Embed Size (px)
Citation preview

III MODEL DAN SIMULASI KENDALI SUHU, KELEMBABAN,
DAN AMONIA PADA BROILER CLOSED HOUSE BERBASIS
ON-OFF, PID, FUZZY LOGIC DAN ANFIS
Abstract
Indonesia was a tropical area having a hot environmental conditions of air temperature and
humidity were high, with a diversity of very low temperatures, except for the equatorial
area of diversity is quite high temperatures and dry. According to the tropical regions
ranged from 23.5 o north latitude and 23.5 ° south latitude. The tropical climate is a
climate type is characterized by high temperatures and humidity throughout the year than
other regions at high latitudes. The annual average temperature was lowest 18oC. High
humidity causes the inhibition of the release mechanism/body heat tarnsfer or reduction of
heat loads can cause heat stress. Heat stress was what causes the decline in productivity.
Broilers were warm-blooded animals with homeothermis or her body temperature 40.6oC
and 41.7oC. High body temperature which makes the broiler has a limited ability to adjust
to ambient temperature. Therefore, the broiler would feel very depressed when the ambient
temperature was higher than his ideal temperature was 19-27oC. The research objectives
were: first, to model the heat transfer (temperature), humidity and ammonia in the broiler closed
house, the second, to simulate of control ON-OFF, PID, Fuzzy Logic and ANFIS parameters
temperature, humidity and ammonia in the broiler closed house. Temperature and humidity data
obtained directly from the sensor and data ammonia SHT75 ammonia sensor TGS 444 was
connected to the RS-232 cable to the microcontroller and the computer. Materials used
include: temperature and humidity sensor SHT75 and ammonia sensor TGS 444. A set of
computers and peripherals, thermocopel and hybrid recorder, a set of broiler closed house
with the insulation system, exhaust fan (fan), cooling pad (cooling unit), heater (heating
unit). The method used to make mathematical models to the heat transfer (temperature),
humidity and ammonia to create a mathematical model of a function of temperature,
humidity and ammonia, with the equation difrensial then transformed with laplace
equation with the transfer function. Transfer function as a substitute for realtime
allegations later included in the transfer function process control simulation. Simulation of
control in a brolier closed house in this study with 3 scenarios closed time during starter,
grower and finisher. Future studies using a broiler house closed. 300C to 26
0C setpoin the
starter, grower setpoin was 24-25 0C, setpoin 22-23
0C was a finisher. Controlling
temperature and humidity in broiler closed houses on using the method of self-tuning (self
tuning) control. Testing was done by testing the response variable input, set point tracking
test. Response testing performed on the machine control was modeled in the form of
transfer function with the input's of the constant in Matlab simulink. Testing the first set
point tracking was done by changing the temperature of 300C input value, 29
0C, 28
0C,
270C, 26
0C, 25
0C, 24
0C, 23
0C, 22
0C for control ON-OFF, PID, Fuzzy Logic and ANFIS.
Then in the second set point tracking will change the value of the input humidity was 70%,
60%, 50% for the control of the ON-OFF, PID, Fuzzy Logic and ANFIS. Continue
tracking the third set point humidity will change the input value of 20 ppm, 15 ppm, 10
ppm, 5 ppm, 2.5 ppm and 1 ppm for control ON-OFF, PID, Fuzzy Logic and ANFIS.
Performance response of control ON-OFF, PID, Fuzzy Logic and ANFIS according to the
transient control parameters.
Keyword: Model, simulation control ON-OFF, PID, Fuzzy Logic, ANFIS, on Broiler
Closed House.

58
Abstrak
Indonesia yang merupakan daerah tropis mempunyai kondisi lingkungan suhu udaranya
panas dan kelembaban yang tinggi, dengan keragaman suhu udara yang sangat rendah,
kecuali didaerah ekuator keragaman suhu cukup tinggi dan kering. Menurut wilayahnya
daerah tropis berkisar antara 23,5o
lintang utara dan 23,5o
lintang selatan. Iklim tropis
merupakan sebuah tipe iklim yang dicirikan oleh suhu dan kelembaban yang tinggi
sepanjang tahun melebihi daerah-daerah lain pada lintang tinggi. Suhu rata-rata tahunan
terendahnya yaitu 18oC. Tingginya kelembaban udara menyebabkan terhambatnya
mekanisme pelepasan/ pembuangan panas tubuh atau penurunan beban panas yang dapat
menimbulkan heat stress. Heat stress inilah yang menyebabkan penurunan produktivitas.
Ayam adalah hewan homeothermis atau berdarah panas dengan temperatur tubuhnya
40.6oC dan 41.7
oC
. Temperatur tubuh yang tinggi ini membuat ayam memiliki
kemampuan terbatas dalam menyesuaikan diri dengan temperatur lingkungan. Oleh karena
itu ayam akan merasa sangat tertekan jika suhu lingkungan lebih tinggi dari temperatur
ideal baginya yaitu 19-27oC. Tujuan Penelitian adalah: pertama, untuk memodelkan
pindah panas (suhu), kelembaban dan amonia pada broiler house, kedua, untuk
mensimulasikan kendali ON-OFF, PID, Fuzzy Logic dan ANFIS suhu, kelembaban dan
amonia pada broiler house. Data suhu dan kelembaban diperoleh secara lansung dari
sensor SHT75 dan data amonia sensor amonia TGS 444 dihubungkan dengan kabel RS-
232 ke mikrokontroler dan komputer. Peralatan yang digunakan meliputi : sensor suhu dan
kelembaban SHT75 dan sensor amonia TGS 444. Satu set komputer dan peripheral,
thermokopel dan hybrid recorder, satu set kandang ayam dengan sistem isolasinya,
exhaust fan (kipas angin), cooling pad (unit pendingin), heater (unit pemanas). Metode
digunakan membuat model matematik pindah panas (suhu), kelembaban dan amonia untuk
membuat model matematik fungsi suhu, kelembaban dan amonia, dengan persamaan
difrensial kemudian ditransformasikan dengan persamaan laplace dengan fungsi alih.
Fungsi alih sebagai sebagai pengganti dugaan realtime kemudian fungsi alih dimasukan
dalam proses simulasi kendali. Simulasi kendali pada kandang ayam dalam penelitian ini
broiler closed house dengan 3 skenario waktu pada masa starter, grower dan finisher.
Penelitian selanjutnya menggunakan beberapa broiler closed house. Untuk setpoin 260C-
300C adalah starter, setpoin 24-25
0C adalah grower, setpoin 22-23
0C adalah finisher.
Pengendali suhu dan kelembaban pada broiler closed house pada ayam broiler
menggunakan metode swa-tala (self tuning) kendali. Pengujian dilakukan dengan uji
respon variabel input, uji tracking set point. Pengujian respon dilakukan pada mesin
kendali yang dimodelkan dalam bentuk fungsi alih dengan input-an dari konstanta pada
simulink Matlab. Pengujian tracking set point pertama pada suhu dilakukan dengan
merubah nilai masukan sebesar 300C, 29
0C, 28
0C, 27
0C,26
0C,25
0C,24
0C,23
0C,22
0C untuk
kendali ON-OFF, PID, Fuzzy Logic dan ANFIS. Kemudian pada tracking set point kedua
akan merubah nilai masukan kelembaban sebesar 70%, 60%, 50% untuk kendali ON-OFF,
PID, Fuzzy Logic dan ANFIS. Dilanjutkan tracking set point ketiga akan merubah nilai
masukan kelembaban sebesar 20 ppm, 15 ppm, 10 ppm, 5 ppm, 2,5 ppm dan 1 ppm untuk
kendali ON-OFF, PID, Fuzzy Logic dan ANFIS. Kinerja respon kendali ON-OFF, PID,
Fuzzy Logic dan ANFIS sesuai parameter kendali transien.
Keyword: Model, simulasi kendali ON-OFF, PID, Fuzzy Logic, ANFIS, Broiler Closed
House.

59
Pendahuluan
Indonesia yang merupakan daerah tropis mempunyai kondisi lingkungan
suhu udaranya panas dan kelembaban yang tinggi, dengan keragaman suhu udara
yang sangat rendah, kecuali didaerah ekuator keragaman suhu cukup tinggi dan
kering. Menurut wilayahnya daerah tropis berkisar antara 23,5o
lintang utara dan
23,5o
lintang selatan. Iklim tropis merupakan sebuah tipe iklim yang dicirikan oleh
suhu dan kelembaban yang tinggi sepanjang tahun melebihi daerah-daerah lain
pada lintang tinggi. Suhu harianya dapat melebih 35oC atau yang secara umum
suhu lingkungan bisa berfluktuasi antara 29oC hingga 36
oC dan kelembabannya 70-
80% (Hery 2009). Menurut (Rao et al. 2002) pemeliharaan unggas di negara-
negara tropis, suhu lingkungan merupakan stressor utama dengan kisaran suhu
yang luas dari 35oC- 43°C untuk waktu yang lama. Suhu rata-rata tahunan
terendahnya yaitu 18oC (Handoko 1995). Tingginya kelembaban udara
menyebabkan terhambatnya mekanisme pelepasan/ pembuangan panas tubuh atau
penurunan beban panas yang dapat menimbulkan heat stress. Heat stress inilah
yang menyebabkan penurunan produktivitas.
Ayam adalah hewan homeothermis atau berdarah panas dengan temperatur
tubuhnya 40.6oC dan 41.7
oC. Temperatur tubuh yang tinggi ini membuat ayam
memiliki kemampuan terbatas dalam menyesuaikan diri dengan temperatur
lingkungan. Oleh karena itu ayam akan merasa sangat tertekan jika suhu
lingkungan lebih tinggi dari temperatur ideal baginya yaitu 19-27oC (Hamidi 2006;
Alimuddin et al. 2011).
Ternak unggas dalam hal ini ayam broiler bernafas dengan menghirup
oksigen dan mengeluarkan gas karbondioksida serta air. Dalam hal ini apabila
terlalu rendah kadar oksigen didalam kandang kondisi ini berhubungan dengan
temperatur dan kelembaban kandang, maka akan perdampak pada produksi dan
kesehatan ayam. Kotoran ayam mengandung gas beracun yaitu amonia (NH3),
hydrogen sulfida (H2S), karbondioksida (CO2) dan methane. Diantara gas bercun
tersebut yang paling banyak menimbulkan masalah bagi kesehatan dan
produktivitas ternak serta pemukiman adalah amonia.

60
Tabel 3. 1 Batas aman dan kematian akibat gas yang merugikan di broiler closed
house
Jenis Gas Batas Kematian
(%)
Batas Aman
% ppm
Amonia > 0.05 < 0.0025 < 25
Hidrogen Sulfida >0.05 < 0.004 <40
Carbon Dioksida > 30 < 1 <10 000
Methana >5 < 5 <50 000
Sumber: (North dan Bell 1990)
Konsentrasi NH3 dalam kandang dipengaruhi oleh pakan yang dikonsumsi,
tata laksana perkandangan, penanganan kotoran ternak, jumlah kotoran dalam
kandang, serta temperatur dan kelembaban yang tinggi. Konsentrasi NH3
meningkat sejalan dengan meningkatnya kelembaban, pH, dan temperatur kandang,
serta populasi mikroorganisme (Rohaeni 2005). Sedangkan menurut (Liu 2007)
konsentrasi amonia dipengaruhi oleh temperatur udara dan litter, laju ventilasi,
kecepatan aliran udara, pH dari litter, kadar nitrogen pada litter, kadar air pada
litter, kondisi daerah yang dibangun kandang, desain kandang, dan manajeman
perkandangan. Desain kandang berventilasi alami unggas sulit diterapkan karena
dipengaruhi dari lingkungan luar sehingga diperlukan ventilasi mekanik (Lacy dan
Czarmick 2000).
Daging merupakan komoditas peternakan sumber protein hewani dan yang
banyak dikonsumsi sekarang ini adalah daging broiler. Sejauh ini konsumsi
masyarakat terhadap broiler semakin tinggi, sehingga peternak broiler harus
berusaha menyediakan kebutuhan daging untuk masyarakat. Standar yang di
tetapkan oleh FAO, kebutuhan protein hewani adalah 6 g/kapita/hari dan yang
sudah terpenuhi sebesar 4,19 g/kapita/hari (Agustina 2010).
Bobot badan kumulatif ayam broiler berumur 5 minggu adalah 1.915 g/ekor
atau rataan pertambahan bobot badan 370 g/ekor/minggu (NRC 1994). Rata-rata
pertambahan bobot badan hasil penelitian ini sebesar 1864 g/ekor/minggu (Piliang
& Djojosoebagjo 2006). Selanjutnya disebutkan bahwa konsumsi kumulatif broiler
berumur 6 minggu adalah 3.471 g/ekor atau rata-rata konsumsinya adalah 578,5
g/ekor/minggu. Rata-rata konsumsi pakan hasil penelitian 570 g/ekor/minggu.
Konversi pakan hasil penelitian berkisar antara 1,95 – 2,01 dan konversi pakan
yang baik berkisar antara 1,75–2,00. Semakin rendah angka konversi pakan berarti
kualitas pakan semakin baik (Amrullah 2003).

61
Ayam broiler merupakan salah satu jenis ternak yang mempunyai
kemampuan yang tinggi dalam mengonversikan ransum yang dikonsumsinya
menjadi daging. Produktivitas broiler dipengaruhi oleh faktor genetik dan
lingkungan. Lingkungan memberikan pengaruh terbesar (70%) dalam menentukan
performan ternak, sedangkan faktor genetik 30%. Suhu lingkungan di Indonesia
tinggi merupakan salah satu masalah dalam pencapaian performans broiler yang
optimal. Pada suhu yang tinggi, broiler akan mengalami stres, yang akan
mempengaruhi penurunan konsumsi ransum sehingga terjadi penurunan bobot
tubuh. Broiler mengalami stres karena panas proses metabolisme setelah
mengonsumsi ransum dan panas tambahan karena suhu lingkungan yang tinggi
sehingga broiler akan banyak mengonsumsi air minum. Meminimalkan gangguan
selama cuaca panas dapat dilakukan dengan cara mengubah spesifikasi ransum dan
praktek pemberian ransum. Unggas banyak dihadapkan pada stres yang berasal
dari berbagai sumber antara lain praktek manajemen, nutrisi, dan kondisi
lingkungan. Kebiasaan peternak broiler yang pada umumnya lebih banyak
memberikan ransum pada siang hari, sangat tidak mendukung untuk pencapaian
performans broiler yang optimal (Amrullah 2003; Alimuddin et al. 2011).
Dengan kondisi lingkungan tropik diperlukan teknologi peternakan berupa
sistem kendali untuk mengoptimalkan manajemen lingkungan broiler closed house
memberikan hasil budidaya peternakan yang memiliki karakteristik ekonomis
dengan ciri yang khas antara lain pertumbuhannya cepat, sebagai penghasil daging
dengan konversi makanan rendah dan siap dipotong pada usia yang relatif muda
(Priyatno 2000).
Sistem kendali pada awalnya adalah konvensional dimana informasi
numerik yang merupakan pasangan data masukan dan keluaran plant diperoleh dari
sensor. Sedang informasi linguistik biasanya diperoleh dari operator yang paham
dengan pengendalian plant dimaksud (Ogata 2002). Dalam perkembangannya,
sistem kendali mengarah kepada sistem kendali berbasis komputer digital karena
lebih luwes (mudah dimodifikasi), pemrosesan data yang sederhana, dan ekonomis
(Paraskevopoulos 1996). Berkembangnya sistem kendali digital membuat banyak
peneliti yang memfokuskan penelitiannya pada metode atau algoritma yang
digunakan sebagai pengendali. Diawali dari pengendalian dengan metode PID,
yaitu dengan cara menyetel beberapa parameter sehingga dihasilkan hasil
62
pengendalian yang optimal. Ketidakmampuannya untuk beradaptasi pada beberapa
perubahan seperti performansi komponen dengan pertambahan waktu atau
perubahan parameter dan kondisi sekelilingnya maka dibutuhkan sistem kendali
yang bisa beradaptasi pada perubahan-perubahan tersebut.
Metode yang mendapat perhatian luas dalam dasawarsa terakhir adalah
metode berbasis kecerdasan buatan (artificial intelligence) yaitu neuro fuzzy. Neuro
fuzzy merupakan perpaduan jaringan neural artificial dan sistem logika fuzzy
(Kosko 1992), (Kartalopoulos1996). Pada sistem kendali berbasis neuro fuzzy,
informasi numerik dimanfaatkan oleh jaringan neural artifisial guna mendapatkan
kinerja sistem kendali yang bersifat adaptif (Brown dan Harris 1994). Jaringan ini
meniru kerja jaringan neural biologis manusia. Jaringan neural dikarakteristikkan
oleh arsitektur, algoritma pembelajaran, dan fungsi aktivasinya. Sedang informasi
linguistic diolah menggunakan sistem logika fuzzy (Visioli dan Finzi 1998). Pada
sistem logika fuzzy, informasi linguistik diimplementasikan dalam suatu himpunan
basis aturan jika-maka. Basis aturan ini mengakomodasi semua informasi yang
tidak presisi tentang hubungan masukan dan keluaran plant. Sistem neuro fuzzy
terus mengalami perkembangan dan penyempurnaan algoritma. Salah satu
perkembangannya adalah dengan diperkenalkannya metode ANFIS (Adaptive
Neuro Fuzzy Inference System) oleh (Jang 1993). ANFIS) adalah sistem inferensi
logika fuzzy yang diimplementasikan pada suatu jaringan adaptif. Sistem ini
memiliki kemampuan untuk memperbaiki parameter-parameter basis aturan logika
fuzzynya yaitu parameter premis dan parameter konsekuensi. Metode ANFIS
(Adaptive Neuro Fuzzy Inference System) selanjutnya mengalami berbagai
penyempurnaan diantaranya oleh (Wang dan Lee 2002) dengan penerapan pada
sistem pemrosesan sinyal untuk keperluan medis. Penerapan metode ANFIS
(Adaptive Neuro Fuzzy Inference System) untuk sistem kendali agar bersifat cerdas,
yaitu mampu beradaptasi sesuai dengan perubahan target pengendalian dan juga
kondisi mesin kendali.
Dalam sistem kendali dikenal adanya model sistem dinamik dalam
persamaan difrensial untuk memodelkan mesin kendali, selanjutnya
ditransformasikan dalam bentuk persamaan Laplace. Fungsi alih sistem
didefinisikan sebagai perbandingan transformasi Laplace keluaran terhadap
transformasi Laplace masukan. Fungsi alih sistem juga merupakan model
63
matematika yang menghubungkan variabel masukan dengan variabel keluaran.
(Ogata Katsuhiko 1994, 2002; Robert dan Kent 1997; Bolton 1995, 2006;
Benyamin 1998; Roro 2001). Fungsi alih sebagai bagian dari parameter kendali
untuk menghasilkan output kendali (ON OFF, PID, Fuzzy logic dan ANFIS).
Sistem Kendali
Sistem merupakan bagian dari terjadinya proses, sedang sesuatu yang
bukan sistem atau membatasi sistem disebut lingkungan. Komponen utama dalam
sistem adalah masukan, keluaran dan proses. Menurut Gopal (2003), Masukan
(input) adalah aliran energi dan atau material yang menyebabkan proses bereaksi
atau berespon. Masukan ini dapat berupa manipulated input yaitu masukan yang
berasal dari dalam atau dari luar lingkungan yang tidak diharapkan dan
pengaruhnya tidak dapat dihindari. Keluaran (output) adalah variabel respon yang
diharapkan berperilaku sebagaimana yang diharapkan. Proses sistem diperoleh
dari fungsi transfer, fungsi transfer merupakan perbandingan antara transformasi
Laplace keluaran terhadap transformasi Laplace masukan dengan anggapan kondisi
awal adalah nol (t = 0).
Di dalam sistem kontrol terdapat tiga model sistem yaitu, sistem kontrol
terbuka (Open Loop Control System), sistem kontrol tertutup (Close Loop Control
System) dan sistem kontrol umpan balik (Feedback Control System). Sistem kontrol
terbuka adalah sistem yang menggunakan alat untuk mengontrol proses tanpa
menggunakan umpan balik, sehingga keluaran tidak berpengaruh terhadap sinyal
yang masuk kedalam proses. Sistem kontrol tertutup adalah sistem yang
menggunakan pengukuran dari keluaran dan membandingkan dengan keluaran
yang diinginkan. Sistem kontrol umpan balik adalah sistem yang mempertahankan
hubungan yang ditentukan antara keluaran dan beberapa masukan acuan, dengan
membandingkan antara keduanya dan menggunakan antara keduanya dan
menggunakan perbedaannya sebagai alat kendali (Kuo 1995)
Sistem selalu dipengaruhi gangguan (disturbance) yang berasal dari luar
atau dari dalam sistem, gangguan merupakan sinyal yang cenderung mempunyai
pengaruh yang merugikan pada harga keluaran sistem. Sistem kontrol tertutup
dapat mengurangi pengaruh gangguan. Akibat dari adanya gangguan tersebut
menyebabkan adanya sinyal kesalahan (error signal), yaitu perbedaan antara
64
variabel masukan dengan keluaran (Dorf 1989). Untuk itu diperlukan pengontrol
yang menerima informasi tentang nilai yang diinginkan dari keluaran dan
menggunakan informasi sebagai kontrol untuk variabel termanipulasi sebagai
akibat dari efek gangguan dan mengendalikan sistem dengan memanipulasi sinyal
error, sehingga output sistem sama dengan input yang diberikan.
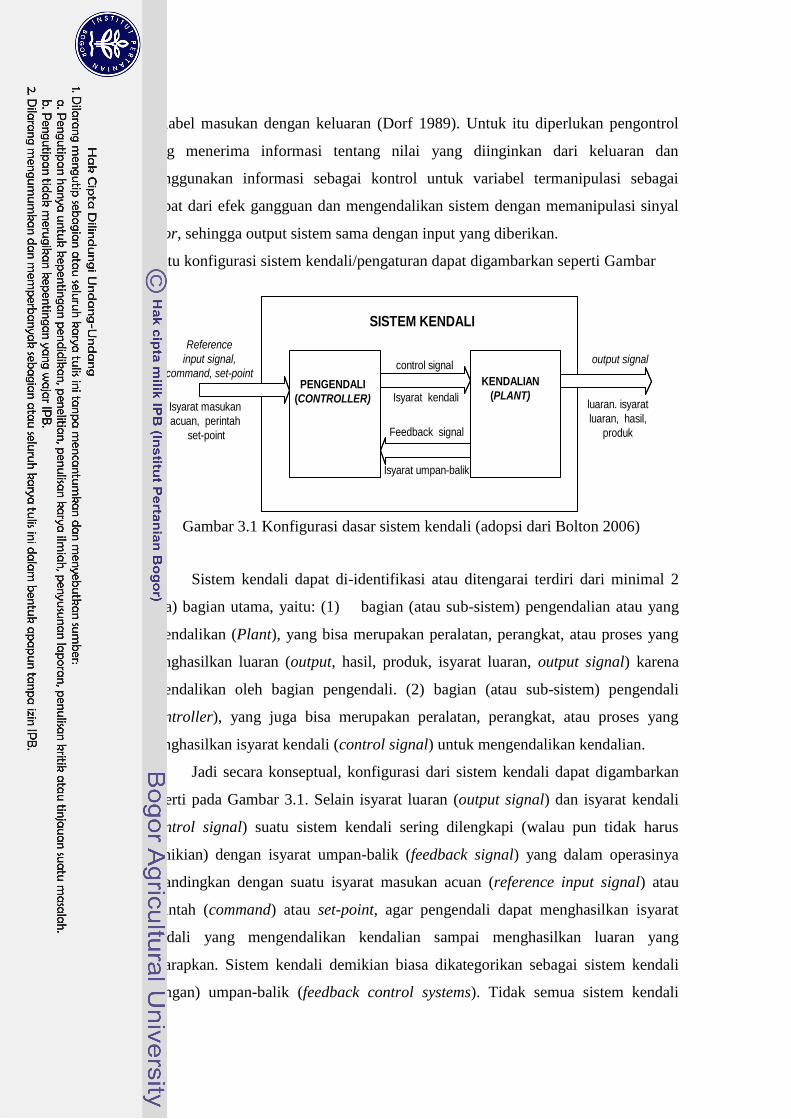
Suatu konfigurasi sistem kendali/pengaturan dapat digambarkan seperti Gambar
3.1
control signal
Isyarat kendali
Feedback signal
Isyarat umpan-balik
PENGENDALI
(CONTROLLER)
KENDALIAN
(PLANT)
SISTEM KENDALI
Reference
input signal,
command, set-point
Isyarat masukan
acuan, perintah
set-point
output signal
luaran. isyarat
luaran, hasil,
produk
Gambar 3.1 Konfigurasi dasar sistem kendali (adopsi dari Bolton 2006)
Sistem kendali dapat di-identifikasi atau ditengarai terdiri dari minimal 2
(dua) bagian utama, yaitu: (1) bagian (atau sub-sistem) pengendalian atau yang
dikendalikan (Plant), yang bisa merupakan peralatan, perangkat, atau proses yang
menghasilkan luaran (output, hasil, produk, isyarat luaran, output signal) karena
dikendalikan oleh bagian pengendali. (2) bagian (atau sub-sistem) pengendali
(controller), yang juga bisa merupakan peralatan, perangkat, atau proses yang
menghasilkan isyarat kendali (control signal) untuk mengendalikan kendalian.
Jadi secara konseptual, konfigurasi dari sistem kendali dapat digambarkan
seperti pada Gambar 3.1. Selain isyarat luaran (output signal) dan isyarat kendali
(control signal) suatu sistem kendali sering dilengkapi (walau pun tidak harus
demikian) dengan isyarat umpan-balik (feedback signal) yang dalam operasinya
dibandingkan dengan suatu isyarat masukan acuan (reference input signal) atau
perintah (command) atau set-point, agar pengendali dapat menghasilkan isyarat
kendali yang mengendalikan kendalian sampai menghasilkan luaran yang
diharapkan. Sistem kendali demikian biasa dikategorikan sebagai sistem kendali
(dengan) umpan-balik (feedback control systems). Tidak semua sistem kendali

