Embed Size (px)
Citation preview

Introduction to Sensor Data FusionMethods and Applications
• Last lecture: “Why Sensor Data Fusion?”’
– Motivation, general context– Discussion of examples
• oral examination: 6 credit points after the end of the semester
• prerequisite: participation in the excercises, running programs
• continuation in Summer: lectures and seminar on advanced topics
• job opportunities as research assistant in ongoing projects, practicum
• subsequently: master theses at Fraunhofer FKIE, PhD theses possible
• slides/script: email to [email protected], download
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

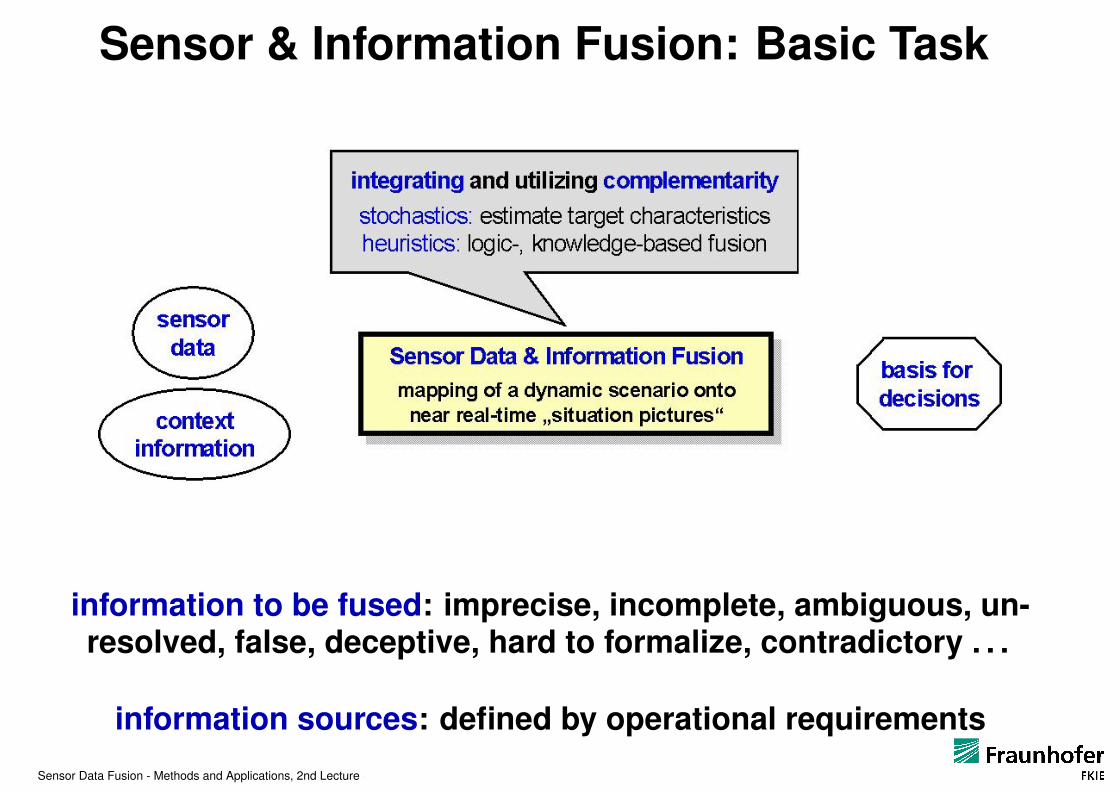
Sensor & Information Fusion: Basic Task
-/
information sources: defined by operational requirements
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Sensor & Information Fusion: Basic Task
information to be fused: imprecise, incomplete, ambiguous, un-resolved, false, deceptive, hard to formalize, contradictory . . .
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015
Sensor & Information Fusion: Basic Task
information to be fused: imprecise, incomplete, ambiguous, un-resolved, false, deceptive, hard to formalize, contradictory . . .
information sources: defined by operational requirementsSensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

