Embed Size (px)
Citation preview
Image Stitching
Tamara BergCSE 590 Computational Photography
Many slides from Alyosha Efros & Derek Hoiem

How can we align two pictures?
• What about global matching?
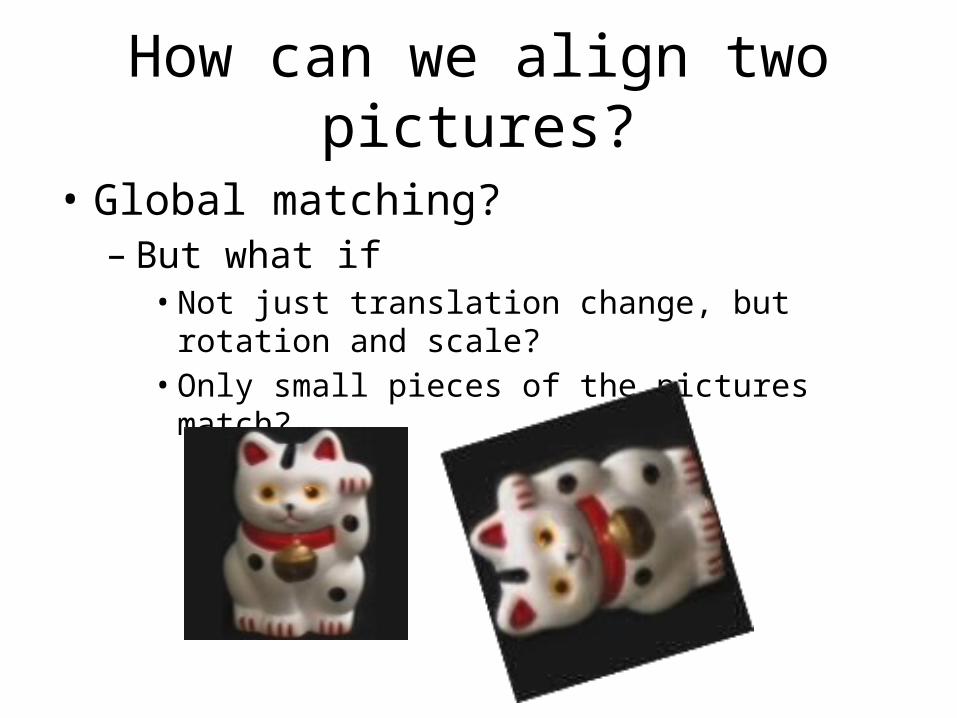
How can we align two pictures?
• Global matching?– But what if
• Not just translation change, but rotation and scale?• Only small pieces of the pictures match?
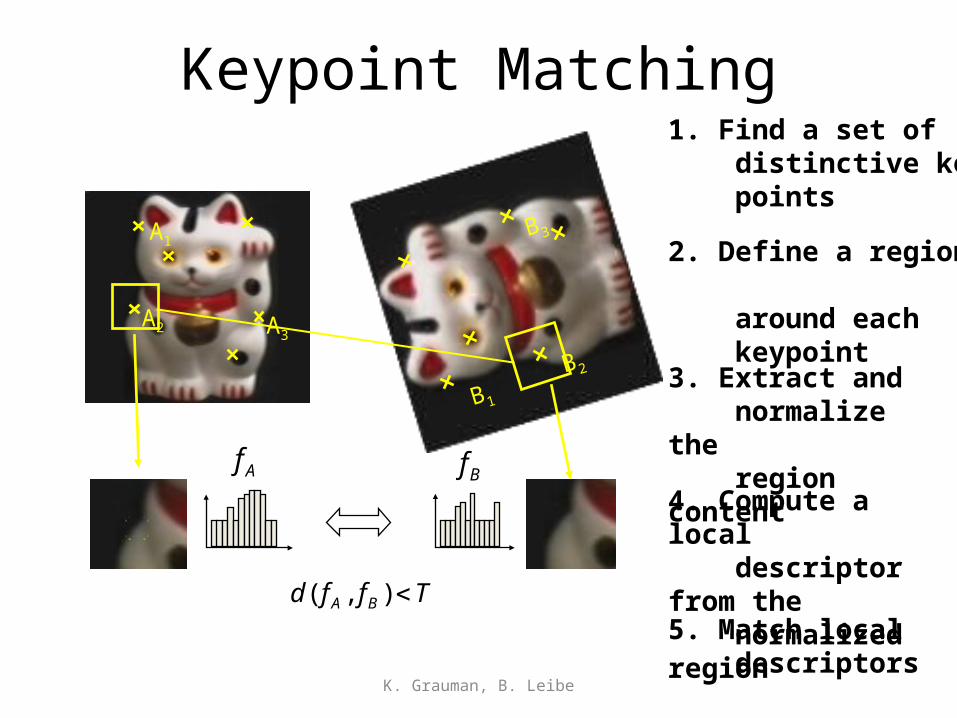
Keypoint Matching
K. Grauman, B. Leibe
Af Bf
B1
B2
B3A1
A2 A3
Tffd BA ),(
1. Find a set of distinctive key- points
3. Extract and normalize the region content
2. Define a region around each keypoint
4. Compute a local descriptor from the normalized region
5. Match local descriptors

Main challenges
• Change in position, scale, and rotation
• Change in viewpoint
• Occlusion
• Articulation, change in appearance
Question
• Why not just take every patch in the original image and find best match in second image?
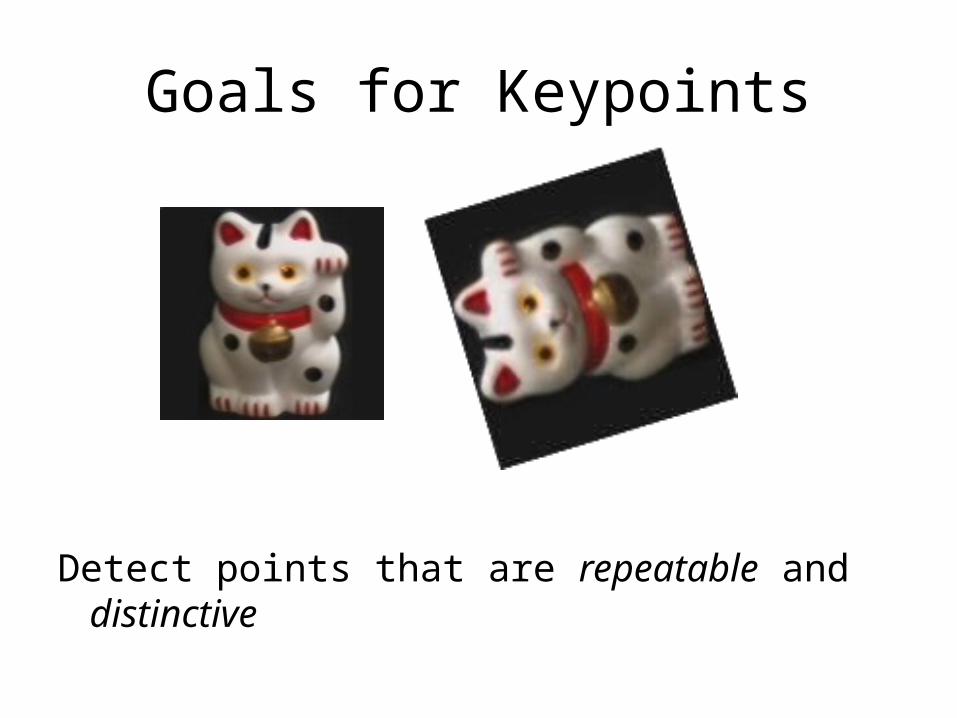
Goals for Keypoints
Detect points that are repeatable and distinctive
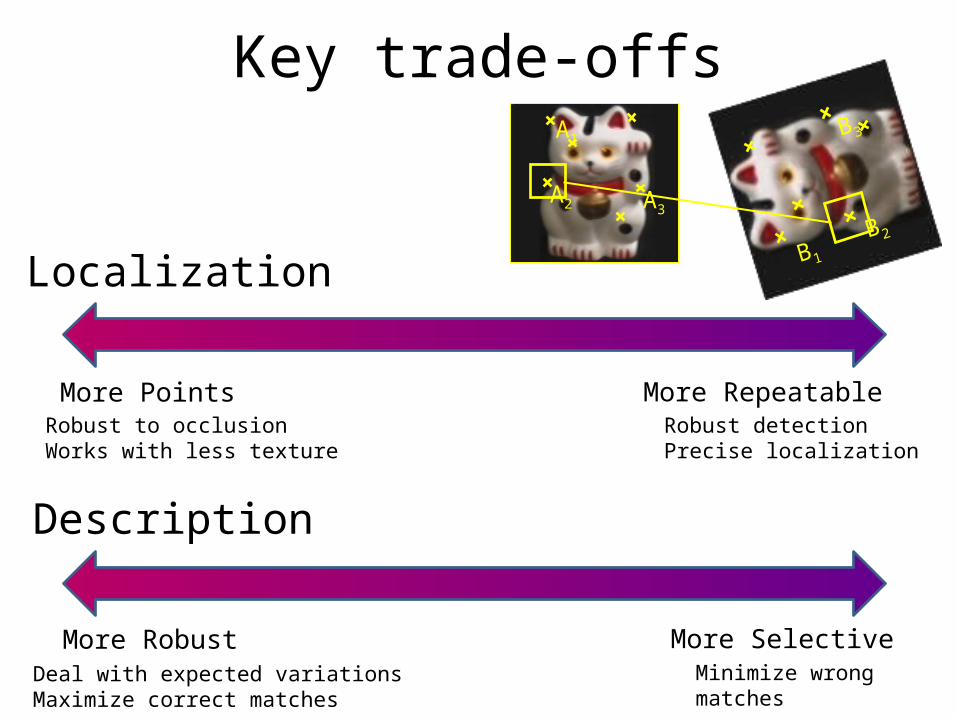
Key trade-offs
More Points More Repeatable
B1
B2
B3A1
A2 A3
Localization
More Robust More Selective
Description
Robust to occlusionWorks with less texture
Robust detectionPrecise localization
Deal with expected variationsMaximize correct matches
Minimize wrong matches

