Embed Size (px)
Citation preview
![Page 1: [IEEE 2011 IEEE Radar Conference (RadarCon) - Kansas City, MO, USA (2011.05.23-2011.05.27)] 2011 IEEE RadarCon (RADAR) - Bayesian parametric GLRT for knowledge-aided space-time adaptive](https://reader031.dokumen.tips/reader031/viewer/2022030104/57509f661a28abbf6b1958f8/html5/thumbnails/1.jpg)
BAYESIAN PARAMETRIC GLRT FOR KNOWLEDGE-AIDEDSPACE-TIME ADAPTIVE PROCESSING
Pu Wang, Hongbin Li
Stevens Institute of TechnologyHoboken, NJ 07030, USA
Braham Himed
AFRL/RYMDDayton, OH 45433, USA
ABSTRACT
In this paper, the problem of detecting a multichannel signal in thepresence of spatially and temporally colored disturbance is consid-ered. By modeling the disturbance as a multichannel auto-regressive(AR) model and treating the spatial covariance matrix as a randommatrix, a parametric generalized likelihood ratio test (P-GLRT) isdeveloped based on a Bayesian framework. The resulting P-GLRT,which is denoted as the knowledge-aided P-GLRT (KA-PGLRT),employs a fully Bayesian principle and performs a jointly spatio-subtemporal whitening process. The KA-PGLRT detector is able toutilize some prior knowledge through a colored loading step betweenthe prior spatial covariance matrix and the conventional estimate ofthe P-GLRT. Simulation results verify that the KA-PGLRT detectoryields better detection performance over other parametric detectors.
Index Terms— Knowledge-aided space-time adaptive signalprocessing, parametric approach, generalized likelihood ratio test,Bayesian inference, multichannel auto-regressive model.
1. INTRODUCTION
Space-time adaptive processing (STAP) has been successfully uti-lized to mitigate the effect of clutter and/or interference in radar,remote sensing, and communication systems [1]. Traditional co-variance matrix-based STAP detectors involve estimating and invert-ing the space-time covariance matrix, which imposes large trainingrequirement and extensive computational burden [1]. To addressthese problems, among other techniques, e.g., the reduced-rank ap-proach [2] and the reduced-dimension approach [3], a class of para-metric STAP detectors provide an efficient way to mitigate the re-quirement of excessive training signals and reduce the computationalcomplexity ( [4–10] and reference therein). The parametric STAPdetectors assume a multichannel auto-regressive (AR) model for thedisturbances in both test and training signals, and have been veri-fied with simulated and measured datasets [4, 11]. Examples of theparametric STAP detectors are the parametric adaptive matched fil-ter (PAMF) [4], the parametric Rao (P-Rao) test [6], and the simpli-fied parametric generalized likelihood ratio test (P-GLRT) [9]. It hasbeen seen that the parametric STAP detectors requires less trainingsignals and significantly reduces the computational complexity byreplacing joint spatial-temporal whitening of the covariance matrixbased approach by successive temporal and spatial whitenings.
In this paper, we consider the above detection problem from aBayesian viewpoint, when the disturbance is modeled as a stochas-tic multichannel AR process. The stochastic AR process assumes
This work was supported in part by a subcontract with Dynetics, Inc.for research sponsored by the Air Force Research Laboratory (AFRL) underContract FA8650-08-D-1303.
that the spatial covariance matrix of the disturbance is random withmean a priori matrix. Following this stochastic model, a P-GLRTdetector is developed from a Bayesian framework by first comput-ing the integrated likelihood ratio (averaged over the random spatialcovariance matrix) and then maximizing the integrated likelihoodratio with respect to the deterministic temporal correlation matricesunder both hypotheses and the unknown signal amplitude under thealternative hypothesis. The resulting P-GLRT detector is able to uti-lize the prior knowledge as well as both test and training signals toassist the detection and, hence, is denoted as the knowledge-aidedP-GLRT (KA-PGLRT) detector. More specifically, the KA-PGLRTdetector appears to be the colored loading version of the simplified P-GLRT [9]. In other words, both P-GRLT detectors can be consideredas a whitening filter performing consecutive J(P + 1) × J(P + 1)spatial-subtemporal whitenings, where J is the number of channelsand P is the AR order, except that the KA-PGLRT detector utilizesthe prior knowledge to construct the J(P +1)×J(P +1) whiteningmatrix via a colored loading step.
