Embed Size (px)
Citation preview

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
A Hydraulic Wind Power Transfer System:Operation and Modeling
Afshin Izadian, Senior Member, IEEE, Sina Hamzehlouia, Majid Deldar, and Sohel Anwar
Abstract—Conventional wind power plants employ a variablespeed gearbox to run a generator housed on top of a tower. A newtopology can remove some of the weight from the tower andcentralize the wind power generation. This new topology uses ahydraulic wind power transfer system to connect several windturbines to the generation unit. This paper demonstrates a mathe-matical modeling of this wind power transfer technology and itsdynamic behavior. The flow response, angular velocity, and pres-sure of the system obtained from the mathematical model arecompared with test results to demonstrate the accuracy of themathematical model. Several speed-step responses of the systemobtained from the mathematical model demonstrate a close agree-ment with the results from the prototype of the hydraulic windpower transfer unit.
Index Terms—Hydraulic wind power transfer, mathematicalmodeling, wind turbine.
I. INTRODUCTION
U TILIZATION of renewable energies as an alternativefor fossil fuels is growing considerably due to the ex-
haustion of natural hydrocarbons and the related environmentalconcerns [1], [2].
Potential sources of renewable energy available around theworld, if harvested, can meet all power demands and eliminatethe negative effects of fossil fuels [3]. Recent advancements inwind turbinemanufacturing have reduced production costs of thewind energy harvesting units and have resulted in the expansionof the application of wind power plants by 30% [5], [6].Consequently, wind turbines can become one of themajor powersources contributing to the world’s energy demands [4]. How-ever, the harvesting technology has remained in its traditionaltopology. Typical horizontal axis wind turbines include a rotor toconvert the wind energy into the shaft momentum [7]. This rotoris connected to a drivetrain, a gearbox, and an electric generator,which are integrated in a nacelle located at the top of the tower.These components, specifically the variable speed gearbox, areexpensive, bulky, and require regular maintenance, which keepswind energy production expensive. In addition, since the gear-box and generator are located on the top of the tower, itsinstallation and maintenance are time consuming and expensive.
Moreover, although the typical expected lifetime of a utilitywind turbine is 20 years, the gearboxes require an overhaulwithin 5–7 years of operation, and their replacements could costapproximately 10% of the turbine cost [8].
Accumulation of the wind energy from several wind turbinesin one central unit at the ground level is an innovative solution toaddress the above deficiencies. In this novel system, each windtower harvests wind energy and converts it to a high-pressurefluid. The flows from several wind turbine towers are combinedand fed to the central unit. At this unit, the combined fluids aresplit between a main generator and an auxiliary generator. Thistechnology will eliminate the weight from the tower whichreduces the maintenance time and cost. Moreover, instead ofhaving one generator and one variable gearbox for each windtower, multiple wind turbines are integrated to ultimately reducethe capital costs.
A hydraulic transmission system (HTS) is identified as anexceptional means of power transmission in applications withvariable input or output velocities such as manufacturing, auto-mation, and heavy-duty vehicles [9]. It offers fast response time,maintains precise velocity under variable input and load condi-tions [10], and is capable of producing high forces at high speeds[11]. Moreover, HTS offers decoupled dynamics, allowing formultiple-input, single-output drivetrain energy transfer config-urations [12]. Earlier research has shown the possibility of usingthis type of power transfer technology in a wind power plant,even though it is not feasible in its electrical counterpart[20]–[22], [30].
Simulation tools have been developed for hydraulic circuits[14] and used for modeling and control of turbines [15] andhydraulic transmissions [16]. Closed-loop hydraulic transmis-sion lines have similarly been modeled by the use of governingequations [17], [18] and by modeling fluid compressibility [19].Mathematical models of HTS wind turbine power plants arerequired to understand the dynamic behavior of the system, toinvestigate the performance of the plant, and to improve theirdesign and controls. However, no validated mathematical modelis available for the hydraulic transmission of wind power.
This paper introduces a mathematical model of a hydraulicwind power transmission system and demonstrates the perfor-mance of its operation at different speed ratios. This model wasdeveloped based on the models and governing equations ofhydraulic circuit components that include wind-driven pumps,generator-coupled hydraulic motors, hydraulic safety compo-nents, and proportional flow control elements. The dynamicoperation and step response of the system were modeled andverified with the experimental results gained from a prototype ofthe wind power plant.
