Embed Size (px)
Citation preview

INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL
GESTIÓN DE LA PROTECCIÓN ADAPTATIVA DE CORTOCIRCUITOS EN UNA ARQUITECTURA DUAL
VOLTAGE 14 V/42 V BASADA EN PROTOCOLO CAN
AUTOR: Javier Duque Guerrero
DIRECTOR: Javier Maixé Altés
FECHA: Septiembre 2006

INFORMACIÓ CONFIDENCIAL
Aquest projecte conté informació confidencial que no ha estat publicada, per obtenir més informació adreçar-se a:
Javier Maixé Altés Teléfon: 977 559 632 Fax: 977 559 605 E-mail: [email protected]

ÍNDICE
1
ÍNDICE 1. MEMORIA DESCRIPTIVA 1.1. Objeto del proyecto ................................................................................................... 1 1.2. Titular ............................................................................................................................ 1 1.3. Antecedentes ................................................................................................................ 1 1.3.1. Sistema eléctrico 42 V Powernet................................................................................ 2 1.3.1.1. ¿Por qué 42 V? ..................................................................................................... 5 1.3.2. Sistema eléctrico Dual Voltage 14 V/42 V................................................................. 7 1.3.3. Comunicaciones digitales en el vehículo................................................................... 8 1.3.4. Problemática de los cortocircuitos.......................................................................... 11 1.4. Posibles soluciones y solución adoptada ........................................................... 12 1.4.1. Arquitectura Dual Voltage 14 V/42 V ...................................................................... 12 1.4.1.1. Alternador de 42 V, batería de 36 V y convertidor DC/DC 42 V/14 V.............. 12 1.4.1.2. Alternador de 42 V, baterías de 36 y 12 V y convertidor DC/DC 42 V/14 V........... .......................................................................................................................................... 13 1.4.1.3. Alternador de dos salidas (14 V y 42 V) y baterías de 36 V y 12 V .................... 14 1.4.1.4. Solución adoptada .............................................................................................. 15 1.4.2. Sistema de comunicaciones ..................................................................................... 16 1.4.2.1. CCD (Chrysler Collision Detection) .................................................................. 16 1.4.2.2. SAE J1850 .......................................................................................................... 16 1.4.2.3. J1939................................................................................................................... 17 1.4.2.4. VAN (Vehicle Area Network)............................................................................. 17 1.4.2.5. PALMNET (Protocol for Automotive Low and Medium speed NETwork)........... .......................................................................................................................................... 17 1.4.2.6. CAN (Controller Area Network) ........................................................................ 18 1.4.2.7. TTP (Time Triggered Protocol) ......................................................................... 19 1.4.2.8. TTCAN (Time Triggered Controller Area Network)......................................... 19 1.4.2.9. LIN (Local Interconnect Network) .................................................................... 20 1.4.2.10. Volcano.............................................................................................................. 21 1.4.2.11. ByteFlight o SI-bus .......................................................................................... 21 1.4.2.12. FlexRay............................................................................................................. 21

ÍNDICE
2
1.4.2.13. DC-BUS ............................................................................................................ 22 1.4.2.14. Solución adoptada ............................................................................................ 22 1.4.3. Interruptores ............................................................................................................ 23 1.4.3.1. Solución adoptada .............................................................................................. 23 1.4.4. Sistema de control del proceso................................................................................ 23 1.4.4.1. Solución adoptada .............................................................................................. 24 1.4.5. Detección de cortocircuitos ..................................................................................... 24 1.4.5.1. Detección por tensión......................................................................................... 24 1.4.5.2. Detección por corriente ...................................................................................... 25 1.4.5.3. Solución adoptada .............................................................................................. 25 1.5. Descripción general de la solución adoptada.................................................. 26 1.5.1. Arquitectura empleada............................................................................................ 26 1.5.2. Detección de los cortocircuitos................................................................................ 27 1.5.2.1. Cortocircuito 12 V - GND .................................................................................. 29 1.5.2.2. Cortocircuito 36 V – GND.................................................................................. 30 1.5.2.3. Cortocircuito 36 V – 12 V................................................................................... 31 1.5.3. Localización y aislamiento del cortocircuito.......................................................... 33 1.6. Prescripciones Técnicas ......................................................................................... 35 1.6.1. Microcontrolador PIC18F258................................................................................. 35 1.6.2. Transceiver de CAN PCA82C251 ........................................................................... 36 1.6.3. Transceiver de CAN TJA1054................................................................................. 37 1.6.4. Cuádruple Comparador de tensión LM339........................................................... 38 1.6.5. Doble Amplificador Operacional LM258 .............................................................. 39 1.6.6. Potenciómetros digitales MCP41010 y MCP42010 ............................................... 40 1.6.7. Transductor de corriente LA 55-P/SP1.................................................................. 41 1.6.8. Transductor de corriente HAS 100-S..................................................................... 42 1.6.9. PROFET BTS 640 S2............................................................................................... 43 1.6.10. PROFET BTS 660P ............................................................................................... 44 1.6.11. Diodo Schottky 40CPQ060.................................................................................... 45 1.6.12. Supresor de transitorios 5KP24A ......................................................................... 46 1.7. Planificación y Programación .............................................................................. 46

ÍNDICE
3
1.8. Puesta en marcha y funcionamiento .................................................................. 47 1.8.1. Placas del sistema y conexiones............................................................................... 48 1.8.1.1. Placa del Nodo 12 V ........................................................................................... 48 1.8.1.2. Placa del Nodo 36 V ........................................................................................... 51 1.8.1.3. Placas de los nodos de cargas ............................................................................ 52 1.8.1.4. Placa de cortocircuitos ....................................................................................... 53 1.8.2. Montaje del sistema ................................................................................................. 54 1.8.3. Comprobaciones y ajustes ....................................................................................... 54 1.9. Resumen del presupuesto ...................................................................................... 55 2. MEMORIA DE CÁLCULO 2.1. Circuitos comparadores de tensión...................................................................... 1 2.1.1. Comparador para cortocircuitos 12 V – GND ........................................................ 1 2.1.2. Comparador para cortocircuitos 36 V – 12 V en Nodo 12 V.................................. 3 2.1.3. Comparador para cortocircuitos 36 V – GND y 36 V - 12 V.................................. 4 2.2. Circuitos comparadores de corriente .................................................................. 5 2.2.1. Nodo de 12 V .............................................................................................................. 5 2.2.1.1. Comparador para cortocircuitos 12 V – GND................................................... 10 2.2.1.2. Comparador para cortocircuitos 36 V – 12 V.................................................... 11 2.2.2. Nodo de 36 V ............................................................................................................ 11 2.2.2.1. Comparadores para cortocircuitos 36 V- GND y 36 V – 12 V .......................... 14 2.3. Respuesta de los comparadores........................................................................... 15 2.3.1. Cortocircuito 12 V – GND....................................................................................... 15 2.3.2. Cortocircuito 36 V – GND....................................................................................... 16 2.3.3. Cortocircuito 36 V – 12 V........................................................................................ 16 2.4. Mensajes por bus CAN........................................................................................... 18 2.4.1. Trama de cortocircuito 12 V – GND tratable en rama 1 con HS-CAN............... 20 2.4.2. Trama de cortocircuito 36 V – GND tratable en rama 2 con HS-CAN............... 21 2.4.3. Trama de cortocircuito 36 V – 12 V tratable en rama 1 con HS-CAN................ 22 2.4.4. Trama de ajuste del comparador de tensión de 12 V – GND con FT-CAN ........ 22

ÍNDICE
4
2.4.5. Trama de ajuste del comparador de corriente de 36 V – GND con FT-CAN..... 23 2.5. Tramas SPI................................................................................................................. 23 2.5.1. Trama para el potenciómetro del comparador de tensión 12 V – GND.............. 25 2.5.2. Trama para el potenciómetro del comparador de tensión de la batería 36 V .... 26 2.6. Protecciones de los interruptores........................................................................ 26 2.7. Sistema de Alimentación Autónomo.................................................................. 28 2.8. Diagramas de flujo de los programas................................................................ 30 2.8.1. Programa del Nodo 12 V ......................................................................................... 30 2.8.1.1. Rutina de atención a interrupción de alta prioridad ......................................... 33 2.8.1.2. Rutina de atención a interrupción de baja prioridad ........................................ 37 2.8.2. Programa del Nodo 36 V ......................................................................................... 38 2.8.2.1. Rutina de atención a interrupción de alta prioridad ......................................... 42 2.8.2.2. Rutina de atención a interrupción de baja prioridad ........................................ 46 2.8.3. Programa de los nodos de carga ............................................................................. 47 2.8.3.1. Rutina de atención a interrupción de alta prioridad ......................................... 49 2.8.3.2. Rutina de atención a interrupción de baja prioridad ........................................ 50 2.9. Ensayos y resultados de la gestión de cortocircuitos.................................... 50 2.9.1. Cortocircuito 12 V – GND....................................................................................... 51 2.9.2. Cortocircuito 36 V – GND....................................................................................... 55 2.9.3. Cortocircuito 36 V – 12 V........................................................................................ 58 2.10. Tiempo de reacción del sistema......................................................................... 62 2.11. Tensión y corriente durante la gestión de los cortocircuitos................... 62 2.11.1. Cortocircuito 12 V – GND..................................................................................... 63 2.11.2. Cortocircuito 36 V – GND..................................................................................... 64 2.11.3. Cortocircuito 36 V – 12 V...................................................................................... 65 2.11.4. Pruebas con cargas más elevadas ......................................................................... 66 2.11.5. Pruebas con alternador de 40 V............................................................................ 67 2.12. Conclusiones del estudio y ensayos .................................................................. 67

ÍNDICE
5
3. PLANOS
3.1. Esquema del hardware del Nodo 12 V............................................................................ 1 3.2. Esquema del hardware del Nodo 36 V............................................................................ 2 3.3. Esquema del hardware de los Nodos de carga ............................................................... 3 3.4. Esquema del hardware de la placa de cortocircuitos .................................................... 4 3.5. Distribución de componentes en la placa hardware del Nodo 12 V ............................. 5 3.6. Trazado de pistas en la cara de componentes de la placa hardware del Nodo 12 V ... 6 3.7. Trazado de pistas en la cara inferior de la placa hardware del Nodo 12 V ................. 7 3.8. Distribución de componentes en la placa hardware del Nodo 36 V ............................. 8 3.9. Trazado de pistas en la cara de componentes de la placa hardware del Nodo 36 V... 9 3.10. Trazado de pistas en la cara inferior de la placa hardware del Nodo 36 V ............. 10 3.11. Distribución de componentes en las placas hardware de los Nodos de carga.......... 11 3.12. Trazado de pistas en la cara de componentes de las placas hardware de los Nodos de carga ......................................................................................................................... 12 3.13. Trazado de pistas en la cara inferior de las placas hardware de los Nodos de carga .. ....................................................................................................................................... 13 3.14. Distribución de componentes en la placa hardware de cortocircuitos ..................... 14 3.15. Trazado de pistas en la cara de componentes de la placa hardware de cortocircuitos ....................................................................................................................................... 15 3.16. Trazado de pistas en la cara inferior de la placa hardware de cortocircuitos......... 16 4. PRESUPUESTO 4.1. Cuadro de precios ...................................................................................................... 1 4.1.1. Capítulo 1: Hardware del Nodo 12 V....................................................................... 1 4.1.1.1. Material electrónico ............................................................................................. 1 4.1.1.2. Fabricación de la placa ........................................................................................ 3 4.1.2. Capítulo 2: Hardware del Nodo 36 V....................................................................... 3 4.1.2.1. Material electrónico ............................................................................................. 3 4.1.2.2. Fabricación de la placa ........................................................................................ 6 4.1.3. Capítulo 3: Hardware de los Nodos de carga .......................................................... 6 4.1.3.1. Material electrónico ............................................................................................. 6 4.1.3.2. Fabricación de la placa ........................................................................................ 8

ÍNDICE
6
4.1.4. Capítulo 4: Hardware de la placa de cortocircuitos ............................................... 8 4.1.4.1. Material eléctrico.................................................................................................. 8 4.1.4.2. Fabricación de la placa ........................................................................................ 8 4.2. Cantidades .................................................................................................................... 9 4.2.1. Capítulo 1: Hardware del Nodo 12 V....................................................................... 9 4.2.1.1. Material electrónico ............................................................................................. 9 4.2.1.2. Fabricación de la placa ...................................................................................... 11 4.2.2. Capítulo 2: Hardware del Nodo 36 V..................................................................... 11 4.2.2.1. Material electrónico ........................................................................................... 11 4.2.2.2. Fabricación de la placa ...................................................................................... 13 4.2.3. Capítulo 3: Hardware de los Nodos de carga ........................................................ 14 4.2.3.1. Material electrónico ........................................................................................... 14 4.2.3.2. Fabricación de la placa ...................................................................................... 15 4.2.4. Capítulo 4: Hardware de la placa de cortocircuitos ............................................. 16 4.2.4.1. Material eléctrico................................................................................................ 16 4.2.4.2. Fabricación de la placa...................................................................................... 16 4.3. Aplicación de precios .............................................................................................. 17 4.3.1. Capítulo 1: Hardware del Nodo 12 V..................................................................... 17 4.3.1.1. Material electrónico ........................................................................................... 17 4.3.1.2. Fabricación de la placa ...................................................................................... 19 4.3.2. Capítulo 2: Hardware del Nodo 36 V..................................................................... 20 4.3.2.1. Material electrónico ........................................................................................... 20 4.3.2.2. Fabricación de la placa ...................................................................................... 22 4.3.3. Capítulo 3: Hardware de los Nodos de carga ........................................................ 23 4.3.3.1. Material electrónico ........................................................................................... 23 4.3.3.2. Fabricación de la placa ...................................................................................... 25 4.3.4. Capítulo 4: Hardware de la placa de cortocircuitos ............................................. 25 4.3.4.1. Material eléctrico................................................................................................ 25 4.3.4.2. Fabricación de la placa..................................................................................... 25 4.4. Resumen del Presupuesto ...................................................................................... 26 4.4.1. Precio de Ejecución Material .................................................................................. 26 4.4.2. Presupuesto de Ejecución por Contrato................................................................. 27

ÍNDICE
7
4.4.3. Precio de Licitación.................................................................................................. 27 5. PLIEGO DE CONDICIONES 5.1. Reunidos........................................................................................................................ 1 5.2. Exponen ......................................................................................................................... 1 5.2.1. Primero ....................................................................................................................... 1 5.2.2. Segundo....................................................................................................................... 1 5.3. Cláusulas ....................................................................................................................... 1 5.3.1. Primera. OBJETIVOS .............................................................................................. 1 5.3.2. Segunda. OBJETO DEL ACUERDO ...................................................................... 1 5.3.3. Tercera. CONDICIONES DE ACEPTACIÓN DEL TRABAJO .......................... 2 5.3.4. Cuarta. EXTENSIÓN DE LA COLABORACIÓN................................................. 2 5.3.5. Quinta. CONTENIDO DE LOS PROGRAMAS ESPECÍFICOS ......................... 2 5.3.6. Sexta. CONFIDENCIALIDAD................................................................................. 2 5.3.7. Séptima. COORDINADORES/RESPONSABLES ................................................. 4 5.3.8. Octava. EMISIÓN DE INFORMES......................................................................... 4 5.3.9. Novena. DURACIÓN................................................................................................. 4 5.3.10. Décima. IMPORTE Y CONDICIONES DE PAGO ............................................. 4 5.3.11. Undécima. FORMA DE PAGO .............................................................................. 4 5.3.12. Duodécima. MODIFICACIÓN Y RESCISIÓN DEL CONTRATO ................... 5 5.3.13. Decimotercera. PRINCIPIOS DE ACTUACIÓN ................................................. 5 5.3.14. Decimocuarta. RESOLUCIÓN DE CONFLICTOS ............................................. 5 ANEXO 1. CÓDIGOS FUENTE A1.1. Código fuente del nodo de 12 V ......................................................................... 1 A1.2. Código fuente del nodo de 36 V ....................................................................... 10 A1.3. Código fuente del nodo de carga 1 .................................................................. 22 A1.4. Código fuente del nodo de carga 2 .................................................................. 26