Keypoint Localization
• Goals: – Repeatable detection– Precise localization
K. Grauman, B. Leibe

Which patches are easier to match?
?
Choosing interest points
• If you wanted to meet a friend would you saya) “Let’s meet on campus.”b) “Let’s meet on Green street.”c) “Let’s meet at Green and Wright.”
• Or if you were in a secluded area:a) “Let’s meet in the Plains of Akbar.”b) “Let’s meet on the side of Mt. Doom.”c) “Let’s meet on top of Mt. Doom.”
Choosing interest points
• Corners– “Let’s meet at Green and Wright.”
• Peaks/Valleys – “Let’s meet on top of Mt. Doom.”

Many Existing Detectors Available
K. Grauman, B. Leibe
Hessian & Harris [Beaudet ‘78], [Harris ‘88]Laplacian, DoG [Lindeberg ‘98], [Lowe 1999]Harris-/Hessian-Laplace [Mikolajczyk & Schmid ‘01]Harris-/Hessian-Affine [Mikolajczyk & Schmid ‘04]EBR and IBR [Tuytelaars & Van Gool ‘04] MSER [Matas ‘02]Salient Regions [Kadir & Brady ‘01] Others…
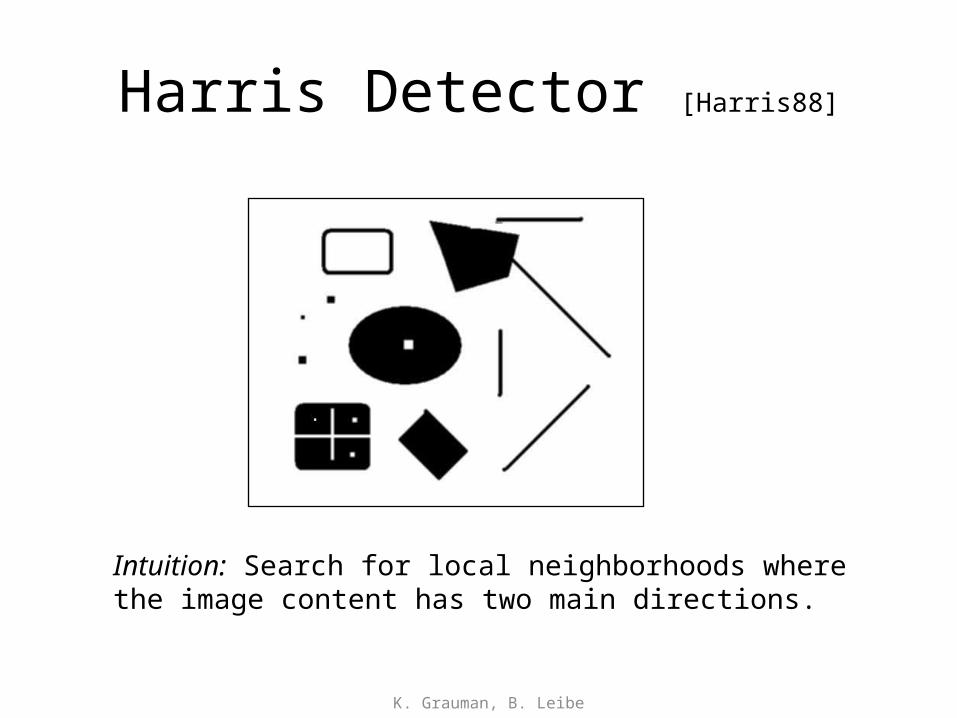
Harris Detector [Harris88]
K. Grauman, B. Leibe
Intuition: Search for local neighborhoods where the image content has two main directions.

Harris Detector – Responses [Harris88]
Effect: A very precise corner detector.
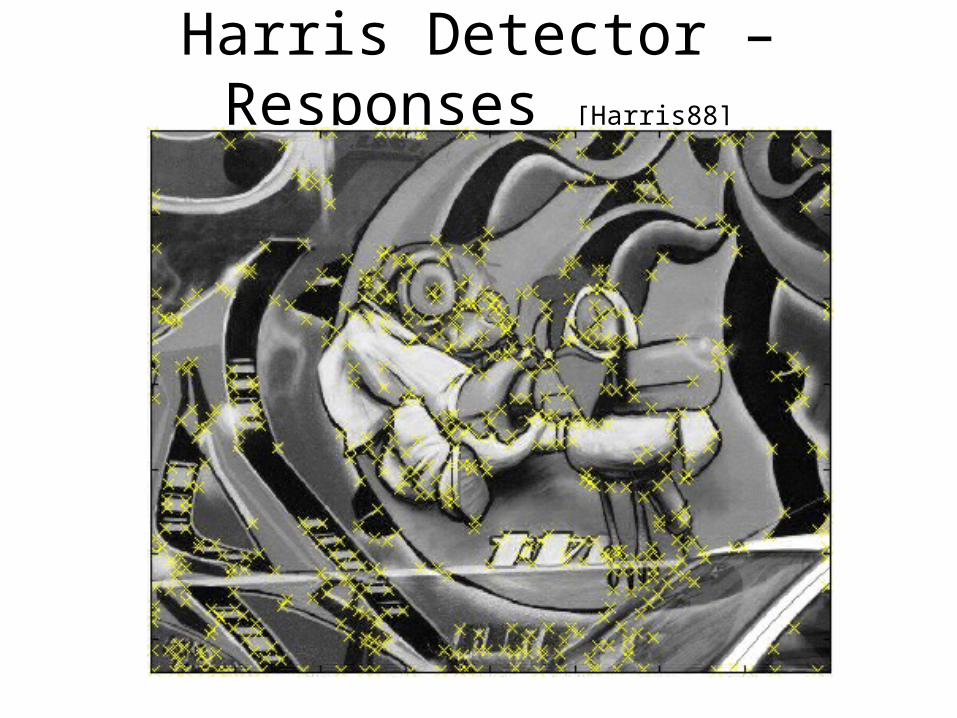
Harris Detector – Responses [Harris88]
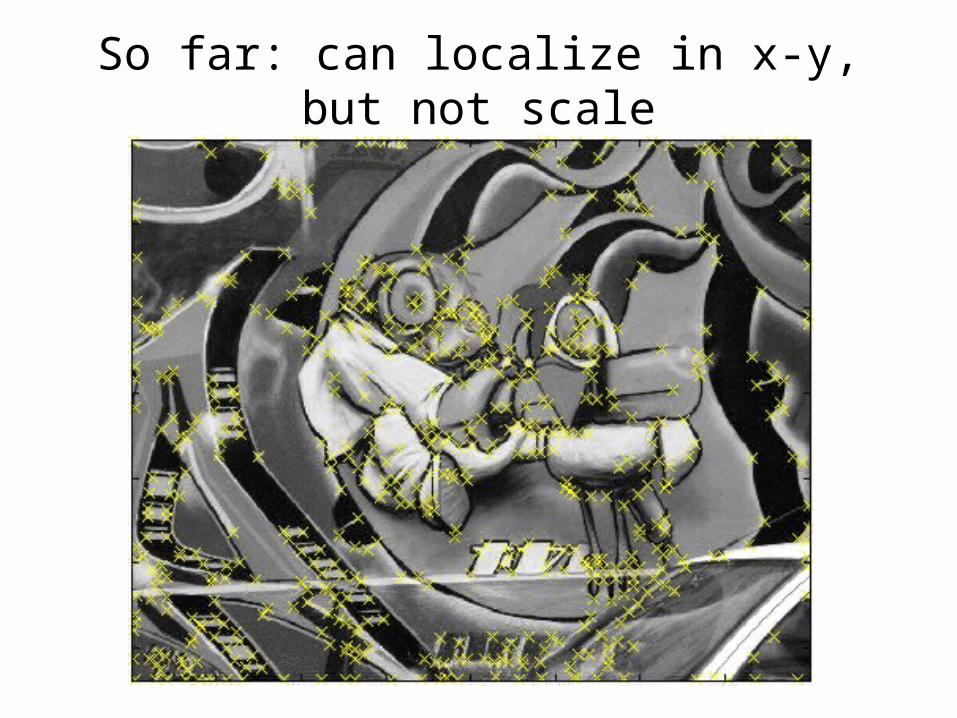
So far: can localize in x-y, but not scale