• single sensors/networkmeasurements
– kinematical parameters– classification attributes
• data processing/fusion
– temporal integration / logical analysis– statistical estimation / data association– combination with a priori information
• condensed information
– objects represented by “track structures”– quantitative accuracy/reliability measures
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

A Generic Tracking and Sensor Data Fusion System
Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
- Object Environment- Object Characteristics
A Priori Knowledge:
- Sensor Performance
- Track Cancellation- Object Classification / ID- Track-to-Track Fusion
Track Processing:
- Interaction Facilities
Man-Machine Interface:
- Displaying Functions- Object Representation
Tracking & Fusion System
Sensor System Sensor System
SensorData
SensorControl
Sensor System
Track Extraction
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
source of information: received waveforms (space-time)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
detection: a decision process for data rate reduction
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
data fusion input: estimated target parameters, false plots
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
core function: associate sensor data to established tracks
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
track maintenance: updating of established target tracks
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
initiation: establish new tracks, re-initiate lost tracks
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
exploit available context information (e.g. topography)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
fusion/management of pre-processed track information
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Track AssociationSensor Data to Track File
Storage
Track Maintenance:
Retrodiction Prediction, Filtering
Sensing Hardware:
Signal Processing:
Parameter Estimation
Received Waveforms
Detection Process:
Data Rate Reduction
Track Initiation:
Multiple Frame
− Object Environment− Object Characteristics
A Priori Knowledge:
− Sensor Performance
Track Processing:
− Interaction Facilities− Displaying Functions− Object Representation
SensorData
SensorControl
Sensor System
Track Extraction
Man−Machine Interface:
− Track−to−Track Fusion
− Track Cancellation− Object Classification / ID
Tracking & Fusion System
user interface: presentation, interaction, decision support
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Target Tracking: Basic Idea, Demonstration
Problem-inherent uncertainties and ambiguities!BAYES: processing scheme for ‘soft’, ‘delayed’ decision
sensor performance: • resolution conflicts • DOPPLER blindness
environment: • dense situations • clutter • jamming/deception
target characteristics: • qualitatively distinct maneuvering phases
background knowledge • vehicles on road networks • tactics
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
‘Probability densities functions (pdf)’ p(x
k�1|Zk�1) represent imprecise
knowledge on the ‘state’ xk�1 based on imprecise measurements Zk�1.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
Prädiktion: tk
Exploit imprecise knowledge on the dynamical behavior of the object.
p(x
k
|Zk�1)
| {z }prediction
=
Rdx
k�1 p(x
k
|xk�1)| {z }
dynamics
p(x
k�1|Zk�1)
| {z }old knowledge
.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
tk: kein plot
missing sensor detection: ‘data processing’ = prediction(not always: exploitation of ‘negative’ sensor evidence)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
Prädiktion: tk+1
missing sensor information: increasing knowledge dissipation
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
tk+1: ein plot
sensor information on the kinematical object state
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
Prädiktion: tk+1
likelihood(Sensormodell)
BAYES’ formula: p(x
k+1
|Zk+1
)
| {z }new knowledge
=
p(z
k+1
|xk+1
) p(x
k+1
|Zk
)
Rdx
k+1
p(z
k+1|{z}plot
|xk+1
) p(x
k+1
|Zk
)
| {z }prediction
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1(Bayes)
filtering = sensor data processing
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
tk+1: drei plots
ambiguities by false plots: 1 + 3 data interpretation hypotheses(‘detection probability’, false alarm statistics)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
Multimodal pdfs reflect ambiguities inherent in the data.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
Prädiktion: tk+2
temporal propagation: dissipation of the probability densities
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
tk+2: ein plot
association tasks: sensor data$ interpretation hypotheses
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
Prädiktion: tk+2
likelihood
BAYES: p(x
k+2
|Zk+2
) =
p(z
k+2
|xk+2
) p(x
k+2
|Zk+1
)Rdx
k+2
p(z
k+2
|xk+2
) p(x
k+2
|Zk+1
)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
pdf: tk+2
in particular: re-calculation of the hypothesis weights
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
pdf: tk+1
pdf: tk+2
How does new knowledge affect the knowledge in the past of a past state?
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