ÍNDICE
8
ANEXO 2. PROTOCOLO CAN A2.1. Conceptos básicos ................................................................................................... 1 A2.2. Estructura básica de una trama can ................................................................ 4 A2.3. Tipos de tramas can ............................................................................................... 6 A2.3.1. Trama de datos (Data Frame) ................................................................................ 6 A2.3.1.1. Inicio de trama (Start of Frame, SOF) ............................................................. 7 A2.3.1.2. Campo de arbitraje (Arbitration Field)............................................................. 7 A2.3.1.3. Campo de control (Control Field) ..................................................................... 8 A2.3.1.4. Campo de datos (Data Field)............................................................................. 9 A2.3.1.5. Campo de control de errores (CRC Field) ........................................................ 9 A2.3.1.6. Campo de reconocimiento (Acknowledge Field) ............................................ 10 A2.3.1.7. Fin de trama (End of Frame).......................................................................... 10 A2.3.2. Trama remota (Remote Frame)............................................................................ 10 A2.3.3. Trama de error (Error Frame)............................................................................. 11 A2.3.3.1. Tipos de errores de bus .................................................................................... 11 A2.3.3.2. Estados de un nodo.......................................................................................... 11 A2.3.3.3. Estructura de una trama de error ................................................................... 12 A2.3.3.4. Campo de indicador de error........................................................................... 12 A2.3.3.5. Delimitador de error ........................................................................................ 13 A2.3.4. Trama de sobrecarga (Overload Frame) ............................................................. 13 A2.3.5. Espacio entre tramas (Interframe Space) ............................................................ 14 A2.4. Sincronización de los nodos del bus................................................................ 15 A2.5. Velocidad de transmisión ................................................................................... 16

ÍNDICE DE FIGURAS
1
ÍNDICE DE FIGURAS 1. MEMORIA DESCRIPITIVA Figura 1.1. Potencia eléctrica demandada en los automóviles y estimaciones para los próximos años......................................................................................................................... 2 Figura 1.2. Corriente y sección del cableado para 14 V y 42 V en función de las previsiones de potencia para gama media de la figura 1.1. ............................................................. 4 Figura 1.3. Niveles de tensión en el sistema eléctrico de 42 V y especificaciones para los semiconductores...................................................................................................... 5 Figura 1.4. Evolución de la tecnología de 42 V hasta tener un sistema “puro” de 42 V. .......... 7 Figura 1.5. Red de comunicaciones en un automóvil. ............................................................. 10 Figura 1.6. Lugares donde puede aparecer cortocircuito en una arquitectura Dual Voltage 14 V/42 V. ............................................................................................................. 11 Figura 1.7. Arquitectura Dual Voltage con alternador de 42 V, batería de 36 V y DC/DC 42 V/14 V.............................................................................................................. 12 Figura 1.8. Arquitectura Dual Voltage con alternador de 42 V, baterías de 36 V y 12 V y DC/DC 42 V/14 V. ............................................................................................... 13 Figura 1.9. Arquitectura Dual Voltage con alternador de doble salida y dos baterías............. 14 Figura 1.10. Esquema básico de la arquitectura Dual Voltage empleada, con 2 nodos de baterías, 2 nodos de cargas y una red de comunicaciones................................... 26 Figura 1.11. Localización de los cortocircuitos realizados en este proyecto. .......................... 28 Figura 1.12. Tensión y corriente en la batería de 12 V al producirse un cortocircuito de 12 V - GND......................................................................................................... 29 Figura 1.13. Tensión y corriente en la batería de 36 V al producirse un cortocircuito de 36 V - GND......................................................................................................... 30 Figura 1.14. Camino que sigue la corriente en un cortocircuito 36 V - 12 V.......................... 31 Figura 1.15. Tensión y corriente en la batería de 36 V al producirse un cortocircuito 36 V – 12 V......................................................................................................... 32 Figura 1.16. Tensión y corriente en la batería de 12 V al producirse un cortocircuito 36 V – 12 V......................................................................................................... 32 Figura 1.17. Proceso de localización y eliminación de un cortocircuito 12 V - GND............. 34

ÍNDICE DE FIGURAS
2
Figura 1.18. Patillaje del PIC18F258. ..................................................................................... 35 Figura 1.19. Patillaje del PCA82C251. ................................................................................... 37 Figura 1.20. Patillaje del TJA1054.......................................................................................... 38 Figura 1.21. Pins del LM339................................................................................................... 39 Figura 1.22. Diagrama de pines del LM258............................................................................ 40 Figura 1.23. Diagrama de pines del MCP41010 y MCP42010. .............................................. 41 Figura 1.24. Encapsulado y conexiones del LA 55-P/SP1. ..................................................... 42 Figura 1.25. Encapsulado y conexiones del HAS 100-S. ........................................................ 43 Figura 1.26. Encapsulado y conexiones del BTS 640 S2. ....................................................... 44 Figura 1.27. Encapsulado y conexiones del BTS 660P. .......................................................... 45 Figura 1.28. Encapsulado y conexiones del 40CPQ060.......................................................... 45 Figura 1.29. Ubicación de los elementos más interesantes en la placa del Nodo de 12 V....... 48 Figura 1.30. Ubicación de los elementos más interesantes en la placa del Nodo de 36 V....... 51 Figura 1.31. Ubicación de los elementos más interesantes en las placas de los Nodos de cargas. ................................................................................................................ 52 Figura 1.32. Aspecto de la placa de cortocircuitos. ................................................................. 53 Figura 1.33. Fotografía del sistema montado en el laboratorio. .............................................. 54 2. MEMORIA DE CÁLCULO Figura 2.1. Esquema del comparador de tensión 12 V – GND.................................................. 1 Figura 2.2. Esquema del comparador de tensión 36 V – 12 V del Nodo de 12 V. .................... 3 Figura 2.3. Esquema del comparador de tensión 36 V – GND y 36 V - 12 V en el Nodo de 36 V......................................................................................................................... 4 Figura 2.4. Esquema del acondicionador de corriente para el sensor Hall LA 55-P/SP1. ......... 5 Figura 2.5. Característica del LA 55-P/SP1 y su circuito de acondicionamiento para corrientes positivas. ..................................................................................................................7

ÍNDICE DE FIGURAS
3
Figura 2.6. Respuesta del circuito de acondicionamiento para el LA 55-P/SP1 con corrientes positivas. ................................................................................................................. 8 Figura 2.7. Característica del LA 55-P/SP1 y su circuito de acondicionamiento para corrientes negativas. ................................................................................................................ 9 Figura 2.8. Respuesta del circuito de acondicionamiento para el LA 55-P/SP1 con corrientes negativas. ................................................................................................................ 9 Figura 2.9. Etapa de comparación del “comparador de corriente” para cortocircuitos 12 V - GND........................................................................................................... 10 Figura 2.10. Etapa de comparación del “comparador de corriente” para cortocircuito 36 V – 12 V en el Nodo de 12 V. ........................................................................ 11 Figura 2.11. Esquema del acondicionador de corriente para el sensor Hall HAS 100-S......... 12 Figura 2.12. Característica del HAS 100-S y su circuito de acondicionamiento para corrientes positivas. ............................................................................................................. 13 Figura 2.13. Respuesta del circuito de acondicionamiento para el HAS 100-S. ..................... 13 Figura 2.14. Etapa de comparación del “comparador de corriente” para cortocircuitos 36 V – GND y 36 V – 12 V en el Nodo de 36 V................................................. 14 Figura 2.15. Respuesta de los comparadores ante cortocircuito 12 V – GND......................... 15 Figura 2.16. Respuesta de los comparadores ante cortocircuito 36 V – GND......................... 16 Figura 2.17. Respuesta de los comparadores del Nodo36 ante cortocircuito 36 V – 12 V...... 17 Figura 2.18. Respuesta de los comparadores del Nodo 12 ante cortocircuito 36 V – 12 V..... 17 Figura 2.19. Estructura del byte de dato enviado a los nodos de carga. .................................. 18 Figura 2.20. Trama de CAN con ID = ‘10101010010’ y DATA = ‘11000101’...................... 20 Figura 2.21. Trama de CAN con ID = ‘10101010011’ y DATA = ‘00011010’...................... 21 Figura 2.22. Trama de CAN con ID = ‘10101010010’ y DATA = ‘01011010’...................... 22 Figura 2.23. Trama de CAN con ID = ‘10101010001’ y DATA = ‘10101010 10011101’..... 22 Figura 2.24. Trama de CAN con ID = ‘10101010000’ y DATA = ‘01010101 11101000’..... 23 Figura 2.25. Estructura del Command Byte para los potenciómetros digitales MCP41010 y MCP42010. ......................................................................................................... 24 Figura 2.26. Trama SPI para configurar el potenciómetro del comparador de tensión 12 V - GND......................................................................................................... 25

ÍNDICE DE FIGURAS
4
Figura 2.27. Trama SPI para configurar el potenciómetro del comparador de tensión 36 V - GND......................................................................................................... 26 Figura 2.28. Protecciones para los interruptores del Nodo de 36 V. ....................................... 27 Figura 2.29. Protecciones para los interruptores del Nodo de 12 V. ....................................... 27 Figura 2.30. Sistema de Alimentación Autónomo propuesto. ................................................. 29 Figura 2.31. Apertura/cierre de los interruptores frente a un cortocircuito 12 V – GND en la rama 1................................................................................................................. 51 Figura 2.32. Apertura/cierre de los interruptores frente a un cortocircuito 12 V – GND en la rama 2................................................................................................................. 52 Figura 2.33. Apertura/cierre de los interruptores frente a un cortocircuito 12 V – GND en la rama 1 estando la rama 2 abierta. ....................................................................... 52 Figura 2.34. Apertura/cierre de los interruptores frente a un cortocircuito 12 V – GND en la rama 2 estando la rama 1 abierta. ....................................................................... 53 Figura 2.35. Intento de reconexión no satisfactorio en la rama 1. ........................................... 54 Figura 2.36. Intento de reconexión satisfactorio en la rama 2. ................................................ 54 Figura 2.37. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 1................................................................................................................. 55 Figura 2.38. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 2................................................................................................................. 56 Figura 2.39. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 1 estando la rama 2 abierta. ....................................................................... 56 Figura 2.40. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 2 estando la rama 1 abierta. ....................................................................... 57 Figura 2.41. Intento de reconexión no satisfactorio en la rama 1. ........................................... 57 Figura 2.42. Intento de reconexión satisfactorio en la rama 2. ................................................ 58 Figura 2.43. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – 12 V en la rama 1................................................................................................................. 58 Figura 2.44. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – 12 V en la rama 2................................................................................................................. 59 Figura 2.45. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 1 estando la rama 2 abierta. ........................................................................ 60

ÍNDICE DE FIGURAS
5
Figura 2.46. Apertura/cierre de los interruptores frente a un cortocircuito 36 V – GND en la rama 2 estando la rama 1 abierta. ....................................................................... 60 Figura 2.47. Intento de reconexión no satisfactorio en la rama 1. ........................................... 61 Figura 2.48. Intento de reconexión satisfactorio en la rama 2. ................................................ 61 Figura 2.49. Tensiones y corrientes en un cortocircuito 12 V - GND en la rama S121 – Sbox112. ..................................................................................................... 63 Figura 2.50. Tensiones y corrientes en un cortocircuito 36 V - GND en la rama S361 – Sbox136. ..................................................................................................... 64 Figura 2.51. Tensiones y corrientes en el bus de 36 V en un cortocircuito 36 V - 12 V entre la rama S361 – Sbox136 y la rama S121 – Sbox112. .................................................... 65 Figura 2.52. Tensiones y corrientes en el bus de 12 V en un cortocircuito 36 V - 12 V entre la rama S361 – Sbox136 y la rama S121 – Sbox112. .................................................... 66 ANEXO 2. PROTOCOLO CAN Figura A2.1. Funcionamiento de la lógica en el bus CAN........................................................ 2
Figura A2.2. Tipos de buses CAN y niveles de tensión. ........................................................... 3 Figura A2.3. Terminaciones del bus CAN. ............................................................................... 3 Figura A2.4. Estructura básica de una trama CAN. .................................................................. 4 Figura A2.5. Proceso de arbitraje en el bus CAN...................................................................... 5 Figura A2.6. Estructura de una trama de datos normal. ............................................................ 6 Figura A2.7. Estructura del campo de arbitraje en una trama de datos normal. ........................ 7 Figura A2.8. Estructura del campo de arbitraje en una trama de datos extendida. .................... 7 Figura A2.9. Estructura del campo de control en una trama de datos. ...................................... 8 Figura A2.10. Estructura de una trama de error. ..................................................................... 12 Figura A2.11. Estructura de una trama de sobrecarga. ............................................................ 13 Figura A2.12. Estructura del espacio entre tramas. ................................................................. 14 Figura A2.13. Sincronización del bus CAN............................................................................ 15 Figura A2.14. Divisiones en el tiempo de bit. ......................................................................... 16

ÍNDICE DE TABLAS
1
ÍNDICE DE TABLAS 1. MEMORIA DESCRIPTIVA Tabla 1.1. Potencia de algunas cargas presentes hacia el año 2010........................................... 3 Tabla 1.2. Tecnologías actuales beneficiadas del uso de 42 V Powernet. ................................. 6 Tabla 1.3. Clasificación SAE de los protocolos de comunicación en el automóvil. ................ 10 Tabla 1.4. Tabla funcional del Transceiver PCA82C251........................................................ 37 Tabla 1.5. Tabla operacional del Transceiver TJA1054.......................................................... 38 Tabla 1.6. Diagrama de GANNT de la planificación del proyecto.......................................... 47 Tabla 1.7. Configuración para la selección de los Transceivers.............................................. 49 Tabla 1.8. Señales de configuración de los DC/DC de las cajas de cargas.............................. 53 2. MEMORIA DE CÁLCULO Tabla 2.1. Respuesta del sensor de corriente LA 55-P/SP1 y acondicionamiento con corrientes positivas................................................................................................... 7 Tabla 2.2. Respuesta del sensor de corriente LA 55-P/SP1 y acondicionamiento con corrientes negativas.................................................................................................. 8 Tabla 2.3. Respuesta del sensor de corriente HAS 100-S y su acondicionamiento. ................ 12 Tabla 2.4. Datos posibles entre nodos de batería y nodos de carga. ........................................ 19 Tabla 2.5. Datos para la configuración de los comparadores. ................................................. 19 Tabla 2.6. Identificadores CAN de los nodos. ......................................................................... 19 Tabla 2.7. Valores del Command Byte para los potenciómetros digitales. .............................. 24 ANEXO 2. PROTOCOLO CAN Tabla A2.1. Configuración del DLC en una trama de datos. ..................................................... 9

GESTIÓN DE LA PROTECCIÓN ADAPTATIVA DE CORTOCIRCUITOS EN UNA ARQUITECTURA DUAL VOLTAGE 14 V/42 V BASADA EN PROTOCOLO CAN
Escola Tècnica Superior d’Enginyeria, Universitat Rovira i Virgili
1. MEMORIA DESCRIPTIVA

MEMORIA DESCRIPTIVA
1
1.1. Objeto del proyecto El presente proyecto tiene como objetivo el estudio, diseño y montaje de un prototipo para la gestión adaptativa de cortocircuitos en un sistema eléctrico Dual Voltage 14 V/42 V para el automóvil, empleando como medio de comunicaciones el protocolo y bus CAN. 1.2. Titular El titular del presente proyecto es el Grup d’Automàtica i Electrònica Industrial de la Escola Tècnica Superior d’Enginyeria de la Universitat Rovira i Virgili, cuyo domicilio social se encuentra en la Avinguda dels Països Catalans núm. 26, Campus Sescelades, 43007 de Tarragona. Como representante del grupo se encuentra el Dr. Javier Maixé Altés, profesor titular de universidad. 1.3. Antecedentes Desde sus orígenes, la industria del automóvil ha ido incorporando nuevos elementos y sistemas a sus vehículos para satisfacer las crecientes demandas de los consumidores en aspectos de seguridad, confort, prestaciones, etc.. Estas demandas, sumadas a los esfuerzos de las empresas por adelantarse a la competencia, han conllevado un gran aumento del número de elementos eléctricos y electrónicos presentes en los automóviles.
Hasta finales de los años 50 del siglo XX, este incremento se realizó de forma progresiva ya que el número de dichos sistemas no era especialmente elevado. Durante esas décadas el bus de alimentación eléctrico de los automóviles se basaba en una batería de 6 V y un alternador para cargarla.
Sin embargo, llegó un punto en que dicho sistema dejó de ser suficiente para dar alimentación a los nuevos equipos de seguridad y confort y en 1955 comenzó el cambio al nuevo estándar de 14 V (batería de 12 V y alternador de 14 V). Éste ha sido, y sigue siendo, el estándar desde entonces y ha proporcionado alimentación a los cada vez más sofisticados equipos, sobre todo desde que se introdujo la electrónica en los automóviles, lo que supuso una auténtica revolución en la industria al ofrecer niveles de seguridad, confort y prestaciones inimaginables unas décadas atrás.
No obstante, al igual que sucedió con su antecesor, el estándar de 14 V ha llegado prácticamente a su límite en lo que a capacidad, costes y eficiencia se refiere. El causante, una vez más, es el aumento en el consumo eléctrico debido a la introducción de nuevos y mejores sistemas electrónicos que ofrecen nuevas prestaciones y a la sustitución de elementos mecánicos por electromecánicos que ofrecen ventajas. El por qué estas causas hacen que el sistema de 14 V llegue a su límite viene dado por diversos factores, entre los cuales destacan:
- Aumento de la sección de los cables eléctricos.
- Incremento del peso de los cables eléctricos.
- Mayor dificultad en el trazado del cableado.