Automatic Scale Selection
K. Grauman, B. Leibe
)),(( )),((11
xIfxIfmm iiii
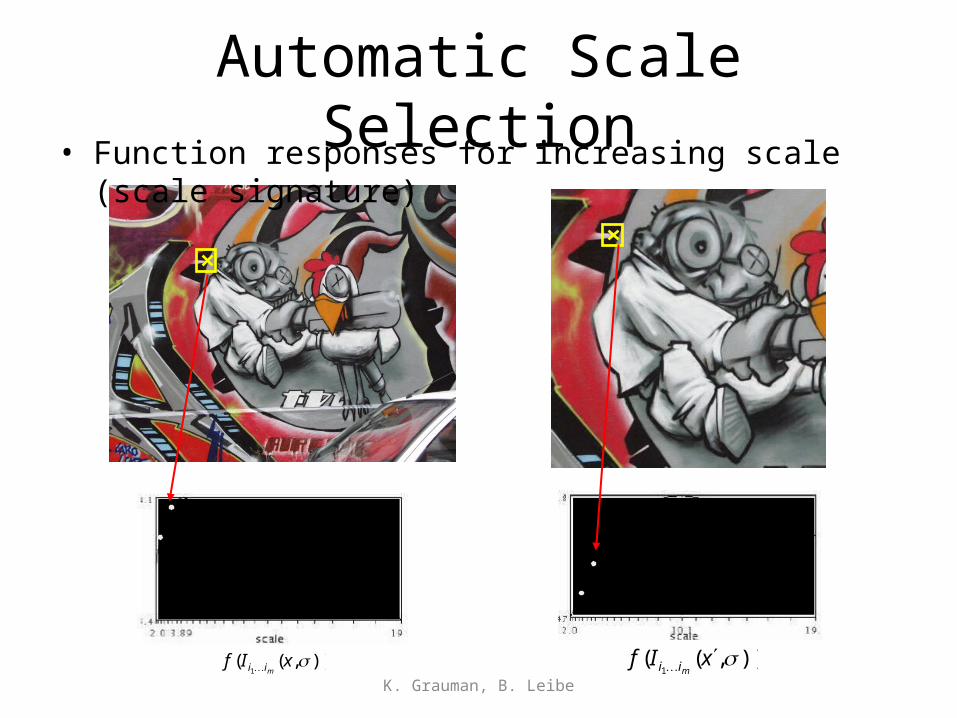
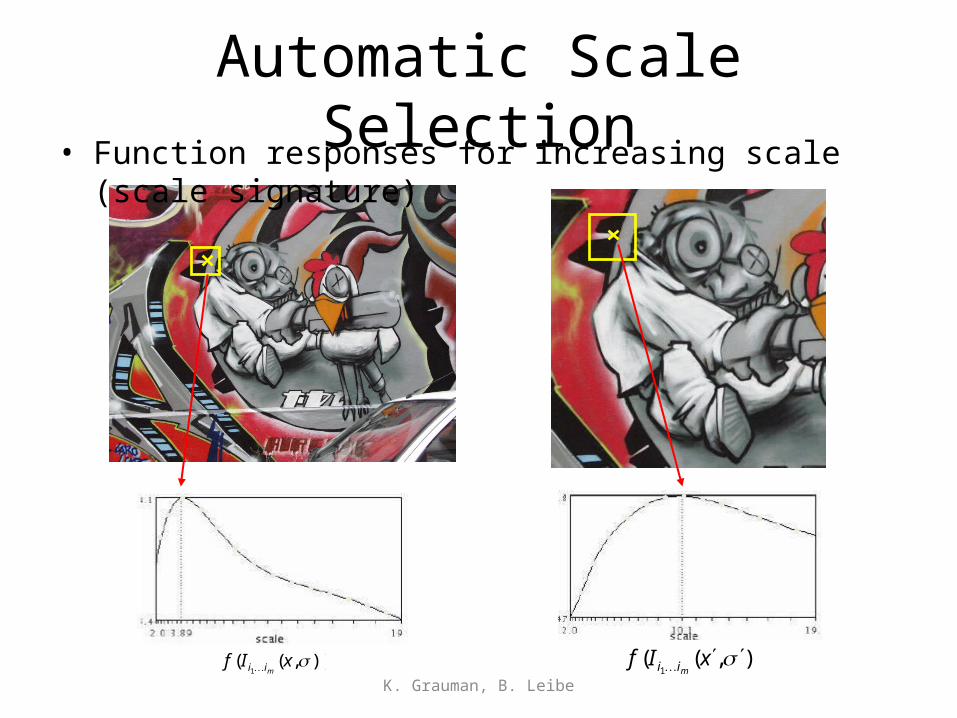
How to find corresponding patch sizes?
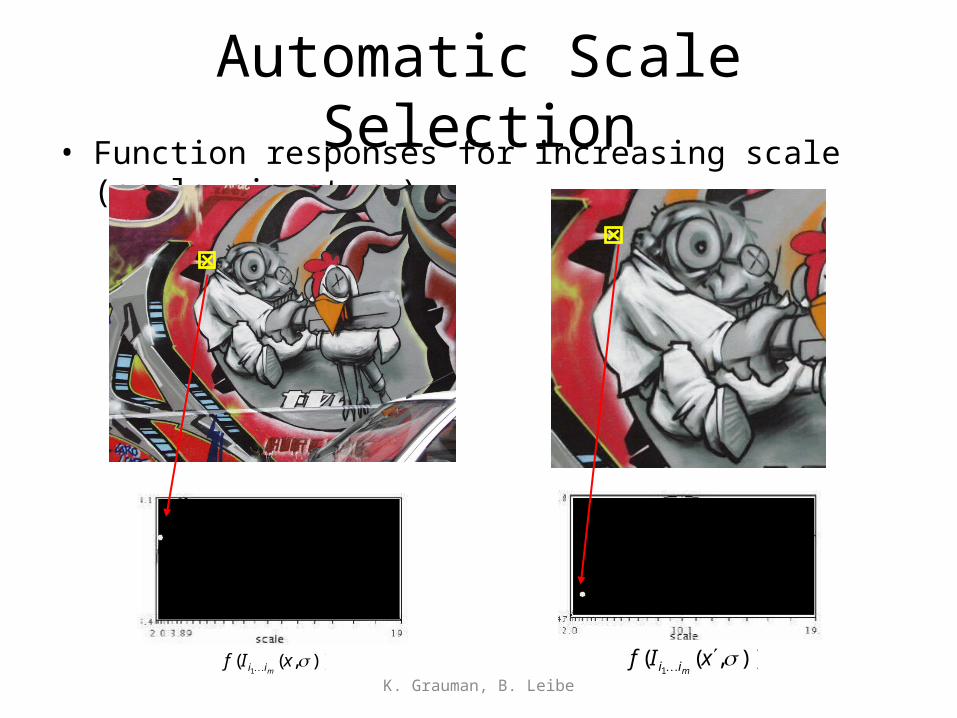
Automatic Scale Selection• Function responses for increasing scale (scale signature)
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
Automatic Scale Selection
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
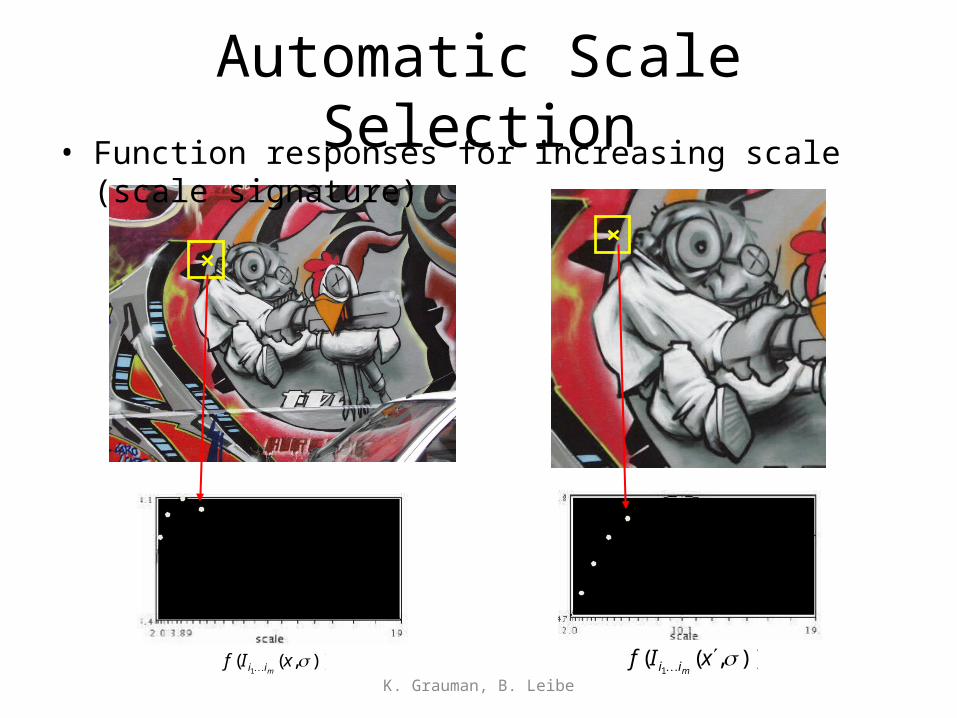
• Function responses for increasing scale (scale signature)

