Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/1.jpg)
Evaluating geometrical properties of virtual shapes
using interactive sonification
Miguel Alonso1, Simon Shelley1, Dik Hermes1
1Human Technology Interaction,
Eindhoven University of Technology,
P.O. Box 513, NL 5600 MB,
Eindhoven, The Netherlands
Phone: +31 40 247 2888, Fax: +31 40 244 9875,
E–mail: [email protected]
Armin Kohlrausch1,2
2Digital Signal Processing Group
Philips Research Europe–Eindhoven,
High Tech Campus 36, NL 5656 AE,
Eindhoven, The Netherlands
E–mail: [email protected]
Abstract—This papers presents some of our research aboutthe use of sound in a multimodal interface. The aim of thisinterface is to support product design, where the designer is ableto physically interact with a virtual object. The requirementsof the system include the interactive sonification of geometricaldata relating to the virtual object. In this paper we presentthree alternative sonification approaches designed to satisfy thiscondition. We also outline a user evaluation strategy aimed atmeasuring the performance and added value of the differentsonification approaches.
Index Terms—sonification, sound synthesis, modal synthesis,virtual objects, haptics.
I. INTRODUCTION
Nowadays, a research topic that has attracted much attention
in the area of product design is offering designers the oppor-
tunity to exploit their abilities to create and manipulate virtual
objects using multi-sensory interaction. In such a system a
number of sensory modalities can be used to simultaneously
communicate to the user information relating to the product.
In addition, the product designer is ideally able to manipulate
the object of interest using a hands-on intuitive approach.
From a user point of view, a significant advantage of using
a Virtual Environment (VE) is the ability to communicate
information that is generally not perceived in the real world. So
far this research has been largely concentrating on visual and
haptic sensory modalities and few attempts have been made
to incorporate sound into the process.
The research described in this article is being carried out
as part of the SATIN project (Sound And Tangible Interfaces
for Novel product design), which consists of an augmented
reality environment where the user can manipulate virtual 3-D
objects [1]. The user will be able to see the object and to both
explore and modify the shape of the object through the use of
touch. For this project, currently the user interaction is limited
to a 2-D cross-sectional slice of the virtual object’s surface,
however the user is free to select this slice from any part of
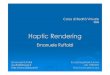
the 3-D object. An example of a cross-section of a 3-D virtual
object is illustrated in Figure 1.
A specific requirement of the SATIN project is the presen-
tation to the user of data relating to shape and curvature of
Fig. 1. Example of a virtual 3-D object with a 2-D cross-sectional slice
highlighted.
the surface of the interactive object. This article focuses on
this particular aspect. Shape and curvature data are of special
interest to designers when considering the aesthetic quality
of the object’s surface. In industrial design for example, a
smooth surface that is continuous in terms of curvature is
highly desirable because discontinuities in curvature result in a
disconnected appearance in the light reflected from the surface.
Designers refer to such surfaces as Class A surfaces and they
consider them as being aesthetically appealing [2].
Sonification is considered to be an advantageous solution for
presenting geometrical data, as previously shown in [3]. There
are other potential media for communicating this information
such as visualization and haptic devices. These media, how-
ever, are chiefly employed in the SATIN project to present
to the user the shape of the virtual object. For this reason,
sound provides a useful medium to display and highlight a
wider range of geometrical properties, many of which are not
normally detectable by touch or vision.
This paper is organized as follows. Section II presents the
principles and motivation for the use of sonification in the
SATIN project. In section III we propose and describe three
different sonification strategies. In section IV a procedure for
their evaluation is presented.
II. THEORETICAL BACKGROUND
The representation of geometrical data using audio signals
is a form of sonification. Sonification is defined by the board
HAVE 2008 – IEEE International Workshop on Haptic Audio Visual Environments and their Applications Ottawa – Canada, 18-19 October 2008
978-1-4244-2669-0/08/$25.00 ©2008 IEEE
![Page 2: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/2.jpg)
of the International Community for Auditory Display (ICAD)
as “the use of non-speech audio to convey information. More
specifically, sonification is the transformation of data relations
into perceived relations in an acoustic signal for the purposes
of facilitating communication or interpretation” [4]. In the
context of the SATIN project the sonification is dependent on
the interaction between the user and the virtual object and this
type of sonification is referred to as interactive sonification
[5], [6]. The sound that is produced therefore may depend
both on the geometrical parameter value to be sonified, and
on the nature of the user interaction. In general a mathematical
relationship, referred to as a mapping, is required between the
geometrical data to be sonified and some specific property,
or properties, of the sound. Such mappings result in sounds
that are not naturally produced by the equivalent real-world
objects. Owing to their abstract nature, we characterize such
sounds as symbolic [7].
