Embed Size (px)
Citation preview

Research ArticleIntegrated Vibration Control of In-Wheel Motor-SuspensionsCoupling System via Dynamics Parameter Optimization
Wei Wang 1 Mu Niu1 and Yuling Song 123
1College of Mechanical and Electronic Engineering Northwest AampF University Yangling Shaanxi 712100 China2Key Laboratory of Agricultural Internet of (ings Ministry of Agriculture and Rural Affairs Yangling Shaanxi 712100 China3Shaanxi Key Laboratory of Agricultural Information Perception and Intelligent Services Yangling Shaanxi 712100 China
Correspondence should be addressed to Yuling Song syl791026126com
Received 6 February 2019 Revised 28 March 2019 Accepted 2 May 2019 Published 28 August 2019
Academic Editor Adam Glowacz
Copyright copy 2019 Wei Wang et al is is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In order to integrally control the vibration of in-wheel motor- (IWM-) suspensions coupling system of an electric vehicle a novelnonlinear dynamics model of the coupling system which consists of the motor magnetic gap (MMG) is established Synthesizingsubtargets of the vertical vibration acceleration of bodywork the vertical deformation of tire the suspension travel and the verticalfluctuation of MMG a composite optimization mathematical model is set up Based on artificial fish swarm algorithm (AFSA) anovel dynamics parameter optimization method is proposed to search the optimal parameter combination existing in the nonlineardynamics model Simulation analyses demonstrate that the proposed optimization method is superior to genetic algorithm (GA)under the same optimization conditions and it can significantly decrease the fluctuation of MMG and improve ride comfort
1 Introduction
With the increase of energy crisis and environmental pol-lution it has become an important research goal to developzero emissions of electric vehicles (EVs) Among them theIWM-driven EVs have received a general attention due totheir advantages of simple vehicle layout high integratedcharacteristic flexible drive feature and so on
However this kind of driven form also brings new vi-bration problems that need to be solved In practice theMMG of IWM generates fluctuation under road excitationElectromagnetic force is a function of MMG [1ndash3] for whichthe changes of electromagnetic force caused by the fluctuationof MMG deteriorate the ride comfort of an electric wheelvehicle [4 5] Furthermore because the outer rotor of IWM isfixed on a hub the fluctuation of MMG affects the adhesionperformance between tire and ground [6] In addition motorbrake and other components are highly integrated in a wheelwhich makes the unsprung mass increase and leads to poordynamics behaviors [6] In view of the reasons mentionedabove some research studies have been done to reduce thevibration of electric wheel vehicle An advanced dynamicsdampingmotor systemwas proposed by Shao et al [7] which
isolates the IWM vibration by an in-wheel spring dampingelement that has internal damping effect is structural formbreaks through the concept of traditional suspension systemand provides theoretical support for the improvement ofsuspension structure Except for changing systematic struc-ture Pang et al [8] argued that it is also one of the mosteffective ways to adjust dynamics parameters for improvingthe performance of suspension system e experimentalresults from a quarter car test rig which were done by Mitraet al [9] show that mass and damping coefficient are the mostinfluential parameters for ride comfort erefore manyscholars focus their attention on optimizing the massdamping coefficient and stiffness coefficient of suspensionsystem and achieve many significant results in enhancing ridecomfort by using GA [10ndash14] Essentially the dynamicsparameter optimization of suspension system belongs to amultiobjective optimization problem (MOOP) which can besolved by using multiobjective optimization algorithm(MOOA) [15 16] Gadhvi et al [15] respectively usednondominated sorting genetic algorithm (NSGA) strengthPareto evolutionary algorithm (SPEA) and Pareto envelope-based selection algorithm (PESA) as tools for suspensionoptimization It is proved that the results of the threeMOOAs
HindawiShock and VibrationVolume 2019 Article ID 3702919 14 pageshttpsdoiorg10115520193702919
are different from each other in optimization effect us anappropriate MOOA plays an important role in solvingMOOPs e behaviors and evolutions of natural creaturesbring enlightenments to practical optimization problems[17 18] Recently the AFSA has been quickly developed emain behavior of fish used by the AFSA is fish stay near theirswarm to protect themselves from predators and meanwhilemaintain safe distances from nearby partners to search foodwithout collisions [19]e basic idea of AFSA adopted by Heet al [20] is partly derived from the aforementioned fishbehaviors e AFSA has been successfully applied to manydifferent fields such as the scheduling of renewable energysources in a microgrid [21] a multiobjective fuzzy disas-sembly balancing problem [22] and dynamic weapon targetassignment problem [23] because of its advantages of par-allelism global feature traceability and so on Since the AFSAhas a good ability to solve the above MOOP problems it is aviable means to optimize the key dynamics parameters of theIWM-suspensions coupling system based on the AFSA
To sum up the chassis structure of IWM-driven EV isdifferent from that of traditional vehicle for which someresearchers have designed new in-wheel spring-dampingelements to reduce control vibration of the chassis andimprove the ride comfort In addition to this method otherresearches mainly focus on the vibration reduction of sus-pension system by using advanced optimization methodsand different control methods Although the influences ofdynamics parameters on suspension system are revealed andthe developments of optimization methods provide newways for improving ride comfort the research on the dy-namics parameter optimization of IWM-suspensions cou-pling system is insufficient and the dynamics parameters ofIWM are usually overlooked which is an obstacle to theintegrated vibration control of IWM-suspensions couplingsystem and brings about unreasonable dynamics parametercombinations is is an important problem that needs to beurgently resolved
In this research synthetically considering the dynamicsparameters of IWM-suspensions coupling system a novelnonlinear dynamics model which consists of the MMG isestablished Based on the AFSA a novel dynamics parameteroptimization method is proposed by constructing optimi-zation mathematical model and constraints Eight key dy-namics parameters of the IWM-suspensions couplingsystem are optimized and the optimal parameter combi-nation is obtained e vibration control effect of the pro-posed method is numerically validated by comparing to
GArsquos optimization results under different road excitationse optimization method proposed by this paper has im-portant application prospects in the field of vehicularmultisystem integrated dynamics design and control egthe integrated design and control of electric wheel-steering-suspension system
2 Model and Problem Formulation
21 Dynamics Modeling e motor bearing that supportsthe rim is subjected to circumferential radial and axialforces which results in the relative displacement between thestator and the rotor and the fluctuation of MMG furtherdeteriorates the vibration of vehicle In this part the fluc-tuation of MMG caused by road excitation is mainly con-sidered and the incentive role of torque fluctuationproduced by motor structure processing error and prin-ciple factor is neglected because it is far less than the roadexcitation [5] According to the actual structure of IWM-suspensions coupling system described in Figure 1 aquarter-car nonlinear vibration model is established andshown in Figure 2 Different from the traditional one thisnonlinear IWM-suspensions coupling system uses a sus-pension element to elastically isolate the overall IWM massfrom unsprung mass (see Figure 1)
Currently nonlinear components are widely applied tovehicle systems because of their predominant dampingperformances Most vehicles universally use nonlinearsuspensions and tires to reduce their vertical vibrationserefore the nonlinear stiffness characteristics of thesuspension 1 and tire are taken into account e elasticrestoring forces models of suspension 1 and the tire arerespectively expressed as [24]
Fs ks middot xs middot 1 + ε middot x2s1113872 1113873 (1)
Ft kt middot xt middot 1 + c middot x2t1113872 1113873 (2)
where Fs and Ft respectively represent the vertical elasticrestoring forces of suspension 1 and the tire ks and kt arerespectively the stiffness coefficients of suspension 1 and thetire xs and xt are respective vertical deformations of sus-pension 1 and the tire ε and c are nonlinearity coefficients
Based on formulae (1) and (2) referring to the quarter-car nonlinear vibration model shown in Figure 2 the motionequation of IWMsuspensions coupling system is written asfollows
m1 euroy1 + c1 _y1 minus _y0( 1113857 + c2 _y1 minus _y2( 1113857 + c7 _y1 minus _y5( 1113857 + k1 y1 minusy0( 1113857 + c middot k1 y1 minusy0( 11138573
+ k2 y1 minusy2( 1113857 + k7 y1 minusy5( 1113857 0
m2 euroy2 + c2 _y2 minus _y1( 1113857 + c3 _y2 minus _y3( 1113857 + c6 _y2 minus _y4( 1113857 + k2 y2 minusy1( 1113857 + k3 y2 minusy3( 1113857 + ε middot k3 y2 minusy3( 11138573
+ k6 y2 minusy4( 1113857 0
m3 euroy3 + c3 _y3 minus _y2( 1113857 + c4 _y3 minus _y4( 1113857 + k3 y3 minusy2( 1113857 + ε middot k3 y3 minusy2( 11138573
+ k4 y3 minusy4( 1113857 0
m4 euroy4 + c4 _y4 minus _y3( 1113857 + c5 _y4 minus _y5( 1113857 + c6 _y4 minus _y2( 1113857 + k4 y4 minusy3( 1113857 + k5 y4 minusy5( 1113857 + k6 y4 minusy2( 1113857 0
m5 euroy5 + c5 _y5 minus _y4( 1113857 + c7 _y5 minus _y1( 1113857 + k5 y5 minusy4( 1113857 + k7 y5 minusy1( 1113857 0