Automatic Scale Selection
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
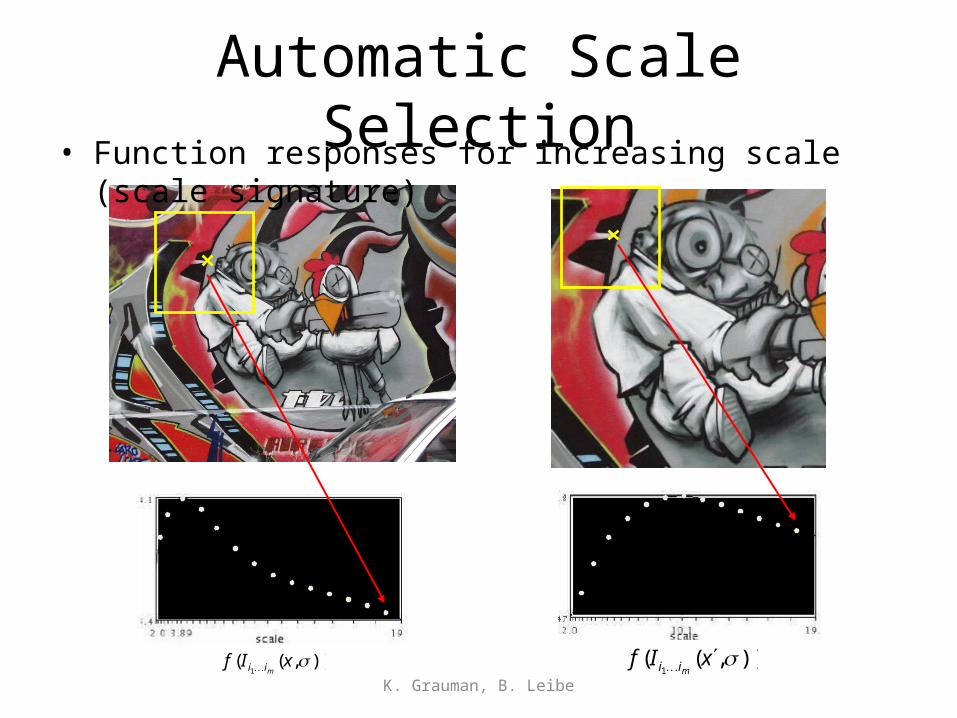
• Function responses for increasing scale (scale signature)
Automatic Scale Selection
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
• Function responses for increasing scale (scale signature)
Automatic Scale Selection
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
• Function responses for increasing scale (scale signature)
Automatic Scale Selection
K. Grauman, B. Leibe)),((
1xIf
mii )),((1
xIfmii
• Function responses for increasing scale (scale signature)
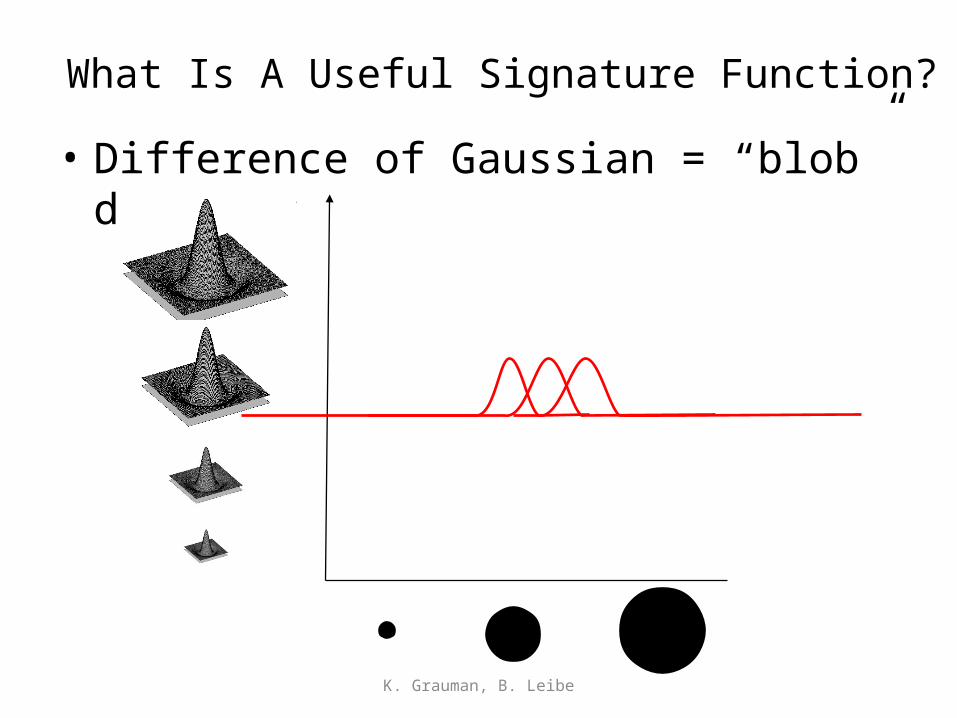
What Is A Useful Signature Function?
• Difference of Gaussian = “blob” detector
K. Grauman, B. Leibe
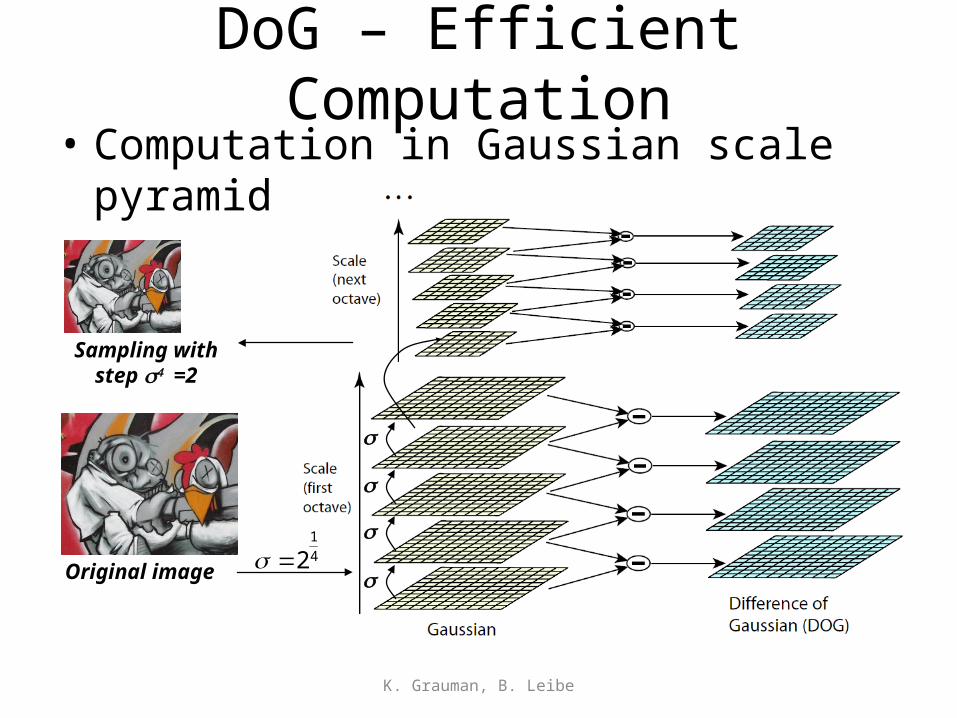
DoG – Efficient Computation• Computation in Gaussian scale pyramid
K. Grauman, B. Leibe
s
Original image 4
1
2
Sampling withstep s4 =2
s
s
s
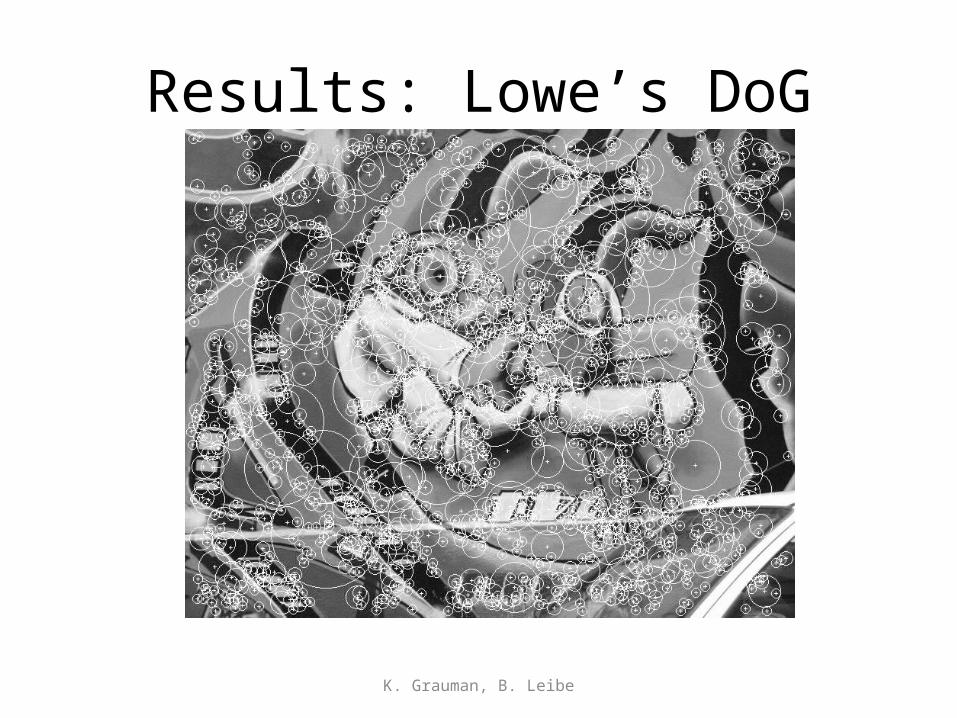
Results: Lowe’s DoG
K. Grauman, B. Leibe