Although in the SATIN project the user will be able to select
from a larger number of geometrical features to be sonified,
for the purpose of this article we only focus on the following
properties.
• Curve shape. Since we only consider a 2-D cross-
sectional slice of the virtual object’s surface, the curve
shape is a plane curve C represented by a two-
dimensional function, such as the one highlighted in
Figure 1.
• Curvature. For a plane curve C, the curvature at point p
has a magnitude equal to the reciprocal of the radius of
the osculating circle, i.e. the circle that shares a common
tangent to the curve at the point of contact. The curvature
is a vector that points to the centre of the osculating
circle. For a plane curve given explicitly as C = f(p)the curvature is given by:
K =
d2Cdp2
(
1 +[
dCdp
]2)
3
2
. (1)
In this project we only focus on the sonification of
the curvature’s magnitude, however, we also consider
whether the curve is concave (K > 0) or convex (K < 0).
An optional specific sonification will also be provided
at points when the curvature sign changes. These are
referred to as Inflection Points, and they are found in
the same location as the roots of the second derivative of
the curve shape.
• Tangency, this is defined as the value providing the angle
between the tangent line at given point p on the plane
curve C and a reference direction. We consider tangent
to be the first derivative of the curve shape as a function
of position, i.e. dCdp
.
• Discontinuities in either curve shape, curvature or tan-
gency. Every point in the plane curve C for which any
of the three previously mentioned geometrical properties
step or jump abruptly from a connected point of the
graph to another is considered to represent a discontinuity.
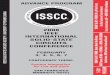
(a)
(b)
(c)
Surface
Fig. 2. Modes of user interaction with the virtual model.
Formally, in this case a discontinuity is a point for which
the limits from the left and right sides both exist but are
not equal to each other.
For the sake of clarity, curve shape, curvature and tangency
are considered as continuous geometrical parameters, whereas
discontinuities and inflection points are referred to as discrete
geometrical parameters. Currently, we only consider the soni-
fication of one continuous geometrical parameter at a time, and
the user is able to select the parameter of interest in this case.
On the other hand, it is possible in our application to sonify
multiple discrete geometrical parameters simultaneously. It
is also possible to sonify continuous geometrical parameters
and discrete geometrical parameters simultaneously. Again the
discrete geometrical parameters that are to be rendered audible
can be selected according to user preference.
During the sonification of these geometrical properties three
different modes of haptic interaction are considered, as illus-
trated in Figure 2. These modes are used to evaluate and
explore the shape of the virtual object. The first involves
the impact between the user’s hand/finger and the model
at a certain point, for example by tapping the object, as
shown in Figure 2(a). The second, Figure 2(b), involves a
sustained contact with the object without movement. Finally,
the third type of interaction, Figure 2(c), involves sliding a
hand or finger over the object. These modes of interaction
are an important consideration when designing the sonification
process, as they directly influence the sound that is produced.
For example if the user taps the haptic interface at a given
point, the sound produced may be different to that produced
if a sustained contact with the surface is made at that same
point.
The SATIN project consists of a consortium of nine part-
ners, spread across a range of different European countries.
Different tasks within this project have been assigned to each
![Page 3: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/3.jpg)
partner and the sonification module is being developed in
parallel to the other system components [1]. As the final haptic
interface is in development, we are currently using a digital
drawing tablet (sometimes referred to as a Wacom tablet) as
an alternative input device. Contact between the drawing tablet
pen and the tablet is analogous to contact between the user’s
finger and the haptic device in the SATIN project. The position
of contact along the x-axis of the drawing tablet is equivalent
to the position of finger contact along the length of the selected
cross-sectional profile represented by the haptic interface. To
ensure future compatibility, the resolution of the drawing tablet
has been matched to the specifications of the haptic device.
The Max/MSP environment is used for the purpose of
development and prototyping of the audio feedback module.
