Embed Size (px)
Citation preview

Lec. 0212735: Urban Systems Modeling Probability
12735: Urban Systems Modeling
instructor: Matteo Pozzi
1
Probability
Lec. 02

Lec. 0212735: Urban Systems Modeling Probability
outline
‐ what is probability;‐ discrete and continuous random variables;‐ distribution of random variables, functions of random variables;‐ first and second moments of random variables;‐ uni‐variate distribution models: normal, log‐normal, exponential;‐ multiple random variables;‐ joint, marginal, conditional distributions; ‐ multi‐variate distribution models.
2

Lec. 0212735: Urban Systems Modeling Probability
PART I
uni‐variate distribution models
3

Lec. 0212735: Urban Systems Modeling Probability
probability
4
P Probability of event A.
P Probability of event B.
P ∨ Probability of event A or event B.
P , Probability of event A and event B.
P ∨ P P P ,P ∨ 1 ⇒ P 1 P
∨
,
http://earthquake.usgs.gov/regional/nca/ucerf/
Venn diagram
P ∨P P
If P , 0Disjoint events:
0 P ∙ 1

Lec. 0212735: Urban Systems Modeling Probability
what is probability?
5
http://www.digii.eu/2011/20110703‐15‐holiday‐in‐campervan‐to‐italy‐and‐france/20110712‐leaning‐tower‐of‐pisa/sx19774‐marijn‐pushing‐down‐leaning‐tower‐of‐pisa‐italyjpg
10%
90%
https://userexperience.jux.com/#791734
P lim→
#
frequentist viewstochastic process:
estimate probability by a finite sample
P :
Bayesian probability
‘degree of belief’ in event
rational agent: set of consistent beliefs
with probability calculuswith decision making

Lec. 0212735: Urban Systems Modeling Probability
random variables
6
realityit evolves deterministically.
perceptionincomplete observations, incomplete understanding of the system dynamics.
probability is a complete representation of incomplete knowledge.
value[number]
random variable[distribution]
0 5 100
0.2
0.4
x
p(x)
0 5 10x
3.25

Lec. 0212735: Urban Systems Modeling Probability
from events (and experiments) to random variables
7
http://commons.wikimedia.org/wiki/File:Dice.png
6 possible outcomes
http://forum.skyscraperpage.com/showthread.php?t=183620 Venn diagram
Ensemble:
for event , we can define as a binary random variable:
1 w. p. P 0 w. p. P 1 P
; ;
1
4
2 3
5 6
Venn diagram
random variable
domaindistribution
complete set of mutually exclusive events
We assign numerical values (in ) to each possible outcome of an experiment.
experiment on a discrete domain

Lec. 0212735: Urban Systems Modeling Probability
discrete random variables
8
1 2 3 40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
X
P(X
)
1
18% 29% 38% 15%
≜ P 0
∀ : P , 0mutually exclusive outcomescomplete setP ∨ ⋯∨ 1
3 1 2 3 85%
normalized
1, 2, 3, 4
1 2 3 40
0.5
1
X
F(X
)
≜ P
positive
probability distribution:
cumulative probability distribution:
, , . . , discrete domain
example

Lec. 0212735: Urban Systems Modeling Probability
continuous random variables
9
[Bishop, 2006]
0
1
Probability Density Function
≜ lim→
P ∈ , ΔΔ
P ∈ , Δ ≅ Δ
P ∈ ,Cumulative Density Function
≜ P ∈ ∞,
∈ 0,1
0 P ∈ ,
normalized:
non‐negative:P ∈ ,

Lec. 0212735: Urban Systems Modeling Probability
expectation and moments
10
Expectation of function of a random variable
discrete continuous
Linearity of expectation
x
p(x)
, f(x
)
p(x)f(x)
proof
expectation of a constant is the constant itself
original variable: variable derived by deterministic function:mean of derived variable :

Lec. 0212735: Urban Systems Modeling Probability
expectation and moments
11
≜ ≜
≜ var
≜
First moment (mean value) [ i.e. expectation for ]
Second moment around the mean (aka variance)
coefficient of variation
Expectation of function of a random variable
discrete continuous
discrete continuous
standard deviation
x
p(x)
x
p(x)
≜ → from linearity of expectation
Linear transformation of a random variable
x
p(x)
, f(x
)
p(x)f(x)

