Embed Size (px)
Citation preview

Inverse problem in hydrogeology
Jesffls Carrera · Andr�s Alcolea · Agust�n Medina ·Juan Hidalgo · Luit J. Slooten
Abstract The state of the groundwater inverse problem issynthesized. Emphasis is placed on aquifer characteriza-tion, where modelers have to deal with conceptual modeluncertainty (notably spatial and temporal variability),scale dependence, many types of unknown parameters(transmissivity, recharge, boundary conditions, etc.),nonlinearity, and often low sensitivity of state variables(typically heads and concentrations) to aquifer properties.Because of these difficulties, calibration cannot be sepa-rated from the modeling process, as it is sometimes donein other fields. Instead, it should be viewed as one step inthe process of understanding aquifer behavior. In fact, it isshown that actual parameter estimation methods do notdiffer from each other in the essence, though they maydiffer in the computational details. It is argued that thereis ample room for improvement in groundwater inversion:development of user-friendly codes, accommodation ofvariability through geostatistics, incorporation of geo-logical information and different types of data (tempera-ture, occurrence and concentration of isotopes, age, etc.),proper accounting of uncertainty, etc. Despite this, evenwith existing codes, automatic calibration facilitatesenormously the task of modeling. Therefore, it is con-tended that its use should become standard practice.
R�sum� L’�tat du probl�me inverse des eaux souter-raines est synth�tis�. L’accent est plac� sur la caract�ri-sation de l’aquif�re, o� les mod�lisateurs doivent joueravec l’incertitude des mod�les conceptuels (notamment lavariabilit� spatiale et temporelle), les facteurs d’�chelle,plusieurs inconnues sur diff�rents param�tres (transmis-sivit�, recharge, conditions aux limites, etc.), la non li-n�arit�, et souvent la sensibilit� de plusieurs variables
d’�tat (charges hydrauliques, concentrations) des pro-pri�t�s de l’aquif�re. A cause de ces difficult�s, le cali-brage ne peut Þtre s�par� du processus de mod�lisation,comme c’est le cas dans d’autres cas de figure. Par ail-leurs, il peut Þtre vu comme une des �tapes dans le pro-cessus de d�termination du comportement de l’aquif�re. Ilest montr� que les m�thodes d’�valuation des param�tresactuels ne diff�rent pas si ce n’est dans les d�tails descalculs informatiques. Il est montr� qu’il existe une largepanoplie de techniques d ‹inversion : codes de calculutilisables par tout-un-chacun, accommodation de la va-riabilit� via la g�ostatistique, incorporation d’informa-tions g�ologiques et de diff�rents types de donn�es(temp�rature, occurrence, concentration en isotopes, �ge,etc.), d�termination de l’incertitude. Vu ces d�veloppe-ments, la calibration automatique facilite �norm�ment lamod�lisation. Par ailleurs, il est souhaitable que son uti-lisation devienne une pratique standardis�e.
Resumen Se sintetiza el estado del problema inverso enaguas subterr�neas. El �nfasis se ubica en la caracteriza-ci�n de acu�feros, donde los modeladores tienen que en-frentar la incertidumbre del modelo conceptual (princi-palmente variabilidad temporal y espacial), dependenciade escala, muchos tipos de par�metros desconocidos(transmisividad, recarga, condiciones limitantes, etc), nolinealidad, y frecuentemente baja sensibilidad de varia-bles de estado (t�picamente presiones y concentraciones) alas propiedades del acu�fero. Debido a estas dificultades,no puede separarse la calibraci�n de los procesos demodelado, como frecuentemente se hace en otros campos.En su lugar, debe de visualizarse como un paso en elproceso de entendimiento del comportamiento del acu�-fero. En realidad, se muestra que los m�todos reales deestimaci�n de par�metros no difieren uno del otro en loesencial, aunque s� pueden diferir en los detalles com-putacionales. Se discute que existe amplio espacio para lamejora del problema inverso en aguas subterr�neas: des-arrollo de c�digos amigables al usuario, acomodamientode variabilidad a trav�s de geoestad�stica, incorporaci�nde informaci�n geol�gica y diferentes tipos de datos(temperatura, presencia y concentraci�n de is�topos,edad, etc), explicaci�n apropiada de incertidumbre, etc. Apesar de esto, affln con los c�digos existentes, la calibra-ci�n autom�tica facilita enormemente la tarea de mode-
Received: 10 June 2004 / Accepted: 2 November 2004Published online: 25 February 2005
Springer-Verlag 2005
J. Carrera ()) · A. Alcolea · A. Medina · J. Hidalgo · L. J. SlootenSchool of Civil Engineering,Technical University of Catalonia,1-3, Jordi Girona Street, Building D2, 08034 Barcelona, Spaine-mail: [email protected].: +34-93-4016890Fax: +34-93-4017251
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

lado. Por lo tanto, se sostiene que su uso deber�a deconvertirse en pr�ctica standard.
Keywords Inverse problem · Aquifer · Groundwater ·Modeling · Parameter estimation
Introduction
In broad terms, inverse modeling refers to the process ofgathering information about the model from measure-ments of what is being modeled. This includes two relatedconcepts: model identification and parameter estimation.The latter will be used here as being synonymous withcalibration. Model identification applies to methods tofind the nature (features) of the model, such as the gov-erning equations, boundary conditions, time regime, orheterogeneity patterns. Parameter estimation, instead, isrestricted to assigning values to the properties character-izing those features.
The above definitions apply to groundwater modellingwithout much modification. In fact, it can be argued thatsome sort of inversion has always been standard practicein hydrogeology. For example, hydrogeologists performpumping tests to characterize aquifers. These tests areinterpreted by, first, identifying the most appropriatemodel (on the basis of actual measurements and geology)and, then, estimating model parameters by curve fitting.This can be facilitated by automatic procedures, whichhave become rather standard in fields where analyticalsolutions are scarce, such as the unsaturated zone (Kooland Parker 1988; Hollenbeck and Jensen 1998). Auto-matic calibration has also become standard in fieldswhere appropriate tests can be performed to characterizespatial variability: medicine, where it is termed “scan-ning” or “tomography” (Rudin et al. 1999; Rhli et al.2002); geophysics (Sambridge and Mosegaard 2002); andmany others. However, groundwater modeling displaysseveral peculiarities that collectively sets it apart frommodeling in other fields:
– Cost. Groundwater models are relatively expensive torun. They require building large systems of equations(to get an accurate and realistic picture of the system)that need to be solved for each model run. In addition,advances in computer science are used to increase thequality of the model performance rather than to reduceexecution times.
– Time dependence. State variables such as heads andconcentrations are time dependent. Many flow prob-lems are essentially under steady state conditions. Yet,even in this case, the information might be containedin temporal fluctuations of heads, thus deservingtransient modeling.
– Heterogeneity. Values of hydraulic conductivity, K,which is often the most dominant hydraulic property,may vary over several orders of magnitude. The samecan be said about transmissivity, which is essentiallyequivalent to K in 2D models (hereinafter transmis-
sivity and hydraulic conductivity will be used inter-changeably).
– Different types of parameters. While efforts are oftenconcentrated on transmissivity, other parameters (re-charge, boundary fluxes, etc.) may be equally uncer-tain and relevant.
– Scale dependence. Parameters measured in the fieldoften represent a small portion of the aquifer. As aresult, they are qualitative and quantitatively differentfrom what is needed in the model.
– Model uncertainty. Geometry of the aquifer and het-erogeneity patterns are controlled by the geology,which is never known accurately.
– Low sensitivity. Depending on the problem, statevariables may display low sensitivity to model pa-rameters (i.e. their information content is low). Inparticular, heads (the most frequent and sometimesunique type of measurement) sometimes contain littleinformation about hydraulic conductivity.
Because of the above features, the aquifer model predic-tions are highly uncertain. Moreover, parameter estima-tion cannot be formulated as clearly as in other fields.That is possible for pumping test interpretation, whereone can indeed take heads straight from the test, enterthem in a code and derive parameter values after amoderately qualitative model analysis. In aquifers, one isforced to cast inversion as one step of the modelingprocess. Many of these features are shared by ground-water’s sister science, surface water hydrology, wheremany of these issues also have been addressed (Beven1993; Gupta et al. 1999).
Another consequence of the singularities of ground-water inversion is its relative isolation. Many inversionmethods have been developed independently from thosein other fields. The earliest methods were based on simplysubstituting heads, assumed to be known, into the flowequation, which leads to a first order partial differentialequation in transmissivity (Stallman 1956). This method,termed “direct” by Neuman (1973), is relatively simple tounderstand and has been widely used after Nelson (1960,1961). In fact, it allowed deriving transmissivities fromflow nets based on head measurements (Bennet andMeyer 1952). Unfortunately, this approach has severaldrawbacks. First, it requires knowing heads (and recharge,storage coefficient and boundary conditions) over thewhole domain in space and time. This can only beachieved through interpolation, which introducessmoothing and errors, so that the estimated transmissivityvalues become somewhat artificial. Second, it is unstable(small errors in heads cause large errors in transmissivi-ty). To overcome the first problem, most recent inversionmethods use what Neuman (1973) termed the indirectapproach, which consists of acknowledging that mea-surements contain errors and finding the hydraulic prop-erties that minimize these errors. That is, parameters arefound by minimizing an objective function, which maybecome a huge computational task. To overcome insta-bilities, a number of approaches can be taken: adding a
207
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