65
merupakan sistem kendali dengan umpan-balik, banyak juga sistem kendali yang
beroperasi tanpa umpan-balik.
Sistem Kendali ON-OFF
Model kendali ON-OFF merupakan sebuah yang diaktivasi oleh sinyal error
dan hanya menyupali sinyal pengoreksi ON-OFF. (Bolton W, 2006). Pada sistem
kontrol ON-OFF, elemen pembangkit hanya memiliki dua posisi tertentu yaitu ON
dan OFF. Kontrol ON-OFF memiliki karakteristik sinyal keluaran dari kendali u(t)
tetap pada salah satu nilai maksimum atau minimum tergatung apakan sinyal
kesalahan positif atau negatif. (Nalwan 2003) Diagram blok kendali ON-OFF yang
memiliki masukan e(t) dan keluaran u(t), ditunjukkan pada Gambar 3.2.
Gambar 3. 2 Diagram kendali ON-OFF (Nalwan 2003)
Aksi kontrol ON-OFF ditunjukkan pada persamaan
…………………………………………………………..(3.1)
Persamaan (3.1) memiliki nilai U1 dan U2 yang konstan. Nilai minimum U2
dapat sebasar nol atau - U1. Pada sistem kendali ikal tertutup (close loop), sinyal
e(t) merupakan sinyal kesalahan aktuasi (error) sebesar selisih antara sinyal input
dengan sinyal umpan balik.
Gambar 3. 3 (a) Diagram blok kontroler ON-OFF; (b) Diagram blok kontroler
ON-OFF dengan jurang diferensial
(Adopsi Bolton 2006 dan Nalwan 2003)
Gambar 3. 3.(a) dan (b) menunjukkan diagram blok kendali dua posisi.
Daerah dengan sinyal pembangkit kesalahan yang digerakkan sebelum terjadi
switching disebut jurang diferensial. Jurang diferensial ditunjukkan pada Gambar

66
3.3(b). Suatu jurang diferensial menyebabkan keluaran kendali u(t) tetap pada nilai
awal sampai sinyal pembangkit kesalahan telah bergerak mendekati nilai nol.
Dalam beberapa kasus jurang diferensial terjadi sebagai akibat adanya penghalang
yang tidak dikehendaki dan gerakan yang hilang, sering juga hal ini dimaksudkan
untuk mencegah operasi yang berulang-ulang dan mekanisme ON-OFF.
Pengendalian ON-OFF hanya bekerja pada dua posisi, yaitu posisi ON dan
posisi OFF. Kalau final kontrol element berupa control valve , kerja valve hanya
terbuka penuh atau tertutup penuh. Pada sistem pengendalian ON-OFF control
valve tidak akan pernah bekerja didaerah antara 0 sampai 100%. Karena kerjanya
yang ON-OFF, maka hasilnya pengendali ON-OFF akan menyebabkan proses
variabel yang bergelombang, tidak pernah konstan. Perubahan proses variabel akan
seirama dengan perubahan posisi final control element. Besar kecinya fluktuasi
proses variabel ditentukan oleh titik kendali ON dan titik OFF. Contoh
pengendalaian ON-OFF yang paling mudah ditemukan pengendalian suhu pada
seterika listrik atau pompa air listrik otomatis. Kedua alat ini bekerja secara ON-
OFF dengan memanfaatkan adjustable dead band yang ada pada temperature
switch dan pressure switch (Nalwan 2003).
Kerja pengendalian ON-OFF banyak dipakai di sistem pengendalian yang
sederhana karena harganya yang relatif murah. Namun , tidak semua proses dapat
dikendalikan secara ON-OFF karena banyak operasi proses yang tidak dapat
mentolerir fluktuasi proses variabel. Jadi, syarat utama untuk memakai pengendali
ON-OFF bukan untuk menghemat biaya unit pengendali melainkan karena proses
memang tidak dapat mentolerir fluktuasi proses variabel pada batas-batas kerja
pengendalian ON-OFF (Bolton 2006).
Sistem Kendali PID
Kendali PID adalah kendali berumpanbalik yang paling populer di dunia
industri. Selama lebih dari 50 tahun, kendali PID terbukti dapat memberikan
kinerja kendali yang baik meski mempunyai algoritma sederhana yang mudah
dipahami [Willis, 1999]. Hal krusial dalam desain kendali PID ialah tuning atau
pemberian parameter P, I, dan D agar didapatkan respon sistem yang kita inginkan.
Pada tahun 1942, Ziegler-Nichols mengembangkan metode kurva reaksi
(open loop tuning) di mana kita bisa mendapatkan parameter P, I, D dari respon
67
open loop sistem (tidak perlu mengetahui model plant). Selain itu mereka juga
mengembangkan metode osilasi (close loop tuning) yang bisa menangani plant
yang mengandung integrator (tidak stabil). Setelah itu pada tahun 1967
dikembangkan metode tuning yang bertujuan meminimasi nilai integral kesalahan
yang disebut minimum error integral tuning (Smith dan Corripio 1997).
Kemudian muncul metode tuning yang berdasar model plant, karena
identifikasi plant bukan lagi hal yang sulit untuk dilakukan. Metode pertama ialah
direct synthesis yang memerlukan model plant sebenarnya dan model plant yang
diinginkan untuk mendapatkan parameter kendali P, I, D. Metode berikutnya yang
hampir sama ialah internal model control yang dikembangkan oleh Garcia dan
Morrari pada tahun 1982 (Ray dan Oguinnake 1994).
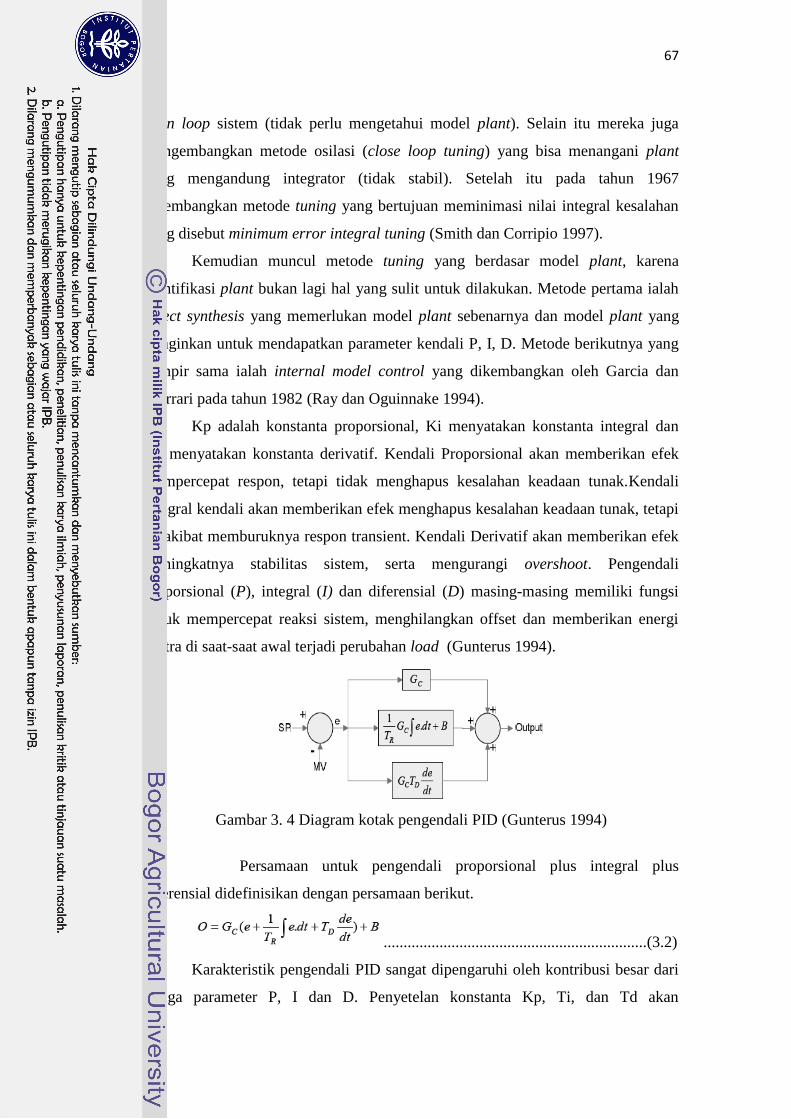
Kp adalah konstanta proporsional, Ki menyatakan konstanta integral dan
Kd menyatakan konstanta derivatif. Kendali Proporsional akan memberikan efek
mempercepat respon, tetapi tidak menghapus kesalahan keadaan tunak.Kendali
integral kendali akan memberikan efek menghapus kesalahan keadaan tunak, tetapi
berakibat memburuknya respon transient. Kendali Derivatif akan memberikan efek
meningkatnya stabilitas sistem, serta mengurangi overshoot. Pengendali
proporsional (P), integral (I) dan diferensial (D) masing-masing memiliki fungsi
untuk mempercepat reaksi sistem, menghilangkan offset dan memberikan energi
ekstra di saat-saat awal terjadi perubahan load (Gunterus 1994).
Gambar 3. 4 Diagram kotak pengendali PID (Gunterus 1994)
Persamaan untuk pengendali proporsional plus integral plus
diferensial didefinisikan dengan persamaan berikut.
..................................................................(3.2)
Karakteristik pengendali PID sangat dipengaruhi oleh kontribusi besar dari
ketiga parameter P, I dan D. Penyetelan konstanta Kp, Ti, dan Td akan

68
mengakibatkan penonjolan sifat dari masing-masing elemen. Satu atau dua dari
ketiga konstanta tersebut dapat disetel lebih menonjol dibanding yang lain.
Konstanta yang menonjol itulah akan memberikan kontribusi pengaruh pada respon
sistem secara keseluruhan.
Menurut (Gopal 2003, 2009) mengemukakan beberapa model kendali yaitu
kendali proporsional, kendali integral dan kendali derivatif.
Gambar 3. 5 Diagram blok dari kendali Proporsional – Integral – Derivatif
(Gopal 2003)
Pada kombinasi aksi kendali proporsional – integral - derivatif ini
didefinisikan oleh persamaan
0
tp
p p d
i
K de tu t K e t e t dt K T
T dt……………………………..(3.3)
Bila dinyatakan dalam fungsi alih menjadi
11 i
p d p d
i
U s KK T s K K s
E s T s s…………………………..(3.4)
Sistem Kendali Fuzzy Logik.
Teori Fuzzy dicetuskan oleh (L.A. Zadeh 1976) berdasarkan konsep
ketidakpastian manusia dalam menilai suatu obyek secara kualitatif. Dewasa ini
penggunaan yang paling banyak dari teori fuzzy adalah dalam bidang kendali.
Dengan teknik ini pengetahuan tentang model matematika yang presisi tidak lagi
diperlukan. Menurut (Yan Jun, Ryan Michael, Power James 1994), pendekatan
metode fuzzy dapat membantu dalam menjelaskan ketidakpastian batas antara satu
criteria dengan criteria lainnya, yang disebabkan oleh adanya penilaian manusia
terhadap sesuatu secara kumulatif. Suatu himpunan fuzzy adalah suatu fungsi
keanggotaan µ yang mmerlukan anggota-anggota himpunan tersebut dalam selang
[0,1]. Bila x adalah anggota himpunan fuzzy maka µ(x) adalah tingkat kecocokan
atau kesesuaian dengan konsep yang dipresentasikan oleh himpunan fuzzy. Nilai µ
-
C s +1
(s)
E s 1
1p d
i
K T sT s
69
(x) adalah 0 bila x sama sekali tidak cocok dan niainya adalah 1 apabila x memiliki
kecocokan total.
Suatu himpunan fuzzy A dapat ditulis sebagai fungsi berikut:
µA(x) : x > [0,1]
Hubungan yang berlaku pada himpunan fuzzy adalah:
Irisan : µA B(X) = min
Gabungan : µA B(X) = max
Komplemen : µAc(X) = 1- µA(x)
Himpunan Bagian : A µA(x) µB(x)
Dimana operator jika dan hanya jika
Pengelompokan keanggotaan digambarkan dalam sebuah fungsi
keanggotaan (membership function) (Li-Xin 1997). Dalam aplikasi pengendalian,
himpunan fuzzy disusun untuk menggambarkan simpangan, misalnya Negatif,
Negatif Besar, Positif, Positif Kecil atau Nol. Nilai-nilai ini yang akan diinferensi
menggunakan pernyataan If…Then… sehingga akan dihasilkan aksi pengendalian
yang perlu dilakukan berdasarkan kondisi parameter terukur yang akan
dikendalikan.
Metode fuzzy adalah salah satu perkembangan dari teori himpunan fuzzy
dan logika fuzzy dengan berbasiskan aturan yang menerapkan pemetaan nonlinier
antara masukan dan keluarannya. (Dadone Parlo, 2001). Untuk merancang sistem
pengendalian otomatis bagi proses-proses tersebut, yang mampu menterjemahkan
pengetahuan dan aturan-aturan fuzzy maka diperlukan teori logika fuzzy, sebagai
salah satu alternatif. Menurut (Yan 1994) menentukan variabel masukan kendali
fuzzy akan diseleksi sebagai kesalahan (error, E) dan perubahan kesalahan (delta
error, dE). Sinyal E didapatkan dari pengurangan keluaran sistem terhadap
setpoint, sedangkan sinyal dE didapatkan dari pengurangan sinyal error saat ini
dengan sinyal error sebelumnya. Kedua sinyal tersebut diolah oleh pengendali
fuzzy. Keluaran merupakan variasi perintah yang disusun sebagai berikut:
Jika keluaran sama dengan nilai yang diinginkan dan perubahan kesalahan
sama dengan nol, maka keluaran yang sebelumnya dipertahankan.
Jika keluaran tidak sesuai dengan yang diinginkan maka aksi kendali
tergantung pada nilai error dan perubahan error.

70
Kontrol Logika
FuzzyPlant
Set Point
+ _
Outputs
E
dE
Gambar 3. 6 Struktur kendali logika fuzzy untuk pengendalian sistem.
Sumber : (Yan 1994)
Kendali logika fuzzy yang digunakan untuk pengendalian sistem terdiri dari
empat bagian dasar yaitu fuzzifikasi, basis pengetahuan, fuzzy inference engine
dan defuzzifikasi. Struktur dasar kendali logika fuzzy tersebut dapat dilihat pada
gambar berikut :
Gambar 3. 7 Struktur dasar kontrol logika fuzzy. Sumber: (Yan 1994)
Gambar 3. 8 Operasi kendali logika fuzzy. Sumber: (Reznik 1997)
Basis Pengetahuan
( Basis data dan Basis Aturan )
Fuzzifikasi Defuzzifikasi
Fuzzy Inference Engine
Plant
ndisi (X)
Aksi Kontrol (U)
71
Adapun kendali fuzzy pada dasarnya adalah teori himpunan, yang
mewadahi kriteria penilaian pada suatu obyek yang dilakukan secara kualitatif.
Konsep ini mengklasifikasikan suatu obyek seperti umum dilakukan oleh manusia,
misalnya ukuran sebuah benda adalah besar, sedang dan kecil. Oleh karena itu,
tidak semua orang akan memberikan penilaian yang sama pada keadaan suatu
obyek sehingga tingkat kecocokannya bisa berbeda-beda.Penilaian seorang ahli
tentu akan berbeda dengan orang biasa. Dengan landasan pembentukan logika
seperti ini maka banyak dipakai sebagai prosedur pengambilan keputusan dalam
bidang keceradasan buatan (Artificial Intelligence) (Turban 1995).
Sistem pengaturan dengan menggunakan kendali logika fuzzy berbeda
dengan menggunakan pengaturan konvensional. Sistem pengaturan konvensional
menggunakan asumsi bahwa sistem adalah linear dan merupakan proses yang
stationer dimana dalam pemodelan plant dinyatakan kondisi linier. Dengan asumsi
tersebut maka hasil yang dihasilkan tidak optimum. Untuk mendapatkan hasil yang
baik maka dikembangkan suatu kendali yang dapat memperbaiki kekurangan dari
kendali konvensional tersebut. Metode yang dikembangkan tersebut dikenal
dengan metode Fuzzy Logic Controller (FLC) (Yan 1994)
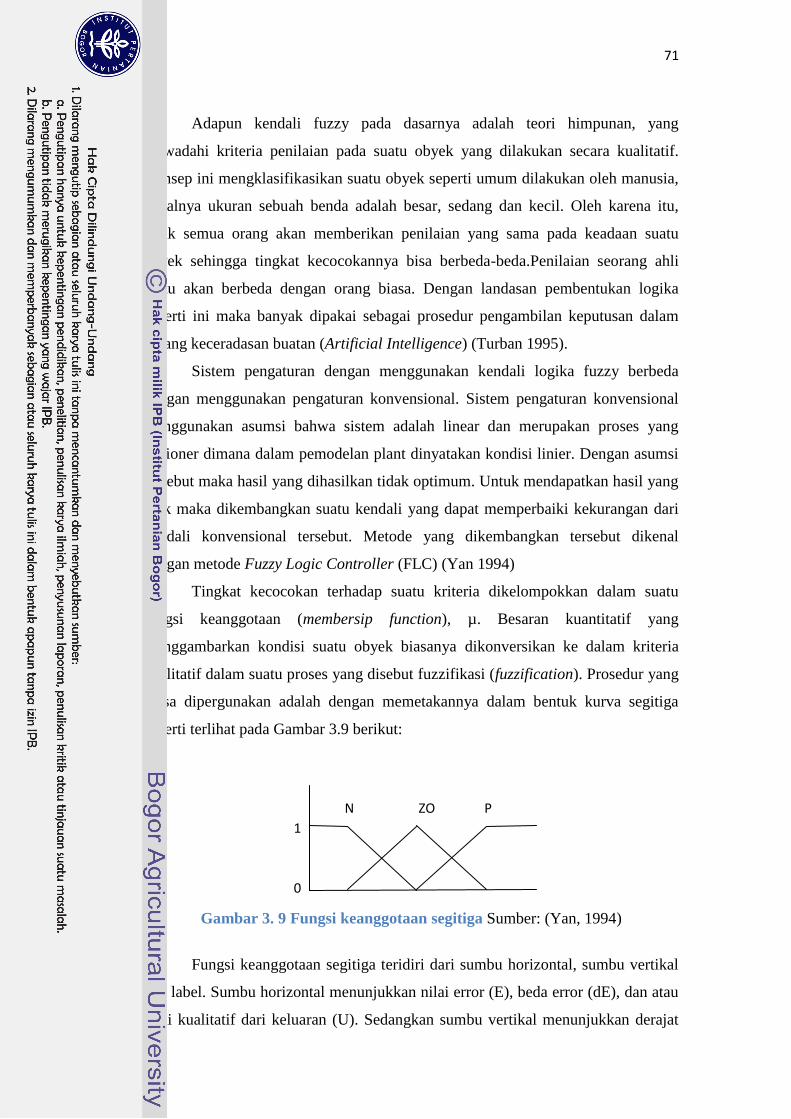
Tingkat kecocokan terhadap suatu kriteria dikelompokkan dalam suatu
fungsi keanggotaan (membersip function), µ. Besaran kuantitatif yang
menggambarkan kondisi suatu obyek biasanya dikonversikan ke dalam kriteria
kualitatif dalam suatu proses yang disebut fuzzifikasi (fuzzification). Prosedur yang
biasa dipergunakan adalah dengan memetakannya dalam bentuk kurva segitiga
seperti terlihat pada Gambar 3.9 berikut:
Gambar 3. 9 Fungsi keanggotaan segitiga Sumber: (Yan, 1994)
Fungsi keanggotaan segitiga teridiri dari sumbu horizontal, sumbu vertikal
dan label. Sumbu horizontal menunjukkan nilai error (E), beda error (dE), dan atau
nilai kualitatif dari keluaran (U). Sedangkan sumbu vertikal menunjukkan derajat
1
0
N ZO P
72
keanggotaan dari nilai error (E), beda error (dE) yang nilainya berselang 0–1.
Fungsi keanggotaan segitiga dan derajat keanggotaan dapat dilihat pada Gambar
3.9.
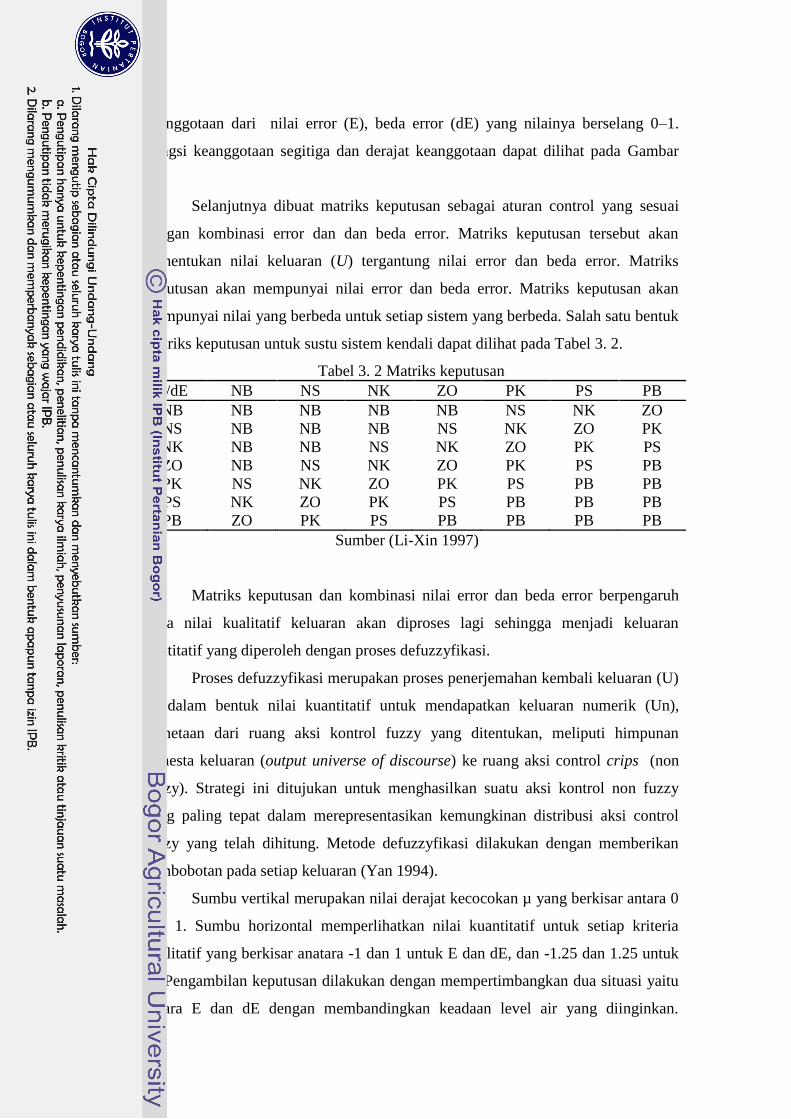
Selanjutnya dibuat matriks keputusan sebagai aturan control yang sesuai
dengan kombinasi error dan dan beda error. Matriks keputusan tersebut akan
menentukan nilai keluaran (U) tergantung nilai error dan beda error. Matriks
keputusan akan mempunyai nilai error dan beda error. Matriks keputusan akan
mempunyai nilai yang berbeda untuk setiap sistem yang berbeda. Salah satu bentuk
matriks keputusan untuk sustu sistem kendali dapat dilihat pada Tabel 3. 2.
Tabel 3. 2 Matriks keputusan
E/dE NB NS NK ZO PK PS PB
NB NB NB NB NB NS NK ZO
NS NB NB NB NS NK ZO PK
NK NB NB NS NK ZO PK PS
ZO NB NS NK ZO PK PS PB
PK NS NK ZO PK PS PB PB
PS NK ZO PK PS PB PB PB
PB ZO PK PS PB PB PB PB
Sumber (Li-Xin 1997)
Matriks keputusan dan kombinasi nilai error dan beda error berpengaruh
pada nilai kualitatif keluaran akan diproses lagi sehingga menjadi keluaran
kuntitatif yang diperoleh dengan proses defuzzyfikasi.
Proses defuzzyfikasi merupakan proses penerjemahan kembali keluaran (U)
ke dalam bentuk nilai kuantitatif untuk mendapatkan keluaran numerik (Un),
pemetaan dari ruang aksi kontrol fuzzy yang ditentukan, meliputi himpunan
semesta keluaran (output universe of discourse) ke ruang aksi control crips (non
fuzzy). Strategi ini ditujukan untuk menghasilkan suatu aksi kontrol non fuzzy
yang paling tepat dalam merepresentasikan kemungkinan distribusi aksi control
fuzzy yang telah dihitung. Metode defuzzyfikasi dilakukan dengan memberikan
pembobotan pada setiap keluaran (Yan 1994).
Sumbu vertikal merupakan nilai derajat kecocokan µ yang berkisar antara 0
dan 1. Sumbu horizontal memperlihatkan nilai kuantitatif untuk setiap kriteria
kualitatif yang berkisar anatara -1 dan 1 untuk E dan dE, dan -1.25 dan 1.25 untuk
U. Pengambilan keputusan dilakukan dengan mempertimbangkan dua situasi yaitu
antara E dan dE dengan membandingkan keadaan level air yang diinginkan.