Max/MSP is a graphical development environment for music,
sound synthesis and multimedia. The program is highly mod-
ular, with a library of existing routines in the form of shared
libraries. In addition, an Application Program Interface (API)
allows third-party development of new routines, called external
objects. The sound is output via a stereo speakers setup.
III. SONIFICATION APPROACHES
The selection of sound synthesis approaches and mapping
strategies to sonify the geometrical data of interest has a
significant effect on how the information is perceived by the
user. In practice there is an unlimited range of options for
sonification, with the result that there is a large degree of
freedom in the development of the sounds. At this stage we
have implemented a number of sonification strategies based
on the sound synthesis approaches described below.
In each of these approaches, the sound that is produced
depends on the position of contact between the user’s finger
and the haptic device, the geometrical parameter associated
with that position and the mode of interaction. If no contact
is made, no sound is produced.
A. Basic synthesis
This is a straightforward and empirical sound synthesis
approach that also served as a proof of concept during the
early stages of development. The first step for this approach
is to select a carrier sound. Ideally this carrier must have a
single discernible fundamental frequency, or centre frequency,
associated with it. In the simplest case a pure tone can be used,
or other basic signals such as a periodic sawtooth waveform
or narrow-band noise. For this approach, the sound that is
produced depends only on whether or not there is contact
between the user’s finger and the haptic interface, and not
on the specific modes of interaction presented in Figure 2.
The value of the continuous geometrical parameter of in-
terest is mapped to the frequency associated with the carrier
sound. The mapping is implemented in such a way that
the minimum absolute value of the geometrical parameter
Fig. 3. GUI for basic synthesis sonification.
is mapped to a minimum frequency and the maximum ab-
solute value found in the dataset is mapped to a maximum
frequency. Additionally, linear changes in the geometrical
parameter of interest are mapped to logarithmic changes in
the sound carrier frequency. Frequency is a good choice for
this mapping because humans perceive frequency changes
with a relatively high resolution. Typically, frequency changes
can be determined with an accuracy of up to 0.3% [8]. In
addition, this use of frequency as relevant mapping parameter
has the advantage that its perception is generally not dependent
on the acoustic characteristics of the space surrounding the
system. The minimum and maximum frequency values should
be chosen to give a wide frequency range, well within the
human audible frequency range. During operation, the user is
able to select the parameters of this sonification strategy, such
as the minimum frequency value, the frequency range and the
carrier signal, according to his/her preference. This is done
using a simple Graphical User Interface (GUI), as depicted in
Figure 3.
It is also possible to apply a modulation to the carrier
sound using a low frequency oscillator. This could take the
form of either an amplitude modulation (AM) or a frequency
modulation (FM). The frequency of this oscillator can also be
mapped to the continuous geometrical parameter of interest.
Such a mapping has the advantage that a parameter value
of 0 can be directly mapped to a modulation frequency of
0 Hz. This would result in no audible modulation and would
allow the user to recognize a null parameter value with relative
ease. Other mappings are possible, depending on the choice of
sound carrier. For example in the case of narrow-band noise,
the bandwidth of the noise can be used.
In the case of curvature data, it is necessary to inform the
user about whether the curvature is positive or negative. Here,
the sign of the curvature is mapped to the stereo panning
of the sound output in the following way. If the data are
negative, the output is weighted to the left channel. More
![Page 4: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/4.jpg)
precisely, if the absolute value of the negative data is more
than 20% of the maximum absolute value of the curvature
data, the sound is output entirely in the left channel, and no
output is heard in the right channel. Similarly, if the data are
positive, the output is weighted to the right channel, and if
the value is more than 20% of the maximum absolute value
of the dataset, the sound is output entirely in the right channel.
Between these two reference points, the output is linearly cross
faded between the two channels and a curvature value of 0 is
mapped to a sound reproduced from the middle between the
two loudspeakers. This mapping for curvature is in fact also
applied in all sonification strategies described in this paper.