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
2 Shock and Vibration
wherem1 denotes the total mass of the tire and rimm2 is thetotal mass of the knighthead and brake clamp m3 is the massof the quarter bodywork m4 and m5 respectively denote themass of IWMrsquos stator and rotor y0 is harmonic road exci-tation y1 y2 y3 y4 and y5 respectively represent thevertical displacements of m1 m2 m3 m4 and m5 k1 and c1respectively denote the vertical sti ness and damping co-eshycients of the tire k2 and c2 respectively denote the verticalsti ness and damping coeshycients of hub bearing k3 and c3respectively denote the equivalent vertical sti ness anddamping coeshycients of suspension 1 (see Figure 1) k4 and c4respectively denote the sti ness and damping coeshycients ofsuspension 2 between motor stator and bodywork k5 and c5respectively represent the sti ness and damping coeshycients ofthe bearing between motor stator and rotor k6 and c6 re-spectively are the sti ness and damping coeshycients of sus-pension 3 between motor stator and knighthead k7 and c7respectively denote the vertical sti ness and damping co-eshycients of the bushing between the motor rotor and the rim
22 Model and Method of Optimization e AFSA has agood ability to overcome local extreme value and obtain
global optimal solution in search space [19] Here in ac-cordance with the experimental results by Mitra et al [9]eight key dynamics parameters of IWM-suspensions cou-pling system are chosen as design variablesey arem1 m3k3 k4 k6 c3 c4 and c6 respectively
221 Mathematical Model of Optimization Ride comfort isan important consideration in the design of vehicular sus-pension system particularly the performance evaluationindices of vehicular suspension system [25 26] Traditionalevaluation indices such as the vertical vibration accelerationof bodywork the vertical deformation of tire and suspen-sion travel can inuence the ride comfort of a vehicleHowever the uctuation of IWMrsquos MMG is neglected whichcan deteriorate the ride comfort So here the uctuation ofIWMrsquos MMG is added to the indices
Weighted-sum method is used to indicate the impor-tance of each index and connect subtargets into a compositeoptimization objective Root-mean-square (RMS) value isused to reduce the impact of contingency factors emathematical model of optimization problem is written as
F(f) min1
intt2t1
λ1f21RMS f2
1( )( ) + λ2f22RMS f2
2( )( ) + λ3f23RMS f2
3( )( ) + λ4f24RMS f2
4( )( )[ ]dt
(4)
Body
Suspension 1
Suspension 2
Brake clamp
Tire
Rim
Motor bearing
Suspension 3
Bushing
Hub bearing
Knighthead
SpindleStator
Motor magnet gapRotor
Figure 1 e structure of IWM-suspensions coupling system
y3
y2
y1
y0
m3 m5
m4
m2
m1
k4
k6
k7 c7
c6
k5
c3
c2
c1
c4 y4
y5
c5
k3
k2
k1
Figure 2 e quarter-car nonlinear vibration model
Shock and Vibration 3
subject tog1 l1 minus y2 minusy3
∣∣∣∣∣∣∣∣ge 0
g2 l2 minus y4 minusy5∣∣∣∣
∣∣∣∣ge 045(kg)lem1 le 60(kg)310(kg)lem3 le 350(kg)10(kNm)le k3 le 80(kNm)10(kNm)le k4 le 30(kNm)10(kNm)le k6 le 30(kNm)200(Nsm)le c3 le 2000(Nsm)100(Nsm)le c4 le 800(Nsm)10000(Nsm)le c6 le 35000(Nsm)
(5)
where f1 euroy3 f2 (y1 minusy0) f3 (y3 minusy2) andf4 (y5 minusy4) which respectively denote the vertical vi-bration acceleration of bodywork the vertical deformationof tire the suspension travel and the vertical uctuation ofIWMrsquosMMG F(f) is an objective function t1 0 s t210 sthis time period includes the transient and steady-stateresponse of dynamics system λ1 λ2 λ3 and λ4 are re-spectively the weighted value of each performance indexwhich are assigned to be 025 02 02 and 035 g1 and g2 areconstraints l1 9 cm and l2 05mm respectively denotethe suspension limit travel and the limit value of MMG
222 AFSA-Based Optimization Method and Proceduree number of articial shes (AFs) in sh swarm is denedas N and each AF that includes the 8 dynamics parameters(ie m1 m3 k3 k4 k6 c3 c4 and c6) is denoted by AFi(i 12 N) So AFi can be written as AFi [x1i x2i x8i]Twhere each element in the vector represents a dynamicsparameter In this way the sh swarm can be expressed byan 8timesNmatrix which is shown in Figure 3 Each column ofthe matrix represents an articial sh and its position
By substituting AFi into formula (4) the correspondingYi F(f ) can be obtained which is regarded as food con-centration in the current position (also means the tness inGA) As shown in Figure 4 Step is the AFrsquos movement sizeVisual is AFrsquos eld of view Try-number is dened as themaximum number of attempts of foraging behavior Toavoid overcrowding with the surrounding partners acongestion factor delta is set up which is expressed asfollows
delta 1
α middot nlimit (6)
where α represents the degree of approximation of extremesand it is a coeshycient between 0 and 1 nlimit is the maximumupper limit of the AFrsquos number existing in the eld of viewHere we choose α 09 and nlimit 2
e initial data of each AF in articial sh swarmmust be dened in advance which can be randomlygenerated within their denition domains [10 27]Without losing of generality the i-th AF is denoted asAFi [m1i m3i k3i k4i k6i c3i c4i c6i]
T After initializing
an articial sh swarm the AFs in the sh swarm searchthe optimal solution by iterations During each iterationthe AFs update themselves by the following steps
(1) Random Moving Behavior and Foraging BehaviorRandom moving behavior is a kind of default foragingbehavior during which AFi randomly selects a state AFjwithin its visual (formula (7)) and then moves one step to anew position AFnext (formula (8)) In the foraging behaviorthe AF always tries to move to a better place based on thefood concentration which lays the foundation ofconvergence
AFj m1i m3i k3i k4i k6i c3i c4i c6i[ ]T + visual times amn( )8times1(7)
where amn is an uniformly distributed random number overthe interval [minus1 1] and amn ne 0
AFnext m1i m3i k3i k4i k6i c3i c4i c6i[ ]T
+ β times step timesAFj minusAFiAFj minusAFi
(8)
where β min(|αmn|) (Pseudocode 1)
(2) Swarm Behavior is behavior enables AFi to move asmuch as possible to the center of nearby partners AFcenter
A dynamic parameterthat needs to be
optimized
An artificial fish
e number of artificial fish is N
e n
umbe
r of d
ynam
ic p
aram
eter
s is 8
x11 x12 x13 x1N
x22 x23 x2N
x32 x33
x3N
x82 x83 x8N
x21
x31
x81
Figure 3 e expression of articial sh swarm
Visual
Step
Figure 4 AFrsquos visual and moving step
4 Shock and Vibration
and avoid egregious overcrowding e center of nearbypartners is given by
AFcenter 1113936
nfj+1AFj
nf (9)
where nf is the number of nearby partners that is calculatedby using the formula AFj minusAFile visual e criteria forjudging congestion are given by formula (10) which decideswhether to follow formula (11)
Ycenter
Yi middot nfgt delta (10)
where Ycenter represents the food concentration of AFcenter
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFcenter minusAFi
AFcenter minusAFi
(11)
where rand() is an random number over the interval (0 1)(Pseudocode 2)
(3) Following Behavior AFi searches for partners within itsvisual and selectively moves to the one with the highest foodconcentration If formula (12) is satisfied AFi movesaccording to formula (13)
Ymax
Yi middot nfgt delta (12)
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFmax minusAFi
AFmax minusAFi
(13)
where AFmax is the AF with the highest food concentrationYmax (Pseudocode 3)
e dynamics parameter optimization procedure ofnonlinear IWM-suspensions coupling system is shown inFigure 5
3 Optimization Results
e overall dynamics parameter optimization procedureis executed by Matlab software In order to easily choose
Step and Visual and accelerate convergence during theoptimization process all the design variables are reduced totwo digits and then the optimization results are zoomedout to the same multiple e GA-based multiparameteroptimization scheme is used for comparison with theproposed optimization method which includes codingcrossing mutation and selecting operations [10] Roadexcitation is simulated by the harmonic function describedin formula (15)
(1) e parameters involved in the proposed optimi-zation method are set up as below
(i) Number of AF 15(ii) Max iteration 1000(iii) Step 05(iv) Visual 5(v) Try-number 3(vi) Delta 05556
(2) e selected optimization conditions for GA
(i) Number of individuals 15(ii) Max iteration 1000(iii) Crossover rate 09(iv) Mutation rate 05(v) Selecting rate 08
For the established motion equation of nonlinear IWM-suspensions coupling system the nonlinear coefficients c
and ε are both assigned to be 05 e dynamics parameteroptimization results are shown in Table 1 where the originaldynamics parameters of nonlinear IWM-suspensions cou-pling system are listed [28]
e larger the fish swarm the greater the ability to jumpout from the local extreme value and the faster the con-vergence rate but the amount of each iteration calculationis also greater Numerical experiments show that when thenumber of AF is 15 the amount of calculation and theconvergence rate reach a good balance e changes of foodconcentration calculated by the proposed method areshown in Figure 6 It can be seen that the food concen-tration increases from 5693 times10minus3 to 6491 times 10minus3 step bystep within 1000 iterations From the whole optimizationprocedure the food concentration breaks though localextreme values for four times and eventually reaches aglobal extreme value is phenomenon interprets theglobal convergence characteristic of the proposed opti-mization method e iteration process of each parameteris shown in Figures 7(a)ndash7(h) from which it is easy to seethat c3 achieves convergence faster than other parametersc3 and c4 finally converge to the boundaries of their defi-nition domains
4 Simulation Analyses of OptimizationControl Effects
In this Section numerical simulations are executed tocompare and verify the optimization control effects of theproposed method and GA Rough and bump road excita-tions simulated by harmonic functions [2] are used to