MEMORIA DESCRIPTIVA
2
- Mayor consumo de combustible debido a dicho aumento de peso y en consecuencia más emisiones de gases contaminantes a la atmósfera.
- Dificultades tecnológicas para producir alternadores de 14 V que generen tanta
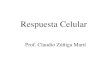
energía como se demanda. Así pues, para afrontar esta nueva situación, la industria del automóvil ha planteado diversas alternativas, entre las cuales destaca la sustitución del actual sistema de alimentación de 14 V por otro de 42 V (empleando batería de 36 V). A este sistema se le conoce como 42 V Powernet. Por otro lado, el hecho de que cada vez haya más elementos que deban ser controlados y monitorizados, bien por parte del usuario, bien por parte de los sistemas de control automáticos, ha supuesto también un notable incremento del cableado de control, sobre todo desde principios de los años 70 del siglo pasado. Ello implica, igual que antes, una serie de inconvenientes. Para dar solución a este nuevo problema, desde hace ya más de una década se sustituye gran parte del cableado de control punto a punto por sistemas de control basados en comunicaciones digitales, que aportan mucha más flexibilidad y un gran ahorro en cables. 1.3.1. Sistema eléctrico 42 V Powernet Como ya se ha comentado, el consumo eléctrico en los automóviles ha ido incrementándose a lo largo de los años, pero es a partir de los años 70 del siglo pasado cuando este aumento se hace más elevado, siendo desde entonces de entre el 4 y el 6% anual. Sin embargo, las previsiones auguran que dichos porcentajes serán superados en los próximos años, como se muestra en la siguiente figura.
Consumo eléctrico medio y previsiones
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
5500
6000
1990 1995 2000 2005 2010
Años
Dem
and
a d
e p
ote
cia
med
ia [
W]
Gama baja Gama media Gama alta
Figura 1.1. Potencia eléctrica demandada en los automóviles y estimaciones para los próximos años.
Límite de la tecnología actual de 14 V
Límite de la tecnología avanzada de 14 V

MEMORIA DESCRIPTIVA
3
Los impulsores de este crecimiento son lógicamente todos aquellos sistemas eléctricos y electrónicos que se han ido incorporando a los vehículos en aras de obtener una mayor seguridad y confort en la conducción, niveles superiores de comodidad y entretenimiento en el habitáculo, reducción de consumo de combustible y emisiones contaminantes, reducción de costes de fabricación, etc. A modo de ejemplo, veamos algunas de las cargas eléctricas que se espera tener hacia el año 2010:
Potencia Media [W] Carga Pico de
potencia [W] Verano Invierno
Electromechanical Engine Valve Actuator
Actuador de las válvulas electromecánicas 3200 1000
Electric Engine Coolant Pump
Bomba eléctrica de refrigeración del motor 500 400 80
Electrodrive Engine Cooling Fans
Ventiladores eléctricos de refrigeración del motor 800 500 100
Electric Assist Power Steering
Dirección asistida eléctricamente 1000 100
Heated Glass (Front and Side)
Cristal térmico (delantero y lateral) 2500 - 500
Electrically Heated/Cooled Seats
Asientos calefactados y refrigerados 500 300 400
Electrically Heated Steering Wheel
Volante calefactado 100 - 100
Electrically Heated Catalytic Converter
Convertidor catalítico calentado eléctricamente 3000 60 120
Electric Active Suspensión (4 wheels)
Suspensión activa eléctrica (4 ruedas) 12000 360
AC Powerpoint
Toma de corriente AC 2000 600
Comm/Nav/Entertainment
Comunicaciones/Navegación/Entretenimiento 100 100
x-by-wire (steer by wire, brake by wire, etc.,)
Mandos electrónicos (volante electrónico, freno electrónico, etc.)
- -
Ride control
Control de conducción - -
TOTAL > 3420 > 3460
Tabla 1.1. Potencia de algunas cargas presentes hacia el año 2010.

MEMORIA DESCRIPTIVA
4
Como se indica en la figura 1.1 la actual tecnología de 14 V está llegando a su límite de potencia para las demandas de hoy en día. Esto es debido, sobre todo, a que la tecnología, por el momento, no permite construir alternadores de potencia superior a 3 kW con rendimientos aceptables (son inferiores al 70%). Además, como también se observa en dicha figura, se espera que las nuevas tecnologías para el sistema de 14 V tampoco sean suficientes para dar satisfacción a la creciente demanda de energía eléctrica. Por otra parte, aparece otro problema derivado de este aumento en el consumo eléctrico: el aumento de la corriente. En efecto, a mayor potencia, si se mantiene la tensión constante, la corriente debe aumentar. Aplicando simplemente la ley de Ohm y el efecto Joule se deduce que a mayor corriente mayor debe ser la sección de los cables. Y ello implica lo ya comentado: aumento del peso, más dificultad en la distribución del cableado, mayor coste, incremento del consumo de combustible, etc. La siguiente figura pretende únicamente dar una idea gráfica de lo que se consigue aumentando la tensión de alimentación, en lo que a la corriente y sección se refiere. Se basa en la gráfica 1.1 para la gama media.
Figura 1.2. Corriente y sección del cableado para 14 V y 42 V en función de las previsiones de potencia para gama
media de la figura 1.1.
El aumento en el peso del cableado, debido a la sección, choca frontalmente con las normativas y leyes anticontaminación que son cada vez más exigentes y limitan las emisiones de los gases derivados de la combustión en el motor del vehículo. También establecen unos niveles de consumo de combustible que no deben ser superados. Así pues, está claro que el sistema de 14 V no es capaz de cumplir con los tres requisitos indispensables para un adecuado sistema de alimentación eléctrico en el automóvil:
- Debe realizar una transformación óptima de la energía mecánica en eléctrica. Ello implica un elevado rendimiento del alternador.
Corriente
0255075
100125150175200225250275300
1990 1995 2000 2005 2010
Año
Cor
rien
te [
A]
Corriente a 14V Corriente a 42 V
Sección cableado
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
1990 1995 2000 2005 2010Año
Sec
ció
n [
mm
2]
Sección a 14 V Sección a 42 V

MEMORIA DESCRIPTIVA
5
- La distribución de la energía eléctrica debe realizarse con las mínimas pérdidas posibles. Si se intenta reducir la sección de los cables, la única solución es disminuir la corriente.
- Los servicios que requieren alimentación, es decir, las cargas, deben tener un buen
rendimiento. Ante la problemática surgida a raíz de todas estas cuestiones, Mercedes-Benz (actualmente Daimler-Chrysler) solicitó al MIT (Massachusetts Institute of Technology) que organizara un grupo de trabajo entre empresas automovilísticas y suministradores para hallar una solución viable y estándar para el sector. Así se formó el MIT Working Group, que estaba compuesto inicialmente por siete empresas. De sus reuniones se derivaron una serie de recomendaciones, que se basaban en emplear una tensión de alimentación de 42 V y una batería de 36 V de plomo-ácido. Poco después, también Mercedes-Benz, organizó un encuentro similar entre las empresas automovilísticas alemanas, que adoptaron las recomendaciones anteriormente realizadas en el MIT. Este grupo alemán se ha expandido a todas las empresas europeas del sector y a muchos de sus suministradores y se conoce como Forum Bordnetz. Su trabajo está gestionado por una empresa denominada SICAN y ésta ha asumido las responsabilidades de refinar las recomendaciones y convertirlas en estándares ISO. Actualmente el grupo del MIT se conoce como MIT/Industry Consortium on Advanced Automotive Electrical/Electronic Components and Systems y está compuesto por 34 compañías, incluidas 10 japonesas. Esto hace que el sistema 42 V Powernet tenga aceptación mundial y pueda llegar a convertirse en el sistema de alimentación del futuro en los automóviles. 1.3.1.1. ¿Por qué 42 V? La elección de esta tensión no es en absoluto arbitraria, sino que es consecuencia de un profundo estudio. En efecto, en primer lugar, se debe tener en cuenta unos límites de seguridad para las personas, que están recomendados por el Global Standard Setting Bodies, y que establecen que la máxima tensión en continua en el automóvil, incluyendo sobrepicos transitorios, debe ser de 60 V. Las características de tensión de este sistema de alimentación se muestran en la siguiente figura:
Figura 1.3. Niveles de tensión en el sistema eléctrico de 42 V y especificaciones para los semiconductores.

MEMORIA DESCRIPTIVA
6
Podemos apreciar que en todo el margen no se sobrepasa el nivel de seguridad antes comentado. Algunos de los beneficios que aporta este sistema de alimentación son:
- Mejora del rendimiento del combustible y reducción de las emisiones contaminantes gracias a la introducción de las válvulas electromecánicas, el ISG (Integrated Starter Generador, Arrancador Alternador Integrado), la posibilidad de arranque estático del motor y el uso del calentador eléctrico para el convertidor catalítico. El rendimiento del alternador también es superior.
- Reducción del peso (entre 6 y 12 kg) y tamaño del cableado (y su coste y
complejidad de ubicación en el vehículo), ya que, para una misma potencia, se reduce la corriente hasta una tercera parte aproximadamente, permitiendo una menor sección de los cables, como indica la figura 1.2. Igualmente se facilita la distribución del cableado.
- Menor coste de los semiconductores de potencia. Al reducir las corrientes en una
tercera parte, se ocupa un 20% menos de superficie semiconductora.
- Permite la alimentación de nuevos sistemas como el frenado eléctrico (Brake by Wire) que elimina componentes hidráulicos pesados y sustancias químicas peligrosas. También es el caso de la dirección asistida eléctrica (Electric Assist Power Steering) que facilita la maniobrabilidad del vehículo y reduce el peso respecto al sistema actual con el consiguiente ahorro de combustible. Igualmente se tendría la suspensión activa, ignición electromagnética, etc.
La siguiente tabla muestra algunas de las tecnologías actuales que más se beneficiarían de un sistema a 42 V:
Tecnología Beneficios
Dirección asistida eléctrica. Más potencia. Mejor economía de combustible.
Frenos eléctricos. Fuentes de alimentación redundantes.
Elevalunas eléctricos, asientos con reglaje eléctrico, etc.
Reduce tamaño y masa de los motores. Operación más eficiente.
Convertidor catalítico calefactado. Menores emisiones. Apagado del convertidor más rápido.
Ventiladores y compresores de aire acondicionado. Mayor eficiencia. Menores tamaños.
Sistemas multimedia y telefonía. Más potencia para vídeo, teléfonos móviles, sistemas de navegación, amplificadores de audio, etc.
Bombas de agua. Mejora en la eficiencia y mayor vida de servicio.
Sistemas de gestión y control del motor de combustión interna. Reducción del tamaño y masa. Mayores prestaciones.
Bombas de combustible. Menor tamaño y masa.
Asientos calefactados. Calentamiento más rápido. Operación más eficiente. Mayor potencia.
Tabla 1.2. Tecnologías actuales beneficiadas del uso de 42 V Powernet.

MEMORIA DESCRIPTIVA
7
1.3.2. Sistema eléctrico Dual Voltage 14 V/42 V Si bien el sistema de 42 V ofrece toda una serie de ventajas que hacen de su uso un objetivo importante para los fabricantes de automóviles, es muy improbable que el sistema de 14 V y toda la tecnología desarrollada entorno a él desaparezcan de golpe. En efecto, pasar del bus de 14 V al bus de 42 V directamente supondría unos costes de transición demasiado elevados, ya que se deberían rediseñar todos los productos y procesos de producción, y habría que adecuar algunas normativas, como las de EMC (Compatibilidad ElectroMagnética). Además, inicialmente los elementos destinados exclusivamente al nuevo estándar de 42 V se producirían en un volumen relativamente bajo, con los costes que ello supone. En definitiva, desde el punto de vista técnico y, sobre todo, económico no es viable pasar directamente de un estándar a otro. Por ello, la solución que parece más adecuada es tener inicialmente un sistema de alimentación dual, en la que coexisten ambos buses de 14 V y 42 V. Es lo que se conoce como Dual Voltage 14 V/ 42 V. Ésta debe ser únicamente una etapa intermedia lo más breve posible, hasta que la tecnología de 42 V sea completamente fiable y viable económicamente y pueda así tenerse un sistema “puro” de 42 V. Se puede representar gráficamente el camino que sufrirá previsiblemente la tecnología de 42 V hasta su implantación total:
Figura 1.4. Evolución de la tecnología de 42 V hasta tener un sistema “puro” de 42 V. En este sistema dual, las cargas que se beneficien de la alimentación a 42 V, principalmente las de elevada potencia, se conectarán a dicho bus, mientras que el resto se mantendrán en el bus de 14 V. Es decir, tendremos una distribución de las cargas entre los dos buses de alimentación.

MEMORIA DESCRIPTIVA
8
Así pues, las principales ventajas que aporta el sistema Dual Voltage 14 V/42 V son principalmente:
- Posibilita la implementación de funciones que no pueden ser logradas sólo con el bus de 14 V.
- Mejora el rendimiento de determinadas cargas, como los motores de continua, al ser alimentados a mayor tensión, y reduce la sección del cableado de alta tensión.
- Mantiene los 14 V para aquellos componentes que se benefician de un bajo voltaje.
- Impone un menor esfuerzo de rediseño que adecuar todo el sistema a los 42 V.
- Reduce el impacto en la industria de componentes electrónicos. 1.3.3. Comunicaciones digitales en el vehículo Hasta hace relativamente pocos años, las comunicaciones en el vehículo entre dispositivos simples, tales como interruptores y actuadores, se conseguían mediante cableado punto a punto. Esto daba como resultado entramados de cables pesados, voluminosos, caros y complejos, que resultaban difíciles de manejar e instalar. Aún así, era la forma que se empleaba para interconectar entre sí los diversos elementos eléctricos/electrónicos. Sin embargo, con la expansión del número de dispositivos de este tipo presentes en los automóviles, la cantidad de cables aumentó hasta llegar a un punto en que el volumen, fiabilidad, peso y coste se convirtieron en un verdadero problema para los fabricantes. Los principales inconvenientes que se asocian a esta gran cantidad de cables son:
- Reducción del espacio disponible para el trazado. - Dificultad de manufactura y ensamblaje.
- Deterioro de la fiabilidad (la primera causa de fallos en el sistema
eléctrico/electrónico del automóvil se encuentra en el cableado).
- La relación coste/beneficio no mejora al añadir nuevas funcionalidades debido al coste del cableado extra.
- El énfasis creciente en la eficiencia del combustible y prestaciones del vehículo
(aceleración, deceleración, etc.) requiere reducción de peso.
- Información de los sensores y otros dispositivos se distribuyen con poca eficiencia debido a la gran cantidad de canales de señal discretos.
- Los numerosos conectores llevan a una operación poco fiable, debido a que cada
enlace reduce el MTBF (Tiempo Medio Entre Fallos).

MEMORIA DESCRIPTIVA
9
Así pues, la necesidad de reducir la cantidad de cables y mejorar la distribución de las funciones de control y monitorización en el vehículo se hicieron obvias y en los años 80 del siglo pasado comenzaron a aparecer las primeras soluciones de interconexión mediante redes digitales. En estos sistemas de comunicación digitales los diferentes módulos conectados comparten una misma línea (bus de comunicación) por la que intercambian información (datos, señales de control, etc.) empleando un determinado protocolo. Además de consideraciones medioambientales, estas redes de comunicación deben cumplir ciertos requerimientos genéricos, entre los cuales están:
- Alta integridad: la probabilidad de un error no detectado debe ser negligible para el funcionamiento del vehículo.
- Determinismo acotado: debe garantizarse un umbral en el tiempo de latencia del
mensaje para controlar problemas.
- Cumplimiento de la normativa de EMC (Compatibilidad ElectroMagnética): debe ajustarse a los niveles de emisión radiada y absorción tolerada.
- Bajo número de interconexiones: cada conector adicional incrementa la probabilidad
de fallo.
- Conectores compactos: el conector es a menudo el componente más grande en un módulo electrónico del automóvil.
- Bajo coste: los costes son críticos. Ahorrarse unos céntimos en un componente puede
suponer elevadas sumas en grandes volúmenes de producción.
- Ajustes en la red: las variaciones en los modelos y funciones extras de la red durante la producción requieren que sea fácilmente expandible y modificable.
- Tolerante a fallos: las comunicaciones deben restablecerse cuando se eliminan fallos
y la redundancia es importante. La SAE (Society of Automotive Engineers) establece una clasificación para los protocolos de comunicación en el entorno del automóvil, basado en la velocidad de transmisión de los mismos, como indica la siguiente tabla.