73
Kombinasi kedua situasi ini menentukan nilai kualitatif U seperti dalam matrik
keputusan pada Tabel 3. 2. Nilai kualitatif U kemudian diterjemahkan menjadi nilai
kuantitatif dalam proses defuzifikasi dengan merujuk pada Gambar 33. Derajat
keanggotaan µ untuk Ei dan dEi dihitung dengan persamaan 17 dan
pembobotannya wij dihitung dengan persamaan 18. Uji diperoleh dengan merujuk
pada Tabel 3. 2 untuk nilai kualitatifnya dan Gambar 3.9 untuk kuantitatifnya. Nilai
keluaran (U) diperoleh berdasarkan pada persamaan di bawah ini.
Tabel 3. 3 Contoh Matrik Keputusan
dE
E P ZO N
P P P ZO
ZO P ZO N
N ZO N N
Sumber ( Li-Xin 1997)
…………………………………………………………………….(3.5)
Dimana, merupakan nilai kualitatif Eij atau dEij, =1 dan =0.
Wij= µ(Ei) x µ(dEj) …….......................………………………………………..(3.6)
………………............…………………………………………...(3.7)
Sistem Kendali ANFIS
Sistem kendali pada awalnya adalah konvensional dimana informasi
numerik yang merupakan pasangan data masukan dan keluaran plant diperoleh dari
sensor. Sedang informasi linguistik biasanya diperoleh dari operator yang paham
dengan pengendalian plant dimaksud (Ogata 2002). Dalam perkembangannya,
sistem kendali mengarah kepada sistem kendali berbasis komputer digital karena
lebih luwes (mudah dimodifikasi), pemrosesan data yang sederhana, dan ekonomis
(Paraskevopoulos 1996). Berkembangnya sistem kendali digital membuat banyak
peneliti yang memfokuskan penelitiannya pada metode atau algoritma yang
digunakan sebagai pengendali. Diawali dari pengendalian dengan metode PID,
yaitu dengan cara menyetel beberapa parameter sehingga dihasilkan hasil
pengendalian yang optimal. Ketidakmampuannya untuk beradaptasi pada beberapa
perubahan seperti performansi komponen dengan pertambahan waktu atau
perubahan parameter dan kondisi sekelilingnya maka dibutuhkan sistem kendali
yang bisa beradaptasi pada perubahan-perubahan tersebut. Metode yang mendapat
74
perhatian luas dalam dasawarsa terakhir adalah metode berbasis kecerdasan buatan
(artificial intelligence) yaitu neuro fuzzy. Neuro fuzzy merupakan perpaduan
jaringan neural artificial dan sistem logika fuzzy (Kosko 1992), (Kartalopoulos
1996).
Pada sistem kendali berbasis neuro fuzzy, informasi numerik dimanfaatkan
oleh jaringan syaraf tiruan guna mendapatkan kinerja sistem kendali yang bersifat
adaptif (Brown dan Harris 1994). Jaringan ini meniru kerja jaringan neural biologis
manusia. Jaringan neural dikarakteristikkan oleh arsitektur, algoritma
pembelajaran, dan fungsi aktivasinya. Sedang informasi linguistic diolah
menggunakan sistem logika fuzzy (Visioli dan Finzi, 1998). Pada sistem logika
fuzzy, informasi linguistik diimplementasikan dalam suatu himpunan basis aturan
jika-maka. Basis aturan ini mengakomodasi semua informasi yang tidak presisi
tentang hubungan masukan dan keluaran plant. Sistem neuro fuzzy terus mengalami
perkembangan dan penyempurnaan algoritma. Salah satu perkembangannya adalah
dengan diperkenalkannya metode ANFIS (Adaptive Neuro Fuzzy Inference System)
oleh (Jang 1993). ANFIS (Adaptive Neuro Fuzzy Inference System) adalah sistem
inferensi logika fuzzy yang diimplementasikan pada suatu jaringan adaptif. Sistem
ini memiliki kemampuan untuk memperbaiki parameter-parameter basis aturan
logika fuzzynya yaitu parameter premis dan parameter konsekuensi .
Metode ANFIS (Adaptive Neuro Fuzzy Inference System) selanjutnya
mengalami berbagai penyempurnaan diantaranya oleh Wang dan Lee (2002)
dengan penerapan pada sistem pemrosesan sinyal untuk keperluan medis.
Penerapan metode ANFIS (Adaptive Neuro Fuzzy Inference System) untuk sistem
kendali agar bersifat cerdas, yaitu mampu beradaptasi sesuai dengan perubahan
target pengendalian dan juga kondisi plant.
ANFIS merupakan jaringan adaptif yang secara fungsional ekivalen dengan
sistem inferensi fuzzy. ANFIS dapat diterapkan secara luas dalam pemodelan,
pengambilan keputusan, pemrosesan sinyal dan kendali. Salah satu metode kendali
yang dapat digunakan untuk menunjang kerja sistem adalah metode kendali
Adaptive Neuro-Fuzzy Inference System atau yang lebih dikenal dengan ANFIS.
(Widodo 2005). ANFIS adalah kendali logika fuzzy yang merupakan salah satu
bagian dari sistem pengaturan cerdas. Arsitektur jaringan adaftif yang digunakan
harus jaringan adaptif umpan maju, bila tidak ingin menggunakan model yang

75
dioperasikan secara kompleks. ANFIS dapat memperbaharui parameter-
parameternya menurut aturan belajar backpropagation.
Keterbatasan area kerja ini akan menyebabkan keterlambatan respon dari
sistem kendali jika pengendali hanya berbasis pada sistem kontrol ON-OFF, PID,
Fuzzy Logic biasa, dan salah satu teknik yang bisa dikembangkan untuk mengatasi
kelemahan sistem tersebut adalah dengan menggunakan kendali model prediksi
(model predictive control). Kendali model prediksi merupakan jenis sistem kendali
yang didesain berdasarkan model suatu proses. Model tersebut digunakan untuk
menghitung sejumlah nilai prediksi keluaran proses. Berdasarkan sejumlah nilai
prediksi tersebut, sinyal kendali yang akan diberikan ke proses dihitung dengan
melakukan minimalisasi suatu fungsi kriteria, sehingga selisih antara nilai prediksi
keluaran proses dengan sejumlah masukan referensi yang bersesuaian adalah
minimal (Sanchez 1996).
Pengendali fuzzy adaptif Neuro-dengan sejumlah kecil bobot dapat
dirancang dengan menggunakan arsitektur ANFIS. Struktur ANFIS bisa mengatasi
masalah parameter penalaan yang berlebihan dan perlu untuk pemodelan proses
dengan model jaringan terpisah seperti ANN, fuzzy atau ANFIS. Pembelajaran
terbalik adalah salah satu metode perancangan pengendalian ANFIS. Ini
melibatkan dua fase: pembelajaran (learning) dan fase pegujian (testing). Dalam
belajar tahap set training diperoleh dengan menghasilkan masukan secara acak, dan
mengamati output yang sesuai dihasilkan oleh plant.
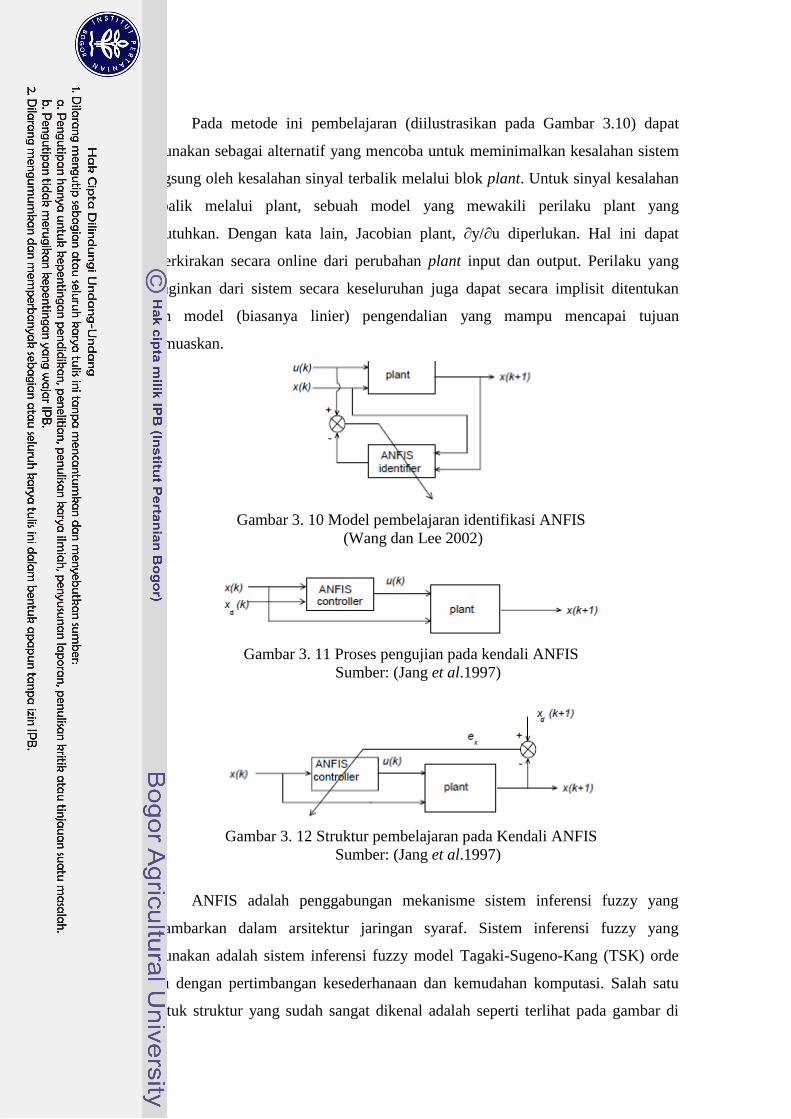
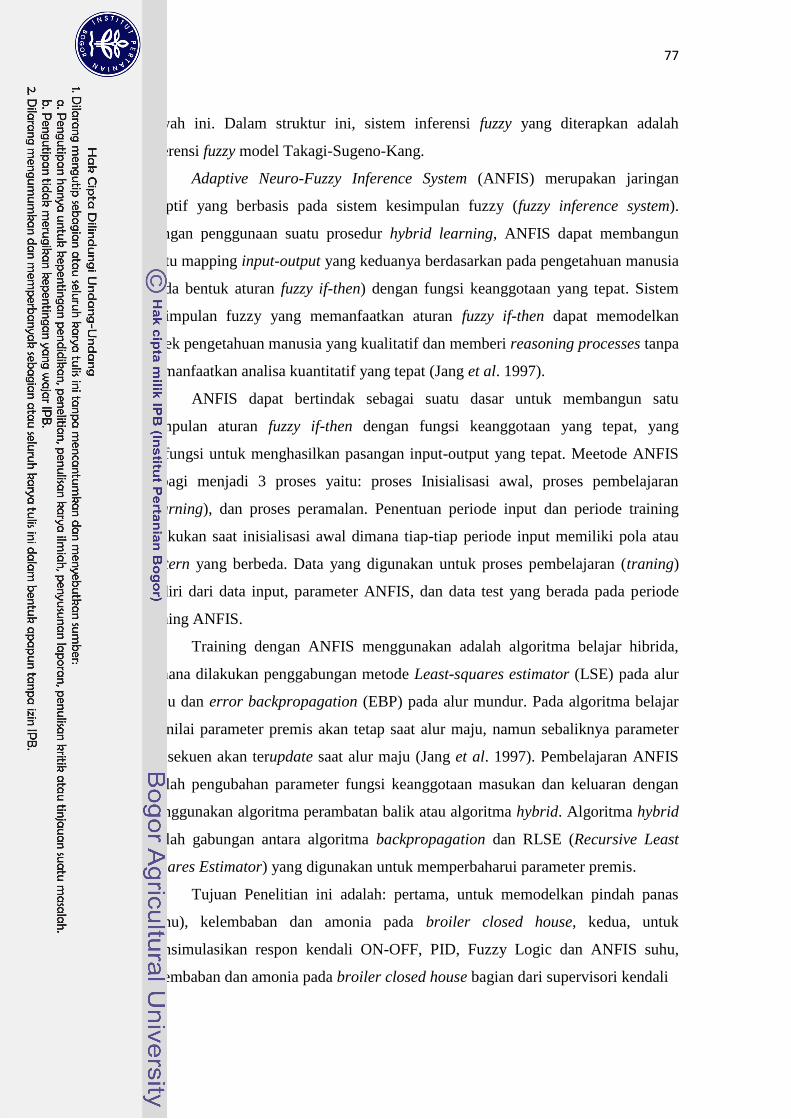
Dalam fase pengujian, identifikasi ANFIS akan disalin ke pengendali
ANFIS untuk menghasilkan output diinginkan. Fase pengujian dan fase
pembelajaran terbalik masing-masing ditunjukkan pada Gambar 3.10 dan 3.11.
Metode ini tampaknya mudah dan hanya satu tugas pembelajaran yang dibutuhkan
untuk mencari invers dari plant. Ini mengasumsikan keberadaan plant terbalik,
yang tidak berlaku secara umum. Meminimalkan kesalahan (error) jaringan tidak
menjamin minimalisasi kesalahan sistem secara keseluruhan. Namun, pembelajaran
terbalik adalah sebuah pendekatan tidak langsung yang mencoba untuk
meminimalkan jaringan output kesalahan bukan kesalahan sistem secara
keseluruhan (didefinisikan sebagai perbedaan antara lintasan diinginkan dan
aktual).
76
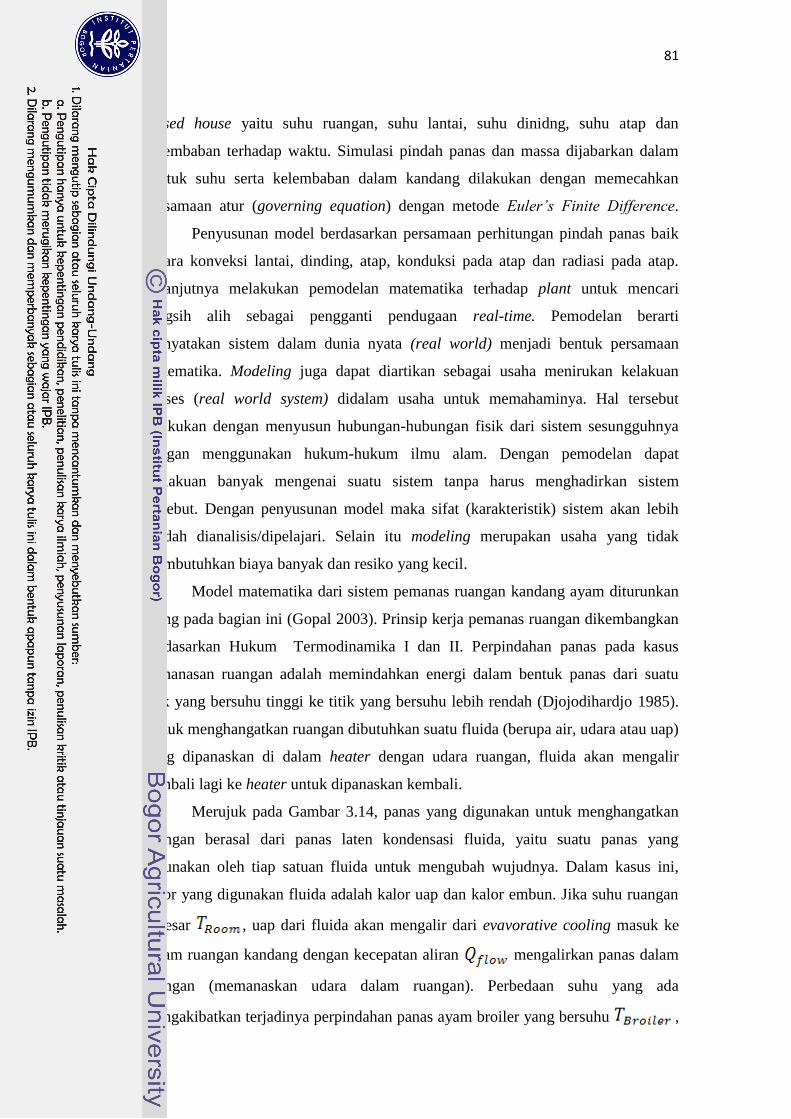
Pada metode ini pembelajaran (diilustrasikan pada Gambar 3.10) dapat
digunakan sebagai alternatif yang mencoba untuk meminimalkan kesalahan sistem
langsung oleh kesalahan sinyal terbalik melalui blok plant. Untuk sinyal kesalahan
terbalik melalui plant, sebuah model yang mewakili perilaku plant yang
dibutuhkan. Dengan kata lain, Jacobian plant, ∂y/∂u diperlukan. Hal ini dapat
diperkirakan secara online dari perubahan plant input dan output. Perilaku yang
diinginkan dari sistem secara keseluruhan juga dapat secara implisit ditentukan
oleh model (biasanya linier) pengendalian yang mampu mencapai tujuan
memuaskan.
Gambar 3. 10 Model pembelajaran identifikasi ANFIS
(Wang dan Lee 2002)
Gambar 3. 11 Proses pengujian pada kendali ANFIS
Sumber: (Jang et al.1997)
Gambar 3. 12 Struktur pembelajaran pada Kendali ANFIS
Sumber: (Jang et al.1997)
ANFIS adalah penggabungan mekanisme sistem inferensi fuzzy yang
digambarkan dalam arsitektur jaringan syaraf. Sistem inferensi fuzzy yang
digunakan adalah sistem inferensi fuzzy model Tagaki-Sugeno-Kang (TSK) orde
satu dengan pertimbangan kesederhanaan dan kemudahan komputasi. Salah satu
bentuk struktur yang sudah sangat dikenal adalah seperti terlihat pada gambar di
77
bawah ini. Dalam struktur ini, sistem inferensi fuzzy yang diterapkan adalah
inferensi fuzzy model Takagi-Sugeno-Kang.
Adaptive Neuro-Fuzzy Inference System (ANFIS) merupakan jaringan
adaptif yang berbasis pada sistem kesimpulan fuzzy (fuzzy inference system).
Dengan penggunaan suatu prosedur hybrid learning, ANFIS dapat membangun
suatu mapping input-output yang keduanya berdasarkan pada pengetahuan manusia
(pada bentuk aturan fuzzy if-then) dengan fungsi keanggotaan yang tepat. Sistem
kesimpulan fuzzy yang memanfaatkan aturan fuzzy if-then dapat memodelkan
aspek pengetahuan manusia yang kualitatif dan memberi reasoning processes tanpa
memanfaatkan analisa kuantitatif yang tepat (Jang et al. 1997).
ANFIS dapat bertindak sebagai suatu dasar untuk membangun satu
kumpulan aturan fuzzy if-then dengan fungsi keanggotaan yang tepat, yang
berfungsi untuk menghasilkan pasangan input-output yang tepat. Meetode ANFIS
terbagi menjadi 3 proses yaitu: proses Inisialisasi awal, proses pembelajaran
(learning), dan proses peramalan. Penentuan periode input dan periode training
dilakukan saat inisialisasi awal dimana tiap-tiap periode input memiliki pola atau
pattern yang berbeda. Data yang digunakan untuk proses pembelajaran (traning)
terdiri dari data input, parameter ANFIS, dan data test yang berada pada periode
traning ANFIS.
Training dengan ANFIS menggunakan adalah algoritma belajar hibrida,
dimana dilakukan penggabungan metode Least-squares estimator (LSE) pada alur
maju dan error backpropagation (EBP) pada alur mundur. Pada algoritma belajar
ini nilai parameter premis akan tetap saat alur maju, namun sebaliknya parameter
konsekuen akan terupdate saat alur maju (Jang et al. 1997). Pembelajaran ANFIS
adalah pengubahan parameter fungsi keanggotaan masukan dan keluaran dengan
menggunakan algoritma perambatan balik atau algoritma hybrid. Algoritma hybrid
adalah gabungan antara algoritma backpropagation dan RLSE (Recursive Least
Squares Estimator) yang digunakan untuk memperbaharui parameter premis.
Tujuan Penelitian ini adalah: pertama, untuk memodelkan pindah panas
(suhu), kelembaban dan amonia pada broiler closed house, kedua, untuk
mensimulasikan respon kendali ON-OFF, PID, Fuzzy Logic dan ANFIS suhu,
kelembaban dan amonia pada broiler closed house bagian dari supervisori kendali

78
Penelitian terdahulu yang terkait dengan model dan kendali lingkungan
suhu dan kelembaban di kandang tertutup diantaranya: Ernst (1998) membahas
suhu kandang sebesar 33-350C menggunakan kendali ON-OFF dengan pengukuran
psychrometric. (Weaver 2001) membahas menggunakan kendali ON-OFF pada
kandang ayam dengan suhu 210C dan kelembaban 60% pada musim panas dan
dingin. (Ibrahim 2002) membahas penggunakan kendali ON-OFF yang terjadi dua
musim yaitu musim panas dan musim dingin, musim panas suhu dalam broiler
house 260C dan kelembaban 70%, musim dingin suhu dalam broiler house 34
0C,
kelembaban 70%, dan amonia < 25ppm.
Bahan dan Metode
Bahan yang Digunakan
Lokasi penelitian ini dilaksanakan antara lain di laboratorium Teknik
Bioproses Universitas Tsukuba, Jepang, Laboratorium Kontrol dan Instrumentasi
FATETA IPB dan University of Farm Closed House Cikabayan IPB mulai bulan
Januari 2009 sampai April 2011. Bahan yang digunakan terdiri dari ayam broiler
sebanyak 20.000 ekor, kandang ayam dengan sistem closed house yang ada di
lahan penelitian Cikabayan IPB dengan ukuran panjang x lebar x tinggi adalah 120
m x lebar 12 m x tinggi 2.5 m., pakan ayam, air minum, menggunakan software
matlab versi 7 untuk simulasi kendali suhu, kelembaban dan amonia.
Peralatan yang digunakan meliputi : sensor suhu dan kelembaban SHT75
dan sensor amonia TGS 444. Satu set komputer dan peripheral, thermokopel dan
hybrid recorder, satu set kandang ayam dengan sistem isolasinya, exhaust fan
(Kipas angin) sebanyak 8 buah, cooling pad (unit pendingin) sebanyak 2 buah,
heater (unit pemanas) sebanyak 2 buah, temtron sebanyak 2 buah, tempat air
minum, tempat pakan ayam.
Tahapan penelitian adalah sebagai berikut: a) Melakukan pengukuran
dengan sensor suhu kelembaban dan amonia pada broiler closed house, b)
Memodelkan suhu kelembaban dan amonia pada broiler closed house untuk ayam
broiler, c) Mensimulasikan dengan respon optimal dengan satu modus kendali ON-
OFF, PID, Fuzzy Logic, ANFIS pada broiler closed house untuk ayam broiler.

79
Gambar 3. 13 Perancangan sistem kendali pada Broiler Closed House
Metode Yang Digunakan
Pemodelan Matematika Kendali Suhu Kelembaban dan Amonia dalam
Broiler Closed House
Suhu (T), kelembaban relative (RH) dan amonia (NH3) di dalam kandang
ayam dipengaruhi oleh kondisi lingkungan di dalam juga sedikit pengaruh dari luar
seperti atap, dinding, lantai dan penyekat kandang ayam. Pendekatan model suhu
dan kelembaban disusun dengan mempertimbangkan penempatan sensor-sensor
lingkungan di dalam kandang dan mempertimbangkan faktor yang paling
berpengaruh terhadap perubahan suhu dan kelembaban relatif disekitar penempatan
sensor tersebut.
Gambar 3.14 menggambarkan bahwa broiler closed house mendapatkan
energi iradiasi matahari yang jatuh melalui atap transparan dan melepas panasnya
bersama aliran udara menuju udara di dalam broiler closed house, dinding dan atap.
Dinding, atap, lantai secara konveksi melepas panas ke udara. Bersamaan dengan
iradiasi yang jatuh kea tap, juga terjadi kehilangan panas lewat penetrasi
lingkungan. Dari lingkungan ke udara dalam kandang ayam atau sebaliknya, terjadi
pindah panas dan massa melalui dinding secara konduksi dan konveksi atau aliran.
Asumsi yang digunakan dalm konsep pemodelan suhu dan kelembaban ini
adalah: 1) suhu lantai dan udara dalam kandang ayam seragam, 2) kelembaban
udara dalam kandang ayam seragam, 3) suhu dan kelembaban udara lingkungan
seragam, dan 4) kondisi lingkungan disekitar kandang ayam berikut faktor-faktor
fisika, kimia yang mempengaruhi sebagai hasil interaksi antara linkungan dengan
ayam broiler, 5) Sistem fluida keadaan steady yaitu selang waktu tetap, 6) konveksi
paksa (force convection).
Broiler House
Algoritma Kendali ON-
OFF,PID,Fuzzy Logic,
ANFIS
Algorithm
Heater, Fan,
Cooler
Suhu, Kelembaban,
amonia