pdf: tk−1
pdf: tk
Retrodiktion: tk+1
pdf: tk+2
‘retrodiction’: a retrospective analysis of the past
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

tk−1tk
tk+1
tk+2
optimal information processing at present and for the past
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Multiple Hypothesis Tracking: Basic IdeaIterative updating of conditional probability densities!
kinematic target state x
k
at time t
k
, accumulated sensor data Zk
a priori knowledge: target dynamics models, sensor model, road maps
• prediction: p(x
k�1|Zk�1)
dynamics model����������!road maps
p(x
k
|Zk�1)
• filtering: p(x
k
|Zk�1)
sensor data Z
k����������!sensor model
p(x
k
|Zk
)
• retrodiction: p(x
l�1|Zk
)
filtering output ����������dynamics model
p(x
l
|Zk
)
– finite mixture: inherent ambiguity (data, model, road network )– optimal estimators: e.g. minimum mean squared error (MMSE)– initiation of pdf iteration: multiple hypothesis track extraction
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Difficult Operational Conditions
object detection:– small objects: detection probability P
D
< 1– fading: consecutive missing plots (interference)– moving platforms: minimum detectable velocity
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Difficult Operational Conditions
object detection:– small objects: detection probability P
D
< 1– fading: consecutive missing plots (interference)– moving platforms: minimum detectable velocity
measurements:– false returns (residual clutter, birds, clouds)– low data update rates (long-range radar, e.g.)– measurement errors, overlapping gates
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Difficult Operational Conditions
object detection:– small objects: detection probability P
D
< 1– fading: consecutive missing plots (interference)– moving platforms: minimum detectable velocity
measurements:– false returns (residual clutter, birds, clouds)– low data update rates (long-range radar, e.g.)– measurement errors, overlapping gates
sensor resolution:– characteristic parameters band-/beam width– group measurements: resolution probability– important: qualitatively correct modeling
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Difficult Operational Conditions
object detection:– small objects: detection probability P
D
< 1– fading: consecutive missing plots (interference)– moving platforms: minimum detectable velocity
measurements:– false returns (residual clutter, birds, clouds)– low data update rates (long-range radar, e.g.)– measurement errors, overlapping gates
sensor resolution:– characteristic parameters band-/beam width– group measurements: resolution probability– important: qualitatively correct modeling
object behavior:– applications: high maneuvering capability– qualitatively distinct maneuvering phases– dynamic object parameters a priori unknown
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Demonstration: Multiple Hypothesis Tracking
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Tracking Application: Ground Picture Production
GMTI Radar: Ground Moving Target Indicator
wide area, all-weather, day/night, real-time surveillance ofa dynamically evolving ground or near-to-ground situation
GMTI Tracking: Some Characteristic Aspectsbackbone of a ground picture: moving target tracks
• airborne, dislocated, mobile sensor platforms• vehicles, ships, ‘low-flyers’, radars, convoys• occlusions: Doppler-blindness, topography• road maps, terrain information, tactical rules• dense target / dense clutter situations: MHT
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Examples of GMTI Tracks (live exercise)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

On Characterizing Tracking / Fusion Performance
a well-understood paradigm: air surveillance with multiple radars
Many results can be transfered to other sensors (IR, E/O, sonar, acoustics).
Sensor Data Fusion: ‘tracks’ represent the available information on the targetsassociated to them with appropriate quality measures, thus providing answers to:
When? Where? How many? To which direction? How fast, accelerating? What?
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

On Characterizing Tracking / Fusion Performance
a well-understood paradigm: air surveillance with multiple radars
Many results can be transfered to other sensors (IR, E/O, sonar, acoustics).
Sensor Data Fusion: ‘tracks’ represent the available information on the targetsassociated to them with appropriate quality measures, thus providing answers to:
When? Where? How many? To which direction? How fast, accelerating? What?
By sensor data fusion we wish to establish one-to-one associations between:
targets in the field of view $ identified tracks in the tracking computer
Strictly speaking, this is only possible under ideal conditions regarding the sensorperformance and underlying target situation. The tracking/fusion performance can thus
be measured by its deficiencies when compared with this ideal goal.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

