Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 3, NO. 5, OCTOBER 2009 277
Studies of MEMS Acoustic Sensors asImplantable Microphones for Totally
Implantable Hearing-Aid SystemsWen H. Ko, Life Fellow, IEEE, Rui Zhang, Ping Huang, Jun Guo, Xuesong Ye, Darrin J. Young, and
Cliff A. Megerian
Abstract—There is a need for high-quality implantable micro-phones for existing semiimplantable middle-ear hearing systemsand cochlear prosthesis to make them totally implantable, thusovercoming discomfort, inconvenience, and social stigma. Thispaper summarizes and compares the results of an in-vitro studyon three design approaches and the feasibility of using micro-electromechanical system acoustic sensors as implantable micro-phones to convert the umbo vibration directly into a high-qualitysound signal. The requirements of sensors were selected includingthe ability to withstand large body shocks or sudden changesof air pressure. Umbo vibration characteristics were extractedfrom literature and laboratory measurement data. A piezoelectricvibration source was built and calibrated to simulate the umbovibration. Two laboratory models of the acoustic sensor werestudied. The model-A device, using electrets-microphone as thesensor, was designed and tested in the laboratory and on temporalbones. The results verify that the laboratory measurement isconsistent with the temporal bone characterization and achieves anear flat frequency response with a minimum detectable signal ofa 65-dB sound-pressure-level (SPL) at 1 kHz. The model-B sensorwas then designed to increase the sensitivity and provide an easymounting on umbo. The model-B device can detect 40-dB SPLsound in the 1–2 kHz region, with 100-Hz channel bandwidth.The results of model-A and model-B displacement sensors andthe acceleration sensor are summarized and compared. A prelim-inary design of the implantable displacement sensor for totallyimplantable hearing-aid systems is also presented.
Index Terms—Displacement sensor, implantable microphone,implantable sensor, microelectromechanical-system (MEMS)acoustic sensors, totally implantable hearing systems, vibrationsensor.
I. INTRODUCTION
I T is estimated one out of ten Americans suffers from conduc-tive as well as sensorineural hearing loss [1]. Conventional
hearing aids can offer moderate rehabilitation, inherent limi-
Manuscript received September 29, 2008; revised February 10, 2009 and May19, 2009; accepted August 17, 2009. Current version published September 25,2009. This work was supported part by Grant 5R21-DC-006850 of the NationalInstitute of Health, USA. This paper was recommended by Associate EditorEugenio Culurciello.
W. H. Ko, R. Zhang, P. Huang, J. Guo, X. Ye, and D. J. Young are withthe Department of Electrical Engineering and Computer Science, Case Schoolof Engineering, Case Western Reserve University, Cleveland, OH 10900USA (e-mail: [email protected]; [email protected]; [email protected];[email protected]; [email protected]; [email protected]).
C. A. Megerian is with the Otolaryngology Department, Medical School,Case Western Reserve University, Cleveland, OH 10900 USA (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TBCAS.2009.2032267
tations, such as ear canal irritations, distortion, and occasionalringing, and social problems with being perceived as handi-capped, have deprived many patients of clear hearing. Partiallyimplantable cochlear and middle ear hearing-aid systems canenable those with severe hearing loss to gain improved hearingand speech function. However, the external microphone andelectronics create concerns about reliability, inconvenience, andsocial stigma. It is, therefore, highly desirable to develop totallyimplantable hearing-aid systems with implantable microphones[2], [3]. Several approaches of implantable microphones coupledto middle ear bones have been reported. Piezoelectric materialcan be used to sense the malleus vibration [4]. However, thematerial is stiff and difficult to maintain precise contact withumbo. An optic-fiber approach is complex; it consumes sizablepower and may temporarily lose signals [5]. These approachesall suffer from performance degradation when large shocks orsudden changes of air pressure occur. A magnetic sensor attachedon malleus head was tried with encouraging results [6]. However,the loading effect is large, and magnetic material is MRI incom-patible. The subcutaneous microphone is being evaluated [7],[8]; the noise from chewing and body movement as well as thetissue growth and sensitivity degradation with time are concerns.
Our research team has studied three microelectromechanical-system (MEMS) acoustic sensors based on accelerometer anddisplacement sensors [9]–[11]. The design and results of microaccelerometer approaches were reported [9]. The sensitivity atlow frequency, mass loading, weight, and the size are challenges.This paper presents: 1) introduction and implant microphone re-quirements; 2) laboratory simulation unit; 3) design and evalua-tion of Model-A displacement sensor; 4) design and evaluation ofModel-B displacement sensors; 5)comparison of three acousticsensors and future work; and 6) the conclusion.
The concept of using a displacement sensor with an inter-face circuit as an implantable microphone in totally implantablecochlear hearing-aid systems is shown in Fig. 1.