Lec. 0212735: Urban Systems Modeling Probability
characterization of a random variable
12
0 5 10 150
50
xo
E [
(x -
x o)2 ]
Chebyshev’s inequality
P1≜
2 2 3 4
50% 25% 11% 6.2%
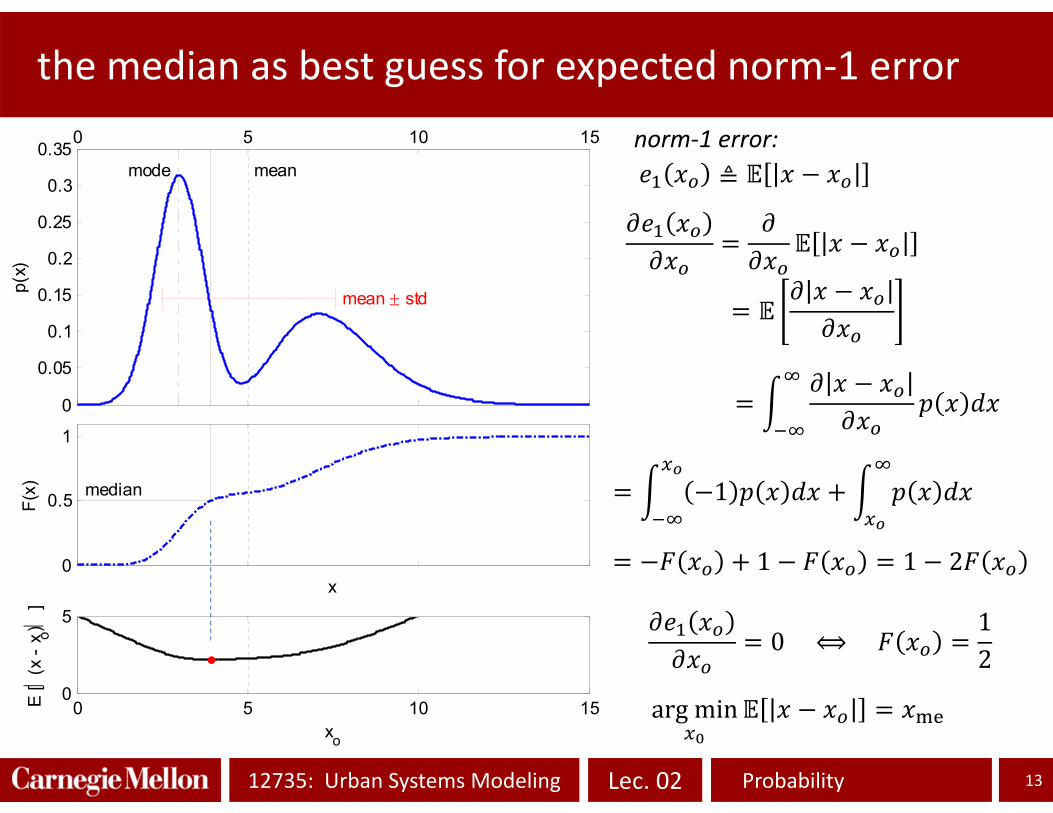
mode: ≜ argmax
median: : 50%
mean as “best guess” for expected norm‐2 error:
argmin
0 5 10 15
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
p(x)
mode mean
mean std
0
0.5
1
x
F(x) median Relation between
moments and tails:
Lec. 0212735: Urban Systems Modeling Probability
the median as best guess for expected norm‐1 error
13
0 5 10 15
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
p(x)
mode mean
mean std
0
0.5
1
x
F(x) median
0 5 10 150
5
xo
E [
(x -
x o) ]
≜
1
1 1 2
0 ⟺ 12
norm‐1 error:
argmin

Lec. 0212735: Urban Systems Modeling Probability
transformation of random variables
14
,,
′
≜
x
p x(x) ,
Fx(x
)
0
1
x
z
z = f(x)
x = f -1(z) = g(z)
px(x)
Fx(x)
)
)
random variable
transformation
: monotonically increasing
new random variable
P ∈ ∞, P ∈ ∞,
taking derivative:
inverse
note that:
equal probability:
pz(z) , Fz(z)
z
pz(z)
Fz(z)

