Embed Size (px)
Citation preview

detctor, i I. IntroductionI"-
Fig. 6. Radiometer incorporation horizon sensor for spinningsatellite.
[51 P.V. Dijk, "Infrared detection for satellite attitude sensing:The ANS horizon sensor," Proc. First European Electro-optics Markets and Technology Conf., vol. 64, 1972.
[61 D. Sciacovelli, "Measurement errors of pencil beam infraredsensors in transfer orbit," European Space Research andTechnology Organization, Noorewijk, The Nederlands,ESTEC Internal working paper 1066, Mar. 1977.
[71 M.J. Brewer and T.H.P. Jones, "Modelling of Earth radiancefrom ESRO IV-HCI data," European Space Research Organi-zation, Noorewijk, The Nederlands, Tech Rep.ESS/SS722, Sept. 1966.
Improved Range Resolution Filters for Rectangular-Pulse Radar Systems
Abstract
The performance of several new clutter-reduction filters suit-able for rectangular-pulse radar systems is investigated. Thenew filters consist of various approximations and modificationsof two filters known to be optimal for certain criteria: the well-known Urkowitz filter which optiizes the clutter improvementratio, and the newer sidelobe reduction filter which minimizesoutput noise power subject to peak sidelobe constaints. Thenew filters are compared usig five basic criteria: clutter im-provement ratio, signal-to-noise ratio, sidelobe peak ratio, pulsecompression ratio, and filter complexity. The results are sum-
marized in tabular and graphical form.
Manuscript received February 21, 1978; revised August 18,1978 and July 20, 1979.
0018-9251/80/0300-0238 $00.75 ©)1980 IEEE
Despite the considerable attractions of pulse-com-pression techniques, the additional cost and complexityare often not warranted and a great many radar systemscontinue to use a finite-length rectangular pulse of con-stant frequency [ 1 1, 12]. Unfortunately, however, thechoice of pulse length T is usually determined by manycompromises. On the one hand, T must be large in orderto achieve the desired long-range detection and movingtarget indicator (MTI) performance; but on the otherhand, long pulses mean poor range resolution and poordetection in weather clutter. It is possible to resolve par-tially the dilemma by using long Dulses so that long-rangedetection in noise is not compromised, and using specialreceiver filtering techniques to improve the detectabilityof short-range targets in clutter.
Two basic approaches have been used to improve de-tection in weather clutter in radar systems. The first isto maximize the ratio of peak signal-to-clutter power ina linear portion of the receiver. This was the approachtaken by Urkowitz [1] and the optimum filter, whenthe thermal noise is neglected and no Doppler knowl-edge is assumed, is the well-known inverse filter [1, 6, 13].This work has been extended to include thermal noise,Doppler information, etc., and is summarized in [19].The second approach does not actually improve the basicsignal-to-clutter ratio, but instead attempts to normalizethe clutter power and provide a clutter-free video pre-sentation; this produces the so-called constant false-alarm rate (CFAR) receivers [6, 7].
The basic idea in the latter case is that the clutterbackground is "averaged" and this average clutter levelis used to derive a varying threshold level for target de-tection [14-18]. These cell-averaging CFAR receivershave been shown to provide effective CFAR action fora variety of clutter distributions including the well-knownWiebull, log-normal, and Rice distributions. When con-sidering weather clutter, however, and assuming thatthere are many scatterers per resolution cell, it is knownthat the Rayleigh model is satisfactory and log-CFARsystems are often used in preference to cell averagingsystems. They rely upon the fact that statistically-dis-tributed clutter can be modeled as Rayleigh noise witha changing variance. A log-amplifier converts the clutterto constant variance noise with a varying mean, and high-pass filtering is then used to remove the varying mean.The best-known log-CFAR receivers are log- fast timeconstant (FTC) [2], log pulse length discrimination (PLD)[3], and cell-averaging log-CFAR [4, 7].
It is important to note that the cell-averaging CFARreceivers can be thought of as high-pass fiters. The back-ground averaging is essentially a low-pass action and theoverall effect of subtracting this averaged signal fromthe original signal is to create a high-pass function.