for 1 to try-numberrandomly select a new position (formula (7))if beyond the definition domainselect boundary value
if the food concentration of the new position is highermove a step to the next position (formula (8))break
endif foraging behavior failsrandomly select a position
end
PSEUDOCODE 1
Shock and Vibration 5
evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

are different from each other in optimization effect us anappropriate MOOA plays an important role in solvingMOOPs e behaviors and evolutions of natural creaturesbring enlightenments to practical optimization problems[17 18] Recently the AFSA has been quickly developed emain behavior of fish used by the AFSA is fish stay near theirswarm to protect themselves from predators and meanwhilemaintain safe distances from nearby partners to search foodwithout collisions [19]e basic idea of AFSA adopted by Heet al [20] is partly derived from the aforementioned fishbehaviors e AFSA has been successfully applied to manydifferent fields such as the scheduling of renewable energysources in a microgrid [21] a multiobjective fuzzy disas-sembly balancing problem [22] and dynamic weapon targetassignment problem [23] because of its advantages of par-allelism global feature traceability and so on Since the AFSAhas a good ability to solve the above MOOP problems it is aviable means to optimize the key dynamics parameters of theIWM-suspensions coupling system based on the AFSA
To sum up the chassis structure of IWM-driven EV isdifferent from that of traditional vehicle for which someresearchers have designed new in-wheel spring-dampingelements to reduce control vibration of the chassis andimprove the ride comfort In addition to this method otherresearches mainly focus on the vibration reduction of sus-pension system by using advanced optimization methodsand different control methods Although the influences ofdynamics parameters on suspension system are revealed andthe developments of optimization methods provide newways for improving ride comfort the research on the dy-namics parameter optimization of IWM-suspensions cou-pling system is insufficient and the dynamics parameters ofIWM are usually overlooked which is an obstacle to theintegrated vibration control of IWM-suspensions couplingsystem and brings about unreasonable dynamics parametercombinations is is an important problem that needs to beurgently resolved
In this research synthetically considering the dynamicsparameters of IWM-suspensions coupling system a novelnonlinear dynamics model which consists of the MMG isestablished Based on the AFSA a novel dynamics parameteroptimization method is proposed by constructing optimi-zation mathematical model and constraints Eight key dy-namics parameters of the IWM-suspensions couplingsystem are optimized and the optimal parameter combi-nation is obtained e vibration control effect of the pro-posed method is numerically validated by comparing to
GArsquos optimization results under different road excitationse optimization method proposed by this paper has im-portant application prospects in the field of vehicularmultisystem integrated dynamics design and control egthe integrated design and control of electric wheel-steering-suspension system
2 Model and Problem Formulation
21 Dynamics Modeling e motor bearing that supportsthe rim is subjected to circumferential radial and axialforces which results in the relative displacement between thestator and the rotor and the fluctuation of MMG furtherdeteriorates the vibration of vehicle In this part the fluc-tuation of MMG caused by road excitation is mainly con-sidered and the incentive role of torque fluctuationproduced by motor structure processing error and prin-ciple factor is neglected because it is far less than the roadexcitation [5] According to the actual structure of IWM-suspensions coupling system described in Figure 1 aquarter-car nonlinear vibration model is established andshown in Figure 2 Different from the traditional one thisnonlinear IWM-suspensions coupling system uses a sus-pension element to elastically isolate the overall IWM massfrom unsprung mass (see Figure 1)
Currently nonlinear components are widely applied tovehicle systems because of their predominant dampingperformances Most vehicles universally use nonlinearsuspensions and tires to reduce their vertical vibrationserefore the nonlinear stiffness characteristics of thesuspension 1 and tire are taken into account e elasticrestoring forces models of suspension 1 and the tire arerespectively expressed as [24]
Fs ks middot xs middot 1 + ε middot x2s1113872 1113873 (1)
Ft kt middot xt middot 1 + c middot x2t1113872 1113873 (2)
where Fs and Ft respectively represent the vertical elasticrestoring forces of suspension 1 and the tire ks and kt arerespectively the stiffness coefficients of suspension 1 and thetire xs and xt are respective vertical deformations of sus-pension 1 and the tire ε and c are nonlinearity coefficients
Based on formulae (1) and (2) referring to the quarter-car nonlinear vibration model shown in Figure 2 the motionequation of IWMsuspensions coupling system is written asfollows
m1 euroy1 + c1 _y1 minus _y0( 1113857 + c2 _y1 minus _y2( 1113857 + c7 _y1 minus _y5( 1113857 + k1 y1 minusy0( 1113857 + c middot k1 y1 minusy0( 11138573
+ k2 y1 minusy2( 1113857 + k7 y1 minusy5( 1113857 0
m2 euroy2 + c2 _y2 minus _y1( 1113857 + c3 _y2 minus _y3( 1113857 + c6 _y2 minus _y4( 1113857 + k2 y2 minusy1( 1113857 + k3 y2 minusy3( 1113857 + ε middot k3 y2 minusy3( 11138573
+ k6 y2 minusy4( 1113857 0
m3 euroy3 + c3 _y3 minus _y2( 1113857 + c4 _y3 minus _y4( 1113857 + k3 y3 minusy2( 1113857 + ε middot k3 y3 minusy2( 11138573
+ k4 y3 minusy4( 1113857 0
m4 euroy4 + c4 _y4 minus _y3( 1113857 + c5 _y4 minus _y5( 1113857 + c6 _y4 minus _y2( 1113857 + k4 y4 minusy3( 1113857 + k5 y4 minusy5( 1113857 + k6 y4 minusy2( 1113857 0
m5 euroy5 + c5 _y5 minus _y4( 1113857 + c7 _y5 minus _y1( 1113857 + k5 y5 minusy4( 1113857 + k7 y5 minusy1( 1113857 0
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
2 Shock and Vibration
wherem1 denotes the total mass of the tire and rimm2 is thetotal mass of the knighthead and brake clamp m3 is the massof the quarter bodywork m4 and m5 respectively denote themass of IWMrsquos stator and rotor y0 is harmonic road exci-tation y1 y2 y3 y4 and y5 respectively represent thevertical displacements of m1 m2 m3 m4 and m5 k1 and c1respectively denote the vertical sti ness and damping co-eshycients of the tire k2 and c2 respectively denote the verticalsti ness and damping coeshycients of hub bearing k3 and c3respectively denote the equivalent vertical sti ness anddamping coeshycients of suspension 1 (see Figure 1) k4 and c4respectively denote the sti ness and damping coeshycients ofsuspension 2 between motor stator and bodywork k5 and c5respectively represent the sti ness and damping coeshycients ofthe bearing between motor stator and rotor k6 and c6 re-spectively are the sti ness and damping coeshycients of sus-pension 3 between motor stator and knighthead k7 and c7respectively denote the vertical sti ness and damping co-eshycients of the bushing between the motor rotor and the rim
22 Model and Method of Optimization e AFSA has agood ability to overcome local extreme value and obtain
global optimal solution in search space [19] Here in ac-cordance with the experimental results by Mitra et al [9]eight key dynamics parameters of IWM-suspensions cou-pling system are chosen as design variablesey arem1 m3k3 k4 k6 c3 c4 and c6 respectively
221 Mathematical Model of Optimization Ride comfort isan important consideration in the design of vehicular sus-pension system particularly the performance evaluationindices of vehicular suspension system [25 26] Traditionalevaluation indices such as the vertical vibration accelerationof bodywork the vertical deformation of tire and suspen-sion travel can inuence the ride comfort of a vehicleHowever the uctuation of IWMrsquos MMG is neglected whichcan deteriorate the ride comfort So here the uctuation ofIWMrsquos MMG is added to the indices
Weighted-sum method is used to indicate the impor-tance of each index and connect subtargets into a compositeoptimization objective Root-mean-square (RMS) value isused to reduce the impact of contingency factors emathematical model of optimization problem is written as
F(f) min1
intt2t1
λ1f21RMS f2
1( )( ) + λ2f22RMS f2
2( )( ) + λ3f23RMS f2
3( )( ) + λ4f24RMS f2
4( )( )[ ]dt
(4)
Body
Suspension 1
Suspension 2
Brake clamp
Tire
Rim
Motor bearing
Suspension 3
Bushing
Hub bearing
Knighthead
SpindleStator
Motor magnet gapRotor
Figure 1 e structure of IWM-suspensions coupling system
y3
y2
y1
y0
m3 m5
m4
m2
m1
k4
k6
k7 c7
c6
k5
c3
c2
c1
c4 y4
y5
c5
k3
k2
k1
Figure 2 e quarter-car nonlinear vibration model
Shock and Vibration 3
subject tog1 l1 minus y2 minusy3
∣∣∣∣∣∣∣∣ge 0
g2 l2 minus y4 minusy5∣∣∣∣
∣∣∣∣ge 045(kg)lem1 le 60(kg)310(kg)lem3 le 350(kg)10(kNm)le k3 le 80(kNm)10(kNm)le k4 le 30(kNm)10(kNm)le k6 le 30(kNm)200(Nsm)le c3 le 2000(Nsm)100(Nsm)le c4 le 800(Nsm)10000(Nsm)le c6 le 35000(Nsm)
(5)
where f1 euroy3 f2 (y1 minusy0) f3 (y3 minusy2) andf4 (y5 minusy4) which respectively denote the vertical vi-bration acceleration of bodywork the vertical deformationof tire the suspension travel and the vertical uctuation ofIWMrsquosMMG F(f) is an objective function t1 0 s t210 sthis time period includes the transient and steady-stateresponse of dynamics system λ1 λ2 λ3 and λ4 are re-spectively the weighted value of each performance indexwhich are assigned to be 025 02 02 and 035 g1 and g2 areconstraints l1 9 cm and l2 05mm respectively denotethe suspension limit travel and the limit value of MMG
