Embed Size (px)
Citation preview

Introduction to programmingwith Matlab/Python
— Lecture 2
Brian Thorsbro
Department of Astronomyand Theoretical Physics,Lund University, Sweden.
Monday, November 6, 2017
Courses
These lectures are a mini-series companion to:
ASTM13 Dynamical Astronomy
ASTM21 Statistical tools in Astrophysics
Matlab installed in the lab (Lyra). Personal laptops are OK!Install Matlab from: http://program.ddg.lth.se/Install Python3 from: https://www.anaconda.com/download/
Brian Thorsbro 1/26

Matlab
Install from: http://program.ddg.lth.se/
Brian Thorsbro 2/26
Python/Spyder
Install version 3 from: https://www.anaconda.com/download/
Brian Thorsbro 3/26
Outline
Content in this lecture:
I Finding Oort’s constants(example computational task)
I Least Squares algorithm
I Functions and scope
I Performance
Brian Thorsbro 4/26

The Oort’s constants
In 1927 Jan Oort derived an empirical relation, such that byobserving nearby stars one could say something about the rotationcurve of the Galaxy. The relation is
Acos(2l) + B = Kµl ,
where A says says something about the shearing motion and Bdescribes the rotation of the Galaxy. K is a convenient unittransformation between mas/yr and km/s/kpc which allows us touse the Hipparcos database and compare our results to standardknown values of Oort’s constant (actually using Gaia DR1):
A = 15.3± 0.4 km/s/kpc, B = −11.9± 0.4 km/s/kpc.
(Bovy, 2017)
Brian Thorsbro 5/26
The Hipparcos Database
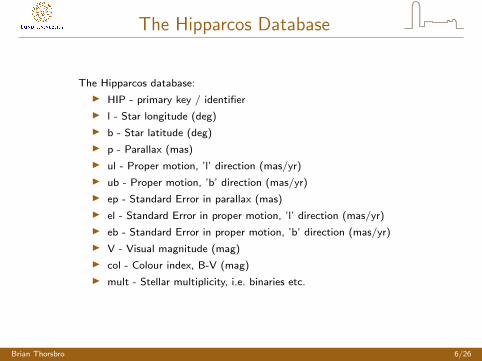
The Hipparcos database:
I HIP - primary key / identifier
I l - Star longitude (deg)
I b - Star latitude (deg)
I p - Parallax (mas)
I ul - Proper motion, ’l’ direction (mas/yr)
I ub - Proper motion, ’b’ direction (mas/yr)
I ep - Standard Error in parallax (mas)
I el - Standard Error in proper motion, ’l’ direction (mas/yr)
I eb - Standard Error in proper motion, ’b’ direction (mas/yr)
I V - Visual magnitude (mag)
I col - Colour index, B-V (mag)
I mult - Stellar multiplicity, i.e. binaries etc.
Brian Thorsbro 6/26

The equation system
With n = 116812 we have a large equation system:
Acos(2l1) + B = Kµl1... =
...
Acos(2ln) + B = Kµln ,
or: cos(2l1) 1...
...
cos(2ln) 1
(A
B
)= K
µl1...
µln
or:
X“design matrix”
(A
B
)= KY
Brian Thorsbro 7/26