Lec. 0212735: Urban Systems Modeling Probability
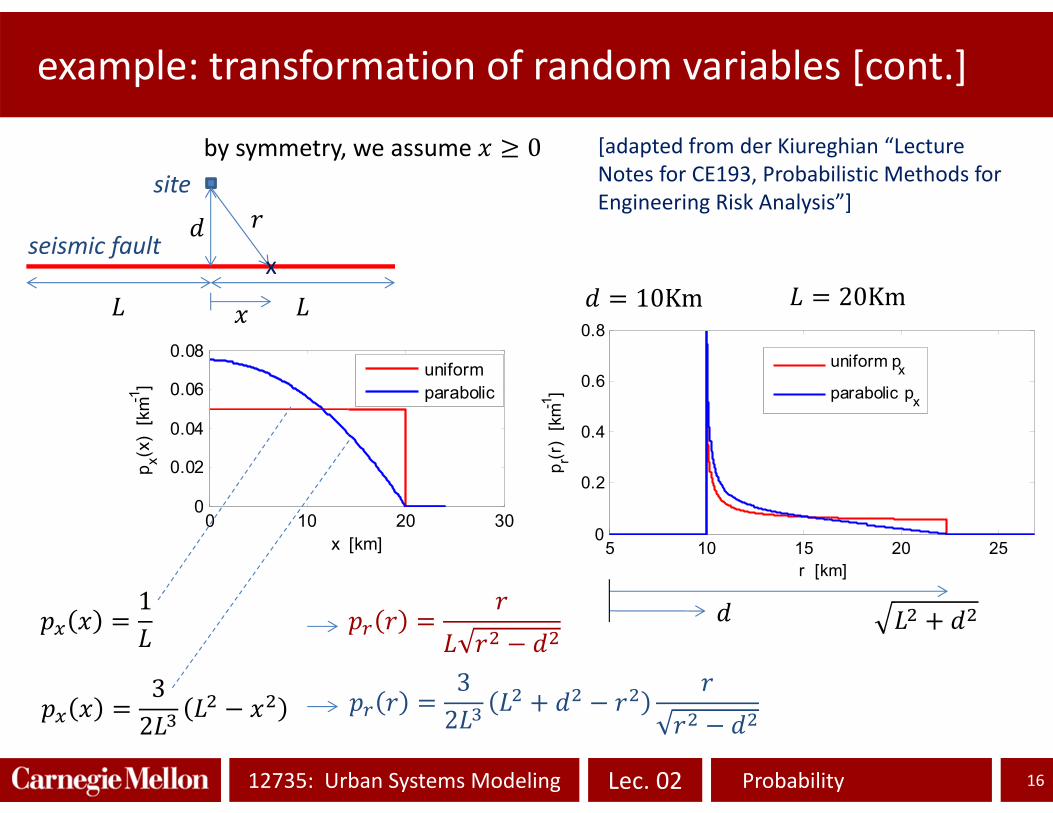
example: transformation of random variables
15
′
∈ 0,
1
32 0 otherwise
0 10 20 300
0.02
0.04
0.06
0.08
x [km]
p x(x)
[km-1
]
uniformparabolic
seismic fault
site
x
epicenter position source to site distance
by symmetry, we assume 0
32
Lec. 0212735: Urban Systems Modeling Probability
example: transformation of random variables [cont.]
16
20Km10Km
5 10 15 20 250
0.2
0.4
0.6
0.8
r [km]p r(r
) [k
m-1]
uniform px
parabolic px
[adapted from der Kiureghian “Lecture Notes for CE193, Probabilistic Methods for Engineering Risk Analysis”]
32
0 10 20 300
0.02
0.04
0.06
0.08
x [km]
p x(x)
[km-1
]
uniformparabolic
seismic fault
site
x
by symmetry, we assume 0
1
32

Lec. 0212735: Urban Systems Modeling Probability
normal distribution
17
; , ≜12
exp12 ; , 0
; , 1; , ⇒ ; varx
p(x)
2
‐ Symmetrical distribution (around the mean);‐ : position‐ : uncertainty
‐ mean = mode = median [= ]
Pdf:
http://en.wikipedia.org/wiki/Normal_distribution

Lec. 0212735: Urban Systems Modeling Probability
normal distribution [cont.]
18
log ; ,12
0
0.5
1
x
F(x)
2
x
p(x)
2
log
[p(x
)] Φ ; , ≜ ; ,
; , ≜12
exp12 ; , 0
; , 1; , ⇒ ; var
Pdf:
Cdf:
Φ ; ,12
Φ ; ,12
12 Φ ; ,
anti‐symmetry
parabola in log‐scale

Lec. 0212735: Urban Systems Modeling Probability
standard normal distribution
19
′
Φ12
exp 2
-3 -2 -1 0 1 2 30
0.5
1
z
(z
)
; , ≜12
exp12Pdf:
transformation:
12
exp 2 ; 0,1
Φ ≜ Φ ; 0,1
standard normal pdf:
standard normal cdf:
Φ ; , Φtrasformation for cdf:
≜12
exp 2
-3 -2 -1 0 1 2 3
0
0.1
0.2
0.3
0.4
z
(z)

Lec. 0212735: Urban Systems Modeling Probability
linear transformation of a normal random variable
20
′
1
; , ≜1
2exp
12
Pdf:
linear transf.:
1
2exp
12
1
-2 0 2 4 6 8 100
0.5
1
x, y
F x(x),
F y(y)
-2 0 2 4 6 8 10
0
0.1
0.2
0.3
0.4
x, y
p x(x),
p y(y)
=0 ; =1=1 ; =1.5=2 ; =2
; ,
the linear transformation of a normal RV is still a normal RV. The transformation of the parameters follows the rule of transformation for first and second moment.