To signify discontinuities in the curvature data, two different
modulations are applied to the sound. When the finger is
moved across a discontinuity position on the surface, the
amplitude of the audio output is rapidly increased and then
decreased, resulting in a click-like sound played in synchrony
with the fingers movement across the discontinuity. This sound
is easily distinguished from the pure tones associated with
ordinary curvature values and gives the user initial feedback
about the presence and the approximate position of the discon-
tinuity. In order to allow a precise exploration of the position of
the discontinuity, a specific sound is reproduced if the finger
rests on the exact position of the discontinuity. This sound
is made by rapidly alternating between the two frequencies
which correspond to the curvature values on either side of
the discontinuity. Discontinuity positions are thus the only
points along the surface at which the reproduced sound is not
stable over time, but is frequency-modulated. This modulation
continues until the finger moves away from the spatial position
of the discontinuity.
B. Modal synthesis
Modal synthesis is a physical modeling technique for sound
rendering, with theoretical roots in modal analysis [9]. The
aim of modal synthesis is to mimic the dynamic properties
of an elastic structure in terms of its characteristic modes of
vibration. A physical structure has an inherent set of modes
of vibration, determined by its material, its dimensions and
the conditions at its boundaries. Each mode can be defined
by its resonant frequency, damping factor and mode shape
(eigenfunction). In modal analysis, the goal is to separate
the equations of motion of a structure, so that they can be
solved separately and individual modes can be calculated.
By adding together these respective modal responses, the
frequency response of the entire structure can be found [9].
The modal synthesis implementation presented here is based
on research by van den Doel and Pai [10]. In this approach,
a modal model M is described for N modes at a specific
location on a physical object as: M = {fM , dM ,aM }. In
this definition, fM , dM , and aM are vectors of length N
containing the modal frequencies (in Hertz), the angular decay
rates (in Hertz) and the amplitude coefficients respectively.
The impulse response y(t) of M at the position of interest
in the object is
y(t) =N
∑
n=1
aMne−dMn
t sin(2πfMnt) (2)
for t ≥ 0 and is zero for t < 0 and y(t) corresponds to
the audio signal as a function of time. In [10] the authors
describe different methods to obtain the modal data from
real physical objects. Formulating these data is a non-trivial
operation, however, the authors have provided a wide range
of models whose modal parameters have been pre-calculated
according to the techniques presented in their paper.
In practice, Eq. (2) is implemented as a bank of second order
resonant band-pass filters. We have integrated the modal syn-
thesis method in this way with the Max/MSP sound platform
in the form of an external library written in the programming
language C. This library is able to load any modal synthesis
model file whose format is compatible with that defined in
[10].
In our implementation, to communicate continuous geomet-
rical data we map the magnitude of the parameter of interest to
the frequency scaling factor of the modal synthesis model. This
modification results in the replacement of fM in Eq. (2) with
f S = αfM , where α is the frequency scaling factor which is
directly proportional to the geometrical value of interest. The
relationship between the scaling factor and the geometrical
parameter is chosen in such a way that the spectral response of
the scaled model remains within the human audible frequency
range. The perceptual effect of frequency scaling in this way
gives the impression that as the scaling value α increases, the
modeled object M decreases proportionally in size. In order
to investigate this mapping strategy we loaded a selection of
different models proposed in [10]. For the case of curvature
sonification, we also experimented with the model of a circular
metal plate. The motivation to use this particular model stems
from the fact that curvature is the reciprocal of the radius of
the osculating circle of the curve at the point of interest, as
mentioned in section II. Since this model was not available in
the model library we implemented it by calculating the modal
frequencies by solving the wave equation for a circular plate
[11].
The sonification application has been developed with a GUI
that allows the user to control the frequency scaling and also
allows to scale the damping and amplitude coefficients of the
modal synthesis model. This GUI gives the user the ability to
explore the effects of modifying the model parameters and to
tune them according to his/her preferences.
In practice, there are two important considerations in the
modal synthesis approach described here. The first is the
nature of the signal used in the model implementation for the
excitation of the band-pass resonant filters, and the second is
how the application reacts to the different modes of interaction
described by Figure 2. In fact in our application, the nature
of the excitation signal is influenced by the interaction mode
as follows. If the user taps the haptic interface, as illustrated
by Figure 2(a), the model is excited by a short impulse.
![Page 5: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/5.jpg)
In the case of sustained contact with the haptic interface,
without movement of the finger (Figure 2(b)), the model
is only excited at the initial moment of contact, as in the
previous case. Following this initial excitation at the moment
of impact, the excitation depends on a preset defined by the
user. Either no excitation signal is produced, resulting in no
sound, or a continuous excitation signal is produced, with
constant parameters, consisting of user definable colored noise.