80
Gambar 3. 14 Skema konsep pemodelan suhu kelembaban dan amonia dalam
Broiler Closed House
Sehubungan dengan itu, untuk menduga suhu dan kelembaban relative
dalam kandang ayam disusun dalam model matematika. Persamaan dalam bentuk
model matematika untuk menghitung perubahan suhu dalam ruangan kandang
ayam berdasarkan hukum keseimbangan energi sebagai berikut :
Suhu Ruangan (Troom)
……………………………………………………………………..…………..(3.8)
Suhu Lantai (Tfloor)
…………………………………………..(3.9)
Suhu Atap (Troof)
(3.10)
Suhu Dinding (Twall)
(3.11)
Metode ini digunakan untuk mengukur parameter suhu kandang dan
mengambil data sekunder dalam peneltian sebelumnya dan BMG, terdiri dari suhu
ruangan, suhu dinding, suhu lantai, suhu atap, suhu ayam, suhu evavoration
cooling, suhu kipas angin. Pengujian model dilakukan dengan mensimulasi model
perpindahan panas untuk menduga perubahan suhu dan kelembaban dalam broiler
81
closed house yaitu suhu ruangan, suhu lantai, suhu dinidng, suhu atap dan
kelembaban terhadap waktu. Simulasi pindah panas dan massa dijabarkan dalam
bentuk suhu serta kelembaban dalam kandang dilakukan dengan memecahkan
persamaan atur (governing equation) dengan metode Euler’s Finite Difference.
Penyusunan model berdasarkan persamaan perhitungan pindah panas baik
secara konveksi lantai, dinding, atap, konduksi pada atap dan radiasi pada atap.
Selanjutnya melakukan pemodelan matematika terhadap plant untuk mencari
fungsih alih sebagai pengganti pendugaan real-time. Pemodelan berarti
menyatakan sistem dalam dunia nyata (real world) menjadi bentuk persamaan
matematika. Modeling juga dapat diartikan sebagai usaha menirukan kelakuan
proses (real world system) didalam usaha untuk memahaminya. Hal tersebut
dilakukan dengan menyusun hubungan-hubungan fisik dari sistem sesungguhnya
dengan menggunakan hukum-hukum ilmu alam. Dengan pemodelan dapat
perlakuan banyak mengenai suatu sistem tanpa harus menghadirkan sistem
tersebut. Dengan penyusunan model maka sifat (karakteristik) sistem akan lebih
mudah dianalisis/dipelajari. Selain itu modeling merupakan usaha yang tidak
membutuhkan biaya banyak dan resiko yang kecil.
Model matematika dari sistem pemanas ruangan kandang ayam diturunkan
ulang pada bagian ini (Gopal 2003). Prinsip kerja pemanas ruangan dikembangkan
berdasarkan Hukum Termodinamika I dan II. Perpindahan panas pada kasus
pemanasan ruangan adalah memindahkan energi dalam bentuk panas dari suatu
titik yang bersuhu tinggi ke titik yang bersuhu lebih rendah (Djojodihardjo 1985).
Untuk menghangatkan ruangan dibutuhkan suatu fluida (berupa air, udara atau uap)
yang dipanaskan di dalam heater dengan udara ruangan, fluida akan mengalir
kembali lagi ke heater untuk dipanaskan kembali.
Merujuk pada Gambar 3.14, panas yang digunakan untuk menghangatkan
ruangan berasal dari panas laten kondensasi fluida, yaitu suatu panas yang
digunakan oleh tiap satuan fluida untuk mengubah wujudnya. Dalam kasus ini,
kalor yang digunakan fluida adalah kalor uap dan kalor embun. Jika suhu ruangan
sebesar , uap dari fluida akan mengalir dari evavorative cooling masuk ke
dalam ruangan kandang dengan kecepatan aliran mengalirkan panas dalam
ruangan (memanaskan udara dalam ruangan). Perbedaan suhu yang ada
mengakibatkan terjadinya perpindahan panas ayam broiler yang bersuhu ,
82
dinding ruangan yang bersuhu , lantai ruangan yang bersuhu , atap
ruangan yang bersuhu dan udara luar ruangan (disturbance) yang bersuhu
.
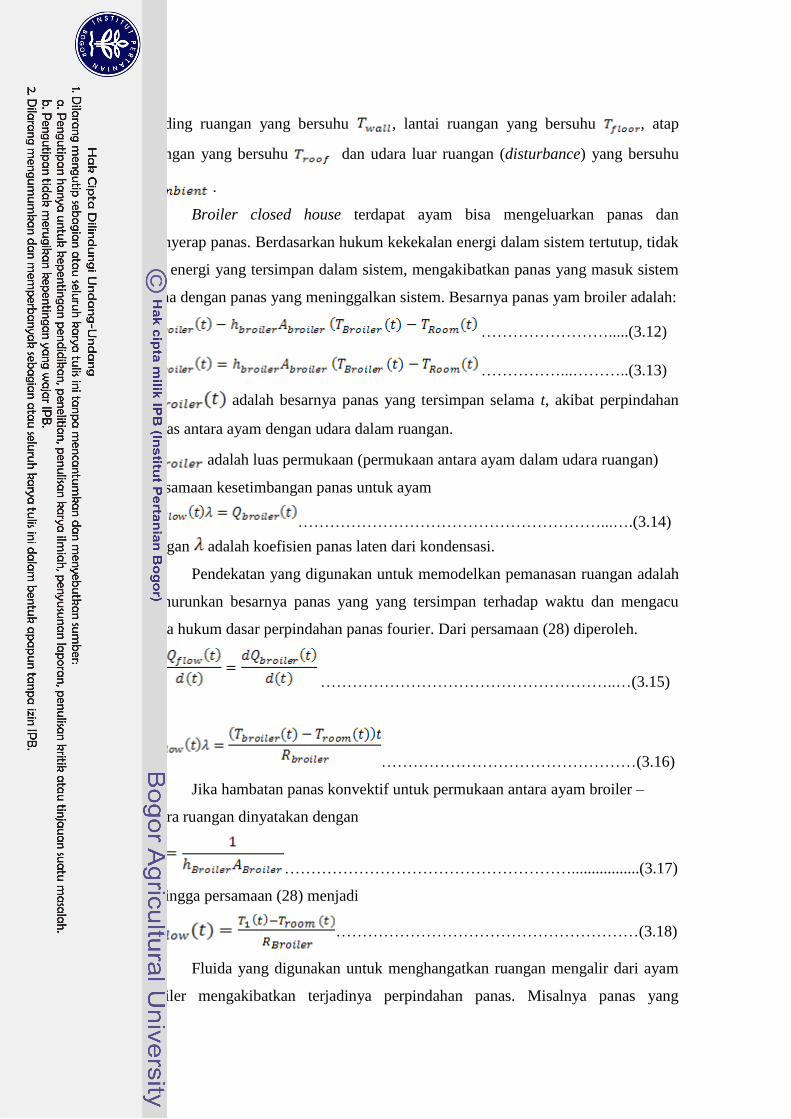
Broiler closed house terdapat ayam bisa mengeluarkan panas dan
menyerap panas. Berdasarkan hukum kekekalan energi dalam sistem tertutup, tidak
ada energi yang tersimpan dalam sistem, mengakibatkan panas yang masuk sistem
sama dengan panas yang meninggalkan sistem. Besarnya panas yam broiler adalah:
…………………….....(3.12)
……………...………..(3.13)
adalah besarnya panas yang tersimpan selama t, akibat perpindahan
panas antara ayam dengan udara dalam ruangan.
adalah luas permukaan (permukaan antara ayam dalam udara ruangan)
Persamaan kesetimbangan panas untuk ayam
…………………………………………………...….(3.14)
dengan adalah koefisien panas laten dari kondensasi.
Pendekatan yang digunakan untuk memodelkan pemanasan ruangan adalah
menurunkan besarnya panas yang yang tersimpan terhadap waktu dan mengacu
pada hukum dasar perpindahan panas fourier. Dari persamaan (28) diperoleh.
………………………………………………..…(3.15)
…………………………………………(3.16)
Jika hambatan panas konvektif untuk permukaan antara ayam broiler –
udara ruangan dinyatakan dengan
……………………………………………….................(3.17)
sehingga persamaan (28) menjadi
…………………………………………………(3.18)
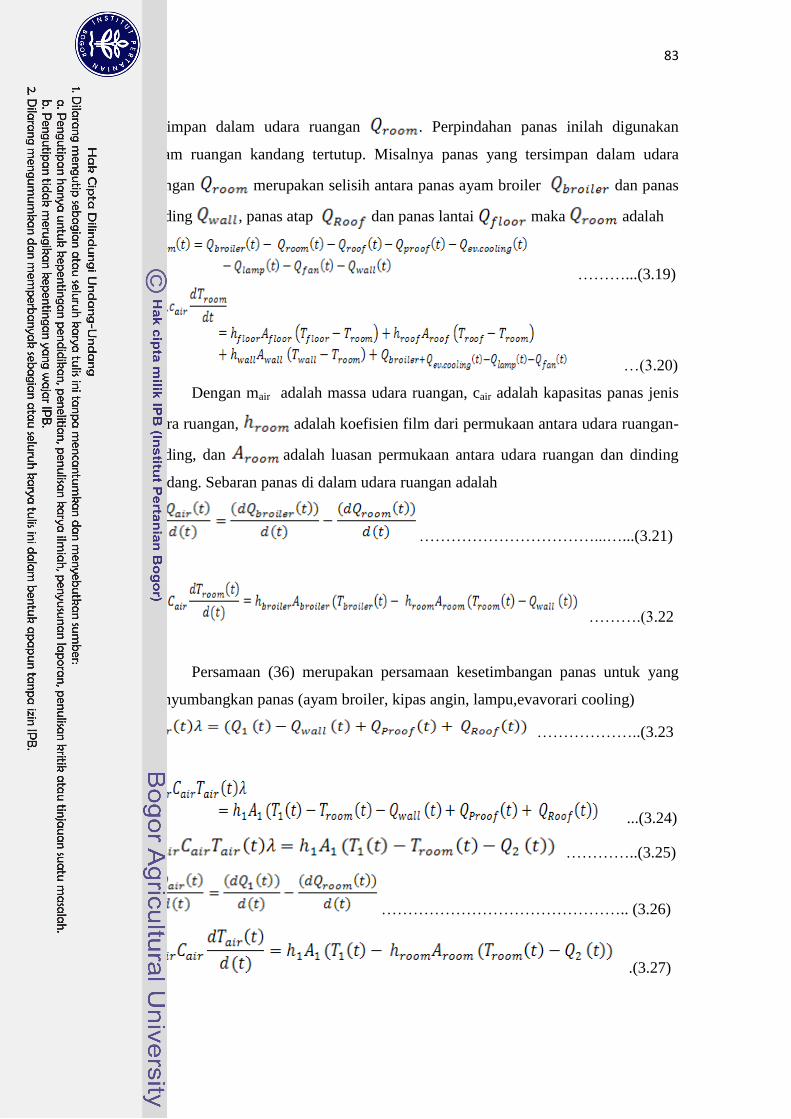
Fluida yang digunakan untuk menghangatkan ruangan mengalir dari ayam
broiler mengakibatkan terjadinya perpindahan panas. Misalnya panas yang
83
tersimpan dalam udara ruangan . Perpindahan panas inilah digunakan
dalam ruangan kandang tertutup. Misalnya panas yang tersimpan dalam udara
ruangan merupakan selisih antara panas ayam broiler dan panas
dinding , panas atap dan panas lantai maka adalah
………...(3.19)
…(3.20)
Dengan mair adalah massa udara ruangan, cair adalah kapasitas panas jenis
udara ruangan, adalah koefisien film dari permukaan antara udara ruangan-
dinding, dan adalah luasan permukaan antara udara ruangan dan dinding
kandang. Sebaran panas di dalam udara ruangan adalah
……………………………...…...(3.21)
……….(3.22
)
Persamaan (36) merupakan persamaan kesetimbangan panas untuk yang
menyumbangkan panas (ayam broiler, kipas angin, lampu,evavorari cooling)
………………..(3.23
)
...(3.24)
…………..(3.25)
……………………………………….. (3.26)
.(3.27)
84
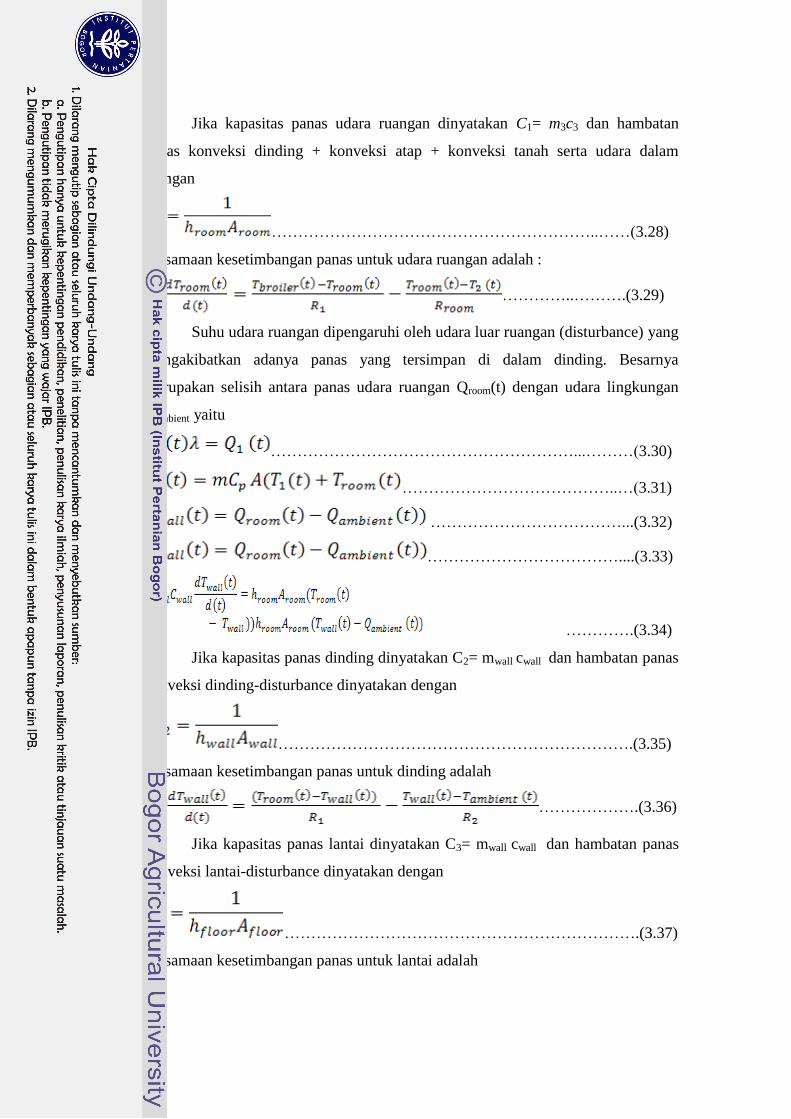
Jika kapasitas panas udara ruangan dinyatakan C1= m3c3 dan hambatan
panas konveksi dinding + konveksi atap + konveksi tanah serta udara dalam
ruangan
……………………………………………………..……(3.28)
Persamaan kesetimbangan panas untuk udara ruangan adalah :
…………..……….(3.29)
Suhu udara ruangan dipengaruhi oleh udara luar ruangan (disturbance) yang
mengakibatkan adanya panas yang tersimpan di dalam dinding. Besarnya
merupakan selisih antara panas udara ruangan Qroom(t) dengan udara lingkungan
Qambient yaitu
…………………………………………………...………(3.30)
…………………………………..…(3.31)
………………………………...(3.32)
………………………………....(3.33)
………….(3.34)
Jika kapasitas panas dinding dinyatakan C2= mwall cwall dan hambatan panas
konveksi dinding-disturbance dinyatakan dengan
………………………………………………………….(3.35)
Persamaan kesetimbangan panas untuk dinding adalah
……………….(3.36)
Jika kapasitas panas lantai dinyatakan C3= mwall cwall dan hambatan panas
konveksi lantai-disturbance dinyatakan dengan
………………………………………………………….(3.37)
Persamaan kesetimbangan panas untuk lantai adalah
85
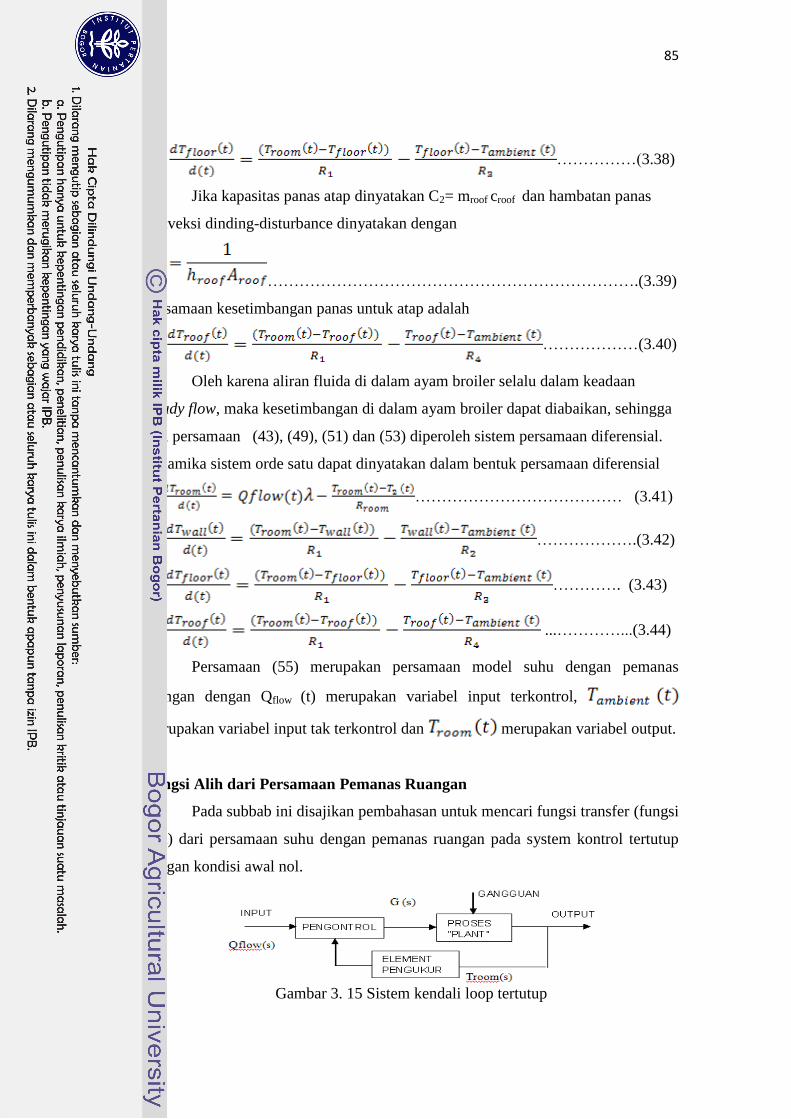
……………(3.38)
Jika kapasitas panas atap dinyatakan C2= mroof croof dan hambatan panas
konveksi dinding-disturbance dinyatakan dengan
…………………………………………………………….(3.39)
Persamaan kesetimbangan panas untuk atap adalah
………………(3.40)
Oleh karena aliran fluida di dalam ayam broiler selalu dalam keadaan
steady flow, maka kesetimbangan di dalam ayam broiler dapat diabaikan, sehingga
dari persamaan (43), (49), (51) dan (53) diperoleh sistem persamaan diferensial.
Dinamika sistem orde satu dapat dinyatakan dalam bentuk persamaan diferensial
………………………………… (3.41)
……………….(3.42)
…………. (3.43)
...…………...(3.44)
Persamaan (55) merupakan persamaan model suhu dengan pemanas
ruangan dengan Qflow (t) merupakan variabel input terkontrol,
merupakan variabel input tak terkontrol dan merupakan variabel output.
Fungsi Alih dari Persamaan Pemanas Ruangan
Pada subbab ini disajikan pembahasan untuk mencari fungsi transfer (fungsi
alih) dari persamaan suhu dengan pemanas ruangan pada system kontrol tertutup
dengan kondisi awal nol.
Gambar 3. 15 Sistem kendali loop tertutup
86
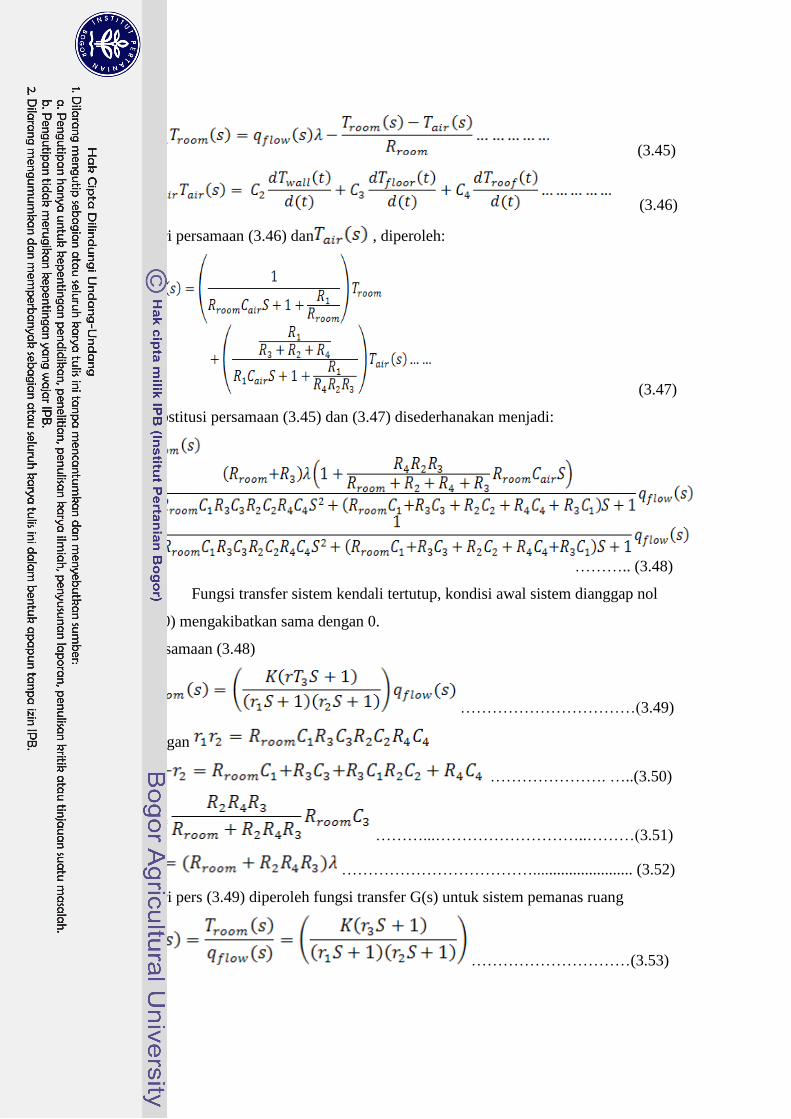
(3.45)
(3.46)
Dari persamaan (3.46) dan , diperoleh:
(3.47)
Substitusi persamaan (3.45) dan (3.47) disederhanakan menjadi:
……….. (3.48)
Fungsi transfer sistem kendali tertutup, kondisi awal sistem dianggap nol
(t=0) mengakibatkan sama dengan 0.
Persamaan (3.48)
……………………………(3.49)
dengan
…………………. …..(3.50)
………...………………………..………(3.51)
………………………………......................... (3.52)
Dari pers (3.49) diperoleh fungsi transfer G(s) untuk sistem pemanas ruang
…………………………(3.53)

87
Selanjutnya dicari transformasi laplace dari keluaran yaitu:
dari invers Laplace dari tersebut adalah
.
Dalam hal ini maka fungsi alih untuk suhu kandang ayam tertutup sebagai
berikut:
……………………….. (3.54)
Untuk mengetahui kinerja sistem, kemudian dibuat grafik dari keluaran
, disetelah mengetahui grafik dari sistem, diberikan aksi control pada
sistem tersebut dengan menggunakan model kendali ON-OFF, PID, Fuzzy Logic,
dan ANFIS.
Asumsi , Kondisi Awal dan Kondisi batas Dalam Perhitungan Simulasi Aliran
Udara:
Asumsi Kandang Ayam
a. Udara tidak termampatkan (incompressible), ρ konstan
b. Bilangan Prantilasi udara konstan (panas jenis, konduktivitas dan viskositas
udara konstan)
c. Udara bergerak dalam keadaan steady
d. Udara lingkungan dianggap konstan selama simulasi yaitu pada nilai 300C
e. Aliran udara dianggap laminier, didasarkan oleh bilangan Re= 1698.
Aliran laminar jika Re<2000 (Holman 1997).
Model Matematika Kendali Kelembaban dalam Broiler Closed House
Pemodelan kelembaban dalam ruangan kandang ayam tertutup asumsi
terdapat pada gambar 3.14 sebagaimana juga di bahas dalam pemodelan suhu,
maka persamaan kelembaban sebagai berikut:
…………… (3.55)
………..(3.56)
……………….(3.57)
……………….(3.58)
di mana:

88
mr = Laju aliran massa dalam ruang broiler closed house
mumk= Laju aliran massa udara masuk dan keluar broiler closed house
Shum = Pelembab = Qevaporation Cooling
ρ = Angkasa kepadatan ( 1.2 g m/3),
Cp = Panas jenis udara ( 1006 J ( kg K)/1),
Persamaan keseimbangan energi (energy balance) maka model kelembaban dalam
ruangan tertutup, dinyatakan dalam persamaan :
Total dan fungsi- fungsi psikometrik adalah sebagai berikut:
1. Koefisien pindah panas total
……………………………………………………………...(3.59)
2. Kelembaban mutlak
……………………………………………………………...(3.60)
3. Tekanan uap pada suhu T
………………………………………...……………...……(3.61)
4. Kelembaban relative (RH)
…………………………………………………...……………....(3.62)
5. Tekanan uap jenuh pada suhu jenuh T
Ps= RxExp(A+BT+CT2+DT
3+ET
4)/(FT-GT
2)……………………….…....(6.63)
Dimana konstanta-konstanta adalah sebagai berikut :
R= 22105649,25
A = -27405,526
B = 97 ,5413
C = 0,146244
D = 0,000126
E = 0,0000000485
F = 4,34903
G= 0,00394
Patm= 101325Pa

89
Perubahan RH dalam ruangan dihitung berdasarkan asumsi bahwa udara
ruangan berasal dari udara luar yang dipanaskan oleh bangunan kandang ayam.
Udara tersebut tidak mengalami penambahan uap air karena air penguapan dari
ayam brolier diasumsikan semuanya tersedot keluar. Tekanan uap jenuh (Ps)
dihitung berdasarkan suhu mutlak lingkungan (Ta) dengan persamaan berikut :
Ps = 22105649.25 exp (A1/B1) ……………………………………….…….(3.64)
Ps = 22105649.25 exp (27405.526 + 97.5413 T - 0.14244 T2 - 1.2558E-4 T
3 -
0.45852E-7 T4)/(4.34903 T - 0.003938 T
2) …………………...........................(3.65)
A1 = -27405.526 + 97.5413 T - 0.14244 T2 - 1.2558E-4 T
3 -0.45852E-7 T
4 (3.66)
B1 = 4.34903 T - 0.003938 T2 ………..……………………………………...(3.67)
Nilai Psr1 untuk udara pengering di dalam ruang ERK dihitung berdasarkan
suhu mutlak ruang ERK (Tr1) dengan persamaan (74)-(76) diatas, sedangkan nilai
Pv dicari dengan persamaan berikut :
Pv = RHa x Ps…………………………………………………….…(3.68)
dimana RHa adalah nilai kelembaban lingkungan. Karena tidak ada penambahan
uap air (nilai H tetap) maka Pvr! sama dengan Pv lingkungan, sehingga RH udara
pengering didapatkan :
RHr1 = Pv/Psr1 (3.69)
Model Matematika Kendali Kelembaban dalam Ruangan Kandang Ayam
(3.70)
(3.71)
(3.72)
(3.73)
(3.74)
Apabila ruangan lembab tersimpan dalam ruangan merupakan selisih
antara panas broiler dan panas dinding maka adalah:

