-
8/3/2019 Huang Benson Final Report
1/30
1
EECE 496 Project Final Report
Mixing Shadows into Video Imagery
Student: Benson Huang
85172013
Supervisor: Dr. Sidney Fels, Changsong Shen
-
8/3/2019 Huang Benson Final Report
2/30
2
ABSTRACT
The Human Communication Technologies Laboratory is building an
ongoing project
called Mixing Shadows into Video Imagery. The project captures
silhouettes of
moving objects which will be positioned on previously recorded
backgrounds to produce
an interactive video artwork. Human tracking systems are popular
research topics in
computer vision industries. The project will be required to
develop a certain kind of
motion tracking software as one of its step toward the final
goal. Currently, the project
has not yet completed the step that captures the moving objects.
The development for
this step will be the focus in the paper.
-
8/3/2019 Huang Benson Final Report
3/30
3
TABLE OF CONTENTS
ABSTRACT........................................................................................................................
2TABLE OF
CONTENTS....................................................................................................
3
LIST OF
ILLUSTRATIONS..............................................................................................
4
1 -
INTRODUCTION.........................................................................................................
5
2 - EQUIPMENT AND METHODOLOGY
......................................................................
7
2.1 Canon powershot
A70...............................................................................................
7
2.2 Blaze Media
Pro........................................................................................................
8
2.3 Matlab
.......................................................................................................................
9
2.4
Assumptions............................................................................................................
11
2.5
Algorithm/Approach...............................................................................................
11
3 - DESIGNS AND EXPERIMENTS
..............................................................................
14
3.1 System
Overview....................................................................................................
14
3.2 Foreground Extraction
............................................................................................
15
3.2.1 Gaussian Model
...............................................................................................
16
3.2.2 Background
Subtraction...................................................................................
17
3.3 Noise
Filter..............................................................................................................
18
3.3.1 Dilate/Erode
.....................................................................................................
19
3.3.2 Edge
Rounding.................................................................................................
22
4 RESULTS
...................................................................................................................
24
4.1 Difficulties
..............................................................................................................
26
4.2 Future
Development................................................................................................
27
5
CONCLUSION...........................................................................................................
28
REFERENCES
.................................................................................................................
30
-
8/3/2019 Huang Benson Final Report
4/30
4
LIST OF ILLUSTRATIONS
Figure 1 System Overview
Diagram..............................................................................
15
Figure 2 Background Model
..........................................................................................
17
Figure 3 Subtracted
Frame.............................................................................................
18
Figure 4 Morphological operation 1
..............................................................................
20
Figure 5 Morphological operation 2
..............................................................................
21
Figure 6 Morphological operation 3
..............................................................................
21
Figure 7 Comparison of Input /
Output..........................................................................
23
Figure 8 Example of background problem
....................................................................
25
-
8/3/2019 Huang Benson Final Report
5/30
5
1 - INTRODUCTION
This project investigates the working of a foreground
segmentation algorithm that will be
used to extract moving foreground objects from a video. The
video will be shot with a
standard digital camera in a controlled environment. The
resulting video from the
extraction process will contain a silhouette that tracks the
foreground objects
movements. The objectives for the project are to research a
practical algorithm,
implement the algorithm, and finally, apply filtering techniques
to the extracted
foreground to reduce the noises remaining from the segmentation.
This extraction
process is part of a larger project that will be used as an
interactive display. The entire
project will combine silhouettes of moving objects and
pre-recorded background
imageries to create a video artwork. There are a few research
papers written for different
segmentation approaches and algorithms; however, most algorithms
are still not able to
achieve a fully noiseless extraction due to lighting and
modeling complications.
Different segmentation algorithms are still actively being
researched and tested. There
was an attempt at building a real-time extraction project by a
previous EECE 496 student.
The resulting video frames were noisy and the time constraint of
the student did not allow
him to implement a better filtering technique. Unlike the
project by the previous student,
the new extraction algorithm will not have to run in real-time;
therefore, I will start the
project from the beginning. The newly built segmentation process
will be able to extract
foreground objects; also, the accuracy of the process should
improve from the previous
work. The report will be divided into three major sections.
First, the equipment and
software used will be discussed and it will be followed by the
analysis of the systems
-
8/3/2019 Huang Benson Final Report
6/30
6
design. The performance of the process and the problems faced
during the work of the
project will be covered last.