Lec. 0212735: Urban Systems Modeling Probability
log‐normal distribution
21
explog
1
12
exp12 log 0
0 0≜ ln ; ,
exp 2
; ,12
exp12
exp 1
ln 1 ≅ ; ln 2 ≅ ln -1 0 1 2
x
p x(x) ,
Fx(x
)
=E(x)
1
0
x
y
y = exp(x)x = log(y)
0
1
2
3
4
5
py(y) , Fy(y)
y
E(y)exp()
1
0
var exp 1 exp 2
moments:
approximation: ≪ 1 → ≅ exp ; ≅
inverse relations:

Lec. 0212735: Urban Systems Modeling Probability
log‐normal distributiont [cont.]
22
explog
1
12
exp12 log 0
0 0≜ ln ; ,
; ,12
exp12
‐ Asymmetrical distribution;‐ only positive values are
possible.‐ For small cov ( 1), log‐
normal is similar to normal.
Φ
‐ Cumulative distribution:0 1 2 3 4 5 6 7 8 9 10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
z
p(z)
=2, =0.1=1, =0.5=1, =1.5
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 40
2
4
z
p(z)
logn, =1, =0.05norm, =exp()=2.72, ==0.136

Lec. 0212735: Urban Systems Modeling Probability
0 5 10 15
0
0.05
0.1
0.15
0.2
0.25
p(y)
[m
-1]
0 5 10 150
0.5
1
y [m]
F(y)
0 5 10 15
0
0.05
0.1
0.15
0.2
0.25
p(y)
[m
-1]
0 5 10 150
0.5
1
y [m]
F(y)
example: design of a levee
23
: height of water level ln ; , 6m var 2m11m: height of barrier P ?
1 Φlog
2.1%
33.3% ln 1 32.4% ln 2 1.74 ln 1.79
P 1
Find ∗: P ∗ 5%∗ exp ∙ Φ 1
: st. normal: normal
: log‐normal9.71m
2.1%5.0%
http://www.zmescience.com/ecology/environmental‐issues/levees‐at‐work‐against‐mississippi‐flood‐4234323/
∗

Lec. 0212735: Urban Systems Modeling Probability
exponential distribution
24
-1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
x []
p(x)
, F
(x)
p(x)F(x)
1 exp 00 0
; ≜ exp 00 0
Pdf:
Cdf:
1
1
var1
moments:
1application: if events occurs following a Poisson process with rate , then the inter‐arrival time is exponential with .

Lec. 0212735: Urban Systems Modeling Probability
PART II
multi‐variate distribution models
25

Lec. 0212735: Urban Systems Modeling Probability
joint, marginal, conditional probability
26
Two random variables: and .
example: : force applied to a structure during an exceptional event.: damage experienced by a structure
what is , [marginal probability] e.g. what is the prob. of high force?what is , [joint probability] e.g. what is the prob. of high force
AND mild damage?what is [conditional probability] e.g. what is the prob. of severe
damage GIVEN low force?what is [conditional probability] e.g. what is the prob. of high force
GIVEN high damage?
the pair , : is a complete representation of this small “world”.
queries:
Y ′severe damage′ X ′low force′X ′low force′, Y ′severe damage′
X ′low force′
conditional probability :
marginal probability :
Y ′severe damage′ X ′low force′, Y ′severe damage′ ⋯X ′high force′, Y ′severe damage′
mutually exclusive events

Lec. 0212735: Urban Systems Modeling Probability
Y 1 Y 2 Y 3 Y 4 Y 5 Y 6 Y 1 Y 2 Y 3 Y 4 Y 5 Y 6
X 1 2.1% 5.6% 4.2% 3.5% 2.1% 0.7% 18.2% 11.5% 30.8% 23.1% 19.2% 11.5% 3.8% 100%X 2 2.8% 4.9% 7.0% 6.3% 4.9% 2.8% 28.7% 9.8% 17.1% 24.4% 22.0% 17.1% 9.8% 100%X 3 1.4% 4.2% 9.1% 12.6% 7.0% 3.5% 37.8% 3.7% 11.1% 24.1% 33.3% 18.5% 9.3% 100%X 4 0.7% 1.4% 2.8% 3.5% 4.9% 2.1% 15.4% 4.5% 9.1% 18.2% 22.7% 31.8% 13.6% 100%
7.0% 16.1% 23.1% 25.9% 18.9% 9.1%
X 1 30.0% 34.8% 18.2% 13.5% 11.1% 7.7%X 2 40.0% 30.4% 30.3% 24.3% 25.9% 30.8%X 3 20.0% 26.1% 39.4% 48.6% 37.0% 38.5%X 4 10.0% 8.7% 12.1% 13.5% 25.9% 23.1%
100% 100% 100% 100% 100% 100%
probability tables
27
,
,: tables, dimension
: vector, dimension 1
: vector, dimension 1
Joint probability:
,,
, 0 ,,
1
Marginal probability:
Conditional probability:, ,
,