regularization term to the objective function to dampenunwarranted oscillations, considering additional types ofdata, reducing the number of parameters to be estimatedwithout losing the ability to reproduce spatial variability,etc. These issues (computation, stabilization, differenttypes of data, spatial variability) have remained the focusof much research. Reviews of them are presented by Yeh(1986), Carrera (1987), Kool et al. (1987), McLaughlinand Townley (1996) and de Marsily et al. (1999).Therefore, a thorough review of the state of the art inaquifer modeling inversion would be superfluous.
In this context, the objective of this paper is to describethe current state of inverse modeling for aquifer charac-terization. Emphasis is placed on seeking similarities ofexisting methods and on discussing how they are used,rather than describing them exhaustively. It is argued that
calibration should be viewed as a necessary step inmodeling and the paper is structured to mimic the mod-eling process (Fig. 1). The following section of this paperis devoted to outlining the roles of knowledge and data inthe definition of the conceptual model, arguably the mostfrequent source of errors in groundwater modeling (Bre-dehoeft 2004). Methods for representing aquifer proper-ties in terms of a hopefully small number of unknowns tobe optimized (the so called model parameters) are pre-sented in the section entitled “What is to be estimated?”.The next natural step is to optimize (calibrate) the valueof the model parameters. Actual calibration methods andcodes are presented in the sections, “How to estimate themodel parameters, p”; and “How codes work”. Once theparameters have been obtained, one needs to check thequality of the resulting model, which is addressed in the
Fig. 1 Schematic representa-tion of the modeling process(the Aznalc�llar site, Castro etal. 1999). Step 1. All availableinformation about the real sys-tem is collected and used todefine the plausible conceptualmodels (M1, M2, M3, etc.).Step 2. Conceptual models areexpressed in terms of governingequations (in the inset, T istransmissivity, h head and qrepresents sink and sourceterms; color patterns in M1,M2, M3 differentiate differentgeological formations). Step 3.These equations are discretizedand solved in a finite set ofpoints (in the inset, a is theconductance matrix and h and bare vectors containing headsand sink/source terms). Also,unknown hydraulic properties(i.e. areal recharge) are dis-cretized as a function of a set ofmodel parameters p. Step 4.These model parameters areoptimized in such a way that (1)a good fit between calculated(red line) and measured data(blue dots) is obtained and (2)derived hydraulic properties are“plausible”. Step 5. Error anal-ysis must be performed and, ifneeded, some of the initialconceptual models can be dis-missed through new experi-ments. Otherwise, the model isoperative
208
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

section entitled, “How good is the model?”. Actual ap-plication trends are discussed in the section entitled,“What is actually done?”. The paper ends with a discus-sion on future challenges.
The conceptual model: knowledge and data
Knowledge and data are the basis of the conceptualmodel, which represents what is going to be actuallymodeled. Knowledge and data concepts have been de-fined in many different ways. An often encountered pointof view is that “knowledge” consists in beliefs about re-ality. In science and philosophy it is of concern whetherbeliefs are justifiable and true. In this view, only if beliefsare justifiable and true are they deemed knowledge. Theterm “data” is used here to mean all the pieces of infor-mation about the aquifer, not only hard numbers formeasurements in the field.
As shown in Fig. 1, groundwater models are based ongeneric scientific knowledge on the behavior of ground-water and site specific data. This leads to a site specificunderstanding, which can be expressed in terms ofmathematical equations. These equations are often ma-nipulated to get a set of discretized equations that can besolved numerically.
Data are used not only to define qualitatively theconceptual model, but also to define it quantitatively.Table 1 displays some of the types of data and the rolethey play in modeling. They can be classified according toseveral criteria. One distinction can be made betweenqualitative (“soft”) and quantitative (“hard”) data. An-other distinction can be stated considering their temporalbehavior: static data refer to quantities that remain con-stant in time while dynamic data relate to quantities thatchange in time. A third distinction can be made betweendata about the parameters to be estimated and measure-ments of state variables (heads, fluxes, etc.).
Quantitative data are acquired through measurements,which contain errors. Therefore, a probability density
function (hereinafter referred to as pdf) should be usedinstead of single values to define measurements. AGaussian distribution is often used, both because it hasbeen proven to suitably describe many variables (e.g. log-transmissivity, hereinafter referred to as log-T) and be-cause it can be fully described by the mean and thestandard deviation. Given the ease of use of this distri-bution, data that do not follow a Gaussian pdf are oftentransformed so that the resulting pdf is close to Gaussian(e.g. transmissivity). This is a frequent source of errors,because the fact that point values of log-T follow aGaussian distribution does not imply that the spatial dis-tribution is multigaussian (G�mez-Hern�ndez and Wen1998). In fact, the opposite can often be argued (Meier etal. 1999). Yet, the multigaussian feature of log-T is themost frequent assumption in hydrogeology. Geostatisticalsoftware may be used to generate alternative spatial dis-tributions, for example using Markov-chain methods(Weissmann et al. 1999).
Transformations of raw measurements of state vari-ables may also be appropriate to increase the sensitivity ofdata to parameters. This topic has received a lot of at-tention in surface water hydrology (Meixner et al. 1999).A groundwater example of this trend is to use the totalobserved mass at an outflow point instead of individualconcentration values when modeling a breakthroughcurve. Peak concentration and peak time can also be used(e.g. Woodbury and Rubin 2000). The same can beachieved by using different types of data or by employingan adequate weighting scheme (see, e.g. Wagner andGorelick 1987 and Anderman and Hill 1999). Concerningthe use of different data types, the information content ofdata is problem dependent, so that it is difficult to givegeneral rules. Including flow rate data in the calibrationimproves sensitivity to transmissivity (Larocque et al.1999). Temperature data can be informative of verticalfluxes (Woodbury et al. 1987). Environmental isotopesand age data may be informative about regional flowtrends (Varni and Carrera 1998). Chen et al. (2003) usedsubsidence rates to help in the estimation of permeabilityof aquitards. Streamflow gains and losses were used byHill (1992) to help in model calibration. In short a widerange of state variables can be used.
Data can be incorporated into the inversion procedurein different ways. Most of them can be summarized byconsidering a vector w containing both observations ofstate variables, h, and model parameters, p:
w ¼h
p
!¼
h�
p�
!þ
�h
�p
!ð1Þ
where h and p represent true values, h*and p* representmeasurements (or appropriate transformations; p* isusually termed “prior estimate”), and �h and �p representserrors. It is reasonable to assume that, a priori, errors inmeasurements of state variables are independent of errorsin those of parameters. In fact, it is often reasonable toassume that all measurement errors are independent.Dependence between data arises as a result of the
Table 1 Classification of the types of data commonly used inhydrogeology
Type Example Use
Knowledge Darcy’s law validity,dimensionality, B.C.’s, etc
Governingequations
SOFT DATAQualitative Geology (heterogeneity) ParameterizationQuantitative(indirect)
GeophysicsRemote sensingGrain size analysisMeasurement errordistribution
Calibration
HARD DATAQuantitative Pumping test Prior Informa-
tionTracer testHeads Calibration,
validationConcentrationsof chemical constituentsOther measurements
209
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

abovementioned transformations. This is particularly truefor model parameters, where measurements never coin-cide exactly with what is needed for the model. In order toobtain p*, one should use all available data about theparameters, such as point measurements of the parame-ters, soft data (e.g. a geophysical image), or the like. Allthese measurements are contained in a data vector zp.Then, using zp, the prior estimation and covariance matrixof p can be written as a generalization of the linearconditional expectation equation:
p� ¼ E pjzp
� �¼ EðpÞ þQpzeQ�1
zze zp � E zp
� �� �ð2Þ
Cp ¼ E ðp� p�Þðp� p�Þtjzp
� �¼ Qpp �QpzeQ�1
zzeQtpze
ð3Þwhere Qpp, Qzze, and Qpze are respectively the (co)vari-ances of model parameters, of measurements in zp, andcross-covariances between model parameters and mea-surements in zp and E[·] stands for expected value. Inpractice, the way in which these matrices are evaluateddepends on the nature of p and of zp. If zp represents pointmeasurements, then the components of Qzze are obtainedfrom the covariance function (i.e., Qzze would be thesimple kriging matrix). In such a case, Qpze would also begiven by the covariance function, possibly averaged if prepresents block values of log-T. If the prior expectationsof p, E(p), and zp, E zp
� �, are not known, then one may
need to extend these matrices to impose unbiasednessconditions (hence the subindex e). Moreover, if zp in-cludes not only point measurements but also soft data,then the correlation among them should be included inQzze, which would then become the cokriging matrix.Estimating cross covariances is difficult, so that one mayinstead prefer to use universal kriging, kriging with anexternal drift or other forms of non-stationary kriging. Itis clear that computing these matrices can be technicallycomplex. Details can be found in geostatistics texts (e.g.,Kitanidis 1997; Rubin 2003). A step-by-step descriptionof how to handle increasingly large sets of different typesof data is provided by Carrera et al. (1993a). However,regardless of the details on how these matrices are built,two issues should be clear:
– Virtually all types of data on both state variables andmodel parameters can be accommodated, except datathat are strictly qualitative (such as geological de-scriptions).
– Statistical descriptions of these data are needed toproperly weigh them in the inversion.
The meaning of p in Eqs. (1), (2) and (3) has gone pur-posefully undefined. This is the subject of the next sec-tion.
What is to be estimated?
The coefficients in the governing equations (see Fig. 1)are the hydraulic properties, whose value is to be esti-mated. Regardless of their scalar or tensorial character, allof them vary in space and some of them may vary in timeas well. To obtain the value of the hydraulic properties atevery point of a continuous model domain is impossible.Therefore, a discrete representation is required. The pro-cess of expressing hydraulic properties in terms of ahopefully small number of model parameters (unknownsto be found during the inversion process) is termed pa-rameterization.
Choosing the set of model parameters is not easy.Modelers may tend to use many degrees of freedom to getan accurate description of variability. However, if thenumber of model parameters is large, inverse problemsmay become ill-posed (Hadamard 1902). Therefore, acompromise is needed, which is the motivation of pa-rameterization methods. Most of them express aquiferproperties as linear combinations of the unknown modelparameters (those to be estimated). That is, any hydraulicproperty q (e.g., areal recharge) can be written as:
qðx; tÞ ¼ q0ðx; tÞ þ SNi¼1pi � aq
i ðx; tÞ ð4ÞHere, N is the number of model parameters pi, q0(x) is
an additive factor of the hydraulic property (e.g. the initialvalue if initial model parameters are zero) and aq
i ðx; tÞ areinterpolation functions used to parameterize areal re-charge in space and time. Discretization allows one towrite Eq. (4) in matrix form
q ¼ q0 þ Aqp ð5Þwhere Aq is a matrix containing the areal recharge in-terpolation functions and p a vector containing the modelparameters. Thus, parameterization methods are definedin terms of: (1) an estimation of the model parameters p,(2) an interpolation method that describes the way matrixA is calculated, and (3) an initial distribution of the hy-draulic property q0. Parameterization methods differ inthe way in which these vectors and matrices are defined.The most widely used are outlined below.
ZonationParameterization is accomplished by partitioning the do-main in a set of subdomains (zones). Typically, eachcomponent of the vector of model parameters, pi, is as-sociated to one subdomain. Within each of them, prop-erties q(x) are assumed constant or prescribed to vary in apredefined manner and the value of the interpolationfunction in Eq. (4) is zero if point x falls outside the zonebeing considered.
Often, time and space variability are decoupled (Car-rera and Neuman 1986a), so that
q ¼ ðx; tÞ ¼ pi f xðxÞf tðtÞ ð6Þwhere fx is a spatial function (e.g., fx may be aquiferthickness if pi represents hydraulic conductivity of thezone and q is transmissivity) and ft is a time function (e.g.
210
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