1. Let a target be detected at first by a sensor at time t
a
. Usually, a timedelay is involved until a confirmed track has finally been establishedat time t
e
(track extraction). A ‘measure of deficiency’ is thus:
• extraction delay t
e
� t
a
.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

1. Let a target be detected at first by a sensor at time t
a
. Usually, a timedelay is involved until a confirmed track has finally been establishedat time t
e
(track extraction). A ‘measure of deficiency’ is thus:
• extraction delay t
e
� t
a
.
2. Unavoidably, false tracks will be extracted in case of a high falsereturn density (e.g. clutter, jamming/detection), i.e. tracks related tounreal or unwanted targets. Corresponding ‘deficiencies’ are:
• mean number of falsely extracted targets per time,• mean life time of a false track before its deletion.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

1. Let a target be detected at first by a sensor at time t
a
. Usually, a timedelay is involved until a confirmed track has finally been establishedat time t
e
(track extraction). A ‘measure of deficiency’ is thus:
• extraction delay t
e
� t
a
.
2. Unavoidably, false tracks will be extracted in case of a high falsereturn density (e.g. clutter, jamming/detection), i.e. tracks related tounreal or unwanted targets. Corresponding ‘deficiencies’ are:
• mean number of falsely extracted targets per time,• mean life time of a false track before its deletion.
3. A target should be represented by one and the same track until leav-ing the field of view. Related performance measures/deficiencies:
• mean life time of tracks related to true targets,• probability of an ‘identity switch’ between targets,• probability of a target not being represented by a track.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

4. The track inaccuracy (error covariance of a state estimate) should beas small as possible. The deviations between estimated and actualtarget states should at least correspond with the error covariancesproduced (consistency). If this is not the case, we speak of a ‘trackloss’.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

4. The track inaccuracy (error covariance of a state estimate) should beas small as possible. The deviations between estimated and actualtarget states should at least correspond with the error covariances pro-duced (consistency). If this is not the case, we speak of a ‘track loss’.
• A track must really represent a target!
Challenges:
• low detection probability • high clutter density • low update rate• agile targets • dense target situations • formations, convoys• target-split events (formation, weapons) • jamming, deception
Basic Tasks:
• models: sensor, target, environment ! physics
• data association problems ! combinatorics
• estimation problems ! probability, statistics
• process control, realization ! computer science
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Summary: BAYESian (Multi-) Sensor Tracking
• Basis: In the course of time one or several sensors produce measurements oftargets of interest. Each target is characterized by its current state vector, beingexpected to change with time.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Summary: BAYESian (Multi-) Sensor Tracking
• Basis: In the course of time one or several sensors produce measurements oftargets of interest. Each target is characterized by its current state vector, beingexpected to change with time.
• Objective: Learn as much as possible about the individual target states at eachtime by analyzing the ‘time series’ which is constituted by the sensor data.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Summary: BAYESian (Multi-) Sensor Tracking
• Basis: In the course of time one or several sensors produce measurements oftargets of interest. Each target is characterized by its current state vector, beingexpected to change with time.
• Objective: Learn as much as possible about the individual target states at eachtime by analyzing the ‘time series’ which is constituted by the sensor data.
• Problem: imperfect sensor information: inaccurate, incomplete, and eventuallyambiguous. Moreover, the targets’ temporal evolution is usually not well-known.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Summary: BAYESian (Multi-) Sensor Tracking
• Basis: In the course of time one or several sensors produce measurements oftargets of interest. Each target is characterized by its current state vector, beingexpected to change with time.
• Objective: Learn as much as possible about the individual target states at eachtime by analyzing the ‘time series’ which is constituted by the sensor data.
• Problem: imperfect sensor information: inaccurate, incomplete, and eventuallyambiguous. Moreover, the targets’ temporal evolution is usually not well-known.
• Approach: Interpret measurements and target vectors as random variables(RVs). Describe by probability density functions (pdf) what is known about them.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Summary: BAYESian (Multi-) Sensor Tracking
• Basis: In the course of time one or several sensors produce measurements oftargets of interest. Each target is characterized by its current state vector, beingexpected to change with time.
• Objective: Learn as much as possible about the individual target states at eachtime by analyzing the ‘time series’ which is constituted by the sensor data.
• Problem: imperfect sensor information: inaccurate, incomplete, and eventuallyambiguous. Moreover, the targets’ temporal evolution is usually not well-known.
• Approach: Interpret measurements and target vectors as random variables(RVs). Describe by probability density functions (pdf) what is known about them.
• Solution: Derive iteration formulae for calculating the pdfs! Develop a mech-anism for initiation! By doing so, exploit all background information available!Derive state estimates from the pdfs along with appropriate quality measures!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