90
(3.75)
(3.76)
Karena aliran fluida dalam keadaan steady
(3.77)
(3.78)
Maka persamaan model RH pada broiler closed house merupakan variabel
input terkendali, merupakan variabel input tak terkendali dan
merupakan variabel output.
(3.79)
(3.80)
(3.81)
Fungsi transfer kelembaban kendali tertutup, kondisi awal sistem dianggap
nol (t=0) mengakibatkan Hr ambient atau kelembaban lingkungan = 0
(3.82)
Dengan
(3.83)
(3.84)
(3.85)
(3.86)
Dari pers (4.11) diperoleh fungsi transfer G(s) untuk sistem pemanas ruang

91
(3.87)
Selanjutnya dicari transformasi laplace dari keluaran yaitu
dari invers Laplace dari tersebut
adalah .
Untuk mengetahui kinerja sistem, kemudian dibuat grafik dari keluaran
, disetelah mengetahui grafik dari sistem, diberikan aksi kendali pada
sistem tersebut dengan menggunakan model kendali ON-OFF, PID, Fuzzy Logic,
ANFIS.
Fungsi Alih Untuk Kelembaban (RH)
(3.88)
(3.89)
Model Matematika Kendali Amonia dalam Ruangan Kandang Ayam
Fungsi NH3 = fungsi (NH3m,V,Tlantai, NHsource,A)
General mass transfer flux equation J = Km (Cg, 0 - Cg, ∞ ) (3.90)
Mass balance equation J = (Q/A) Cg, ∞ (3.91)
Subtitusi kedua persamaan diatas J = ((Q/A)-1 + Km-1)-1 Cg, 0 (3.92)
(3.93)
(3.94)
– (3.95)
– (3.96)
Fungsi Alih NH3 = NH3 room (amonia ruangan)/ Qc (broiler +
kecepatan udara) atau fungsi Alih NH3 = NH3 room (amonia ruangan)/Q flow
(3.97)
Dari fungsi alih suhu, kelembaban dan amonia di atas di masukan ke dalam
kendali lingkungan broiler closed house. Acuan optimal di peroleh dari parameter
lingkungan optimal yang didasarkan pada hasil maksimal produk yang dipanen
92
baik secara kualitas, kuantitas maupun selera tergnatung kondisi produk yang
diinginkan. Kondisi optimal tidak selalu berarti lingkungan diharapkan
meningkatkan pertumbuhan ayam. Terkadang cekaman (stress) lingkungan dapat
menghambat pertumbuan tetapi kualitas, seperti perlakuan evavorting cooling
terhadap ayam broiler yang dapat meningkatkan kondisi nayaman, hal ini termasuk
kondisi optimal yang dikaitkan dengan peningkatan kualitas. Parameter optimal
kendali dihubungkan dengan bias (error) yang minimum dan performansi kendali
yang stabil yang terdiri dari kendali ON-OFF, PID, FUZZY, ANFIS.
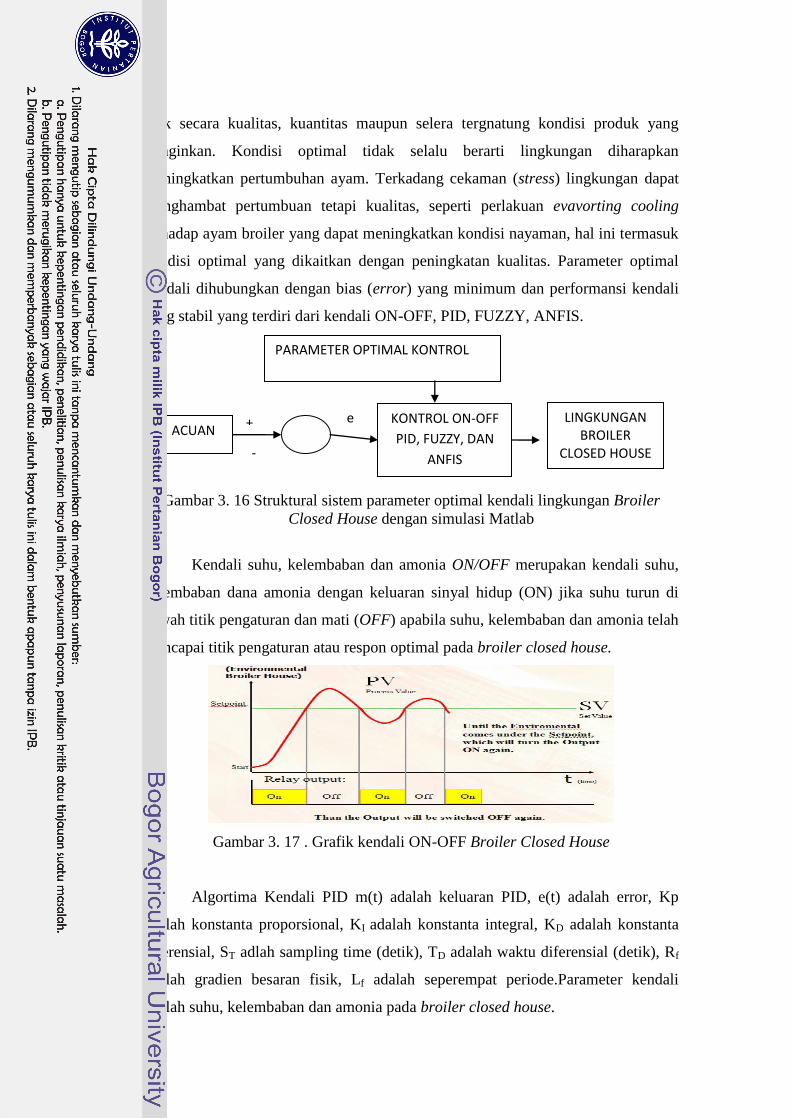
Gambar 3. 16 Struktural sistem parameter optimal kendali lingkungan Broiler
Closed House dengan simulasi Matlab
Kendali suhu, kelembaban dan amonia ON/OFF merupakan kendali suhu,
kelembaban dana amonia dengan keluaran sinyal hidup (ON) jika suhu turun di
bawah titik pengaturan dan mati (OFF) apabila suhu, kelembaban dan amonia telah
mencapai titik pengaturan atau respon optimal pada broiler closed house.
Gambar 3. 17 . Grafik kendali ON-OFF Broiler Closed House
Algortima Kendali PID m(t) adalah keluaran PID, e(t) adalah error, Kp
adalah konstanta proporsional, KI adalah konstanta integral, KD adalah konstanta
diferensial, ST adlah sampling time (detik), TD adalah waktu diferensial (detik), Rf
adalah gradien besaran fisik, Lf adalah seperempat periode.Parameter kendali
adalah suhu, kelembaban dan amonia pada broiler closed house.
ACUAN KONTROL ON-OFF
PID, FUZZY, DAN
ANFIS
LINGKUNGAN BROILER
CLOSED HOUSE
+
-
e
PARAMETER OPTIMAL KONTROL
93
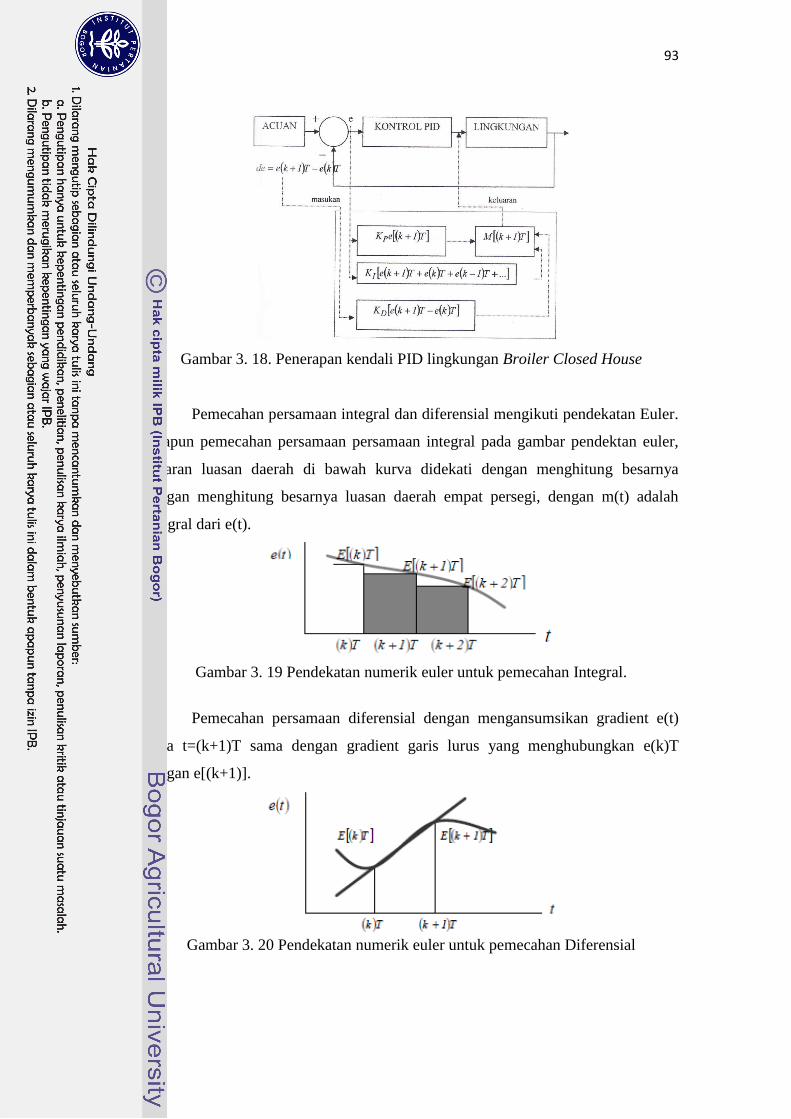
Gambar 3. 18. Penerapan kendali PID lingkungan Broiler Closed House
Pemecahan persamaan integral dan diferensial mengikuti pendekatan Euler.
Adapun pemecahan persamaan persamaan integral pada gambar pendektan euler,
besaran luasan daerah di bawah kurva didekati dengan menghitung besarnya
dengan menghitung besarnya luasan daerah empat persegi, dengan m(t) adalah
integral dari e(t).
Gambar 3. 19 Pendekatan numerik euler untuk pemecahan Integral.
Pemecahan persamaan diferensial dengan mengansumsikan gradient e(t)
pada t=(k+1)T sama dengan gradient garis lurus yang menghubungkan e(k)T
dengan e[(k+1)].
Gambar 3. 20 Pendekatan numerik euler untuk pemecahan Diferensial
94
Algortima Sistem Fuzzy Logic pada Broiler Closed House
a. Error dan dError Suhu (T)/Amonia (NH3)
Error_T/NH3/=data_T/RH/ –Set_point T/NH3/
dError-T/NH3=Error_T/RH/(1)-Error_T/NH3/
Jun Yan menentukan variabel masukan kendali fuzzy akan diseleksi sebagai
kesalahan (error, E) dan perubahan kesalahan (delta error, dE). Sinyal E
didapatkan dari pengurangan keluaran sistem terhadap setpoint, sedangkan
sinyal dE didapatkan dari pengurangan sinyal error saat ini dengan sinyal error
sebelumnya. Kedua sinyal tersebut diolah oleh pengendali fuzzy. Keluaran
merupakan variasi perintah yang disusun sebagai berikut:
Jika keluaran sama dengan nilai yang diinginkan dan perubahan kesalahan
sama dengan nol, maka keluaran yang sebelumnya dipertahankan.
Jika keluaran tidak sesuai dengan yang diinginkan maka aksi kendali
tergantung pada nilai error dan perubahan error.
b. Fuzzifikasi Suhu Kelembaban dan Amonia (Penentuan derajat keanggotaan)
Proses ini dilakukan dengan memetakan input suhu dan amonia pada selang
nilai yang dapat terjadi secara ril (dapat mengacu kedata penelitian sebelumnya
tentang selang nilai suhu, kelembaban dan amonia udara). Pada rancangan ini
universe of discourse nilai suhu yang digunakan adalah 25-300C
dan nilai
kelembaban sebesar 15-90%. Sedangkan selang nilai derajat keanggotaan
(degree of membership) secara umum ditetapkan 0 -1. Keterangan (label) yang
digunakan adalah negatif besar (NBE), negarif sedang (NSE), Negatif kecil
(NKE), Zero (ZE), positif kecil (PKE), positif sedang (PSE) dan positif besar
(PBE) yang menggambarkan kondisi suhu dan kelembaban dari kriteria rendah
ke kriteria tinggi secara proporsional. Sedangkan bangun yang digunakan untuk
mempresentasikan batas scope/domain adalah bentuk segitiga dan trapezium.
Bangu trapezium terjadi batas bawah dan batas atas domain sedangkan bangun
segitiga terjadi diantara kedua bangun trapezium tersebut.
Nilai analog (crisp input) yang digunakan untuk mencari derajat keanggotaan
adalah NBE=-0.75, NSE=-0.05, NKE=-0,25, ZE=0, PKE=0,25, PSE = 0,5 dan
PBE = 0,75. Scope domain dalam konsep ini adalah bangun yang dibatasi oleh
masing-masing crisp input yakni bangun trapezium pada nilai <=-0,75 atau
bangun segitiga pada nilai 0 – 0,25.
95
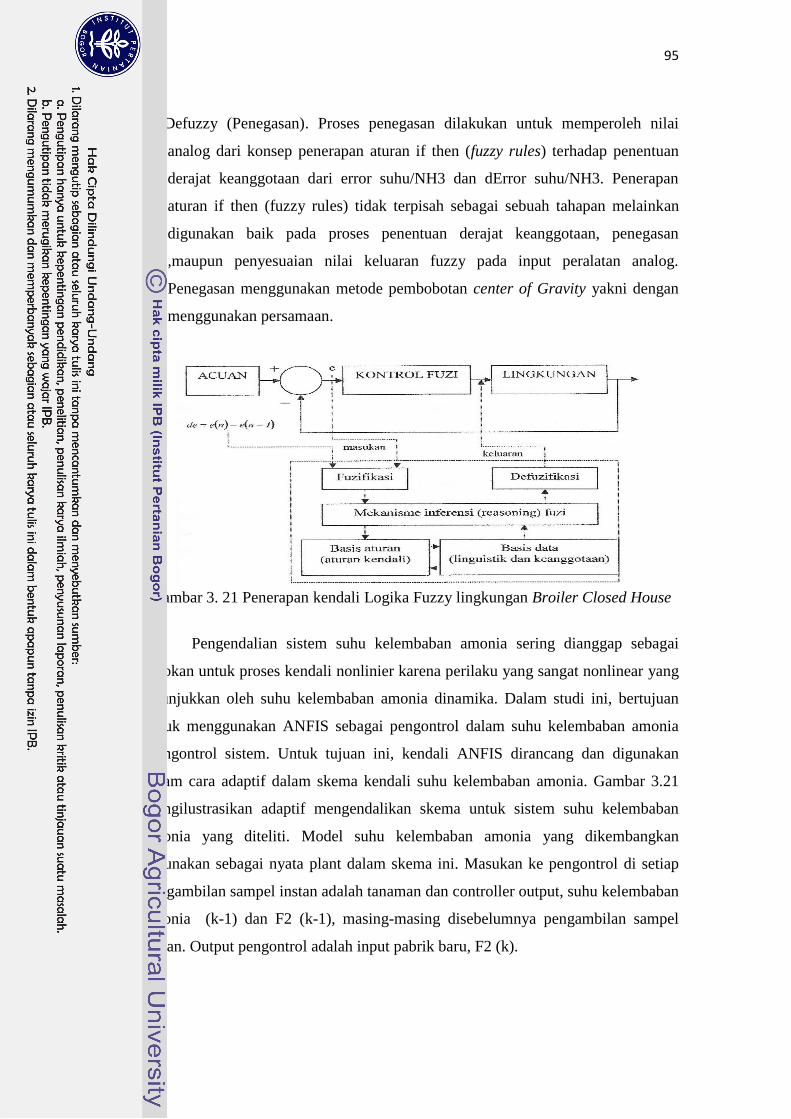
c. Defuzzy (Penegasan). Proses penegasan dilakukan untuk memperoleh nilai
analog dari konsep penerapan aturan if then (fuzzy rules) terhadap penentuan
derajat keanggotaan dari error suhu/NH3 dan dError suhu/NH3. Penerapan
aturan if then (fuzzy rules) tidak terpisah sebagai sebuah tahapan melainkan
digunakan baik pada proses penentuan derajat keanggotaan, penegasan
,maupun penyesuaian nilai keluaran fuzzy pada input peralatan analog.
Penegasan menggunakan metode pembobotan center of Gravity yakni dengan
menggunakan persamaan.
Gambar 3. 21 Penerapan kendali Logika Fuzzy lingkungan Broiler Closed House
Pengendalian sistem suhu kelembaban amonia sering dianggap sebagai
patokan untuk proses kendali nonlinier karena perilaku yang sangat nonlinear yang
ditunjukkan oleh suhu kelembaban amonia dinamika. Dalam studi ini, bertujuan
untuk menggunakan ANFIS sebagai pengontrol dalam suhu kelembaban amonia
mengontrol sistem. Untuk tujuan ini, kendali ANFIS dirancang dan digunakan
dalam cara adaptif dalam skema kendali suhu kelembaban amonia. Gambar 3.21
mengilustrasikan adaptif mengendalikan skema untuk sistem suhu kelembaban
amonia yang diteliti. Model suhu kelembaban amonia yang dikembangkan
digunakan sebagai nyata plant dalam skema ini. Masukan ke pengontrol di setiap
pengambilan sampel instan adalah tanaman dan controller output, suhu kelembaban
amonia (k-1) dan F2 (k-1), masing-masing disebelumnya pengambilan sampel
instan. Output pengontrol adalah input pabrik baru, F2 (k).

96
Gambar 3. 22 Penerapan kendali ANFIS lingkungan Broiler Closed House
Struktur ANFIS merupakan mekanisme penalaran fuzzy Sugeno atau
arsitektur jaringan syaraf feed-forward. Struktur ANFIS terdiri dari lima lapisan
yang tiap-tiap lapisan mempunyai fungsi-fungsi tertentu. Simpul kotak yang ada
pada Gambar 3.22 menyatakan simpul adaptif, yang yang parameternya dapat
berubah dengan pembelajaran, sedangkan lingkaran menyatakan simpul non
adaptif yang nilainya tetap.
Gambar 3. 23. Struktur ANFIS
Sumber: (Jang 2003)
Menurut (Jang 2003) Struktur ANFIS diatas dengan bentuk umum dua
aturan fuzzy if-then seperti yang ditunjukkan dengan persamaan sebagai berikut:
Lapisan 1. Semua simpul pada lapisan ini adalah simpul adaptif (parameter dapat
berubah) denganfungsi simpul:
O x l i A = μ untuk I = 1, 2 atau …………………………………………….(3.98)
Ol,i =μ Bi−2 ( y) untuk I = 3, 4 ……………………………………….……..(3.99)
dengan x dan y adalah masukan pada simpul i, Ai (atau Bi-2) yang merupakan
variable linguistic (seperti ‘besar’ atau ‘kecil’). Dengan kata lain O1,i adalah fungsi

97
keanggotaan masing-masing dari sebuah set fuzzy (A dan B) dengan derajat
keanggotaan yang ditentukan oleh input x dan y. Simpul O1,i berfungsi untuk
menyatakan derajat keanggotaan tiap masukan terhadap himpunan fuzzy A dan B.
Bentuk fungsi keanggotaan pada layer atau lapisan pertama dapat berbentuk
misalnya fungsi keanggotaan gauss, yang dapat ditunjukkan dalam bentuk :
………………………………………….(3.100)
dimana {ai ,bi} adalah parameter yang dapat diubah-ubah (parameter adaptif).
Selama harga dari parameter ini berubah-ubah, fungsi keanggotaan bell akan
bervariasi bergantung pada parameter yang berubah, sehingga fungsi keanggotaan
untuk set fuzzy (A dan B) akan bervariasi. Parameter-parameter pada lapisan ini
disebut sebagai parameter premis.
Lapisan 2. Semua simpul pada lapisan ini adalah non adaptif (parameter tetap).
Fungsi simpul ini adalah
mengalikan setiap sinyal masukan yang datang.
…………..………………………(3.101)
ini menunjukkan banyaknya aturan yang dibentuk. Fungsi perkalian yang
digunakan adalah interpretasi kata hubung AND dengan menggunakan operator
tnorm.
Lapisan 3. Setiap simpul pada lapisan ini adalah simpul nonadaptif yang
menampilkan fungsi normalisasi kekuatan pengaruh (normalized firing strength)
yaitu rasio keluaran simpul ke-i pada lapisan sebelumnya terhadap seluruh keluaran
lapisan sebelumnya, dengan bentuk fungsi simpul:
………………….…………………….(3.102)
Apabila dibentuk lebih dari dua aturan, fungsi dapat diperluas dengan membagi wi
dengan jumlah total w untuk semua aturan.
Lapisan 4. Setiap simpul pada lapisan ini adalah simpul adaptif dengan fungsi
simpul:
…………...………………………..(3.103)
98
dengan i w adalah derajat perngaktifan ternormalisasi dari lapisan 3 dan parameter
{pi , qi ri}menyatakan parameter yang adaptif Parameter lapisan ini dinamakan
parameter konsekuen.
Lapisan 5. Pada lapisan ini hanya ada satu simpul tetap yang fungsinya untuk
menjumlahkan semua masukan. Fungsi simpul:
…………………………..………………….(3.104)
Hasil dan Pembahasan
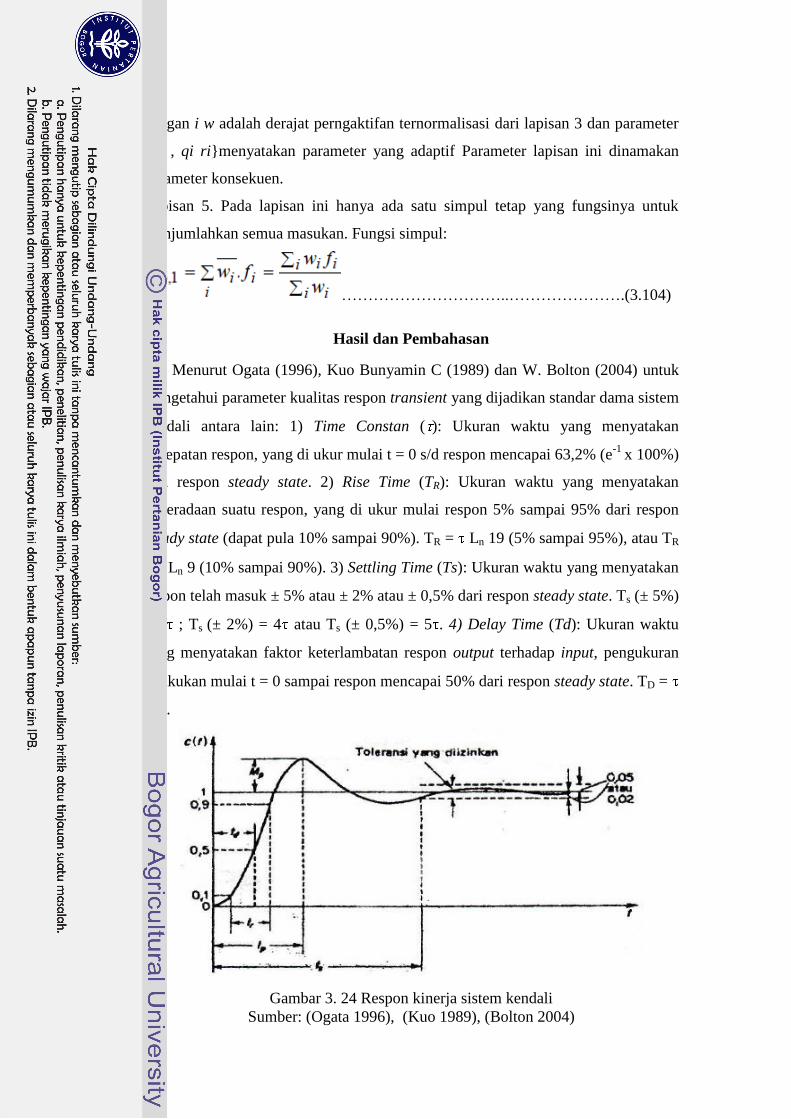
Menurut Ogata (1996), Kuo Bunyamin C (1989) dan W. Bolton (2004) untuk
mengetahui parameter kualitas respon transient yang dijadikan standar dama sistem
kendali antara lain: 1) Time Constan ( ): Ukuran waktu yang menyatakan
kecepatan respon, yang di ukur mulai t = 0 s/d respon mencapai 63,2% (e-1
x 100%)
dari respon steady state. 2) Rise Time (TR): Ukuran waktu yang menyatakan
keberadaan suatu respon, yang di ukur mulai respon 5% sampai 95% dari respon
steady state (dapat pula 10% sampai 90%). TR = Ln 19 (5% sampai 95%), atau TR
= Ln 9 (10% sampai 90%). 3) Settling Time (Ts): Ukuran waktu yang menyatakan
respon telah masuk ± 5% atau ± 2% atau ± 0,5% dari respon steady state. Ts (± 5%)
= 3 ; Ts (± 2%) = 4 atau Ts (± 0,5%) = 5 . 4) Delay Time (Td): Ukuran waktu
yang menyatakan faktor keterlambatan respon output terhadap input, pengukuran
dilakukan mulai t = 0 sampai respon mencapai 50% dari respon steady state. TD =
Ln2.
Gambar 3. 24 Respon kinerja sistem kendali
Sumber: (Ogata 1996), (Kuo 1989), (Bolton 2004)