ft may represent time varying recharge obtained by massbalance in the soil and pi would be an unknown factor if qis areal recharge).
The main advantage of zonation is its generality andflexibility to accommodate the geological information(e.g., zones may represent geological units or portions ofthem). It should be stressed, however, that zonation doesnot preclude the use of geostatistics. In fact, Clifton andNeuman (1982) used zonation coupled to kriging.
While the zones need not be large, the original spirit ofzonation is to reduce the dimension of p, while ensuringgeological consistency (Stallman 1956). In fact, Carrera etal. (1993b) argue that, when available, geological infor-mation about parameter variability is so compelling (inthe sense that it can be included deterministically) that itovercomes the advantages of conventional geostatistics.Zonation is sometimes criticized as rigid. Hence, it is notsurprising that efforts have been made to optimize thegeometry of zones. A particularly appealing one is “ge-omorphing” where the geometry of zones is derivedduring the calibration process (Roggero and Hu 1998).
Point estimationIt can be viewed as the limiting case of zonation, as thesize of zones tends to zero (actually, to the element or cellsize). The formalism of Eq. (4) can still be used (e.g.Meier et al. 2001). However, the dimension of the pa-rameter space becomes so large that it may be more ap-propriate to seek alternative formulations (Kitanidis andVomvoris 1983; Dagan 1985; McLaughlin and Townley1996). These will be outlined in the next section.
Heuristic interpolation functionsThe interpolation functions ai in Eq. (4) can be chosenarbitrarily. Different types have been chosen, includingfinite elements (Yeh and Yoon 1981), Ridge functions(Mantoglou 2003), or others. These approaches offersignificant flexibility, but it is not clear how to defineprior information on model parameters.
Pilot pointsIn this case, p represents the unknown values of theproperty q at a set of (pilot) points. The method, originallydevised by de Marsily et al. (1984), has become verypopular (e.g. Ramarao et al. 1995; Vesselinov et al. 2001;Hernandez et al. 2003), to the point of becoming thestandard for non-linear geostatistical inversion. It can beconsidered as a generalization of Eq. (4) for the case inwhich measurements at the pilot points are uncertain. Inthis case, Eq. (4) can be written as:
qðxÞ ¼ SdimðzpÞi¼1 lzp
i ðxÞzpi þ SNj¼1l
PPj ðxÞpj ð7Þ
where lzpi and lPP
i are the (co-) kriging weights for mea-surements and pilot points, respectively. Comparing Eqs.(7) and (4), it is clear that q0 is the first term on the righthand side and aq
i ðx; tÞ are equal to lPPi ðxÞ. The main ad-
vantage of the method is its relative ease and flexibility.Surprisingly, it has not been until 2004 that the need to
account for prior information on the parameters has beenrecognized. Traditionally, direct measurements were usedfor the first term in Eq. (7), but were disregarded duringthe inversion process. Doherty (2003) includes a regu-larization criterion penalizing non-homogeneity of themodel parameters and he does not use prior information.Recently, Kowalsky et al. (2004) used a plausibility termfor the first time in the context of the pilot points method,but the role of this term is not explored.
Conditional simulationMethods described so far are implicitly based on seekingsome sort of optimal estimation. As will be seen in sub-sequent sections, it is sometimes preferable to seekequally likely simulations of q(x, t). Neuman andWierenga (2003) present a comprehensive strategy in thecontext of simulation. Alternatives that have been usedinclude the self calibration approach of Sahuquillo et al.(1992), G�mez-Hern�ndez et al. (1997) and Capilla et al.(1998), in which q0(x) represents a simulation of the log-Tfield conditioned by all (soft and hard) available infor-mation and the terms ai (x, t)pi represent perturbationsimposed by a set of master points. Another possibility isto express q(x) as a linear combination of random func-tions (Roggero and Hu 1998; Hu 2002), where ai
0s re-present conditional simulations and the model parametersare simply weights of those simulations.
In summary, first, a representation of the variability ofthe hydraulic properties is necessary and, second, themost common parameterization schemes can be writtenusing Eq. (4) or, in spite of their quite different appear-ance. The question now is how to find p.
How to estimate the model parameters, p
The estimation problem deals with the concept of “best”set of model parameters. A good question is what does“best” exactly mean? There is no perfect answer to thisquestion. In fact, there may not be a single set of modelparameters leading to a “good” representation of reality,which motivates conditional simulation methods G�mez-Hern�ndez et al. (1997) that aim at finding a collection ofequally probable parameters sets. Following is a de-scription of the most widely used methods.
Optimization methodsIn these methods, the parameter set is defined as theminimum of an objective function. Originally, the ob-jective function was motivated toward ensuring a goodmatch between computed and measured data (model fit).This agreement (performance criterion in this case) can bemeasured as the squared difference between computedand measured heads. This squared difference is, inmathematical terms, a norm (called L2 norm). However,other norms are available and some have been used ingroundwater. For example, errors can be quantified as theabsolute value of the difference between measured andcomputed values (L1 norm). Each norm has its own ad-
211
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

vantages: the L2 norm is more sensitive to outliers thanL1, which is more difficult to work with than the L2 norm(see Woodbury et al. (1987) for details and Xiang et al.(1992) for an application to modeling). Defining a per-formance criterion leads naturally to a minimizationproblem, i.e., to seek the model parameters that make thechosen norm minimum. Using the L2 norm, the objectivefunction to be minimized can be written as
Fh ¼ ðh� h�ÞtC�1h ðh� h�Þ ð8Þ
where C�1h is a matrix of weights. When Fh is used as
objective function, the problem often becomes ill-posed.The solution becomes unstable, i.e. different parametersets lead to very similar values of Fh. Sometimes, this isshown as extreme sensitivity to initial parameters, whichprompts modelers to argue that the solution is non-unique.To overcome these problems, some researchers tend to setupper and lower bounds on estimated parameters. In it-self, this does not solve the problem. The solution simplyfluctuates between those (arbitrary) bounds, but its reli-ability is not improved. This prompted Neuman (1973) toadd a plausibility term, Fp, to the objective function:
F ¼ Fh þ lFp ð9Þ
Fp ¼ ðp� p�ÞtC�1p ðp� p�Þ ð10Þ
This equation was originally based on matching andstability arguments. The term Fp can be viewed as aregularization term in the sense of Tihonov (1963). Inhydrology, Emselem and de Marsily (1971) used it todampen oscillations. Also, Eq. (9) can be derived bystatistical means in which case Ch is viewed as the co-variance matrix of measurement errors. Gavalas et al.(1976) derived it by maximizing the posterior pdf of themodel parameters (maximum a posteriori, MAP). Theobtained objective function is equal to Eq. (9) with lequal to 1. Carrera and Neuman (1986a) derived Eq. (9)by maximizing the likelihood of the parameters given thedata (maximum likelihood estimation, MLE). The ad-vantages of formulating Eq. (9) in a statistical frameworklie in the fact that it yields ways to estimate not only theparameters controlling aquifer properties but also thosecontrolling their uncertainty (variances, variogram andthe like). As it turns out, the latter are no less importantthan the former (Zimmerman et al. 1998).
The minimization of the objective function is an ar-duous task because the relation between state variablesand parameters is usually non-linear. This is why for-mulations of the inverse problem can be classified aslinear and non-linear.
Linear methodsRegardless of the formulation, the problem can be lin-earized as:
hðpÞ ¼ h0 þ Jhpðp� p�Þ ð11Þwhere Jhp is the Jacobian (sensitivity matrix), containingthe derivatives of h with respect to p. Its computation is
discussed later (sensitivity equations). Assuming thisequation to hold, Eq. (2) can be generalized to obtainparameters as the conditional expectation of p given h(Dagan 1985; Rubin and Dagan 1987). For this purpose,one needs to define the cross-covariances between dataand parameters Qph and the covariance matrix of dataQhh, given by:
Qph ¼ CppJthp ð12Þ
Qhh ¼ JhpCppJthp þ Ch ð13Þ
Then
p̂ ¼ Eðpjp�; h�Þ ¼ p� þQphQ�1hh ðh� � hðp�ÞÞ ð14Þ
By extending matrices Qph and Q�1hh in a way similar to
what was done in Eqs. (2), (14) can also be viewed ascokriging (Kitanidis and Vomvoris 1983; Hoeksema andKitanidis 1984), which results from minimizing thevariance of estimated parameters. Possibly, the most im-portant thing is that Eq. (14) and its kriging variants donot rely explicitly on any geometrical parameterizationscheme. Once Qhh has been found, one can theoreticallyestimate p at any point. In fact, for Kitanidis and Vom-voris (1983), the only parameters to be estimated are theones characterizing the statistical properties of the log-Tfield. In general, the covariance of measurement errors isalso needed.
Non linear methodsOne question that arises from Eq. (11) is why should thelinearization be performed at the prior estimates of theparameters (linearization is made around the constantmean in the original papers). Actually, Carrera and Glo-rioso (1991) prove that it is much better to linearizearound the estimated parameters themselves, whichshould be close to the true ones and may be far from theprior estimates. In practice, this is achieved by iterativelylinearizing at the parameters obtained in the previous it-eration. Carrera and Glorioso (1991) also showed that theresult is identical to the one obtained by minimizing Eq.(9), and that Eq. (14) yields the same results as the firstiteration of a Gauss-Newton method to minimize Eq. (9).This closes the loop. As it turns out, all the methodsdiscussed previously and summarized in Table 2, areidentical from the estimation viewpoint.
Differences among methods are restricted to thecharacterization of statistical parameters and to the eval-uation of uncertainty. Without discussing how differentmethods deal with these issues, the next section is devotedto arguing that indeed they are important.
How codes work
In essence, most codes work by following an iterativeprocess such as:
212
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