Finally, if the user’s finger slides over the haptic interface,
Figure 2(c), the excitation signal also consists of continuous
user definable colored noise. The user is also able to select
an option where the speed of the finger is mapped to the
amplitude of this noise carrier.
Concerning the sonification of discrete geometrical pa-
rameters, for example discontinuities and inflection points, a
different modal synthesis model to that used for the continuous
geometrical parameter currently being sonified is employed.
Ideally the model should be chosen so that its characteristic
sound can be easily distinguished from the sound of its
counterpart used for the continuous geometrical data. For
example, to sonify discrete geometrical parameters we have
used bell, wooden table or glass models. The only excitation
signal used for this model is a short impulse which is triggered
when the user comes into contact with the point where the
discrete geometrical parameter of interest is located. The
model settings for these parameters can also be modified by
the user through the GUI.
C. Wavetable Sampling Synthesis
Wavetable sampling synthesis [12] is an alternative ap-
proach to sound generation that can be used for the sonification
of geometrical parameters, as described previously. In order
to demonstrate how this approach can be used, we have
developed two alternative sonification strategies. As for the
other sonification approaches described here, a GUI is also
provided to allow the user to tune parameters relating to the
synthesis and mapping strategies involved in the process.
For the first sonification strategy, a continuous sound is
produced whilst the user remains in contact with the haptic
device. This continuous sound is made up of a pre-prepared
sample, or wavetable, that is repeatedly played back without
interruption, i.e. in a loop. To demonstrate this technique, we
chose a recording of the sound of a car engine as the sample
to be used. This sound is designed in such a way that, when
played back in a repeating loop, no audible interruption is
heard and the sound is similar to that of a car engine that
is running continuously. During the user’s exploration, the
continuous geometrical parameter of interest is mapped to
the speed of playback of the sample. As in the sonification
approaches described previously, this mapping is designed in
such a way that the spectral response that results from this
synthesis method remains within the human audible frequency
range.
For the second sonification strategy, the continuous ge-
ometrical data of interest are represented using a slightly
different method to that described previously. In this case, a
pre-prepared audio sample is chosen that is relatively short and
impulse-like. For our demonstration, we use a recorded sound
of a table tennis ball bouncing on the table. Whilst the user’s
finger remains in contact with the haptic device, this sample is
played back repeatedly, but with a period of silence between
each repetition. Although the sample playback speed remains
constant, the continuous geometrical parameter of interest is
mapped in such a way that an increase in the data value results
in a decrease in the length of the silence period between each
repetition. This has the effect of increasing the repetition rate
of the sample, without changing its pitch.
Discrete geometrical parameters can also be indicated using
sample-based synthesis, where different parameters of interest
can be represented by different audio samples. The samples
used in this case should also have characteristic sounds that
can be easily distinguished from the sounds used simultane-
ously to sonify other data. These samples are played back only
once, and are not repeated continuously. They are triggered
when the user comes into contact with the point where the
discrete geometrical parameter of interest is located. As an
example, in our demonstration we use the recorded sound of
a car-horn to indicate a discontinuity and the recorded sound
of a car changing gear to indicate an inflection point.
IV. EXPERIMENTAL USER EVALUATION OF SOUND
FEEDBACK
For the experimental evaluation of the sonification applica-
tion and the usability of the different sonification approaches,
we propose to measure the efficiency, the effectiveness, and the
satisfaction of the users. In the evaluation we will first generate
a number of different synthetic curve shapes (the other geo-
metrical properties of interest are calculated as a by-product).
These shapes, along with their geometrical properties, will
be rendered audible using a pre-defined set of sonification
strategies based on the methods described in section III. From
this, the users’ ability to derive a correct mental image of
the curve shape and its related geometrical properties will
be used as a measure for the usability of the system. In the
experiments, the users will be asked to touch and explore the
haptic interface, and to listen to the sound produced. The sub-
jects will consist of mathematically well trained subjects who
have a well developed idea of a mathematical function. They
should at least have followed elementary courses in calculus,
so that they are familiar with the concepts of discontinuity,
zero crossing, or positive and negative functions. The usability
of the system will be determined according to three criteria.