The displacement sensor is located inside the middle earcavity coupled to or mounted on the umbo. The sensor outputcan be used as a microphone output for various implantablehearing-aid systems, including the totally implantable cochlearprosthesis system or totally implantable middle ear hearingsystems, where the stimulator output may be applied to thestapes or the oval round window.
A. Requirements of the Implantable Acoustic Sensor
The requirements of the implantable acoustic sensor wereset to include 1) and 2), for conventional microphones, and 3),
1932-4545/$26.00 © 2009 IEEE

278 IEEE TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 3, NO. 5, OCTOBER 2009
Fig. 1. Totally implantable cochlear hearing-aid system block diagram and lo-cation of the implantable displacement sensor.
4), and 5) for implantable microphones coupled to middle earbones. They are:
1) nearly flat frequency response from 250 to 8 kHz;2) input sound range from 40 to 100 dB SPL;3) small size and low power consumption;4) less than 20 mg mass and force loadings on umbo to limit
the loading effect on the umbo vibration; [12];5) withstand large low-frequency displacements of umbo
while sudden air pressure changes or large body shocksoccur. Under these situations, the umbo displacementmay be up to 10–100 m, which is times that ofthe umbo amplitude responding to a small input soundstimulation. Therefore, especially designed sensor andcoupling techniques need to be developed to accommo-date this large input range.
From the requirement 3), the microelectromechanical-system(MEMS) capacitive sensors are selected. Both the accelerom-eter and displacement sensor approaches are pursued. The re-quirements 1)–5) represent significant new engineering chal-lenges that call for feasibility and prototype design studies be-fore device implementation.
II. LABORATORY SIMULATION UNIT OF UMBO VIBRATION
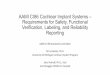
A laboratory simulation unit for umbo vibration charac-teristics measurement was assembled for the developmentof acoustic sensors as implantable microphones. The umbovibration characteristics with an input sound between 60 dB to100 dB SPL were measured and studied from temporal bonescharacterizations [9], [13]–[17]. The umbo displacement (vi-bration) amplitude at a given frequency is linearly related to theinput sound pressure level in dB SPL. The umbo displacementamplitudes versus frequency characteristics with 80-dB and100-dB SPL input sound levels are shown as solid curves inFig. 2.
A piezoelectric vibration source (PZT) [#P-810.10 fromPI Co.] driven by an oscillator with accurately controlledoutput frequency and voltage was assembled as the umbosimulation unit to emulate umbo vibrations under various
Fig. 2. Umbo displacement characteristics and driving voltage needed for thePZT simulator.
Fig. 3. Principle of model—A displacement sensor.
input sound levels. The simulation unit was calibrated witha Laser–Doppler-Vibrometer to exhibit adequate linearitybetween the driving voltage and vibration amplitude, flat fre-quency response, and large loading capability. The PZT drivingvoltages needed to simulate umbo vibrations at 80-dB and100-dB SPL input sound levels, as functions of frequency, aregiven in Fig. 2 as dotted lines, using the right-side axis scale.For inputs lower than 60-dB SPL the driving voltages are in themicrovolt range, making the measurement inaccurate.
Laboratory model-A displacement sensors were measuredwith the simulation unit. Characterization on several temporalbones was performed to verify that the measurement resultswith the simulation unit were consistent with the temporal boneresults, and the simulation unit can generate vibrations whichaccurately emulate umbo vibrations with specific input soundlevels. This unit is used to evaluate the design and problems ofacoustic sensors.
III. MODEL-A DISPLACEMENT SENSOR
This Model-A sensor is aimed to study the feasibility andto develop the coupler that can satisfy the requirements 4) and5). The principle of the Model-A displacement sensor with acoupling spring is shown in Fig. 3. The sensor is mounted onthe temporal bone structure near the umbo and coupled to umbothrough a spring. The sensor output is fed to an interface circuitto convert it into an electrical signal and further amplified as amicrophone output. The key component is the coupling spring.

KO et al.: STUDIES OF MEMS ACOUSTIC SENSORS 279
Fig. 4. Measurement setup for the spring transmission coefficient.
A. Coupling Spring
In order to satisfy the requirement 4) and 5), a speciallydesigned spring with proper weight and stiffness is used tocouple the sensor to umbo. The spring has to absorb largelow-frequency displacements, in the order of 100 m, withoutoverloading umbo, while transmitting the sound signal, withnanometer amplitude, to the sensor efficiently. When the springis compressed or extended up to 100 m, the loading to the umboshould be less than 20 mg which is equivalent to 196 N force.This would define a range of mass and stiffness of the spring. Atthe same time, the vibration signal that needs to be transmittedto the sensor with small attenuation; that is, the transmissioncoefficient, needs to be close to 100%. Thus, the specific densityand sound transmission velocity of the spring material need tobe considered. A 100- m diameter coil spring, made of tungstenwire, weighs 15 mg (the commercial sensor weighs about 5 mg)and has a self-resonant frequency of 249 Hz and a stiffness of10 N/m will be used for Model-A devices [10].