1. Initialization: Read input data, set iteration counteri=0, initialise parameters, p0
2. Solve the simulation problem, h(pi), compute the ob-jective function Fi, and possibly its gradient (assumingthat it is continuously differentiable), gi and the Jaco-bian matrix, Jhp.
3. Compute an updating vector, d, possibly using infor-mation on previous iterations, as well as gi and Jhp.
4. Update parameters, piþ1 ¼ pi þ d5. If convergence has been reached, then stop. Otherwise,
set i=i+1 and return to 2.
These steps are rather straightforward, except for thedefinition of the updating direction, d, and the computa-tion of g and Jhp. The most frequent methods for these areoutlined below.
Computing the updating step, dComputation of d falls within the realm of optimization.Literature on numerical optimization methods is exten-sive, but only some of these have been applied to thesolution of the groundwater inverse problem. They aresummarized in Table 3. Cooley (1977) proposed usingMarquardt’s method (Marquardt 1963), which is based onminimizing a quadratic approximation of the objectivefunction while limiting the size of the step to be taken ateach iteration. This method is quite powerful, in the sensethat it often converges in a small number of iterations, butexpensive because it requires computing the Jacobianmatrix. Carrera and Neuman (1986b) propose using acombination of quasi-Newton and conjugate gradientmethods. These are not as robust as Marquardt’s methodbut their cost per iteration is much smaller, as they onlyneed to compute the gradient of the objective function.The choice of one or the other is problem dependent.
Table 2 Summary of estimation methods. Notice that they are allquite similar despite their apparent differences. Linear methodslook different, but Carrera and Glorioso (1991) showed that they
can be viewed as the first iteration of non-linear methods. Allmethods are explicitly stated in the section, “How to estimate themodel parameters, p”
Method Type Estimator Algorithm(Eq. no.)
Reference
Least squares Non linear Fh (8) Cooley (1977) Hill et al. (1998)Maximum LikelihoodEstimation (MLE)
Non linear �2ln P(p|h) (9) Carrera and Neuman (1986a)
Conditional Expectation Linear or Nonlinear
E(p|h) (14) Dagan (1985) Carrera and Glorioso(1991)
Cokriging Linear or Nonlinear
Estimationvariance
(14) Kitanidis and Vomvoris (1983),Carrera et al. (1993a, b)
Maximum a posteriori (MAP) Non linear P(p|h) (9) with l=11 Gavalas et al. (1976)1 Weighting factor of the regularization/plausibility term
Table 3 Comparison of minimization methods used in groundwater inverse modeling
Method Comput. needs Order of convergence Convergence1 References
Gauss-Newton, Marquardt F2, g3, J4 2 Local Cooley (1977)Conjugate gradients F, g 1 Local Carrera and Neuman (1986b)Simulated annealing,Genetic algorithms
F 0 Global Rao et al. (2003) Tsai et al. (2003)
1 Global means that the method may theoretically escape from local minima. Local means that it is difficult for the method to escape froma local minimum2 Objective function3 Gradient vector4 Jacobian matrix
Table 4 Synthetic comparisonof methods to compute deriva-tives. Cost per Gauss-Newtoniteration is estimated in terms ofsimulation runs for a hypothet-ical problem of 100 parametersand 20 observation points. Inthe case of direct nonlinearproblems (i.e., nonlinear gov-erning equations, e.g. unsatur-ated flow problem), it is as-sumed that 10 iterations areneeded for the direct problem
Method Advantages Disadvantages Cost per iteration
Linear problem Nonlinear problem
Direct derivation Exact Hard to program 1011 1101
Adjoint state Exact Hard to program 211 n/aFinite differences Easy
programmingNot exact 101 1010
1 The computing cost of exact derivation and adjoint methods can be reduced if one takes advantage ofthe fact that the system matrices are identical for all the parameters
213
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

Cooley (1985) compared these two families of methodsand concluded that Marquardt method is superior (seealso Hill 1990, for additional comparisons).
Most codes use these methods, which are genericallytermed descent methods, because they seek an improve-ment of the objective function at each iteration. As aresult they tend to get stuck at local minima. Overcominglocal minima is the motivation of many methods based ondifferent variations of random searches such as simulatedannealing (Rao et al. 2003) or genetic algorithms (Tsai etal. 2003). One method that has proven highly effective insurface water hydrology is the “Shuffled Complex Evo-lution” (Duan et al. 1992), which has not yet been testedin groundwater. These methods have not been widelyused in practice both because their performance decreaseswhen the number of parameters is large (say, larger than20), which is frequent in aquifer modeling, and becausethey demand many evaluations of the objective function,which is rather expensive in groundwater models.
The complexity of the forward problem is relevantwhen comparing different optimization methods. For ex-ample, if the direct problem is non-linear, the cost ofevaluating the objective function increases much morethan the cost of computing the gradient or the Jacobianmatrix, because the computation of these is non iterative.This tends to favor order of convergence 2 methods overeither order 0 or 1 methods for non-linear problems.
Sensitivity equationsSensitivities are the derivatives of state variables withrespect to the model parameters. They are useful for tworeasons. On the one hand, they can be employed in someof the above optimization methods. On the other hand,they yield useful information about the reliability of both
the model and its estimated parameters. In addition, asthey identify which data are most sensitive to which pa-rameters, they can be used in the design of optimal net-works (see section entitled, “How good is the model?”).In essence, sensitivities can be obtained in three ways:direct derivation, adjoint state and finite differences. Acomparison of these methods can be found in Carrera etal. (1990a) and Carrera and Medina (1994).
Direct derivation is based simply on taking derivativesof the simulation equations with respect to p. In the steadystate case of Fig. 1, this leads to
A@h@p¼ @b@p� @A@p
h ð15Þ
It should be noticed that Eq. (15) allows the compu-tation of the derivatives of nodal heads with respect to theparameters, but they can be computed at every point inspace using the finite elements method (FEM) interpola-tion functions. The derivatives of any variable that de-pends on heads can be also computed as e.g. flows.
Adjoint state method equations. This method is basedon viewing the minimization of F as an optimizationproblem with respect to both h and p, while keeping thestate equations (Fig. 1) as equality constraints. The adjointstate vector l is the set of Lagrange multipliers of the jointoptimization problem, which can be obtained from:
ltA ¼ �2ðh� h�ÞtC�1h ð16Þ
The gradient of the objective function then becomes:
@F
@p¼ lt @A
@ph� @b
@p
� �þ 2C�1
p ðp� p�Þ ð17Þ
Adjoint state equations can also be used for computingthe Jacobian matrix, being advantageous when the num-ber of observation points is smaller than the number ofparameters, or for the exact computation of the Hessianmatrix (second order derivatives of the objective functionwith respect to model parameters; (see computation de-tails in Carrera and Medina 1994; Medina and Carrera2003).
Finite differences are based on approximating thederivatives by the incremental ratio.
@F
@p¼ Fðpþ DpÞ � Fðp� DpÞ
2Dpþ OðDp2Þ
¼ Fðpþ DpÞDp
þ OðDpÞ ð18Þ
Finite differences can be used without added cost tocompute the Jacobian matrix. Mehl and Hill (2003)compare the ways to perform this calculation.
The nature of the direct problem also affects the choiceof the method to compute derivatives. If it is non linear(e.g. unsaturated flow), the computational effort of thedirect problem is very large, making finite differencesmore expensive than exact methods (see Table 4). How-ever, the ease of the finite difference method and itsability to work from outside a simulation code has caused
Fig. 2 Contour lines of the objective function in the parameters P1and P2. The ellipses (dashed) represent the linear approximationimplicit in Eq (3) and similar ones. Notice that the actual uncer-tainty is larger
214
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

an increase in the use of codes based on it, such asUCODE and PEST (Poeter and Hill 1998; Doherty et al.2002).
How good is the model?
Following the modeling procedure outlined in Fig. 1, oncethe parameters have been estimated, it is necessary toassess how good are both the model concept and esti-mated parameters. Model quality is affected by threefactors (Beck 1987): (1) uncertainty about the modelstructure, (2) uncertainty about the values of the param-eters appearing in the model structure and (3) uncertaintyassociated with predictions of the future behavior of thesystem. The term uncertainty is used here to mean notonly random fluctuations in errors, but also biases (see,e.g., Barth et al. 2001).
Uncertainty about the model structureConceptual models have many uncertain features becausedata are never exhaustive and contain inconsistencies.Modelers are forced to make simplifying assumptions.Errors are introduced in the parameterization, in the dis-cretization, in the selection of boundary conditions, etc.Addressing this uncertainty often requires posing severalconceptual models. Different models can be compared interms such as model fit Eq. (8), residual distribution,parameter correlation, and confidence intervals for pa-rameters and predictions. Ideally, a good model shouldlead to a good match with observations, uncorrelatedresiduals, and reasonable parameter values. Still, severalmodels may fit all these criteria and one may need toselect one among them. Several model selection criteriahave been defined from the field of time series analysisand applied to groundwater (Akaike 1974, 1977; Rissanen
Fig. 3 a Contours of predictedvalue in the parameter space,according to the model and ac-cording to a linearization of themodel. b Confidence interval(conf. int.) of prediction ac-cording to the model and ac-cording to a linearization of themodel. A third type of confi-dence interval is shown, basedon a nonlinear approximation ofthe model. The contours of thisnonlinear approximation are notshown in (a) for clarity
215
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