There are several difficulties with the currently avail-able clutter-reduction techniques. First, the output ofthe Urkowitz filter consists of a single spike, which does
IEEE TRANSACTION ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. AES-16, NO. 2 MARCH 1980238

mean a substantial improvement in resolution and a sig-nificant reduction in clutter,' but the output signal-to-noise ratio is zero. Another difficulty is that the filterhas an infinitely extended impulse response. In orderto realize this, Urkowitz proposed a feedback arrange-ment which turns out to be unstable in noise.
In this paper we describe optimal and suboptimalfilters which can be used to improve directly the signal-to-clutter ratio with high-resolution and low-detectionambiguity in a linear receiver.
The filters can be divided into two groups. The firstgroup consists of the extended sidelobe reduction filter(ESRF) and its high-pass equivalent, which were presentedin [8] and were developed using the methods described in[9, 10]. They solve the following problem: find a filterwhose rectangular-pulse response has a specified outputpulewidth (which determines the resolution performance),and a specified sidelobe-to-peak ratio (which determinesthe detection ambiguity and clutter performance). Thefilter must have a specified finite-length impulse responseand the output signal-to-noise ratio (probability of de-tection [5, 6]) is maximized. The second group of fil-ters consists of various approximations of Urkowitz's"optimum" filter. The Urkowitz feedback circuit is modi-fied to improve stability and output signal-to-noise ratioat the expense of performance in clutter and output side-lobe structure.
The new filters are all compared on the basis of theirsidelobe structure, output signal-to-clutter ratio, anddetection-in-noise performance. A short-pulse trans-mitter (SPT) with matched filter receiver is also includedin the comparisons.
The high-pass characteristics of several of the filtersare also compared and discussed in terms of their abilityto reject "weather clutter blocks." Note that all of thefilters discussed here, apart from the ESRF, are high-pass filters.
II. Radar Filters
In this section we compare seven receiver filters onthe basis of their performance in noise and clutter. Thereceiver model, shown in Fig. 1, is as follows. A rectan-gular input signal of length T and amplitude 1/V/T -is cor-rupted by additive white noise with unit variance and thenpassed through a linear receiver filter with impulse responseu(r),-oo < r < oo. The noise power at the filter output is
00
given by f u2 (r) dr and the noiseless output waveform 4i(t)is simply the convolu.tion of u(t) and the retangular inputpulse. The peak output signal is denoted iP(O) and the
00
total output signal energy is f ip2(t) dt.There are four basic properties used in the compari-
son of the seven filters.
1 The reduction in clutter becomes increasingly less effectiveas the clutter departs from a Rayleigh distribution.
additive noise
Input s
17K/Output
(t)
Fig. 1. Basic receiver model.
1.. Properties
A. Clutter Improvement Ratio I. This is the ratioof the output signal-to-clutter ratio to the input signal-to-clutter ratio,
I_ (S/C) tI(S/C)i
where
(S/C)in = /IT
00
(S/C)out = p2(0)/f 2 (t) dt.
B. Output Signal-to-Noise Ratio (SNR). This is defmedas the ratio of the output peak to the matched filter out-put peak,
SNR 4 4/2(O)/f u2 (T) d-.--00
C. Sidelobe-to-Peak Ratio e. This is the ratio of themaximum sidelobe level to the output peak. The side-lobes are defined as anything outside the defmed main-lobe pulsewidth of 26. (See Fig. 1.) Thus for any givenmainlobe pulsewidth 26 the sidelobe-to-peak ratio e isgiven by
eA max {Ia(t)I}/./(0)I.t¢(-6, 6)
For all the cases considered here the mainlobe width 26is the distance between the zero-crossings immediatelyon either side of the mainlobe.
D. Compression Ratio 6/T. This is the ratio of thematched-filter output width to the filter-output mainlobepulsewidth. (See Fig. 1.)
The seven filters to be compared on the above fourproperties are now presented.