Manuscript received February 09, 2013; revised June 24, 2013 andAugust 22,2013; accepted November 05, 2013. This work was supported by Grants fromIUPUI RSFG Funds, IUPUI Solution Center, and IUPUI FORCES Funds. Thisresearchwas conducted at the Energy Systems and Power Electronics Laboratoryat the Purdue School of Engineering and Technology, IUPUI.
The authors are with the Purdue School of Engineering and Technology,Indiana University–Purdue University Indianapolis (IUPUI), Indianapolis, IN46202 USA (e-mail: [email protected]).
Color versions of one ormore of the figures in this paper are available online athttp://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TSTE.2013.2291835
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY 1
1949-3029 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
This paper is organized as follows. Section II explains theoverall hydraulic power transfer system and its system compo-nents. Section III presents the dynamic model of the HTS. Apressure loss calculation model is introduced in Section IV.Section V includes the mathematical model verification withcomputer simulations, the experimental data, and a discussion.
II. HYDRAULIC WIND POWER TRANSFER SYSTEM
The hydraulic wind power transfer system consists of a fixeddisplacement pump driven by the prime mover (wind turbine)and one or more fixed displacement hydraulic motors. Thehydraulic transmission uses a hydraulic pump to convert themechanical input energy into pressurized fluid. Hydraulic hosesand steel pipes are used to transfer the harvested energy to thehydraulic motors [16].
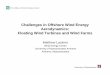
A schematic diagram of a wind energy HTS is illustrated inFig. 1. As the figure demonstrates, a fixed displacement pump ismechanically coupled with the wind turbine and supplies pres-surized hydraulic fluid to two fixed displacement hydraulicmotors. The hydraulic motors are coupled with electric genera-tors to produce electric power in a central power generation unit.Since the wind turbine generates a large amount of torque at arelatively low angular velocity, a high displacement hydraulicpump is required. The pump might also be equipped with a fixedinternal speed-up mechanism. Flexible high-pressure pipes/hoses connect the pump to the central generation unit.
The hydraulic circuit uses check valves to ensure the unidi-rectional flow. A pressure relief valve protects the systemcomponents from the destructive impact of localized high-pres-sure fluids. The hydraulic circuit contains a specific volume ofhydraulic fluid, which is distributed between the hydraulicmotors using a proportional valve. In Section III, the governingequations of the hydraulic circuit are obtained.
III. MATHEMATICAL MODEL
The dynamic model of the hydraulic system is obtained byusing governing equations of the hydraulic components in anintegrated configuration. The governing equations of hydraulicmotors and pumps to calculate flow and torque values [20], [25],[30] are utilized to express the closed-loop hydraulic systembehavior. Note that all parameters are measured in British
Engineering Units. If necessary, appropriate conversion factorswere applied when dealing with and as well as and
.
A. Fixed Displacement Pump
The flow that is delivered by the hydraulic pump is determinedby [29]
where is the pump flow delivery, is the pump angularvelocity, is the pump displacement, is the pump leakagecoefficient, and is the differential pressure across the pumpdefined as
where and are the gauge pressures at the pump terminals.The pump leakage coefficient is a numerical expression of the
leak probability and is expressed as follows:
where is the hydraulic fluid density and is the fluid kinematicviscosity. is the pump Hagen–Poiseuille coefficient and isdefined as [29]
where is the pump’s nominal angular velocity, is thenominal fluid kinematic viscosity, is the pump’s nominalpressure, and is the pump’s volumetric efficiency. Finally,torque at the pump-driving shaft is obtained by
where is the pump’s mechanical efficiency and is ex-pressed as
B. Fixed Displacement Motor Dynamics
The flow and torque equations are derived for the hydraulicmotor using the motor governing equations. The fluid leakagewithin its gears and casing reduces the shaft speed from idealspeed. Thus the hydraulic flow supplied to the hydraulic motorcan be obtained by [29]
where is the motor flow delivery, is the motor displace-ment, is the motor leakage coefficient, and is thedifferential pressure across the motor and is expressed as
where and are the gauge pressures at the motorterminals.
Fig. 1. Schematic of the high-pressure hydraulic power transfer system. Thehydraulic pump is at a distance from the central generation unit.