T. Tuytelaars, B. Leibe
Orientation Normalization
• Compute orientation histogram• Select dominant orientation• Normalize: rotate to fixed orientation
0 2p
[Lowe, SIFT, 1999]
Available at a web site near you…
• For most local feature detectors, executables are available online:– http://robots.ox.ac.uk/~vgg/research/affine– http://www.cs.ubc.ca/~lowe/keypoints/– http://www.vision.ee.ethz.ch/~surf
K. Grauman, B. Leibe
How do we describe the keypoint?
Local Descriptors
• The ideal descriptor should be– Robust– Distinctive– Compact– Efficient
• Most available descriptors focus on edge/gradient information– Capture texture information– Color rarely used
K. Grauman, B. Leibe
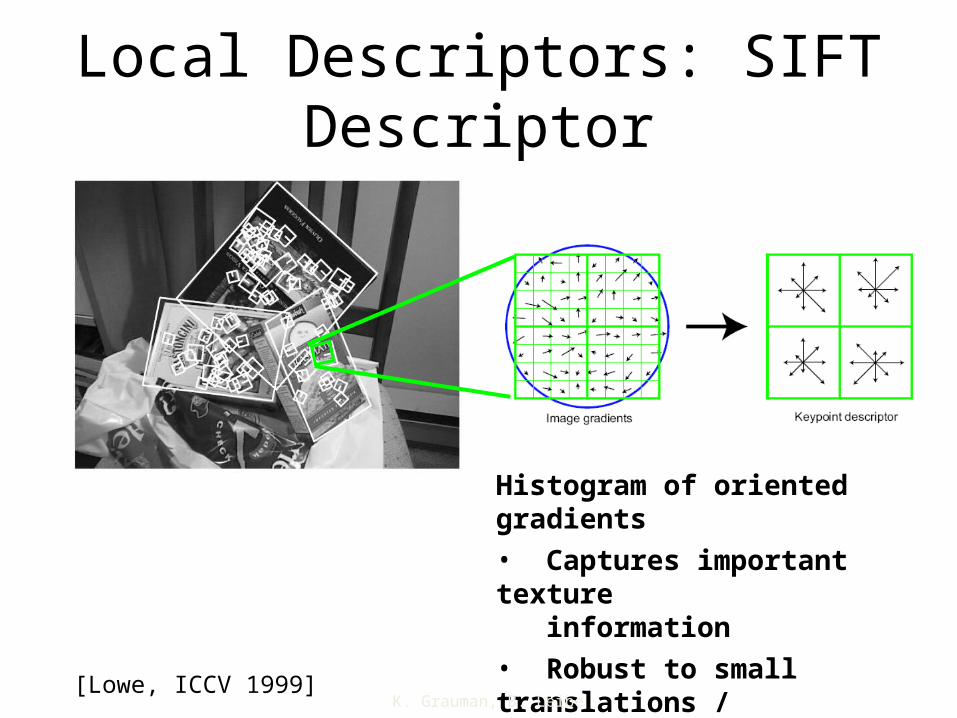
Local Descriptors: SIFT Descriptor
[Lowe, ICCV 1999]
Histogram of oriented gradients
• Captures important texture information
• Robust to small translations / affine deformations
K. Grauman, B. Leibe
What to use when?
Detectors• Harris gives very precise localization but doesn’t
predict scale– Good for some tracking applications
• DOG (difference of Gaussian) provides ok localization and scale– Good for multi-scale or long-range matching
Descriptors• SIFT: good general purpose descriptor
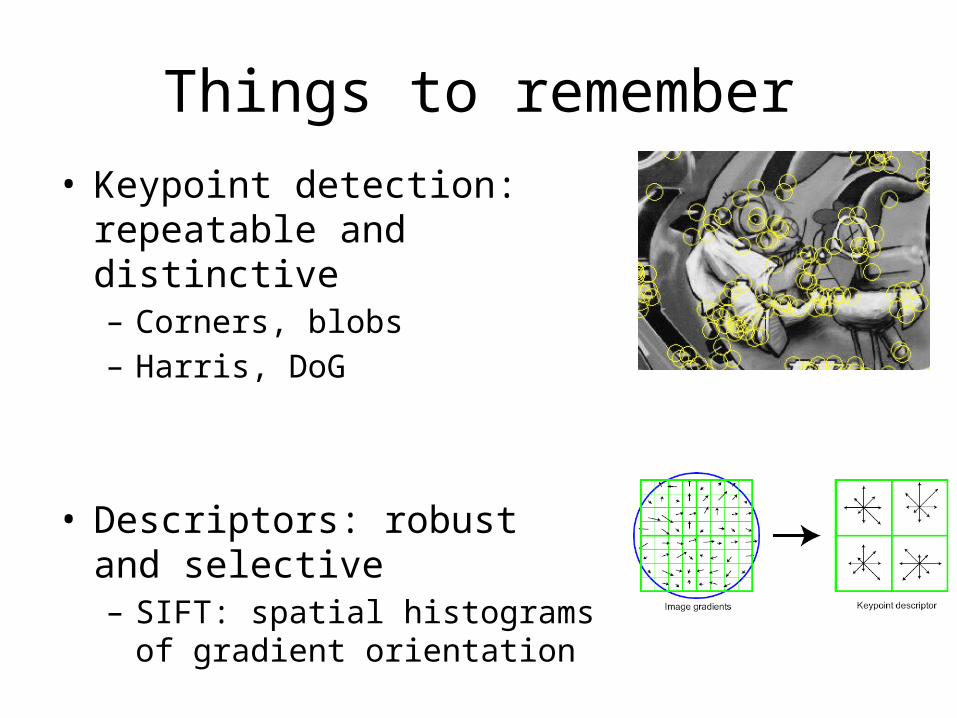
Things to remember• Keypoint detection: repeatable
and distinctive– Corners, blobs– Harris, DoG
• Descriptors: robust and selective– SIFT: spatial histograms of gradient
orientation
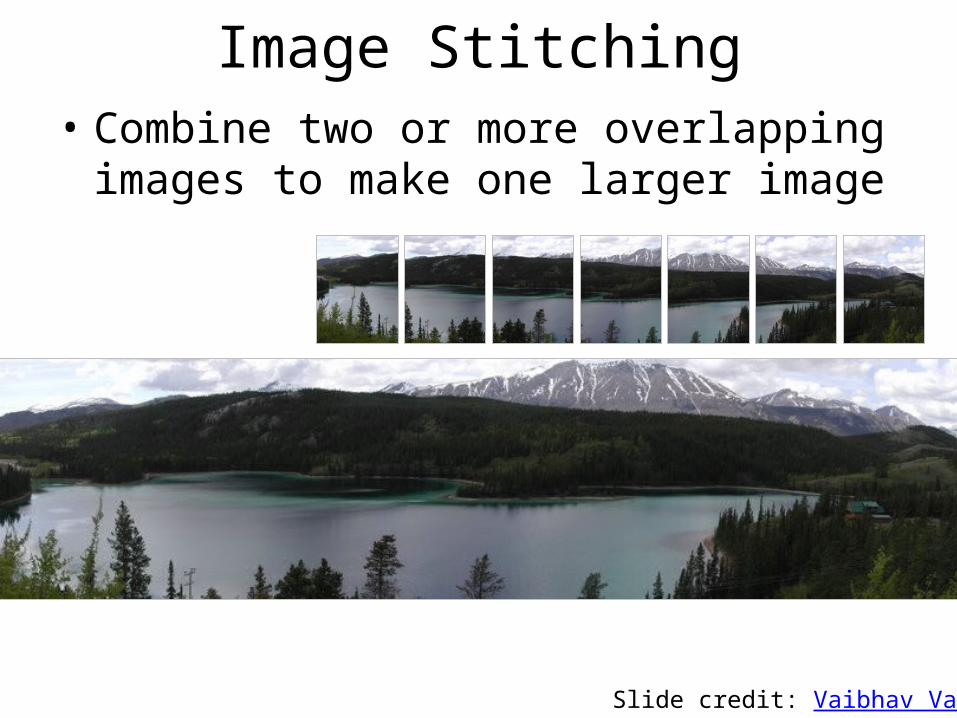
Image Stitching• Combine two or more overlapping images to
make one larger image
Add example
Slide credit: Vaibhav Vaish
Panoramic Imaging
• Higher resolution photographs, stitched from multiple images
• Capture scenes that cannot be captured in one frame
• Cheaply and easily achieve effects that used to cost a lot of money