Solving the equation system
Naive matrix manipulation suggests:
X
(A
B
)= KY
⇔ XTX
(A
B
)= XTKY
⇔
(A
B
)= (XTX )−1XTKY
Requires that (XTX ) is invertible.
Brian Thorsbro 8/26
Ordinary least squares
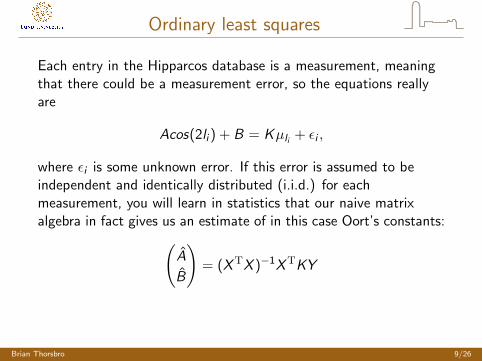
Each entry in the Hipparcos database is a measurement, meaningthat there could be a measurement error, so the equations reallyare
Acos(2li ) + B = Kµli + εi ,
where εi is some unknown error. If this error is assumed to beindependent and identically distributed (i.i.d.) for eachmeasurement, you will learn in statistics that our naive matrixalgebra in fact gives us an estimate of in this case Oort’s constants:(
A
B
)= (XTX )−1XTKY
Brian Thorsbro 9/26
Matlab preamble reminder
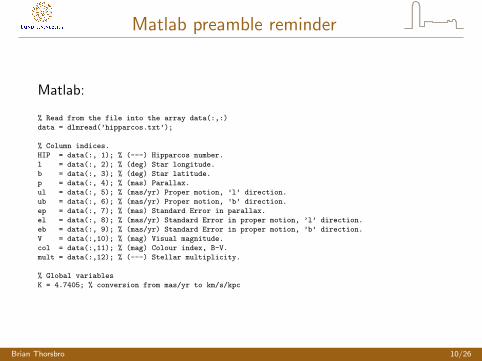
Matlab:
% Read from the file into the array data(:,:)
data = dlmread(’hipparcos.txt’);
% Column indices.
HIP = data(:, 1); % (---) Hipparcos number.
l = data(:, 2); % (deg) Star longitude.
b = data(:, 3); % (deg) Star latitude.
p = data(:, 4); % (mas) Parallax.
ul = data(:, 5); % (mas/yr) Proper motion, ’l’ direction.
ub = data(:, 6); % (mas/yr) Proper motion, ’b’ direction.
ep = data(:, 7); % (mas) Standard Error in parallax.
el = data(:, 8); % (mas/yr) Standard Error in proper motion, ’l’ direction.
eb = data(:, 9); % (mas/yr) Standard Error in proper motion, ’b’ direction.
V = data(:,10); % (mag) Visual magnitude.
col = data(:,11); % (mag) Colour index, B-V.
mult = data(:,12); % (---) Stellar multiplicity.
% Global variables
K = 4.7405; % conversion from mas/yr to km/s/kpc
Brian Thorsbro 10/26
Python preamble reminder
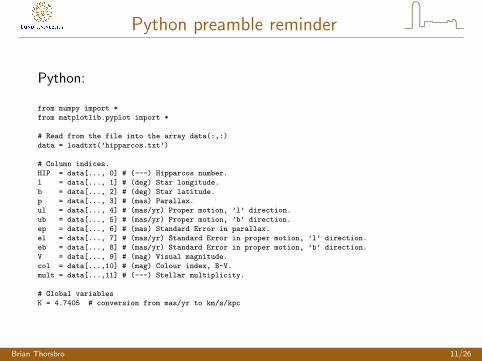
Python:
from numpy import *
from matplotlib.pyplot import *
# Read from the file into the array data(:,:)
data = loadtxt(’hipparcos.txt’)
# Column indices.
HIP = data[..., 0] # (---) Hipparcos number.
l = data[..., 1] # (deg) Star longitude.
b = data[..., 2] # (deg) Star latitude.
p = data[..., 3] # (mas) Parallax.
ul = data[..., 4] # (mas/yr) Proper motion, ’l’ direction.
ub = data[..., 5] # (mas/yr) Proper motion, ’b’ direction.
ep = data[..., 6] # (mas) Standard Error in parallax.
el = data[..., 7] # (mas/yr) Standard Error in proper motion, ’l’ direction.
eb = data[..., 8] # (mas/yr) Standard Error in proper motion, ’b’ direction.
V = data[..., 9] # (mag) Visual magnitude.
col = data[...,10] # (mag) Colour index, B-V.
mult = data[...,11] # (---) Stellar multiplicity.
# Global variables
K = 4.7405 # conversion from mas/yr to km/s/kpc
Brian Thorsbro 11/26
Setting up the design matrix
Preparing for the ordinary least square calculation.
Matlab:
% Setting up the design matrix
X = [ cosd(2*l) ones(size(l,1),1) ]; % A * cosd(2*l) + B
Y = (K*ul); % putting into unit of km/s/pc
Python (with numpy library):
# Setting up the design matrix
X = transpose(matrix([cos(2*l*pi/180),ones(size(l))])) # A * cosd(2*l) + B
Y = transpose(matrix(K*ul)) # putting into unit of km/s/pc
Brian Thorsbro 12/26