2 IEEE TRANSACTIONS ON SUSTAINABLE ENERGY

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
The motor leakage coefficient is a numerical expression of theleak probability and is expressed as follows:
where is the hydraulic fluid density and is the fluid kinematicviscosity. is themotorHagen–Poiseuille coefficient and isdefined as [29]
where is themotor’s nominal angular velocity, is thenominal fluid kinematic viscosity, is the motor nominalpressure, and is the motor’s volumetric efficiency. Finally,torque at the motor driving shaft is obtained by
where is the mechanical efficiency of the motor and isexpressed as
The total torque produced in the hydraulic motor is expressedas the sum of the torques from the motor loads and is given as
where is the total torque in the motor and , , andrepresent the inertial torque, damping friction torque, and loadtorque, respectively. This equation can be rearranged as
where is the motor inertia, is the motor angular velocity,and is the motor damping coefficient.
C. Hose Dynamics
The fluid compressibility model for a constant fluid bulkmodulus is expressed in [19]. The compressibility equationrepresents the dynamics of the hydraulic hose and the hydraulicfluid. Based on the principles of mass conservation and thedefinition of bulk modulus, the fluid compressibility within thesystem boundaries can be written as
where is the fluid volume subjected to pressure effect, is thefixed fluid bulk modulus, is the system pressure, and is theflow rate of fluid compressibility, which is expressed as
Hence, the pressure variation can be expressed as
D. Pressure Relief Valve Dynamics
Pressure relief valves are used for limiting the maximumpressure in hydraulic power transmission. A dynamic model fora pressure relief valve is presented in [26]. A simplified model to
determine the flow rate passing through the pressure relief valvein opening and closing states [19] is obtained by
>
where is the slope coefficient of valve static characteristics,is the system pressure, and is the valve opening pressure.
E. Check Valve Dynamics
The purpose of the check valve is to permit flow in onedirection and to prevent back flows. Unsatisfactory functionalityof check valves may result in high system vibrations and high-pressure peaks [27]. For a check valve with a spring preload [28],the flow rate passing through the check valve can be obtained by
>
where is the flow rate through the check valve, is the flowcoefficient, is the hydraulic perimeter of the valve disc, is thesystem pressure, is the valve opening pressure, is thearea in which fluid acts on the valve disc, and is the stiffness ofthe spring.
The overall hydraulic system can be connected as modules torepresent the dynamic behavior. Block diagrams of the windenergy transfer using MATLAB Simulink are demonstrated inFigs. 2 and 3. The model incorporates the mathematical govern-ing equations of individual hydraulic circuit components. Thebulk modulus unit generates the pressure of the system.
IV. PRESSURE LOSS CALCULATION
The energy in the hydraulic fluid is dissipated due to viscosityand friction. Viscosity, as a measure of the resistance of a fluid toflow, influences system losses as more viscous fluids requiremore energy toflow. In addition, energy losses occur in pipes as aresult of the pipe friction. The pressure loss and friction loss canbe obtained by continuity and energy equations (i.e., Bernoulli’sequation) for individual circuit components such as transmissionlines, pumps, and motors [29].
The Reynolds number determines different flow regime of afluid (laminar or turbulent). It can be used as a design principle
Fig. 2. Hydraulic wind energy harvesting model schematic diagram.
IZADIAN et al.: HYDRAULIC WIND POWER TRANSFER SYSTEM: OPERATION AND MODELING 3

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
for the system hose sizing. The Reynolds number of a fluid isobtained by
where is the density of the fluid, is the length of the pipe, isthe dynamic viscosity of the fluid, is the kinematic viscosity,and is the average fluid velocity and is expressed as
where is the flow in the pipe and is the inner area of thepipe. The energy equation is an extension of Bernoulli’s equationby considering the frictional losses and the existence of pumpsand motors in the system. The energy equation is expressedas [29]
where is the elevation head, is the fluid velocity, is thepressure, is the earth gravity, is the specific weight, is thepump head pressure, is the motor head pressure and iscalculated by the compressibility equation, and is the headloss.
The pipe head loss is calculated by Darcy’s equation, whichdetermines loss in pipes experiencing laminar flows by [29]
where is the inside pipe diameter, is the averagefluid velocityin the pipe, and is the friction factor and is defined for a pipeexperiencing laminar flow as
The energy equation is utilized along with Darcy’s equationand the compressibility equation to calculate the pressure loss atevery pipe segment (both horizontal and vertical) and the head ofeach pump in the system.
