Embed Size (px)
Citation preview

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri1
Sistemi di produzione discreti
•Sistem
i manifatturieri
•Sistem
i di trasporto•
Sistemi di m
ovimentazione
•R
obot industriali
I sistemi m
anifatturieri
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri2
I sistemi m
anifatturieri
I sistemi m
anifatturieri sono impianti dedicati
alla lavorazione e trasformazione di m
aterieprim
e per l’ottenimento di prodotti finiti.
Tipicamente, si intende sistem
i manifatturieri
discreti, in cui i prodotti hanno dimensioni
prefissate.Principali attività Im
pianti manifatturieri svolgono tipicam
ente:
–Lavorazioni
operazioni di trasformazione del prodotto
–Trasporto
prodotti, pallet, strumenti di lavoro
–Im
magazzinam
entoprodotti (grezzi, sem
ilavorati e finiti), strumenti di lavoro
L’automazione riguarda tutte tali attività!

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri3
Lavorazioni•
Rappresentano l’attività principale per cui
un impianto viene costruito
•V
e ne sono di tipi molto diversi, e cam
bianocon il cam
biare della tecnologia
•Lavorazioni: principali ed ausiliarie
Lavorazioni principali•
Meccaniche (con asportazione di truciolo)
•Per deform
azione plastica–
laminazione, trafilatura,stam
paggio•
Assem
blaggio•
Disassem
blaggio–
riciclaggio e recupero di componenti
(schede elettroniche, apparecchi elettrici, ...)•
Fusione•
Saldatura, colorazione, verniciatura,...
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri4
Lavorazioni ausiliarie•
Imm
atricolazione•
Controllo qualità
•Pulitura, lavaggio, lucidatura
•Etichettatura
•Im
ballaggio e confezionamento
Trasporto O
gni impianto m
anifatturiero è dotato disistem
i di trasporto (automatico o m
anuale)dei prodotti:
•dal m
agazzino dei prodotti grezzi al primo centro di
lavoro•
da un centro di lavoro al successivo•
dall’ultimo centro di lavoro al m
agazzino deiprodotti finiti

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri5
Trasporto M
ezzi di trasporto automatico dei prodotti:
•nastri e rulliere
•ascensori
•carrelli a guida autom
atica–
su binari o piste magnetiche
•m
anipolatori robotici–
fissi o mobili
•“carri-ponte”Trasporto
All’interno dell’im
pianto vengono anchem
ovimentati:
•pallet (vassoi che portano il prodotto)
–tipicam
ente, ricircolano nell’impianto
•utensili
–dal m
agazzino degli utensili alla macchina
–da una m
acchina ad un’altra (utensili condivisi)
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri6
Imm
agazzinamento
•M
agazzini servono per:–
accumulo prodotti grezzi/finiti/sem
ilavorati–
accumulo pallet
–accum
ulo utensili–
code in ingresso ad una macchina operatrice
–per assorbire diverse velocità di lavorazione
Esempio: sistem
a manifatturiero
con due centri di lavoro
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri7
I sistemi di trasporto
I sistemi di trasporto
Nel presente m
odulo vediamo i dispositivi
usati per la movim
entazione dei prodotti chesono tra i più com
uni negli impianti di
produzione automatizzati.
Scopo: imparare a com
prendere le dinamiche
principali, la tecnologia di base, e gli eventualivincoli im
posti al progetto dell’automazione.
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri8
Il pallet•
Dispositivo (vassoio) che porta il prodotto
•Form
a: dipende dal prodotto trasportato!•
Materiale: Legno/M
etallo/Plastica•
Dispositivi di bloccaggio prodotto:
–presenti, se il pallet entra in m
acchina perlavorazione
–assenti, se fa solo trasporto
•C
on informazioni sul tipo di prodotto
–m
emorizzate su pastiglie m
agnetiche
Esempio di pallet

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri9
I principali dispositivi•
Nastri e rulli
•Sensori di presenza
•Il blocco
•Il singolarizzatore
•Il sollevatore
Catene e rulliere
Catene di
trasportopallet
Assedella linea
Vistadall'alto
Assedella linea
Vistadall'alto
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri10
Sensori di presenza•
Contatti (sw
itch):•
Occorre assicurarsi che il prodotti “tocchi” sem
pre il sensore
•M
agnetici•
Non c’è contatto con il prodotto, m
a devo sapere a qualedistanza m
assima il prodotto si troverà rispetto al sensore e
sono più lenti (fenomeni m
agnetici)
•A
traguardo•
Non c’è contatto e il prodotto può essere di form
e anche molto
diverse
•O
ttici•fotocellule, fotodiodi, fototransistori, telecam
ere
Blocco pallet
•Se la linea di lavorazione ha m
olte stazionidi lavoro che non caricano il prodotto, m
a lolasciano sul sistem
a di trasporto, honecessità di allineare contam
poraneamente
più prodotti e stazioni.
•N
on potendo fermare la linea, posso
“bloccare” i pallet.