The rest of this paper is organized as follows. Section 2 containsthe signal model. Section 3 shows the derivation of the KA-PGLRTdetector from a Bayesian framework. Simulation results and conclu-sions are provided in Sections 4 and 5, respectively.
2. SIGNAL MODEL
The problem of interest is to detect a known multichannel signal withunknown amplitude in the presence of spatially and temporally cor-related disturbance:
H0 : x0(n) = d0(n), n = 0, 1, · · · , N − 1
H1 : x0(n) = αs(n) + d0(n), n = 0, 1, · · · , N − 1(1)
where all vectors are J × 1 vectors, J denotes the number of spatialchannels, and N is the number of temporal observations. In thesequel, x0(n) is referred to as the test signal, s(n) is the knownsteering vector, and α is an unknown complex-value amplitude, andd0(n) is the disturbance signal that may be correlated in space andtime. Besides the test signal x0(n), there may be a set of target-free training signals xk(n), k = 1, 2, · · · , K, to assist in the signaldetection:
xk(n) = dk(n), k = 1, · · · , K, (2)
which dk(n) is assumed to be independent and identically dis-tributed (i.i.d.) with respect to the disturbance d0(n). As stated inIntroduction, the parametric approach imposes a parametric model-ing of the disturbance in both test and training signals:
• AS1 — Multichannel AR Model: In both test and trainingsignals, the disturbance signals dk(n), k = 0, . . . , K, can be
978-1-4244-8900-8/11/$26.00 ©2011 IEEE 329
![Page 2: [IEEE 2011 IEEE Radar Conference (RadarCon) - Kansas City, MO, USA (2011.05.23-2011.05.27)] 2011 IEEE RadarCon (RADAR) - Bayesian parametric GLRT for knowledge-aided space-time adaptive](https://reader031.dokumen.tips/reader031/viewer/2022030104/57509f661a28abbf6b1958f8/html5/thumbnails/2.jpg)
modeled as a J-channel AR(P ) process with a known modelorder P :
dk(n) = −P∑
i=1
AH(i)dk(n − i) + εk(n), (3)
where (·)H denotes the complex conjugate transpose, A(i), i =1, · · · , P , denote the unknown J×J AR coefficient matrices, εk(n)denote the J×1 driving noise vectors that are temporally white (overn) but spatially colored Gaussian noise: {εk(n)}K
k=0 ∼ CN (0,Q)with Q denoting the unknown J × J spatial covariance matrix.
In addition to the above assumption, we further assume thatthe spatial covariance matrix Q of the driving noise is random dis-tributed with an inverse complex Wishart distribution:
• AS2 — Random Spatial Covariance Matrix: The ran-dom spatial covariance matrix Q follows an inverse complexWishart distribution with degrees of freedom μ and mean Q(cf. [12, 13]):
p(Q) =
∣∣(μ − J)Q∣∣μ
Γ(J, μ) |Q|(μ+J)e−(μ−J) tr(Q−1Q), (4)
where Γ(J, μ) = πJ(J−1)/2 ∏Jk=1 Γ (μ − J + k) with Γ denoting
the Gamma function. Q can be considered as the prior knowledge,which can be obtained from previously acquired database, e.g., digi-tal terrain maps, synthetic aperture radar (SAR) images. The param-eter μ reflects the reliability of the prior knowledge R. The larger μis, the more reliable R is.