V. SYSTEM OPERATION
One benefit of the proposed hydraulic transfer system ishaving one central generation unit. The key point in this systemis the usage of a proportional valve to make this design apossibility. In a conventional wind power plant, individualgearboxes in each wind tower interface the low- and high-speedshafts of the turbine and the generator and provide an amplifiedlinear speed follower mechanism.
In the new design, hydraulic energy transfer in the form ofpressurizedfluid replaces the gearbox compartment, allowing forenergy collection from multiple turbines. This technique utilizeshydraulic pumps and hydraulic motors connected throughhigh-pressure pipes to transfer the energy from the wind turbineto a central ground level generator. Hydraulic valves are utilizedto control and regulate the hydraulic flows while propelling aloaded generator at the desired frequency.
Multiple-turbine configuration requires multiple hydraulicpumps driven by individual turbines. The energy from eachturbine in this system is transferred through pipes and is collectedin a fluid combiner unit at the central ground level powergeneration unit. In the central power generation unit, there aretwo sets of main and auxiliary generators. The total fluidgenerated from the multiple turbines is regulated and sent tothe main generators. Excess power is transferred to the auxiliarygenerator. Fig. 4 illustrates the system configuration of themultiple wind turbines, the energy collection, and the centralenergy generation unit.
In this configuration, the fluids of multiple mechanicallydecoupled wind turbines are combined. The speed of eachhydraulic pump determines the fluid generation from each windtower. The fluid combiner collects the fluid power and theproportional valve regulates the output fluid to the main genera-tor to deliver the power determined by the load. The auxiliarymotor transfers the excess power to the auxiliary generator.
VI. EXPERIMENTAL VERIFICATION AND DISCUSSION
In this section, the mathematical model behavior is comparedwith the experimental results obtained from a prototype. Theprototype parameters and system values are listed in Table I.Fig. 4 demonstrates an overlay of the experimental setup andhydraulic circuitry. A pulley-belt mechanism is used in decreas-ing the speed and increasing the dc motor torque needed to runthe pump. The system operating conditions, such as angularvelocity, flows, and pressures, were precisely measured by fastprototyping dSPACE 1104 hardware.
To demonstrate the accuracy of the mathematical model of thehydraulic wind energy transfer prototype, two distinct test con-figurations were considered as 1) forced flow distribution and2) natural flow distribution between the hydraulic motors. Theseconfigurations were used to analyze the dynamic system behav-ior and evaluate themathematical model performance. In the firstconfiguration, the valve was completely open to direct the flowtoward the auxiliary motor (Motor B). Hence, the primary motor(Motor A) was excluded from the hydraulic circuit. In the secondconfiguration, which is also known as the natural flow split, adirectional valve was used to distribute the flow generated by the
Fig. 3. Simulink model of hydraulic wind energy harvesting system.
4 IEEE TRANSACTIONS ON SUSTAINABLE ENERGY

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
dc pump between both hydraulic motors, based on the hydrauliccircuitry and geometric characteristics of the prototype.
A. Case I: Mathematical Model for Forced Flow Distribution
Fig. 5 shows the schematic diagram of the hydraulic circuitconfiguration for the forced flow distribution. A pulsewidthmodulation (PWM) signal of 100 Hz with 10% duty cycle wasused to control the proportional valve to direct the flow towardthe auxiliary motor. The speed step response of the system wasgenerated by applying a step voltage to the dcmotor to acceleratethe hydraulic pump from 0 to 300 rpm. After reaching a steadystate, a second step voltage was applied to speed up the systemfrom 300 to 400 rpm, followed by a step down back to 300 rpm toanalyze the undershoots.
Fig. 6 illustrates the angular velocity profile applied to both theprototype and the mathematical model. Fig. 7 shows the flows of
the hydraulic pump obtained from the mathematical model andmeasured from the prototype. This figure demonstrates the closetransient profile and steady-state values obtained from the modeland the experiment.