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri11
Blocco pallet
Assedella linea
catena ditrasporto
palletblocco
Assedella linea
catena ditrasporto
palletblocco
Vista laterale
Singolarizzatore
•In alcuni punti della linea, è opportunoform
are un accumulo di pallet (coda), per
disaccoppiare parti di impianto con velocità
di lavorazione diverse•
E’ quindi necessario, a valle della coda,separare i pallet per perm
etterne lalavorazione o il trasporto individuale
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri12
SingolarizzatoreAssedella linea
Assedella linea
Singolarizzatore
Vista laterale
Sollevatore
Pallet
Sollevatore
Catene di
trasporto
Vista laterale
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri13
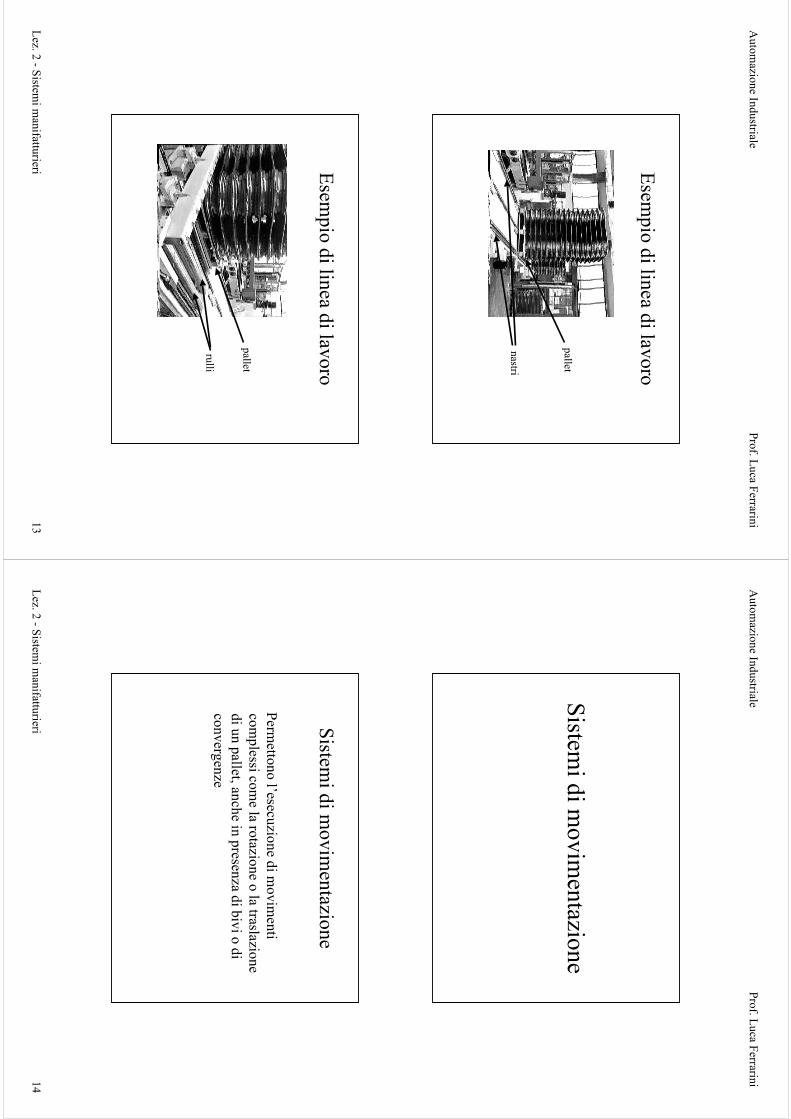
Esempio di linea di lavoro
pallet
nastri
Esempio di linea di lavoro
pallet
rulli
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri14
Sistemi di m
ovimentazione
Sistemi di m
ovimentazione
Permettono l’esecuzione di m
ovimenti
complessi com
e la rotazione o la traslazionedi un pallet, anche in presenza di bivi o diconvergenze

