
Telj. vezérlő Telj.
vezérlő Telj. vezérlő
User IF
Kommunikációs rendszer
Video feldolg.
KAMERA
μC < ADC LAN
μC < H LAN
Többszintű irányítás:
• Járműcsoport irányítás• Jármű-környezet
kapcsolaton alapuló irányítás
• Járműszintű irányítás

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 79 -
UAV irányításUAV irányítás

BME Közlekedés- és Járműmérnöki KarKözlekedés- és Járműirányítási Tanszék
Dr. Soumelidis Alexandros, Automatikus Fedélzeti Irányító Rendszerek a Légiközlekedésben, 2015 - 80 -
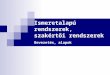
4-rotoros helikopter irányítás4-rotoros helikopter irányítás
Thrust
Pitch
Yaw
Roll
Wireless
Communication
Motor
Control
Motor
Control
Motor
Control
Motor
Control
Global Position
Sensing
Sensors
Inertial, magnetic, US
Power Supply
Control
Main Control
Unit
CAN network
Elosztott irányítás:• Önálló processzorokat
tartalmazó részegységek• CAN hálózati kommunikáció a
részegységek között