Fig. 8 illustrates the auxiliary motor flows obtained from themathematical model and the experimental setup. This figuredemonstrates a close agreement in the auxiliarymotor velocity asa result of step-up and step-down pump velocities and proves theaccuracy of the mathematical model. Fig. 9 shows the angularvelocity of the auxiliary motor obtained from the mathematicalmodel and the experimental setup. As the figure shows, the
Fig. 4. Schematic of a multi-turbine hydraulic wind power system.
TABLE ISIMULATION PARAMETERS
Fig. 6. Schematic diagram of the first experimental configuration.
Fig. 5. Experimental setup of the hydraulic wind power transfer system.
IZADIAN et al.: HYDRAULIC WIND POWER TRANSFER SYSTEM: OPERATION AND MODELING 5

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
velocities are close. The mechanical system imperfections anddependency on operating pressure resulted in a slight deviation atlower angular velocities. A slight difference between themeasured and calculated values was the result of geometricaldifferences in the prototype and the mathematical model. Theexperimental results demonstrate the accuracy and performanceof the mathematical model of the hydraulic wind energy transfersystem when the auxiliary motor is in the circuit.
B. Case II: Mathematical Model of Natural Flow Distribution
In the second configuration, the natural flow split, a directionalvalve distributed the flow generated by the dc pump (windturbine) between both hydraulic motors. The flow was naturallydistributed between the hydraulic motors through the hydrauliccircuitry considering the geometrical characteristics of the pro-totype, the displacement of the motors, and the position of theflow-control valves, such as check valves and the pressure relief
valves. Fig. 10 displays the schematic diagram of the secondhydraulic circuit configuration.
In this configuration, a step input voltage is applied to the dcmotor to simulate a speed-step input to the hydraulic pump from0 to 300 rpm.As the system reached the steady-state condition, inabout 10 s, another step function was applied to increase thespeed from 300 to 400 rpm. A speed step down was alsoscheduled from 400 to 300 rpm to investigate the accuracy ofthe mathematical model in determining undershoots. Fig. 11illustrates the supplied pump angular velocity profile, which isthe input to the system. This speed was applied to the mathe-matical model to investigate the modeling performance. Fig. 12illustrates both the pump flow measured from the prototype andthat of the mathematical model. This figure demonstrates theclose flow profiles generated from the mathematical model andthe experimental setup both in transient and steady-stateconditions.
Fig. 13 illustrates an accurate calculation of the primary motorflow from themathematicalmodel, whichwas in good agreementwith the prototype. Due to the asymmetries in the hydraulic
Fig. 7. Hydraulic pump angular velocity profile.
Fig. 8. Comparison between the hydraulic pump flow of themathematical modeland the experimental results.
Fig. 9. Comparison between the auxiliary hydraulic motor flow of the mathe-matical model and the experimental results.
Fig. 10. Comparison between the auxiliary hydraulic motor angular velocity ofthe mathematical model and the experimental results.
Fig. 11. Schematic diagram of the second experimental configuration.
Fig. 12. Hydraulic pump angular velocity profile.
6 IEEE TRANSACTIONS ON SUSTAINABLE ENERGY

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
circuit and the unmodeled dynamics of the transmission lines, theflow recorded from the auxiliarymotor showed a slight shift fromwhat themathematical model calculated, at 300 rpm. Some of thecontributing factors to this dissimilarity are, namely, the effect ofthe hydraulic circuit, the effect of directional valve dynamics,and the slight displacement and leakage factor variation in theexperimental setup. The flow profile of the auxiliary motor isshown in Fig. 14.
Figs. 15 and 16 illustrate the angular velocity profiles of theprimary and the auxiliarymotors obtained from themathematicalmodel and the experimental setup. As the figures demonstrate,the speed profiles of the mathematical model and the experi-mental setup are in close agreement both in transients and insteady-state values. A slight deviation was observed at thestarting point transients of the auxiliary motor, which was dueto the effects described for flow calculations (Fig. 17). The speedof the auxiliary motor was also influenced by motor inertia andthe damping factor.
In summary, the experimental results prove the accuracy andperformance of the mathematical model of this innovativehydraulic wind energy transfer system. The transient dynamicsof the system and steady-state values were in good agreementwith what was obtained from the prototype.