-
8/3/2019 Huang Benson Final Report
7/30
7
2 - EQUIPMENT AND METHODOLOGY
The equipments used for the project include a digital camera,
video editing and
compressing software, and a processing tool that will perform
the extraction process. The
digital camera will be used to take videos of moving foreground
objects. Then, the video
editing software will compress the video in order for the
processing tool to recognize the
file format. Lastly, the processing tool will output a video
that will show only the
shadow of foreground objects. Assumptions for the project may
alter the decision for
choosing the practical extraction algorithm. There are many
different techniques that can
extract foregrounds from videos. This project will use a
statistical approach that can be
applied to videos with random moving objects in the
foreground.
2.1 CANON POWERSHOT A70
The video camera that was used for this project was the Canon
PowerShot A70. It is a
general purpose digital camera that takes both pictures and
photographs. This lower-end
camera has most functions that a normal digital camera has. The
camera can record
videos at three different pixel resolutions: 640 by 480, 320 by
240, and 160 by 120. At
default, the video will be recorded at 15 frame per second (FPS)
and 320 by 240 pixels.
The video along with the sound are saved as Audio & Video
Interleaved (AVI) files with
the M-JPEG codec.
-
8/3/2019 Huang Benson Final Report
8/30
8
This video camera was used because it is always available.
Multiple sessions of filming
was made in order to produce a video that was most suitable for
the extraction algorithm.
Therefore, a camera that is both mobile and accessible is
needed. The usage of the
camera is very basic. Like all other digital cameras, the A70
will first need to set its
functional mode to movie. After adjusting the resolution and
zoom-in/zoom-out
settings, the camera will be able to start filming the
video.
The only problem that occurred with the digital camera was that
the AVI file downloaded
from the memory card could not be read straight by Matlab, the
image processing tool.
The problem was easily solved by using video editing software to
convert the file so that
Matlab will be able to process the video.
2.2 BLAZE MEDIA PRO
This project uses the video editing software, Blaze Media Pro.
The official website for
the software can be found at www.blazemp.com. This audio and
video editing software
has features such as AVI converter, audio editor, and movie
editor etc. Even though the
software has an extensive list of powerful features, only the
AVI converter will be used.
Not only does the Blaze Media Pro meet all the needs that the
project requires, it is also
very easy to operate. After starting the video editing program,
there are many audio and
video editing features available. For the project, we would only
need to use the Convert
http://www.blazemp.com/http://www.blazemp.com/
-
8/3/2019 Huang Benson Final Report
9/30
9
Video feature. The converting tool allows the user to change the
output videos frame
rate, codec, and picture resolution. Usually, a frame rate of 10
FPS is preferred due to the
large sizes of videos. A video with 200 frames takes the
extracting algorithm about 10
minutes to complete; therefore, the minimal 10 FPS is desired.
Furthermore, the Indeo
5.1 codec is used as the video encoder for the project. The only
reason for this selection
is because Matlab can read the Indeo 5.1 encoding. Lastly, the
software can also change
the frame resolution of the video. At default, the Canon A70s
video files have a frame
size of 320 by 240, a four to three ratio. If the video file has
a frame size of 640 by 480,
the software can decrease the resolution so the foreground
separation process would not
take too long. One thing to consider is that the ratio to cut
down by would have to match
the original videos height to width ratio. The most important
feature that this editing
software provides is that it can take out the audio from the AVI
file. This is required
since the extraction algorithm only expects image data. The
output video should be the
same as the original video except that there will be no audio.
The video quality may
decrease due to editing options like frame rate and
resolution.
2.3 MATLAB
For the project, I chose to use Matlab as the programming
language. It is a high-level
language that specializes in data analysis and computing
mathematical problems.
Matlabs official website can be found at www.mathworks.com. The
program
http://www.mathworks.com/http://www.mathworks.com/http://www.mathworks.com/
-
8/3/2019 Huang Benson Final Report
10/30
10
environment has an interactive command window that allows users
to test and experiment
with the code line by line. Users can also save their codes into
an M-file and run the
program. The Matlab Help Navigator is also very useful. It
properly categorizes and
provides detailed explanations and sample usages of all
functions. Just like C++ and
Java, the language syntax provides loops and condition
statements for programming
purposes.
The language was chosen over C++ and Java because there are a
lot of built-in functions
that are specific for image processing. As well, the compiler
can compute large
mathematical equations faster than other languages. These
advantages suit the project
perfectly due to the large matrix computations required during
the extraction process.