In order to design the spring properly, the vibration transmis-sion coefficient of the spring and the three modes of sound trans-mission were studied. The three modes are: 1) the acoustic cou-pling through the air; 2) the vibration movement of the spring;and 3) the sound-wave propagation through the spring wire.Fig. 4 shows the experimental setup.
The spring is connected between the PZT vibration sourceand a stretched aluminum foil modeling the sensor diaphragm.A Laser-Doppler–Vibrometer is used to measure the vibrationamplitude of the diaphragm over the frequency range. The threemodes of transmission were measured by different arrange-ments of the springs. Four springs were made from the samebatch of tungsten wire with the same coil diameter and lengthbut with different stiffness. Measured results at 800 Hz wererecorded. The transmission coefficient increased slowly from68% to 78% when spring stiffness increased from 5.1 N/mto 205 N/m. For the spring with 5.1-N/m stiffness, the totaltransmission coefficient at 800 Hz is 67%. The Model-A sensorused a spring with 10-N/m stiffness and 67% transmissioncoefficient. The transmission coefficient can be increased to75% if the end of the spring is enlarged to match the mechanicalimpedances of the spring and the diaphragm better [11], [17].This is less than 100% desired and other means of raising thetransmission coefficient would be studied.
Fig. 5. Model-A characteristics measured with the simulation unit.
B. Results Measured With the Simulation Unit
The Model-A sensor used a commercial electrets capacitivemicrophone with a built-in capacitance-to-voltage convertercircuit [WM-65A103,with 50-dB sensitivity and 55-dBsignal-to-noise ratio (SNR)] as the displacement sensor inFig. 3. The sensor was coupled through the spring to the PZTvibration source replacing the umbo in Fig. 3. The interfacecircuit is a low-noise amplifier which exhibits a gain of 1000,flat frequency response from 250 Hz to 8000 Hz, and an inputequivalent noise floor of 2.6 nV Hz. The frequency responseof each Model-A sensor was measured several times withthe input amplitudes in the range from 60 dB to 100 dB SPLat 1 kHz. The results were recorded with a dynamic signalanalyzer and an oscilloscope. The outputs at all frequencies arelinearly proportional to the input SPL level. Fig. 5 shows thetypical frequency characteristics and noise floor of the Mode-Asensor at 100-dB SPL input.
C. Results From Temporal Bone Experiments
The Model-A sensors were measured on temporal bones.Fig. 6(a) and (b) shows the setup. The calibrated 60-dB and95-dB SPL sound signals were applied to the ear canal throughthe ER-2 Instrument. The Model-A sensor was coupled to theumbo through the coupling spring. The amplifier output wasmeasured and recorded with a dynamic signal analyzer. Themeasured sensor characteristics and noise floor of the Model-Asensor are shown in Fig. 7. The minimum detectable SPL at1 kHz is 38 dB for 1-Hz channel bandwidth, and 58 dB forthe 100-Hz channel bandwidth. This is limited by the sensorsensitivity and the amplifier noise.
By comparing the results measured using the simulation unitand measured on temporal bones, it is verified that the sim-ulation unit can generate vibrations which accurately emulateumbo vibration with specific input sound levels [11].
Although, the Model-A sensor showed that it is feasible tosatisfy all of the requirements by using the designed couplingspring, the sensor unit needs to be mounted on a nearby bonystructure. The alignment of the spring to the umbo to haveproper initial spring compression, to maintain contact withumbo under all conditions, will be delicate. The engineering

280 IEEE TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 3, NO. 5, OCTOBER 2009
Fig. 6. Measurement setups for temporal bone experiments. (a) Block diagram.(b) Photograph of the experiment setup.
Fig. 7. Results of the Model-A sensor measured on temporal bones.
design of the mounting structure and the implant procedurewould be difficult. Other approaches to resolve these problemswere studied. The Model-B sensor was developed.
Fig. 8. Structure and principle of the Module-B sensor.
IV. MODEL-B DISPLACEMENT SENSOR
The Model-B sensor incorporates a novel approach to elimi-nate the coupling spring by mounting the sensor unit (sensor, in-terface I.C., and package) on the umbo; and an innovative designso that the microsensor responds differently to large low-fre-quency shocks than to small high-frequency sounds. The de-sign is based on the reasoning that large body shocks or largeair pressure changes, when transmitted to the ear, are large in-puts with much lower frequency than the voice or sound signals.The sensor unit has two parts: one responds to low-frequencyshocks, and the other responds to the sound frequency band. TheModel-B sensor can be mounted on umbo directly and can sat-isfy all requirements listed in Section I.