Photo: Russell J. Hewett
Pike’s Peak Highway, CO
Nikon D70s, Tokina 12-24mm @ 16mm, f/22, 1/40s

Photo: Russell J. Hewett
Pike’s Peak Highway, CO
(See Photo On Web)

Photo: Russell J. Hewett
360 Degrees, Tripod Leveled
Nikon D70, Tokina 12-24mm @ 12mm, f/8, 1/125s

Photo: Russell J. Hewett
Howth, Ireland
(See Photo On Web)
Capturing Panoramic Images
• Tripod vs Handheld• Help from modern cameras• Leveling tripod• Or wing it
• Exposure• Consistent exposure between frames• Gives smooth transitions• Manual exposure
• Caution• Distortion in lens (Pin Cushion, Barrel, and Fisheye)• Motion in scene
• Image Sequence• Requires a reasonable amount of overlap (at least 15-30%)• Enough to overcome lens distortion
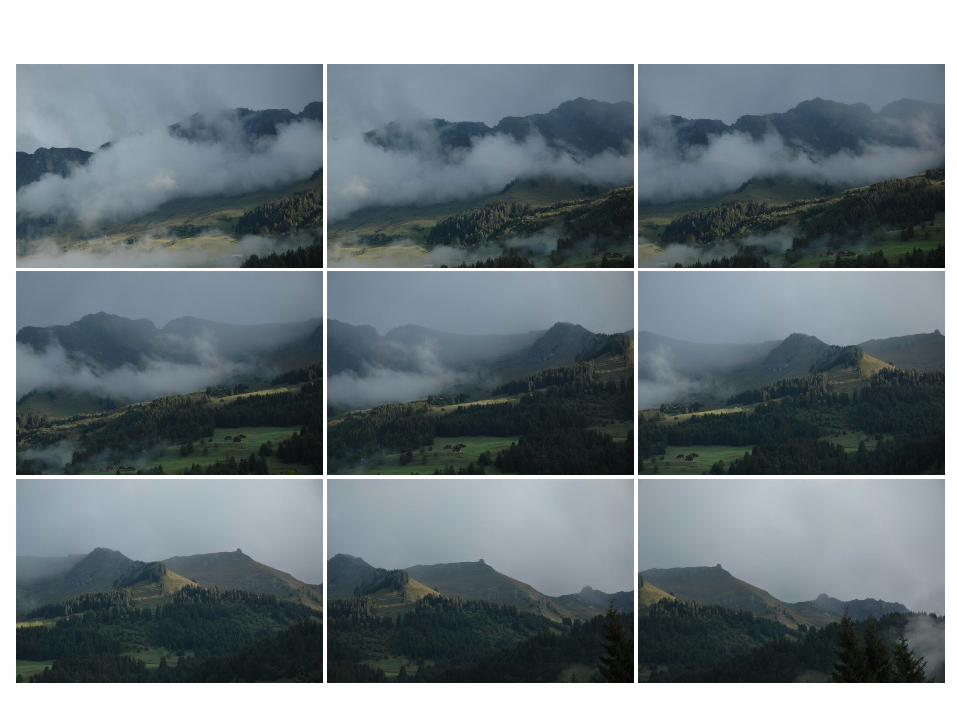
Photo: Russell J. Hewett
Handheld Camera
Nikon D70s, Nikon 18-70mm @ 70mm, f/6.3, 1/200s
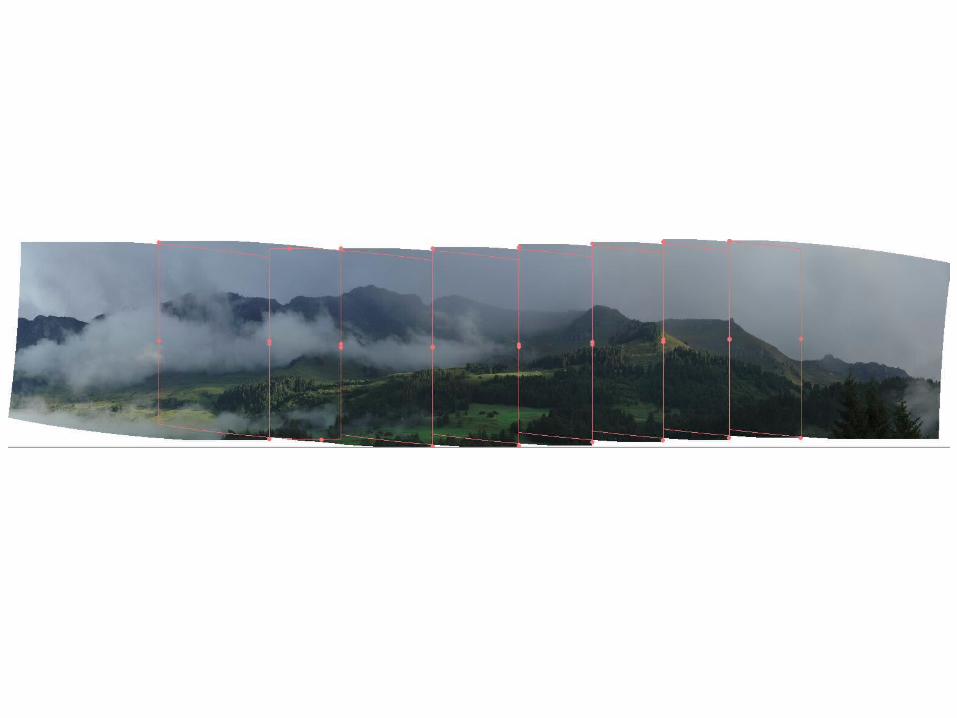
Photo: Russell J. Hewett
Handheld Camera

Photo: Russell J. Hewett
Les Diablerets, Switzerland
(See Photo On Web)

Photo: Russell J. Hewett & Bowen Lee
Macro
Nikon D70s, Tamron 90mm Micro @ 90mm, f/10, 15s