There were some minor problems that occurred during the working
of the project. The
first problem was that Matlab is a complete new language and
environment for me. I had
to get myself familiarized with Matlab by practicing simple
tutorials and exploring with
the programming environment. Another problem that arose is that
Matlab takes a long
time running the segmentation code. When compared to C++ and
Java, Matlab can
calculate matrices quicker, but the large video files take a
long time for a scripting
language to compile. Lastly, the Matlab software environment
requires a lot of memory
to run. During the process of starting up and compiling, windows
often cannot provide
enough memory for Matlab and windows will sometimes shutdown
automatically.
-
8/3/2019 Huang Benson Final Report
11/30
11
2.4 ASSUMPTIONS
Assumptions play a major role in this project due to the
randomness of events that may
occur. There are a couple assumptions relative to the background
environment of the
video. The first assumption allows the user to choose the
location of the video. It can be
filmed either indoor or outdoor. Secondly, lighting in the video
must always be constant
due to the difficulty that arises when a light source changes
its brightness or location.
Also, the background of the video must be static. No moving
objects are allowed in the
background. Even slight movement such as a reflection off of a
window can create
unwanted noises. Lastly, the software process is not required to
run at real-time. This
assumption greatly reduces the complexity of the software.
2.5 ALGORITHM/APPROACH
The study of human motion capture in the field of computer
science is still being actively
researched. Even though there are numerous papers written about
different methods to
capture the human motion, a practical method is still yet in
place. For this project, a
foreground is defined as an object that moves; therefore, human
motion capturing
methods can be applied to the project.
In the field of human motion capturing, different applications
often requires different
constraints. Many human tracking uses active sensing to locate
the joints or features of
-
8/3/2019 Huang Benson Final Report
12/30
12
the human body. However, the project requirement does not allow
the placing of signal
transmitters on the foreground objects so passive sensing will
be used. Moreover, due to
the fact that the project does not only concern with the
tracking of human body, the
building of a human model will be avoided.
One of the segmentation algorithms that was considered is the
use of simple thresholding.
Thresholding will measure the foreground objects color or
intensity value and compare it
with the background. If the color intensity of the pixel is
different from its neighboring
pixels, the original pixel will be treated as the foreground.
The one drawback to this
approach is that it requires the foreground object to have a
significant difference in the
surface color than the background [1]. This approach will not
work because it relies
heavily on the foreground and the backgrounds difference in
color.
The extraction algorithm that will be used for this project is
based on a statistical
approach. This approach is very similar to the background
subtraction method.
Background subtraction takes each frame in the video and
subtracts it from a static
background that is known prior to the extraction process.
Instead, this approach will
calculate the mean and variance of the color intensity of each
pixel and build a
background image from the calculations. After obtaining the
background, each frame in
the video will be subtracted from the background and a
silhouette will be formed. The
reason this approach was chosen is because of its practicality
and suitability. Background
subtraction algorithms are generally less complicated than other
methods [1]. Even
-
8/3/2019 Huang Benson Final Report
13/30
13
though human models will generate significantly less errors, it
does not satisfy as a
general foreground object.
-
8/3/2019 Huang Benson Final Report
14/30
14
3 - DESIGNS AND EXPERIMENTS
The entire project consists of two steps. The first step will
require the user to manually
prepare a valid video for foreground extraction. The equipments
and video editing
software used in this step is not limited to only the equipments
mentioned in this report.
This step will not be discussed in this section since it is not
part of the actual system
design. The next step will be execution of the software system
which will consist of two
main phases. The first phase will implement the extraction
algorithm that was discussed
previously. The second phase will take the result of the
previous phase and reduce as
much noise as possible. This section will focus on the entire
systems flow and the
techniques that were utilized during the extraction and
filtering phases.
3.1 SYSTEM OVERVIEW
The overall system consists of two phases, an extraction phase
and a filtering phase. The
purpose of the extraction phase is to execute the foreground
extraction algorithm on the
given the video file. The extraction phase will receive a valid
video as input. The images
will first be processed to create a Gaussian Model of the
background. Then the
background model will be subtracted from each frame to generate
an unfiltered
silhouette. The second phase will filter the images to reduce
any unwanted noises using
closing, opening and edging techniques. The final product will
be a video that has a
-
8/3/2019 Huang Benson Final Report
15/30
15
shadow which tracks the foreground objects motion from the
original video. Below is a
diagram that shows the flow of the overall system.
Figure 1 System Overview Diagram
3.2 FOREGROUND EXTRACTION
The first phases main purpose is to process the video and
perform background
subtraction on every frame. First a statistical based Gaussian
model is made. This model
will be used as the reference for every frame when executing
background subtraction.