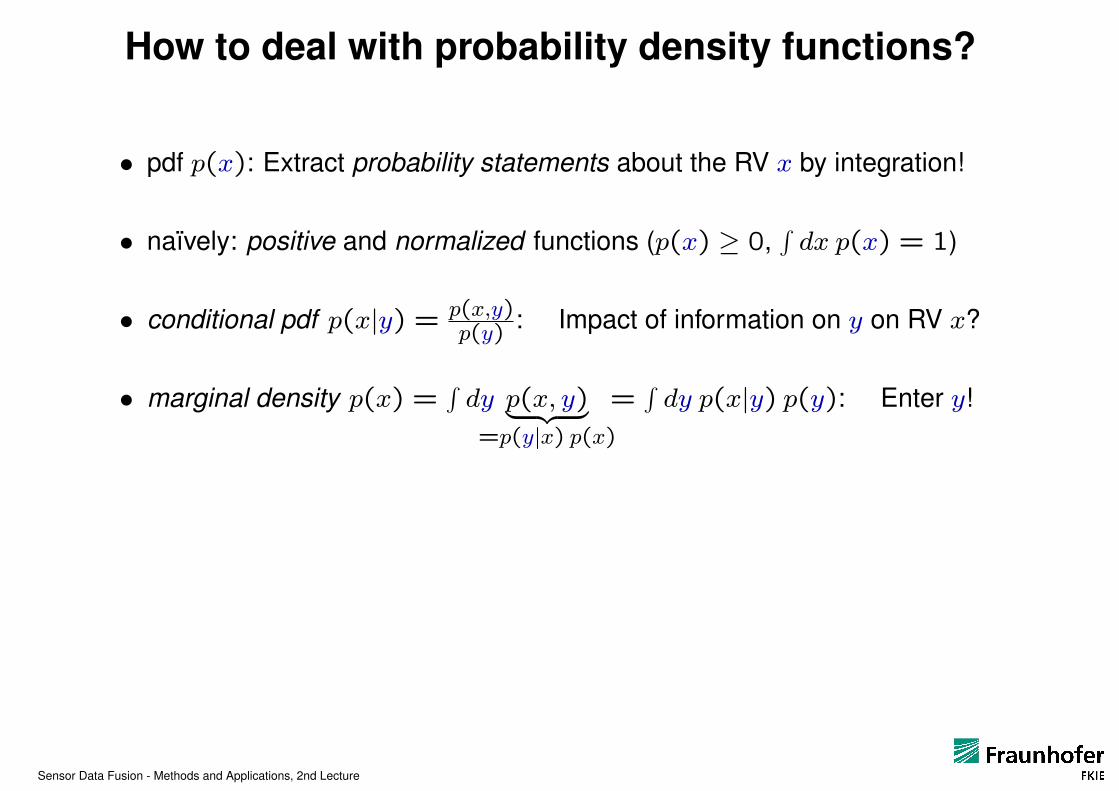
How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015
How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
• marginal density p(x) =
Rdy p(x, y)| {z }=p(y|x) p(x)
=
Rdy p(x|y) p(y): Enter y!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
• marginal density p(x) =
Rdy p(x, y) =
Rdy p(x|y) p(y): Enter y!
• Bayes: p(x|y)= p(y|x)p(x)p(y)
=
p(y|x)p(x)Rdx p(y|x)p(x): p(x|y) p(y|x), p(x)!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
• marginal density p(x) =
Rdy p(x, y) =
Rdy p(x|y) p(y): Enter y!
• Bayes: p(x|y)= p(y|x)p(x)p(y)
=
p(y|x)p(x)Rdx p(y|x)p(x): p(x|y) p(y|x), p(x)!
• certain knowledge on x: p(x) = �(x� y) ‘=’ lim�!0
1p2⇡�
e
�1
2
(x�y)2�
2
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
• marginal density p(x) =
Rdy p(x, y) =
Rdy p(x|y) p(y): Enter y!
• Bayes: p(x|y)= p(y|x)p(x)p(y)
=
p(y|x)p(x)Rdx p(y|x)p(x): p(x|y) p(y|x), p(x)!
• certain knowledge on x: p(x) = �(x� y) ‘=’ lim�!0
1p2⇡�
e
�1
2
(x�y)2�
2
• transformed RV y = t[x]: p(y) =
Rdx p(y, x) =
Rdx p(y|x) p
x
(x)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to deal with probability density functions?
• pdf p(x): Extract probability statements about the RV x by integration!
• naıvely: positive and normalized functions (p(x) � 0,Rdx p(x) = 1)
• conditional pdf p(x|y) =
p(x,y)
p(y)
: Impact of information on y on RV x?
• marginal density p(x) =
Rdy p(x, y) =
Rdy p(x|y) p(y): Enter y!
• Bayes: p(x|y)= p(y|x)p(x)p(y)
=
p(y|x)p(x)Rdx p(y|x)p(x): p(x|y) p(y|x), p(x)!
• certain knowledge on x: p(x) = �(x� y) ‘=’ lim�!0
1p2⇡�
e
�1
2
(x�y)2�
2
• transformed RV y = t[x]: p(y) =
Rdxp(y, x) =
Rdxp(y|x)p
x
(x) =
Rdx �(y � t[x]) p
x
(x) =: [T p
x
](y) (T : p
x
7! p, “transfer operator”)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Characterize an object by quantitativelydescribable properties: object state
Examples:
– object position x on a strait line: x 2 R– kinematic state x = (r
>, r
>, r
>)
>, x 2 R9
position r = (x, y, z)
>, velocity r, acceleration r
– joint state of two objects: x = (x
>1
,x
>2
)
>
– kinematic state x, object extension X
z.B. ellipsoid: symmetric, positively definite matrix
– kinematic state x, object class class
z.B. bird, sailing plane, helicopter, passenger jet, ...
Learn unknown object states from imperfect measurements anddescribe by functions p(x) imprecise knowledge mathematically precisely!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Interpret unknown object states as random variables, x [1D] or x,X [vector / matrixvariate]), characterized by corresponding probability density functions (pdf).
The concrete shape of the pdf p(x) contains the full knowledge on x!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Information on a random variable (RV) can be extractedby integration from the corresponding pdf. !
at present: one dimensional case:
How probable is it that x 2 (a, b) ✓ R holds?
Answer: P{x 2 (a, b)} =
Zb
a
dx p(x) ) p(x) � 0
in particular: P{x 2 R} =
Z 1
�1dx p(x) = 1 (normalzation)
intuitive interpretation: “the object is somewhere in R”
loosely: p(x) dx is probabity for x having a value between x and x+ dx
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to characterize the properties of a pdf?
specifically: How to associate a single “expected” value to a RV?
The maximum of the pdf is sometimes but not always useful!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to characterize the properties of a pdf?
specifically: How to associate a single “expected” value to a RV?
The maximum of the pdf is sometimes but not always useful! (! examples)
instead: Calculate the centroid of the pdf!
E[x] =Z 1
�1dx x p(x) = x “expectation value”
more generally: Consider functions g : x 7! g(x) of the RV x!
E[g(x)] =Z 1
�1dx g(x) p(x), “expectation value of the observable g”’
Example: Consider the observable 1
2
mx
2 (kinetic energy, x = speed)
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