99
Parameter di atas digunakan untuk mengetahui respon kendali pada broiler
closed house untuk ayam broiler skenario starter, grower, finisher dengan
menggunakan modus kendali ON-OFF, PID, Fuzzy Logic dan ANFIS.
Gambar 3. 25 Simulink tool matlab kendali ON-OFF
Gambar 3. 26 Simulink tool Matlab kendali PID
Gambar 3. 27 Simulink tool Matlab kendali Logika Fuzzy

100
Gambar 3. 28 Simulink tool Matlab kendali ANFIS
Simulasi Kendali pada Broiler Closed House Bagian dari Supervisori Kendali
Sistem kendali broiler closed house dipengaruhi oleh konveksi, konduksi,
dan iradiasi dengan menggunakan modus kendali yang dapat menyesuaikan dengan
kondisi iklim dan lingkungan yang ada. Untuk satu variabel menggunakan modus
kendali ON-OFF, PID, Fuzzy Logik, ANFIS dengan salah satu parameter kendali
suhu, kelembaban dan amonia pada broiler closed house yang merupakan bagian
dari sistem supervisori kendali. Suhu kelembaban dan amonia dikendalikan pada
waktu pagi, siang dan sore menggunakan ON-OFF, PID,Fuzzy Logik dan ANFIS
dari starter, grower dan finisher.
Simulasi kendali pada kandang ayam dalam penelitian ini masih
menggunakan satu kandang ayam dengan 3 skenario waktu pada masa starter,
grower dan finisher. Penelitian selanjutnya menggunakan beberapa broiler closed
house. Untuk setpoin 29-300C adalah starter, set poin 29
0C adalah grower, set
poin 280C adalah finisher. Pengendali suhu dan kelembaban pada broiler closed
house pada ayam broiler menggunakan metode swa-tala (self tuning) kendali PID.
Pengujian dilakukan dengan uji respon variable input, uji tracking set point.
Pengujian respon dilakukan pada mesin kendali yang dimodelkan dalam bentuk
fungsi alih dengan input-an dari konstanta pada simulink Matlab. Pengujian
tracking set point pertama pada suhu dilakukan dengan merubah nilai masukan
sebesar 300C, 29
0C, 28
0C, 27
0C,26
0C,25
0C,24
0C dan nilai masukan kelembaban
sebesar 70%, 60%, 50% untuk kendali PD dan PID serta nilai masukan ammonia <
10 ppm untuk kendali ON OFF, PID, Fuzzy Logic dan ANFIS.
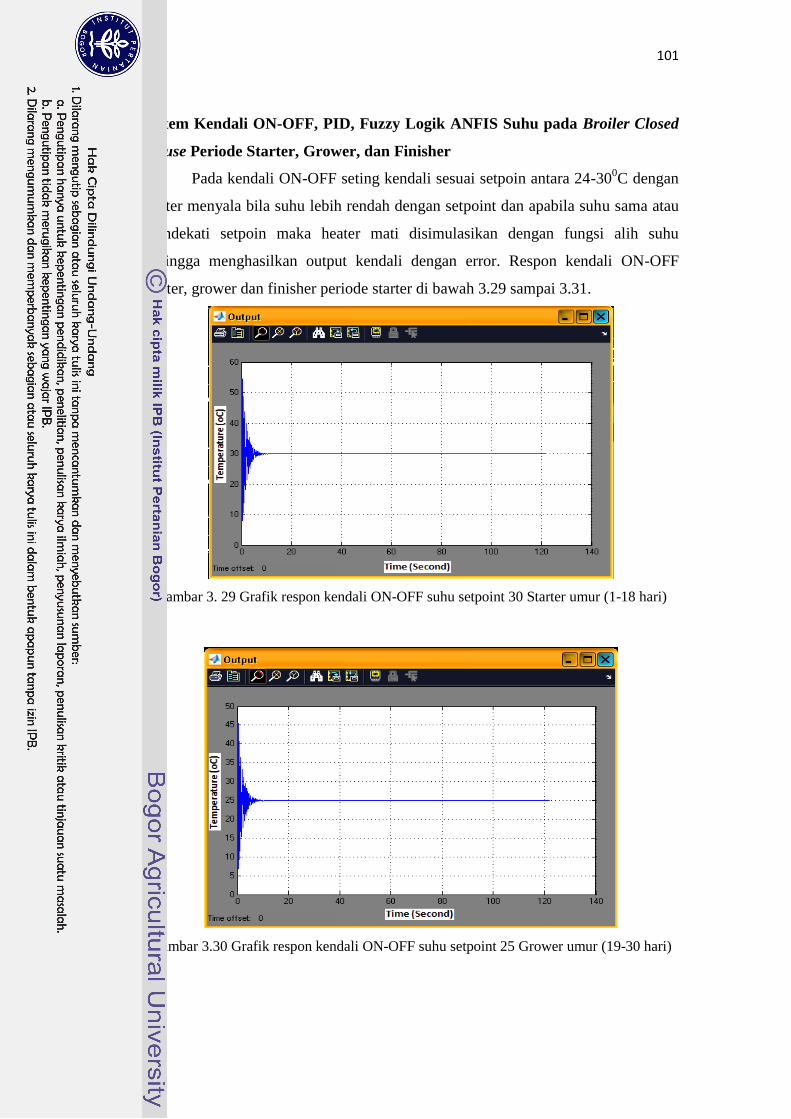
101
Sistem Kendali ON-OFF, PID, Fuzzy Logik ANFIS Suhu pada Broiler Closed
House Periode Starter, Grower, dan Finisher
Pada kendali ON-OFF seting kendali sesuai setpoin antara 24-300C dengan
heater menyala bila suhu lebih rendah dengan setpoint dan apabila suhu sama atau
mendekati setpoin maka heater mati disimulasikan dengan fungsi alih suhu
sehingga menghasilkan output kendali dengan error. Respon kendali ON-OFF
starter, grower dan finisher periode starter di bawah 3.29 sampai 3.31.
Gambar 3. 29 Grafik respon kendali ON-OFF suhu setpoint 30 Starter umur (1-18 hari)
Gambar 3.30 Grafik respon kendali ON-OFF suhu setpoint 25 Grower umur (19-30 hari)

102
Gambar 3. 31 Grafik respon kendali ON-OFF suhu setpoint 23
0C Finisher (31-46 hari)
Berdasarkan grafik respon kendali ON-OFF maka respon transien adalah
sebagai berikut:
Tabel 3. 4 Respon Kendali ON OFF pada broiler closed house untuk ayam broiler
Periode Setpoint
Waktu
Tunda
(Td)
(detik)
Waktu
Penetap
(Ts)
(detik)
Waktu
Naik (Tr)
(detik)
Persen
Lonjakan
(Os) (%)
Error steady
state (Ess) (%)
Starter 30 0.936 8.7439 0.0978 78.725 0.0311
Starter 29 0.092 8.8055 0.0948 78.408 0.0661
Starter 28 0.0939 8.999 0.097 77.993 0.067
Starter 27 0.0941 8.9078 -0.233 77.488 0.0514
Starter 26 0.0943 8.8003 0.0979 77.565 0.0200
Grower 25 0.0945 8.7406 0.096 78.398 0.0918
Grower 24 0.0946 9.9762 0.0927 79.242 0.0525
Finisher 23 0.0945 9.966 0.0954 78.245 0.0454
Kendali PID Suhu pada Broiler Closed House untuk Ayam Broiler Periode
Starter, Grower dan Finisher
Pengontrol Proporsional menurunkan daya rata-rata yang sedang diberikan
pada pemanas ketika suhu mencapai titik penyetelan. Proses ini akan melambatkan
pemanasan, sehingga tidak akan melampaui titik penyetelan tetapi akan mencapai
titik penyetelan dan mempertahankan suhu agar tetap konstan. Pengontrol
proporsional mengijinkan kendali variabel proses yang lebih ketat karena
keluarannya dapat mengambil harga berapapun antara sepenuhnya ON dan
sepenuhnya OFF, tergantung pada magnitude dari sinyal error.
Fungsi dari laju (derivatif) memperpendek waktu yang diambil suhu
pemanas untuk menstabilkan mendekati titik penyetelan. Fungsi integral (reset)

103
membatasi setiap penggantian kerugian dari titik penyetelan suhu. Pengontrol PID
mempunyai kemampuan mencocokkan aksi kendalinya pada konstanta waktu
proses tertentu untuk menghadapi perubahan proses setiap waktu. Kendali PID
mengubah besarnya sinyal keluaran pada cara yang ditentukan secara matematis
yang mempertimbangkan besarnya error dan laju perubahan sinyal.
Adapun metode yang digunakan untuk mencari konstanta PID adalah
Ziegler-nichols dengan menggunakan fasilitas sisotool matlab.
(3.105)
Jika direpresentasikan dalam transformasi laplace, bentuk kendali ini
menjadi :
(3.106)
Respon kendali PID suhu pada broiler closed house dengan simulasi periode
starter, grower dan finisher ditunjukkan pada gambar di bawah ini adalah:
Simulasi kendali PID (P=20,I=10,D=1) pada Broiler Closed House Periode
Starter Umur (1-18 Hari)
Gambar 3. 32 Respon kendali PID suhu setpoin 30
0C Starter umur (1-18 hari)

104
Gambar 3. 33 Respon kendali PID suhu setpoin 24
0C Grower umur (19-30 hari)
Gambar 3. 34 Respon kendali PID suhu setpoin 22
0C Finisher umur (31-46 hari)
Respon Kendali PID Kelembaban pada Broiler Closed House dengan Nilai
P=20, I=10 dan D=1
Tabel 3. 5 Respon kendali PID suhu pada Broiler Closed House untuk ayam broiler Periode
Setpoint
Waktu
Tunda
(Td)
Waktu
Penetap
(Ts)
Waktu
Naik
(Tr)
Persen
Lonjakan
(Os)
Error steady
state
(Ess)
Starter 30 0,078125 6,484375 0,234375 2,7777 0,0781
Starter 29 0,15625 6,171875 0,3125 4,4643 0,0488
Starter 28 0,078125 6,171875 0,46875 4,4643 0,0488
Starter 27 0,078125 4,609375 0,15625 1,3889 0,0833
Starter 26 0,078125 6,171875 0,46875 4,4643 0,0469
Grower 25 0,078125 4,1875 0,15625 1,4881 0,0232
Grower 24 0,046875 4,78125 0,0625 1,4368 0,0215
Finisher 23 0,04355 4,231 0.0567 1,4221 0,0212
Finisher 22 0,04265 4,1567 0.0555 1,4201 0,0211
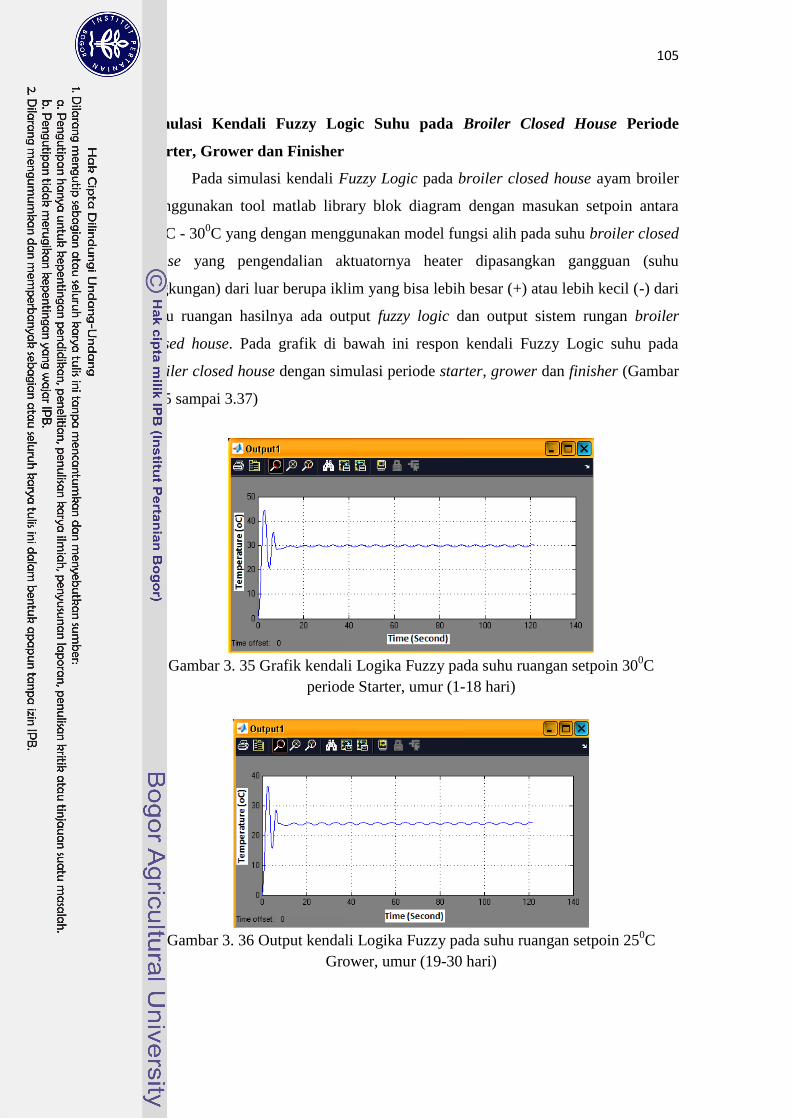
105
Simulasi Kendali Fuzzy Logic Suhu pada Broiler Closed House Periode
Starter, Grower dan Finisher
Pada simulasi kendali Fuzzy Logic pada broiler closed house ayam broiler
menggunakan tool matlab library blok diagram dengan masukan setpoin antara
240C - 30
0C yang dengan menggunakan model fungsi alih pada suhu broiler closed
house yang pengendalian aktuatornya heater dipasangkan gangguan (suhu
lingkungan) dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil (-) dari
suhu ruangan hasilnya ada output fuzzy logic dan output sistem rungan broiler
closed house. Pada grafik di bawah ini respon kendali Fuzzy Logic suhu pada
broiler closed house dengan simulasi periode starter, grower dan finisher (Gambar
3.35 sampai 3.37)
Gambar 3. 35 Grafik kendali Logika Fuzzy pada suhu ruangan setpoin 30
0C
periode Starter, umur (1-18 hari)
Gambar 3. 36 Output kendali Logika Fuzzy pada suhu ruangan setpoin 25
0C
Grower, umur (19-30 hari)

106
Gambar 3. 37 Grafik kendali Logika Fuzzy untuk suhu setpoin 23
0C periode
Finisher, umur (31-64 hari)
Pembahasan hasil grafik kendali fuzzy logik pada broiler closed house di
atas menunjukan respon transien dengan perlakuan pola tiga skenario starter (masa
pembibitan) umur (0-18hari) dengan setpoin antara 29-300C, grower (masa
pertumbuhan) umur (19-30 hari) dengan setpoint 26,27,280,C dan finisher (masa
panen) setpoint 30-38 0,
C adalah sebagai berikut:
Tabel 3.6 Respon kendali Logika Fuzzy suhu pada Broiler Closed House
Periode Setpoint
ppm
Waktu
Tunda
(Td)
Waktu
Penetap
(Ts)
Waktu
Naik
(Tr)
Persen
Lonjakan
(Os)
Error steady
state
(Ess)
Starter 30 1.2169 30.1551 1.2951 48.120% 0.171%
Starter 29 1.187 17.9698 1.2837 33.764% 0.753%
Starter 28 1.1762 14.4425 1.2312 49.219% 0.460%
Starter 27 1.153 18.6913 4.996 42.917% 0.311%
Starter 26 1.1456 27.033 1.1939 44.854% 0.840%
Grower 25 1.101 36.1324 1.1682 46.066% 0.376%
Grower 24 1.1042 33.35 1.1455 49.583% 0.250%
Finisher 23 1.1451 32.45 1.1432 48.567 0.0765
Simulasi Kendali ANFIS Suhu pada Broiler Closed House periode Starter,
Grower dan Finisher
Pada simulasi kendali ANFIS pada broiler closed house ayam broiler
menggunakan tool matlab library blok diagram dengan masukan setpoin antara
240C - 30
0C yang dengan menggunakan model fungsi alih pada suhu broiler closed
house yang pengendalian aktuatornya heater dipasangkan gangguan (suhu
lingkungan) dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil (-) dari

107
suhu ruangan hasilnya ada output fuzzy logic dan output sistem rungan broiler
closed house. Data input sebanyak 101 sebagai masukan dan tindakan satu set
input-output. Data digunakan sebagai data pelatihan membangun pengontrol fuzzy.
Ini melibatkan dua fase: pembelajaran (learning) dan fase pegujian (testing).Dalam
belajar tahap training set diperoleh dengan menghasilkan masukan secara acak dan
mengamati output yang sesuai dihasilkan oleh plant. Terbukti dengan
menggunakan ANFIS lebih cepat sinyal respon transien dari Fuzzy Logic. Pada
grafik di bawah ini respon kendali ANFIS suhu pada broiler closed house dengan
simulasi periode starter, grower dan finisher gambar 3.38, 3.39 dan 3.40
Gambar 3. 38 Grafik kendali ANFIS untuk suhu setpoin 30
0C periode Starter,
umur (1-18 hari)
Gambar 3. 39 Grafik respon kendali ANFIS suhu setpoint 24
0C periode Grower,
umur (19-30 hari)
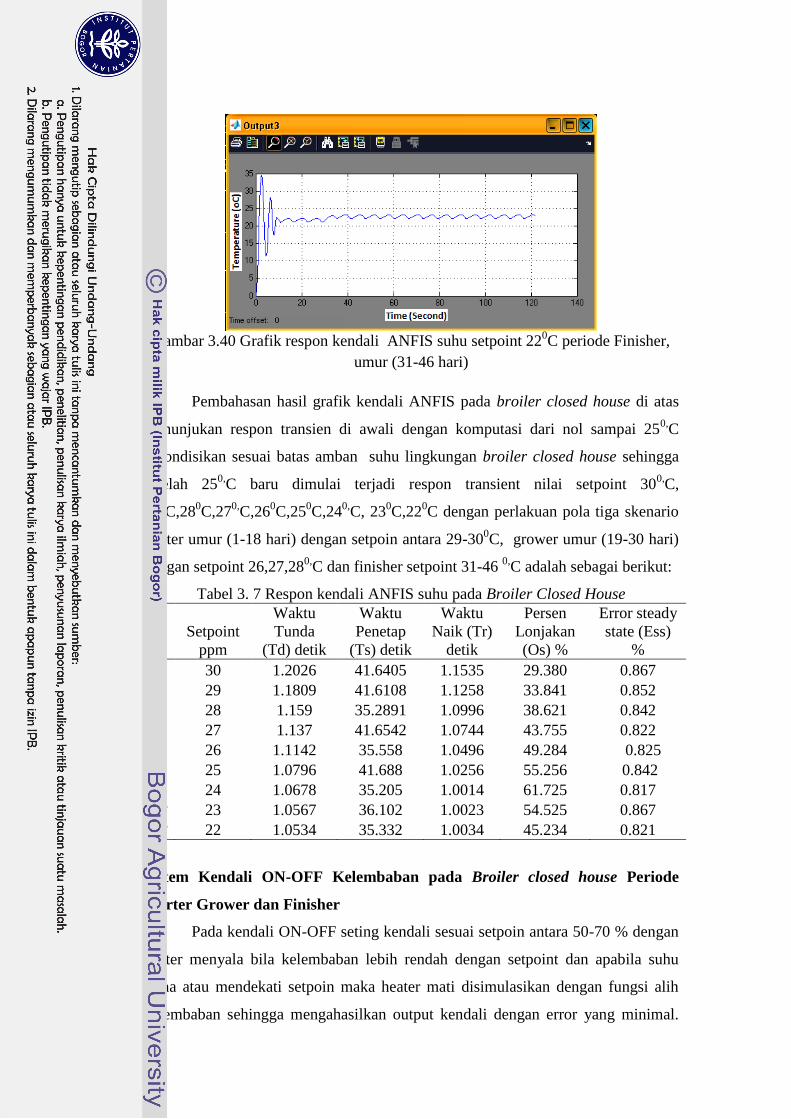
108
Gambar 3.40 Grafik respon kendali ANFIS suhu setpoint 22
0C periode Finisher,
umur (31-46 hari)
Pembahasan hasil grafik kendali ANFIS pada broiler closed house di atas
menunjukan respon transien di awali dengan komputasi dari nol sampai 250,
C
dikondisikan sesuai batas amban suhu lingkungan broiler closed house sehingga
setelah 250,
C baru dimulai terjadi respon transient nilai setpoint 300,C,
290C,28
0C,27
0,C,26
0C,25
0C,24
0,C, 23
0C,22
0C dengan perlakuan pola tiga skenario
starter umur (1-18 hari) dengan setpoin antara 29-300C, grower umur (19-30 hari)
dengan setpoint 26,27,280,
C dan finisher setpoint 31-46 0,
C adalah sebagai berikut:
Tabel 3. 7 Respon kendali ANFIS suhu pada Broiler Closed House
Periode
Setpoint
ppm
Waktu
Tunda
(Td) detik
Waktu
Penetap
(Ts) detik
Waktu
Naik (Tr)
detik
Persen
Lonjakan
(Os) %
Error steady
state (Ess)
%
Starter 30 1.2026 41.6405 1.1535 29.380 0.867
Starter 29 1.1809 41.6108 1.1258 33.841 0.852
Starter 28 1.159 35.2891 1.0996 38.621 0.842
Starter 27 1.137 41.6542 1.0744 43.755 0.822
Starter 26 1.1142 35.558 1.0496 49.284 0.825
Grower 25 1.0796 41.688 1.0256 55.256 0.842
Grower 24 1.0678 35.205 1.0014 61.725 0.817
Finisher 23 1.0567 36.102 1.0023 54.525 0.867
Finisher 22 1.0534 35.332 1.0034 45.234 0.821
Sistem Kendali ON-OFF Kelembaban pada Broiler closed house Periode
Starter Grower dan Finisher
Pada kendali ON-OFF seting kendali sesuai setpoin antara 50-70 % dengan
heater menyala bila kelembaban lebih rendah dengan setpoint dan apabila suhu
sama atau mendekati setpoin maka heater mati disimulasikan dengan fungsi alih
kelembaban sehingga mengahasilkan output kendali dengan error yang minimal.