3. KNOWLEDGE-AIDED P-GLRT DETECTOR
According to the signal model in Section II, a parametric GLRT de-tector is developed from a Bayesian framework, which first utilizesthe prior distribution of the spatial covariance matrix by comput-ing the integrated likelihood ratio test and, then, maximizes the in-tegrated likelihood ratio test over unknown AR coefficient matricesA =
[AT (1),AT (2), · · · ,AT (P )
]T ∈ CJP×J and unknown am-
plitude α. The integrated likelihood ratio test takes the form of
T =max
αmaxA
∫f1 (x0,x1, · · · ,xK |α,A,Q ) p(Q)dQ
maxA
∫f0 (x0,x1, · · · ,xK |A,Q ) p(Q)dQ
. (5)
where
fi (x0,x1, · · · ,xK |α, A,Q )
=
[1
πJ |Q| exp{− tr
(Q−1Σi (α, A)
)}](K+1)(N−P )
(6)
with
Σi (α,A) =1
(K + 1) (N − P )
K∑k=0
N−1∑n=P
εk (n) εHk (n), (7)
and
ε0 (n) =x0 (n) − αs (n)
+P∑
p=1
AH (p) [x0 (n − p) − αs (n − p)] (8)
εk (n) =xk (n) +P∑
p=1
AH (p)xk (n − p) . (9)
Note that α = 0 if i = 0 (i.e., H0) and α �= 0 if i = 1.The integration in (5) can be obtained as∫
fi (x0,x1, · · · , xK |α, A,Q ) p(Q)dQ
=
∣∣(μ − J) Q∣∣μ Γ(J,L − J)
πJ(K+1)(N−P )Γ(J, μ)|Ξi(α, A)|−L+J , (10)
where L = (K + 1) (N − P ) + (μ + J) and Ξi(α, A) =(K + 1) (N − P )Σi(α,A) + (μ − J) Q. From (7), the matrixΞi(α,A) can be rewritten as
Ξi(α,A) =K∑
k=0
N−1∑n=P
εk (n) εHk (n) + (μ − J) Q
=Rxx (α) + RHyx (α)A + AHRyx (α)
+ AHRyy (α)A + (μ − J) Q, (11)
where
Rxx (α) =N−1∑n=P
[x0 (n) − αs (n)] [x0 (n) − αs (n)]H
+
K∑k=1
N−1∑n=P
xk (n)xHk (n), (12)
Ryy (α) =N−1∑n=P
[y0 (n) − αt (n)] [y0 (n) − αt (n)]H
+K∑
k=1
N−1∑n=P
yk (n)yHk (n), (13)
Ryx (α) =
N−1∑n=P
[y0 (n) − αt (n)] [x0 (n) − αs (n)]H
+K∑
k=1
N−1∑n=P
yk (n)xHk (n), (14)
and the JP ×1 vectors yk(n) and t(n) are, respectively, the regres-sion vectors of xk(n) and s(n):
yk (n) =[xT
k (n − 1) , · · · , xTk (n − P )
]T
, (15)
t (n) =[sT (n − 1) , · · · , sT (n − P )
]T
. (16)
With the help of (10), the integrated likelihood ratio test of (5) issimplified to
T =max
αmax
A|Ξ1(α, A)|−L+J
maxA
|Ξ0(A)|−L+J∝
minA
|Ξ0(A)|min
αmin
A|Ξ1(α,A)| . (17)
The next step is to find the estimates of A under both hypotheseswhich maximize the determinant of Ξi. The maximization of |Ξi|with respect to A yields [6, Appendix A, eq. (44)]
Ai,ML = −R−1yy (α) Ryx (α) , (18)
where α = 0 if i = 0. Taking the above estimates of A back into(17), the integrated likelihood ratio test is further simplified to
T =
∣∣∣Rxx (0) − RHyx (0) R−1
yy (0) Ryx (0) + (μ − J) Q∣∣∣
minα
∣∣∣Rxx (α) − RHyx (α) R−1
yy (α) Ryx (α) + (μ − J) Q∣∣∣ .