MEMORIA DESCRIPTIVA
10
Clase Velocidad transmisión Aplicación
A < 10 kbit/s Transmisión de señales de activación poco frecuente (activación humana)
B 10 – 100 kbit/s
Transmisión de información de control en tiempo real no estricto. Aplicaciones no críticas. Presentación de datos al conductor, comunicación entre equipos electrónicos (aire acondicionado, audio, retrovisores, diagnosis, etc.)
C 100 kbit/s – 1 Mbit/s Transmisión de información en tiempo real estricto. Aplicaciones de seguridad crítica (ABS, ASR, ESP, etc.)
D > 1 Mbit/s Aplicaciones multimedia (Internet, televisión, etc.) y funciones críticas en tiempo real (X by wire).
Tabla 1.3. Clasificación SAE de los protocolos de comunicación en el automóvil.
Existe una gran variedad de redes digitales para el automóvil, unas desarrolladas por fabricantes de automóviles y otras por empresas suministradoras o sociedades internacionales. Algunas de estas redes son abiertas, es decir, pueden ser empleadas por cualquiera y otras son propietarias y sólo pueden usarse con licencia. En un mismo vehículo puede haber diversos buses de comunicaciones, cada uno de los cuales destinado a unas funciones, según sus características. La siguiente figura muestra una posible configuración:
Figura 1.5. Red de comunicaciones en un automóvil.

MEMORIA DESCRIPTIVA
11
1.3.4. Problemática de los cortocircuitos Uno de los principales problemas que existen en cualquier sistema de alimentación eléctrico es la aparición de cortocircuitos. Sabemos que un cortocircuito genera unas corrientes muy elevadas que pueden destruir los dispositivos eléctricos y electrónicos al producir un drástico aumento de la temperatura. Por ese mismo efecto el aislante que recubre los conductores puede llegar a fundirse y en última instancia puede generarse un incendio. Además, las baterías también sufren procesos de descarga muy bruscos que pueden generar evaporación (gasificación) de la solución electrolítica pudiendo dañar la batería e incluso romperla, con el consiguiente escape de productos químicos nocivos. El sistema eléctrico del automóvil no está exento de este riesgo y en caso de cortocircuito se debe evitar a toda costa la destrucción de los componentes eléctricos/electrónicos, la batería y, sobre todo, la posibilidad de producirse un incendio que ponga en peligro la integridad física de los ocupantes del vehículo. Hoy en día, al haber sólo una tensión de alimentación, únicamente puede producirse un tipo de cortocircuito: entre 14 V y masa (GND). Para protegerse de ello, los automóviles disponen de una arquitectura en árbol compuesta por fusibles y otros elementos, que se hallan en diferentes lugares del sistema de alimentación eléctrico. Sin embargo, si bien este sistema es válido en la actualidad, el hecho de incorporar una nueva tensión de alimentación hace que aparezcan nuevas situaciones de riesgo. En efecto, en una arquitectura Dual Voltage 14V /42 V existen tres tipos de cortocircuitos: 14 V – GND, 42 V – GND y 14 V - 42 V como puede apreciarse a continuación:
Figura 1.6. Lugares donde puede aparecer cortocircuito en una arquitectura Dual Voltage 14 V/42 V. El cortocircuito más preocupante es el que se produce entre ambas tensiones de alimentación ya que, durante un tiempo, las cargas de 14 V se están alimentando a una tensión superior a la nominal. Además, la batería de 12 V también sufre por estar conectada a una tensión más elevada que la de diseño.

MEMORIA DESCRIPTIVA
12
1.4. Posibles soluciones y solución adoptada Como ya se mencionó con anterioridad, el objetivo del proyecto es diseñar e implementar un sistema que realice la detección y gestión de cortocircuitos en una arquitectura Dual Voltage 14 V/42 V, empleando un protocolo de comunicaciones para interconectar sus diversos elementos integrantes. Profundizando más, se pretende que este sistema evite la rotura de los fusibles principales al producirse cualquier tipo de cortocircuito, con lo que se podría así eliminar, desde el punto de vista puramente técnico, la necesidad de emplear dichos fusibles. 1.4.1. Arquitectura Dual Voltage 14 V/42 V Existen varias alternativas para implementar el sistema de alimentación Dual Voltage 14 V/42 V, teniendo todas ellas elementos en común. Por ejemplo, todas disponen de cajas de cargas, es decir, módulos donde llegan los buses de alimentación (42 V y 14 V), además de masa, y donde se conectan las cargas. También disponen de un sistema de comunicaciones. Las tres arquitecturas más interesantes son las presentadas a continuación. 1.4.1.1. Alternador de 42 V, batería de 36 V y convertidor DC/DC 42 V/14 V Esta arquitectura se basa en el ahorro de costes, peso y disminución de problemas derivados del empleo de una segunda batería. La siguiente figura muestra el esquema básico:
Figura 1.7. Arquitectura Dual Voltage con alternador de 42 V, batería de 36 V y DC/DC 42 V/14 V. La salida del alternador, que incluye rectificación, proporciona una tensión continua de 42 V. A ésta se conecta el sistema de arranque del motor de explosión, la batería de 36 V, las cargas a 42 V y un convertidor DC/DC que facilita la tensión para las cargas alimentadas a 14 V. También podemos apreciar una red de comunicaciones compuesta por varios nodos que, si bien no forma parte del sistema de alimentación en sí, proporciona un medio para llevar

MEMORIA DESCRIPTIVA
13
a cabo funciones como la monitorización de la batería, gestión de las cargas, etc., para poder realizar una gestión eficiente de la energía eléctrica. Precisamente, la principal exigencia de esta arquitectura es que dicha gestión sea lo suficientemente “inteligente” para evitar que la batería de 36 V llegue a descargarse por debajo de un nivel que impida arrancar el vehículo en cualquier circunstancia. Ello podría producirse debido a unas cargas (key-off loads) que están siempre conectadas, incluso cuando el vehículo está totalmente apagado (parado y sin equipos conectados por el usuario). Por otro lado, la no inclusión de una batería de 12 V comporta las siguientes consecuencias:
- El convertidor DC/DC 42 V/14 V debe implementarse mediante convertidores redundantes en paralelo para cumplir los requerimientos de seguridad. Es decir, si falla el convertidor, el bus de 14 V no puede quedarse sin alimentación.
- Los convertidores de alta potencia disminuyen drásticamente su eficiencia cuando
operan a bajas corrientes. Debido a ello es necesario añadir un convertidor DC/DC 42 V/14 V de baja corriente para proporcionar las corrientes de modo de espera (stand-by currents) al bus de 14 V y evitar así la descarga de la batería de 36 V. Además, el convertidor debe tener un rendimiento adecuado para minimizar dicha descarga, lo que excluye a los reguladores lineales baratos.
- El convertidor debería ser capaz de suministrar corrientes tanto continuas como
pulsantes, lo que aumenta notablemente su coste. 1.4.1.2. Alternador de 42 V, baterías de 36 y 12 V y convertidor DC/DC 42 V/14 V Esta arquitectura es la considerada como más interesante para su implementación real en los automóviles por el Forum Bordnetz. La siguiente figura muestra su esquema básico:
Figura 1.8. Arquitectura Dual Voltage con alternador de 42 V, baterías de 36 V y 12 V y DC/DC 42 V/14 V.

MEMORIA DESCRIPTIVA
14
Como puede apreciarse, la única diferencia con la anterior arquitectura es el añadido de una batería de 12 V al bus de 14 V, lo que aporta una serie de ventajas:
- Las cargas de tipo key-off pueden ser aisladas completamente de la batería de puesta en marcha del vehículo (la de 36 V) conectándolas a la batería de 12 V. Con ello se reduce considerablemente la posibilidad de que la primera sufra una descarga excesiva, lo que comprometería el arranque del vehículo.
- Si el convertidor DC/DC es bidireccional se puede traspasar energía de la batería de
12 V a la de 36 V, de tal forma que puede realizarse una carga superficial de esta última en caso de que su energía no sea suficiente para poner en marcha el automóvil. Ello permite realizar la puesta en marcha auxiliar (jump start), siempre que la batería de 14 V disponga de un mínimo nivel de carga.
- Al disponer de una batería de 12 V es posible recibir ayuda externa para la puesta en
marcha auxiliar, de vehículos que sólo cuenten con el sistema eléctrico a 14 V.
- Otra ventaja de esta arquitectura es que, al haber dos baterías, éstas pueden suministrar los picos de corriente que demanden las cargas de sus respectivos buses, rebajando el coste del convertidor DC/DC.
Sin embargo, esta arquitectura también presenta desventajas. En efecto, la existencia de la segunda batería incrementa el coste y peso del vehículo, repercutiendo en un mayor consumo de combustible. También se requiere mayor mantenimiento. Además, las baterías contienen sustancias nocivas y difícilmente reciclables, aspecto que es muy importante. Igual que antes, el sistema de comunicaciones permite obtener información de los diferentes elementos y facilita así la gestión de la energía. 1.4.1.3. Alternador de dos salidas (14 V y 42 V) y baterías de 36 V y 12 V Esta arquitectura dispone de un alternador de doble estátor que suministra ambas tensiones de 14 V y 42 V a sendos buses y baterías como se muestra en la figura:
Figura 1.9. Arquitectura Dual Voltage con alternador de doble salida y dos baterías.

MEMORIA DESCRIPTIVA
15
Al igual que en las otras arquitecturas, las cargas de alta potencia, incluyendo el motor de arranque, están conectadas al bus de 42 V, estando los módulos de baja potencia en el bus de 14 V. La principal ventaja de esta arquitectura es que no se requiere un convertidor DC/DC que puede llegar a ser complejo, además de los beneficios que aporta el disponer de dos baterías. El principal inconveniente es la dificultad que presenta el control de las tensiones del alternador. Una posibilidad es utilizar control por flujo estándar para regular la tensión del bus de 42 V, y un rectificador controlado para la tensión del bus de 14 V. 1.4.1.4. Solución adoptada La arquitectura en que nos basaremos en el proyecto será como la del punto 1.4.1.2., es decir, alternador con salida simple a 42 V, dos baterías (36 V y 12 V) y un convertidor DC/DC 42 V/ 14V. Esta topología presenta varias posibilidades a la hora de realizar su montaje en el vehículo. Efectivamente, se puede optar por ubicar una de las baterías (normalmente la de 36 V, debido a la posición del alternador) en la zona del motor, mientras que la otra podría encontrarse en la parte trasera. Otra opción puede ser la de situar ambas baterías próximas entre sí, seguramente en la zona del motor. De estas dos posibles opciones el proyecto se basa en considerar la primera de ellas, es decir, separar las baterías, ya que ello aporta una serie de beneficios:
- En caso de colisión es difícil que ambas baterías resulten afectadas, lo que permitiría en principio, mantener la alimentación de algunas cargas, por ejemplo, las luces de emergencia y señalización, etc.
- Se facilita la distribución de pesos en el vehículo, lo que repercute en el
comportamiento del mismo, sobre todo en lo que a estabilidad se refiere.
- El compartimiento motor puede estar a unas temperaturas elevadas, lo que perjudica a las baterías ubicadas en él ya que produce gasificación de la solución electrolítica y puede llegar a ser peligroso.
- Aporta mayor flexibilidad a la hora de escoger la situación de las baterías, ya que
normalmente no se dispone de demasiado espacio para ello.

MEMORIA DESCRIPTIVA
16
1.4.2. Sistema de comunicaciones Hoy en día existen varios protocolos de comunicaciones propietarios, es decir, definidos por un fabricante en concreto para su propio uso. Ello implica la existencia en el mercado de productos que no pueden comunicarse entre sí, cuando deberían poder hacerlo. Por tanto, surge la necesidad de crear normas abiertas para que los diversos fabricantes utilicen los mismos protocolos y la comunicación entre sus respectivos módulos sea posible. Sin embargo, todavía no se ha conseguido que haya un protocolo estándar empleado por todos los fabricantes de automóviles, aunque algunos están más impuestos que otros. A continuación se realiza una breve descripción de algunos protocolos desarrollados para el automóvil. 1.4.2.1. CCD (Chrysler Collision Detection)
El protocolo CCD fue desarrollado en la década de 1980 por Chrysler. Utiliza un par trenzado como medio de transmisión y su codificación de bit es de tipo NRZ (Non Return to Zero). Como acceso al medio emplea el procedimiento CSMA/CA (Carrier Sense Multiple Access / Collision Avoidance) que permite el arbitraje en el acceso múltiple al bus, de forma que sólo el mensaje de más prioridad consigue ser trasmitido sin ser destruido por los nodos restantes que habían accedido al bus. Este tipo de acceso al medio permite que funcione sin necesidad de un controlador central de las comunicaciones. La velocidad de transmisión es de aproximadamente 7,8 kbit/s, siendo, por tanto, de clase A. Este protocolo se aplica en el multiplexado de diversos sensores del automóvil. 1.4.2.2. SAE J1850 Es el estándar SAE para las clases A y B (velocidad de transmisión baja y media). Es una combinación del SCP de Ford y del Protocolo Clase 2 de General Motors y fue aprobado por la SAE en 1988 y revisado finalmente en 1994. Existen dos versiones (al ser desarrollo de dos protocolos propietarios), cuya diferencia consiste en la codificación de bit y la velocidad de transmisión. La versión más lenta emplea una codificación VPM (Variable Pulse Modulation) alcanzando 10,4 kbit/s y transmite con un solo cable referido a masa. La versión más rápida usa una codificación PWM (Pulse Width Modulation) consiguiendo 41,6 kbit/s y transmite en modo diferencial con dos cables. Como acceso al medio emplea el procedimiento CSMA/CR (Carrier Sense Multiple Access / Collision Resolution), lo que significa que cualquier módulo puede intentar transmitir si detecta que el bus está desocupado. Si más de un módulo intenta transmitir al mismo tiempo, un proceso de arbitraje determinará cuál de ellos continuará transmitiendo y quién deberá reintentarlo después. La principal aportación de este protocolo fue la inclusión de las respuestas de los nodos destinatarios dentro de la propia trama emitida desde el nodo origen. En concreto permite: respuesta de un byte desde un simple destinatario, respuestas concatenadas de un byte desde múltiples destinatarios y respuesta de múltiples bytes desde un simple destinatario. La utilización en series comerciales empezó en el momento de su estandarización, siendo

MEMORIA DESCRIPTIVA
17
quizás el primer protocolo en ser aplicado de forma masiva y actualmente todavía está en uso. 1.4.2.3. J1939 Se trata de un protocolo de alta velocidad (clase C) para soportar funciones de control en lazo cerrado en tiempo real. Su documentación cubre todas las capas del modelo OSI, con lo que está totalmente definido. Es compatible con CAN 2.0B y emplea el formato de identificador extendido de 29 bits de éste. La velocidad de transmisión es de 250 kbit/s y el medio físico es un par trenzado apantallado. 1.4.2.4. VAN (Vehicle Area Network) Este protocolo fue desarrollado por el grupo francés Renault y PSA Peugeot-Citroën en 1988. Sin embargo, hasta 1990 no se presentó la primera versión VAN 1.0 y en 1994 la versión 2.0. La tecnología VAN está estandarizada según la especificación ISO 11519. Utiliza par trenzado como medio de transmisión, la codificación de bit es de tipo Manchester, lo que supone un menor aprovechamiento del ancho de banda. El acceso al medio se realiza por contienda en referencia al campo de dirección o identificador. La velocidad de transmisión es de hasta 1 Mbit/s. La principal aportación de este protocolo es el uso de un carácter especial de inicio de trama que le permite resincronizar el receptor a una precisión de un 1%, partiendo de una diferencia entre emisor y receptor de un 20%. Al igual que CAN, que veremos más adelante, también incluye un bit de reconocimiento dentro de la trama original, así como la posibilidad de encadenar una trama respuesta a continuación de la trama original, de forma parecida al J1850. VAN es utilizado en aplicaciones de control en el automóvil. 1.4.2.5. PALMNET (Protocol for Automotive Low and Medium speed NETwork) Protocolo desarrollado por Mazda en 1989 y puesto en práctica en un modelo de la misma marca en 1990. Utiliza par trenzado como medio de transmisión, la codificación de bit es de tipo NRZ. Con respecto a la capa de enlace, emplea la técnica CSMA/CD con arbitraje no destructivo. La velocidad de transmisión es de 24 kbit/s, lo que lo ubica en la clase B. La aportación más palpable de este protocolo es el procedimiento de confirmación multinodo al final de la trama y antes del carácter de fin de trama, denominado ANC (Acknowledgement for Network Control). Este método consiste en el envío al final de la trama, por parte de cada nodo conectado al bus, de una señal de reconocimiento (ACK) en una posición localizada de forma que se pueda interpretar por el nodo emisor. Este método limita el número máximo de nodos a 24. En 1994 Mazda realizó una mejora sustancial del protocolo PALMNET, que pasó a denominarse Advanced PALMNET (Protocol for Automotive Local area Multiplexing NETwork). Aunque este protocolo conserva parte del nombre de su antecesor, el significado del acrónimo cambió de acuerdo al aumento de velocidad. Advanced