Doing the least square
Performing the least square calculation.
Matlab:
% Finding the Oort’s constants using a least square fit
P = inv(X’ * X) * X’ * Y;
%P = X \ Y;
Python (with numpy library):
# Finding the Oort’s constants using a least square fit
P = linalg.inv(X.T * X) * X.T * Y
#P = linalg.lstsq(X,Y)[0]
P is then a 2x1 matrix (remember “really cool”), i.e.
P =
(A
B
).
Brian Thorsbro 13/26
Residuals
The residual is the difference between the value measured and thevalue expected by our statistical model:
ε = Y − Y = Y − XP.
From the residuals the standard deviation of the residuals can beestimated
σ2ε =
εT · εn − p
,
where n is the sample size and p the degrees of freedoms used forestimations (columns in the design matrix).
Brian Thorsbro 14/26
Residuals
The variance-covariance matrix is defined as
C = (XTX ) · σ2ε =
(σ2A ·· σ2
B
).
Note that the uncertainty of the two Oort’s constants are on thediagonal. We are usually not interested in the off-diagonalelements as they are the covariance values, which should all be verysmall preferably, to claim independence between the parameters.
Brian Thorsbro 15/26
Calculating the residuals
Finding the residuals.
Matlab:
% Calculating the residuals
ehat = Y - X*P;
sigma_e_squared = dot(ehat,ehat) / (size(X,1) - size(X,2));
C = inv(X’ * X) * sigma_e_squared;
Python (with numpy library):
# Calculating the residuals
ehat = Y - X*P
sigma_e_squared = (ehat.T * ehat)[0,0] / (size(X,0) - size(X,1))
C = linalg.inv(X.T * X) * sigma_e_squared
Brian Thorsbro 16/26
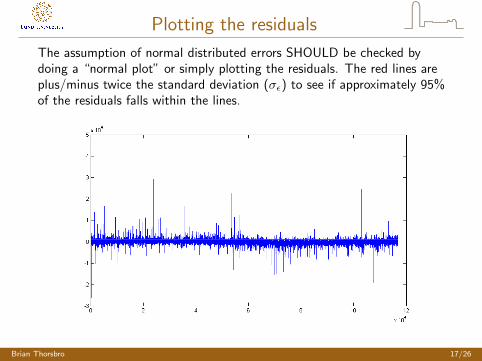
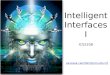
Plotting the residuals
The assumption of normal distributed errors SHOULD be checked bydoing a “normal plot” or simply plotting the residuals. The red lines areplus/minus twice the standard deviation (σε) to see if approximately 95%of the residuals falls within the lines.
Brian Thorsbro 17/26
Plotting the residuals
Plotting the residuals.
Matlab:
% Plotting the errors
figure(1)
hold on
plot(1:length(ehat),ehat,’-b’)
plot([1 length(ehat)],[2*sqrt(sigma_e_squared) 2*sqrt(sigma_e_squared)],’-r’)
plot([1 length(ehat)],[-2*sqrt(sigma_e_squared) -2*sqrt(sigma_e_squared)],’-r’)
hold off
Python (with numpy and matplotlib.pyplot libraries):
# Plotting the errors
figure(1)
plot(arange(0,size(ehat)),ehat,’-b’)
plot([0 , size(ehat)-1],[2*sqrt(sigma_e_squared) , 2*sqrt(sigma_e_squared)],’-r’)
plot([0 , size(ehat)-1],[-2*sqrt(sigma_e_squared) , -2*sqrt(sigma_e_squared)],’-r’)
Brian Thorsbro 18/26
Extracting the results
Now that Oort’s constants and their uncertainties has beenestimated the result can be displayed.
Matlab:
% Printing the result
A = P(1);
B = P(2);
SigmaA = sqrt(C(1,1));
SigmaB = sqrt(C(2,2));
display([’Data set size: ’, num2str(size(l,1))]);
display([’A = ’, num2str(A), ’ +/- ’, num2str(SigmaA)]);
display([’B = ’, num2str(B), ’ +/- ’, num2str(SigmaB)]);
Python (with numpy library):
# Printing the result
A = P[0,0]
B = P[1,0]