An important observable: the “error” of an estimate
• Quality: How useful is an expectation value x = E[x]?
Consider special obervables as distance measure:
g(x) = |x� x| oder g(x) = (x� x)
2
quadratic measures: computationally more comfortable!
‘expected error’ of the expectation value x:
V[x] = E[(x� x)
2
], �x
=
pV[x]
variance, standard deviation
Exercise 2.1Show that
V[x] = E[x2]� E[x]2holds.
Expectation value of the observable x
2 also called “2nd moment” of the pdf of x.
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Exercise 2.2
Calculate expectation and variance of the uniform densityof a RV x 2 R in the intervall [a, b].
p(x) = U( x
|{z}ZV
; a, b
|{z}Parameter
) =
8<
:
1
b�a x 2 [a, b]
0 sonst!
Pdf correctly normalized?Z 1
�1dx U(x; a, b) =
1
b� a
Zb
a
dx = 1
E[x] =Z 1
�1dx x U(x; a, b) =
b+ a
2
V[x] = 1
b� a
Zb
a
dx x
2 � E[x]2 =
1
12
(b� a)
2
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Important example: x normally distributed over R (Gauß)
– wanted: probabilities concentrated around µ
– quadratic distance: ||x�µ||2 =
1
2
(x�µ)
2
/�
2 (mathematically convenient!)
– Parameter � is a measure of the “width” of the pdf: ||�||2 =
1
2
– for ‘large’ distances, i.e. ||x� µ||2 � 1
2
, the pdf shall decay quickly.
– simplest approach: p(x) = e
�||x�µ||2 (> 0 8x 2 R, normalization?)
– Normalized for p(x) = p(x)/
R1�1 dx p(x)!
Formula collection delivers:Z 1
�1dx p(x) =
p2⇡�
An admissible pdf with the required properties is obviously given by:
N (x;µ,�) =
1p2⇡�
exp
�(x� µ)
2
2�
2
!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Exercise 2.3Show for the Gauß density p(x) = N (x;µ,�):
E[x] = µ, V[x] = �
2
E[x] =Z 1
�1dx xN (x;µ,�) = µ
V[x] = E[x2]� E[x]2 = �
2
Use substitution and partial integration!
UseR1�1 dx e
�1
2
x
2
=
p2⇡!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