1978; Schwarz 1978; Hannan 1980; Kashyap 1982).Carrera and Neuman (1986c) applied four of these criteriato a synthetic test case and concluded that the Kashyapcriterion was the best. Similar results were obtained byCarrera et al. (1990b) and by Medina and Carrera (1996).
Still, one might question the wisdom of selecting onlyone model. This implies rejecting the others, which maynot be logical if they are consistent with availableknowledge and data. This line of argument leads to ac-cepting a large set of models and using them all tocharacterize uncertainty in model predictions (Beven andBinley 1992; Beven and Freer 2001)
Difficulties associated with the calibration processThe most important difficulties associated with the opti-mization are the problems of non-uniqueness, non-iden-tifiability and instability. Non identifiability occurs whenmore than one set of parameters leads to a given solutionof the forward problem. Non-uniqueness is present whenmore than one set of parameters leads to minima of theobjective function. Instability is present when smallchanges in the observations lead to large changes in theestimated parameters, but is usually identified by a de-pendence of the solution on the initial parameters. Inaddition, optimization algorithms such as Marquardt andconjugate gradients may get stuck into a local minimum,a set of model parameters whose performance cannot beimproved by small changes in data, but which does notrepresent the overall optimum. Carrera and Neuman(1986b) discuss extensively these concepts and show thatthey are closely related. In fact, they can all be charac-terized by the region of uncertainty, even if it is linearized(Fig. 2).
Instability and large uncertainty are different concepts,but both are often associated to elongated confidenceregions, which can be characterized by the eigenvaluesand eigenvectors of the posterior covariance matrix. Theeigenvectors of this matrix form a set of orthogonalvectors, each of which is associated to an eigenvalue. Thevector associated to the largest eigenvalue represents thelinear combination of parameters that has the largest un-certainty, whereas the vector with the smallest eigenvaluedefines the direction with least uncertainty. If eigenvaluesare dramatically different, then one should expect insta-bilities to occur. One of the effects is parameter correla-tion. The parameters in Fig. 2 suffer from correlation: ashift in the estimation of one parameter (say, P1) causes ashift in the optimal value of the other (P2). In other words,the estimated parameters are not independent. This de-pendence causes the confidence intervals of the parame-ters to be larger than they would have been if they wereindependent.
To summarize the above, instabilities and large un-certainties, though frequent, can be easily identified andcharacterized. Tactics to combat these problems include:
– Regularization: This is what motivated adding Fp tothe objective function in (9). Weiss and Smith (1998)
comment on which prior information will most effec-tively reduce uncertainty.
– Reducing the number of parameters: This is whatmotivates the parameterization schemes discussed inthe section entitled, “What is to be estimated?”.
– Increasing the number and types of data, which wasdiscussed in the section, “The conceptual model:Knowledge and data”.
– Optimizing the observation scheme: Observation net-works and experiments can be designed to minimizemodel uncertainty and/or to increase the ability of datato discriminate among alternative models (Knopmanand Voss 1989; Usunoff et al. 1992)
Despite this, one may have to acknowledge that it is notpossible to find a unique solution to the problem. Thismotivates some researchers to use stochastic simulation ofparameter fields conditional to data, rather than estima-tion (e.g. G�mez-Hern�ndez et al. 1997). These tech-niques generate large numbers of e.g. transmissivity fieldsthat satisfy the available head and transmissivity data. Inthis way, one ends up with a number of models, ratherthan one. Uncertainty is associated with the ensemble setof all simulations, rather than to statistical measures ofuncertainty. As another alternative, Yapo et al. (1998)study instability using a concept known as the paretooptimum, which denotes the set of parameter vectors forwhich improving one component of the objective functioncauses a deterioration in another component.
Difficulties associated with predictionsof the future behavior of the systemAll the above difficulties cause the model parameters tohave some uncertainty, which is inherited by the modelpredictions. The possibility of multiple conceptual modelscauses further uncertainty in the model predictions.Therefore, evaluating uncertainty in prediction requiresanalyzing the effect of both parameter and model uncer-tainty. The latter is usually analyzed by simulating withthe models available and evaluating the range of predic-tions (e.g., Medina and Carrera 1996). While systemati-zation is needed, the fact that conceptual model buildingis not systematic makes this objective hard to meet.Hence, what follows concentrates on evaluating the effectof parameter uncertainty.
There exist various methods for quantifying the pre-diction uncertainty: Linear approximation, non-linearapproximation and Monte Carlo methods. They are out-lined in Fig. 3. The linear method is relatively simple. It isbased on the a posteriori covariance matrix:
Sp ¼ JthpC�1
h Jhp þ C�1p ð19Þ
where Jhp is the Jacobian matrix, Ch the measurementscovariance matrix and Cp the parameters covariancematrix.
If f is a prediction to be made with the model (f is afunction of parameters, p), a lower bound of its varianceis given by:
216
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

Var ðf Þ ¼ @f
@p
� �t
Sp@f
@p
� �þ s2
p0 ð20Þ
where s2p0 represents model errors independent of pa-
rameter uncertainties. This equation represents a linearapproximation, so that actual uncertainty may be largerthan that represented. This is why more sophisticatedapproaches may be needed. Still, this equation allows oneto spell out quantitatively how the different factors affectprediction uncertainty. In essence, prediction uncertaintygrows with:
1) Sensitivity of predictions to model parameters andinitial conditions. Obviously, a parameter is a source ofconcern only if predictions are sensitive to it, asmeasured by @f/@p. This is why sensitivity analysesare sometimes performed instead of a formal erroranalysis.
2) Uncertainty in model parameters (and/or initial state).This is measured by the covariance matrix Sp.
Non linear methods are more difficult to apply. Vecchiaand Cooley (1987) present a way to compute nonlinearconfidence intervals. They conclude that (i) correspond-ing linear and nonlinear confidence intervals are oftenoffset or shifted towards each other, and the nonlinearones are often larger, (ii) the variability in sizes of non-linear confidence intervals is usually larger than the cor-responding variability in linear confidence interval sizes,(iii) the difference between the sizes of linear and non-linear confidence intervals increases as the sizes of theintervals increase, and (iv) prior information can alter thesize of the confidence intervals. Christensen and Cooley(1999) present a measure to quantify model non-linearity.The prediction analyzer of PEST currently includesnonlinear confidence intervals.
The Monte Carlo method is the most computationallyintensive method. It is based on many forward problemevaluations with different sets of parameters. Its mainadvantages are that it is easy to understand, it yields aprobability density function and does not require difficultassumptions. Its main problem is that it is hard to ascer-tain the required number of simulations. An example ofthis is the GLUE methodology (Generalized LikelihoodUncertainty Estimation; Beven and Freer 2001).
What is actually done?
Application trendsThe literature in scientific journals tends to concentrate onthe development of new methods and new interpretations.Therefore it is not appropriate for identifying applicationtrends. Applications are most often found in internal re-ports or special sessions of congresses. None of these areeasy to track exhaustively. Therefore, this section is bi-ased by what can effectively be found and by the authors’personal views. Despite the above, a search on the “web
of science” (http://go5.isiknowledge.com/portal.cgi),which keeps track of all papers published in major jour-nals, was performed. Results suggest that the number ofpapers about inverse modeling remains more or lesssteady (around 5% of those about groundwater modeling),while the number of papers using inverse modeling hasslowly but steadily increased in the last 13 years. Thesepapers cover a broad range of topics. Many have beencited in previous sections and some will be cited in theremaining sections. It is difficult, however, to identifytrends. The only ones that emerge is that geostatisticalinversion tends to be used in relatively small scaleproblems, such as the interpretation of hydraulic tests,while large scale models tend to be based on zonation.Since most groundwater applications can be classified inone of these two categories, they deserve further attentionand are discussed below.
Geostatistical inversionThe use of geostatistics is motivated by the need to ad-dress the variability of hydraulic properties (specificallytransmissivity) when modeling aquifers. In practice,however, this need can be understood in two differentways: (1) to constrain model parameters and (2) becauseit is deemed necessary for model predictions. While thesetwo views are not exclusive, they rarely go together.
Methodologically, geostatistical inversion follows thesteps originally proposed by Clifton and Neuman (1982).That is, one starts by proposing a stochastic model (i.e.,whether the log-T is stationary, what is its variogram andmean, etc). Second, available data is used to produce aprior, best estimate of log-T and its covariance, using Eqs.(2) and (3). Finally, these are used to obtain an estimate ofmodel parameters either by minimizing Eq. (9) or usingEq. (14). Kitanidis and Vomvoris (1983) and Carrera andNeuman (1986a) modified this concept by emphasizingthe need for optimal estimation of statistical parameters(variances of errors, correlation distance and the like).The importance of these parameters has been recognizedby many. In fact, this is one of the conclusions of Zim-merman et al. (1998), after comparing different geosta-tistical inversion techniques.
Successful applications to real field data are restrictedto relatively small-scale problems. These include hy-draulic test interpretation (Yeh and Liu 2000; Meier et al.2001; Vesselinov et al. 2001), well capture zone delin-eation (Vassolo et al. 1998; Kunstmann et al. 2002; Harraret al. 2003), and others (Barlebo et al. 2004). The fact thatapplications to large-scale aquifers are scarce reflects thedifficulty in modeling them, but also points out the twolimitations of geostatistics as it is most frequently used: itfails to include geological information and it fails to re-produce actual variability.
Geological information is normally expressed in termsthat are difficult to account for during inversion (depo-sitional patterns, orientation of conductive features, andthe like). This type of information can become precise atthe large scale but rarely at the test scale. Here, the onlything that can be said is that permeability is variable,
217
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