SigmaA = sqrt(C[0,0])
SigmaB = sqrt(C[1,1])
print(’Data set size: {}’.format(size(l)))
print(’A = {:.3f} +/- {:.3f}’.format(A,SigmaA))
print(’B = {:.3f} +/- {:.3f}’.format(B,SigmaB))
Brian Thorsbro 19/26
Printing the results
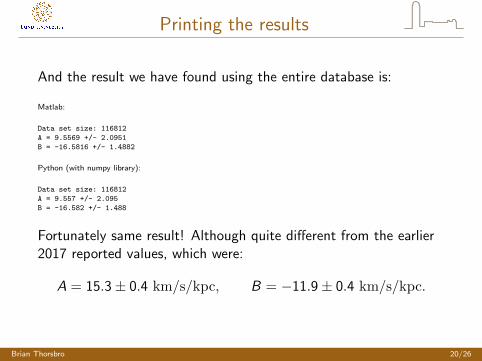
And the result we have found using the entire database is:
Matlab:
Data set size: 116812
A = 9.5569 +/- 2.0951
B = -16.5816 +/- 1.4882
Python (with numpy library):
Data set size: 116812
A = 9.557 +/- 2.095
B = -16.582 +/- 1.488
Fortunately same result! Although quite different from the earlier2017 reported values, which were:
A = 15.3± 0.4 km/s/kpc, B = −11.9± 0.4 km/s/kpc.
Brian Thorsbro 20/26
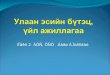
Check data vs. result
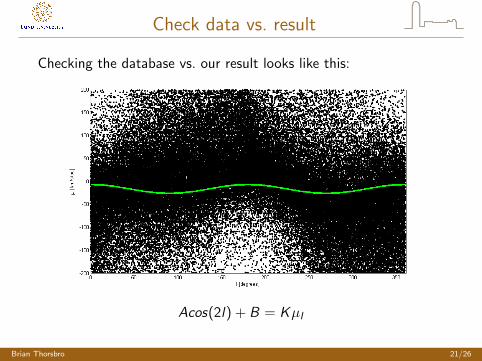
Checking the database vs. our result looks like this:
Acos(2l) + B = Kµl
Brian Thorsbro 21/26
Functions
Setting up functions can help greatly.
Matlab:
% Setting up the Oort fitted function for convenience
oort = @(x) (A * cosd(2*x) + B);
Python (with numpy library):
# Setting up the Oort fitted function for convenience
def oort(x):
return A * cos(2*x*pi/180) + B
Note the global scope of A and B!
Matlab likes having functions in separate files, that can then beused directly if placed in the same folder as your script.
Python likes local functions inside the script file, but you can putthem in another file. However, then you need to “import” thefunction from that file.
Brian Thorsbro 22/26
Using the functions
When defined they can be used easily.
Matlab:
% Plotting the data and the oort fitting
figure(2);
degreerange = 0:1:361;
plot(l,K*ul,’k.’,degreerange,oort(degreerange),’g-’,’LineWidth’,3);
axis([0 361 -200 200]);
xlabel(’l [degrees]’);
ylabel(’\mu_l [km/s/pc]’);
Python (with numpy library):
# Plotting the data and the oort fitting
figure(2);
degreerange = arange(0,361)
plot(l,K*ul,’k.’,degreerange,oort(degreerange),’g-’,’LineWidth’,3);
xlim(0,360)
ylim(-200,200)
xlabel(’l [degrees]’);
ylabel(’\mu_l [km/s/pc]’);
Brian Thorsbro 23/26
Tracking performance
Tracking performance is important to discover bottlenecks in yourcode.
Matlab:
tic
for i = 1:100
P = inv(X’ * X) * X’ * Y;
end
toc
tic
for i = 1:100
P = X \ Y;
end
toc
Output:
Elapsed time is 0.129592 seconds.
Elapsed time is 0.349005 seconds.
In matlab “toc” prints out the time elapsed for you.
Brian Thorsbro 24/26

Tracking performance
Tracking performance is important to discover bottlenecks in yourcode.
Python (with numpy and timit libraries):
import timeit
tic = timeit.default_timer()
for i in range(0,100):
P = linalg.inv(X.T * X) * X.T * Y
toc = timeit.default_timer()
print(toc-tic)
tic = timeit.default_timer()
for i in range(0,100):
P = linalg.lstsq(X,Y)[0]
toc = timeit.default_timer()
print(toc-tic)
Output:
0.12253564078859469
0.18159674188904162
In python the time returns seconds passed and you can print outthe difference manually.
Brian Thorsbro 25/26

The End
Questions?
Brian Thorsbro 26/26