2. Filters
All the filters described below are ideally bandlimitedusing the basic bandlimiting element (BLE) and pulse-forming element (PFE) shown in Fig. 2. These elements
0018-9251/80/0300-0239 $00.75 C) 1980 IEEE
CORRESPONDENCE 239
(A)
it
(B)(E)
-I I-1 I 1 k
2 +k 1
L 21-2k(l-k)(o) (sf1-k)4(o) 4k(1-k) 1l(o) k -(o)
1 (14-
4 F, SIi - 3L T
1T 2-
(i) Tmpulse response
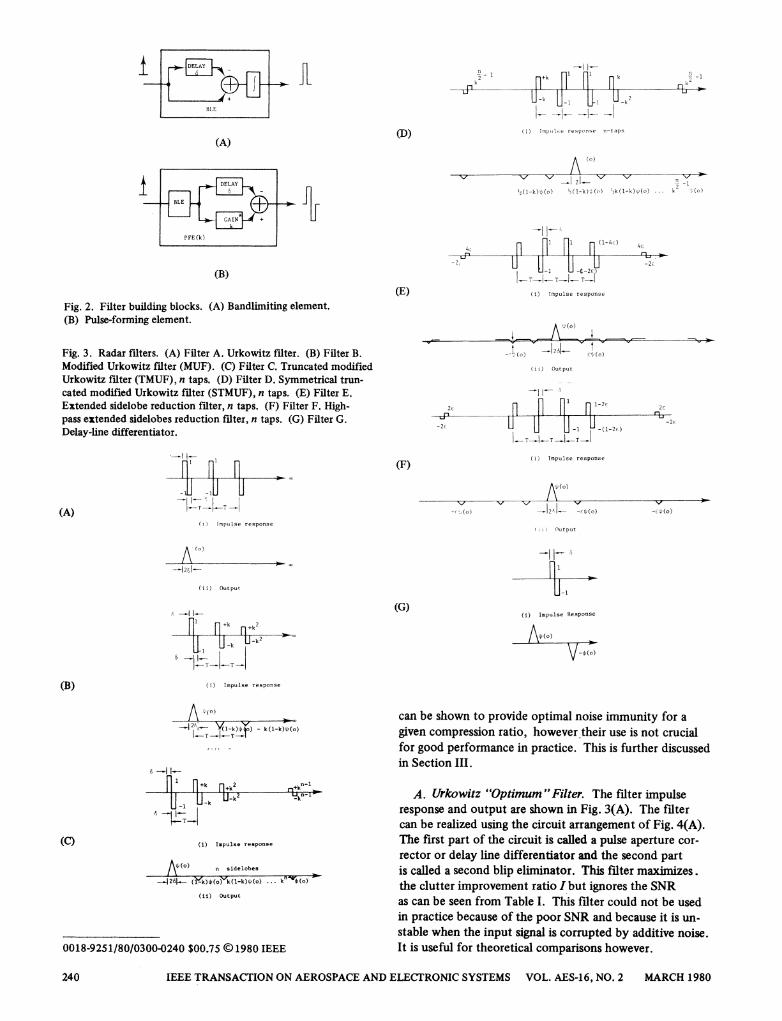
Fig. 2. Filter building blocks. (A) Bandlimiting element.(B) Pulse-forming element.
Fig. 3. Radar filters. (A) Filter A. Urkowitz filter. (B) Filter B.Modifi'ed Urkowitz filter (MUF). (C) Filter C. Truncated modifiedUrkowitz filter (TMUF), n taps. (D) Filter D. Symmetrical trun-cated modified Urkowitz filter (STMUF), n taps. (E) Filter E.Extended sidelobe reduction filter, n taps. (F) Filter F. High-pass extended sidelobes reduction filter, n taps. (G) Filter G.Delay-line differentiator.
(F)-1 r 1
I- T-1-T -
( i) Imtpu lse response
_- (0) - 2 l(o)
( i i) Out put
f-I~~~~~~~~-2~ ~ ~~~t 1 12
_@92f 0 0 i1 (1-2) %-2f
l_T-. |T _l T_
( i) Impulse response
I.'-v --i
- f ', ( o ) b 2 &11- -a ( o) -f b (o)
U) f)utput
-2 -1
(ii) Output
¢, i1 1-I +k 2
1)rI a opo+kos
6 1 1-
( i) Imlpulse response
1-k)( a) - k(l-k)IP(o)IT
1 -i 1-
+k n+2 k 1_a
-1 U_k U-k kn-l
-k -k7
(i) impulse response
A'(() n sidelobes-1261-- (..) (ok'(1-k)W(o)
(ii) Output
0018-9251/80/0300-0240 $00.75 1980 IEEE
(G)
-I 1- I
I 1
(i) Impulse Response
A@((-
can be shown to provide optimal noise immunity for agiven compression ratio, however their use is not crucialfor good performance in practice. This is further discussedin Section III.