The high-performance silicon chip capacitive strain sensorswith 0.1 micro-strain sensitivity at 10-kHz bandwidth designedpreviously in our laboratory [19] were modified as a high sen-sitivity MEMS capacitive displacement sensor. The schematicstructure of the Model-B sensor is shown in Fig. 8. The capac-itive sensor diaphragm and the mounting stub have a mass .The diaphragm is connected to a set of springs S, with negli-gible mass and a total stiffness . The other end of the spring isconnected to a base with a mass , and . The sensorunit has a total mass of less than 20 mg. The ca-pacitance between the diaphragm and the base representsthe displacement sensor. For low-frequency (e.g., 200-Hz) vi-brations, the sensor mass and would move together withthe input displacement, resulting in a small sensor output. Forlarge amplitude low-frequency shocks, the whole sensor unit
would move together with the umbo. The sensor maybe saturated but not damaged. The total loading on the umbowould be limited to the 20-mg mass. When the input is in thesound frequency (500 Hz–8 kHz) range, the base would benearly standstill, and the diaphragm would respond to theinput, converting vibrations into capacitance changes. The in-terface amplifier circuit then converts the capacitance changesinto electrical signals, resulting in the acoustic sound voltageoutput.
A. Analysis of the Model-B Sensor Principle
As shown in Fig. 8, the Model-B sensor receives the drivingdisplacement from umbo through the mounting stub to the di-aphragm . The base is coupled to through a set ofsprings with a combined spring constant . The capacitanceC between the and base is the acoustic sensor. The initial

KO et al.: STUDIES OF MEMS ACOUSTIC SENSORS 281
positions , and included the effect of earth gravitationalforce are assumed to be constant.
When the input displacement is applied, assumethat the displacement of is ; the length change of the springis ; the total damping is ; and , , and are functions offrequency and time. The system response can be described bythe following force equations:
(1)
(2)
(3)
The solution of the Laplace Transform of (3) for is
(4)
The system characteristics are determined by two factors: 1) thecritical frequency and 2) system damping ratiowhere
(5)
For all hearing applications, the phase variation is not impor-tant. The Model-B sensor is a heavily damped device. The and
amplitudes responding to the input depend on the value ofand are plotted in Fig. 9(a). Considering the best damped re-
sponse, where is equal to , as approaches zero,approaches one, and approaches zero. The and
responses for (solid line) and(dotted line) cases, are indicated in Fig. 9(a). The capacitanceresponse to (and ) is shown in Fig. 9(b).
The sensor output is the capacitor variation. The capacitanceof a parallel plate capacitor, neglecting the fringe effect, is
(6)
where , , , and denote the capacitance, electrode area,dielectric constant, and separation between the electrodes, re-spectively. is the initial capacitance when . Theamplitude of capacitance change due to input and thechange of spring length is
(7)
where is the initial length of the spring. The length changeis a function of spring constant and . Assuming the umbohas large driving capability, the input displacement wouldbe equal to umbo vibration, and the sensor would truly be adisplacement sensor. The frequencycan be designed to be less than 200 Hz. As frequency increasesbeyond the sound frequency band, the force loading of “m” onumbo increases with . The increased loading effect woulddecrease the responses and at high frequencies. Beyonda frequency , the sensor sensitivity would drop off.
Fig. 9. Response of the sensor to input displacement. (a) “��� .” “��� ”responses to input A versus frequency F. (b) C response to input � versusfrequency F.
B. Model-B Displacement Sensor
The Model-B sensor module structure and the attachmentmethod to the umbo when implanted, as well as the sensor struc-ture, are schematically illustrated in Fig. 10.
The design of silicon chip Model-B sensor is outlined. TheModel-B displacement sensor has a desired mass of20 mg, and 200 Hz. According to (6), the springconstant should be 31.2 N/m. There are four folded-cantileverbeams supporting the diaphragm, acting as the springs in thesystem, the value of each beam should be 7.8 N/m. For a givenspring constant, the dimension of the cantilever-beams springscan be calculated from
(8)
where , , and are the thickness, length, and width of thespring; and E is the Young’s modulus. The calculated siliconcantilever beam dimension, with 200-Hz critical frequencyand 20- m thickness, should be 80 m in width and 1454 min length. However, due to compromises on silicon chip sizeand layout constraints from the shared fabrication processeson the silicon-on-insulator (SOI) wafer, the fabricated springsare shorter than that designed. The length of springs in theprototype sensor is 850 m. For a spring with 20 mg,
m, m, and m, the calculatedis 445 Hz. The prototype Model-B sensor weighs about 25 mgand the SOI wafer used also has 2- m silicon dioxide on the top

282 IEEE TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 3, NO. 5, OCTOBER 2009
Fig. 10. Model-B structure and attachment methode on umbo. (a) Overall ar-rangement. (b). Model-B sensor.
of the 20- m device layer. If the difference in Young’s modulusof silicon and silicon dioxide is neglected, the recalculatedis 459 Hz. The measured on the prototype Model-B sensoris about 480 Hz. This 4.4% increase in may contribute tothe normal dimensional variation in fabrication processes.