(19)
978-1-4244-8900-8/11/$26.00 ©2011 IEEE 330
![Page 3: [IEEE 2011 IEEE Radar Conference (RadarCon) - Kansas City, MO, USA (2011.05.23-2011.05.27)] 2011 IEEE RadarCon (RADAR) - Bayesian parametric GLRT for knowledge-aided space-time adaptive](https://reader031.dokumen.tips/reader031/viewer/2022030104/57509f661a28abbf6b1958f8/html5/thumbnails/3.jpg)
The final step is to find the estimate of α which maximizes the fol-lowing cost function
∣∣Rxx(α) − RHyx(α)R−1
yy (α)Ryx(α) + (μ −J)Q
∣∣ under H1. In general, the cost function of α is highly non-linear and the exact maximum likelihood (ML) estimate of α hasno closed-form expression. To circumvent this challenge, we applythe theory of Schur complement to decompose the cost function intoan α-dependent and an α-independent components (similar to thederivations in [9, Appendices I & II]) and obtain an asymptotic MLestimate of α with a closed-form expression:
αAML =tr{SHR−1
X X0} − tr{THR−1Y Y0}
tr{SHR−1X S} − tr{THR−1
Y T} , (20)
where
S = [sP+1 (P ) , · · · , sP+1 (N − 1)] ∈ CJ(P+1)×(N−P ), (21)
Xk = [xk,P+1 (P ) , · · · ,xk,P+1 (N − 1)] , k = 0, · · · , K. (22)
T = [t (P ) , · · · , t (N − 1)] ∈ CJP×(N−P ), (23)
Yk = [yk (P ) , · · · ,yk (N − 1)] , (24)
with two new variables defined as
sP+1 (n) =[tT (n) , sT (n)
]T
, (25)
xk,P+1 (n) =[yT
k (n) ,xTk (n)
]T
. (26)
The whitening matrices RX and RY are defined, respectively, as
RX =X0P⊥S XH
0 +K∑
k=1
XkXHk + Q, (27)
RY =Y0P⊥T YH
0 +
K∑k=1
YkYHk . (28)
where P⊥S = I − PS = I − SH
(SH
)†with (·)† denoting the
Moore-Penrose pseudoinverse, P⊥T = I − TH
(TH
)†, and
Q =
[0 00 (μ − J) Q
]. (29)
It is noted that the whitening matrix RX is a colored loading versionof its counterpart in the simplified P-GLRT (see [9, eq. (24)]), whilethe whitening matrix RY is the same as the one in the simplified P-GLRT (see [9, eq. (25)]). This colored loading step in (27) linearlycombines the conventional estimate of RX , i.e., [9, eq. (24)], andthe prior knowledge Q via Q.
Replacing the asymptotic ML estimate of α into the integratedlikelihood ratio test in (19), the test statistic of the KA-PGLRT isobtained as
TKA-PGLR
=
∣∣∣∣N−1∑n=P
sHP+1 (n) R−1
X x0,P+1 (n) −N−1∑n=P
tH (n) R−1Y y0 (n)
∣∣∣∣2
N−1∑n=P
sHP+1 (n) R−1
X sP+1 (n) −N−1∑n=P
tH (n) R−1Y t (n)
H1≷H0
γKA-PGLR, (30)
where γKA-PGLR is a threshold subject to the probability of falsealarm. It is seen that the KA-PGLRT detector extends the simplified
P-GLRT (see [9, eq. (28)]) through a knowledge-aid step whichincorporates the prior knowledge Q via RX of (27). It can bealso shown that the KA-PGLRT detector is equivalent to a partialspatio-temporal whitening across J(P +1) dimensions, same as thesimplified P-GLRT detector. This equivalence can be establishedsimilar to the derivation in Appendix IV of [9]. This knowledge-assisted partial spatio-temporal whitening of the KA-PGLRT detec-tor is in between a joint spatio-temporal whitening of the covariancematrix-based approach across the JN dimensions and successivelytemporal and spatial whitening of the typical parametric detectors,e.g., the PAMF and P-Rao test [4, 6].
4. NUMERICAL EVALUATION
Simulation results are provided to verify the proposed KA-PGLRTdetector. Performance comparisons with respect to: 1) the standardPAMF with the ML estimate Q from training signals [4]; 2) thePAMF with Q as a non-adaptive estimate of Q, denoted as the para-metric matched filter (PMF); 3) the Bayesian PAMF (B-PAMF) [10];4) the simplified P-GLRT [9]; and 5) the recently introduced KA-PAMF developed in an ad hoc two-step procedure [14], are consid-ered for considered scenarios. The disturbance signal dk is gen-erated as a multichannel AR(2) process with a AR coefficient Aand a spatial covariance matrix Q. The signal vector s correspondsto a uniform linear array with randomly selected normalized spatialand Doppler frequencies. The (average) signal-to-interference-plus-noise ratio (SINR) is defined as
SINR = |α2|sHR−1s, (31)
where R is the spatial-temporal covariance matrix corresponding tothe selected A and the a priori matrix Q.