222 AFSA-Based Optimization Method and Proceduree number of articial shes (AFs) in sh swarm is denedas N and each AF that includes the 8 dynamics parameters(ie m1 m3 k3 k4 k6 c3 c4 and c6) is denoted by AFi(i 12 N) So AFi can be written as AFi [x1i x2i x8i]Twhere each element in the vector represents a dynamicsparameter In this way the sh swarm can be expressed byan 8timesNmatrix which is shown in Figure 3 Each column ofthe matrix represents an articial sh and its position
By substituting AFi into formula (4) the correspondingYi F(f ) can be obtained which is regarded as food con-centration in the current position (also means the tness inGA) As shown in Figure 4 Step is the AFrsquos movement sizeVisual is AFrsquos eld of view Try-number is dened as themaximum number of attempts of foraging behavior Toavoid overcrowding with the surrounding partners acongestion factor delta is set up which is expressed asfollows
delta 1
α middot nlimit (6)
where α represents the degree of approximation of extremesand it is a coeshycient between 0 and 1 nlimit is the maximumupper limit of the AFrsquos number existing in the eld of viewHere we choose α 09 and nlimit 2
e initial data of each AF in articial sh swarmmust be dened in advance which can be randomlygenerated within their denition domains [10 27]Without losing of generality the i-th AF is denoted asAFi [m1i m3i k3i k4i k6i c3i c4i c6i]
T After initializing
an articial sh swarm the AFs in the sh swarm searchthe optimal solution by iterations During each iterationthe AFs update themselves by the following steps
(1) Random Moving Behavior and Foraging BehaviorRandom moving behavior is a kind of default foragingbehavior during which AFi randomly selects a state AFjwithin its visual (formula (7)) and then moves one step to anew position AFnext (formula (8)) In the foraging behaviorthe AF always tries to move to a better place based on thefood concentration which lays the foundation ofconvergence
AFj m1i m3i k3i k4i k6i c3i c4i c6i[ ]T + visual times amn( )8times1(7)
where amn is an uniformly distributed random number overthe interval [minus1 1] and amn ne 0
AFnext m1i m3i k3i k4i k6i c3i c4i c6i[ ]T
+ β times step timesAFj minusAFiAFj minusAFi
(8)
where β min(|αmn|) (Pseudocode 1)
(2) Swarm Behavior is behavior enables AFi to move asmuch as possible to the center of nearby partners AFcenter
A dynamic parameterthat needs to be
optimized
An artificial fish
e number of artificial fish is N
e n
umbe
r of d
ynam
ic p
aram
eter
s is 8
x11 x12 x13 x1N
x22 x23 x2N
x32 x33
x3N
x82 x83 x8N
x21
x31
x81
Figure 3 e expression of articial sh swarm
Visual
Step
Figure 4 AFrsquos visual and moving step
4 Shock and Vibration
and avoid egregious overcrowding e center of nearbypartners is given by
AFcenter 1113936
nfj+1AFj
nf (9)
where nf is the number of nearby partners that is calculatedby using the formula AFj minusAFile visual e criteria forjudging congestion are given by formula (10) which decideswhether to follow formula (11)
Ycenter
Yi middot nfgt delta (10)
where Ycenter represents the food concentration of AFcenter
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFcenter minusAFi
AFcenter minusAFi
(11)
where rand() is an random number over the interval (0 1)(Pseudocode 2)
(3) Following Behavior AFi searches for partners within itsvisual and selectively moves to the one with the highest foodconcentration If formula (12) is satisfied AFi movesaccording to formula (13)
Ymax
Yi middot nfgt delta (12)
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFmax minusAFi
AFmax minusAFi
(13)
where AFmax is the AF with the highest food concentrationYmax (Pseudocode 3)
e dynamics parameter optimization procedure ofnonlinear IWM-suspensions coupling system is shown inFigure 5
3 Optimization Results
e overall dynamics parameter optimization procedureis executed by Matlab software In order to easily choose
Step and Visual and accelerate convergence during theoptimization process all the design variables are reduced totwo digits and then the optimization results are zoomedout to the same multiple e GA-based multiparameteroptimization scheme is used for comparison with theproposed optimization method which includes codingcrossing mutation and selecting operations [10] Roadexcitation is simulated by the harmonic function describedin formula (15)
(1) e parameters involved in the proposed optimi-zation method are set up as below
(i) Number of AF 15(ii) Max iteration 1000(iii) Step 05(iv) Visual 5(v) Try-number 3(vi) Delta 05556
(2) e selected optimization conditions for GA
(i) Number of individuals 15(ii) Max iteration 1000(iii) Crossover rate 09(iv) Mutation rate 05(v) Selecting rate 08
For the established motion equation of nonlinear IWM-suspensions coupling system the nonlinear coefficients c
and ε are both assigned to be 05 e dynamics parameteroptimization results are shown in Table 1 where the originaldynamics parameters of nonlinear IWM-suspensions cou-pling system are listed [28]
e larger the fish swarm the greater the ability to jumpout from the local extreme value and the faster the con-vergence rate but the amount of each iteration calculationis also greater Numerical experiments show that when thenumber of AF is 15 the amount of calculation and theconvergence rate reach a good balance e changes of foodconcentration calculated by the proposed method areshown in Figure 6 It can be seen that the food concen-tration increases from 5693 times10minus3 to 6491 times 10minus3 step bystep within 1000 iterations From the whole optimizationprocedure the food concentration breaks though localextreme values for four times and eventually reaches aglobal extreme value is phenomenon interprets theglobal convergence characteristic of the proposed opti-mization method e iteration process of each parameteris shown in Figures 7(a)ndash7(h) from which it is easy to seethat c3 achieves convergence faster than other parametersc3 and c4 finally converge to the boundaries of their defi-nition domains
4 Simulation Analyses of OptimizationControl Effects
In this Section numerical simulations are executed tocompare and verify the optimization control effects of theproposed method and GA Rough and bump road excita-tions simulated by harmonic functions [2] are used to
for 1 to try-numberrandomly select a new position (formula (7))if beyond the definition domainselect boundary value
if the food concentration of the new position is highermove a step to the next position (formula (8))break
endif foraging behavior failsrandomly select a position
end
PSEUDOCODE 1
Shock and Vibration 5
evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

wherem1 denotes the total mass of the tire and rimm2 is thetotal mass of the knighthead and brake clamp m3 is the massof the quarter bodywork m4 and m5 respectively denote themass of IWMrsquos stator and rotor y0 is harmonic road exci-tation y1 y2 y3 y4 and y5 respectively represent thevertical displacements of m1 m2 m3 m4 and m5 k1 and c1respectively denote the vertical sti ness and damping co-eshycients of the tire k2 and c2 respectively denote the verticalsti ness and damping coeshycients of hub bearing k3 and c3respectively denote the equivalent vertical sti ness anddamping coeshycients of suspension 1 (see Figure 1) k4 and c4respectively denote the sti ness and damping coeshycients ofsuspension 2 between motor stator and bodywork k5 and c5respectively represent the sti ness and damping coeshycients ofthe bearing between motor stator and rotor k6 and c6 re-spectively are the sti ness and damping coeshycients of sus-pension 3 between motor stator and knighthead k7 and c7respectively denote the vertical sti ness and damping co-eshycients of the bushing between the motor rotor and the rim
22 Model and Method of Optimization e AFSA has agood ability to overcome local extreme value and obtain
global optimal solution in search space [19] Here in ac-cordance with the experimental results by Mitra et al [9]eight key dynamics parameters of IWM-suspensions cou-pling system are chosen as design variablesey arem1 m3k3 k4 k6 c3 c4 and c6 respectively
221 Mathematical Model of Optimization Ride comfort isan important consideration in the design of vehicular sus-pension system particularly the performance evaluationindices of vehicular suspension system [25 26] Traditionalevaluation indices such as the vertical vibration accelerationof bodywork the vertical deformation of tire and suspen-sion travel can inuence the ride comfort of a vehicleHowever the uctuation of IWMrsquos MMG is neglected whichcan deteriorate the ride comfort So here the uctuation ofIWMrsquos MMG is added to the indices
Weighted-sum method is used to indicate the impor-tance of each index and connect subtargets into a compositeoptimization objective Root-mean-square (RMS) value isused to reduce the impact of contingency factors emathematical model of optimization problem is written as
F(f) min1
intt2t1
λ1f21RMS f2
1( )( ) + λ2f22RMS f2
2( )( ) + λ3f23RMS f2
3( )( ) + λ4f24RMS f2
4( )( )[ ]dt
(4)
Body
Suspension 1
Suspension 2
Brake clamp
Tire
Rim
Motor bearing
Suspension 3
Bushing
Hub bearing
Knighthead
SpindleStator
Motor magnet gapRotor
Figure 1 e structure of IWM-suspensions coupling system
y3
y2
y1
y0
m3 m5
m4
m2
m1
k4
k6
k7 c7
c6
k5
c3
c2
c1
c4 y4
y5
c5
k3
k2
k1
Figure 2 e quarter-car nonlinear vibration model
Shock and Vibration 3
subject tog1 l1 minus y2 minusy3
∣∣∣∣∣∣∣∣ge 0
g2 l2 minus y4 minusy5∣∣∣∣
∣∣∣∣ge 045(kg)lem1 le 60(kg)310(kg)lem3 le 350(kg)10(kNm)le k3 le 80(kNm)10(kNm)le k4 le 30(kNm)10(kNm)le k6 le 30(kNm)200(Nsm)le c3 le 2000(Nsm)100(Nsm)le c4 le 800(Nsm)10000(Nsm)le c6 le 35000(Nsm)
(5)
where f1 euroy3 f2 (y1 minusy0) f3 (y3 minusy2) andf4 (y5 minusy4) which respectively denote the vertical vi-bration acceleration of bodywork the vertical deformationof tire the suspension travel and the vertical uctuation ofIWMrsquosMMG F(f) is an objective function t1 0 s t210 sthis time period includes the transient and steady-stateresponse of dynamics system λ1 λ2 λ3 and λ4 are re-spectively the weighted value of each performance indexwhich are assigned to be 025 02 02 and 035 g1 and g2 areconstraints l1 9 cm and l2 05mm respectively denotethe suspension limit travel and the limit value of MMG