The Model-B sensor was fabricated on a 2 2-mm siliconchip. A printed-circuit board (PCB) substrate is used to simu-late the of the interface circuit; the total weight of the sensorunit is 25 mg. The sensors were measured by using the simu-lation unit and experimental setup described in Sections II andIII. The PZT vibration amplitude is set at a constant sound pres-sure level, corresponding to 97-dB SPL sound input at 1 kHz.The sensor capacitance output is fed through an interface cir-cuit to convert capacitance into voltage and then measured bya signal spectrum analyzer. The measurement setup is illus-trated in Fig. 11. The sensor is mounted on a printed-circuitboard (PCB) substrate and connected to the interface circuit alsomounted on the substrate. The connections were made through1-mil diameter flexible gold wires to minimize the strain inter-ference to the sensor diaphragm and the spring. The sensor unitis attached on the solid beam coupler by a thin layer of commer-cial hard adhesive.
C. Interface Circuit
The sensor output is the capacitance change . It needs aninterface circuit functioning as a capacitance to a voltage con-verter to convert into voltage and an amplifier. The output
Fig. 11. Test setup of the prototype Model-B sensor.
of the amplifier represents the output of an implantable micro-phone. The sensor unit is an integrated module; it includes thesensor, the mounting, and the interface circuit. The sensitivityof the sensor module is limited by the total noise of the module.The capacitive sensor itself has very low noise and does notconsume any real average power. In order to satisfy the systemsensitivity, a low-noise interface circuit is needed. The circuitnoise is usually specified by the input-referred noise power spec-tral density. For the low-noise interface circuit that is needed,the interface electronics designed for the high-performance ca-pacitive strain sensor by this group were used [19]. The inter-face circuit has a resolution, in capacitance change, of 250 aFover a bandwidth of dc to 10 kHz, and an input-referred voltagenoise power spectral density of 5 Hz. The architectureof the interface electronics is shown in Fig. 12. The prototypeModel-B sensor and a fixed capacitor are used as the differen-tial input capacitances in the “MEMS sensor” block, in Fig. 12.They are driven by a 1-MHz clock signal with 3-V amplitudeand are interfaced by a differential charge amplifier, which con-verts the sensor capacitance change to an output voltage. Thehigh clock frequency is chosen to modulate the sensor infor-mation away from the low-frequency noise, such as thenoise of the amplifier, a critical means to achieve high sensi-tivity. An input common-mode feedback (ICMFB) circuit andan output common-mode feedback (OCMFB) circuit are incor-porated with the charge amplifier to minimize its common-modeshift caused by the driving clock; hence, suppressing any offsetsignal due to the parasitic capacitance mismatch and drift overtime. The charge amplifier output is then mixed by the sameclock signal and low-pass filtered to obtain an output voltage
, which represents the desired sensor information. The in-terface circuit is fabricated by MOSIS using 1.5- m technology,and it consumes 1.5 mA at 3 V [20]. The power consumption canbe reduced by choosing smaller feature size MOSIS technologyin future designs.
D. Results of the Model-B Sensor
The Model-B sensor was tested with a simulation unit at theset amplitude equivalent to a sound input of 97-dB SPL at 1kHz. The measured voltage outputs as well as the system noiseas functions of frequency are shown in Fig. 13. This proto-type sensor has a critical frequency around 480 Hz, which ishigher than the desired value of 200 Hz for reasons, explained inSection IV-B. The displacement of the substrate of another

KO et al.: STUDIES OF MEMS ACOUSTIC SENSORS 283
Fig. 12. Capacitive sensor interface electronics architecture.
Fig. 13. Test result of the prototype sensor with 30-mg mass.
Fig. 14. Measured displacement x of the mass M.
sensor unit with the same mass under the same conditions wasmeasured and is shown in Fig. 14, where the response near thecritical frequency and the decrease in amplitude beyondare clearly illustrated as predicted.
In order to show that can be designed according to (6),the device mass of the same Model-B sensor was changed from25 mg to 125 mg by adding a weight on the substrate. The mea-sured results on the 125-mg sensor showed that the cutofffrequency was shifted from 480 Hz to less than 200 Hz. Both ofthese two Model-B sensors with different masses have a near flatfrequency response from 800 to 8 kHz with a variation of lessthan 6 dB. As shown in Fig. 14, for the Model-B sensor with30-mg mass, the signal-to-noise voltage ratio (signal analyzerbandwidth is 50 Hz) is 74 dB, at 1 kHz and 97-dB SPL input.This indicates that an SNR of 71 dB can be achieved if the in-terested signal bandwidth is 100 Hz. Therefore, a minimum de-tectable input sound level (with 6-dB SNR) of 32-dB SPL canbe achieved around 1 kHz with 100-Hz channel bandwidth.