The output of the phase will contain sequence of images that
requires further filtering
process.
-
8/3/2019 Huang Benson Final Report
16/30
16
3.2.1 Gaussian Model
The first step in developing a foreground extraction software is
to build a model of the
background. Since there are no preset background images to use,
the software will have
to generate a model automatically. Using the statistical
approach, the software will build
a Gaussian Model. A Gaussian Model calculates each pixel-value
from all the sample
pixels mean and variance. The model will set a lower bound and
an upper bound that
will eliminate pixels that are outside of the norm. If a video
is to run for an extended
period of time, the pixels average will equal to the backgrounds
value unless the
foreground object stays static.
On the Matlabs official website, www.mathworks.com, I was able
to find a
downloadable software package that creates a Gaussian Model from
a video. The code
works with Hue, Saturation, Value (HSV) color space instead of
the Red, Green, Blue
(RGB) color space since HSV can minimize the effect that shadow
have on images.
After loading the video into the software package, a background
can be calculated. (See
Figure 2)
http://www.mathworks.com/http://www.mathworks.com/
-
8/3/2019 Huang Benson Final Report
17/30
17
Figure 2 Background Model
3.2.2 Background Subtraction
The background subtraction is very straight forward. This step
takes every frame from
the video and subtracts it by the Gaussian Model that was
calculated in the previous step.
The resulting frame shows a general shape of where the
foreground objects locate,
however, the frame is very noisy due to the imperfection of the
subtraction method. See
Figure 3.
-
8/3/2019 Huang Benson Final Report
18/30
18
Figure 3 Subtracted Frame
There was one problem that was faced during this step. The
Matlab software occupies
too much memory and often the process would have to be stopped
short. Instead of
saving the pixel data into one large variable, the program now
reads each frame
individually during each subtraction and deletes the temporary
frames immediately after
each loop.
3.3 NOISE FILTER
This phase receives a rough sketch of the shadow from the
extraction phase and performs
filtering techniques to eliminate remaining noises. First
technique that will be applied is
the traditional morphological techniques. Then an edge rounding
technique will be
applied to smooth out the edges of the figure.
-
8/3/2019 Huang Benson Final Report
19/30
19
Before executing any filtering techniques, the program will need
to label each pixel as
either a foreground or background pixel. A technique that will
help solve this problem is
thresholding. Pixel deviation values that are higher than the
threshold value will be
allowed to pass through and set the pixels status as foreground.
The lower the threshold,
more noises will appear since more pixels will pass as
foreground objects. However,
threshold value can not be set too high either because important
data will be lost. After
passing through the threshold, the frame will now be a binary
image that either contains a
0 (background) or 1 (foreground).
3.3.1 Dilate/Erode
In the field of image processing, most people use morphological
operations to clean up
noises after the subtraction process. Using techniques like
dilation and erosion are very
standard operations. Dilation is the expansion of the foreground
whereas erosion is the
contraction of the foreground. For every pixel, both techniques
check its neighbors for
other foreground pixels within a specified radius. If a
foreground pixel is detected,
dilation would mark its current pixel as a foreground and
erosion would perform the
opposite way. Furthermore, when dilation is followed by erosion,
the technique is called
closing and it will fill up any unwanted holes inside an
enclosed foreground area. In
addition, when erosion is followed by dilation, the technique is
called opening and it will
eliminate noises that are present in the background. Choosing
the radius size is very
important because if the radius is too small, some of the
misplaced pixels would not get
-
8/3/2019 Huang Benson Final Report
20/30
20
removed and if the radius is too large, certain important
foreground features would be
missing. The technique of closing works closely with the idea of
threshold. If the
threshold is set at very high value, fewer foreground pixels
will pass through which
results in losing some of the foreground data. This can be
compensated by choosing a
wider radius during the closing operation to reform some of the
lost figure [2].
For this project, the closing and opening operations were
applied to the images. Matlab
has built-in functions imclose and imopen. Both functions can
select the radius size,
as well as the shapes in which they search for foreground
pixels. Usually, a standard
shape like a disk of radius 1 is used for both opening and
closing. Through testing, I
found the combination that eliminates the most noise is using a
square of radius 1 for
closing, and a disk of radius 2 for opening. The comparison
below shows much better
results using two different types of shape for closing and
opening.
Figure 4 Morphological operation 1
-
8/3/2019 Huang Benson Final Report
21/30
21
Figure 4 uses a square shape of radius 1 for closing and a disk
shape of radius 2 for
opening. For this particular frame, there is minimum noise
present.