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri15
Girola
Sensori
Catene di
trasporto
Catene
girola
Vista dall'alto
Traslatore
Catene
traslatore
Sensore
Catene di
trasporto
Catene di
trasporto
Posizionebassa
Catene
traslatorePosizionealta
Vista lateraleVista dall'alto
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri16
Ascensore
Sensori
Catene
ascensore
Vista dall'altoVista laterale
Ascensorecondiviso
piano
terrapiano
rialzato
Ascensore singolo
Ascensore
Sensori
Catene
ascensore
Vista dall'altoVista laterale
Ascensorecondiviso
piano
terrapiano
rialzato
Ascensore singolo

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri17
Ascensore
Sensori
Catene
ascensore
Vista dall'altoVista laterale
Ascensorecondiviso
piano
terrapiano
rialzato
Ascensore singolo
Il centratore
Vista dall'altoVista laterale
prima del centraggio
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri18
Il centratore
Vista dall'altoVista laterale
al termine del centraggio
Convergenza
Sensori
Catene di
trasporto
Vista dall'alto

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri19
Divergenza
Sensori
Catene di
trasporto
Vista dall'alto
Girola doppia per divergenza
Sensori
Catene di
trasporto
Vista dall'altoSensori
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri20
Esempio di linea di lavoro
Il robot industriale

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri21
Il robot industriale
Sistema la cui struttura m
eccanica ècostituita da sequenze di elem
enti meccanici
rigidi (bracci), connessi da giunti, perperm
etterne il moto relativo.
I giunti sono rotatori (movim
ento relativorotatorio) o prism
atici (movim
ento relativotraslatorio)
Il robot industriale
Inoltre, è costituito da:–
attuatori, per imprim
ere movim
ento•
elettrici, idraulici, pneumatici
–sensori, per rilevare lo stato del robot odell’am
biente esterno
–unità di governo, per im
postare (programm
are)e controllare i m
ovimenti e perm
etterne laripetibilità
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri22
I principali utilizzi•
Trasporto e manipolazione (il prodotto non
cambia le proprie caratteristiche fisiche)
–palletizzazione e depalletizzazione
–carico e scarico di m
acchine e magazzini
–confezionam
ento
•A
ssemblaggio (il prodotto perde identità)
I principali utilizzi•
Lavorazione (il prodotto cambia le proprie
caratteristiche fisiche, e il robot manipola
utensili)–
verniciatura–
saldatura–
taglio laser o con getti di acqua
•M
isura–
collaudo dimensionale
–rilevam
ento di profili