V. THREE APPROACHES OF MEMS ACOUSTIC SENSORS AND
FUTURE WORK
As mentioned in the Introduction, our team had studied threeapproaches for the microacoustic sensor for implantable micro-phones aimed to meet the same requirements for implantablehearing systems. They are the accelerometer described in pre-vious works [9], [12], the spring coupled Model-A displacementsensor, and the direct mounting Model-B displacement sensordescribed in this paper. All three approaches can be designed tosatisfy the requirements set in Section I, and their power con-sumptions are about 4.5 mW. The power is nearly all consumedby the interface circuit; the capacitive sensors do not consumeany real average power except for the small series resistance ofthe capacitive sensor. With advanced IC processes, the powerconsumption can be reduced. Each of the three sensors and theirinterface circuits can be integrated on a millimeter-size siliconchip that weighs 1–2 mg. Both the accelerometer sensor and theModel-B sensor are to be attached on the umbo adhesives. Theminimum detectable sound pressure levels versus frequency ofthese three approaches are shown in Fig. 15, where all hearingsystems are assumed to have the channel bandwidth of 100 Hzand an SNR of 6 dB. The performance of all approaches can beimproved with next generation of designs. However, the shapesof these curves are the characteristics of each approach. Thelower sensitivity of the accelerometer approach in the low-fre-quency branch may be compensated by a special interface cir-cuit; the Model-A approach needs higher sensitivity and a deli-cate structure to attach the sensor unit to the bone. The Model-Bsensor has high sensitivity and near flat frequency response from800 Hz up to 10 kHz. Model-B is a promising approach for fur-ther investigation.

284 IEEE TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 3, NO. 5, OCTOBER 2009
Fig. 15. Minimum detectable signal levels of three acoustic sensors studied.
Fig. 16. Cross-sectional view of the preliminary design of the sensor.
In order to develop a practical implantable microphone forimplant evaluation, further studies are needed. They would in-clude: 1) package of the device to have long implant lifetime;2) the lead connection from the sensor/microphone to the mainbody of the implant system for power input and signal output;3) the proper adhesive materials, such as the bone cement [21];and d) the system reliability in the implanted environment. Withthe information gained from this study, the requirements of apractical device can be specified; serious effort may start to de-velop an implantable acoustic sensor unit for totally implantablemiddle ear or cochlear hearing systems. As an example, a pre-liminary design of the Model-B sensor is proposed based on theresults presented in this paper and is shown in Fig. 16. The basicprinciple is the separation of responses to low-frequency shockand to high-frequency sound signals. The additions are: 1) thesensor module is sealed in the silicon chamber by a top platethat also serves as the spring, 2) the sensor unit is covered witha biocompatible silicone coating, 3) the coupling stub used toattach the sensor to umbo is integrated with the sensor duringfabrication, and 4) stops are added to limit displacements of thecapacitive sensor in both directions.
VI. CONCLUSION
The feasibility of designing displacement sensors as im-plantable microphones to be used in totally implantable hearing
systems was studied and established. The capacitive accelerom-eter and displacement sensors approaches may all meet therequirements of implantable microphones and can be usedto convert the umbo vibration into electrical sound signalswith high fidelity when redesigned with improved technologyand the information gained from this study. The laboratorysimulation unit was assembled and confirmed that it can ac-curately emulate the umbo vibrations responding to soundinputs. The Model-A sensor was evaluated on the simulationunit and temporal bones. The results indicated that 20- to30-dB higher sensitivity or lower noise is needed to meet the40-dB operation requirements; and the accurate mounting ofthe sensor package in the middle ear cavity is difficult. TheModel-B sensor was designed to overcome these problems.A novel design was used to separate the large low-frequencymovements from the nanometer amplitude sound frequencyvibrations. The Model-B sensor can be mounted directly on
, and can respond differently to large shocks than regularsound signals. This Model-B sensor with a low noise interfacecircuit can detect 40-dB SPL sound in a 1- to 2-kHz regionwith 100-Hz channel bandwidth. A comparison of achievedperformance of three acoustic sensor approaches studied by theteam is summarized. A design example of the Model-B sensoras an implantable microphone is given for future studies.
REFERENCES
[1] Better Hearing Institute, Prevalence of hearing loss & demographics.[Online]. Available: http://www.betterhearing.org/research/fac-toids.cfm
[2] W. Ko, A. Maniglia, and R. Zhang, “A preliminary son the implantablemiddle ear hearing aid,” in Proc. IEEE 9th Annu. Conf. Eng. Med. Biol.,1987, p. 1890.