222 AFSA-Based Optimization Method and Proceduree number of articial shes (AFs) in sh swarm is denedas N and each AF that includes the 8 dynamics parameters(ie m1 m3 k3 k4 k6 c3 c4 and c6) is denoted by AFi(i 12 N) So AFi can be written as AFi [x1i x2i x8i]Twhere each element in the vector represents a dynamicsparameter In this way the sh swarm can be expressed byan 8timesNmatrix which is shown in Figure 3 Each column ofthe matrix represents an articial sh and its position
By substituting AFi into formula (4) the correspondingYi F(f ) can be obtained which is regarded as food con-centration in the current position (also means the tness inGA) As shown in Figure 4 Step is the AFrsquos movement sizeVisual is AFrsquos eld of view Try-number is dened as themaximum number of attempts of foraging behavior Toavoid overcrowding with the surrounding partners acongestion factor delta is set up which is expressed asfollows
delta 1
α middot nlimit (6)
where α represents the degree of approximation of extremesand it is a coeshycient between 0 and 1 nlimit is the maximumupper limit of the AFrsquos number existing in the eld of viewHere we choose α 09 and nlimit 2
e initial data of each AF in articial sh swarmmust be dened in advance which can be randomlygenerated within their denition domains [10 27]Without losing of generality the i-th AF is denoted asAFi [m1i m3i k3i k4i k6i c3i c4i c6i]
T After initializing
an articial sh swarm the AFs in the sh swarm searchthe optimal solution by iterations During each iterationthe AFs update themselves by the following steps
(1) Random Moving Behavior and Foraging BehaviorRandom moving behavior is a kind of default foragingbehavior during which AFi randomly selects a state AFjwithin its visual (formula (7)) and then moves one step to anew position AFnext (formula (8)) In the foraging behaviorthe AF always tries to move to a better place based on thefood concentration which lays the foundation ofconvergence
AFj m1i m3i k3i k4i k6i c3i c4i c6i[ ]T + visual times amn( )8times1(7)
where amn is an uniformly distributed random number overthe interval [minus1 1] and amn ne 0
AFnext m1i m3i k3i k4i k6i c3i c4i c6i[ ]T
+ β times step timesAFj minusAFiAFj minusAFi
(8)
where β min(|αmn|) (Pseudocode 1)
(2) Swarm Behavior is behavior enables AFi to move asmuch as possible to the center of nearby partners AFcenter
A dynamic parameterthat needs to be
optimized
An artificial fish
e number of artificial fish is N
e n
umbe
r of d
ynam
ic p
aram
eter
s is 8
x11 x12 x13 x1N
x22 x23 x2N
x32 x33
x3N
x82 x83 x8N
x21
x31
x81
Figure 3 e expression of articial sh swarm
Visual
Step
Figure 4 AFrsquos visual and moving step
4 Shock and Vibration
and avoid egregious overcrowding e center of nearbypartners is given by
AFcenter 1113936
nfj+1AFj
nf (9)
where nf is the number of nearby partners that is calculatedby using the formula AFj minusAFile visual e criteria forjudging congestion are given by formula (10) which decideswhether to follow formula (11)
Ycenter
Yi middot nfgt delta (10)
where Ycenter represents the food concentration of AFcenter
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFcenter minusAFi
AFcenter minusAFi
(11)
where rand() is an random number over the interval (0 1)(Pseudocode 2)
(3) Following Behavior AFi searches for partners within itsvisual and selectively moves to the one with the highest foodconcentration If formula (12) is satisfied AFi movesaccording to formula (13)
Ymax
Yi middot nfgt delta (12)
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFmax minusAFi
AFmax minusAFi
(13)
where AFmax is the AF with the highest food concentrationYmax (Pseudocode 3)
e dynamics parameter optimization procedure ofnonlinear IWM-suspensions coupling system is shown inFigure 5
3 Optimization Results
e overall dynamics parameter optimization procedureis executed by Matlab software In order to easily choose
Step and Visual and accelerate convergence during theoptimization process all the design variables are reduced totwo digits and then the optimization results are zoomedout to the same multiple e GA-based multiparameteroptimization scheme is used for comparison with theproposed optimization method which includes codingcrossing mutation and selecting operations [10] Roadexcitation is simulated by the harmonic function describedin formula (15)
(1) e parameters involved in the proposed optimi-zation method are set up as below
(i) Number of AF 15(ii) Max iteration 1000(iii) Step 05(iv) Visual 5(v) Try-number 3(vi) Delta 05556
(2) e selected optimization conditions for GA
(i) Number of individuals 15(ii) Max iteration 1000(iii) Crossover rate 09(iv) Mutation rate 05(v) Selecting rate 08
For the established motion equation of nonlinear IWM-suspensions coupling system the nonlinear coefficients c
and ε are both assigned to be 05 e dynamics parameteroptimization results are shown in Table 1 where the originaldynamics parameters of nonlinear IWM-suspensions cou-pling system are listed [28]
e larger the fish swarm the greater the ability to jumpout from the local extreme value and the faster the con-vergence rate but the amount of each iteration calculationis also greater Numerical experiments show that when thenumber of AF is 15 the amount of calculation and theconvergence rate reach a good balance e changes of foodconcentration calculated by the proposed method areshown in Figure 6 It can be seen that the food concen-tration increases from 5693 times10minus3 to 6491 times 10minus3 step bystep within 1000 iterations From the whole optimizationprocedure the food concentration breaks though localextreme values for four times and eventually reaches aglobal extreme value is phenomenon interprets theglobal convergence characteristic of the proposed opti-mization method e iteration process of each parameteris shown in Figures 7(a)ndash7(h) from which it is easy to seethat c3 achieves convergence faster than other parametersc3 and c4 finally converge to the boundaries of their defi-nition domains
4 Simulation Analyses of OptimizationControl Effects
In this Section numerical simulations are executed tocompare and verify the optimization control effects of theproposed method and GA Rough and bump road excita-tions simulated by harmonic functions [2] are used to
for 1 to try-numberrandomly select a new position (formula (7))if beyond the definition domainselect boundary value
if the food concentration of the new position is highermove a step to the next position (formula (8))break
endif foraging behavior failsrandomly select a position
end
PSEUDOCODE 1
Shock and Vibration 5
evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

subject tog1 l1 minus y2 minusy3
∣∣∣∣∣∣∣∣ge 0
g2 l2 minus y4 minusy5∣∣∣∣
∣∣∣∣ge 045(kg)lem1 le 60(kg)310(kg)lem3 le 350(kg)10(kNm)le k3 le 80(kNm)10(kNm)le k4 le 30(kNm)10(kNm)le k6 le 30(kNm)200(Nsm)le c3 le 2000(Nsm)100(Nsm)le c4 le 800(Nsm)10000(Nsm)le c6 le 35000(Nsm)
(5)
where f1 euroy3 f2 (y1 minusy0) f3 (y3 minusy2) andf4 (y5 minusy4) which respectively denote the vertical vi-bration acceleration of bodywork the vertical deformationof tire the suspension travel and the vertical uctuation ofIWMrsquosMMG F(f) is an objective function t1 0 s t210 sthis time period includes the transient and steady-stateresponse of dynamics system λ1 λ2 λ3 and λ4 are re-spectively the weighted value of each performance indexwhich are assigned to be 025 02 02 and 035 g1 and g2 areconstraints l1 9 cm and l2 05mm respectively denotethe suspension limit travel and the limit value of MMG
222 AFSA-Based Optimization Method and Proceduree number of articial shes (AFs) in sh swarm is denedas N and each AF that includes the 8 dynamics parameters(ie m1 m3 k3 k4 k6 c3 c4 and c6) is denoted by AFi(i 12 N) So AFi can be written as AFi [x1i x2i x8i]Twhere each element in the vector represents a dynamicsparameter In this way the sh swarm can be expressed byan 8timesNmatrix which is shown in Figure 3 Each column ofthe matrix represents an articial sh and its position
By substituting AFi into formula (4) the correspondingYi F(f ) can be obtained which is regarded as food con-centration in the current position (also means the tness inGA) As shown in Figure 4 Step is the AFrsquos movement sizeVisual is AFrsquos eld of view Try-number is dened as themaximum number of attempts of foraging behavior Toavoid overcrowding with the surrounding partners acongestion factor delta is set up which is expressed asfollows
delta 1
α middot nlimit (6)
where α represents the degree of approximation of extremesand it is a coeshycient between 0 and 1 nlimit is the maximumupper limit of the AFrsquos number existing in the eld of viewHere we choose α 09 and nlimit 2
e initial data of each AF in articial sh swarmmust be dened in advance which can be randomlygenerated within their denition domains [10 27]Without losing of generality the i-th AF is denoted asAFi [m1i m3i k3i k4i k6i c3i c4i c6i]
T After initializing
an articial sh swarm the AFs in the sh swarm searchthe optimal solution by iterations During each iterationthe AFs update themselves by the following steps
(1) Random Moving Behavior and Foraging BehaviorRandom moving behavior is a kind of default foragingbehavior during which AFi randomly selects a state AFjwithin its visual (formula (7)) and then moves one step to anew position AFnext (formula (8)) In the foraging behaviorthe AF always tries to move to a better place based on thefood concentration which lays the foundation ofconvergence
AFj m1i m3i k3i k4i k6i c3i c4i c6i[ ]T + visual times amn( )8times1(7)
where amn is an uniformly distributed random number overthe interval [minus1 1] and amn ne 0
AFnext m1i m3i k3i k4i k6i c3i c4i c6i[ ]T
+ β times step timesAFj minusAFiAFj minusAFi
(8)
where β min(|αmn|) (Pseudocode 1)