VII. POWER TRANSFER SCALING CHALLENGES
Scaling of the hydraulic wind power transfer system hascertain limitations and challenges associated with them. Someof these factors are identified as follows:
A. Power Transfer Distance
Distance between the towers on which the hydraulic pump islocated and the motor generator of the central unit is a limitingfactor. As the transmission line length is increased, the pressuredrop due to frictional losses will increase. Appropriate sizing ofthe transmission lines is critical to improving the overall effi-ciency of the power transfer system. Additionally, the number ofpumps integrated in the centralized generation unit needs to beoptimized based on the amount of frictional losses.
B. Hydraulic Motor/Pump Considerations
1) Power Rating: High power rating hydraulic pumps in therange of several kilowatts operate at low revolutions per minute.For instance, a 700-kW bent axis hydraulic pump operating atfull load rotates at 1200 rpm under a load torque of .The pump has a displacement of 60 ( ) which is notcapable of running under higher load torques. As the torquecapacity of pump is increased, a special radial piston pump isneeded, whose operating speed is much less than that of the bentaxis pump. For instance, the pump delivering loadcan reach top speed 300 rpm when generating 500 kW of power.
In other words, increasing torque and power simultaneously isnot possible for all ranges of the power delivery spectrum.Hence,selecting a hydraulic pump with desired speed and torque needscareful optimization.
2) Pump Displacement and Operating Pressure: Since thegenerator is synchronous, the delivered power by the hydraulicpump is a function of the load torque on the hydraulic pump shaft.The torque is the product of displacement and the operatingpressure. Therefore, for the power rating in the order ofmegawatts, either the required displacement would be very
Fig. 13. Comparison between the hydraulic pump flow of the mathematicalmodel and the experimental results.
Fig. 14. Comparison between the primary hydraulic motor flow of the mathe-matical model and the experimental results.
Fig. 15. Comparison between the auxiliary hydraulic motor flow of the mathe-matical model and the experimental results.
Fig. 16. Comparison between the primary hydraulic motor angular velocity ofthe mathematical model and the experimental results.
IZADIAN et al.: HYDRAULIC WIND POWER TRANSFER SYSTEM: OPERATION AND MODELING 7

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
large ( ) or the operating pressure would bearound 6000 psi. These requirements may impose certain designand manufacturing limitations.
VIII. CONCLUSION
This paper introduced a gearless wind power transfer systemas an alternative to traditional wind turbine drivetrains. Amathematical model of the hydraulically driven energy harvest-ing system was obtained. The dynamic behavior and the steady-state response of the mathematical model to a velocity step inputdemonstrated a close agreement with the results obtained fromthe experimental setup for both forced flow and natural flowconfigurations. The mathematical model could be used to scalethe system for an industrial-level wind power plant. Exclusivebenefits of implementing such a system based on the proposedmodel include 1) eliminating the variable speed gearbox using ahydraulic circuit; 2) having one central generator instead ofmultiple generators, which decreases the capital cost of the windpower plant; and 3) displacing most of the equipment from thenacelle to the ground to obtain better accessibility to the genera-tion unit and to reduce the maintenance costs and time.
REFERENCES
[1] T. Senjyu, R. Sakamoto, N. Urasaki, H. Higa, K. Uezato, and T. Funabashi,“Output power control of wind turbine generator by pitch angle controlusingminimumvariance control,”Elect. Eng. Jpn., vol. 154, no. 2, pp. 1–18,Jan. 2006.
[2] J. G. Slootweg, H. Polinder, andW. L.Kling, “Dynamicmodeling of awindturbine with doubly fed induction generator,” in Proc. IEEE Power Eng.Society Summer Meeting, Vancouver, Canada, 2001.
[3] J. G. Slootweg, S. W. H. de Haan, H. Polinder, and W. L. Klimg, “Generalmodel for representing variable speed wind turbine in power systemdynamics simulations,” IEEE Trans. Power Syst., vol. 18, no. 1,pp. 144–151, Feb. 2003.
[4] Y. Lei, A. Mullane, G. Lightbody, and R. Yacamini, “Modeling ofwind turbine with a doubly fed induction generator for grid integrationstudies,” IEEE Trans. Energy Convers., vol. 21, no. 1, pp. 257–264,Mar. 2006.
[5] U.S.Department of Energy, (2008,May).Wind energy by 2030–Increasingwind energy’s contribution to U.S. electricity supply. DOE/GO-2567.[Online]. Available: http://www1.eere.energy.gov/windandhydro/pdfs/41869.pdf.