Figure 5 Morphological operation 2
Figure 5 uses a disk shape of radius 1 for both the closing and
opening operations. It is
very clear that the image have considerably more errors than the
Figure 5.
Figure 6 Morphological operation 3
-
8/3/2019 Huang Benson Final Report
22/30
22
Figure 6 uses a disk shape of radius 1 for closing and a disk
shape of radius 3 for
opening. The closing operations parameters are the same as
Figure 5, however, due to
the increase of radius during the opening operation, Figure 6
has considerably less noise
on the background. If compared closely, there are some
noticeable details surrounding
the foreground figure that Figure 6 does not capture.
3.3.2 Edge Rounding
Another technique that will be included in the filtering process
is edge rounding. After
applying morphological operations on the silhouette, the figure
boundary seems to look
rugged. With edge rounding, it will smoothen out the edges to
form a softer looking
figure. For this project, it uses Canny edge detection to draw
out the figures shape.
Canny edge detectors are really popular in image processing
developments due to its
simplicity and effectiveness. Usually it detects the edges of a
colored image by
comparing the gradient values of pixels with neighbors [3]. In
this project, it will be used
to smoothen out a binary image in order to clean up the
morphological operations.
First the filtered images will be processed using the Canny edge
detection and another set
of images with traced edges will be produced. Next the filtered
frame will be added with
the edges in order to fill up the body of the silhouette. An
attempt was made to fill out
the edges but the uncertainty of the foreground objects made
filling the edges really
difficult. After the edge rounding operation, each frame will be
packaged into the output
-
8/3/2019 Huang Benson Final Report
23/30
23
product. Below is a comparison of the before and after of a
frame entering this entire
extraction process.
Figure 7 Comparison of Input / Output
-
8/3/2019 Huang Benson Final Report
24/30
24
4 RESULTS
The resulting video from the background subtraction meets most
of the expectations from
the project. The objective requires the extraction algorithm to
accurately track the motion
and the figure of any foreground objects. The extraction process
does produce a well
defined figure of the foreground objects. It also can track any
shape of multiple moving
objects in the scene. However, the objective also requires the
foreground objects to be
tracked as accurately as possible. After processing the video,
there are some minor
noises present within certain frames. The filtering process did
not completely remove all
the misinterpreted pixels; therefore, a perfect noiseless frame
was not attained.
Due to the fact that the algorithm uses a statistical model of
the background to execute
the extraction, the environment becomes vital in making an
errorless silhouette. The
video samples that were used to test the algorithm have a
variety of background colors,
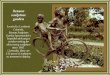
intensity, and surfaces. After analyzing samples of the video
output, there seem to be a
common trend of the frames environment when the object
disfigures. Extreme color
intensity values from the background often distort the
foreground objects. For example,
some of the sample videos have a both the light color such as a
sky and a dark color such
as a tree bush as its background. (See Figure 8)
-
8/3/2019 Huang Benson Final Report
25/30
25
Figure 8 Example of background problem
When a foreground object over laps and covers the background
spot that has a significant
lighting difference, the silhouette becomes very noisy and
starts to deform.
For this project, we were given the luxury of specifying the
background environment.
Through experiment, I found a couple preferred conditions of the
surroundings that work
well with the algorithm. Most importantly, an evenly spread
light source is preferred. If
a strong and focused light source was present in the video, not
only would the shadow
create accuracy problems, extreme changes in lighting intensity
would also create noises
in unexpected areas. In addition, a background with similar
color and intensity values
would also help to distinct the foreground object more
precisely. Within these
conditions, the foreground extraction process proves to have
much less noises.
-
8/3/2019 Huang Benson Final Report
26/30
26
4.1 DIFFICULTIES
There were a couple problems that occurred during the
development of the project. The
first problem that took place was the lack of memory on the
computer. Running the
Matlab software takes a lot of resources from the memory. Using
the Matlab software,
the project reads a video file and processes every frame of the
video. Assuming the video
is running at 10 FPS, a twenty second video will have two
hundred frames that are 320 by
240 pixels. Each of the pixels are needed to calculate the
Gaussian Model, and later used
for extraction. All these tasks are being saved in cache. If a
video with more than one
hundred and fifty frames, Matlab will give an error stating that
there was insufficient
memory to process all the data. This problem was solved by
skipping every nth frame
when creating the Gaussian Model. The resulting background model
is almost identical
to the model that uses every frame even if only every fourth
frame is considered for
background calculation. The results are similar because the
objects movements are still
tracked at a high pace. Additionally, during the execution of
the frame differencing, the
software will only utilize one frame at a time to reduce storage
of the same frame into
memory twice.