Lec. 0212735: Urban Systems Modeling Probability
Y 1 Y 2 Y 3 Y 4 Y 5 Y 6 Y 1 Y 2 Y 3 Y 4 Y 5 Y 6
X 1 2.1% 5.6% 4.2% 3.5% 2.1% 0.7% 18.2% 11.5% 30.8% 23.1% 19.2% 11.5% 3.8% 100%X 2 2.8% 4.9% 7.0% 6.3% 4.9% 2.8% 28.7% 9.8% 17.1% 24.4% 22.0% 17.1% 9.8% 100%X 3 1.4% 4.2% 9.1% 12.6% 7.0% 3.5% 37.8% 3.7% 11.1% 24.1% 33.3% 18.5% 9.3% 100%X 4 0.7% 1.4% 2.8% 3.5% 4.9% 2.1% 15.4% 4.5% 9.1% 18.2% 22.7% 31.8% 13.6% 100%
7.0% 16.1% 23.1% 25.9% 18.9% 9.1%
relations between probability tables
28
,
,
,product (chain) rule
definition of conditional
1
, ∑ ,1[ proof:
jointmarginalconditional
jointmarginal
conditional
]
“everything follows from the joint”
“you can build the joint…”

Lec. 0212735: Urban Systems Modeling Probability
12
34
12
34
56
0
0.02
0.04
0.06
0.08
0.1
0.12
Y
X
P(X
,Y)
12
34
12
34
56
0
0.05
0.1
0.15
0.2
0.25
0.3
Y
XP
(Y
X)
relations among joint, marginal, conditional probability
29
,,
1
,,
,
1 2 3 40
0.2
X
P(X
)
1 2 3 4 5 60
0.1
0.2
Y
P(Y
)
,
1

Lec. 0212735: Urban Systems Modeling Probability
Rules: sum, product, Bayes’ formula
30
,
Sum Rule
Product [chain] Rule,
Conditional≜
,
,
X Y
X Y
Bayes’ Rule
arc reversal
models for ,
: force : damage
products
damage force
force
force damage
e.g.: input
vulnerabilityinference

Lec. 0212735: Urban Systems Modeling Probability
independency
31
: number of leaves on a tree in Japan
http://entertainmentguide.local.com/meaning‐japanese‐tree‐art‐10785.html
: number of cracks on the R. Clemente Bridge
http://en.wikipedia.org/wiki/File:Pittsburgh_Tenth_Street_Bridge_from_Bluff_downsteam.JPG
⟺
⟺ independent of :
,
,
the joint derives by the marginal probs.
X Y
Lec. 0212735: Urban Systems Modeling Probability
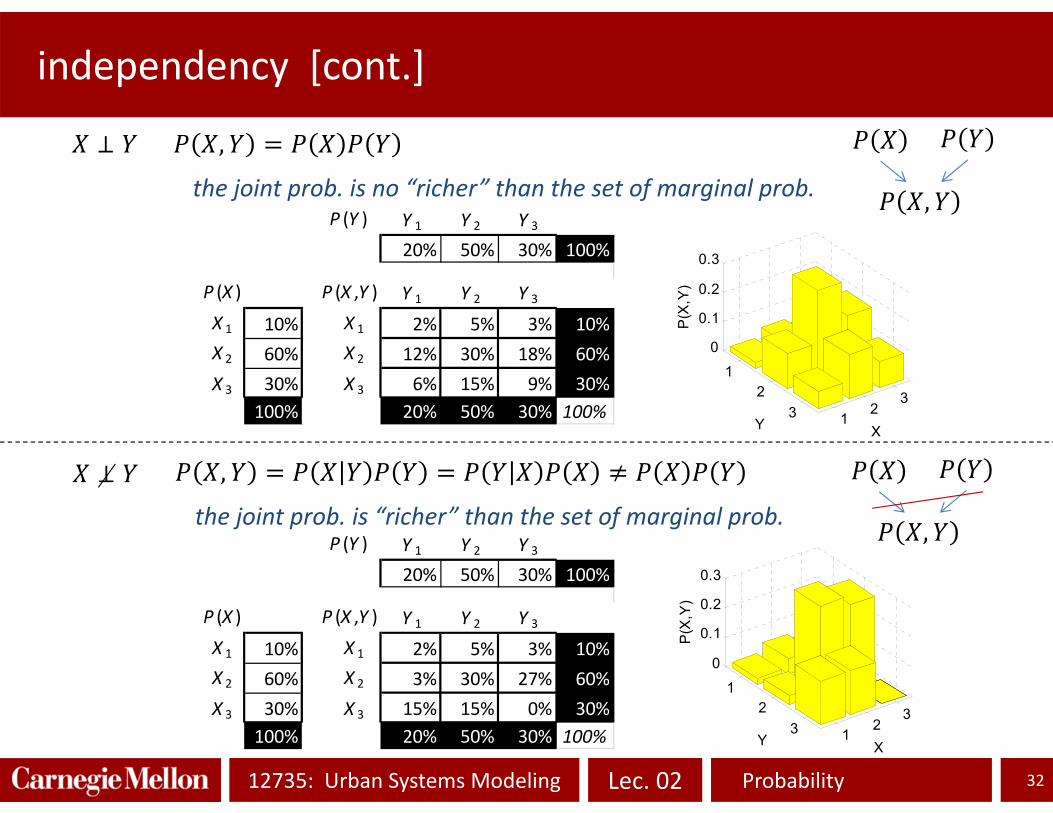
P (Y ) Y 1 Y 2 Y 3
20% 50% 30% 100%
P (X ) P (X ,Y ) Y 1 Y 2 Y 3
X 1 10% X 1 2% 5% 3% 10%X 2 60% X 2 3% 30% 27% 60%X 3 30% X 3 15% 15% 0% 30%
100% 20% 50% 30% 100%
P (Y ) Y 1 Y 2 Y 3
20% 50% 30% 100%
P (X ) P (X ,Y ) Y 1 Y 2 Y 3
X 1 10% X 1 2% 5% 3% 10%X 2 60% X 2 12% 30% 18% 60%X 3 30% X 3 6% 15% 9% 30%
100% 20% 50% 30% 100%
independency [cont.]
32
,
,
,
,the joint prob. is “richer” than the set of marginal prob.
the joint prob. is no “richer” than the set of marginal prob.
12
3
12
3
0
0.1
0.2
0.3
XY
P(X
,Y)
12
3
12
3
0
0.1
0.2
0.3
XY
P(X
,Y)