which is properly acknowledged by geostatistics. Still,when discrete features are identified, inversion gainssignificantly by explicitly including them as deterministicfeatures. This was acknowledged by Meier et al. (2001),who used information about the stress state of a shearzone to define the anisotropy direction of fracture trans-missivity.
Ironically, the main problem with geostatistical esti-mation is the fact that it fails to reproduce actual vari-ability. As discussed in the section, “How to estimate themodel parameters, p”, Eqs. (9) and (14) yield the condi-tional expectation of log-T given the available data. Assuch, the estimation says little about actual deviationsbecause the expected value filters them out. When dataare abundant, which is frequent in detailed hydraulic tests,variability patterns can be delineated with some certainty(e.g. Meier et al. 2001). Otherwise, only the estimationcovariance provides some information about variabilityand about the continuity of high conductivity zones (pathsfor solutes migration) or low conductivity barriers. An-other source of hope for large-scale geostatistical inver-sion is the use of geophysical data (Hubbard and Rubin2000).
G�mez-Hern�ndez and coworkers (G�mez-Hern�ndezet al. 1997; Capilla et al. 1998) address the above issue byrejecting optimal estimation altogether and, instead, per-forming conditional simulations. Ideally, the average ofall these simulations should be equal to the conditionalestimation, but each of them reproduces the assumedvariability. As such, when used for predicting processesthat are sensitive to variability (e.g., contaminant trans-port), simulations are much more appropriate.
Geologically based inversionThe main difference between aquifer scale models andtest scale models is the degree of reliance on geologywhen defining variability and the multiplicity of param-eter types. Regarding variability, geological data arerarely precise but cannot be ignored. Different formations,or different units within a formation, may have differentproperties. Thus, when these units can be outlined, theworth of this information cannot be ignored. Unfortu-nately, boundaries between units are rarely known accu-rately. Hence, a lot of work may be needed to test dif-ferent geometries whenever the effect of geometry isfound to be important. The process involves defininggeometry and testing it against available data, which isrepeated until a satisfactory fit is found. The procedure istedious, it involves interactions between modelers andgeologists, and it is not systematic. In fact, it does not getproperly documented, so that if the model is revised yearslater, one is not sure about the reason behind the selectedmodel structure. Things are made worse by the fact thatnot only transmissivity but also other types of parametersneed to be specified. In the experience of the authors ofthis paper, ambiguities frequently exist about recharge(both average amount and time variability), boundaryfluxes, pumping rates (the main finding of Castro et al.
1999, was that official pumping rates were badly under-estimated) and the nature of river-aquifer interaction.
The somewhat chaotic nature of the process makes ithard to describe in detail. Attempts have been made byCooley et al. (1986) and Hill (1998). Some trends can beidentified:
– Point values of hydraulic conductivity and transmis-sivity are prone to error. Moreover they may be of littleuse when modeling at scales much larger than thepumping test in which they are based. These mea-surements need to be put into the related geologicalcontext.
– Dominant features (i.e. conductive fractured zones,paleochannels, or the like) must be included in themodel even if they are not known accurately.
– Much information about aquifer behavior is containedin discrete events (floods, big rainfalls). Taking fulladvantage of these requires transient simulations.
– Model calibration is rarely unique (i.e., different modelstructures may fit hard data satisfactorily). This un-certainty ought to be acknowledged when performingmodel predictions. Reducing it often requires the useof complementary data as discussed in the section,“The conceptual model: Knowledge and data”.
This kind of approach displays several drawbacks. On onethe hand, it does not account properly for uncertainty. Theresulting covariance matrix of model parameters is con-ditioned not only on hard data, but also on the manysubjective decisions the modeler has made. While thesecan be taken into account by making predictions withseveral conceptual models, it is rarely done. On the otherhand, one is never sure about the validity of the modelbeyond calibration conditions. In summary, the procedureneeds to be systematized. This is best done in a geosta-tistical framework, hence the need to seek geostatisticaldescriptions that take advantage of qualitative geologydata.
What comes next?
The discussion in the previous section makes it clear thatit is believed that the time is ripe for standard use ofinverse modeling in groundwater studies aimed at aquifercharacterization and management, a view which we sharewith Poeter and Hill (1997).
In the 1970s, the U.S. Geological Survey promoted theuse of numerical modeling for aquifer studies. This led toa significant rise in the quality of understanding ofgroundwater flow by many hydrologists. Numericalmodeling forced them to be quantitatively consistentwhen integrating different data types. Since this is neverstraightforward, hydrologists were forced to test differentparameter values, to perform sensitivity analyses, and toguess at what could be the cause behind observed data. Inthe end, they might not be fully successful, but they
218
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

gained understanding, which is what counts for properdecision making.
The situation is now changing on several accounts. Forone, hydrologists are increasingly expected to make harddecisions for which qualitative understanding is not suf-ficient. Instead, accurate quantitative models are needed.Second, the volume of data is also increasing. Long datasets of heads, pumping history, and hydrogeochemicalmeasurements are becoming available. While they con-tain valuable qualitative information, it is clear that muchmore can be gained by using them quantitatively, i.e., bybuilding models that can match those data. Third, mod-eling exercises such as INTRAVAL (Larsson 1992) havemade it clear that the most important issue when model-ing an aquifer is the conceptual model. Since manualcalibration is very tedious, modellers have not been ableto concentrate sufficiently on conceptual issues. Auto-matic calibration should change that.
In short, it is contended that conceptually sound andquantitatively consistent modeling requires automatic in-version. This allows the modeler to concentrate on thequalitatively important issues, such as the definition of theconceptual model, representation of spatial variability,discussion of alternative management strategies, etc.Also, this allows improved model building and use.Therefore, it should be one of the challenges in the futureof hydrogeology. As it is, however, inverse modeling hasnot reached a desired level of maturity. A number ofdifficulties must be overcome. Some are listed below:
– Difficulty in running inversion codes. Since one has tointroduce data on parameterization, observations, theirreliability, etc., general purpose inversion codes arecumbersome and hard to run. The emergence of codessuch as PEST or UCODE has changed that trend sig-nificantly, but places an additional burden on themodeler by requiring him or her to know programmingand the inside of codes. This could be alleviated bydeveloping ‘utility programs’ to enable the interfacingof the inversion engine with the forward model.
– Incorporation of geological information. As discussedearlier, zonation is the most convenient and widelyused approach for realistic incorporation of geologicaldata available in the form of maps. This is too rigidand incomplete. Geological information is usually“soft”, in the sense that boundaries between formationsunderground are rarely known accurately. Moreover,important features (paleochannels, water conductingfaults, etc.) may have gone unmapped. Furthermore,even within a formation, there may be a lot of quali-tative information (depositional patterns, continuity ofwater conducting features, gradation of materials andthe like) that is difficult to incorporate in a zonationframework. For solute transport problems, these sour-ces of small scale variability may be just as importantas large scale trends. Presumably, they can be besthandled in a geostatistical framework. While someapproaches are available for incorporating them (i.e.,treat each zone geostatistically, use geological maps as
soft information), existing codes lack sufficient ro-bustness and flexibility to be of general use.
– Incorporation of age, environmental isotopic data,temperature and other sources of information. Asdiscussed, using different types of data improves dra-matically the stability of inversion and the robustnessof the model. In fact, a number of authors have shownthat incorporating these data does improve the reli-ability of the model. The problem, again, lies in theavailability of easy-to-run, flexible codes.
– Representation of uncertainties. It has also been dis-cussed that dealing with uncertainty is an integral partof modeling. This is true both at the characterizationstage, where data contain errors and model structure isnever accurately known, and at the prediction stage.Well informed decisionmaking can not be based onsingle model predictions. Acknowledging uncertaintiesin both model concept and parameters is required. Asdiscussed, linear estimates of uncertainty are very poor(they may underestimate actual errors in orders ofmagnitude; Carrera and Glorioso 1991). Alternative,non-linear estimates of error are difficult to use forhydrologists who are not familiar with statistics, eventhough tools are becoming increasingly user-friendly.Therefore, Monte Carlo simulation remains the mostappealing. An advantage is the relative ease to ac-commodate conceptual model uncertainty. Still, atpresent, Monte Carlo methods are extremely expensiveand again, not easy to use.
– Coupling to GIS. One of the drawbacks of inversemodeling is the need to incorporate all causes ofvariability; geology, soil properties and use, pumping,etc. If any of them is missed (e.g., if the effects of apumping well are not incorporated), the algorithm willreact by modifying the parameters to circumvent theeffect of the error so as to best fit the measurements(e.g., reduce recharge, increase transmissivity, etc.).The resulting model is thus erroneous not only becauseof the missing factor, but also because of those mod-ifications. Conventional modeling is less sensitive tothis kind of error (one may be aware that model cal-culations may be erroneous in areas affected by un-known factors, but that does not affect the rest of themodel). Therefore, inverse modeling requires carefulaccounting. As the history of aquifers becomes in-creasingly complex (growing number of pumpingwells, evolving soil uses, improved knowledge ofaquifer geometry), so does the difficulty to incorporateall factors. The tendency to incorporate all territorialdata in GIS sheds some hope on the possibility of in-corporating all these data in a model. In fact, therehave been a number of efforts to link GIS to traditionalmodels (Gogu et al. 2001; Chen et al. 2002). It is clear,however, that this need is more pressing for inversemodels. Efforts along the line of Graphical User In-terfaces are starting.
All the above issues might suggest that inverse modelingis not yet mature. It should be stressed, however, that all
219
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