MEMORIA DESCRIPTIVA
18
PALMNET especifica dos versiones: media-baja velocidad (hasta 125 kbit/s) y alta velocidad (hasta 1 Mbit/s). 1.4.2.6. CAN (Controller Area Network) El protocolo CAN fue desarrollado por Robert Bosch GmbH a principios de los años 80 del siglo pasado y es la referencia obligada de cualquier protocolo en el campo del automóvil, siendo el protocolo con más nodos implantados en este sector en Europa. Además, su aplicación se extiende al campo del control industrial. Existen dos versiones básicas de este protocolo: CAN 1.0 y CAN 2.0. El estándar CAN 1.0 es un protocolo que emplea par trenzado como medio de transmisión, la codificación de bit es del tipo NRZ con bit stuffing cada 5 bits para evitar la desincronización de bit (si hay 5 bits del mismo nivel, el siguiente se fuerza de nivel contrario y no cuenta como dato para la trama). El método empleado para el acceso al medio es el de contienda CSMA/CA y permite una velocidad de transmisión de hasta 125 kbit/s, lo que lo ubica en la clase B. Esta velocidad le permite realizar funciones de control. Este protocolo está orientado a un modelo de funcionamiento de tipo productor/consumidor, si bien pueden emplearse otros como el tipo maestro/esclavo múltiple. En el primer modo, un nodo puede enviar un mensaje al bus cuando unilateralmente lo decida. El mensaje es finalmente transmitido si gana la contienda entre los nodos candidatos a transmitir en el instante de acceso. Esta contienda se realiza en base al valor del campo identificador de la trama y requiere el uso de dos niveles de señalización asimétricos de bus, denominados nivel recesivo (reposo) y nivel dominante. El campo identificador (11 bits) de la trama es funcional indicando el contenido del campo de datos de la misma. Una característica importante de este protocolo es el reconocimiento de recepción (bit ACK) incluido en la propia trama (in frame response) útil cuando existe un único destinatario de la trama. También permite, incluida en la propia trama de envío, la petición de una respuesta de la estación destino (mediante el bit RTR). Finalmente, merece una cierta consideración el confinamiento local de errores en un nodo ante reiteradas detecciones de error, es decir, cuando un nodo detecta 255 veces error en su transmisión, se desconecta del bus. Este protocolo fue estandarizado con la denominación ISO 11519. En 1991 apareció CAN 2.0, una nueva versión del protocolo CAN que es compatible con el estándar CAN 1.0, cuya aportación consistió básicamente en aumentar el campo identificador de la trama de 11 bits a 29 bits, mediante la inclusión de un campo de identificación extendido de 18 bits. La velocidad se aumentó a 500 kbit/s al estandarizarse bajo SAE J2284-500 y a 1 Mbit/s bajo ISO 11898, lo que los ubica en la clase C. Además, existen tres implementaciones de la capa física del protocolo CAN estandarizadas. La norma ISO 11898-2 especifica la capa física del HS-CAN (High-Speed CAN, CAN de Alta Velocidad), la ISO 11898-3 hace lo propio con el FT-CAN (Fault-Tolerant CAN, CAN Tolerante a Fallos) y la SAE/J2411 estandariza la SW-CAN (Single-Wire CAN, CAN UniFilar).

MEMORIA DESCRIPTIVA
19
1.4.2.7. TTP (Time Triggered Protocol) El protocolo TTP fue desarrollado por la Universidad de Viena y Daimler-Benz Research para aplicaciones en tiempo real y cubrir las carencias de los protocolos de comunicación desarrollados hasta ese entonces. TTP es un protocolo activado por tiempo que proporciona:
- Coordinación de conjunto (membership service). Esto significa que cada nodo sabe el estado actual de cualquier otro nodo que compone el sistema distribuido.
- Servicio de sincronización de reloj tolerante a fallos (global time-base). Cada nodo
dispone de un reloj interno, actualizado por una trama de resincronización enviada con cierta frecuencia por un nodo.
- Soporta cambios de modos de operación. Las aplicaciones en tiempo real tienen
diferentes modos de operación: inicialización, normal, emergencia, etc. El protocolo de comunicaciones debe soportar cambios rápidos de un modo a otro de manera consistente en todos los nodos.
- Gestión de redundancia distribuida.
- Detección de error con pequeña latencia.
- Acceso al medio con el método TDMA (Time-Division Multiple Access) basada en
una planificación temporal de los mensajes.
- Codificación de bit del tipo MFM (Modified Frequency Modulation).
- Velocidad de transmisión superior a 10 Mbit/s, con lo que es de clase D. Las anteriores características hacen que este protocolo pueda utilizarse en cualquier aplicación crítica de tiempo real en automóvil. De este protocolo se han realizado diversas versiones, cubriendo todas las clases SAE (A, B y C). La velocidad del bus TTP/C, se especificó en 1 Mbit/s, si bien posteriormente aparecieron versiones de velocidad superior. Actualmente está en 25 Mbit/s. 1.4.2.8. TTCAN (Time Triggered Controller Area Network) TTCAN es una extensión del protocolo CAN estandarizada por la norma ISO 11898-4 que permite emplear CAN para mensajes disparados por tiempo (Time Triggered), lo que aumenta el determinismo, fiabilidad, componibilidad y sincronización sobre el bus CAN. El porqué de TTCAN se debe a que en CAN, debido al proceso de arbitraje, el envío de un mensaje puede retrasarse si hay otro en proceso de envío o si algún mensaje de mayor prioridad también compite por el control del bus. Incluso los mensajes de mayor prioridad pueden sufrir una pequeña latencia. En TTCAN un nodo específico (Time Master) transmite un mensaje de referencia indicando el inicio de un ciclo de tiempo. El mensaje es reconocido por el resto de nodos

MEMORIA DESCRIPTIVA
20
gracias a su identificador y se sincronizan con él, proporcionando así un punto de referencia temporal para la planificación de la transacción de mensajes. Este mensaje puede ser enviado periódicamente (en modo TT o Time Triggered) o al ocurrir en evento externo (en modo ET o Event Triggered). Cada ciclo de tiempo se divide en porciones (slots) que son asignadas a un nodo o conjunto de nodos, o simplemente se dejan como tiempo muerto. Entonces, la transmisión de un mensaje por parte de un nodo comienza al inicio del correspondiente slot. El protocolo debe asegurarse un comportamiento tolerante a fallos por parte del nodo maestro que envía el mensaje de referencia. Por ello, si éste falla, otro nodo lo reemplaza. TTCAN dispone de dos niveles de sincronización, nivel 1 y nivel 2. El primero garantiza la operación TT de CAN basada en el mensaje de referencia del Master, incluyendo la redundancia de éste. El segundo nivel establece una base de tiempos sincronizada global y se realiza una corrección continua de la desviación entre los controladores de CAN. La velocidad máxima de transmisión es 1 Mbit/s, estando ésta limitada por el acceso CSMA/CD. El número máximo de bytes de datos en la trama es de 8. 1.4.2.9. LIN (Local Interconnect Network) Protocolo presentado el año 2000 en el congreso SAE de Detroit. LIN fue creado para ser un protocolo de bajo coste, usado en distancias cortas y a bajas velocidades de transmisión. Se diseñó para realizar funciones de clase A como control de las puertas, aire acondicionado, limpiaparabrisas, techo solar, etc. Algunas de las características más interesantes de LIN son:
- Es un protocolo de comunicaciones serie de un solo cable (single-wire), cuya trama está orientada a carácter, de forma que el protocolo se puede implementar basándose en un microcontrolador dotado de una UART.
- El medio de acceso está controlado por un nodo maestro, de manera que se evita la
colisión de mensajes y se garantiza una latencia para la transmisión de una señal.
- Una característica particular es su mecanismo de sincronización que permite la resincronización del reloj de comunicación para la determinación del periodo de bit, sin utilizar un cuarzo o resonador cerámico.
- La máxima velocidad de transmisión es de 20 kbit/s, siendo de clase B.
- Es posible añadir nodos a la red LIN sin requerirse cambios en el software o
hardware. El tamaño de una red típica LIN es de 12 nodos. La sincronización del reloj, la sencillez de la comunicación UART y el acceso al medio de un solo cable son los factores principales de la buena relación coste-eficiencia del protocolo LIN.

MEMORIA DESCRIPTIVA
21
1.4.2.10. Volcano Volcano es un protocolo usado por Volvo y puede definirse como “TTP sobre CAN” ya que está basado en CAN y es determinista, pero no es TTCAN. De acuerdo con el Volcano Communications Concept (Concepto de Comunicaciones Volcano), este protocolo surge como una técnica en la que se integra CAN de tal forma que se garantiza la latencia de los mensajes. Esto se consigue especificando la latencia y periodicidad de los mensajes durante la fase de diseño. Ello permite calcular las máximas latencias de tal forma que el diseñador puede especificar la configuración de la red de tal forma que se garantice ciertos parámetros específicos evitando el arbitraje tanto como sea posible. Esto parece implicar que el envío de mensajes es TT en vez de ET, de ahí la definición de “TTP sobre CAN”. En principio este método implica que las cargas al bus CAN pueden ser mayores que empleándolo convencionalmente. 1.4.2.11. ByteFlight o SI-bus En octubre de 1999 BMW dio a conocer el protocolo ByteFlight, también conocido como SI-bus. Fue desarrollado con el objetivo de satisfacer las necesidades de las aplicaciones de seguridad crítica: determinismo, tolerancia a fallos y alta velocidad de transmisión. Como acceso al medio emplea el método denominado FTDMA (Flexible Time-División Multiple Access), consistente en una distribución cíclica de bus, dividida en dos partes. La primera dedicada a mensajes de alta prioridad, con una planificación de tipo TT mientras que la segunda se reserva a mensajes de tipo ET, los cuales se consideran de menor prioridad. Según algunos autores, este protocolo tiene, como principal cualidad la unión de las ventajas de los métodos síncronos y asíncronos, garantizando unas latencias deterministas para los mensajes de alta prioridad y un uso flexible del ancho de banda para mensajes de baja prioridad. Para reducir las EMIs (Electromagnetic Interferentes, Interferencias ElectroMagnéticas) utiliza fibra óptica como medio de transmisión. La velocidad de transmisión es de 10 Mbit/s. 1.4.2.12. FlexRay El protocolo FlexRay fue desarrollado por el consorcio FlexRay (BMW, Daimler-Chrysler, Motorola, Philips, GM y Bosch). Es un protocolo tolerante a fallos diseñado para transmisiones de alta velocidad y aplicaciones de control avanzado, como los sistemas por cable “X-by-wire”. Las principales características de este protocolo son:
- Soporta los dos paradigmas: comunicación determinista (planificación estática TT) y comunicación dinámica conducida por eventos ET.
- Sincronización de reloj tolerante a fallos a través de una base de tiempo global
(global time base).

MEMORIA DESCRIPTIVA
22
- Acceso al bus libre de colisiones.
- Latencia de mensajes garantizada.
- Mensajes orientados al direccionamiento vía identificadores.
- Velocidad de transmisión de hasta 10 Mbit/s. 1.4.2.13. DC-BUS En diciembre del año 2000 se constituyó la conocida como DC-bus Alliance (Audi, BMW, PSA, Infineon Technologies y YAMAR Electronics), con objeto de desarrollar un sistema de comunicación que empleara como canal de comunicación la red de alimentación de 14 V ó 42 V futura, basado en la tecnología patentada de YAMAR Electronics. Con ello se pretendía reducir los costes y simplificar el cableado de los sistemas del vehículo Esta alianza pretende crear un nuevo estándar internacional y abierto que sea compatible con los protocolos empleados hoy en día en los automóviles y que funcione tanto con el actual sistema de 14 V como con el de 42 V que se espera implementar en un futuro próximo. Este sistema utiliza actualmente los protocolos CAN y LIN y tiene una velocidad de transmisión de 10 kbit/s (aplicaciones de mecatrónica), 250 kbit/s (aplicaciones de telemática) y 1,7 Mbit/s (aplicaciones de multimedia). Los beneficios de DC-BUS son:
- Ahorro de coste y peso del cableado ordinario. - Arquitectura y modificaciones flexibles.
- Simplicidad de instalación.
- Elevada velocidad de las comunicaciones.
1.4.2.14. Solución adoptada Como se indica en el título del proyecto, se pretende realizar la gestión de cortocircuitos empleando CAN como protocolo de comunicaciones. Éste es ampliamente utilizado por la industria automovilística y, además, es abierto, lo que implica que existen multitud de empresas que fabrican dispositivos electrónicos que son compatibles con el estándar de CAN. Ello facilita y abarata mucho la adquisición de los componentes necesarios para implementar una red de comunicaciones basada en este protocolo. Además, dada la estrategia que se empleará en el sistema de gestión que se va a diseñar, el hecho de que CAN no sea determinista en el tiempo no supone un inconveniente importante.

MEMORIA DESCRIPTIVA
23
1.4.3. Interruptores Para poder llevar a cabo la estrategia de gestión de cortocircuitos, es necesario disponer de interruptores de potencia controlados mediante señales eléctricas. Hasta hace relativamente pocos años, prácticamente todos los interruptores de este tipo empleados en los automóviles eran relés electromecánicos. Sin embargo, desde hace algún tiempo se están empezando a sustituir dicho relés por dispositivos electrónicos, que permiten unas mejores prestaciones. Además, los fabricantes de semiconductores se están adaptando también al estándar de 42 V, diseñando dispositivos adecuados a este nivel de tensión. 1.4.3.1. Solución adoptada Se utilizarán interruptores electrónicos del tipo PROFET. En concreto, se trata de SMART-FET (interruptores inteligentes de tipo FET) que, a parte de realizar las funciones de conmutación, incorporan una serie de características muy interesantes. Algunas de ellas son: protección contra cortocircuitos, limitación de corriente, protección contra sobrecargas, sensado de corriente, control compatible con señales digitales CMOS, etc. Los dispositivos que serán empleados son concretamente: BTS 640 S2 para la línea de 14 V y BTS 660P para la línea de 42 V, ambos del fabricante Infineon. 1.4.4. Sistema de control del proceso Muchos sistemas de control modernos se basan principalmente en el uso de microcontroladores (µC). Ello se debe a las grandes ventajas que nos ofrecen respecto a los sistemas de control, bien sean analógicos o digitales, implementados con componentes electrónicos discretos:
- Reducción de tamaño y coste: el elevado grado de integración de un microcontrolador, que incluye microprocesador y periféricos diversos en un mismo circuito integrado, le permite una elevada funcionalidad por área a bajo coste y reduce considerablemente el tamaño del circuito impreso y, consecuentemente, su precio.
- Elevada flexibilidad: un mismo microcontrolador puede ser utilizado para un elevado
número de aplicaciones, variando únicamente su programa y, si es necesario, el hardware asociado a la aplicación.
- Aumento de la fiabilidad: la reducción de componentes en el circuito impreso
disminuye el riesgo de averías y ajustes.
- Buenas prestaciones: los microcontroladores permiten implementar algoritmos de control de elevada complejidad.
Actualmente es fácil encontrar una amplia gama de dispositivos microcontroladores adecuados para muchas aplicaciones, y suministrados por diversos fabricantes.