Lec. 0212735: Urban Systems Modeling Probability
O,G ¬O,GE,G 0.6% 2.4% 3%¬E,G 1.4% 15.6% 17%
2% 18%
O,¬G ¬O,¬GE,¬G 2.4% 9.6% 12%¬E,¬G 5.6% 62.4% 68%
8% 72%
example of risk assessment with binary rand. var.s
33
E 15%O 10%
E O 2 E 30%
E, O E O O 30%10% 3%
E, O E E, O 15% 3% 12%
G 20% independent of Electricity, Oil
E, O O E, O 10% 3% 7%
E, O O E, O 90% 12% 78%
E 1 E 85%O 1 O 90%
E, O, G E, O G 62.4%
O ¬OE 3% 12% 15%¬E 7% 78% 85%
10% 90%
1 E, O, G 37.6%
G 1 G 80%
Shortage ofElectricity
Oil
reliability:dependency:
1 E, O 22%
GasReliability:
, , G, G
, , G, G
same results using P ∨ P P P ∙ P

Lec. 0212735: Urban Systems Modeling Probability
curse of dimensionality
34
⋮
: 1, … ,
: 1, … ,
: 1, … ,⋮
# ∙ ⋯∙
number of “bins” for each dimension
∀ : 20
[Bishop, 2006]
→ # 201 2 3 4 5 6 7
101
103
105
107
109
# rv.s
# X

Lec. 0212735: Urban Systems Modeling Probability
multivariate continuous distributions
35
x1
x 2
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
, ≜ lim→
P ∈ , Δ , ∈ , ΔΔ
joint distribution:
00.2
0.40.6
0.81
0
0.5
10
2
4
6
8
10
12
x1x2
p(x 1,x
2)
contour plot:zero on the borders
, 0
, 1
positive
normalizedmaximum

Lec. 0212735: Urban Systems Modeling Probability
multivariate continuous distributions [cont.]
36
00.2
0.40.6
0.81
0
0.5
10
2
4
6
8
10
12
p(x2)
x1
p(x1,x2=0.45)p(x1=0.35,x2)
x2
p(x1)
p(x 1,x
2)
x1
x 2
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
, , 0
, 1
,
,
, ,
marginal distributions:joint distribution:
conditional:contour plot:
positive
normalized

Lec. 0212735: Urban Systems Modeling Probability
multivariate continuous conditional distributions
37
00.2
0.40.6
0.81
0
0.5
10
2
4
6
8
x1x2
p(x 2
x 1)
00.2
0.40.6
0.81
0
0.5
10
1
2
3
4
5
x1x2
p(x 1
x 2)
, ,conditional:
, , 0
, 1
,
,
marginal distributions:joint distribution:
positive
normalized

Lec. 0212735: Urban Systems Modeling Probability
independency
38
, chain rule, it always holds
⇒ , ⇒
[⟺ ]
x1
x 2
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
00.2
0.40.6
0.81
0
0.5
10
2
4
6
8
10
p(x2)
x1
p(x1,x2=0.17)p(x1=0.225,x2)
x2
p(x1)
p(x 1,x
2)
contour plot:

Lec. 0212735: Urban Systems Modeling Probability
independency [cont.]
39
, chain rule, it always holds
⇒ , ⇒
[⟺ ]
0
0.5
1
0
0.5
10
0.5
1
1.5
2
2.5
3
x1x2
p(x 2
x 1)
0
0.5
1
0
0.5
10
0.5
1
1.5
2
2.5
3
x1x2
p(x 1
x 2)