A. Urkowitz "Optimum"Filter. The filter impulseresponse and output are shown in Fig. 3(A). The filtercan be realized using the circuit arrangement of Fig. 4(A).The first part of the circuit is called a pulse aperture cor-rector or delay line differentiator and the second partis called a second blip eliminator. This filter maximizes.the clutter improvement ratio I but ignores the SNRas can be seen from Table I. This filter could not be usedin practice because of the poor SNR and because it is un-stable when the input signal is corrupted by additive noise.It is useful for theoretical comparisons however.
IEEE TRANSACTION ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. AES-16, NO. 2 MARCH 1980
I SI-
(D)
(A)
(B)
(C)
4£
qL -
-2£I
240

(A)
(B)
_~~~~~~~~~~
PTE(l
L SUBEL __-___ J
k Gain k < 1
_DELAY
(C)
(D)
(E)
PFE(l 1 TPE DELAY LINE j TPE DELAY LINE|n2T1APSIT
I +I(F)
(G)
Fig. 4. (A) Filter A. Urkowitz filter. (B) Filter B. ModifiedUrkowitz filter (MUF). (C) Filter C. Truncated modifiled Urkowitzfilter (TMUF). (D) Filter D. Symmetrical truncated modifiedUrkowitz filter (STMUF). (E) Filter E. Extended sidelobe:reduction filter. (F) Filter F. High-pass extended sidelobereduction filter, n taps. (G) Filter G. Delay-line differentiator,see Fig. 2(B).
B Modified. Urkowitz Filter. In order to improvethe stability properties of the Urkowitz filter, gain k < 1could be placed in the feedback loop as shown in Fig.4(B). If this is done the filter impulse response and out-put now change as shown in Fig. 3(B). Output sidelobes
now appear and the clutter improvement factor is re-duced; see Table I. This filter appears to be useful. Itis easy to build but we are unable to find any mentionof it in the literature.
C Truncated Modified Urkowitz Filter. In this casethe impulse response of filter B is truncated to n taps toimprove the SNR; see Fig. 3(C) and Table I. The filtercould be realized using a finite tapped delay-line structureas in Fig. 4(C). Although more expensive to construct,this fiter has no stability problems and for the samesidelobe ratio and resolution performance as filter B itprovides similar (slightly better) performance in noiseand in clutter.
D. Symmetrical Truncated Modified Urkowitz Filter.Even greater clutter and noise performance (for the same6/T and e) can be achieved with the symmetrical-impulseresponse shown in Fig. 3(D). The filter realization isslightly more complex however; see Fig. 4(D).
E Extended Sidelobe Reduction Filter. Filters B,C, and D are all approximations and modifications offilter A. Filter E is an optimal filter based on a totallydifferent performance index. Recall that filter A wasdesigned to maximize the output signal-to-clutter ratiowhile detection in noise, sidelobe structure, and resolu-tion were not directly incorporated in the problem for-mulation. Filter E, on the other hand, is the filter whichmaximizes\ probability of detection when the sideloberatio e and the compression ratio S/T are specified. Fortheoretical aspects of this problem see [8-101. The im-pulse response and output are shown in Fig. 3(E) andone possible realization is given in Fig. 4(E).
F High-Pass Extended Sidelobe Reduction Filter. Justas various approximations of filter A were studied, herewe examine an approximation of filter E, differing inthat the Fourier transform has a zero when the frequencyis zero. The result is a higher e and low SNR but superiorL See Figs. 3(F), 4(F), and Table I for details.
G. Delay-Line Differentiator. Finally we considerthe well-known and widely used circuits of Figs. 3(G),4(G), and Table I. It can be thought of as being approxi-mately equivalent to the fast time constant RC differenti-ator [2] . It has a poor sidelobe structure but it is easyto build and is only 3 dB worse in clutter than the opti-mum Urkowitz filter (see Table I).