The first is the number of errors made by the users and the
second is the time it takes to perform the task. Finally, for
each sonification approach the users will be asked to rate on
a scale from 1 to 5 the naturalness, the intuitiveness, and the
difficulty of the task.
![Page 6: [IEEE 2008 IEEE International Workshop on Haptic Audio visual Environments and Games (HAVE 2008) - Ottawa, ON, Canada (2008.10.18-2008.10.19)] 2008 IEEE International Workshop on Haptic](https://reader030.dokumen.tips/reader030/viewer/2022022411/5750aa601a28abcf0cd77586/html5/page/6.jpg)
V. CONCLUSIONS
In this paper, we have presented the theoretical background
and motivation for the use of sonification in the context of
the SATIN project [1]. This project consists of a multimodal
augmented reality environment where the user can interact
with virtual 3D objects and sonification is considered to
be a complementary modality for evaluating a number of
geometrical properties relating to the objects, as detailed in
section II. An advantage of adopting a sonification approach
is that it can help the user to perceive geometrical properties of
shapes, such as curvature and tangency, that otherwise would
be hardly detectable using vision or touch. In section III, we
have proposed three different approaches to the sonification
problem. The first is based on the use of relatively simple
sound synthesis techniques. The second involves the use
of a physical modeling method known as modal synthesis.
The final approach employs pre-prepared sounds using the
technique known as wavetable sampling synthesis. All of the
proposed sonification strategies have been developed with the
fundamentals of human hearing in mind, however, the appli-
cations have been designed with a GUI that allows the user to
adjust sonification parameters according to his/her preferences.
In addition, we have shown how sound can be useful in
multimodal interfaces as a supportive and complementary tool.
Further testing is required to determine the improvement in
performance over purely graphical and haptic environments. A
user evaluation strategy has been outlined in order to measure
the added value of sound in the SATIN interface, and also to
compare different sonification techniques.
ACKNOWLEDGMENTS
The research work presented in this paper has been sup-
ported by the European Commission under the project FP6-
IST-5-054525 SATIN – Sound And Tangible Interfaces for
Novel product design.
REFERENCES
[1] (2006, October) Sound and tangible interfaces for novel product design.[Online]. Available: http://www.satin-project.eu/
[2] C. A. Catalano, B. Falcidieno, F. Giannini, and M. Monti, “A surveyof computer-aided modeling tools for aesthetic design,” Journal of
Computing and Information Science in Engineering, vol. 2, pp. 11–20,March 2002.
[3] R. Minghim and A. R. Forrest, “An illustrated analysis of sonificationfor scientific visualisation,” in Proc. 6th IEEE Visualization Conference,1995, pp. 110–117.
[4] (1997) Sonification report: Status of the field and research agenda. [On-line]. Available: http://www.icad.org/websiteV2.0/References/nsf.html/
[5] T. Hermann, “Sonification for exploratory data analysis,” Ph.D. disser-tation, Bielefeld University, Germany, 2002.
[6] T. Hermann and A. Hunt, “An introduction to interactive sonification,”IEEE multimedia, vol. 12, no. 2, pp. 20–24, 2005.
[7] S. Shelley, M. Alonso, D. Hermes, and A. Kohlrausch, “On the use ofsound for representing geometrical information of virtual objects,” inProceedings of the 14th International Conference on Auditory Display,Paris, France, July 2008, p. P 12.
[8] C. C. Wier, W. Jesteadt, and D. M. Green, “Frequency discrimination asa function of frequency and sensation level,” Journal of the Acoustical
Society of America, vol. 61, pp. 178–183, 1977.
[9] T. D. Rossing and N. H. Fletcher, Principles of Vibration and Sound,2nd ed. Springer, 2004.
[10] K. van den Doel and D. K. Pai, Audio anecdotes: tools, tips, and
techniques for digital audio. AK Press, 2004, ch. Modal Synthesisfor Vibrating Objects.
[11] A. W. Leissa, Vibration of Plates. Washington, D.C.: NASA SP-160,NASA, 1969.
[12] D. C. Massie, Applications of Digital Signal Processing to Audio and
Acoustics. Kluwer Academic Publishers, 1998, ch. Wavetable SamplingSynthesis, pp. 311–342.