Another problem that was presented was the filling of the
disfigured shadows. During
noisy frames, figures often break apart and have holes within
the body. An attempt was
made to fill in the holes of the body; however, it was not
successful. Since there are a lot
of random movements that the human body is capable of, labeling
a gap as an error or an
actual gap of the picture is very difficult. For example, when a
person crosses his arm
-
8/3/2019 Huang Benson Final Report
27/30
27
against his waist, a gap is created in between the arm and the
body. In this case, it is not
easy to figure out which holes to fill.
4.2 FUTURE DEVELOPMENT
There are still lots of improvement to be made for the project
before becoming a
complete product. Numerous effective filtering techniques were
not used in this project
such as size filtering. Size filtering will remove the small
noises that illuminate once in a
while. This technique calculates the size of an enclosed area
and removes it from the
frame if it is under a certain threshold; there is however a
drawback to this type of
filtering. If a small part of the foreground object is separated
from the main body due to
certain background obstacles, the smaller part will risk being
deleted if the threshold
value was not set accordingly.
Modeling is another technique that will help enhance the shadow
video to become more
accurate. There are a lot of research papers that discuss about
matching the human model
with the body motion from the video. Building a 3D human model
is a lot of work due to
the complexity of our human body. Development of the human model
would be a good
project for any future EECE 496 students.
-
8/3/2019 Huang Benson Final Report
28/30
28
5 CONCLUSION
The report discussed the design and test results of a
statistical extraction algorithm used
for video foreground segmentation. The goal is to develop a
software package that
processes a video and outputs a shadow that accurately tracks
the shapes and motions of
any foreground objects. The project successfully achieved the
tracking of multiple
foreground figures; however, noiseless extraction was not
accomplished.
With the given constraints and assumptions for this project,
choosing a suitable algorithm
becomes very important. A statistical approach was chosen to
implement this extraction
software because it is practical in most areas of concern. The
entire project includes the
set up of the sample video that requires foreground extraction
as well as the actual
program implementation. The software package was programmed in
Matlab due to its
capabilities in graphic processing. The entire system consists
of two phases, an
extraction phase and a filtering phase. The extraction phase is
responsible for subtracting
each video frame with a reference background model. The result
will be passed to the
next phase for further processing. The filtering phase will take
the subtracted images and
apply morphological operations to create a shadow figure.
Lastly, Canny edging
technique help finalizes the figure to obtain a smoothened
silhouette.
The resulting video has met most of the objectives except the
accuracy of the shadow
video. Within certain frames, there were often noises that were
caused by an extreme
difference in the background models color intensity. This
problem will leave future
-
8/3/2019 Huang Benson Final Report
29/30
29
work on the project with great possibilities. Size filtering is
definitely worth researching
about since it will help reduce unsuspected noises. Future
students can implement or add
on even better filtering techniques to approach even closer to
the final product.
-
8/3/2019 Huang Benson Final Report
30/30
REFERENCES
[1] Thomas B. Moeslund and Erik Granum, A Survey of Computer
Vision-Based
Human Motion Capture, Laboratory of Computer Vision and Media
Technology,
Aalborg University, Denmark
[2] Nicholas R. Howe and Amanda Deschamps, Better Foreground
Segmentation
Through Graph Cuts, Smith College, 2004,
http://maven.smith.edu/~nhowe/research/code/
[3] Lijun Ding and Ardeshir Goshtasby, On the Canny edge
detector, Pattern
Recognition, vol. 34, pp. 721-725, 2001
[4] Chris Stauffer and W.E.L Grimson, Adaptive background
mixture models for real-
time tracking, Massachusetts Institute of Technology, Cambridge,
MA
[5] David Lowe, Introduction to Matlab for Computer Vision,
2004,
http://www.cs.ubc.ca/~lowe/425/matlab.html
[6]
http://www.mathworks.com/access/helpdesk/help/helpdesk.html
http://maven.smith.edu/~nhowe/research/code/http://www.cs.ubc.ca/~lowe/425/matlab.htmlhttp://www.mathworks.com/access/helpdesk/help/helpdesk.htmlhttp://www.mathworks.com/access/helpdesk/help/helpdesk.htmlhttp://www.cs.ubc.ca/~lowe/425/matlab.htmlhttp://maven.smith.edu/~nhowe/research/code/