[6] AmericanWindEnergyAssociation,Another Record Year forWindEnergyInstallations. [Online]. Available: http://www.awea.org/pubs/factsheets/Market_Update.pdf.
[7] S. Eriksson, H. Bernhoff, and M. Leijon, “Evaluation of different turbineconcepts for wind power,” Renew. Sustain. Energy Rev., vol. 12, no. 5,pp. 1419–1434, Jun. 2008.
[8] A. Ragheb and M. Ragheb, “Wind turbine gearbox technologies,” in Proc.1st Int. Nucl. Renew.EnergyConf. (INREC10),Amman, Jordan,Mar. 2010.
[9] K. Dasgupta, “Analysis of a hydrostatic transmission system using lowspeed high torque motor,” Mech. Mach. Theory, vol. 35, pp. 1481–1499,Oct. 2000.
[10] A. V. Akkaya, “Effect of bulk modulus on performance of a hydrostatictransmission control system,” Sadhana-Acad. Proc. Eng. Sci., vol. 31,pp. 543–556, Oct. 2006.
[11] G.A. Sohl and J. E. Bobrow, “Experiments and simulations on the nonlinearcontrol of a hydraulic servosystem,” IEEE Trans. Control Syst. Technol.,vol. 7, no. 2, pp. 238–247, Mar. 1999.
[12] S. Habibi and A. Goldenberg, “Design of a new high-performanceelectrohydraulic actuator,” IEEE/ASME Trans. Mechatron., vol. 5, no. 2,pp. 158–164, Jun. 2000.
[13] S. G. Kim, J. H. Kim, andW. S. Lee, “Hydraulic system design and vehicledynamic modeling for development of a tire roller,” Int. J. Contr. Autom.Syst., vol. 1, no. 4, pp. 89–94, Dec. 2003.
[14] Z. Jedrzykiewicz, J. Pluta, and J. Stojek, “Application of the MATLAB—Simulink package in the simulation tests on hydrostatic systems,” ActaMontan, vol. 1, pp. 29–36, 1998.
[15] B. Ji-Zhong, X. Ai-Guo, Y. Xin-Hua, and Z. Li-Kun, “Simulation model ofhydraulic turbine speed control system and its parameters identificationbased on resilient adaptive particle swarm optimization algorithm,” inProc.Power and Energy Eng. Conf. (APPEEC), Mar. 2010, pp. 1–4.
[16] K. Wu et al., “Modelling and identification of a hydrostatic transmissionhardware-in-the-loop simulator,” Int. J. Veh. Des., vol. 34, pp. 52–64, 2004.
[17] R. Zhang and A. Alleyne, “A model reference load controller with adapta-tion using a two stage pressure relief valve,” inPlastics, vol. 3, J. Peters, Ed.,2nd ed., New York, NY, USA: McGraw-Hill,1964, pp. 15–64.
[18] S. Habibi and A. Goldenberg, “Design of a new high performanceelectrohydraulic actuator,” inProc. 1999 IEEE/ASME Int. Conf. Adv. Intell.Mechatron., Atlanta, GA, USA, Sep. 19–23, 1999.
[19] A. V. Akkaya, “Effect of bulk modulus on performance of a hydrostatictransmission control system,” Sadhana, vol. 31, no. 5, pp. 543–556,Oct. 2006.
[20] S.Hamzehlouia, A. Izadian,A. Pusha, and S.Anwar, “Controls of hydraulicwind power transfer,” Proc. IECON, Melbourne, Australia, 2011.
[21] A. Pusha,A. Izadian, S.Hamzehlouia,N.Girrens, and S.Anwar, “Modelingof gearless wind power transfer,” in Proc. IECON, Melbourne, Australia,2011.
[22] A. Izadian, “Central Wind Turbine Power Generation,” U.S. PatentApplication US2013/0127166 A1, May 23, 2013.
[23] M. V. Gorbeshko, “Development of mathematical models for the hydraulicmachinery of systems controlling the moving components,” Hydrotech.Constr., vol. 3, no. 12, pp. 745–750, 1997.
[24] M. Deldar, A. Izadian, and S. Anwar, “Modeling of a hydraulic wind powerenergy transfer systemutilizing a proportional valve,” inProc. IEEEEnergyConvers. Congr. Expo. (ECCE 2013), Denver, Co, USA, Sep. 2013.
