Embed Size (px)
Citation preview

Human Visual System Neural Network
Stanley Alphonso, Imran Afzal, Anand Phadake, Putta Reddy Shankar, and Charles Tappert

Agenda
• Introduction – make a case for the study– The Visual System– Biological Simulations of the Visual System– Machine Learning and Artificial Neural Networks (ANNs)– ANNs Using Line and/or Edge Detectors– Current Study
• Methodology• Experimental Results• Conclusions• Future Work

Introduction - The Visual System
• The Visual System Pathway– Eye, optic nerve, lateral geniculate nucleus, visual cortex
• Hubel and Wiesel– 1981 Nobel Prize for work in early 1960s– Cat’s visual cortex
• cats anesthetized, eyes open with controlling muscles paralyzed to fix the stare in a specific direction
• thin microelectrodes measure activity in individual cells• cells specifically sensitive to line of light at specific orientation
– Key discovery – line and edge detectors

Introduction - Computational NeuroscienceBiological Simulations of the Visual System
• Hubel-Wiesel discoveries instrumental in the creation of what is now called computational neuroscience
• Which studies brain function in terms of information processing properties of structures that make up the nervous system
• Creates biologically detailed models of the brain• 18 November 2009 – IBM announced they created
the largest brain simulation to date on the Blue Gene supercomputer – millions of neurons and billions of synapses exceeding those in the cat’s brain

Introduction – Artificial Neural Networks (ANNs)
• Machine learning scientists have taken a different approach using simpler neural network models called ANNs
• Commonest type used in pattern recognition is a feedforward ANN
• Typically consists of 3 layers of neurons– Input layer– Hidden layer– Output layer

Introduction – Simple Feedforward Artificial Neural Network (ANN)

Introduction - Literature review ofANNs using line/edge detectors
• GIS images/maps – line and edge detectors in four orientations – 0°, 45°, 90°, and 135°
• Synthetic Aperture Radar (SAR) images – line detectors constructed from edge detectors
• Line detection can be done using edge techniques such as Sobel, Prewitt, Laplacian Gaussian, Zero Crossing and Canny edge detector

Introduction - Current Study
• Use ANNs to simulate line and edge detectors known to exist in the human visual cortex
• Construct two feedforward ANNs – one with line detectors and one without – and compare their accuracy and efficiency on a character recognition task
• Demonstrate superior performance using pre-wired line and edge detectors

Methodology
• Character recognition task - classify straight line uppercase alphabetic characters
• Experiment 1 – ANN without line detectors
• Experiment 2 – ANN with line detectors
• Compare – Recognition accuracy – Efficiency – training time

Alphabetic Input PatternsSix Straight Line Characters
(5 x 7 bit patterns)
***** ***** * * * * ***** * * * * * * * * * * * * * * **** **** ***** * * * * * * * * * * * * * * * * * ***** * * * * ***** *

Experiment 1 - ANN without line detectors

Experiment 1 - ANN without line detectors
• Alphabet character can be placed in any position inside the 20x20 retina not adjacent to an edge – 168 (12*14) possible positions
• Training – choose 40 random non-identical positions for each of the 6 characters (~25% of patterns)– Total of 240 (40 x 6) input patterns– Cycle through the sequence E, F, H, I, L, T forty times for
one pass (epoch) of the 240 patterns
• Testing – choose another 40 random non-identical positions for each character for total 240

Input patterns on the retina E(2,2) and E(12,5)
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0

Experiment 2 - ANN with line detectors

Simple horizontal and verticalline detectors
Horizontal Vertical
+
--- -+-
+++++ -+-
--- -+-
+
288 horizontal and 288 vertical line detectors for a total of 576 simple line detectors