MEMORIA DESCRIPTIVA
24
Precisamente es la aplicación la que determina las prestaciones que deberá tener el microcontrolador. 1.4.4.1. Solución adoptada En este proyecto se utilizará un microcontrolador PIC18F258 del fabricante Microchip. La elección de este dispositivo se justifica en los siguientes puntos:
- Dispone de los periféricos necesarios para realizar la gestión de los cortocircuitos.
- Incorpora la mayor parte del hardware requerido para implementar un sistema de comunicaciones basado en el protocolo CAN.
- Dispone de capacidad de memoria más que suficiente para el programa que se
necesita.
- Es lo suficientemente rápido para la aplicación.
- Puede ser programado tanto en lenguaje ensamblador, lo que mejora la eficiencia del programa, como en lenguaje de alto nivel C, lo que facilita mucho la programación.
- Dispone de sistemas de programación y depurado software/hardware avanzados, lo
que permite ajustar el programa más fácilmente. 1.4.5. Detección de cortocircuitos Un cortocircuito será, en nuestro caso, un fenómeno aleatorio y no deseado que deberá ser detectado y eliminado con rapidez, por lo que emplearemos componentes electrónicos. Sabemos que, por definición, en el punto donde se produce un cortocircuito la diferencia de tensión es nula y la corriente que pasa por él tiende a infinito. En la realidad no se llegará a tensión nula y corriente tendiendo a infinito. Lo que tendremos será una gran disminución (y en algún caso incremento) de la tensión de las líneas de alimentación y un elevado aumento (y en algún caso disminución) de la corriente proporcionada por dichas líneas, pero siempre limitados por el sistema físico. 1.4.5.1. Detección por tensión A partir de simulaciones y ensayos de laboratorio previos a este proyecto, empleando únicamente baterías como sistema de alimentación (sin alternador ni convertidor DC/DC), se ha podido determinar las características físicas de los diversos cortocircuitos. Una de éstas es la variación brusca de la tensión de las baterías mientras existe el cortocircuito, fenómeno que depende, además, del tipo de éste. Por tanto, mediante unos circuitos comparadores de tensión ajustados a los niveles propios de cada cortocircuito, se puede detectar dicho cambio súbito en estos voltajes.

MEMORIA DESCRIPTIVA
25
Sin embargo, este método de detección de cortocircuitos presenta el inconveniente de que no permite discriminar si esta variación de tensión se ha producido por la existencia de un cortocircuito o porque la batería en cuestión se encuentra en un bajo nivel de carga. 1.4.5.2. Detección por corriente En las mismas simulaciones y pruebas de laboratorio comentadas en el punto anterior, se pudo determinar que las corrientes que deben suministrar (y en algún caso absorber) las baterías cuando se produce un cortocircuito son muy elevadas. Si se dispone de algún sistema que permita monitorizar la corriente de ambas baterías, se puede detectar esta variación de corriente repentina. El problema que presenta esta solución es que un pico de corriente elevado puede producirse debido a la conexión de una carga "pesada", sin que haya acontecido un cortocircuito. 1.4.5.3. Solución adoptada Viendo las características de ambas soluciones, se optará por combinarlas para poder determinar con certeza la aparición de un cortocircuito. La variación de tensión en la(s) batería(s) será la que ponga al sistema en alerta, mientras que el pico de corriente servirá como confirmación para estar seguros de que se ha producido un cortocircuito y evitar así posibles confusiones.

MEMORIA DESCRIPTIVA
26
1.5. Descripción general de la solución adoptada A continuación se expondrán las soluciones referentes a la detección y tratamiento de los cortocircuitos que se seguirán en el presente proyecto. Es decir, se mostrarán las líneas básicas de actuación (estrategia) de cara a la gestión de estos fenómenos indeseados. 1.5.1. Arquitectura empleada La arquitectura que se ha considerado en el presente proyecto es la mostrada en la figura siguiente:
Figura 1.10. Esquema básico de la arquitectura Dual Voltage empleada, con 2 nodos de baterías, 2 nodos de cargas y una red de comunicaciones.
Hay que destacar que se han representado ciertos elementos en color gris porque no existen en la implementación física que se ha realizado de este sistema. Estos elementos son el alternador de 42 V, los convertidores DC/DC 42 V/14 V, tanto el principal como los de las cajas de cargas y un módulo denominado SAA (Sistema de Alimentación Autónomo). Este último es el encargado de alimentar a los nodos del sistema, incluso cuando hay alguna perturbación importante (caso de un cortocircuito) en las líneas de alimentación principales. Por ello, para todo el resto de elementos se ha empleado la notación de batería, es decir, 36 V y 12 V, en vez de 42 V y 14 V, siendo la primera la que se utilizará de ahora en adelante.

MEMORIA DESCRIPTIVA
27
Una vez aclarado este punto, vamos a explicar brevemente cada una de las partes que compone esta arquitectura. En primer lugar tenemos los nodos asociados a sendas baterías. Al conjunto que forma cada batería con su respectivo nodo se le conoce como Smart Battery Box (Caja de Batería Inteligente) o simplemente Battery Box (Caja de Batería). Estos nodos son sistemas hardware basados en microcontrolador que permiten llevar a cabo diversas funciones. Por una parte, pueden realizar una gestión eficiente de las baterías, es decir, conociendo su estado de carga, temperatura, estado de vida, etc. pueden participar en la EEM (Electrical Energy Management, Gestión de la Energía Eléctrica) y asegurar un estado óptimo de carga. Por otro lado, los nodos también pueden realizar funciones de seguridad como en nuestro caso, en que serán los encargados de detectar y tratar los cortocircuitos. A continuación están los nodos de cargas, también conocidos como cajas de cargas (Load Box) o cajas de unión (Junction Box) a las cuales llegan las tensiones de alimentación y donde se conectan las cargas que requieren de alimentación eléctrica. En estas cajas también hay una circuitería basada en microcontrolador que puede actuar sobre los interruptores que conectan/desconectan las cargas y sobre el convertidor DC/DC que permite alimentar las cargas aunque falle una línea. Todos los nodos están conectados mediante una red de comunicaciones, lo que les permite enviarse información, incluso órdenes de control entre ellos. En nuestro caso se tratará de bus CAN. Por último, tenemos los fusibles. En una arquitectura real en el automóvil existen multitud de fusibles, pero en el sistema implementado únicamente se han incluido los fusibles principales. También se podría haber incluido un fusible en cada una de las cuatro ramas (bus) de alimentación que se tienen, pero uno de los objetivos del proyecto es evitar la necesidad de emplear tantos fusibles, ya que el sistema actúa con mayor rapidez que éstos (tardan más de 1 s en fundirse). En cuanto a los fusibles de las cargas, en una aplicación real pueden ser más rápidos (pocos µs) que este sistema, por lo que tal vez no pueda reemplazarlos. Aun así, no se han incluido para simplificar el sistema. 1.5.2. Detección de los cortocircuitos Como se aprecia en la figura 1.10, cada uno de los nodos de batería dispone de dos comparadores de tensión y dos de corriente (se necesita uno de cada para determinar un cortocircuito). El motivo es que cada uno de dichos nodos puede detectar dos tipos de cortocircuitos: el Nodo 36 V puede detectar el cortocircuito 36 V - GND y 36 V – 12 V, mientras que el Nodo 12 V hace lo propio con el de 12 V - GND y 36 V – 12 V. Los comparadores monitorizan continuamente la tensión y la corriente de las baterías, mientras que, en condiciones normales, los microcontroladores están haciendo cualquier cosa, ya que no están dedicados exclusivamente a la gestión de cortocircuitos. En el momento en que algún comparador de tensión se activa (pasa a ‘1’ lógico) porque se cumple su condición de comparación, el microcontrolador asociado deja lo que estaba haciendo y pasa a comprobar el comparador de corriente correspondiente para confirmar si se trata de un cortocircuito. En caso afirmativo (dicho comparador de corriente pasa a ‘1’

MEMORIA DESCRIPTIVA
28
lógico) existirá cortocircuito y, sabiendo qué comparadores se han activado, se determina qué tipo de cortocircuito ha sido de los tres posibles. Se comprueba primero la tensión porque reacciona más rápido que la corriente. Tras conocer el tipo de cortocircuito, el nodo encargado se su gestión determina en qué rama se ha producido y actúa en consecuencia, como veremos más adelante. Hay que remarcar que el sistema sólo puede tratar los cortocircuitos que se producen después de los interruptores de los nodos de las baterías, es decir, no puede gestionar un cortocircuito producido en bornes de la batería. Además, como ya se ha comentado, según lo rápido que se fundan los fusibles de las cargas, tampoco podría gestionar los cortocircuitos producidos en ellas. Por tanto, teniendo en cuenta estas dos consideraciones, todos los cortocircuitos realizados en el proyecto son entre los interruptores de los nodos de batería y los interruptores de los nodos de carga como muestra la siguiente figura.
Figura 1.11. Localización de los cortocircuitos realizados en este proyecto. A continuación veremos cómo se comportan los cortocircuitos desde el punto de vista de la tensión y la corriente de las baterías. Es importante aclarar que los niveles alcanzados dependerán tanto del estado de carga de las baterías como de su capacidad (sus Ah). En efecto, cuanto mayores sean ambos parámetros, más corriente podrán proporcionar durante el cortocircuito. Por este motivo, como se verá más adelante, nuestro sistema puede ajustar los umbrales de comparación de la tensión y corriente de las baterías. De esta forma se puede amoldar a la situación concreta que haya en cada instante. En nuestro caso, se ha procurado que las baterías estén bien cargadas antes de realizar los cortocircuitos.

MEMORIA DESCRIPTIVA
29
1.5.2.1. Cortocircuito 12 V - GND Todo lo referente a la detección y gestión de este cortocircuito lo lleva a cabo, exclusivamente, el Nodo 12 V. Cuando se produce un cortocircuito de este tipo la tensión de la batería de 12 V desciende bastante por debajo de los 10 V. Para detectar esa disminución se dispone de un comparador de tensión cuya salida pasa de ‘0’ a ‘1’ al producirse esta situación. Esta condición es detectada por el µC del Nodo 12 V que, inmediatamente, pasa a comprobar la salida del comparador de corriente correspondiente al anterior comparador de tensión. Si la corriente suministrada por la batería es superior a 50 A, entonces la salida del anterior comparador de corriente pasará de ‘0’ a ‘1’. Así pues, el Nodo 12 V habrá determinado la existencia inequívoca de un cortocircuito entre 12 V y masa. La siguiente gráfica muestra el comportamiento de la tensión y la corriente en este tipo de cortocircuitos, a partir del cual se han determinado los niveles de tensión y corriente comentados.
Figura 1.12. Tensión y corriente en la batería de 12 V al producirse un cortocircuito de 12 V - GND. NOTA: las mediciones se han realizado con un osciloscopio Tektronix TDS 754C y una sonda de corriente Tektronix A6304XL con el amplificador Tektronix AM 503B. El indicador “SC” (Short-Circuit, Cortocircuito) marca el instante en que se produce el cortocircuito. Se puede apreciar como la tensión disminuye bruscamente hasta llegar a 3 V y que la corriente aumenta hasta alcanzar más de 80 A. Por tanto, el comportamiento y los niveles de tensión y corriente se corresponden con los mencionados anteriormente. En esta gráfica se ve que el cortocircuito desaparece pasados unos 45 µs porque el sistema de gestión lo detecta y manda la orden de apertura a los interruptores BTS640.
Ch1: Tensión batería 12 V (10 V/DIV) Ch2: Corriente batería 12 V (20 A/DIV)
SC
10 V 13 V 13 V
50 A

MEMORIA DESCRIPTIVA
30
Es interesante comentar que este interruptor dispone de una protección contra cortocircuitos (por sobretemperatura) que abre automáticamente el interruptor aunque no se le envíe una orden de control externa. Además, presenta la característica de la reconexión, es decir, una vez se enfría vuelve a cerrarse y, si aparece de nuevo el cortocircuito, se vuelve a abrir. Este proceso se repite indefinidamente mientras existe el cortocircuito. El sobrepico de tensión que aparece en la batería (hasta 22,6 V) cuando se abre el interruptor se debe a efectos inductivos en la línea que intentan hacer que la corriente siga fluyendo en el mismo sentido, presentando una f.e.m. (fuerza electromotriz) elevada en ese punto. 1.5.2.2. Cortocircuito 36 V – GND Tanto la detección como la gestión de este cortocircuito son realizadas, únicamente, por el Nodo 36 V. En este caso, al producirse un cortocircuito, la tensión de la batería disminuye muy por debajo de 33 V, con lo que se debe ajustar el comparador de tensión correspondiente para que su salida pase de ‘0’ a ‘1’ al producirse esta situación. Ello es detectado por el µC del Nodo 36 V, que pasa a leer el estado del comparador de corriente adecuado. Si la corriente suministrada por la batería de 36 V es superior a 200 A, el comparador proporcionará ‘1’ a su salida. En este momento, el Nodo 36 V se habrá asegurado de la existencia de un cortocircuito entre 36 V y masa, con lo que comenzará su gestión. A continuación se presenta una gráfica con la que se justifican estos niveles de tensión y corriente:
Figura 1.13. Tensión y corriente en la batería de 36 V al producirse un cortocircuito de 36 V - GND.
Ch1: Tensión batería 36 V (25 V/DIV) Ch2: Corriente batería 36 V (100 A/DIV)
SC
33 V 37 V 37 V
200 A

MEMORIA DESCRIPTIVA
31
Se observa como la tensión de la batería disminuye bruscamente al producirse el cortocircuito hasta un valor muy inferior a los 33 V (9 V) y que la corriente aumenta muy por encima de los 200 A (hasta los 300 A). El cortocircuito desaparece pasados unos 55 µs porque es detectado por el sistema de gestión, que ordena la apertura de los interruptores BTS660. Estos interruptores también disponen de una protección contra cortocircuitos (por sobretemperatura) que abre el interruptor automáticamente sin necesidad de recibir una orden de control externa. Sin embargo, no disponen de la característica de reconexión y permanecen abiertos mientras no se les envíe una señal externa. Igual que antes, el sobrepico que se tiene en la tensión de la batería (hasta los 67 V) al abrirse el interruptor se debe a efectos inductivos en la línea. 1.5.2.3. Cortocircuito 36 V – 12 V Este cortocircuito es detectado tanto por el Nodo 12 V como por el Nodo 36 V, pero es gestionado sólo por este último. Mientras en los anteriores cortocircuitos el camino que sigue la corriente es obvio (“sale” de las baterías y se deriva hacia masa), en éste la corriente “sale” de la batería de 36 V “entra” en la de 12 V como se muestra a continuación:
Figura 1.14. Camino que sigue la corriente en un cortocircuito 36 V - 12 V. Este tipo de cortocircuito es, en principio, el más peligroso para las cargas de 14 V. Efectivamente, cuando se produce esta situación la tensión en ambas baterías trata de igualarse, pero no llegan a conseguirlo. Ello supone que la batería de 36 V disminuye su tensión hasta unos 26 V, mientras que la de 12 V la aumenta hasta unos 20 V. Sin embargo, la tensión de ambos buses, donde se ha producido el cortocircuito, sí se iguala, siendo unos 22 V su valor. Este nivel de tensión no es peligroso para las cargas de 42 V que, simplemente, dejan de funcionar, pero para las de 14 V puede suponer un riesgo. Así entonces, tanto el Nodo 12 V como el Nodo 36 V detectarán, gracias a sendos comparadores de tensión (ajustados a Vbat12 = 15 V y Vbat36 = 33 V), la situación anterior y pasarán a mirar la respuesta de sus respectivos comparadores de corriente. Si éstos indican ‘1’, se habrá cumplido el requisito que asegura la existencia de un cortocircuito entre los buses de 36 V y 12 V.