[3] A. Maniglia, W. Ko, and M. Rosenbaum, “A contactless electromag-netic implantable middle ear device of the ossicular stimulating type,”Ear Nose Throat J., vol. 73, no. 2, p. 78, 1994.
[4] H. Zenner, M. Maassen, R. Lehner, J. Baumann, and H. Leysieffer, “Animplantable hearing aid for inner ear hearing loss: Short-term implan-tation of microphone and transducer,” Otolaryng. Head Neck Surgery,vol. 45, no. 10, pp. 872–880, Oct. 1997.
[5] A. Vujanic, R. Pavelka, N. Adamovic, C. Kment, S. Mitic, W. Brenner,and G. Popovic, “Development of a totally implantable hearing aid,” inProc. 23rd Int. Conf. Microelectronics, Yugoslavia, May 2002, vol. 1,NIS.
[6] A. Maniglia, H. Abbass, T. Azar, M. Kane, P. Amantia, Garverick, W.Ko, W. Frenz, and T. Falk, “The middle ear bioelectronic microphonefor a totally implantable cochlear hearing device for profound and totalhearing loss,” Amer J. Otol., vol. 20, pp. 602–611, 1999.
[7] D. Chen, D. Backous, M. Arriaga, R. Garvin, D. Kobylek, T. Littman,S. Walgre, and L. David, “A totally implantable middle ear device forsensorineural hearing loss,” Otolaryng. Head Neck Surgery, vol. 131,no. 6, pp. 904–916, 2004.
[8] A. Jenkins, J. Atkins, H. Drew, M. Hoffer, B. Balough, J. Arigo, G.Alexiades, and W. Garvis, “U.S. Phase I preliminary results of use ofthe Otologics MET fully-implantable ossicular stimulator,” Otolaryng.Head Neck Surgery, vol. 137, pp. 206–212, 2007.
[9] D. Zurcher, J. Young, M. Semaan, C. Megerian, and W. Ko, “MEMSmiddle ear acoustic sensor for fully implantable cochlear prosthesis,”in Proc. 20th IEEE Int. Conf. MEMS, Japan, 2007, pp. 11–14.
[10] P. Huang, J. Guo, C. A. Megerian, D. Young, and W. Ko, “A laboratorystudy on a capacitive displacement sensor as an implant microphone intotally implant cochlear hearing aid systems,” in Proc. Int. Conf. IEEEEMBS, Lyon, France, Aug. 2007, pp. 5691–5694.
[11] W. Ko, P. Huang, J. Guo, R. Zhang, D. Young1, and C. Megerian,“MEMS acoustic sensors for totally implantable hearing aid systems,”in Proc. IEEE Int. Symp. Circuits and Systems, Seattle, WA, May 2008,pp. 1812–1817.
[12] S. Nishihara, H. Aritomo, and R. L. Goode, “Effects of changes in masson middle ear function,” Otolaryng. Head Neck Surgery, vol. 109, pp.899–910, 1993.

KO et al.: STUDIES OF MEMS ACOUSTIC SENSORS 285
[13] M. Zucher, “Development of a MEMS middle ear acoustic sensorfor a fully implantable cochlear prosthesis,” M.Sc. dissertation, CaseWestern Reserve Univ., Cleveland, OH, 2006.
[14] U. B. Willi, “The dynamic behavior of the incudo malleolar joint andits role during the transmission of sound,” Ph.D. dissertation, Dept.Radiol. Magn. Resonance, Univ. Zürich, Zurich, Switzerland, 2003.
[15] R. L. Goode, G. Ball, S. Nishihara, and K. Nakamura, “Laser DopplerVibrometer (LDV)—A new clinical tool for the otologist,” Amer. J.Otol., vol. 17, no. 6, pp. 813–822, Nov. 1996.
[16] R. Z. Gan, M. W. Wood, and K. J. Dormer, “Human middle ear transferfunction measured by double laser interferometry system,” Otol. Neu-rotol., vol. 25, no. 4, pp. 423–435, Jul. 2004.
[17] S. Nishihara, H. Aritomo, and R. L. Goode, “Effects of changes in masson middle ear function,” Otolaryng. Head-Neck Surgery, vol. 109, pp.899–910, 1993.
[18] P. Huang, “A laboratory study of a capacitive displacement sensor as animplant microphone,” M.Sc. dissertation, Case Western Reserve Univ.,Cleveland, OH, 2007.
[19] W. H. Ko, D. Young, and J. Guo et al., “A high-performance MEMScapacitive strain sensing system,” Sens. Actuators A: Phys., vol. 133-2,pp. 272–277, 2007.