24 complex vertical line detectors and their feeding 12 simple line detectors
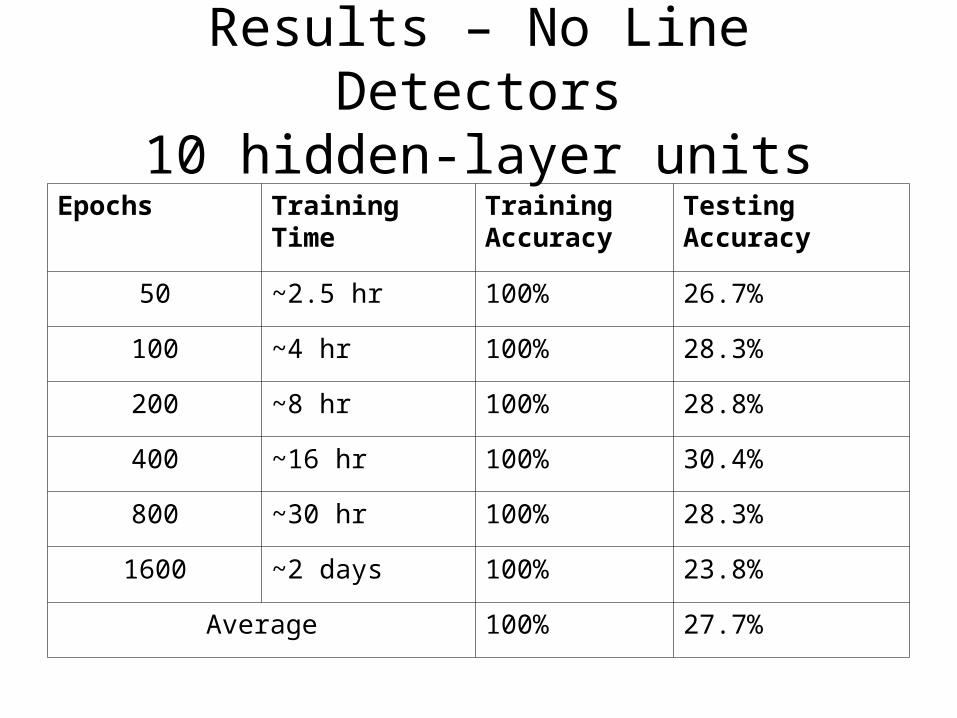
Results – No Line Detectors10 hidden-layer units
Epochs TrainingTime
TrainingAccuracy
TestingAccuracy
50 ~2.5 hr 100% 26.7%
100 ~4 hr 100% 28.3%
200 ~8 hr 100% 28.8%
400 ~16 hr 100% 30.4%
800 ~30 hr 100% 28.3%
1600 ~2 days 100% 23.8%
Average 100% 27.7%

Results – Line Detectors 10 hidden-layer units
Epochs TrainingTime
TrainingAccuracy
TestingAccuracy
50 0:37 min 47.5% 37.5%
100 0:26 min 100.0% 63.3%
200 0:51 min 100.0% 68.8%
400 2:28 min 71.3% 50.8%
800 3:37 min 100.0% 67.9%
1600 8:42 min 95.8% 56.7%
Average 85.8% 57.5%

Line Detector Results50 hidden-layer units
Epochs Set/ Attained
TrainingTime
TrainingAccuracy
TestingAccuracy
50/8 41 sec 100% 70.0%
100/9 45 sec 100% 69.8%
200/10 48 sec 100% 71.9%
400/10 49 sec 100% 77.1%
800/8 41 sec 100% 72.5%
1600/9 45 sec 100% 71.3%
Average 100% 72.1%

Confusion Matrix Overall Accuracy of 77.1% OutIn
E F H I L T
E 62.5 20 0 0 5 12.5
F 12.5 80 0 0 2.5 5
H 0 7.5 85 0 7.5 0
I 0 5 0 95 0 0
L 0 15 2.5 5 72.5 5
T 2.5 20 0 10 0 67.5

Conclusion - Efficiency
• ANN with line detectors resulted in a significantly more efficient network– training time decreased by several orders
of magnitude

Conclusion - Recognition Accuracy
0
10
20
30
40
50
60
70
80
90
100
No line detectors 10 hidden units
Line detectors 10 hidden units
Line detectors 50 hidden units

Conclusion – EfficiencyCompare Fixed/Variable Weights
Experiment Fixed Weights
Variable Weights
Total Weights
1 No Line Detectors 0 20,300 20,300
2 Line Detectors 6,912 2,700 9,612

Conclusion
• The strength of the study was its simplicity
• The weakness was also it simplicity and that the line detectors appear to be designed specifically for the patterns to be classified
• Weakness can be corrected in future work

Future WorkOther alphabetic input patterns
* **** *** * * * * * * * * * * * * * **** * ***** * * * * * * * * * * * **** ***

Simple horizontal and verticaledge detectors
--- +++
+++ ---
-+ +-
-+ +-
-+ +-

Questions





