(2) Swarm Behavior is behavior enables AFi to move asmuch as possible to the center of nearby partners AFcenter
A dynamic parameterthat needs to be
optimized
An artificial fish
e number of artificial fish is N
e n
umbe
r of d
ynam
ic p
aram
eter
s is 8
x11 x12 x13 x1N
x22 x23 x2N
x32 x33
x3N
x82 x83 x8N
x21
x31
x81
Figure 3 e expression of articial sh swarm
Visual
Step
Figure 4 AFrsquos visual and moving step
4 Shock and Vibration
and avoid egregious overcrowding e center of nearbypartners is given by
AFcenter 1113936
nfj+1AFj
nf (9)
where nf is the number of nearby partners that is calculatedby using the formula AFj minusAFile visual e criteria forjudging congestion are given by formula (10) which decideswhether to follow formula (11)
Ycenter
Yi middot nfgt delta (10)
where Ycenter represents the food concentration of AFcenter
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFcenter minusAFi
AFcenter minusAFi
(11)
where rand() is an random number over the interval (0 1)(Pseudocode 2)
(3) Following Behavior AFi searches for partners within itsvisual and selectively moves to the one with the highest foodconcentration If formula (12) is satisfied AFi movesaccording to formula (13)
Ymax
Yi middot nfgt delta (12)
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFmax minusAFi
AFmax minusAFi
(13)
where AFmax is the AF with the highest food concentrationYmax (Pseudocode 3)
e dynamics parameter optimization procedure ofnonlinear IWM-suspensions coupling system is shown inFigure 5
3 Optimization Results
e overall dynamics parameter optimization procedureis executed by Matlab software In order to easily choose
Step and Visual and accelerate convergence during theoptimization process all the design variables are reduced totwo digits and then the optimization results are zoomedout to the same multiple e GA-based multiparameteroptimization scheme is used for comparison with theproposed optimization method which includes codingcrossing mutation and selecting operations [10] Roadexcitation is simulated by the harmonic function describedin formula (15)
(1) e parameters involved in the proposed optimi-zation method are set up as below
(i) Number of AF 15(ii) Max iteration 1000(iii) Step 05(iv) Visual 5(v) Try-number 3(vi) Delta 05556
(2) e selected optimization conditions for GA
(i) Number of individuals 15(ii) Max iteration 1000(iii) Crossover rate 09(iv) Mutation rate 05(v) Selecting rate 08
For the established motion equation of nonlinear IWM-suspensions coupling system the nonlinear coefficients c
and ε are both assigned to be 05 e dynamics parameteroptimization results are shown in Table 1 where the originaldynamics parameters of nonlinear IWM-suspensions cou-pling system are listed [28]
e larger the fish swarm the greater the ability to jumpout from the local extreme value and the faster the con-vergence rate but the amount of each iteration calculationis also greater Numerical experiments show that when thenumber of AF is 15 the amount of calculation and theconvergence rate reach a good balance e changes of foodconcentration calculated by the proposed method areshown in Figure 6 It can be seen that the food concen-tration increases from 5693 times10minus3 to 6491 times 10minus3 step bystep within 1000 iterations From the whole optimizationprocedure the food concentration breaks though localextreme values for four times and eventually reaches aglobal extreme value is phenomenon interprets theglobal convergence characteristic of the proposed opti-mization method e iteration process of each parameteris shown in Figures 7(a)ndash7(h) from which it is easy to seethat c3 achieves convergence faster than other parametersc3 and c4 finally converge to the boundaries of their defi-nition domains
4 Simulation Analyses of OptimizationControl Effects
In this Section numerical simulations are executed tocompare and verify the optimization control effects of theproposed method and GA Rough and bump road excita-tions simulated by harmonic functions [2] are used to
for 1 to try-numberrandomly select a new position (formula (7))if beyond the definition domainselect boundary value
if the food concentration of the new position is highermove a step to the next position (formula (8))break
endif foraging behavior failsrandomly select a position
end
PSEUDOCODE 1
Shock and Vibration 5
evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

and avoid egregious overcrowding e center of nearbypartners is given by
AFcenter 1113936
nfj+1AFj
nf (9)
where nf is the number of nearby partners that is calculatedby using the formula AFj minusAFile visual e criteria forjudging congestion are given by formula (10) which decideswhether to follow formula (11)
Ycenter
Yi middot nfgt delta (10)
where Ycenter represents the food concentration of AFcenter
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFcenter minusAFi
AFcenter minusAFi
(11)
where rand() is an random number over the interval (0 1)(Pseudocode 2)
(3) Following Behavior AFi searches for partners within itsvisual and selectively moves to the one with the highest foodconcentration If formula (12) is satisfied AFi movesaccording to formula (13)
Ymax
Yi middot nfgt delta (12)
AFnext m1i m3i k3i k4i k6i c3i c4i c6i1113858 1113859T
+ rand()
times step timesAFmax minusAFi
AFmax minusAFi
(13)
where AFmax is the AF with the highest food concentrationYmax (Pseudocode 3)
e dynamics parameter optimization procedure ofnonlinear IWM-suspensions coupling system is shown inFigure 5
3 Optimization Results
e overall dynamics parameter optimization procedureis executed by Matlab software In order to easily choose
Step and Visual and accelerate convergence during theoptimization process all the design variables are reduced totwo digits and then the optimization results are zoomedout to the same multiple e GA-based multiparameteroptimization scheme is used for comparison with theproposed optimization method which includes codingcrossing mutation and selecting operations [10] Roadexcitation is simulated by the harmonic function describedin formula (15)
(1) e parameters involved in the proposed optimi-zation method are set up as below
(i) Number of AF 15(ii) Max iteration 1000(iii) Step 05(iv) Visual 5(v) Try-number 3(vi) Delta 05556
(2) e selected optimization conditions for GA
(i) Number of individuals 15(ii) Max iteration 1000(iii) Crossover rate 09(iv) Mutation rate 05(v) Selecting rate 08
For the established motion equation of nonlinear IWM-suspensions coupling system the nonlinear coefficients c
and ε are both assigned to be 05 e dynamics parameteroptimization results are shown in Table 1 where the originaldynamics parameters of nonlinear IWM-suspensions cou-pling system are listed [28]
e larger the fish swarm the greater the ability to jumpout from the local extreme value and the faster the con-vergence rate but the amount of each iteration calculationis also greater Numerical experiments show that when thenumber of AF is 15 the amount of calculation and theconvergence rate reach a good balance e changes of foodconcentration calculated by the proposed method areshown in Figure 6 It can be seen that the food concen-tration increases from 5693 times10minus3 to 6491 times 10minus3 step bystep within 1000 iterations From the whole optimizationprocedure the food concentration breaks though localextreme values for four times and eventually reaches aglobal extreme value is phenomenon interprets theglobal convergence characteristic of the proposed opti-mization method e iteration process of each parameteris shown in Figures 7(a)ndash7(h) from which it is easy to seethat c3 achieves convergence faster than other parametersc3 and c4 finally converge to the boundaries of their defi-nition domains
4 Simulation Analyses of OptimizationControl Effects
In this Section numerical simulations are executed tocompare and verify the optimization control effects of theproposed method and GA Rough and bump road excita-tions simulated by harmonic functions [2] are used to
for 1 to try-numberrandomly select a new position (formula (7))if beyond the definition domainselect boundary value
if the food concentration of the new position is highermove a step to the next position (formula (8))break
endif foraging behavior failsrandomly select a position
end
PSEUDOCODE 1
Shock and Vibration 5
evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

evaluate dynamic performances of the nonlinear IWM-suspensions coupling system by analyzing the vertical vi-bration acceleration of bodywork bodywork travel tiredynamic load suspension travel (y3minusy2) and the MMG ofIWM e parameters involved in simulations are listed inTable 1
41 Response Analyses under Rough Road Excitation efunction of rough road profile in time domain can beexpressed as follows
y0(t) a
2cos
2πV0
lt1113874 1113875minus 11113876 1113877 tge 0 (14)
where a 01m and l 15m ey respectively denotedepth and length of the rough road profile e vehiclevelocity is V0 60 kmh
From the data shown in Tables 2 and 3 it can be seen thatalthough the both optimization methods can improve dy-namic performances of the nonlinear coupling systemcompared with the GA the optimization control effect of theproposed method is more obvious Under rough road ex-citation the nonlinear coupling system with the dynamicsparameters optimized by the proposed method has betterdynamic indicators especially the maximum IWMrsquos MMGand the maximum suspension travel which are respectivelydecreased by 50 and 75 Response comparisons of the
nonlinear coupling system optimized by different methodsare shown in Figures 8(a)ndash8(e)