[20] M. Suster, N. Chaimanonart, J. Guo, W. H. Ko, and D. Young, “Re-mote-powered high-performance strain sensing microsystem,” in Proc.IEEE Techn. Dig., Int. Conf. MEMS, Miami, FL, 2005, pp. 255–258.
[21] A. J. Maniglia, N. Nakabayashi, M. M. Paparella, and J. W. Werning,“A new adhesive bonding material for the cementation of implantabledevices,” Otol. Surgery. Amer. J. Otol, vol. 18, pp. 322–327, 1997.
Wen H. Ko (LF’90) received the B.S. degree in elec-trical engineering from Amoy (Xiamen) Universityof China, Xiamen, China, in l946, and the M.S. andPh.D. degrees in electrical engineering from CaseInstitute of Technology, Cleveland, OH, in l956 andl959, respectively.
He has been an Assistant, an Associate, and a FullProfessor of Electrical Engineering and BiomedicalEngineering at Case Western Reserve University(CWRU), Cleveland, in l959, l962, and l967, respec-tively. He became a Professor Emeritus in Electrical
Engineering at CWRU in 1993.Dr. Ko is a fellow of the American Institute of Medical and Biological Engi-
neering. He is active in research on microelectromechanical systems, biomed-ical implants, as well as micropackaging.
Rui Zhang received the B.Sc. degree in mechanicaland electrical engineering from Xiamen University ofChina, Xiamen, China, in 2003 and is currently pur-suing the Ph.D. degree in electrical engineering andcomputer science from Case Western Reserve Uni-versity, Cleveland, OH.
His current research includes the design and fab-rication of microelectromechanical-systems sensorsand actuators, and complementary metal–oxide semi-conductor interface circuit design.
Ping Huang received the M.S. degree in electrical engineering from CaseWestern Reserve University, Cleveland, OH, in 2007, in the field of microelec-tromechanical-systems (MEMS) technology and sensor design.
His interest is in MEMS devices and micromachining technology.
Jun Guo received the B.S. degree in electrical engineering from Tsinghua Uni-versity, Beijing, China, in 1993, and the M.S. degree in electrical engineeringand computer science from Case Western Reserve University, Cleveland, OH,in 2000, where he received the Ph.D. degree in 2007 .
His current research is oriented toward the design, fabrication, and testing ofmicroelectromechanical-system sensor and nanoelectromechanical devices fora variety of applications.
Xuesong Ye received the Ph.D. degree in biomedicalengineering from Zhejiang University, Hang Zhou,China, in 1997.
He was an Assistant Professor, Associate Pro-fessor, and Professor with the Department ofBiomedical Engineering at Zhejiang Universitysince 1997. From 2006 to 2008, he was a Senior Re-search Associate with the Department of ElectricalEngineering and Computer Science, Case WesternReserve University, Cleveland, OH. His research isfocused on neural-network computing, neural chip
fabrication, and neural signal detecting and processing for brain computerinterface based on microelectromechanical-system sensor and complementarymetal–oxide semiconductor integrated-circuit design.
Darrin J. Young received the B.S. degree (Hons.),M.S., and Ph.D. degrees in electrical engineering andcomputer science from the Department of ElectricalEngineering and Computer Sciences at the Univer-sity of California, Berkeley, in 1991, 1993, and 1999,respectively.
His doctoral dissertation focused on microelectromechanical devices design and fabricationtechnologies for radio-frequency analog signalprocessing. From 1991 to 1993, he was withHewlett-Packard Laboratories, Palo Alto, CA,
designing a shared memory system for a digital signal processor-basedmultiprocessor architecture. Between 1997 and 1998, he was with LawrenceLivermore National Laboratory, working on the design and fabrication of3-D radio-frequency microelectromechanical-systems (MEMS) inductors forwireless communications.
Dr. Young joined the Department of Electrical Engineering and ComputerScience, Case School of Engineering, Case Western Reserve University, Cleve-land, in 1999, where he is currently an Associate Professor. His research in-terests include MEMS and nanoelectromechanical devices design, fabrication,and integrated analog circuits design for sensing, communication, biomedicalimplant, and general industrial applications.
Cliff A. Megerian received the M.D. degree from theUniversity of Michigan Medical School, Ann Arbor,in 1988
He served his residency at Otolaryngology andHead and Neck at University Hospital, Cleveland,OH. He was the first Clinical Fellow in otologyand neurotology at the Massachusetts Eye and EarInfirmary and Harvard Medical School. Currently,he is a Professor and Vice Chairman of otolaryn-gology—head and neck surgery, and Professorof neurological surgery with the Otolaryngology
Department, Medical School, Case Western University, Cleveland. He is alsothe Medical Director of the Adult and Pediatric Cochlear Implant Program andCo-Director of the Skull Base Surgery Program. His clinical interests includeotology, neurotology, cochlear implantation, and skull-base surgery.