H Short-Pulse Transmitter. For the purposes of com-parison, Table I presents the performance propertiesobtained by transmitting a short rectangular pulse oflength 26 and passing it through a matched filter uponreception. It will be seen that the SPT offers optimumperformance on short-range targets; however, as discussedin the introduction, long-range detection is compromised.
0018-9251/80/0300-0241 $00.75 i) 1980 IEEE
CORRESPONDENCE 241
0.

TABLE 1Comparison of Filter Characteristics
_ SNR (S/C)ot_ J0Filter SNR I= E-ttp(O)(SNR)MF (S/C)in max t(p
A 0 3 Tld 02
B ~ ~~~ ~k/
2
1 - k' /B 61T 1k T/6 1- k2 2 1 - k2+ (1- k)2
1 k2 31-k2nC _______ d/ 3 1-k2 T/d max(I - k, k' ')n taps 2[1 k2- 2 1 - k2 + (1 - k)2 (1 - k2-+2)
D d/T 3 2(1 - k2) T/ - k kn2-n taps 1 - kn 2 2(1 -k2) + (1 - k)2 (1 - k-) 2 2
12 1 1E d/T T/6
n taps [2n + 3 + 1/n3 2 + T 2n3 4n6
6 3 n 1F 6/T T/6(n taps) (n + 2/n + 3] 2 n + 1 n
G 61T T/6 12 4
6 3H SNR= I= T/6 0
T 2
3. Comparisons
The comparison of clutter improvement ratios ispresented in Table I and summarized graphically in Fig. 5.The clear superiority of filters E and F with respect to SNRis demonstrated. Further, for small e, all filters (exceptG) approach the optimal I of the Urkowitz filter. Notealso that all the filters suffer from a serious SNR lossas 6/T becomes small. The short-pulse transmitter witha matched-fi'lter receiver (H) is clearly superior on all cri-teria, having no sidelobes, optimal I, and optimal SNR.Table II contains a set of numerical comparisons for asidelobe-to-peak ratio e = 26 dB (1/20).
4. Equivalences
It is interesting to note that all the filters discussedhere (except G) are equivalent to the Urkowitz filterif we set k = 1 or e = 0. Further equivalences are 1)Filters B and C with k = 0 are the same as G; 2) FilterD with k = 0 and n = 2 is the same as F with n = 2; also,D with n = 4 and k = j is the same as F with n = 4.
III. Practical Considerations and Conclusions
Possible circuit realizations of the filters are givenin Fig. 4. Notice that they all use the basic bandlimiting
0018-9251/80/0300-0242 $00.75 i 1980 IEEE
element shown in Fig. 2. This bandlimiting element pro-vides optimal signal-to-noise ratio and is therefore usefulin comparisons. In practice, however, reasonable approxi-mations to this impulse response are quite satisfactory,giving a marginal reduction in SNR and having negligibleeffect on e or L Fig. 6 gives some measure of the com-plexity of the filters when a certain sidelobe level is re-quired, and it can be seen that if we ignore the recursivestructure, then filters B, E, and F are seen to be superior.For example, with e = 1/20, E requires a delay line onlylOT long, yet near-optimal I is achieved with an enormousimprovement in SNR. Filter F comes second, needinga 20T long delay line, but suffers a large SNR loss (0of the E ) for a marginal increase in I. From a complex-ity point of view, B is far superior to any nonrecursivefilter of the same performance.
The symmetrical impulse-response filters D, E, and Fcan be simplified by providing only one set of delay-linetaps as shown in Fig. 7. Obviously there are many otherstructures that would have the required impulse-responsefunctions but these will not be discussed or comparedhere.
It is important to observe that the resolution improve-ment properties of all the filters discussed in this paperrely critically upon the fact that the transmitter pulserise and fall times are small compared with 6.
IEEE TRANSACTION ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. AES-16, NO. 2 MARCH 1980242

TABLE 11Numerical comparisons for e= 26 dB (0.05)
Filter SNR I e
A 0 1.T5/6 0
B 0.04875 6/T 1.4625 T/I 0.05k = 0.95
Cn = 58 0.04888 6/T 1.4626 T/8 0.05k = 0.95
Dk = 0.9 0.1915 6/T 1.4618 T/I 0.05n = 46
E 0.4545 6/T T 106; 1.0909 T/6 0.05n = 10 T-4 6; 2.3043 T/6
F 0.2586 6/T 1.4286 T/6 0.05n = 20
G 0.5 6/T 0.75 T/6 1.0
H 1.0 8/T 1.5 T/6 0
nA
delalinetaps
Fig. 6. Filter complexity comparisons.