Photo: Russell J. Hewett & Bowen Lee
Side of Laptop
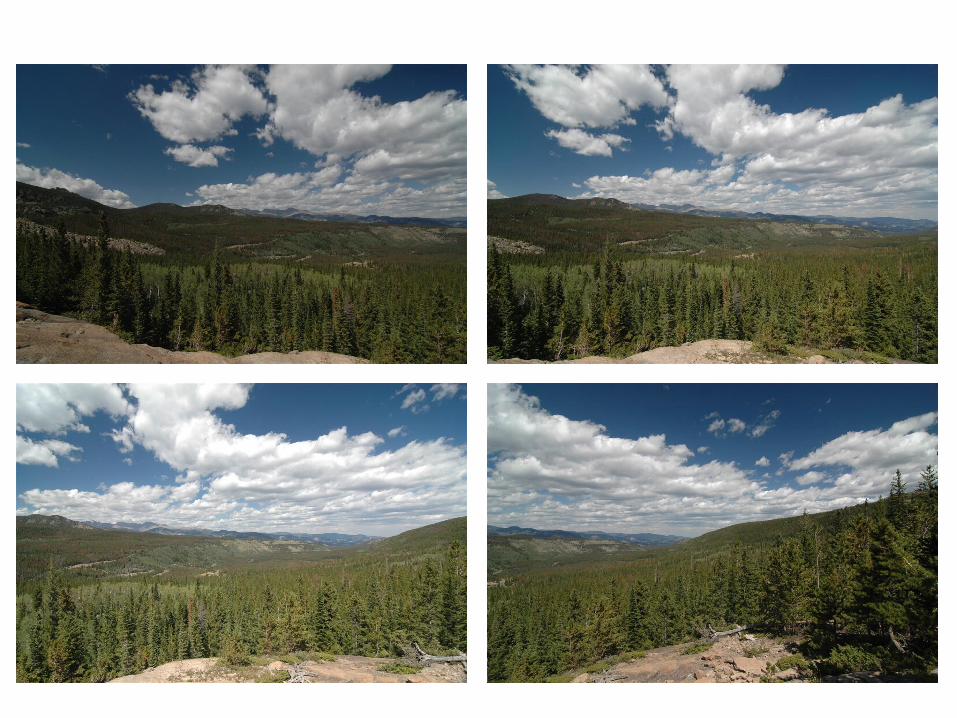
Photo: Russell J. Hewett
Ghosting and Variable Intensity
Nikon D70s, Tokina 12-24mm @ 12mm, f/8, 1/400s
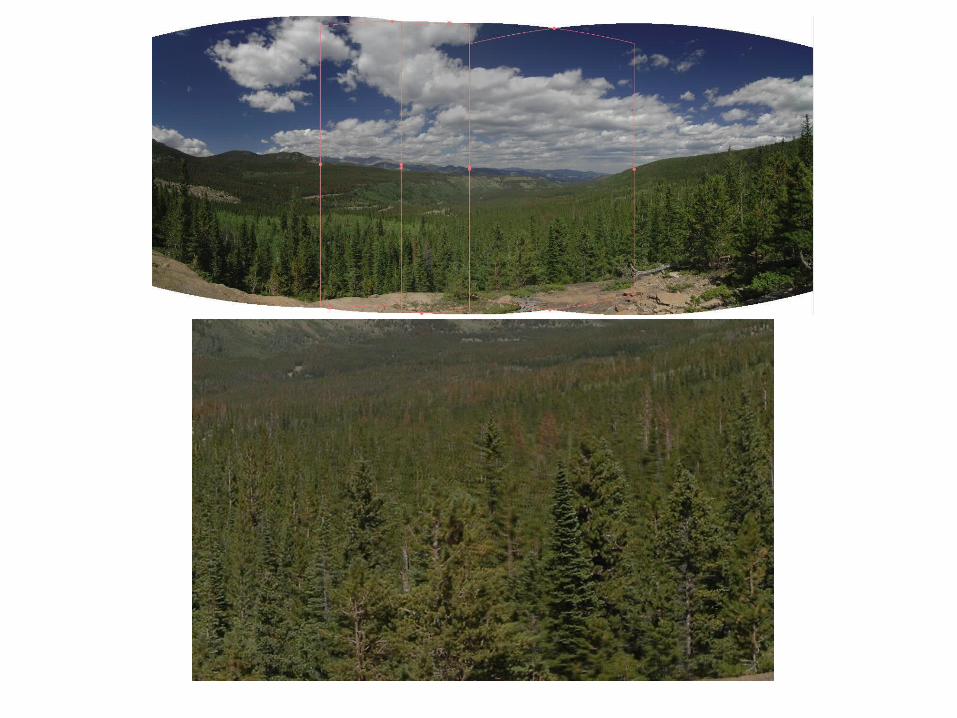
Photo: Russell J. Hewett

Photo: Bowen Lee
Ghosting From Motion
Nikon e4100 P&S
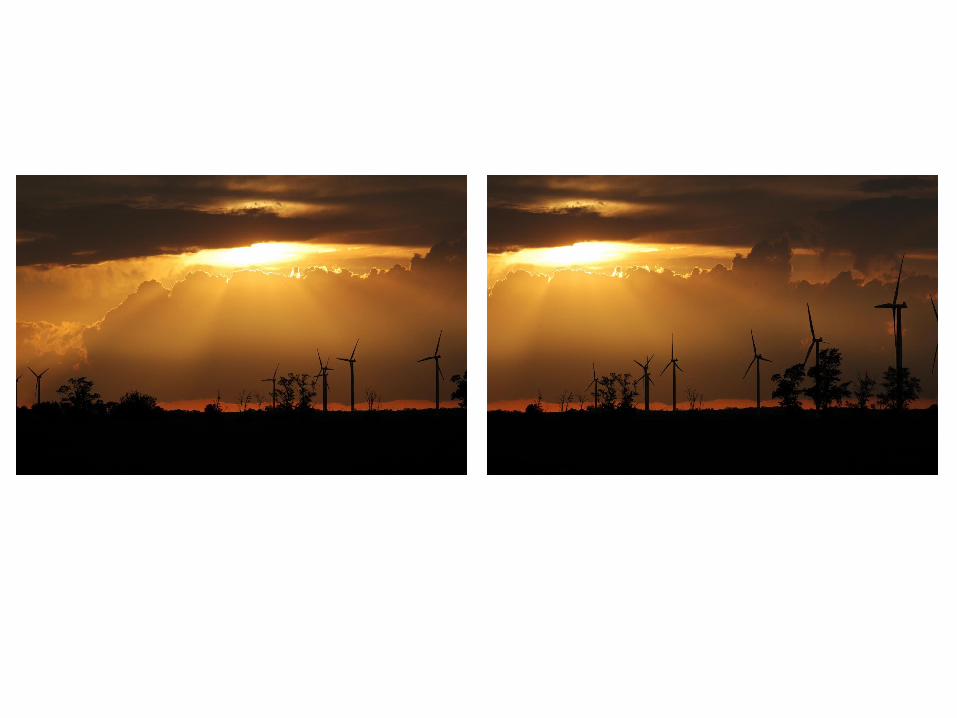
Photo: Russell J. Hewett Nikon D70, Nikon 70-210mm @ 135mm, f/11, 1/320s
Motion Between Frames
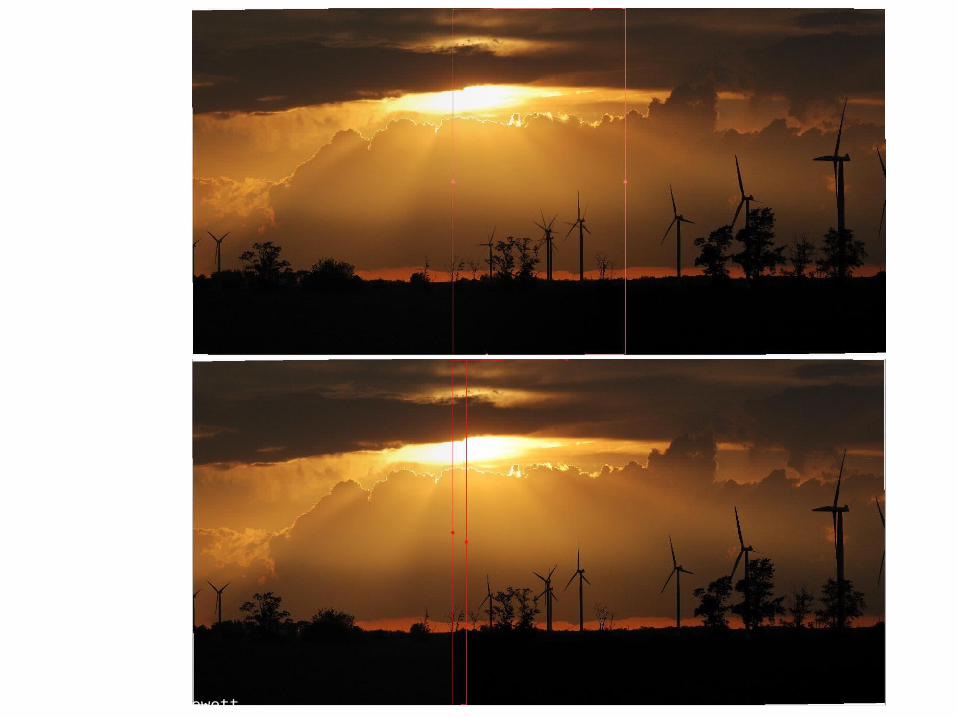
Photo: Russell J. Hewett