Under rough road excitation and using different op-timization methods the bodywork vertical vibration ac-celeration the bodywork travel the suspension travel thetire dynamic load and the IWMrsquos vertical MMG ofnonlinear IWM-suspensions coupling systems aredepicted in Figures 8(a)ndash8(e) It can be seen that thedynamic responses of the optimized nonlinear IWM-suspensions coupling system are improved and theiramplitudes are reduced e vibrations experienced bypassengers in the vehicle are reduced with the decreases ofbodywork vertical vibration acceleration and bodyworktravel and the ride comfort is meanwhile enhanced edecreased vertical fluctuation of the MMG indicates thatthe relative displacement between the stator and the rotorchanges smoothly which reduces unbalanced electro-magnetic force waves decreases motor wear and extendsmotor bearing life Lower tire dynamic load can extendtire life and reduce the frequency of tire replacementFrom Tables 2 and 3 and Figures 8(a)ndash8(e) it can also beclearly seen that although dynamic characteristics of theGA-optimized coupling system have been improved theminimum value of all the response indicators is alwaysobtained by the proposed method which indicates that theproposed AFSA-based method has better optimizationcontrol effects
search for partners within the visualif found partnersobtain the center position (formula (9)) and the corresponding food concentrationif the position has higher food concentration (YcentergtYi) and not very crowded (formula (10))move to the position (formula (11))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 2
search for partners within the visualif found partnersobtain the position of the AF who owns the maximum food concentrationif its food concentration is higher (YmaxgtYi) and not very crowded (formula (12))move to the position (formula (13))
elseforaging behavior
endelseforaging behavior
end
PSEUDOCODE 3
6 Shock and Vibration
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
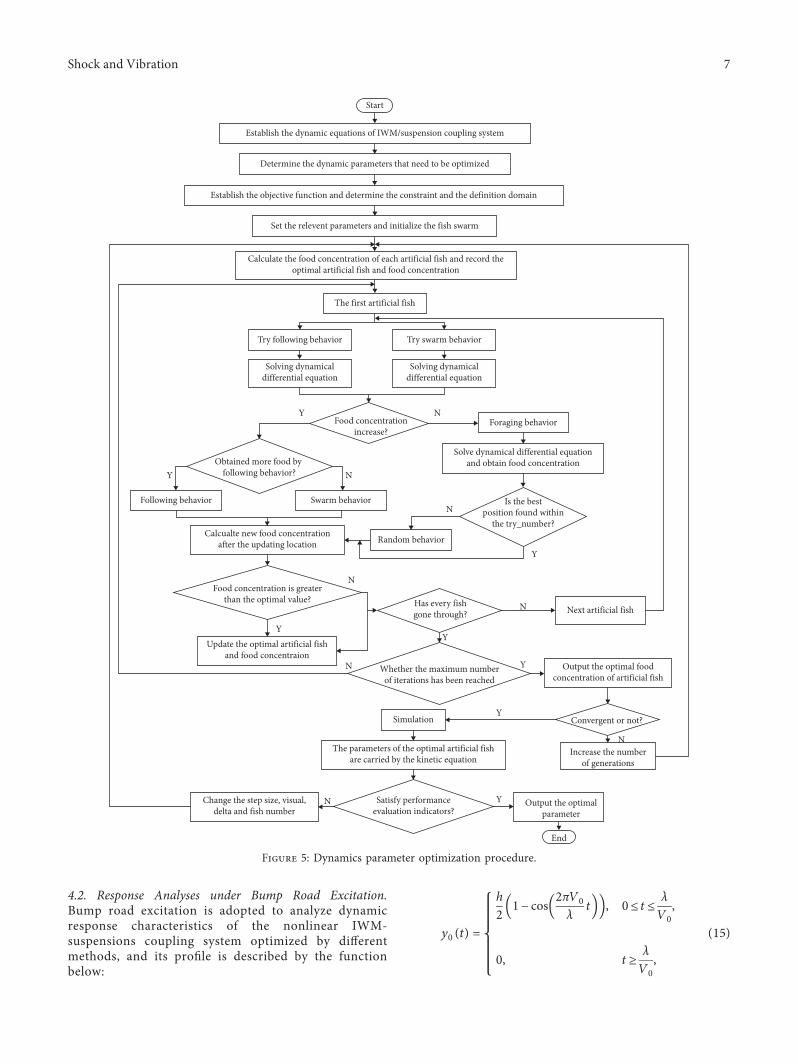
42 Response Analyses under Bump Road ExcitationBump road excitation is adopted to analyze dynamicresponse characteristics of the nonlinear IWM-suspensions coupling system optimized by di erentmethods and its prole is described by the functionbelow
y0(t)
h
21minus cos
2πV0
λt( )( ) 0le tle
λV0
0 tgeλV0
(15)
Start
Establish the dynamic equations of IWMsuspension coupling system
Establish the objective function and determine the constraint and the definition domain
Determine the dynamic parameters that need to be optimized
Set the relevent parameters and initialize the fish swarm
Calculate the food concentration of each artificial fish and record theoptimal artificial fish and food concentration
The first artificial fish
Try following behavior Try swarm behavior
Solving dynamicaldifferential equation
Solving dynamicaldifferential equation
Food concentrationincrease
Foraging behavior
Solve dynamical differential equationand obtain food concentration
Is the bestposition found within
the try_number
Obtained more food by following behavior
Following behavior Swarm behavior
Calcualte new food concentrationafter the updating location
Food concentration is greaterthan the optimal value Has every fish
gone through
Update the optimal artificial fishand food concentraion
Whether the maximum numberof iterations has been reached
Output the optimal foodconcentration of artificial fish
Convergent or not
Increase the numberof generations
Output the optimalparameter
Satisfy performanceevaluation indicators
Simulation
The parameters of the optimal artificial fishare carried by the kinetic equation
Change the step size visualdelta and fish number
End
Next artificial fish
Random behavior
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
Y
Y
N
Figure 5 Dynamics parameter optimization procedure
Shock and Vibration 7
Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Table 1 e dynamics parameter optimization results
Parameters Original values Optimal values (by the proposed method) Optimal values (by GA) Unitsm1 60 587964 560428 kgm2 5 mdash mdash kgm3 327 3283650 3472638 kgm4 18 mdash mdash kgm5 12 mdash mdash kgk1 250000 mdash mdash Nmk2 5120000 mdash mdash Nmk3 25000 782465801 259832784 Nmk4 15000 271375320 260642881 Nmk5 5000000 mdash mdash Nmk6 10000 142159274 260166510 Nmk7 150000 mdash mdash Nmc1 375 mdash mdash Nmiddotsmc2 10 mdash mdash Nmiddotsmc3 800 20000000 19118151 Nmiddotsmc4 100 8000000 6232551 Nmiddotsmc5 10 mdash mdash Nmiddotsmc6 15000 128250224 171976337 Nmiddotsmc7 450 mdash mdash Nmiddotsm
times10ndash3
56
57
58
59
6
61
62
63
64
65
Food
conc
entr
atio
n Y
100 200 300 400 500 600 700 800 900 10000Generations
Figure 6 e iteration process of food concentration
m1 (
kg)
50
45
55
60
100 200 300 400 500 600 700 800 900 10000Generations
(a)
m3 (
kg)
310
315
320
325
330
335
340
345
350
100 200 300 400 500 600 700 800 900 10000Generations
(b)
Figure 7 Continued
8 Shock and Vibration
where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

where h and λ respectively denote height and length of thebump road prole Here we choose h 01m λ 5m andthe vehicle velocity V0 25 kmh
Tables 4 and 5 respectively give the computation results ofresponse indicators of the nonlinear coupling system opti-mized by di erent methods and the descending percentages ofsome important indicators from which it can be clearly con-rmed that the nonlinear coupling system optimized bythe proposed method achieves the maximum descending
percentages of response indicators compared with the GA-optimized one e maximum values of bodywork accelera-tion bodywork travel tire dynamic load suspension travel andIWMrsquosMMGare individually reduced by 28 18 39 74and 53 which indicates that the nonlinear coupling systemoptimized by the proposed method has better dynamic per-formance under bump road excitation e response com-parisons of the nonlinear IWM-suspensions coupling systemoptimized by di erentmethods are shown in Figures 9(a)ndash9(e)
times104
k 3 (N
m)
2
3
4
5
6
7
8
100 200 300 400 500 600 700 800 900 10000Generations
(c)
c 3 (N
middotsm
)
1850
1900
1950
2000
100 200 300 400 500 600 700 800 900 10000Generations
(d)
times104
k 4 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(e)
c 4 (N
middotsm
)
500
550
600
650
700
750
800
100 200 300 400 500 600 700 800 900 10000Generations
(f )
times104
k 6 (N
m)
112141618
222242628
3
100 200 300 400 500 600 700 800 900 10000Generations
(g)
times104
c 6 (N
middotsm
)
100 200 300 400 500 600 700 800 900 10000Generations
1
15
2
25
3
35
(h)
Figure 7 e iteration process of each dynamics parameter (a) Optimization iteration of m1 (b) Optimization iteration of m3(c) Optimization iteration of k3 (d) Optimization iteration of c3 (e) Optimization iteration of k4 (f ) Optimization iteration of c4(g) Optimization iteration of k6 (h) Optimization iteration of c6
Shock and Vibration 9
Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Table 2 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
e maximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
emaximumvalue of the
tiredynamicload (N)
emaximumvalue of the
IWMrsquosMMG (mm)
RMS ofIWMrsquosMMG(mm)
RMS of thebodyworkacceleration
(ms2)
Using original parameters 639 0153 0055 2426 012 0066 3581Using parametersoptimized by the GA 454 0134 0029 1834 010 0061 2782
Using parameters optimized bythe proposed method 444 0121 0014 1799 006 0032 2332
Table 3 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of
themaximumbodywork
acceleration ()
e descendingpercentageof the
maximumbodyworktravel ()
e descendingpercentage ofthe maximumsuspensiontravel ()
e descendingpercentageof the
maximum tiredynamic load ()
e descendingpercentage ofthe maximum
IWMrsquosMMG ()
Using parametersoptimized by the GA 29 12 47 24 17
Using parameters optimized by theproposed method 31 21 75 26 50
OriginalGAAFSA
ndash8
ndash6
ndash4
ndash2
0
2
4
6
d2 y 3d
2 t (m
s2 )
1 2 3 4 5 6 7 8 9 100Time t (s)
(a)
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
y 3 (m
)
2 4 6 8 100Time t (s)
(b)
OriginalGAAFSA
0
ndash006
ndash004
ndash002
002
004
006
(y3 ndash
y 2) (
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(c)
OriginalGAAFSA
ndash3000
ndash2000
ndash1000
0
1000
2000
3000
k 1(y
0 ndash y 1
) (N
)
1 2 3 4 5 6 7 8 9 100Time t (s)
(d)
Figure 8 Continued
10 Shock and Vibration
It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

It can be seen from Figures 9(a)ndash9(e) that the originalnonlinear IWM-suspensions coupling system cannot at-tenuate vibration rapidly while the GA-optimized and theproposed method-optimized coupling systems have vi-bration damping performance under bumpy road exci-tation Compared with the GA-optimized nonlinearcoupling system the proposed method-optimized one canweaken vibration amplitudes quickly and has shorter timeto reach steady state e proposed AFSA-based opti-mization method can well suppress the vibration of
nonlinear IWM-suspensions coupling system on bumpyroad simultaneously limit the suspension travel within itsallowable range and more e ectively reduce the body-work vertical vibration acceleration and amplitudeerefore the nonlinear IWM-suspensions couplingsystem optimized by the proposed method has bettersynthesized dynamic performance which indicates theproposed AFSA-based optimization method can wellimprove the ride comfort of electric wheel vehicle onbumpy road
OriginalGAAFSA
ndash02
ndash015
ndash01
ndash005
0
005
01
015
(y4
ndash y 5
) (m
m)
1 2 3 4 5 6 7 8 9 100Time t (s)
(e)
Figure 8 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
Table 4 e comparisons of response indicators calculated by using di erent dynamic parameters
Indexes
emaximumvalue of thebodyworkacceleration
(ms2)
emaximumvalue of thebodyworktravel (m)
e maximumvalue of thesuspensiontravel (m)
e maximum valueof the tire dynamic
load (N)
emaximumvalue of theIWMrsquos MMG
(mm)
RMS ofIWMrsquos MMG
(mm)
RMS of thebodyworkacceleration
(ms2)
Using originalparameters 455 0140 0039 1742 0088 0032 1818
Using parametersoptimizedby the GA
353 0126 0024 1435 0078 0028 1324
Using parametersoptimized by theproposed method
328 0115 0010 1065 0041 0015 1171
Table 5 e descending percentages of the response indicators compared with original system