MEMORIA DESCRIPTIVA
32
Ya que la corriente es suministrada por la batería de 36 V, mientras que la de 12 V la absorbe, se deberá considerar de signo negativo de cara al sensor de corriente de esta última. El umbral comparación para la batería de 36 V será de 50 A, y el de la batería de 12 V será de –10 A (sólo se pretende detectar que es negativa). Únicamente se tendrá corriente negativa en la batería de 12 V cuando se produzca un cortocircuito entre ambas tensiones de alimentación. Veamos la respuesta en las siguientes figuras, en la que se aprecian los niveles indicados:
Figura 1.15. Tensión y corriente en la batería de 36 V al producirse un cortocircuito 36 V – 12 V.
Figura 1.16. Tensión y corriente en la batería de 12 V al producirse un cortocircuito 36 V – 12 V.
Ch1: Tensión batería 36 V (25 V/DIV) Ch2: Corriente batería 36 V (50 A/DIV)
SC 33 V
37 V 37 V
50 A
Ch1: tensión batería 12 V (10 V/DIV) Ch2: Corriente batería 12 V (50 A/DIV)
SC
15 V 12,6 V
12,6 V
-10 A

MEMORIA DESCRIPTIVA
33
Observamos que se cumplen los niveles de tensión y corriente comentados previamente.
La situación de cortocircuito desaparece porque el sistema de gestión manda abrir los interruptores BTS660 del Nodo 36 V. Este tipo de cortocircuitos sólo es tratable por este nodo porque los interruptores BTS640 del Nodo 12 V disponen de diodo volante que permiten el paso de la corriente hacia la batería de 12 V, aunque se mande abrir el interruptor. Además, este diodo es reforzado por otro en paralelo por protección, lo que ayuda aún más a esta situación. En ambos casos, al abrirse los interruptores aparecen sendos sobrepicos de tensión. En la batería de 36 V es un sobrepico “positivo” que alcanza los 63 V, mientras que en la batería de 12 V es un sobrepico “negativo” que hace bajar la tensión hasta poco más de 1 V. Este fenómeno se debe, igual que antes, a las inductancias parásitas de la línea. 1.5.3. Localización y aislamiento del cortocircuito Una vez se ha detectado y confirmado la existencia de un cortocircuito, y determinado su tipo, se debe conocer la rama en la que éste se ha producido. Como se ha comentado con anterioridad, sólo se puede actuar sobre los que aparezcan entre los nodos de batería y los nodos de carga. Ello limita las posibilidades a cuatro ramas: S361 – Sbox136, S362 – Sbox236, S121 - Sbox112, S122 – Sbox212, tal como se muestra en la figura 1.11. El sistema tiene control sobre los ocho interruptores que delimitan las anteriores ramas. Cuando se confirma un cortocircuito y se determina de qué tipo es, lo primero que se hace es desconectar los dos interruptores de los nodos de batería. Esto es, S121 y S122 si se trata de un 12 V - GND o S361 y S362 si es un 36 V - GND ó 36 V - 12 V. Una vez realizada esta operación, se comprueba si todavía persiste el cortocircuito. En caso afirmativo, se trata de un cortocircuito no tratable, que se encontraría en la propia batería, con lo que la única acción a realizar es dejar estos interruptores abiertos y mandar a abrir los de las cajas de carga para evitar posibles daños al resto del sistema. Si, por el contrario, el cortocircuito desaparece, significa que sí es tratable. Entonces, para saber en qué rama se encuentra, lo que se hace es cerrar uno de los interruptores. Si no vuelve a aparecer el cortocircuito, significa que se encuentra en la otra rama. Si vuelve a aparecer se mira si está también en la otra rama (pueden estar ambas ramas cortocircuitadas). Al final de este proceso se conoce exactamente cuál es la rama afectada por el cortocircuito. Una vez sabida la rama, se debe aislar el cortocircuito. Ello supone dejar abiertos los interruptores de ambos extremos (nodo de batería y nodo de carga). Cuando esto se ha realizado, estamos en una situación en la que el cortocircuito está completamente controlado, pero hay cargas que se han quedado sin alimentación. Para solucionarlo se debería activar, en caso de tenerlo, el convertidor DC/DC correspondiente en el sentido adecuado (reductor o elevador). Llegados a este punto, el sistema vuelve a estar funcionando en su totalidad. Sin embargo, ya que un cortocircuito puede no ser permanente, se debe intentar una posible reconexión de los interruptores, esto es, volver a la situación normal. Para ello se realiza una espera de 10 segundos, después de la cual se vuelve a conectar el interruptor de la caja

MEMORIA DESCRIPTIVA
34
de baterías que estaba abierto. Si no hay cortocircuito, significa que éste ha desaparecido y se retorna, por tanto, a la situación inicial (cerrando tanto este interruptor como su asociado en la caja de cargas). Si sigue existiendo el cortocircuito, se vuelve a abrir el interruptor. La siguiente representación pretende dar una idea gráfica de este proceso. Se ha escogido como ejemplo un cortocircuito 12 V – GND, pero no se ha incluido la reconexión, ya que ésta es muy simple.
Figura 1.17. Proceso de localización y eliminación de un cortocircuito 12 V - GND. La estrategia a seguir para los otros tipos de cortocircuitos es totalmente análoga a la aquí representada, pero lógicamente cambiando de interruptores y conectando los convertidores DC/DC en modo Boost.
Situación inicial Aparece
SC
Abre ambos interruptores
¿Aún hay SC?
Sí
No
SC no tratable
Abre ambos interruptores de cajas de carga y DC/DC modo Buck
Cierra un interruptor
¿Aparece SC?
No
SC en rama 2
Sí
Cambia los interruptores
¿Aparece SC?
Sí
No
SC en rama 1
SC en ambas ramas
Abre interruptor caja carga 2 y DC/DC modo
Buck
Abre interruptor caja carga 1 y DC/DC modo
Buck
Abre ambos interruptores de cajas de carga y DC/DC modo Buck

MEMORIA DESCRIPTIVA
35
1.6. Prescripciones Técnicas A continuación se detallarán algunas de las características más interesantes de diferentes dispositivos eléctricos/electrónicos empleados en el proyecto. 1.6.1. Microcontrolador PIC18F258 Se tendrá un microcontrolador como éste en cada uno de los nodos del sistema, tanto de baterías como de cargas. En un nodo de batería será el encargado de leer el estado de los comparadores de tensión y corriente y tomar las decisiones pertinentes para controlar los interruptores adecuados. También realizará otras funciones como son el envío de órdenes de control a los nodos de carga y ajuste de los comparadores. En otras aplicaciones más completas podría incluso monitorizar la batería y obtener datos del estado de carga, temperatura, etc.. Las características específicas más destacables de este componente son:
- Frecuencia de operación: DC – 40 MHz. - Operación hasta 10 MIPS (Millones de Instrucciones Por Segundo).
- Memoria de programa: 32 kbytes de memoria FLASH. - Memoria de datos: 1536 bytes de memoria RAM y 256 bytes de memoria EEPROM.
- 17 fuentes de interrupción, incluyendo 3 externas.
- Dos niveles de prioridad en las interrupciones.
- 3 puertos de Entrada/Salida: puerto A de 7 bits, puertos B y C de 8 bits.
- Conversor A/D de 10 bits con 5 canales de entrada.
- 4 temporizadores: Timer 0 de 8/16 bits, Timer 1 y Timer 3 de 16 bits, Timer 2 de 8
bits.
- Módulo Capturador/Comparador/PWM (CCP) configurable.
- Comunicaciones serie:
- MSSP (Master Synchronous Serial Port).
- SPI (Serial Peripheral Interface).
- I2C (Inter-Integrated Circuit).
- CAN (Controller Area Network).
- Cumple las especificaciones CAN 2.0B Active. - Velocidad de transmisión hasta 1 Mbit/s.
- Identificador estándar (11 bits) y extendido (29 bits). - Hasta 8 bytes de datos. - 3 buffers de transmisión con prioridades.
- 2 buffers de recepción.
- 6 filtros de aceptación del mensaje de 29 bits.

MEMORIA DESCRIPTIVA
36
- Priorización de los filtros de aceptación.
- Control avanzado de errores.
- USART (Addressable Universal Synchronous Asyncronous Receiver Transmitter).
- POR (Power-on Reset), Power-up Timer (PWRT) y Oscillator Start-up Timer (OST).
- Watchdog Timer (WDT) con su propio oscilador RC.
- Protección de código programable.
- Modo Sleep de ahorro de consumo.
- Programación ICSP (In Circuit Serial Programming) a través de dos pins.
La siguiente figura muestra la disposición de pins en un PIC18F258 con encapsulado SPDIP o SOIC de 28 pins.
Figura 1.18. Patillaje del PIC18F258. 1.6.2. Transceiver de CAN PCA82C251 Este componente es el encargado de convertir las señales lógicas de nivel TTL/CMOS (‘0’ = 0 V, ‘1’ = 5 V) provenientes del controlador de CAN (en nuestro caso integrado en el PIC18F258) a los niveles de tensión adecuados para ser transmitidos por el bus CAN. Este transceiver está pensado para transmitir en HS-CAN (CAN de alta velocidad).
Las características más remarcables de este componente son:
- Totalmente compatible con el estándar ISO 11898. - Protegido contra cortocircuitos a batería y masa.
- Baja corriente en modo de reposo (standby).
- Un nodo no alimentado no interfiere al bus.
- Pueden conectarse al menos 110 nodos.
- Alta velocidad de transmisión (hasta 1 Mbit/s).
- Alta inmunidad ante interferencias electromagnéticas.

MEMORIA DESCRIPTIVA
37
Su tabla funcional es:
Tabla 1.4. Tabla funcional del transceiver PCA82C251. La disposición de los terminales del componente es:
Figura 1.19. Patillaje del PCA82C251. 1.6.3. Transceiver de CAN TJA1054 A diferencia del transceiver anterior, éste está diseñado para transmitir en FT-CAN, es decir, CAN tolerante a fallos. Las características principales de este componente son:
- Velocidad de transmisión hasta 125 kbit/s. - Máximo de 32 nodos conectados.
- Muy bajas emisiones electromagnéticas.
- Buena inmunidad electromagnética.
- Filtros de recepción integrados.
- Soporta transmisión por un solo hilo.
- Cambio automático a modo de un solo hilo si fallo en el bus.
- Vuelta automática a transmisión diferencial si se repara el fallo.
- Capacidad de despertar (wake-up) durante modo de fallo.
- Protegido frente a cortocircuitos con la batería y masa.
- Bus protegido frente a transitorios en el entorno del vehículo.
- Un nodo no alimentado no interfiere en el bus.

MEMORIA DESCRIPTIVA
38
- Muy bajo consumo en modo de espera con activación por líneas del bus.
- Fácil diagnóstico de fallos. A continuación veremos la tabla de operación de este dispositivo:
Tabla 1.5. Tabla operacional del transceiver TJA1054. Los pins de este dispositivo se distribuyen en el encapsulado de la siguiente forma:
Figura 1.20. Patillaje del TJA1054.
1.6.4. Cuádruple Comparador de tensión LM339 Este componente es empleado en los diferentes comparadores, tanto de tensión como de corriente que se tienen en los dos nodos de batería. Al ser cuádruple, con uno solo en cada nodo ya es suficiente. Sus características más interesantes son:
- Permite alimentación simple (a +5 V es ideal para circuitos digitales) o simétrica.
- Bajo consumo de corriente (máximo 2 mA).
- Baja corriente de entrada (máximo 250 nA).
- Baja corriente de offset (máximo ±50 nA).
- Baja tensión de offset (máximo ±5 mV).

MEMORIA DESCRIPTIVA
39
- Salida compatible con TTL, CMOS, etc.
- Tiempo de respuesta máximo 1,3 µs.
- Corriente de salida 16 mA.
- Salida en colector abierto.
La disposición de pins que presenta es:
Figura 1.21. Pins del LM339.
1.6.5. Doble Amplificador Operacional LM258 Este amplificador operacional de baja potencia es utilizado para realizar el acondicionamiento de la señal de salida de los sensores de corriente en cada nodo de batería. Las características más destacables de este componente son:
- Gran ganancia de tensión en continua: 100 dB. - Compensación interna para ganancia unidad.
- Elevado ancho de banda para ganancia unidad: 1 MHz.
- Gran margen de alimentación:
- Alimentación Simple: 3 V a 32 V.
- Alimentación doble: ±1,5 V a ±16 V.
- Corriente de alimentación muy baja: 500 µA.
- Baja tensión de offset a la entrada: 2 mV.
- Elevada excursión de la tensión de salida: 0 V a V+-1,5 V.

MEMORIA DESCRIPTIVA
40
Los encapsulados DIP y SOIC tienen la siguiente configuración:
Figura 1.22. Diagrama de pines del LM258.
1.6.6. Potenciómetros digitales MCP41010 y MCP42010 Estos potenciómetros forman parte de los circuitos de comparación de tensión y corriente que se tienen en ambos nodos de batería. Con ellos es posible ajustar sendos umbrales de comparación de forma adecuada. Además, son programables mediante protocolo SPI, lo que facilita mucho su configuración porque el microcontrolador empleado ya dispone del hardware adecuado para ello. El modelo MCP41010 sólo dispone de un potenciómetro, mientras que el MCP42010 tiene dos. El valor nominal de los potenciómetros en ambos casos es de 10 kO. Las características más remarcables de estos dispositivos son:
- El ajuste de los potenciómetros se realiza mediante 8 bits, lo que implica que se tienen 256 posibles valores.
- Interfaz de programación SPI en modos 00 y 11.
- Precisión de ±1 LSB (Less Significant Bit, Bit Menos Significativo).
- Tecnología CMOS de bajo consumo.
- Consumo de corriente de 1 µA máximo en operación estática.
- Consumo de corriente máximo en operación dinámica de 500 µA.
- Facilidad de interconectar en cadena (daisy-chain) varios de estos componentes (sólo
modelos MCP42XXX).
- En modo de desconexión abre los circuitos de los resistores para máximo ahorro de energía.
- Pin para desconexión hardware en modelos MCP42XXX.
- Alimentación simple (2,7 V a 5,5 V).
- El ancho de banda a -3 dB es de 1 MHz.
- Tiempo de establecimiento de 2 µs.
- Tolerancia de ±20 %.

MEMORIA DESCRIPTIVA
41
- La máxima frecuencia del reloj es 10 MHz. Las conexiones de los encapsulados son:
Figura 1.23. Diagrama de pines del MCP41010 y MCP42010. 1.6.7. Transductor de corriente LA 55-P/SP1 Se trata del sensor empleado para conocer la corriente que suministra o absorbe la batería de 12 V. Es un transductor en lazo cerrado (compensado) basado en el efecto Hall, que permite medir corrientes DC, AC, pulsantes, etc. ofreciendo aislamiento galvánico entre el circuito primario (alta corriente a medir) y el circuito secundario (circuito electrónico). Sus principales características son:
- Corriente nominal del primario (la que se quiere medir): 50 Arms.
- Rango de medida de la corriente del primario: 0 a ±100 A.
- Corriente nominal del secundario: 25 mA.
- Relación de conversión: 1:2000.
- Tensión de alimentación (±5 % de tolerancia): ±12 V a ±15 V.
- Consumo de corriente: 10 mA.
- Elevada precisión: ±0,65 % a ±0,90 %.
- Buena linealidad: inferior al 0,15 %.
- Bajas derivas con la temperatura.
- No provoca pérdidas por inserción.
- Elevada inmunidad frente a interferencias externas.
- Buena capacidad de sobrecarga.
- Tiempo de reacción al 10 % de la corriente máxima: inferior a 500 ns.
- Tiempo de respuesta al 90 % de la corriente máxima: inferior a 1 µs.
- Ancho de banda a -1dB: DC a 200 kHz.

MEMORIA DESCRIPTIVA
42
El encapsulado de este componente es:
Figura 1.24. Encapsulado y conexiones del LA 55-P/SP1. 1.6.8. Transductor de corriente HAS 100-S Análogamente al anterior, éste es el sensor de corriente para la batería de 36 V. También se basa en el efecto Hall y permite medir corrientes DC, AC, pulsantes, etc., ofreciendo aislamiento galvánico entre el primario y el secundario. Sin embargo, a diferencia del anterior, éste proporciona a su salida una tensión proporcional a la corriente del primario. Como características a destacar tenemos:
- Corriente nominal del primario (la que se quiere medir): 100 Arms. - Rango de medida de la corriente del primario: ±300 A.
- Tensión de salida a ±100 A (con RL = 10 kO): ±4 V ±40 mV (0,04 V/A ± 0,4
mV/A).
- Resistencia de carga: mayor a 1 kO.
- Tensión de alimentación (±5 % de tolerancia): ±15 V.
- Consumo de corriente bajo: ±15 mA.
- Buena capacidad de sobrecarga: 30000 A.
- Alta tensión de aislamiento: 3000 VAC.
- Elevada precisión: inferior a ±1 %.
- Buena linealidad: inferior a ±1 %.
- Bajas derivas con la temperatura.
- Tiempo de respuesta al 90 % de la corriente máxima: inferior a 3 µs.
- Ancho de banda a -3dB: DC a 50 kHz.