Fig. 7. Alternative structure for filter F.
rAPPED DEOTAY LTNn/2 TAPS
SNR/ (S/T)
1. 5_
0.5
I(T/6)
3/2-
3/4
? S~ ~ ~ ~ ~ ~ ~ ~~ ---L
BF
. ., f U10 20 1
(A)
A
STMUF BIC,
TMUF
20 1
(B)
Fig. 5. Filter performance characteristics. (A) Detection in noise.(B) Detection in clutter.
R.J. EVANS
Dept; of Electrical EngineeringUniversity of New CastleNSW 2308
T.E. FORTMANN
Bolt Beranek and Newman, Inc.50 Moulton StreetCambridge, MA 02138
References
[1] H. Urkowitz, "Detection of small signals in clutter," J.Appl. Phys., vol. 24, pp. 1024-1031, 1953.
[2] J. Croney, "Clutter on radar displays," Wireless Eng.,pp. 83-96, Apr. 1956.
(3] V. Hansen, "Studies of logarithmic radar receiver usingpulse length discriminations," IEEE Trans. Aerosp. Electron.Syst., vol. AES-1, pp. 246-253, Dec. 1965.
(4] V. Hansen, "Detection performanceof cell averaging log-CFAR receiver," IEEE Trans. Aerosp. Electron. Syst.,vol. AES-8, pp. 648.652, Sept. 1972.
[5] Lawson and G. Uhlenbeck, Threshold Signals. New York:Dover, 1950.
(6] M. Skolnik, Introduction to Radar Systems. New York:McGraw-Hill, 1962.
[7] M. Skolnik, Ed., Radar Handbook. New York: McGraw-Hill, 1970.
[8] R.J. Evans and T.E. Fortmann, "Optimal resolution of rec-tangular pulses in noise," IEEE Trans Aerosp. ElectronSyst, vol. AES-1l, pp. 372-379, May 1975.
[9] R.J. Evans, T.E. Fortmann, and A. Cantoni, "Envelope-constrained filters Part I: Theory and applications,"IEEETrans. Inform. Theory, pp. 421-434, July 1977.
[101 R.J. Evans, A. Cantoni, and T.E. Fortmann, "Envelope-constrained filters Part II: Adaptive structures," IEEE TranxInform. Theory, pp. 435444, July 1977.
0018-9251/80/0300-0243 $00.75 i 1980 IEEE
CORRESPONDENCE
_! DL,~~~~~~~~~
..
243

[11] W. Schrader, "Radar technology applied to air traffic con-trol," IEEE Trans. Commun. Tech., vol. COM-2 1, pp.591-605, May 1973.
[121 C. Muche, L. Cartledge, et al., "New techniques appliedto air traffic control radars," Proc. IEEE, vol. 62, pp.716-723, June 1974.
[13] A. Rihaczek, Principles ofHigh Resolution Radar. NewYork: McGraw-Hill, 1969.
[14] F. Fay, J. Clarke, and R. Peters, "Wiebull distributionapplied to sea clutter," presented at Radar '77, Internat.Radar Conf., London.
[15] R. Nitzberg, "Constant-false-alarm-rate signal processorsfor several types of interference," IEEE Trans. Aerosp.Electron. Syst., vol. AES-8, pp. 27-34, Jan. 1972.
[16] G.B. Goldstein, "False alarm regulation in log-normal andWiebull clutter," IEEE Trans. Aerosp. Electron. Syst.,vol. AES-9, pp. 84-92, Jan. 1973.
[171 G.V. Trunk and S.F. George, "Detection of targets in non-Gaussion sea clutter," IEEE Trans. Aerosp. Electron. Syst.,vol. AES-6, pp. 620-628, Sept. 1970.
[181 H. Finn and R. Johnson, "Adaptive detection mode withthreshold control as a function of spatially sampled clut-ter-level estimates," RCA Rev., vol. 30, pp. 414465,Sept. 1968.