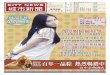
The training-deficient cases are particularly challenging in prac-tice. In the first scenario, the number of pulses is N = 16 and thenumber of channels is J = 4. It has been shown that, if N � J ,the conventional parametric detectors such as the P-Rao test andthe P-GLRT can cope with very limited or even no training signals.Therefore, it is extremely competitive to compare the proposed KA-PGLRT detector with conventional parametric detectors in this case.Fig. 1 shows the probability of detection versus SINR when μ = 12and Pf = 0.01. It is seen that, except the non-adaptive PMF, alladaptive parametric detectors have close performance of detection,which indicates that K = 2 training signals and N = 16 tempo-ral samples are adequate in the current case for the estimation ofthe unknown parameters, e.g., A and α. It is also noted that theproposed KA-PGLRT exhibits the best performance among all para-metric detector. The two-step KA-PAMF [14], which is also ableto utilize the prior knowledge, is slightly worse than the simplifiedP-GLRT of [9], but outperforms the conventional PAMF and the B-PAMF of [10] which was designed to handle a class of stochasticnon-homogeneous environment.
In the second scenario, we reduce the number of pulses to N =8, a less favorable case for the conventional parametric detectors.With the same amount of training signals K = 2 as in the first sce-nario, the conventional parametric detectors are expected to expe-rience some degradation as the number of pulses N reduces. Thesimulation results are shown in Fig. 2. It is seen that, in this chal-lenging case, the proposed KA-PGLRT detector provides the bestresult among all considered parametric detectors. More specifically,the KA-PGLRT detector gives about 2.5 dB performance gain overboth the simplified P-GLRT and the two-step KA-PAMF when the
978-1-4244-8900-8/11/$26.00 ©2011 IEEE 331
![Page 4: [IEEE 2011 IEEE Radar Conference (RadarCon) - Kansas City, MO, USA (2011.05.23-2011.05.27)] 2011 IEEE RadarCon (RADAR) - Bayesian parametric GLRT for knowledge-aided space-time adaptive](https://reader031.dokumen.tips/reader031/viewer/2022030104/57509f661a28abbf6b1958f8/html5/thumbnails/4.jpg)
−5 0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SINR (dB)
Pro
babi
lity
of d
etec
tion
K=2, J=4, N=16, μ=12, Pf=0.01, AR(2)
PMFPAMFB−PAMFSimplified P−GLRTKA−PAMFKA−PGLRT
Fig. 1. Training-limited case with adequate temporal/pulses ob-servations (N = 4J): Probability of detection versus SINR whenJ = 4, N = 16, P = 2, K = 2, μ = 12 and Pf = 0.01.
probability of detection is about 0.9. The PMF maintains its detec-tion performance close to that of the B-PAMF by using the priorknowledge Q only as a non-adaptive spatial whitening matrix, whilethe conventional PAMF gives much worse performance since it isunable to learn unknown parameters reliably from the limited size ofsignals with K = 2 training signals and N = 8 pulses.
5. CONCLUSION
In this paper, a stochastic multichannel auto-regressive process is in-troduced to model the spatially and temporally colored disturbanceby treating the spatial covariance matrix of the driving noise as arandom matrix. According to this stochastic model, a parametricGLRT detector is proposed and it turns out to be a knowledge-aidedversion of the recently introduced simplified P-GLRT [9]. The re-sulting KA-PGLRT detector uses a colored loading step to incorpo-rate some available prior knowledge to assist the space-time adap-tive processing. Performance comparisons with various parametricdetectors show the the KA-PGLRT detector enhances the detectionperformance in challenging scenarios. Future efforts will be placedon performance verification of the KA-PGLRT detector in more re-alistic datasets.