[25] Math Works Documentation Center, Hydraulic motor [Online]. Available:http://www.mathworks.com/help/toolbox/physmod/hydro/ref/hydraulic-motor.html, accessed 2013.
[26] G. Licsko, A. Champneys, and C. Hos, “Dynamical analysis of a hydraulicpressure relief valve,” inProc. World Congr. Eng. 2011, London, U.K., Jul.1–3, 2009, vol. 2.
[27] A. Pandula and G. Halasz, “Dynamic model for simulation of check valvesin pipe systems,” Period. Polytech. Mech. Eng. Ser., vol. 46/2,pp. 91–100, 2002.
[28] Y. Hou, L. Li, P. He, Y. Zhang, and L. Chen, “Shock absorber modelingand simulation based on modelica,” in Proc. 8th Int. Modelica Conf.,Dresden, Germany, Mar. 20–22, 2011, vol. 063, pp. 843–846.
[29] A. Esposito, Fluid Power with Application, 7th ed., Englewood Cliffs,NJ, USA: Prentice-Hall, 2009.
[30] S. Hamzehlouia and A. Izadian, “Modeling of hydraulic wind powertransfers,” in Proc. Power Energy Conf. (PECI), Champaign, IL,USA, 2012.
Afshin Izadian (SM’04–SM’10) received the M.S.degree in electrical engineering from Iran Universityof Science and Technology, Tehran, Iran, in 2002, andthe Ph.D. degree in electrical engineering from theWestVirginiaUniversity,Morgantown,WV,USA, in2008.He was a Postdoctoral Researcher at the University
of California, Los Angeles, CA, USA, in 2009.As an Assistant Professor, he joined the PurdueSchool of Engineering and Technology, IndianaUniversity–Purdue University Indianapolis (IUPUI),
Fig. 17. Comparison between the auxiliary hydraulic motor angular velocity ofthe mathematical model and the experimental results.
8 IEEE TRANSACTIONS ON SUSTAINABLE ENERGY

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
Indianapolis, IN, USA, in 2009. He is the Founder and Director of EnergySystems and Power Electronics Laboratory (ESPEL) at IUPUI. His researchinterests are application of controls in energy systems, energy conversion, powerelectronics, and electric power systems.Dr. Izadian is a lifetime member of Etta Kappa Nu (HKN) and Tau Beta Pai
(TBP).
Sina Hamzehlouia received the B.Sc. degree inmechanical engineering from Sharif University ofTechnology, Tehran, Iran, in 2008. Subsequently, hereceived the M.Sc. degree in automotive engineeringfrom Clemson University, Clemson, SC, USA, in2010. He has received another M.Sc. degree inmechanical engineering from Purdue School ofEngineering and Technology, Indianapolis, IN, USA,in 2012.
Majid Deldar was born in Esfahan, Iran, in 1979. Hereceived the M.S. degree in mechanical engineeringfrom Amir Kabir University of Technology, Tehran,Iran, in 2004. He is currently working toward thePh.D. degree at the Energy Systems and Power Elec-tronics Laboratory (ESPEL), Purdue School of Engi-neering and Technology, Indiana University–PurdueUniversity Indianapolis (IUPUI), Indianapolis, IN,USA.His research interests are wind turbine technologies
and hydrostatic transmission.
Sohel Anwar received the M.S. degree from FloridaState University, Tallahassee, FL, USA, in 1990, andthe Ph.D. degree from the University of Arizona,Tucson, AZ, USA, in 1994 both in mechanical engi-neering.He is currently an Associate Professor with the
Department of Mechanical Engineering, Indiana–University Purdue University Indianapolis (IUPUI),Indianapolis, IN, USA. He is also the Chair ofGraduate Education and Research Committee andDirector of Mechatronics Research Laboratory. His
research interests include wind turbine modeling and control, fault diagnosis oftraction batteries, sensor development, and automotive control systems.Mr. Anwar is a Member of the ASME. He is an Associate Editor of the IEEE
TRANSACTIONS ON VEHICULAR TECHNOLOGY.
IZADIAN et al.: HYDRAULIC WIND POWER TRANSFER SYSTEM: OPERATION AND MODELING 9