[191 R. Nathanson, Radar Design Principles. New York:McGraw-Hill, 1969.
Student engineers would benefit from the study ofthe development of complex, widely used systems andthe divergence of the competitive technologies. As anexample, the early German versions of the radar equationconsidered the target as a specular reflector, while in Britainit was treated as a X/2 dipole, leading in the one case tothe mobile Freya, and in the other to the gargantuan CH.
I am at present preparing a short monograph, intendedfor beginning graduate students, on the engineering deci-sions which influenced the design of radar systems invarious countries. I would be grateful to any Transactionsreaders who contribute material dealing with the chro-nology of operational systems in use prior to 1945.
HAROLD W. SHIPTON
Biomedical Computer LaboratoryWashington University700 South Euclid AvenueSt. Louis, MO 63110
References
Radar History: The Need for Objectivity
[1] U. Tiberio, "Monostatic radar," IEEE Trans Aerosp.Electron. Syst., vol. AES-15, pp. 733-735, Sept. 1979.
[2] R.L. Page, "Some historical data conerning the first Italiannaval radars," IEEE Trans. Aerosp. Electron. Syst., vol. AES-1 3,pp. 557-571, Sept. 1977.
Range and Bearing Estimation in Passive SonarAbstract
The shortcomings of sources of historical accounts of radar are
discussed. It is believed that an objective account of its techno-logical evolution would be of benefit to students presently enter-ing aerospace engineering.
Dr. Tiberio's [1] appeal for an objective history ofradar is apt and timely. Political considerations, theneed for security and interallied rivalries have combinedto prevent the production of comparative accounts ofdevelopments before and during World War II althoughsuch would be of great archival value.
Dr. Page's 1977 paper [2] is not free from historicalerrors. His statement that the multitube generator "builtin 1941 was certainly the first radar generator to producepulses of 1 MW" is a case in point. The British CH atBawdsey was converted to 1 MW in early 1940 and powersexceeding 1.5 MW were in operational use by June of thatyear. Such errors are common in the literature; they areprobably not chauvinistic but stem from the long timewhich has elapsed and vast technological changes whichhave occurred since the granting of the first radar patent(to Hulsmeyer in 1904!).
Manuscript received November 20, 1979.
0018-9251/80/0300-0244 $00.75 ( 1980 IEEE
Abstract
Passive sonar systems are used for estimating the range and bear-ing of signal sources, such as ships or submarines. In this study,the Cramer-Rao bounds on estimation errors are used as measures
of the accuracy of the estimates. The bounds show how parameterssuch as observation time, signal bandwidth, signal-to-noise ratio,and array geometry can be chosen to obtain maximum accuracy.When the array geometry satisfies certain conditions, the boundfor range estimate is shown to be independent of the actual source
bearing and the bound for bearing estimate independent of boththe range and bearing of the source. It is also shown that thesame conditions on array geometry ensure that the range or bear-ing estimation accuracy is not degraded when tne other pammeteris not known.
I. Introduction
Passive sonar arrays are widely used to determine thelocation and identity of acoustic signal sources, such assubmarines and ships. The differences between the arrivaltimes of the signal at the various hydrophones of the
Manuscript received May 30, 1979; revised November 30, 1979.
IEEE TRANSACTION ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. AES-16, NO. 2 MARCH 1980244

![Diodes Based on Pyreno[4,5-d]imidazole-Anthracene Highly ... · The transient EL decay was tested by an Agilent 8114A pulse generator (100 V/2 A) to generate rectangular pulse voltages](https://img.dokumen.tips/doc/110x75/5f0ca1e97e708231d4365ec2/diodes-based-on-pyreno45-dimidazole-anthracene-highly-the-transient-el-decay.jpg)

![!LECTRICA]L ENGINEERING RESEARCH LABORATORYFigure la shows a pulse s(t) of 1-v amplitude and 1-sec duration appearing across a 1-ohm load resistor. A rectangular pulse is used because](https://img.dokumen.tips/doc/110x75/5ec6b4db7965b564650c5213/lectrical-engineering-research-laboratory-figure-la-shows-a-pulse-st-of-1-v.jpg)

