109
Pada grafik respon kendali kelembaban ON-OFF periode starter, grower dan
finisher terdapat pada Gambar 3.41, 3.42 dan 3.43.
Gambar 3. 41 Grafik kendali ON OFF kelembaban setpoint 50 % periode Starter
umur (1-18 hari)
Gambar 3. 42 Grafik Kendali ON-OFF kelembaban setpoint 60 % periode Grower
umur (19-30 hari)
Gambar 3. 43 Grafik kendali ON-OFF kelembaban setpoint 70 % periode Finisher
umur (31-46 hari)
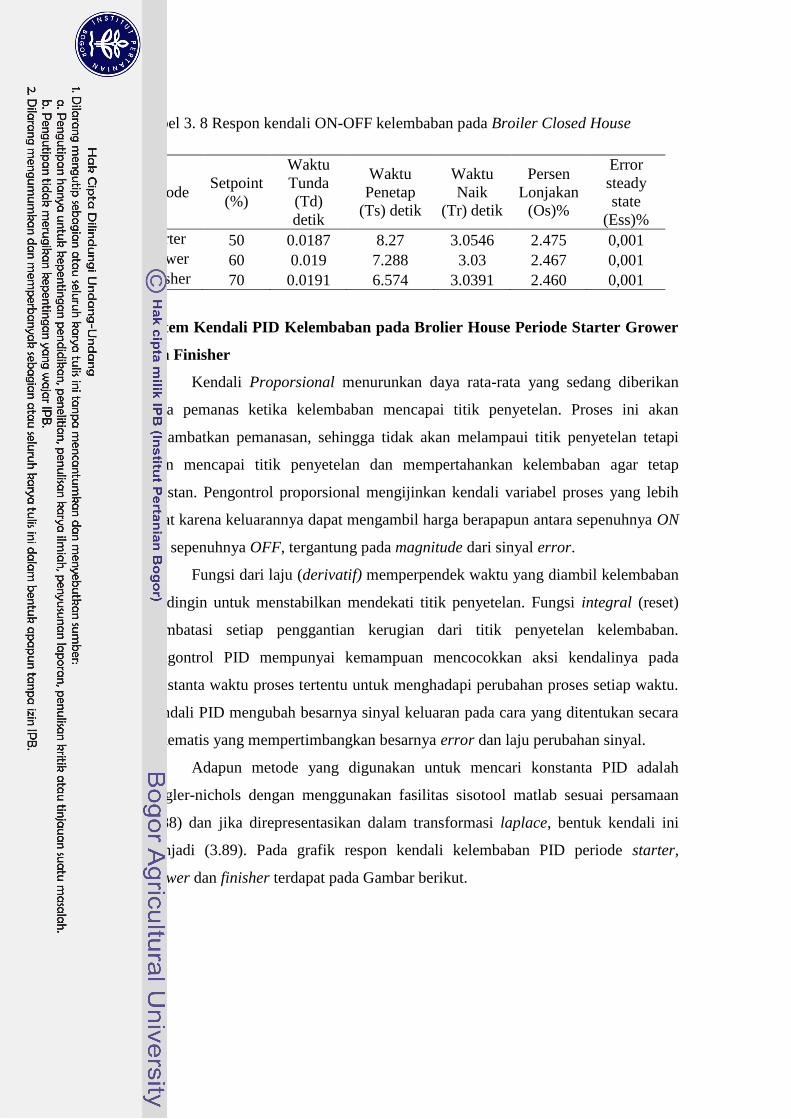
110
Tabel 3. 8 Respon kendali ON-OFF kelembaban pada Broiler Closed House
Sistem Kendali PID Kelembaban pada Brolier House Periode Starter Grower
dan Finisher
Kendali Proporsional menurunkan daya rata-rata yang sedang diberikan
pada pemanas ketika kelembaban mencapai titik penyetelan. Proses ini akan
melambatkan pemanasan, sehingga tidak akan melampaui titik penyetelan tetapi
akan mencapai titik penyetelan dan mempertahankan kelembaban agar tetap
konstan. Pengontrol proporsional mengijinkan kendali variabel proses yang lebih
ketat karena keluarannya dapat mengambil harga berapapun antara sepenuhnya ON
dan sepenuhnya OFF, tergantung pada magnitude dari sinyal error.
Fungsi dari laju (derivatif) memperpendek waktu yang diambil kelembaban
pendingin untuk menstabilkan mendekati titik penyetelan. Fungsi integral (reset)
membatasi setiap penggantian kerugian dari titik penyetelan kelembaban.
Pengontrol PID mempunyai kemampuan mencocokkan aksi kendalinya pada
konstanta waktu proses tertentu untuk menghadapi perubahan proses setiap waktu.
Kendali PID mengubah besarnya sinyal keluaran pada cara yang ditentukan secara
matematis yang mempertimbangkan besarnya error dan laju perubahan sinyal.
Adapun metode yang digunakan untuk mencari konstanta PID adalah
Ziegler-nichols dengan menggunakan fasilitas sisotool matlab sesuai persamaan
(3.88) dan jika direpresentasikan dalam transformasi laplace, bentuk kendali ini
menjadi (3.89). Pada grafik respon kendali kelembaban PID periode starter,
grower dan finisher terdapat pada Gambar berikut.
Periode Setpoint
(%)
Waktu
Tunda
(Td)
detik
Waktu
Penetap
(Ts) detik
Waktu
Naik
(Tr) detik
Persen
Lonjakan
(Os)%
Error
steady
state
(Ess)%
Starter 50 0.0187 8.27 3.0546 2.475 0,001
Grower 60 0.019 7.288 3.03 2.467 0,001
Finisher 70 0.0191 6.574 3.0391 2.460 0,001
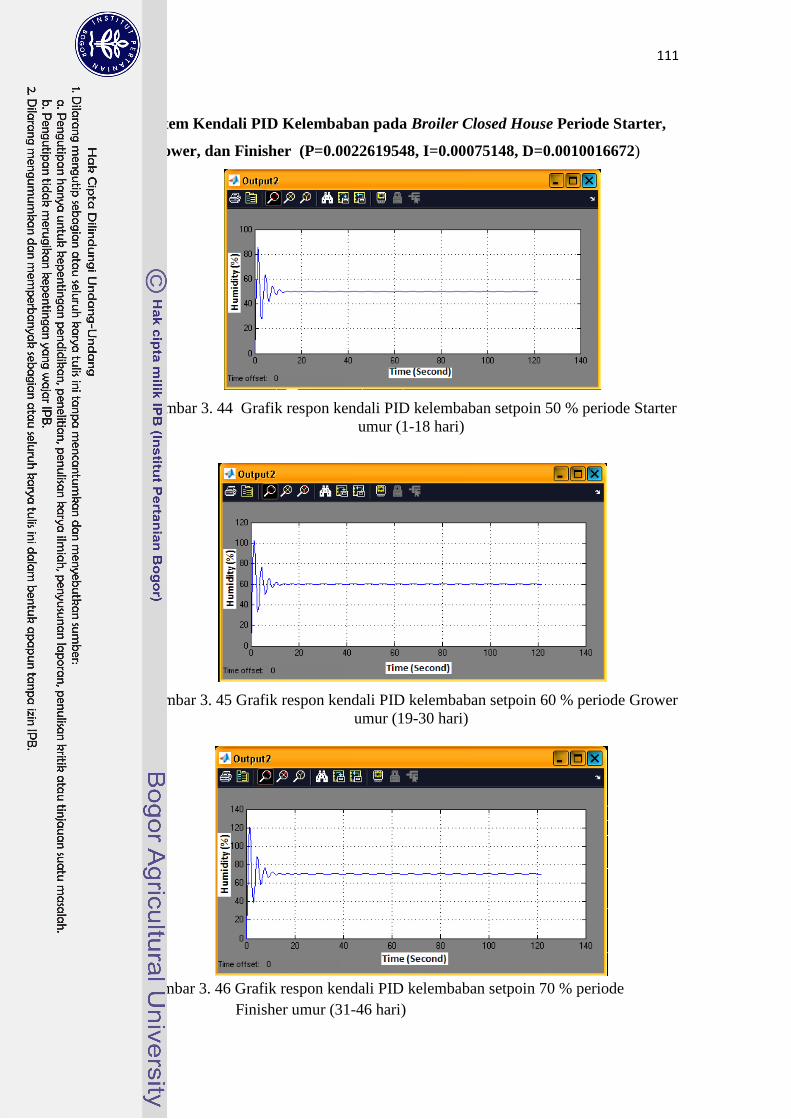
111
Sistem Kendali PID Kelembaban pada Broiler Closed House Periode Starter,
Grower, dan Finisher (P=0.0022619548, I=0.00075148, D=0.0010016672)
Gambar 3. 44 Grafik respon kendali PID kelembaban setpoin 50 % periode Starter
umur (1-18 hari)
Gambar 3. 45 Grafik respon kendali PID kelembaban setpoin 60 % periode Grower
umur (19-30 hari)
Gambar 3. 46 Grafik respon kendali PID kelembaban setpoin 70 % periode
Finisher umur (31-46 hari)
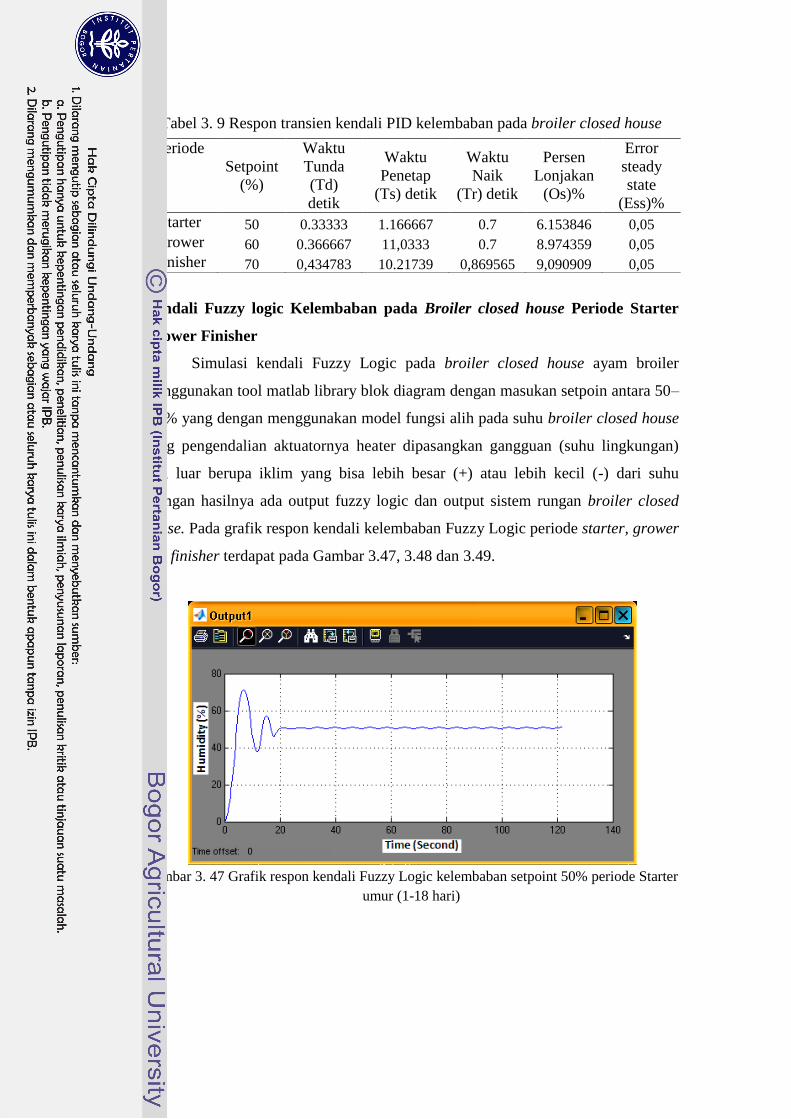
112
Tabel 3. 9 Respon transien kendali PID kelembaban pada broiler closed house
Kendali Fuzzy logic Kelembaban pada Broiler closed house Periode Starter
Grower Finisher
Simulasi kendali Fuzzy Logic pada broiler closed house ayam broiler
menggunakan tool matlab library blok diagram dengan masukan setpoin antara 50–
70 % yang dengan menggunakan model fungsi alih pada suhu broiler closed house
yang pengendalian aktuatornya heater dipasangkan gangguan (suhu lingkungan)
dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil (-) dari suhu
ruangan hasilnya ada output fuzzy logic dan output sistem rungan broiler closed
house. Pada grafik respon kendali kelembaban Fuzzy Logic periode starter, grower
dan finisher terdapat pada Gambar 3.47, 3.48 dan 3.49.
Gambar 3. 47 Grafik respon kendali Fuzzy Logic kelembaban setpoint 50% periode Starter
umur (1-18 hari)
Periode
Setpoint
(%)
Waktu
Tunda
(Td)
detik
Waktu
Penetap
(Ts) detik
Waktu
Naik
(Tr) detik
Persen
Lonjakan
(Os)%
Error
steady
state
(Ess)%
Starter 50 0.33333 1.166667 0.7 6.153846 0,05 Grower 60 0.366667 11,0333 0.7 8.974359 0,05 Finisher 70 0,434783 10.21739 0,869565 9,090909 0,05

113
Gambar 3. 48 Grafik respon kendali Fuzzy Logic kelembaban setpoint 60%
Grower umur (19-30 hari)
Gambar 3.49. Grafik Respon Kendali Fuzzy Logic Kelembaban Setpoint 70
Finisher Umur (31-46 Hari)
Tabel 3. 10 Respon transien kendali Fuzzy Logic pada kelembaban
Periode Setpoint
(%)
Waktu
Tunda (Td)
detik
Waktu
Penetap (Ts)
detik
Waktu
Naik (Tr)
detik
Persen
Lonjakan
(Os) %
Error
steady state
(Ess) %
Starter 50 2.9138 52.63 -31.291 31.389 0.930
Grower 60 3.2848 51.962 -31.7444 34.458 0.873
Finisher 70 3.7543 84.334 -32.1342 35.929 0.754
Simulasi Kendali ANFIS pada Broiler Closed House Periode Starter Grower
dan Finisher
Simulasi kendali ANFIS pada broiler closed house menggunakan tool
matlab library blok diagram dengan masukan setpoin antara 20% - 70% yang
dengan menggunakan model fungsi alih pada kelembaban broiler closed house
yang pengendalian aktuatornya cooling fad dipasangkan gangguan (kelembaban

114
lingkungan) dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil (-) dari
kelembaban ruangan hasilnya ada output fuzzy logic dan output sistem rungan
broiler closed house. Data input sebanyak 101 sebagai masukan dan tindakan satu
set input-output. Data digunakan sebagai data pelatihan membangun pengontrol
fuzzy. Ini melibatkan dua fase: pembelajaran (learning) dan fase pegujian (testing).
Dalam belajar tahap training set diperoleh dengan menghasilkan masukan secara
acak dan mengamati output yang sesuai dihasilkan oleh plant. Terbukti dengan
menggunakan ANFIS lebih cepat sinyal respon transien dari Fuzzy Logic. Pada
grafik respon kendali kelembaban ANFIS periode starter, grower dan finisher
terdapat pada Gambar 3.50, 3.51 dan 3.52.
Gambar 3. 50 Grafik respon kendali ANFIS kelembaban setpoint 50% periode
Starter umur (1-18 hari)
Gambar 3. 51 Grafik respon kendali ANFIS kelembaban setpoint 60% periode
Grower umur (19-30 hari)
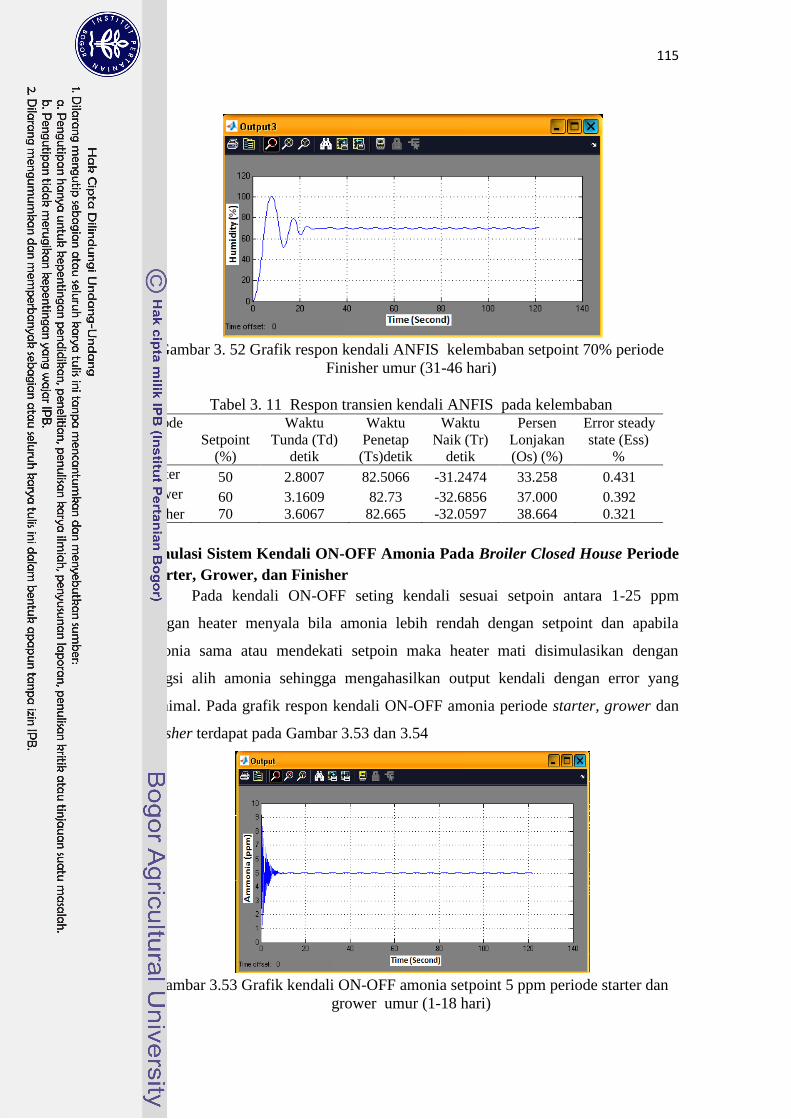
115
Gambar 3. 52 Grafik respon kendali ANFIS kelembaban setpoint 70% periode
Finisher umur (31-46 hari)
Tabel 3. 11 Respon transien kendali ANFIS pada kelembaban
Periode
Setpoint
(%)
Waktu
Tunda (Td)
detik
Waktu
Penetap
(Ts)detik
Waktu
Naik (Tr)
detik
Persen
Lonjakan
(Os) (%)
Error steady
state (Ess)
%
Starter 50 2.8007 82.5066 -31.2474 33.258 0.431
Grower 60 3.1609 82.73 -32.6856 37.000 0.392
Finisher 70 3.6067 82.665 -32.0597 38.664 0.321
Simulasi Sistem Kendali ON-OFF Amonia Pada Broiler Closed House Periode
Starter, Grower, dan Finisher
Pada kendali ON-OFF seting kendali sesuai setpoin antara 1-25 ppm
dengan heater menyala bila amonia lebih rendah dengan setpoint dan apabila
amonia sama atau mendekati setpoin maka heater mati disimulasikan dengan
fungsi alih amonia sehingga mengahasilkan output kendali dengan error yang
minimal. Pada grafik respon kendali ON-OFF amonia periode starter, grower dan
finisher terdapat pada Gambar 3.53 dan 3.54
Gambar 3.53 Grafik kendali ON-OFF amonia setpoint 5 ppm periode starter dan
grower umur (1-18 hari)
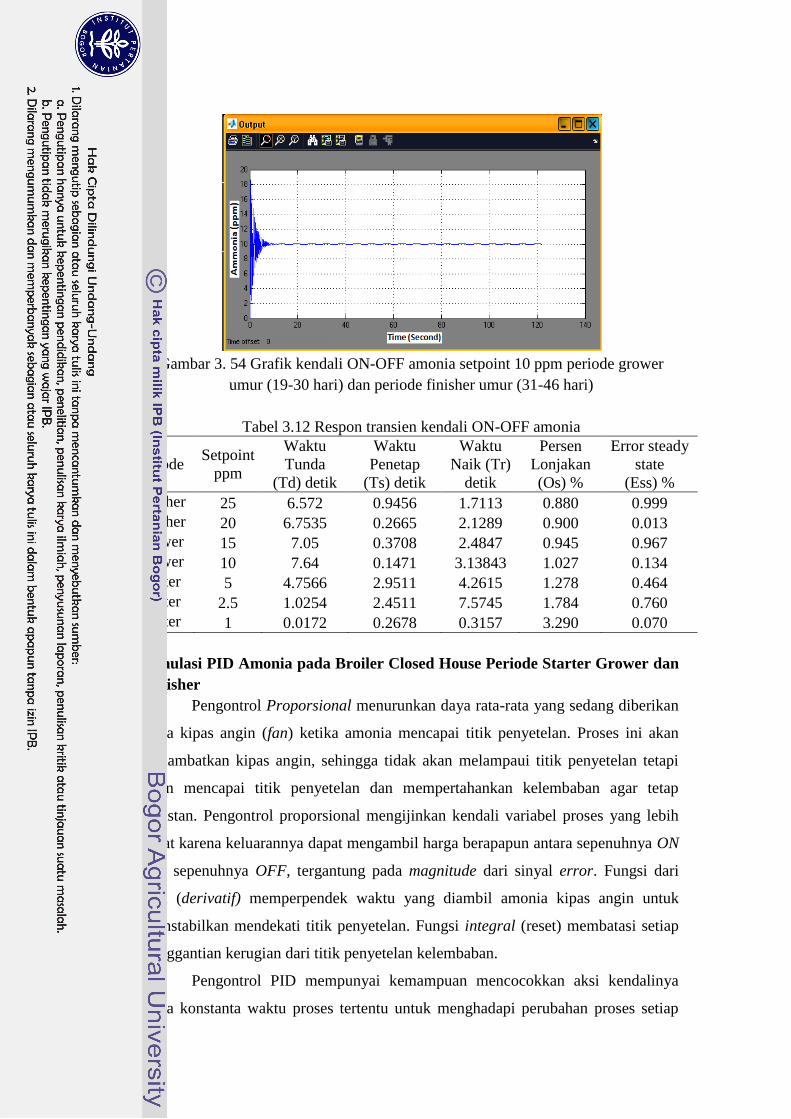
116
Gambar 3. 54 Grafik kendali ON-OFF amonia setpoint 10 ppm periode grower
umur (19-30 hari) dan periode finisher umur (31-46 hari)
Tabel 3.12 Respon transien kendali ON-OFF amonia
Periode Setpoint
ppm
Waktu
Tunda
(Td) detik
Waktu
Penetap
(Ts) detik
Waktu
Naik (Tr)
detik
Persen
Lonjakan
(Os) %
Error steady
state
(Ess) %
Finisher 25 6.572 0.9456 1.7113 0.880 0.999
Finisher 20 6.7535 0.2665 2.1289 0.900 0.013
Grower 15 7.05 0.3708 2.4847 0.945 0.967
Grower 10 7.64 0.1471 3.13843 1.027 0.134
Starter 5 4.7566 2.9511 4.2615 1.278 0.464
Starter 2.5 1.0254 2.4511 7.5745 1.784 0.760
Starter 1 0.0172 0.2678 0.3157 3.290 0.070
Simulasi PID Amonia pada Broiler Closed House Periode Starter Grower dan
Finisher
Pengontrol Proporsional menurunkan daya rata-rata yang sedang diberikan
pada kipas angin (fan) ketika amonia mencapai titik penyetelan. Proses ini akan
melambatkan kipas angin, sehingga tidak akan melampaui titik penyetelan tetapi
akan mencapai titik penyetelan dan mempertahankan kelembaban agar tetap
konstan. Pengontrol proporsional mengijinkan kendali variabel proses yang lebih
ketat karena keluarannya dapat mengambil harga berapapun antara sepenuhnya ON
dan sepenuhnya OFF, tergantung pada magnitude dari sinyal error. Fungsi dari
laju (derivatif) memperpendek waktu yang diambil amonia kipas angin untuk
menstabilkan mendekati titik penyetelan. Fungsi integral (reset) membatasi setiap
penggantian kerugian dari titik penyetelan kelembaban.
Pengontrol PID mempunyai kemampuan mencocokkan aksi kendalinya
pada konstanta waktu proses tertentu untuk menghadapi perubahan proses setiap

117
waktu. Kendali PID mengubah besarnya sinyal keluaran pada cara yang ditentukan
secara matematis yang mempertimbangkan besarnya error dan laju perubahan
sinyal.
Adapun metode yang digunakan untuk mencari konstanta PID adalah
Ziegler-nichols dengan menggunakan fasilitas sisotool matlab pada persamaan
(107) dan jika direpresentasikan dalam transformasi laplace, bentuk kendali ini
menjadi persamaan (108). Grafik respon kendali amonia periode starter, grower
dan finisher terdapat pada Gambar 3.55 dan 3.56
Gambar 3. 55 Grafik kendali PID amonia setpoint 5 ppm periode Starter umur (1-
18 hari)
Gambar 3. 40 Respon kendali PID amonia setpoint 10 ppm periode Grower umur
(19-30 hari) dan Finisher umur (31- 46 hari)
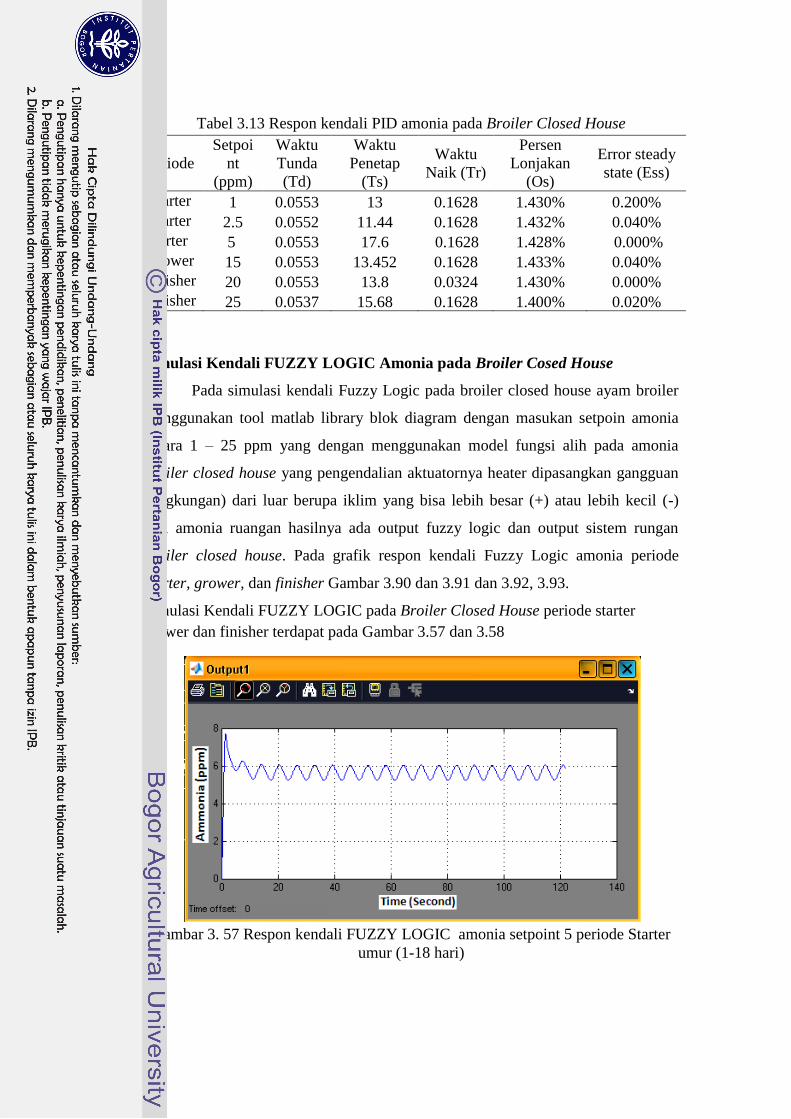
118
Tabel 3.13 Respon kendali PID amonia pada Broiler Closed House
Periode
Setpoi
nt
(ppm)
Waktu
Tunda
(Td)
Waktu
Penetap
(Ts)
Waktu
Naik (Tr)
Persen
Lonjakan
(Os)
Error steady
state (Ess)
Starter 1 0.0553 13 0.1628 1.430% 0.200%
Starter 2.5 0.0552 11.44 0.1628 1.432% 0.040%
Starter 5 0.0553 17.6 0.1628 1.428% 0.000%
Grower 15 0.0553 13.452 0.1628 1.433% 0.040%
Finisher 20 0.0553 13.8 0.0324 1.430% 0.000%
Finisher 25 0.0537 15.68 0.1628 1.400% 0.020%
Simulasi Kendali FUZZY LOGIC Amonia pada Broiler Cosed House
Pada simulasi kendali Fuzzy Logic pada broiler closed house ayam broiler
menggunakan tool matlab library blok diagram dengan masukan setpoin amonia
antara 1 – 25 ppm yang dengan menggunakan model fungsi alih pada amonia
broiler closed house yang pengendalian aktuatornya heater dipasangkan gangguan
(lingkungan) dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil (-)
dari amonia ruangan hasilnya ada output fuzzy logic dan output sistem rungan
broiler closed house. Pada grafik respon kendali Fuzzy Logic amonia periode
starter, grower, dan finisher Gambar 3.90 dan 3.91 dan 3.92, 3.93.
Simulasi Kendali FUZZY LOGIC pada Broiler Closed House periode starter
grower dan finisher terdapat pada Gambar 3.57 dan 3.58
Gambar 3. 57 Respon kendali FUZZY LOGIC amonia setpoint 5 periode Starter
umur (1-18 hari)