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri23
Gradi libertà
•I gradi di libertà di un corpo rigido nellospazio sono 6, corrispondenti ad altrettantepossibilità di m
ovimento (3 traslazioni e 3
rotazioni)
•I gradi di libertà di un robot sono pari alnum
ero dei giunti della sua struttura⇒
coincidono con il numero di param
etri necessari per definire la posizione assunta
Gradi libertà
•U
n robot a 7 gradi di libertà è ridondante,m
a tipicamente nel conto vengono incluse
l’apertura/chiusura delle pinze e lospostam
ento della base mobile.
•Tuttavia, non accade m
ai che base e pinzenon vengono utilizzate in contem
poraneacon gli altri assi, e non servono a definire laposizione della struttura.
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri24
La struttura meccanica
•Struttura portante
•si occupa di posizionare un oggetto nello spazio
•si realizza con giunti rotatori o prism
atici
•polso•
si occupa di orientare un oggetto nello spazio•
si realizza solo con giunti rotatori
•organo term
inale•
esegue la lavorazione tipica del robot
La struttura portante•
I movim
enti della struttura portantedefiniscono lo spazio di lavoro–
bastano 3 giunti (giunti principali)!
•A
seconda della tipologia dei suoi giuntiprincipali si possono classificare i robotindustriali in 5 tipi fondam
entali (di seguito indicati a partire dalla base; P=giunto Prism
atico; R=giunto R
otatorio)
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri25
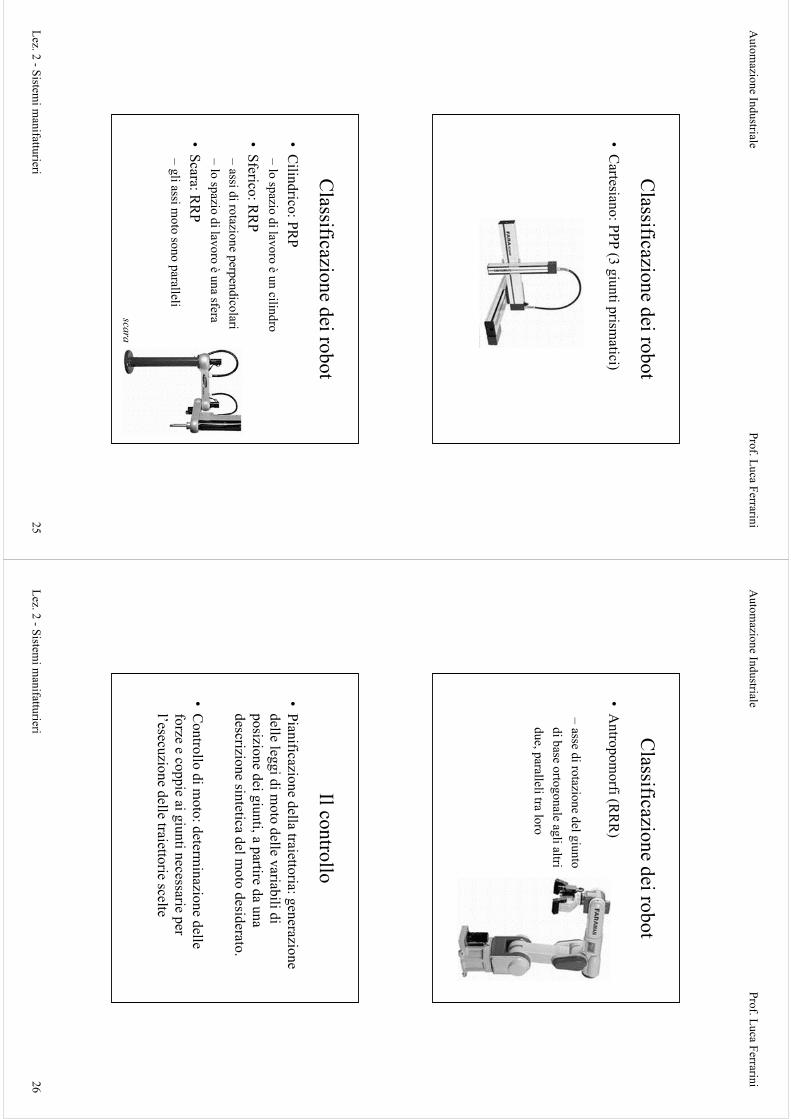
Classificazione dei robot
•C
artesiano: PPP (3 giunti prismatici)
Classificazione dei robot
•C
ilindrico: PRP
–lo spazio di lavoro è un cilindro
•Sferico: R
RP
–assi di rotazione perpendicolari
–lo spazio di lavoro è una sfera
•Scara: R
RP
–gli assi m
oto sono paralleli
scara
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri26
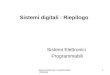
Classificazione dei robot
•A
ntropomorfi (R
RR
)
–asse di rotazione del giunto
di base ortogonale agli altri due, paralleli tra loro
Il controllo•
Pianificazione della traiettoria: generazionedelle leggi di m
oto delle variabili diposizione dei giunti, a partire da unadescrizione sintetica del m
oto desiderato.
•C
ontrollo di moto: determ
inazione delleforze e coppie ai giunti necessarie perl’esecuzione delle traiettorie scelte

Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri27
L’automazione
•O
rganizzazione delle funzioni svolte dalrobot (architettura funzionale) e lorocoordinam
ento con quelle di altri dispositivi
•L’architettura funzionale prevedetipicam
ente 3 livelli gerarchici:–
azioni (apri pinza, vai alla posizione X)
–com
piti (afferra, rilascia, spostati)–
missione (deposita oggetto nell’arm
adio)
Problematiche di autom
azione•
Definizione dei com
piti del robot
•C
oordinamento con altri com
ponenti diim
pianto (macchine operatrici)
•C
ooperazione con altri robot•
“passamano” di prodotti
•lavorazioni a più robot
Autom
azione IndustrialeProf. Luca Ferrarini
Lez. 2 - Sistemi m
anifatturieri28
Esempio di m
anipolatori
Esempio di m
anipolatori















![Pubblicare i beni culturali [ area beni culturali ] Saperi storici e nuove tecnologie Napoli, 18 febbraio 2003 Gianpaolo Mura grafica Isabella Ferrarin](https://img.dokumen.tips/doc/110x75/5542eb5d497959361e8cc368/pubblicare-i-beni-culturali-area-beni-culturali-saperi-storici-e-nuove-tecnologie-napoli-18-febbraio-2003-gianpaolo-mura-grafica-isabella-ferrarin.jpg)