MEMORIA DESCRIPTIVA
43
El encapsulado y conexiones de este sensor se muestran seguidamente:
Figura 1.25. Encapsulado y conexiones del HAS 100-S. 1.6.9. PROFET BTS 640 S2 Estos componentes son los interruptores que se tienen en el bus de 12 V, es decir, S121, S122, Sbox112 y Sbox212. Como interruptor son básicamente un MOSFET con diodo volante, pero además de eso incluyen multitud de funcionalidades, lo que les sitúa dentro de la categoría de interruptores “inteligentes”. Algunas sus características más interesantes son:
- Tensiones de operación: 5,0 V a 34 V (máximo de 43 V).
- Resistencia en conducción: 30 mO.
- Corriente de carga: 12,6 A.
- Limitación de corriente: 24 A.
- Protección contra cortocircuito por pico inicial: entre 40 y 58 A.
- Disipación de potencia: 85 W máximo.
- Tiempo de conexión a 90 % de tensión de salida: de 25 a 150 µs.
- Tiempo de desconexión a 10 % de tensión de salida: de 25 a 200 µs.
- Slew rate de conexión: de 0,1 a 1 V/µs.
- Slew rate de desconexión: de 0,1 a 1 V/µs.
- Sensado de corriente proporcional a la corriente de carga (1:5000 típico).
- Entrada de activación/desactivación compatible CMOS.
- Protección contra sobrecarga.
- Apertura por sobretemperatura.
- Protección contra sobretensión, incluyendo load dump (a 60 V) con resistor externo.
- Protección contra descargas electrostáticas (ESD).

MEMORIA DESCRIPTIVA
44
- Protección por pérdida de masa o tensión. Los formatos de encapsulado y conexiones de este componente son:
Figura 1.26. Encapsulado y conexiones del BTS 640 S2. 1.6.10. PROFET BTS 660P Éstos son los interruptores que se tienen en el bus de 36 V, es decir, S361, S362, Sbox136 y Sbox236. Igual que antes, son básicamente un MOSFET con diodo volante y disponen además de toda una circuitería integrada que aporta más prestaciones. Veamos sus características más reseñables:
- Tensiones de operación: 5,0 V a 58 V (máximo de 62 V). - Resistencia en conducción: 9 mO.
- Corriente de carga: 44 A.
- Limitación de corriente por cortocircuito: 90 A.
- Disipación de potencia: 170 W máximo.
- Tiempo de conexión a 90 % de tensión de salida: de 50 a 400 µs.
- Tiempo de desconexión a 10 % de tensión de salida: de 30 a 110 µs.
- Slew rate de conexión: de 1,0 a 2,2 V/µs.
- Slew rate de desconexión: de 1,1 a 2,6 V/µs.
- Sensado de corriente proporcional a la corriente de carga (1:13000 típico).
- Activación/desactivación por corriente.
- Protección contra sobrecarga.
- Apertura por sobretemperatura.
- Protección contra sobretensión (a 70 V), incluyendo load dump (a 80 V) con resistor
externo.
- Protección contra descargas electrostáticas (ESD).
- Protección por pérdida de tensión.

MEMORIA DESCRIPTIVA
45
El encapsulado y conexionado de este dispositivo es:
Figura 1.27. Encapsulado y conexiones del BTS 660P. 1.6.11. Diodo Schottky 40CPQ060 Estos diodos se utilizan para proteger los interruptores principales, es decir, S121, S122, S361 y S362, como se verá en el apartado 2.6.. Las características de estos diodos son:
- Corriente media máxima: 40 A.
- Tensión inversa máxima: 60 V.
- Corriente máxima de pico no repetitivo: 3200 A.
- Corriente máxima de pico repetitivo: 320 A.
- Caída de tensión máxima en conducción: 0,68 V.
- Corriente inversa máxima: 1,7 mA. Su encapsulado se muestra seguidamente:
Figura 1.28. Encapsulado y conexiones del 40CPQ060.

MEMORIA DESCRIPTIVA
46
1.6.12. Supresor de transitorios 5KP24A Al igual que el diodo anterior, este componente también se utiliza para proteger a los interruptores principales. En concreto, para los de la batería de 36 V S361 y S362, como se indicará en el apartado 2.6.. Algunas características de estos supresores son:
- Disipación de potencia por pico pulsante: 5000 W.
- Pico de corriente no repetitivo: 400 A.
- Pico de corriente pulsante: 128 A.
- Disipación de potencia en estacionario: 8 W.
- Tensión inversa: 24 V.
- Tensión de ruptura: 26, 7 a 29,5 V. El encapsulado es como el de un diodo, con ánodo y cátodo. 1.7. Planificación y Programación En la planificación del proyecto se debe tener en cuenta que lo que se pretende implementar es un prototipo, lo que supone que los métodos y sistemas de producción están limitados a nivel de laboratorio. Sin embargo, son más que suficientes para realizar un prototipo que nos permita llevar a cabo el estudio deseado sin problemas. A continuación se detallan los diferentes pasos que se han seguido para la consecución del proyecto:
- Paso 1: adquisición de conocimientos previos.
- Paso 2: estudio comparativo de las diversas estrategias de gestión y control.
- Paso 3: diseño del hardware necesario.
- Paso 4: elección de los componentes idóneos para la construcción del sistema hardware. Serán aquellos que cumplan las especificaciones a un menor coste.
- Paso 5: implementación del sistema hardware.
- Paso 6: diseño del software necesario.
- Paso 7: puesta en marcha del sistema y realización de ajustes.
- Paso 8: verificación del correcto funcionamiento y realización de las medidas
pertinentes.
- Paso 9: redacción del informe final.

MEMORIA DESCRIPTIVA
47
Podemos representar la planificación en un diagrama de GANNT aproximado:
Semanas Paso
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1 2 3 4 5 6 7 8 9
Tabla 1.6. Diagrama de GANNT de la planificación del proyecto.
De este diagrama se puede extraer que el tiempo aproximado para la creación y ajuste de un prototipo para la gestión adaptativa de cortocircuitos en una arquitectura Dual Voltage 14 V/42 V empleando protocolo CAN es de unas 16 semanas, incluyendo el correspondiente informe. 1.8. Puesta en marcha y funcionamiento Previamente a realizar las pruebas con cortocircuitos reales es necesario tomar ciertas precauciones para una correcta utilización del sistema y para no correr ningún riesgo, tanto para el propio sistema como para el usuario. Algunas de dichas precauciones son:
- Revisar las conexiones eléctricas de las diferentes placas (alimentación, señal, etc.) y entre sí, asegurándose de no tener tensión en ninguna de ellas.
- Asegurarnos del correcto estado de las baterías (estado de carga, líquido,
estanqueidad, etc.).
- Evitar las polaridades inversas, sobre todo cuando se trata de las baterías.
- Disponer de protecciones para evitar el contacto directo de una persona con los terminales de las baterías.
- Utilizar separadores de tierra para los aparatos, tales como fuentes de alimentación,
osciloscopios, multímetros, etc., para evitar problemas de masa, en caso de no estar seguros de que existe total aislamiento entre la conexión a tierra de la instalación eléctrica del laboratorio y la masa de los aparatos.
Complementando a estas recomendaciones, un buen consejo es realizar pruebas del funcionamiento del sistema simulando los cortocircuitos con fuentes de alimentación, antes de utilizar las baterías. Esto es, antes de realizar cortocircuitos reales con las baterías, se conectan fuentes de alimentación regulables y se ajustan para que el sistema se comporte como debería hacerlo realmente. Así se pueden encontrar errores sin comprometer a los componentes y/o al usuario.

MEMORIA DESCRIPTIVA
48
1.8.1. Placas del sistema y conexiones Seguidamente se mostrarán unas imágenes que intentan dar una idea de la ubicación de los componentes y conexiones más interesantes en las diferentes placas (circuitos impresos) de que se compone el sistema. Con ello se pretende facilitar el posible montaje y utilización de este sistema por parte de un usuario cualquiera. Las nomenclaturas de los componentes se corresponden totalmente con las que se tienen en los planos de las placas (ver capítulo de planos). 1.8.1.1. Placa del Nodo 12 V En esta placa se encuentran los circuitos necesarios (microcontrolador, comparadores, acondicionadores de señal, comunicaciones, interruptores, etc.) para la detección de los cortocircuitos 12 V – GND y 36 V – 12 V y el posterior tratamiento del primero de ellos. A continuación se muestra el aspecto de la placa (a un 66 % del tamaño real).
Figura 1.29. Ubicación de los elementos más interesantes en la placa del Nodo de 12 V.

MEMORIA DESCRIPTIVA
49
En la parte superior izquierda de la placa podemos observar un conector de color gris (J1). Se trata de un conector de tipo RJ11 de 6 pins, utilizado para conectar la placa con el dispositivo de programación y depuración ICD2 de Microchip. En efecto, para poder programar el microcontrolador de la placa se ha empleado el software MPLAB y el hardware ICD2, ambos de Microchip. Este último permite la programación ICSP (programación del microcontrolador sobre la propia placa de aplicación), además de la depuración del código en tiempo real, es decir, sobre el propio circuito en funcionamiento. Esta herramienta de depuración es muy útil para ajustar el programa. A la derecha del anterior tenemos el conector J2, a donde llegan las tres tensiones de alimentación (+5 V y ±15 V) que son necesarias para los diversos componentes del circuito. El pulsador de Reset (SW1) está conectado al microcontrolador y sirve para forzar al programa a ejecutarse desde el principio en un momento dado. Esto es muy útil ya que a veces interesa provocar esta situación (para inicializar las variables del programa, desbloquear al µC, etc.). Ello también se consigue desconectando y volviendo a conectar la alimentación del microcontrolador, ya que cuando éste recibe tensión inicialmente realiza un reset interno de forma automática. Sin embargo, es mucho mejor utilizar un pulsador a tal efecto. En la zona central izquierda se tiene el conector de CAN (J3), mediante el cual esta placa se conecta por bus CAN con el resto de placas del sistema, empleando un par de cables trenzado. Respecto a la comunicación por CAN, debemos destacar que se tienen dos transceivers, uno de High Speed (U4, PCA82C251) y otro de Fault Tolerant (U5, TJA1054). En realidad, sólo con uno ya se tiene suficiente para realizar las comunicaciones que necesitamos. Sin embargo, en el automóvil unas veces prima la velocidad en la transmisión y en otras la seguridad. Por ello se ha dispuesto de uno de cada, para utilizar el que se prefiera y demostrar que con ambos se pueden obtener buenos resultados. Lógicamente, no se pueden tener ambos transceivers conectados al bus y al microcontrolador al mismo tiempo ya que se interferirían entre sí. Para seleccionar el que se quiere emplear, se utilizan los microinterruptores (microswitch) SW2, SW3, SW4 y SW5. La tabla de configuración que se tiene es:
PCA82C251 (HS-CAN) TJA1054 (FT-CAN) 1 ON OFF SW2 2 ON OFF
1 OFF ON SW3 2 OFF ON
1 OFF ON 2 OFF ON 3 OFF ON
SW4
4 OFF ON
SW5 ON OFF
Tabla 1.7. Configuración para la selección de los trasnceivers.

MEMORIA DESCRIPTIVA
50
Toda la zona inferior de la placa está destinada a las conexiones de potencia, es decir, las uniones con la batería de 12 V y con los buses de 12 V. El sensor Hall (U7) está dispuesto de tal forma que el cable del terminal positivo de la batería pase por su interior para llegar al conector, mientras que el correspondiente al terminal negativo se conecta su lado (J4 incluye ambos conectores). También tenemos los interruptores BTS640 (U6 es S121 y U8 es S122) y sendos diodos de protección D7 y D8. A estos interruptores les llega la tensión de la batería y ellos su vez la llevan a sus respectivos buses de alimentación. Asociados al interruptor S121 están los Test Points (Puntos de Prueba) TP1 y TP2, mientras que S122 tiene TP3 y TP4. Estos puntos de prueba nos sirven para observar las señales de control de los interruptores. Por último, comentar que los terminales de los conectores J4, J5 y J6 son de tipo FASTON macho, lo que permite una fácil y rápida conexión, además de ser robustos.

MEMORIA DESCRIPTIVA
51
1.8.1.2. Placa del Nodo 36 V Esta placa es totalmente análoga a la anterior, pero adaptada a trabajar con la batería y buses de 36 V. Por tanto, puede detectar y gestionar los cortocircuitos 36 V – GND y 36 V – 12 V. También se presenta a un 66 % de su tamaño real:
Figura 1.30. Ubicación de los elementos más interesantes en la placa del Nodo de 36 V. En este caso podemos apreciar que ambos interruptores S361 y S362 son BTS660 y que se dispone, además de los diodos D6 y D7, de los supresores S1 y S2 para protegerlos frente a los sobrepicos. La conexión del terminal positivo de la batería también debe hacerse pasando el cable por el interior del sensor de corriente. Una diferencia de este sensor respecto al anterior es que sus terminales de conexión no son soldables directamente en la placa, sino que deben

MEMORIA DESCRIPTIVA
52
ser conectados mediante un cable (de 4 hilos) a otro conector que sí esté soldado a dicha placa (conector a la izquierda de U9). La configuración de los microinterruptores SW2 a SW5 es idéntica a la anterior placa. 1.8.1.3. Placas de los nodos de cargas Estas placas son las responsables de llevar la alimentación de los buses de 12 V y 36 V a las respectivas cargas. Cada una de ellas está conectada a un bus de 12 V y otro de 36 V, proporcionando, por tanto, tensión a cargas de ambos tipos. En el sistema implementado se dispone de dos placas como la que se presentará a continuación. Por ello los interruptores se presentan como Sboxn12 y Sboxn36, siendo “n” 1 ó 2 en función de si se trata del Nodo de carga 1 o del Nodo de carga 2, respectivamente. Se representa a un 60 % de sus dimensiones reales:
Figura 1.31. Ubicación de los elementos más interesantes en las placas de los Nodos de cargas. Podemos observar como se tiene un interruptor de cada tipo (BTS640 y BTS660), cada uno para un bus de tensión diferente.

MEMORIA DESCRIPTIVA
53
Del conector J3 salen las señales de control para el convertidor DC/DC 42 V/ 14V bidireccional que debería haber en cada nodo de cargas. Su tabla de configuración sería:
DC/DC ON/OFF BUCK BOOST Estado
Convertidor 0 X X Apagado 1 1 0 Modo Buck 1 0 1 Modo Boost 1 1 1 No posible
Tabla 1.8. Señales de configuración de los DC/DC de las cajas de cargas.
Los microinterruptores SW2 a SW5 se configuran de igual forma que en las otras placas. 1.8.1.4. Placa de cortocircuitos Esta placa no forma parte del sistema de gestión de cortocircuitos en sí, sino que únicamente es un medio utilizado para provocar cortocircuitos en los buses del sistema. Está formada por relés electromecánicos de automóvil y su aspecto (a 50 % de su tamaño real) es:
Figura 1.32. Aspecto de la placa de cortocircuitos.
Como se puede apreciar, se dispone de un relé para cada uno de los cuatro buses de potencia del sistema y otro para la masa. Podemos considerar los relés como interruptores,

MEMORIA DESCRIPTIVA
54
de tal forma que cada uno de ellos tiene uno de sus terminales conectado a sendo bus o masa, y el otro a un punto común a todos los relés. Para abrir o cerrar un relé simplemente hay que actuar sobre su correspondiente interruptor de palanca (? OFF y ? ON). Así pues, el funcionamiento de esta placa es muy sencillo: cuando se quiere producir un cortocircuito entre unas ramas, lo único que hay que hacer es actuar sobre sus interruptores de palanca, colocándolos en posición ON (relé cerrado). 1.8.2. Montaje del sistema La siguiente fotografía muestra la disposición del montaje real de todo el sistema:
Figura 1.33. Fotografía del sistema montado en el laboratorio.
1.8.3. Comprobaciones y ajustes
1. Asegurarse de que los componentes de la placa están conectados correctamente (evitar polaridades inversas, conexiones cruzadas, etc.).
2. Comprobar la correcta conexión de las diversas alimentaciones y conexiones con
otras placas.
3. Programar el microcontrolador.
PC
Osciloscopio Sonda de corriente
Batería 12 V Batería 36 V
Placa de SC Nodo 12 Nodo 36 Nodo Carga 2
Nodo Carga 1
Cargas
Fuente de alimentación

MEMORIA DESCRIPTIVA
55
4. Cerciorarse de que los comparadores de tensión y corriente se activan con los niveles esperados. Para ello emplear fuentes de tensión en vez de las baterías.
5. Antes de realizar cortocircuitos reales, verificar la correcta carga de las baterías y
recargarlas en caso necesario. 1.9. Resumen del presupuesto El presupuesto del desarrollo e implementación de un prototipo para la detección y gestión adaptativa de cortocircuitos en una arquitectura Dual Voltage 14 V/42 V basado en protocolo CAN asciende a la cantidad total de:
7399,89 €
El precio total del presupuesto asciende a SIETE MIL TRESCIENTOS NOVENTA
Y NUEVE EUROS CON OCHENTA Y NUEVE CÉNTIMOS.
Tarragona, a 1 de Septiembre de 2006
El INGENIERO
Fdo. Javier Duque Guerrero