Indexes
e descendingpercentage of the
maximum bodyworkacceleration ()
e descendingpercentage of the
maximum bodyworktravel ()
e descendingpercentage of the
maximum suspensiontravel ()
e descendingpercentage of the
maximumtire dynamicload ()
e descendingpercentage of the
maximumIWMrsquos MMG ()
Using parametersoptimized by the GA 22 10 38 18 11
Using parameters optimizedby the proposed method 28 18 74 39 53
Shock and Vibration 11
OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

OriginalGAAFSA
ndash5
0
5
d2 y 3d
2 t (m
s2 )
05 1 15 2 25 3 35 4 45 50Time t (s)
(a)
OriginalGAAFSA
0
ndash005
005
01
015
y 3 (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(b)
OriginalGAAFSA
ndash004
ndash003
ndash002
ndash001
0
001
002
003
004
(y3
ndash y 2
) (m
)
05 1 15 2 25 3 35 4 45 50Time t (s)
(c)
OriginalGAAFSA
ndash2000
ndash1500
ndash1000
ndash500
0
500
1000
1500
2000
k 1(y
0 ndash
y 1) (
N)
05 1 15 2 25 3 35 4 45 50Time t (s)
(d)
OriginalGAAFSA
05 1 15 2 25 3 35 4 45 50Time t (s)
ndash01
ndash005
0
005
01
(y4
ndash y 5
) (m
m)
(e)
Figure 9 e response comparisons of the coupling system optimized by di erent methods (a) e bodywork acceleration (b) ebodywork travel (c) e suspension travel (d) e tire dynamic load (e) e vertical MMG
12 Shock and Vibration
5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

5 Conclusion
Based on the established novel dynamics model of non-linear IWM-suspensions coupling system which includesthe MMG of IWM the AFSA-based multiobjective opti-mization mathematical model and method are proposed tooptimize multiple dynamics parameters of the couplingsystem Under rough and bump road excitations nu-merical results show that the dynamic performances of theproposed method-optimized coupling system are wellimproved and the optimal dynamics parameter combi-nations are obtained More importantly by using theproposed optimization method the MMGrsquos vertical fluc-tuation and the bodywork vertical vibration accelerationcan be effectively reduced which can decrease electro-magnetic force waves and motor wear extend bearing lifeand significantly improve the ride comfort of electric wheelvehicle Compared with the GA-optimized system and theoriginal system without optimization the system optimizedby the proposed AFSA-based method has the best dynamiccharacteristics which verifies the methodological optimi-zation control effect global convergence characteristic andsuperiority than the GA under the same optimizationconditions e methodology investigated by this papergives a valuable means to the optimization control of IWM-suspensions coupling system As future work it is bene-ficial to discuss the differences of different optimizationmethods eg DE PSO the proposed AFSA-based methodand so on and study the parameter selection method of theproposed optimization algorithm so that we can improvethe dynamic performance of IWM-suspensions couplingsystem further
Data Availability
e source codes are given as supplementary materialsnamed MATLABzip
Conflicts of Interest
e authors declare no potential conflicts of interest withrespect to the research authorship andor publication ofthis article
Acknowledgments
is study was funded by the National Key Research andDevelopment Program of China (grant no 2016YFD0700800)and the Shaanxi Province Key Research and DevelopmentProgram of China (grant no 2017NY-176) e authorswould like to appreciate all the authors listed in the referencesand would also like to thank the funding organizations thatprovided financial support
Supplementary Materials
e description of supplementary materials is ldquoMatlabCodes of AFSA GA and Simulationrdquo (SupplementaryMaterials)
References
[1] C Pomponi S Scalzi L Pasquale C M Verrelli andR Marino ldquoAutomatic motor speed reference generators forcruise and lateral control of electric vehicles with in-wheelmotorsrdquo Control Engineering Practice vol 79 pp 126ndash1432018
[2] X Shao F Naghdy H Du and Y Qin ldquoCoupling effectbetween road excitation and an in-wheel switched reluctancemotor on vehicle ride comfort and active suspension controlrdquoJournal of Sound and Vibration vol 443 pp 683ndash702 2019
[3] L Qin Y Yu C Zhou S Mao and F Yang ldquoSimulation ofvertical characteristics and in-wheel motor vibration ofelectric vehicles with asymmetric suspension damper underroad impactrdquo International Journal of Modelling and Simu-lation vol 39 no 1 pp 14ndash20 2019
[4] Y Mao S Zuo X Wu and X Duan ldquoHigh frequency vi-bration characteristics of electric wheel system under in-wheelmotor torque ripplerdquo Journal of Sound and Vibrationvol 400 pp 442ndash456 2017
[5] Y Duan P Li and G Ren ldquoElectric vehicles with in-wheelswitched reluctance motors coupling effects between roadexcitation and the unbalanced radial forcerdquo Journal of Soundand Vibration vol 372 pp 69ndash81 2016
[6] X Zeng G Li G Yin D Song S Li and N Yang ldquoModelpredictive control-based dynamic coordinate strategy forhydraulic hub-motor auxiliary system of a heavy commercialvehiclerdquo Mechanical Systems and Signal Processing vol 101pp 97ndash120 2018
[7] X Shao F Naghdy andH Du ldquoReliable fuzzy Hinfin control foractive suspension of in-wheel motor driven electric vehicleswith dynamic dampingrdquo Mechanical Systems and SignalProcessing vol 87 pp 365ndash383 2017
[8] H Pang X Zhang and Z Xu ldquoAdaptive backstepping-basedtracking control design for nonlinear active suspension sys-tem with parameter uncertainties and safety constraintsrdquo ISATransactions vol 88 pp 23ndash36 2019
[9] A C Mitra T Soni G R Kiranchand S Khan andN Banerjee ldquoExperimental design and optimization of vehiclesuspension systemrdquoMaterials Today Proceedings vol 2 no 4-5 pp 2453ndash2462 2015
[10] Z Cheng and Z Lu ldquoResearch on the PID control of the ESPsystem of tractor based on improved AFSA and improvedSArdquo Computers and Electronics in Agriculture vol 148pp 142ndash147 2018
[11] M P Nagarkar Y J Bhalerao G J V Patil and R N Z PatilldquoGA-based multi-objective optimization of active nonlinearquarter car suspension systemmdashPID and fuzzy logic controlrdquoInternational Journal of Mechanical and Materials Engi-neering vol 13 no 1 pp 1ndash20 2018
[12] A C Mitra G J Desai S R Patwardhan P H ShirkeW M H Waseem and N Banerjee ldquoOptimization of passivevehicle suspension system by genetic algorithmrdquo ProcediaEngineering vol 144 pp 1158ndash1166 2016
[13] M B S S Reddy P Vigneshwar M S Ram D R Sekhar andY S Harish ldquoComparative optimization study on vehiclesuspension parameters for rider comfort based on RSM andGArdquo Materials Today Proceedings vol 4 no 2 pp 1794ndash1803 2017
[14] Y Wang W Zhao G Zhou Q Gao and C Wang ldquoOpti-mization of an auxetic jounce bumper based on Gaussianprocess metamodel and series hybrid GA-SQP algorithmrdquoStructural and Multidisciplinary Optimization vol 57 no 6pp 2515ndash2525 2018
Shock and Vibration 13
[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

[15] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash368 2016
[16] X Ma P K Wong and J Zhao ldquoPractical multi-objectivecontrol for automotive semi-active suspension system withnonlinear hydraulic adjustable damperrdquo Mechanical Systemsand Signal Processing vol 117 pp 667ndash688 2019
[17] F Bianchini ldquoArtificial intelligence and synthetic biology atri-temporal contributionrdquo Biosystems vol 148 pp 32ndash392016
[18] K Chakkarapani T angavelu K Dharmalingam andP andavarayan ldquoMulti objective design optimization andanalysis of magnetic flux distribution for slotless permanentmagnet brushless DC motor using evolutionary algorithmsrdquoJournal of Magnetism and Magnetic Materials vol 476pp 524ndash537 2019
[19] I Rahman and J Mohamad-Saleh ldquoPlug-in electric vehiclecharging optimization using bio-inspired computational in-telligence methodsrdquo in Sustainable Interdependent Networksvol 145 pp 135ndash147 Springer Berlin Germany 2018
[20] J He X Jin S Y Xie L Cao Y Lin and N Wang ldquoMulti-body dynamics modeling and TMDoptimization based on theimproved AFSA for floating wind turbinesrdquo Renewable En-ergy vol 141 pp 305ndash321 2019
[21] K P Kumar B Saravanan and K S Swarup ldquoOptimizationof renewable energy sources in a microgrid using artificial fishswarm algorithmrdquo Energy Procedia vol 90 pp 107ndash113 2016
[22] Z Zhang KWang L Zhu and YWang ldquoA pareto improvedartificial fish swarm algorithm for solving a multi-objectivefuzzy disassembly line balancing problemrdquo Expert Systemswith Applications vol 86 pp 165ndash176 2017
[23] Y-Z Wang Z-W Li Y-X Kou Q-P Sun H-Y Yang andZ-Y Zhao ldquoA new approach to weapon-target assignment incooperative air combatrdquo Mathematical Problems in Engi-neering vol 2017 Article ID 2936279 17 pages 2017
[24] H Pan X Jing and W Sun ldquoRobust finite-time trackingcontrol for nonlinear suspension systems via disturbancecompensationrdquo Mechanical Systems and Signal Processingvol 88 pp 49ndash61 2017
[25] Z Gao S Chen Y Zhao and Z Liu ldquoNumerical evaluation ofcompatibility between comfort and energy recovery based onenergy flow mechanism inside electromagnetic active sus-pensionrdquo Energy vol 170 pp 521ndash536 2019
[26] W Liu Y L Song J Chen and S Shi ldquoA novel optimal fuzzyintegrated control method of active suspension systemrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 40 no 1 p 29 2018
[27] D Y Zhuang K Ma C A Tang Z Z Liang K K Wang andZ W Wang ldquoMechanical parameter inversion in tunnelengineering using support vector regression optimized bymulti-strategy artificial fish swarm algorithmrdquo Tunnelling andUnderground Space Technology vol 83 pp 425ndash436 2019
[28] Y Luo and D Tan ldquoStudy on the dynamics of the in-wheelmotor systemrdquo IEEE Transactions on Vehicular Technologyvol 61 no 8 pp 3510ndash3517 2012
14 Shock and Vibration
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom





