6. REFERENCES
[1] J. Ward, “Space-time adaptive processing for airborne radar,”Technical Report 1015, Lincoln Laboratory, MIT, December1994.
[2] A. Haimovich, “The eigencanceler: Adaptive radar by eigen-analysis methods,” IEEE Transactions on Aerospace and Elec-tronic Systems, vol. 32, no. 2, pp. 532–542, April 1996.
[3] H. Wang and L. Cai, “On adaptive spatial-temporal processingfor airborne surveillance radar systems,” IEEE Trans. Aerosp.Electron. Syst., vol. 30, no. 3, pp. 660–670, July 1994.
[4] J. R. Roman, M. Rangaswamy, D. W. Davis, Q. Zhang,B. Himed, and J. H. Michels, “Parametric adaptive matchedfilter for airborne radar applications,” IEEE Trans. Aerosp.Electron. Syst., vol. 36, no. 2, pp. 677–692, April 2000.
−5 0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SINR (dB)
Pro
babi
lity
of d
etec
tion
K=2, J=4, N=8, μ=12, Pf=0.01, AR(2)
PMFPAMFB−PAMFSimplified P−GLRTKA−PAMFKA−PGLRT
Fig. 2. Training-limited case with moderate temporal/pulses ob-servations (N = 2J): Probability of detection versus SINR whenJ = 4, N = 8, P = 2, K = 2, μ = 12 and Pf = 0.01.
[5] P. Parker and A. L. Swindlehurst, “Space-time auto-regressivefiltering for matched subspace STAP,” IEEE Trans. Aerosp.Electron. Syst., vol. 39, no. 2, pp. 510–520, April 2003.
[6] K. J. Sohn, H. Li, and B. Himed, “Parametric Rao test formultichannel adaptive signal detection,” IEEE Transactions onAerospace and Electronic Systems, vol. 43, no. 3, pp. 920–933,July 2007.
[7] S. Lawrence Marple, Jr., P. M. Corbell, and M. Rangaswamy,“Multi-channel fast parametric algorithms and performance foradaptive radar,” in Proceedings of 41th Asilomar Confer-ence on Signals, Systems, and Computers, Pacific Grove, CA,November 2007, pp. 1835–1838.
[8] Y. I. Abramovich, N. K. Spencer, and M.D.E. Turley, “Time-varying autoregressive (TVAR) models for multiple radar ob-servations,” IEEE Transactions on Signal Processing, vol. 55,no. 4, pp. 1298–1311, April 2007.
[9] P. Wang, H. Li, and B. Himed, “A new parametric GLRT formultichannel adaptive signal detection,” IEEE Trans. SignalProcess., vol. 58, no. 1, pp. 317–325, January 2010.
[10] P. Wang, H. Li, and B. Himed, “A Bayesian parametric test formultichannel adaptive signal detection in non-homogeneousenvironments,” IEEE Signal Process. Letters, vol. 17, no. 4,pp. 351–354, April 2010.
[11] J. H. Michels, M. Rangaswamy, and B. Himed, “Performanceof parametric and covariance based STAP tests in compound-Gaussian clutter,” Digital Signal Processing, vol. 12, no. 2,3,pp. 307–328, April and July 2002.
[12] O. Besson, J.-Y. Tourneret, and S. Bidon, “Knowledge-aidedBayesian detection in heterogeneous environment,” IEEE Sig-nal Processing Letters, vol. 14, no. 5, pp. 355–358, May 2007.
[13] A. De Maio, A. Farina, and G. Foglia, “Knowledge-aidedBayesian radar detectors & their application to live data,” IEEETransactions on Aerospace and Electronic Systems, vol. 46, no.1, pp. 170–183, February 2010.
[14] P. Wang, H. Li, and B. Himed, “Knowledge-aided parametricGLRT for space-time adaptive processing,” in Proceedings of44th Asilomar Conference on Signals, Systems, and Comput-ers, Pacific Grove, CA, November 2010.
978-1-4244-8900-8/11/$26.00 ©2011 IEEE 332