the above-mentioned difficulties are just that, difficulties.They can be, and indeed are, overcome in practicethrough laborious work. Moreover, these difficulties arenot specific of inverse modeling; they are mostly sharedby conventional modeling (although they are often ig-nored). Finally, while it is true that further improvementof programs is needed, it is not clear that their applica-bility is more difficult than it was for the use of earlycodes when the U.S. Geological Survey made modeling aroutine for aquifer studies. Routine application of inversemodeling is the future. The sooner it starts, the betterprepared will hydrologists be to face the challenges of thesoon-to-come future.
Acknowledgments The final manuscript benefitted from commentsby Mary Hill, Matt Tonkin and Johan Valstar
References
Akaike H (1974) A new look at statistical model identification.IEEE Trans Automat Contr AC-19:716–722
Akaike H (1977) On entropy maximization principle. In: Krish-naiah PR (ed) Applications of statistics. North Holland, �ms-terdam, pp 27–41
Anderman ER, Hill MC (1999) A new multi-stage ground-watertransport inverse method, Presentation, evaluation, and impli-cations. Water Resour Res 35(4):1053–1063
Barlebo HC, Hill MC, Rosbjerg D (2004) Identification ofgroundwater parameters at Columbus, Mississippi, using three-dimensional inverse flow and transport model. Water ResourRes 40(4):W0421110
Barth GR, Hill MC, Illangasekare TH, Rajaram H (2001) Predictivemodeling of flow and transport in a two-dimensional interme-diate-scale, heterogeneous porous media. Water Resour Res37(10):2503–2512
Beck MB (1987) Water quality modelling: a review of the analysisof uncertainty. Water Resour Res 23(8):1393–1442
Bennet RR, Meyer RR (1952) Geology and groundwater resourcesof the Baltimore area. Mines and Water Resour Bull 4, Mary-land Dept of Geology
Beven K (1993) Prophecy, Reality and uncertainty in distributedhydrological modeling. Adv Water Resour 16(1):41–51
Beven KJ, Binley AM (1992) The future of distributed models:model calibration and uncertainity prediction. Hydrol Process6(3):279–298
Beven KJ, Freer J (2001) Equifinality, data assimilation, and un-certainty estimation in mechanistic modelling of complex en-vironmental systems using the GLUE methodology. J Hydrol249:11–29
Bredehoeft J (2004) Modeling: the conceptualization problem-surprise. Hydrogeol J (this issue)
Capilla JE, G�mez-Hern�ndez JJ, Sahuquillo A (1998) Stochasticsimulation of transmissivity fields conditional to both trans-missivity and piezometric head data—3. Application to theCulebra formation at the waste isolation pilot plan (WIPP),New Mexico, USA. J Hydrol 207(3–4):254–269
Carrera J (1987) State of the art of the inverse problem applied tothe flow and solute transport problems. In: Groundwater flowand quality modeling, NATO ASI Ser: 549–585
Carrera J, Neuman SP (1986a) Estimation of aquifer parametersunder transient and steady-state conditions, 1. Maximum like-lihood method incorporating prior information. Water ResourRes 22(2):199–210
Carrera J, Neuman SP (1986b) Estimation of aquifer parametersunder transient and steady-state conditions, 2. Uniqueness,stability and solution algorithms. Water Resour Res 22(2):211–227
Carrera J, Neuman SP (1986c) Estimation of aquifer parametersunder transient and steady-state conditions, 3. Application tosynthetic and field data. Water Resour Res 22(2):228–242
Carrera J, Navarrina F, Vives L, Heredia J, Medina A (1990a)Computational aspects of the inverse problem. In Proc. of VIIIinternational conference on computational methods in waterresources. CMP, pp 513–523
Carrera J, Heredia J, Vomvoris S, Hufschmied P (1990b) FractureFlow Modelling: Application of automatic calibration tech-niques to a small fractured Monzonitic Gneiss Block. In:Neuman N (ed) Proc hydrogeology of low permeability envi-ronments, IAHPV, Hydrogeology, selected papers, vol 2, pp115–167
Carrera J, Glorioso L (1991) On Geostatistical Formulations of theGroundwater Flow Inverse Problem. Adv Water Resour14(5):273–283
Carrera J, Medina A, Galarza G (1993a) Groundwater inverseproblem. Discussion on geostatistical formulations and valida-tion. Hydrog�ologie (4):313–324
Carrera J, Mousavi SF, Usunoff E, Sanchez-Vila X, Galarza G(1993b) A discussion on validation of hydrogeological models.Reliability Eng Syst Saf 42:201–216
Carrera J, Medina A (1994) An improved form of adjoint-stateequations for transient problems. In: Peters, Wittum, Herrling,Meissner, Brebbia, Grau, Pinder (eds) Proc X internationalconference on methods in water resources, pp 199–206
Castro A, Vazquez-Su e E, Carrera J, Jaen M, Salvany JM (1999)Calibraci�n del modelo regional de flujo subterr�neo en la zonade Aznalc�llar, Espa a: ajuste de las extracciones [Calibrationof the groundwater flow regional model in the Aznalcollar site,Spain: extractions fit]. In Tineo A (ed) Hidrolog�a Subterr�nea.II,13. Congreso Argentino de Hidrogeolog�a y IV SeminarioHispano Argentino sobre temas actuales de la hidrogeologia
Chen CX, Pei SP, Jiao JJ (2003) Land subsidence caused bygroundwater exploitation in Suzhou City, China. Hydrogeol J11(2):275–287
Chen Z, Huang GH, Chakma A, Li J (2002) Application of a GIS-based modeling system for effective management of petroleum-contaminated sites. Env Eng Sci 9(5):291–303
Christensen S, Cooley RL (1999) Evaluation of confidence inter-vals for a steady state leaky aquifer model. Adv Water Resour22(8):807–817
Clifton PM, Neuman SP (1982) Effects of kriging and inversemodeling on conditional simulation of the Avra valley aquiferin southern Arizona. Wat Resour Res 18(4):1215–1234
Cooley RL (1977) A method of estimating parameters and as-sessing reliability for models of steady state groundwater flow,1, Theory and numerical properties. Water Resour Res13(2):318–324
Cooley RL (1985) A comparison of several methods of solvingnonlinear-regression groundwater-flow problems. Water Re-sour Res 21(10):1525–1538
Cooley RL, Konikow LF, Naff RL (1986) Nonlinear regressiongroundwater-flow modeling of a deep regional aquifer system.Water Resour Res 22(13):1759–1778
Dagan G (1985) Stochastic modeling of groundwater flow by un-conditional and conditional probabilities: the inverse problem.Water Resour Res 21(1):65–72
de Marsily GH, Lavedan G, Boucher M, Fasanino G (1984) In-terpretation of interference tests in a well field using geosta-tistical techniques to fit the permeability distribution in a res-ervoir model. In: Verly et al (ed) Proc Geostatistics for naturalresources characterization. Part 2. D. Reidel Pub. Co. : pp 831–849
de Marsily G, Delhomme JP, Delay F, Buoro A (1999) 40 years ofinverse problems in hydrogeology. Comptes Rendus del’Academie des Sciences Series IIA. Earth and Planet Sci329(2):73–87. Elsevier Science
Doherty J, Brebber L, Whyte P (2002) PEST-Modelling dependentparameter estimation. Water Mark Computing. Corinda (Aus-tralia)
220
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