Lec. 0212735: Urban Systems Modeling Probability
expectation, first and second moments
40
≜ , ,
Expectation of function of a random variable
continuous [same for discrete]
Linearity of expectation still holds
≜
≜
, ,
≜ var
≜ var
≜
first and second moments
covariance
0 if ⇢ ; ⇢ ;0 if ⇢ ; ⇢ ;
sign of covariance
if a function depends on only, we can compute using the marginal on .
Lec. 0212735: Urban Systems Modeling Probability
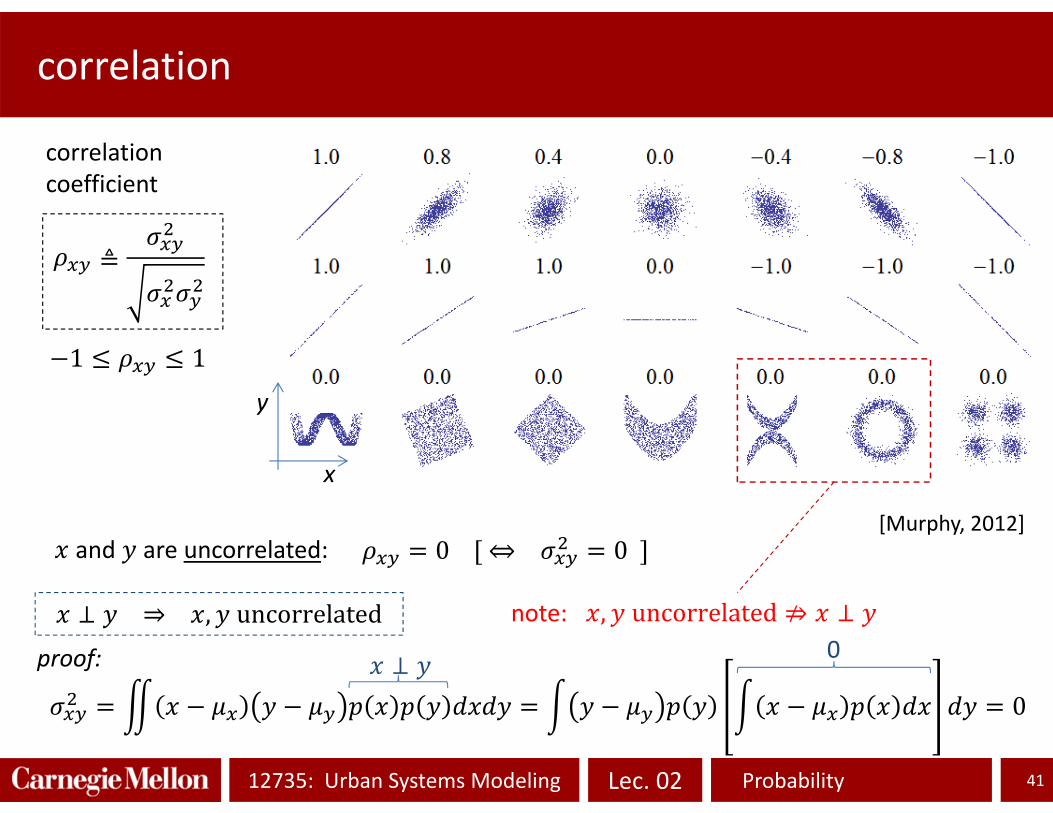
correlation
41
≜
1 1
[Murphy, 2012]
correlationcoefficient
x
y
0 ⇔ 0and are uncorrelated:
⇒ , uncorrelated
0
note: , uncorrelated ⇏
0proof:
Lec. 0212735: Urban Systems Modeling Probability
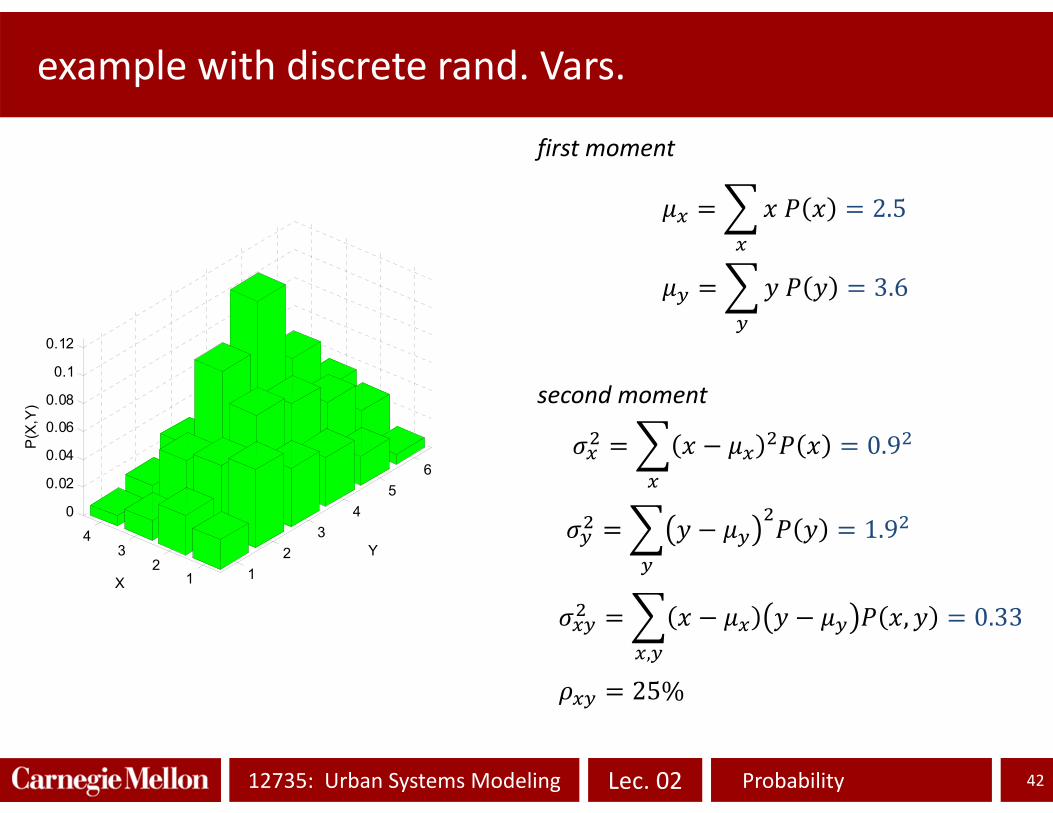
example with discrete rand. Vars.
42
12
34
12
34
56
0
0.02
0.04
0.06
0.08
0.1
0.12
Y
X
P(X
,Y)
25%
0.9
,,
0.33
2.5
3.6
1.9
first moment
second moment