119
Gambar 3. 38 Respon kendali FUZZY LOGIC amonia setpoint 10 ppm periode
Grower umur (19-30 hari) dan Finisher umur (31- 46 hari)
Tabel 3.14 Respon kendali Fuzzy Logik amonia pada Broiler Closed House
Periode Setpoint
(ppm)
Waktu
Tunda (Td)
detik
Waktu
Penetap (Ts)
detik
Waktu
Naik (Tr)
detik
Persen
Lonjakan
(Os) %
Error steady
state
(Ess) %
Finisher 25 1.1081 55.248 1.2052 27.322 0.928
Finisher 20 0.9862 42.6834 0.9466 11.128 0.952
Grower 15 0.8501 23.8111 0.7815 29.188 0.930
Grower 10 0.6905 80.369 0.629 154.050 0.932
Starter 5 0.485 42.689 -0.036 59.352 0.986
Starter 2.5 0.3417 55.212 0.3335 166.680 0.992
Starter 1 0.214 55.229 0.851 474.420 0.940
Simulasi Kendali ANFIS Amonia pada Broiler Closed House Periode Starter,
Grower, dan Finisher
Simulasi kendali ANFIS pada broiler closed house ayam broiler
menggunakan tool matlab library blok diagram dengan masukan setpoin antara 1-
25 ppm yang dengan menggunakan model fungsi alih pada kelembaban broiler
closed house yang pengendalian aktuatornya kipas angin dipasangkan gangguan
(udara lingkungan) dari luar berupa iklim yang bisa lebih besar (+) atau lebih kecil
(-) dari kelembaban ruangan hasilnya ada output fuzzy logic dan output sistem
rungan broiler closed house. Data input sebanyak 101 sebagai masukan dan
tindakan satu set input-output. Data digunakan sebagai data pelatihan membangun
pengontrol fuzzy. Ini melibatkan dua fase: pembelajaran (learning) dan fase
pegujian (testing).Dalam belajar tahap training set diperoleh dengan menghasilkan
masukan secara acak dan mengamati output yang sesuai dihasilkan oleh plant.
Terbukti dengan menggunakan ANFIS lebih cepat sinyal respon transien dari

120
Fuzzy Logic. Pada grafik respon kendali ANFIS amonia periode starter, grower
dan finisher pada Gambar 3.59 dan 3.60.
Simulasi Kendali ANFIS pada Broiler Closed House Periode Starter, Grower,
dan Finisher
Gambar 3. 59 Grafik respon kendali ANFIS amonia setpoint 5ppm periode Starter
umur (1-18 hari)
Gambar 3. 60 Grafik respon kendali ANFIS amonia setpoint 10 ppm periode
grower umur (19-30 hari) dan finisher umur (31- 46 hari)
Tabel 3.15 Respon transien kendali ANFIS pada Broiler Closed House Starter Grower
dan Finisher
Peridoe Setpoint Waktu Tunda
(Td)
Waktu
Penetap
(Ts)
Waktu
Naik
(Tr)
Persen
Lonjakan
(Os)
Error
steady state
(Ess)
Starter 1 0.2773 47.9204 0.1878 2498.000% 0.290%
Starter 2.5 0.3278 47.929 0.2983 939.200% 0.056%
Starter 5 0.4665 41.302 0.4236 419.666% 2.886%
Grower 10 0.664 41.6886 0.6058 159.807% 1.816%
Grower 15 0.8174 22.832 0.753 73.222% 5.333%
Finisher 20 0.9482 41.774 0.9179 29.917% 4.000%
Finisher 25 1.055 47.9422 0.0665 30.480% 3.242%
121
Untuk mengatur pemanas (heater) dan kipas angin saluran keluar (outlet)
menggunakan metode pengontrol ON OFF, PID, Fuzzy Logik dan ANFIS untuk
menaikkan suhu pada ruangan broiler closed house sesuai yang diinginkan dengan
kelembaban turun. Masa Starter membutuhkan pemanas. Untuk memanaskan
ruangan membutuhkan daya heater 60 watt yang digunakan untuk menaikkan suhu
ruangan kandang ayam menjadi 2oC untuk mencapai suhu yang optimal 30
oC masa
starter dengan suhu awal 28 o
C dengan kelembaban awal 60 %. Dengan dibantu
aliran udara kipas saluran keluar (outlet) membuat udara panas merata di seluruh
ruangan dengan daya 1 kipas angin 1.800 watt dengan arus 2.8 ampere. Daya
pemanas (heater) antara 3000 -300000 watt bila dirata-ratakan 297.000 watt
diaktifkan pada masa starter. Pada masa grower dan finisher yang suhu yang
optimal pada kandang ayam dibawah 32 o
C dengan kelembaban awal 60 % maka
diaktifkan kipas angin sebanyak 3 dari 8 kipas angin secara bergantian sehingga
daya pemanas 5.400 watt.
Hasil penelitian adalah bagian dari supervisori kendali broiler closed house
secara terpisah yaitu performansi kendali (kriteria optimal) setiap kendali sebagai
bagian dari modus kendali, dengan parameter suhu, kelembaban dan amonia,
pengetahuan, broiler knowledge, climatc & environmental knowledge & control
knowledge dengan peralatan sensor heater,fan, humidifiyer dan evavorating
cooling.
Simpulan
Respon kendali ON-OFF, PID, Fuzzy Logic dan ANFIS menghasilkan
waktu naik, persen lonjakan, waktu penetap, error steady state, waktu tunda sesuai
parameter respon PID. Hasil pengujian baik pada model suhu dan kelembaban
yang dikehendaki dalam masa pemeliharaan di tiga skenario starter, grower dan
finisher dapat diperoleh dengan baik tanpa gangguan isolasi yang berarti. Daya
pemanas kandang ayam masa starter rata-rata 297.000 watt dan masa grower,
finisher membutuhkan 5.400 watt.
Saran
Dalam simulasi kendali ON-OFF, PID, Fuzzy Logic dan ANFIS
dikembangkan agar bisa pengendalian secara terpadu modus kendali, parameter
122
dan kriteria optimal dengan integrasi kendali yang terdiri dari : dua modus kendali,
tiga modus kendali, empat modus kendali untuk penelitian berikutnya.
Daftar Pustaka
Agustina L, Hatta M dan Purwanti S. 2010. Penggunaan Ramuan Herbal untuk
Meningkatkan Produktivitas dan Kualitas Broiler, Prosiding Seminar
Nasional Teknologi Peternakan dan Veteriner, Puslitbang Peternakan,
Kementerian Pertanian, Jakarta
Alimuddin dan Kudang BS, Subrata IDM, Sumiati. 2010. Critical Information
Design for House Broilers Used by Artificial Neural Network Proceeding
Konferensi Internasional AFITA, 4-7 oktober 2010, Bogor.
Alimuddin Seminar KB, Subrata IDM, Nakao Nomura, Sumiati. 2011. A
Supervisory Control system for Temperature and Humidity in a Closed
House Model for Broilers, International Journal of Electrical and Computer
Sciences IJECS-IJENS Vol:11 No.06 ISSN: 2077-1231.
Alimuddin, Seminar KB, Subrata IDM, Nomura N, Sumiati. 2012. ANFIS Control
Of Environmental Parameter Temperature On Closed House System Model
For Broilers, akan terbit Jjurnal TELKOMNIKA Indonesia Journal
Electrical and Computer Engineering, Vol. 1 no 10.Maret 2012, ISSN:
1693-6930 accredited by DGHE (DIKTI), Decree No:
51/Dikti/Kep/2010,Yogyakarta, Indonesia
Amon M. 1997. A Farm Scale Study on the Use of Clinoptilolite Zeolite and De
Odorase for reducing oudour and ammonia emissions from Broiler
HouseBroiler closed houses, Bioresource Technology, UK, page 229-237.
Amrullah IK. 2003. Nutrisi Ayam Broiler. Ed Ke-1. Bogor: Lembaga Satu Gunung
Budi.
Bolton W.1995. Mechatronics Electronic Control Systems in Mechanical
Engineering,Longman, England
Bolton W. 2006. Sistem Instrumentasi dan Sistem Kendali, Erlangga, Indonesia
Daskalov PI, Arvanitis KG , Pasgianos GD
, and Sigrimis NA, 2005, Non-linear
Adaptive Temperature and Humidity Control in Animal Buildings, Journal
Biosystems Engineering Volume 93, Issue 1, January 2006, Pages 1-24
Ditjen Peternakan Kementerian Pertanian, 2009,Jakarta
Djojodihardjo H. 1985. Dasar-dasar Termodinamika , Teknik Gramedia. Jakarta.
Ernst RA. 1998. Housing for Improved Performance in Hot Climates, Extension
Poultry Specialist, Departemen of Avia Sciences, University of California,
Davis, California.
[FAO] Food Agriculture Organisation. 2008,
Gopal M. 2003. Control System Principles and Design, Second Edition. McGraw-
Hill, Singapore
Lin F and Wonham WM.1988. Decentralized supervisory control of discrete-event
systems, Information Sciences, 44(3), pp. 199-224.
Hamidi B. 2006. Broiler yang Terpuaskan, Riset dan Pengembangan Feed
Technology, PT. CPJF Jakarta, Buletin CP. April 2006 No 76/Tahun VII.
Handoko. 1995. Dasar Klimatologi Dasar Edisi ke 2. Jakarta. PT Dunia Pustaka
Jaya.
Holman PJ. 1997. Heat Transfer, Eight Edition,McGraw-hill,North American

123
Hubbar Paul. 2000. Hierarchical Supervisory Control System, A Thesis Submitted
to the Faculty of graduate studies and research in partial fulfilment of the
requirements for the degree of doctor philosophy, Department of Electrical
and Computer Engineering McGill University, Montreal, Canada
Hery. 2009. Pentingnya Aspirin dan Vitamin C . http://broilerkita.blogspot.com
Ibrahim AM. 2003. Environmental Control for Poultry Building in Riyadh Area of
Saudi Arabia, J. King Sand University, Vol.16, Agri Sci,(1), Riyadh,pp.87-
102.
Jang J. 2003.Neural and Neurofuzzy Control. Tech. report no 99-H 99 (nefcon),
Jennis BH. 1978. The Thermal Enviroment Condition and Control, Harper & Row,
Publish, New York.
Kuo B C. 1995. Teknik Kontrol Automatik, PT Prenhallindo, Jakarta
Kuo B C. 1989. Teknik Kendali Automatik, Prenhallindo, Jakarta. Mutai E.B.K, Otieno P.O, Gitau A.N, Mbuge D.O. and Mutuli D.A. 2011. Simulation of
the Microclimate in Poultry Structures in Kenya, Research Journal of Applied
Sciences, Engineering and Technology 3(7): 579-588, 2011, ISSN: 2040-7467 [NRC] National Research Council. 1994. Nutrient Requirement of Poultry.
Washington: National Academy Pr.
Ogata K. 2002. Modern Control Engineering, Fourth Editional,Perason Education
International, USA
Ogata K.1994.Teknik Kendali Automatik I . Penerbit Erlangga.Paulus AN. 2003.
Panduan praktis Teknik Antarmuka dan Pemograman Mikrokontroller
AT89C51, Elek Media Komputindo, Jakarta
[PCPI] P T C h a ro en Phokphand In d o n es i a . 1 9 94 . C ar a P eme l ih ar aa n
A ya m P ed ag i ng . Jakarta.
Priyatno MA. 2000. Mendirikan Usaha Pemotongan Ayam. Cetakan ke-3.
Penebar Swadaya. Jakarta.
Piliang WG, Djojosoebagio AS. 2006. Fisiologi Nutrisi. Volume ke-1. Bogor:
Pusat Antar Universitas Ilmu Hayati, Institut Pertanian Bogor.
Rao R and Nagalakshmi D. 2002. Feeding to Minimise Heat Stress. Poultry
International Vol 41:7. http://siauwlielie.tripod.com/art_009_07.htm [3
Maret 2009].
Roni F. 2000. Kunci Sukses Beternak Ayam Broiler di Daerah Tropis. Agromedia.
Jakarta
Rosulindo RR. 2001, Desain Sistem Kendali Suhu dengan Metode PID Tuning
Fuzzy pada Prototipe Proses Pembuatan Susu Asam Secara Curah, Tesis
Megister Program Studi Elektroteknik Bidang Khusus Kendali dan Sistem
Program Pasca Sarjana ITB, Bandung.
Ramadge PJ and Wonham WM.1987. Supervisory control of a class of discrete
event processes. SIAM Journal on Control and Optimization, 25(1): 206–
230, .
Rudie K and Wonham W.M.1992. Think globally, act locally: Decentralized
supervisory control.IEEE Transactions on Automatic Control, 37(11):
1692–1708,.
Reznik L.1997. Fuzzy controllers, Newnes, Oxford.
Sadjad SR.2004. Sistem Kendali Adaptif untuk Kendalian Tak Linier, Research
Grant TPSDP S-1 Electrical Engineering, Batch 2, Jurusan Teknik Elektro
UNHAS, Makassar.

124
Seminar KB, Suhardiyanto H, Hardjoamidjojo, S, Tamrin. 2006. A Supervisory
Control System for Greenhouse. Proceedings of Regional Computer
Postgraduate Conference (ReCSPC’06), Malaysia, pp.30-34.
Setiawan I. 2008. Kendali PID untuk Proses Industri, Elex Media Komputindo,
Yogyakarta
Siswono. 2005. Konsumsi Protein Hewani di Bawah Standar.
http://www.republika.co.id/. (02 November 2009).
Totok RB. 2007. Adaptif Neurofuzzy Inference System Untuk Pengukuran Ph Jurnal
Teknik Informatika Jurusan Teknik Informatika, Fakultas Teknologi
Industri – Universitas Kristen Petra
http://www.petra.ac.id/~puslit/journals/dir.php?DepartmentID=INF
Weaver J and William D. 2001. Fundamentals of Ventilation, in Commercial
Chicken Meat and Egg Production, United State of America, page 113-
128.
Woods RL and Lawrence KL. 1997. Modeling and Simulation of Dynamic
System,Prentice Hall, Upper River, New Jersy
Yan J, Ryan M, Power J.1994. Using Fuzzy Logic, Prentice Hall.
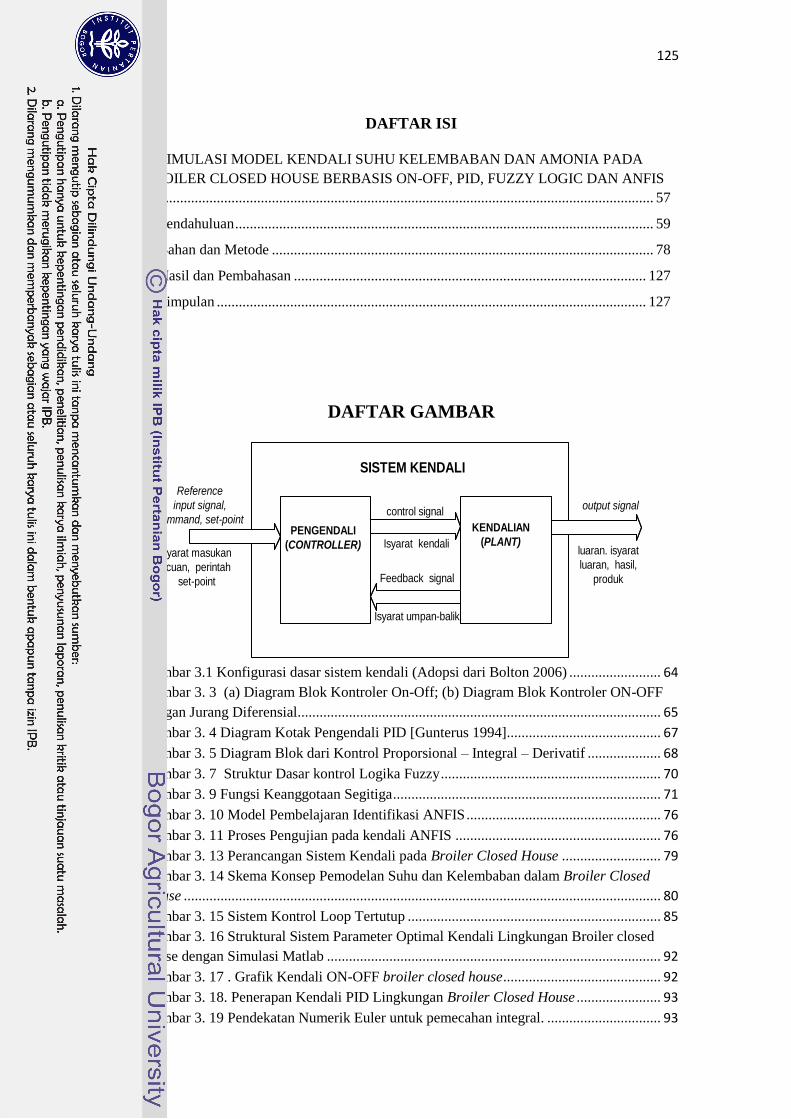
125
DAFTAR ISI
3 SIMULASI MODEL KENDALI SUHU KELEMBABAN DAN AMONIA PADA
BROILER CLOSED HOUSE BERBASIS ON-OFF, PID, FUZZY LOGIC DAN ANFIS
.......................................................................................................................................... 57
Pendahuluan .................................................................................................................. 59
Bahan dan Metode ........................................................................................................ 78
Hasil dan Pembahasan ................................................................................................ 127
Simpulan ..................................................................................................................... 127
DAFTAR GAMBAR
control signal
Isyarat kendali
Feedback signal
Isyarat umpan-balik
PENGENDALI
(CONTROLLER)
KENDALIAN
(PLANT)
SISTEM KENDALI
Reference
input signal,
command, set-point
Isyarat masukan
acuan, perintah
set-point
output signal
luaran. isyarat
luaran, hasil,
produk
Gambar 3.1 Konfigurasi dasar sistem kendali (Adopsi dari Bolton 2006) ......................... 64
Gambar 3. 3 (a) Diagram Blok Kontroler On-Off; (b) Diagram Blok Kontroler ON-OFF
dengan Jurang Diferensial ................................................................................................... 65
Gambar 3. 4 Diagram Kotak Pengendali PID [Gunterus 1994] .......................................... 67
Gambar 3. 5 Diagram Blok dari Kontrol Proporsional – Integral – Derivatif .................... 68
Gambar 3. 7 Struktur Dasar kontrol Logika Fuzzy ............................................................ 70
Gambar 3. 9 Fungsi Keanggotaan Segitiga ......................................................................... 71
Gambar 3. 10 Model Pembelajaran Identifikasi ANFIS ..................................................... 76
Gambar 3. 11 Proses Pengujian pada kendali ANFIS ........................................................ 76
Gambar 3. 13 Perancangan Sistem Kendali pada Broiler Closed House ........................... 79
Gambar 3. 14 Skema Konsep Pemodelan Suhu dan Kelembaban dalam Broiler Closed
House .................................................................................................................................. 80
Gambar 3. 15 Sistem Kontrol Loop Tertutup ..................................................................... 85
Gambar 3. 16 Struktural Sistem Parameter Optimal Kendali Lingkungan Broiler closed
house dengan Simulasi Matlab ........................................................................................... 92
Gambar 3. 17 . Grafik Kendali ON-OFF broiler closed house ........................................... 92
Gambar 3. 18. Penerapan Kendali PID Lingkungan Broiler Closed House ....................... 93
Gambar 3. 19 Pendekatan Numerik Euler untuk pemecahan integral. ............................... 93
126
Gambar 3. 20 Pendekatan Numerik Euler untuk pemecahan diferensial ............................ 93
Gambar 3. 21 Penerapan Kendali Fuzzy Logic Lingkungan Broiler Closed House ........... 95
Gambar 3. 22 Penerapan Kendali ANFIS Lingkungan Broiler Closed House ................... 96
Gambar 3. 23. Struktur ANFIS ........................................................................................... 96
Gambar 3. 24 Respon Sistem Kendali ................................................................................ 98
Gambar 3. 25 Simulink tool matlab kendali ON-OFF ........................................................ 99
Gambar 3. 26 Simulink Tool Matlab Kendali PID ............................................................. 99
Gambar 3. 27 Simulink Tool Matlab Kendali Fuzzy Logic................................................ 99
Gambar 3. 28 Simulink Tool Matlab Kendali ANFIS ...................................................... 100
Gambar 3. 29 Grafik Respon Kendali ON-OFF Suhu Setpoint 30 Starter Umur (1-18 Hari)
.......................................................................................................................................... 101
Gambar 3.30 Grafik Respon Kendali ON-OFF Suhu Setpoint 25 Grower (19-30Hari) ... 101
Gambar 3. 31 Grafik Respon Kendali ON-OFF Suhu Setpoint 230C Finisher (31-46 hari)
.......................................................................................................................................... 102
Gambar 3. 32 Respon Kendali PID Suhu setpoin 300C starter umur (1-18 hari) ............. 103
Gambar 3. 33 Respon Kendali PID Suhu setpoin 240C grower umur (19-30 hari) .......... 104
Gambar 3. 34 Respon Kendali PID Suhu setpoin 220C finisher umur (31-46 hari) ......... 104
Gambar 3. 36 Output Kendali Fuzzy Logic Pada Suhu Ruangan Setpoin 250C Grower,
Umur (19-30 Hari) ............................................................................................................ 105
Gambar 3. 37 Grafik Kendali Fuzzy Logic Untuk Suhu Setpoin 230C Periode Finisher,
Umur (31-64 Hari) ............................................................................................................ 106
Gambar 3. 38 Grafik kendali ANFIS untuk suhu setpoin 300C periode Starter, umur (1-18
hari) ................................................................................................................................... 107
Gambar 3. 39 Grafik respon Kendali ANFIS Suhu setpoint 240C periode Grower, umur
(19-30 hari) ....................................................................................................................... 107
Gambar 3. 40 Grafik respon Kendali ANFIS Suhu setpoint 220C periode Finisher, umur
(31-46 hari) ....................................................................................................................... 108
Gambar 3. 41 Grafik kendali ON OFF kelembaban setpoint 50 % Periode Starter umur (1-
18 hari) .............................................................................................................................. 109
Gambar 3. 42 Grafik Kendali ON OFF Kelembaban Setpoint 60 % Periode Grower Umur
(19-30 Hari) ...................................................................................................................... 109
Gambar 3. 43 Grafik Kendali ON OFF Kelembaban Setpoint 70 % Periode Finisher Umur
(31-46 Hari) ...................................................................................................................... 109
Gambar 3. 44 Grafik Respon Kendali PID Kelembaban Setpoin 50 % Periode Starter
Umur (1-18 Hari) .............................................................................................................. 111
Gambar 3. 45 Grafik Respon Kendali PID Kelembaban setpoin 60 % Periode Grower
umur (19-30 hari) .............................................................................................................. 111
Gambar 3. 46 Grafik Respon Kendali PID Kelembaban setpoin 70 % Periode Finisher
umur (31-46 hari) .............................................................................................................. 111
Gambar 3. 47 Grafik Respon Kendali Fuzzy Logic Kelembaban Setpoint 50 Periode
Starter Umur (1-18 Hari) .................................................................................................. 112
Gambar 3. 50 Grafik Respon Kendali ANFIS Kelembaban Setpoint 50% Periode Starter
Umur (1-18 Hari) .............................................................................................................. 114
Gambar 3. 51 Respon Kendali ANFIS Kelembaban Setpoint 60% Periode Grower Umur
(19-30 Hari) ...................................................................................................................... 114

127
Gambar 3. 52 Respon Kendali ANFIS Kelembaban Set Point 70% Periode Finisher Umur
(31-46 Hari) ...................................................................................................................... 115
Gambar 3. 53 Grafik Kendali ON OFF Amonia Setpoint 5 Ppm Periode Starter Dan
Grower Umur (1-18 Hari) ................................................................................................ 115
Gambar 3. 54 Grafik Kendali ON OFF amonia setpoint 10 ppm periode grower umur (19-
30 hari) dan periode finisher umur (31-46 hari) ............................................................... 116
Gambar 3. 55 Grafik Kendali PID amonia setpoint 5 ppm periode starter umur (1-18 hari)
.......................................................................................................................................... 117
Gambar 3. 56 Simulasi Kendali PID Amonia Setpoint 10 ppm Periode grower umur (19-30
hari) dan finisher umur (31- 46 hari) ................................................................................ 117
Gambar 3. 57 Respon Kendali FUZZY LOGIC Amonia Setpoint 5 Periode Starter Umur
(1-18 Hari) ........................................................................................................................ 118
Gambar 3. 58 Respon Kendali FUZZY LOGIC Amonia Setpoint 10 Ppm Periode Grower
Umur (19-30 Hari) Dan Finisher Umur (31- 46 Hari) ...................................................... 119
Gambar 3. 59 Grafik Kendali ANFIS Amonia setpoint 5ppm periode starter umur (1-18
hari) ................................................................................................................................... 120
Gambar 3. 60 Respon Kendali ANFIS Amonia setpoint 10 ppm Periode grower umur (19-
30 hari) dan finisher umur (31- 46 hari) ........................................................................... 120
DAFTAR TABEL Tabel 3. 1 Batas Aman dan Kematian Akibat Gas yang Merugikan di Broiler Closed House
............................................................................................................................................ 60
Tabel 3. 2 Matriks Keputusan ............................................................................................. 72
Tabel 3. 4 Respon Kendali ON OFF pada broiler closed house untuk ayam broiler ........ 102
Tabel 3. 5 Respon Kendali PID Suhu pada Broiler closed house untuk Ayam Broiler .... 104
Tabel 3. 6 Respon kendali ANFIS suhu pada broiler closed house .................................. 108
Tabel 3. 7 Respon Kendali ON-OFF Kelembaban Pada Broiler Closed House ............... 110
Tabel 3. 8 Respon Transien Kendali PID Kelembaban Pada Broiler Closed House ........ 112
Tabel 3. 9 Respon Trasien Kendali Fuzzy Logic pada Kelembaban ............................... 113
Tabel 3. 10 Respon trasien kendali ANFIS pada kelembaban ......................................... 115
Tabel 3. 12 Respon transien kendali ANFIS pada broiler closed house starter grower dan
finisher .............................................................................................................................. 120





