Doherty J (2003) Groundwater model calibration using pilot pointsand regularization. Ground Water 41(2):170–177
Duan QY, Sorooshian S, Gupta V (1992) Effective and efficientglobal optimization for conceptual rainfall-runoff models.Water Resour Res 28(4):1015–1031
Emselem Y, de Marsily G (1971) An automatic solution for theinverse problem. Wat Resour Res 7(5):1264–1283
Gavalas GR, Shaw PC, Seinfeld JH, (1976) Reservoir historymatching by Bayesian estimation. Soc Petrol Eng J 261:337–350
Gogu RC, Carabin G, Hallet V, Peters V, Dassargues A (2001)GIS-based hydrogeological databases and groundwater model-ing. Hydrogeol J 9(6):555–569
G�mez-Hern�ndez JJ, Sahuquillo A, Capilla JE (1997) Stochasticsimulation of transmissivity fields conditional to both trans-missivity and piezometric data. 1. Theory. J Hydrol 204(1–4):162–174
G�mez-Hern�ndez JJ, Wen XH (1998) To be or not to be multi-Gaussian? A reflection on stochastic hydrogeology. Adv WaterResour 21(1):47–61
Gupta HV, Bastidas LA, Sorooshian S, Shuttleworth WJ, Yang ZL(1999) Parameter estimation of a land surface scheme usingmulticriteria methods. J Geophys Res-Atmos 104(D16):19491–19503
Hadamard J (1902) Sur les problemes aux derivees partielles et leursignification physique. [On the problems about partial deriva-tives and their physical significance]. Bull Univ Princeton13:49–52
Hannan ES (1980) The estimation of the order of an ARMA pro-cess. Ann Stat (8):1071–1081
Harrar WG, Sonnenborg TO, Henriksen HJ (2003) Capture zone,travel time, and solute-transport predictions using inversemodeling and different geological models. Hydrogeol J 11(5):536–548
Hernandez AF, Neuman SP, Guadagnini A, Carrera J, (2003)Conditioning mean steady state flow on hydraulic head andconductivity through geostatistical inversion. Stochas Env ResRisk Assess 17(5):329–338
Hill MC (1990) Relative efficiency of four parameter-estimationmethods in steady-state and transient ground-water flow mod-els. In: Gambolati, Rinaldo, Brebbia, Gray, Pinder (eds) ProcComputational Methods in Subsurface Hydrology, InternationalConference on Computational Methods in Water Resources, pp103–108
Hill MC (1992) A computer program (MODFLOWP) for estimat-ing parameters of a transient, three-dimensional, ground-waterflow model using nonlinear regression. U.S. Geological Survey
Hill MC (1998) Methods and guidelines for effective model cali-bration. US geological survey. Water-Resour Investigat Rep98–4005, 91 pp, Colorado
Hill MC, Cooley RL, Pollock DW (1998) A controlled experimentin ground water flow model calibration. Ground Water36(3):520–535
Hoeksema RJ, Kitanidis PK (1984) Comparison of Gaussian con-ditional mean and kriging estimation in the geostatistical so-lution to the inverse problem. Water Resour Res 21(6):337–350
Hollenbeck KJ, Jensen KH. (1998) Maximum-likelihood estimationof unsaturated hydraulic parameters. J Hydrol 210(1–4):192–205
Hu LY (2002) Combination of Dependent Realizations within thegradual deformation method. Math Geol 34(8):953–963
Hubbard S, Rubin Y (2000) A review of selected estimation tech-niques using geophysical data. J Contamin Hydrol 45(2000):3–34
Kashyap RL (1982) Optimal choice of AR and MA parts in au-toregressive moving average models. IEEE Trans Pattern AnalMach Intel PAMI 4(2):99–104
Kitanidis PK, Vomvoris EG (1983) A geostatistical approach to theinverse problem in groundwater modelling (steady state) andone dimensional simulations. Water Resour Res 19(3):677–690
Kitanidis PK (1997) Introduction to geostatistics: applications tohydrogeology. Cambridge University Press, Cambridge, NY
Knopman DS, Voss CI (1989) Multiobjective sampling design forparameter-estimation and model discrimination in groundwatersolute transport. Water Resour Res 25(10):2245–2258
Kool JB, Parker JC, Van Genuchten MT (1987) Parameter esti-mation for unsaturated flow and transport models. A Review JHydrol 91:255–293
Kool JB, Parker JC (1988) Analysis of the inverse problem fortransient unsaturated flow. Water Resour Res 24(6):817–830
Kowalsky MB, Finsterle S, Rubin Y (2004) Estimating flow pa-rameter distributions using ground-penetrating radar and hy-drological measurements during transient flow in the vadosezone. Adv Water Resour 27:583–599
Kunstmann H, Kinzelbach W, Siegfried T (2002) Conditional first-order second-moment method and its application to the quan-tification of uncertainty in groundwater modeling. Water Re-sour Res 38(4):Art. No. 1035
Larocque M, Banton O, Ackerer P, Razack M (1999) Determiningkarst transmissivities with inverse modeling and an equivalentporous media. Ground Water 37(6):897–903
Larsson A (1992) The International Projects INTRACOIN, HY-DROCOIN and INTRAVAL. Adv Water Resour 15(1):85–87
Mantoglou A (2003) Estimation of Heterogeneous Aquifer Pa-rameters from Piezometric Head Data using Ridge Functionsand Neural Networks. Stochas Environmen Risk Assess17:339–352
Marquardt DW (1963) An algorithm for least-squares estimation ofnon-linear parameters. J Soc Indust Appl Math 11(2)
McLaughlin D, Townley LLR (1996) A reassessment of thegroundwater inverse problem. Water Resour Res 32(5):1131–1161
Medina A, Carrera J (1996) Coupled estimation of flow and solutetransport parameters. Water Resour Res 32(10):3063–3076
Medina A, Carrera J (2003) Geostatistical inversion of coupledproblems: dealing with computational burden and differenttypes of data. J Hydrol 281:251–264
Mehl SW, Hill MC (2003) Locally refined block-centered finite-difference groundwater models. In: Kovar K, Zbynek H (eds)Evaluation of parameter sensitivity and the consequences forinverse modelling and predictions. IAHS Publication 277, p.227–232
Meier P, Carrera J, Sanchez-Vila X (1999) A numerical study onthe relation between transmissivity and specific capacity inheterogeneous aquifers. Ground Water 37(4):611–617
Meier P, Medina A, Carrera J (2001) Geoestatistical inversion ofcross-hole pumping tests for identifyingpreferential flowchannels within a shear zone. Ground Water 39(1):10–17
Meixner T, Gupta HV, Bastidas LA, Bales RC (1999) Sensitivityanalysis using mass flux and concentration. Hydrol Proc 13(14–15):2233–2244
Nelson RW (1960) In place measurement of permeability in het-erogeneous media, 1. Theory of a proposed method. J GeophysRes 65(6):1753–1760
Nelson RW (1961) In place measurement of permeability in het-erogeneous media, 2. Experimental and computational consid-erations. J Geophys Res 66:2469–2478
Neuman SP (1973) Calibration of distributed parameter ground-water flow models viewed as a multiple-objective decisionprocess under uncertainty. Water Resour Res 9(4):1006–1021
Neuman SP, Wierenga PJ (2003) A comprehensive strategy ofhydrogeologic modeling and uncertainty analysis for nuclearfacilities and sites. NU-REG/CR-6805, US Nuclear RegulatoryCommision, Washington, DC
Poeter EP, Hill MC (1997) Inverse models: A necessary next step ingroundwater modeling. Ground Water 35(2):250–260
Poeter EP, Hill MC (1998) Documentation of UCODE: a computercode for universal inverse modeling. U.S. Geological SurveyWater-Resources Investigations Report 98–4080: 116 pp
Ramarao BS, Lavenue AM, de Marsily GH, Marietta MG (1995)Pilot point methodology for automated calibration of anensemble of conditionally simulated transmissivity fields,1. Theory and computational experiments. Water Resour Res31(3):475–493
221
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

Rao SVN, Thandaveswara BS, Bhallamudi SM (2003) Optimalgroundwater management in deltaic regions using simulatedannealing and neural networks. Water Resour Manag 17(6):409–428
Rissanen J (1978) Modeling by shortest data description. Auto-matica 14:465–471
Roggero F, Hu LY (1998) Gradual deformation of continuousgeostatistical models for history matching. In annual technicalconference, SPE 49004
Rubin Y (2003) Applied stochastic hydrogeology. Oxford Univer-sity Press, New York 391 pp
Rubin Y, Dagan G (1987) Stochastic Identification of Transmis-sivity and Effective Recharge in Steady Groundwater-Flow,1 Theory. Water Resour Res 23(7):1185–1192
Rudin M, Beckmann N, Prosas R., Reese T, Bochelen D, Sauter A.(1999) In vivo magnetic resonance methods in pharmaceuticalresearch: current status and perspectives. NMR Biomed12(2):69–97
Rhli FJ, Lanz C, Ulrich-Bochsler S, Alt KW (2002) State-of-the-art imaging in palaeopathology: the value of multislice com-puted tomography in visualizing doubtful cranial lesions. Int JOsteoarchaeol 12(5):372–379
Sahuquillo A, Capilla J, G�mez-Hern�ndez JJ, Andreu J (1992)Conditional simulation of transmissivity fields honouringpiezom�trica data. In: Blain WR, Cabrera E Fluid Flow Mod-eling, Comput. Mech., Billerica, Mass, pp 201–212
Sambridge M, Mosegaard K (2002) Monte Carlo methods in geo-physical inverse problems. Rev Geophys 40(3):Art. No. 1009
Schwarz G (1978) Estimating the dimension of a model. Ann Stat6(2):461–464
Stallman RW (1956) Numerical analysis of regional water levels todefine aquifer hydrology. Am Geophys Union Trans37(4):451–460
Tihonov AN (1963) Regularization of incorrectly posed problems,Sov. Math Dokl 4:1624–1627
Tsai FTC, Sun NZ, Yeh WG (2003) Global-local optimizationmethods for the identification of threedimensional parameterstructure in groundwater modeling. Water Resour Res 39(2)Art:1043
Usunoff E, Carrera J, Mousavi SF (1992) An approach to the designof experiments for discriminating among alternative conceptualmodels. Adv Water Resour 15(3):199–214
Varni M, Carrera J (1998) Simulation of groundwater age distri-bution. Wat Resour Res 34(12):3271–3281
Vassolo S, Kinzelbach W, Schafer W (1998) Determination of awell head protection zone by stochastic inverse modelling.J Hydrol 206(3–4):268–280
Vecchia AV, Cooley RL (1987) Simultaneous confidence andprediction intervals for nonlinear regression models with ap-
plication to a groundwater flow model. Water Resour Res23(7):1237–1250
Vesselinov VV, Neuman SP, Illman WA (2001) Three-dimensionalnumerical inversion of pneumatic cross-hole tests in unsatur-ated fractured tuff 2. Equivalent parameters, high-resolutionstochastic imaging and scale effects. Water Resour Res37(12):3019–3041
Wagner BJ, Gorelick SM (1987) Optimal groundwater qualitymanagement under parameter uncertainty. Water Resour Res23(7):1162–1174
Weiss R, Smith L (1998) Efficient and responsible use of priorinformation in inverse methods. Ground Water 36(1):151–163
Weissmann GS, Carle SA, Fogg GE (1999) Three-dimensionalhydrofacies modeling based on soil survey analysis and tran-sition probability geostatistics. Water Resour Res 35(6):1761–1770
Woodbury AD, Rubin Y (2000) A full-Bayesian approach to pa-rameter inference from tracer travel time moments and inves-tigation of scale effects at the Cape Cod experimental site.Water Resour Res 36(1):159–171
Woodbury AD, Smith JL, Dunbar WS (1987) Simultaneous in-version of temperature and hydraulic data, 1. Theory and ap-plication using hydraulic head data. Water Resour Res23(8):1586–1606
Xiang Y, Sykes JF, Thomson NR (1992) A composite L1 parameterestimator for model fitting in groundwater flow and solutetransport simulation. Water Resour Res 29(6):1661–1673
Yapo PO, Gupta HV, Sorooshian S (1998) Multi-objective globaloptimization method for hydrological models. J Hydrol204:83–87
Yeh TCJ, Liu SY (2000) Hydraulic tomography: Development of anew aquifer test method. Water Resour Res 36(8):2095–2105
Yeh WWG, Yoon YS (1981) Aquifer parameter identification withoptimum dimension in parameterization. Wat Resour Res17(3):664–672
Yeh WWG (1986) Review of parameter estimation procedures ingroundwater hydrology: The inverse problem. Water ResourRes 22:95–108
Zimmerman DA, de Marsily G, Gotway CA, Marietta MG, AxnessCL, Beauheim RL, Bras RL, Carrera J, Dagan G, Davies PB,Gallegos DP, Galli A, G�mez-Hern�ndez JJ, Grindrod P,Gutjahr AL, Kitanidis PK, Lavenue AM, McLaughlin D,Neuman SP, RamaRao BS, Ravenne C, Rubin Y (1998) Acomparison of seven geostatistically based inverse approachesto estimate transmissivities for modeling advective transport bygroundwater flow. Water Resour Res 34(6):1373–1413
222
Hydrogeol J (2005) 13:206–222 DOI 10.1007/s10040-004-0404-7

























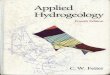
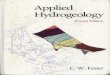

![Notes Hydrogeology[1]](https://img.dokumen.tips/doc/110x75/553cb15155034636568b4951/notes-hydrogeology1.jpg)