How to incorporate certain knowledge into pdfs?
Consider the special pdf: 1ly sharp peak at µ
�(x;µ) ‘=’
8<
:1 x = µ
0 x 6= µ
holding:Z 1
�1dx �(x;µ) = 1
Intuitively interpretable as a limit:
�(x;µ) ‘=’ lim
�!0
N (x;µ,�) = lim
�!0
1p2⇡�
e
�1
2
(x�µ)2�
2
Alternative: �(x; a) ‘=’ lim
b!a
U(x; a, b)
For observables g this holds: E[g(x)] =Z 1
�1dx g(x) �(x; y) = g(y)
in particular: V[x] = E[(x� E[x])2] = E[x2]� E[x]2 = 0
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015

Characterize an object by quantitativelydescribable properties: object state
Examples:
– object position x on a strait line: x 2 R X– kinematic state x = (r
>, r
>, r
>)
>, x 2 R9
position r = (x, y, z)
>, velocity r, acceleration r
– joint state of two objects: x = (x
>1
,x
>2
)
>
– kinematic state x, object extension X
z.B. ellipsoid: symmetric, positively definite matrix
– kinematic state x, object class class
z.B. bird, sailing plane, helicopter, passenger jet, ...
Learn unknown object states from imperfect measurements anddescribe by functions p(x) imprecise knowledge mathematically precisely!
Sensor Data Fusion - Methods and Applications, 2nd Lecture on October 28, 2015











![[FRC 2013] Sensor Fusion Tutorial](https://img.dokumen.tips/doc/110x75/577cda041a28ab9e78a4a5e4/frc-2013-sensor-fusion-tutorial.jpg)















![[FRC 2012] Sensor Fusion Tutorial](https://img.dokumen.tips/doc/110x75/577cdfcd1a28ab9e78b20184/frc-2012-sensor-fusion-tutorial.jpg)