Photo: Russell J. Hewett
Gibson City, IL
(See Photo On Web)

Photo: Russell J. Hewett
Mount Blanca, CO
Nikon D70s, Tokina 12-24mm @ 12mm, f/22, 1/50s

Photo: Russell J. Hewett
Mount Blanca, CO
(See Photo On Web)

Image Stitching Algorithm Overview
1. Detect keypoints2. Match keypoints3. Estimate homography with matched
keypoints (using RANSAC)4. Project onto a surface and blend
Image Stitching Algorithm Overview
1. Detect keypoints (e.g., SIFT)2. Match keypoints

Computing homography
If we have 4 matched points we can compute homography H
Hxx '
987
654
321
hhh
hhh
hhh
H

Computing homography
Assume we have matched points with outliers: How do we compute homography H?
Automatic Homography Estimation with RANSAC
RANSAC: RANdom SAmple ConsensusScenario: We’ve got way more matched points than needed to fit the parameters, but we’re not sure which are correct
RANSAC Algorithm• Repeat N times
1. Randomly select a sample– Select just enough points to recover the parameters (4)2. Fit the model with random sample
3. See how many other points agree• Best estimate is one with most agreement
– can use agreeing points to refine estimate

Automatic Image Stitching
1. Compute interest points on each image
2. Find candidate matches
3. Estimate homography H using matched points and RANSAC
4. Project each image onto the same surface and blend
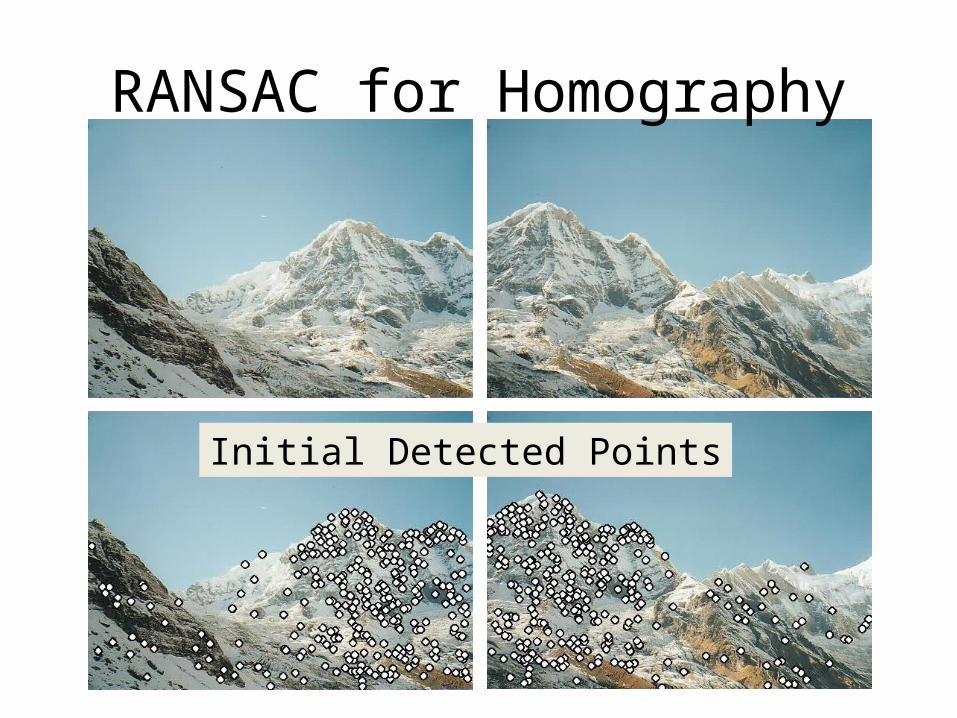
RANSAC for Homography
Initial Detected Points
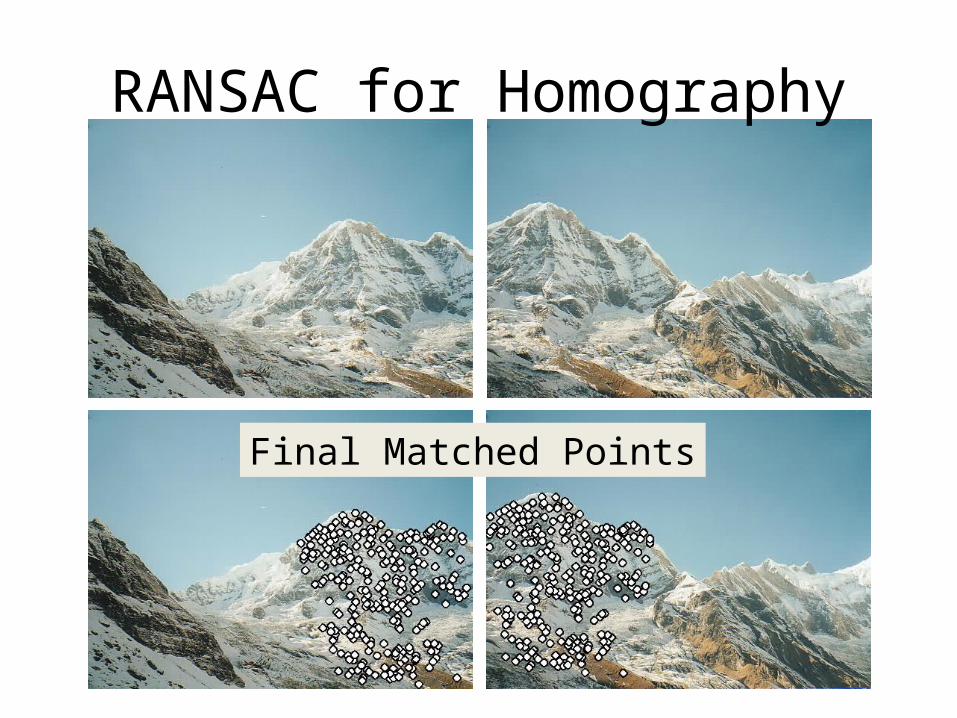
RANSAC for Homography
Final Matched Points

RANSAC for Homography
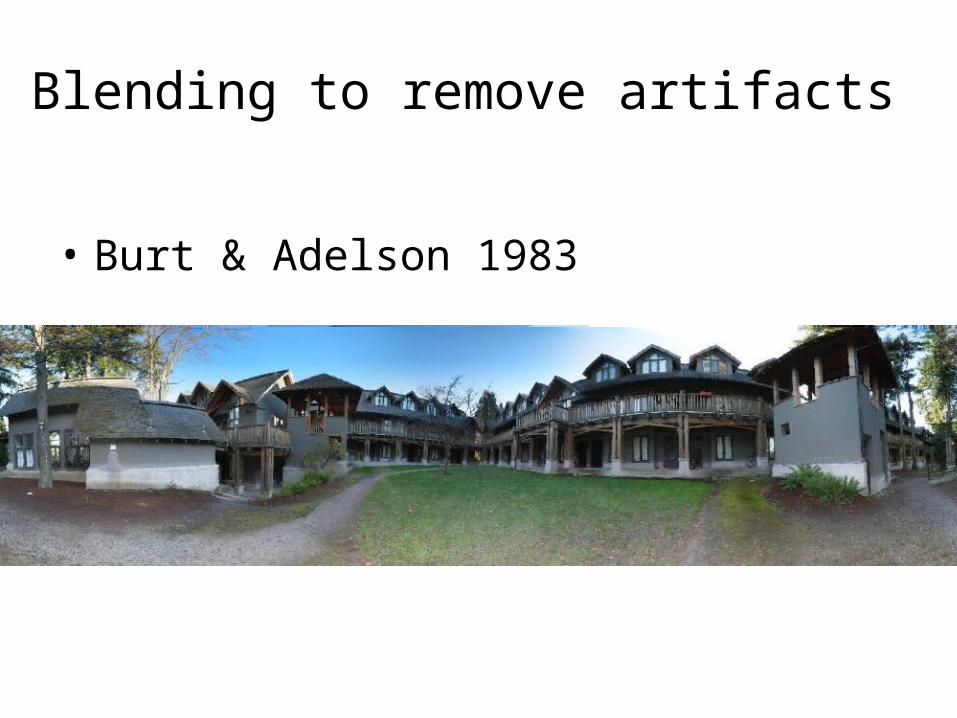
Blending to remove artifacts
• Burt & Adelson 1983
Further reading
Harley and Zisserman: Multi-view Geometry book• DLT algorithm: HZ p. 91 (alg 4.2), p. 585• Normalization: HZ p. 107-109 (alg 4.2)• RANSAC: HZ Sec 4.7, p. 123, alg 4.6• Tutorial:
http://users.cecs.anu.edu.au/~hartley/Papers/CVPR99-tutorial/tut_4up.pdf
• Recognising Panoramas: Brown and Lowe, IJCV 2007





