Lec. 0212735: Urban Systems Modeling Probability
vector notation, moments for multivariate rand. vars.
43
, , … ,⋮
⋮
≜ ;
……
⋮ ⋮ ⋱ ⋮…
00
… 0… 0
⋮ ⋮0 0
⋱ ⋮…
11
……
⋮ ⋮ ⋱ ⋮… 1
00
… 0… 0
⋮ ⋮0 0
⋱ ⋮…
vector of rv.s joint probability
dimension: 1
⟶ 1
first moment: mean vector
second moment: covariance matrix
«correlation matrix»diagonal matrix of standard deviation
positive and normalized
variance on the diagonal
covariance out the diagonal
1

Lec. 0212735: Urban Systems Modeling Probability
expectation for multi‐variate rand. var.s
44
Expectation of function of a vector of random variables
continuous
Linearity of expectation
≜ →
Linear transformation
: ⟶
dimension: ∶ 1 :
: 1
≜
≜
proofs for linear transformation:
∶∶ 1

Lec. 0212735: Urban Systems Modeling Probability
expectation for multi‐variate rand. var.s
45
≜ → 0
Linear uni‐variate function (hyper‐plane): ⟶
properties of covariance matrix:
symmetry: positive definiteness: ∀ ∈ : 0
x1
x 2
0 0.5 10
0.5
1
x1
x 2
0 0.5 10
0.2
0.4
0.6
0.8
1
00.5
1
0
0.5
1-5
0
5
x1x2
y
≜ →
Linear transformation

Lec. 0212735: Urban Systems Modeling Probability
refereces
46
on wikipedia:Probability interpretations ‐ Frequentist probability ‐ Probability axioms ‐Bayesian probability ‐ Random variable ‐ Normal distribution ‐ Log‐normal distribution ‐ Exponential distribution ‐ Joint probability distribution ‐ Conditional probability ‐ Marginal distribution ‐ Independence (probability theory)
Kroese D.P., A Short Introduction to Probability, Downloadable form www.maths.uq.edu.au/~kroese/asitp.pdf
MacKay, D. (2003). Information Theory. Inference and Learning Algorithms. Cambridge University Press. Downloadable from http://www.inference.phy.cam.ac.uk/mackay/itila/ch2, pg.22‐32
Pictures from:Bishop, C. (2006). Pattern Recognition and Machine Learning. SpringerMurphy, K. (2012). Machine Learning, a probabilistic perspective. MIT press.

Lec. 0212735: Urban Systems Modeling Probability
MW Matlab ‐ commands
47
sum(v) : sum of the components of vector ‘v’.
p=normpdf(y,mu,sigma) : normal pdf, with mean mu and st.dev. sigma, at y.F=normcdf(y,mu,sigma) : normal cdf, with mean mu and st.dev. sigma, at y.p=pdf(‘logn’,y,lambda,zeta) : log‐normal pdf, with parameters lambda and zeta, at y.F=cdf(‘logn’,y,lambda,zeta) : log‐normal cdf, with parameters lambda and zeta, at y.z=norminv(F) : inverse standard normal cdf, computed at F.
bar(v) : bar plot of vector ‘v’. bar3(M) : bar plot of matrix ‘M’. plot(vx,vy) : plot of lines connecting points in vectors ‘vx’ (x‐coordinates) and ‘vy’ (y‐
coord.)surf(vx,vy,M) : surface plot of grid with x‐coordinates (‘vx’) and y‐coordinates (‘vy’),
defined in matrix ‘M’.contour(vx,vy,M) : surface plot of grid with x‐coordinates (‘vx’) and y‐coordinates (‘vy’),
defined in matrix ‘M’.





























