Embed Size (px)
Citation preview

How We Sense Objects and Energy
Sensing Body Movement• Combined signals
▫CNS receives information from the various human senses simultaneously
• Vestibulum▫Part of the inner ear that provides information
about posture, body movement and balance▫Three semicircular canals
Each canal is at a right angle to the other Membranous semicircular ducts within the
canals; each contains endolymph and connects with the utricle
Each canal enlarges into an ampulla near junction with utricle


Sensing Body Movement•Sense of balance
▫ Static equilibrium: ability to sense head position relative to gravity or acceleration/deceleration Movements of the maculae, located in both the utricle
and saccule, provide information related to head position or acceleration
Otoliths are located within the matrix of the macula Changing head position produces a change of pressure
on the otolith-weighted matrix, stimulating the hair cells that stimulate the receptors of the vestibular nerve
Vestibular nerve fibers conduct impulses to the brain and sense head position and a change in the pull of gravity


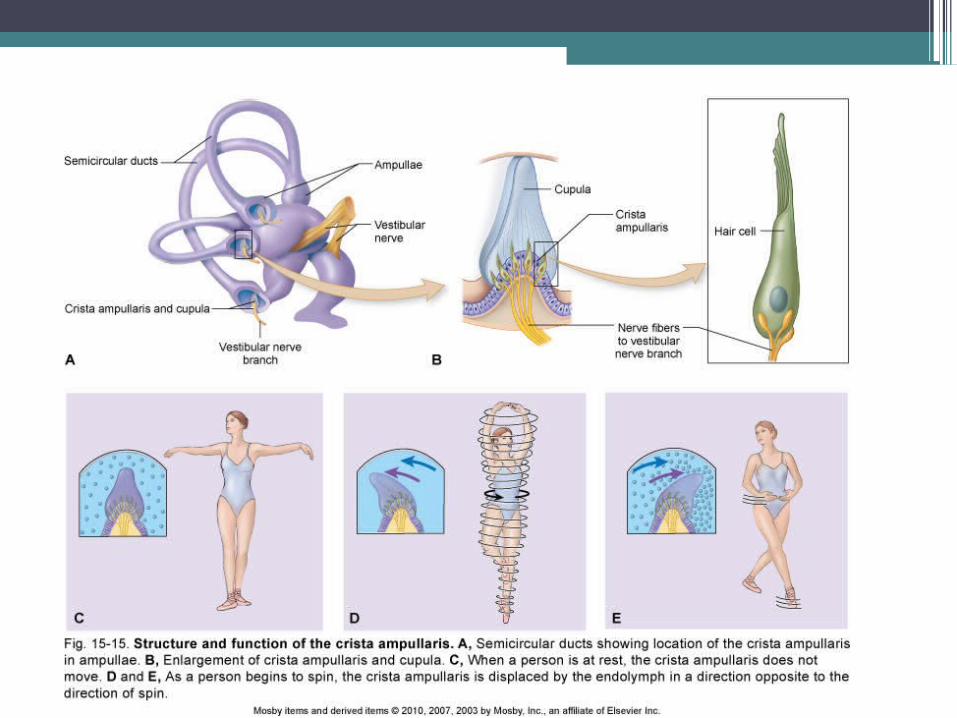
Sensing Body Movement▫ Dynamic equilibrium: needed to maintain balance
when the head or body is rotated or suddenly moved; able to detect changes in direction and rate at which movement occurs Depends on the functioning of the cristae
ampullaris, located in the ampulla of each semicircular duct
Cupula: gelatinous cap where the hair cells of cristae are embedded Does not respond to gravity Moves with the flow of endolymph in the semicircular
ducts Hair cells bend as cupula moves, producing a
receptor potential followed by an action potential Action potential passes through the vestibular portion
of the eighth cranial nerve to the medulla oblongata Sent next to other areas of the brain and spinal cord for
interpretation, integration, and response

Sensing Body Movement• Sense of body balance
▫Brain must take information received from the cristae ampullaris and macula as well as many other body sensors and integrate
▫Several vestibular illusions Motion sickness When the body is aligned with the gravitational
vector, it does not sense right/left movement Illusionary tilt is the interpretation of linear
acceleration as body tilt Elevator illusions occur when a gravitational pull
produces an apparent rise or fall of seen objects A person lying down may have the illusion of
inversion

The Feel of Objects, Energy and Pain•4 groups of sensory skin receptors
1. Mechanoreceptors – touch, tickle, pressure2. Thermoreceptors – hot and cold3. Electroreceptors – electrical stimulation4. Nociceptors – sense pain
•Taction▫ Sense relating to skin contact▫ Tactile sensation – solely skin sensation▫ Haptic sensation – information
simultaneously from the skin and kinesthetic sensors

The Feel of Objects, Energy and Pain• Tactile sensors
▫ Free nerve endings Most widely distributed type of sensory receptor Sensations mediated include itching, tickling,
touch, movement, and mechanical stretching Primary receptors for heat and cold Nociceptors
are primary receptors for pain Root hair plexuses
Weblike arrangements of free nerve endings around hair follicles
Merkel discs Mediate sensations of discriminative touch

The Feel of Objects, Energy and Pain• Tactile sensors
▫ Meissner’s corpuscle (tactile corpuscle)—relatively large and superficial in placement; mediate touch and low-frequency vibration; large numbers in hairless skin areas such as nipples, fingertips, and lips Two anatomical variations of Meissner’s corpuscle:
Krause’s end bulbs—small, very sensitive to cold Ruffini’s corpuscles‚ have a flattened capsule and are
deeply located in the dermis; mediate crude and persistent touch
▫ Pacinian corpuscles—large mechanoreceptors that respond quickly to sensations of deep pressure, high-frequency vibration, and stretch; found in deep dermis and in joint capsules, palms and fingertips


The Feel of Objects, Energy and Pain• Temperature
▫ Relative and adaptive▫ Skin temperature = physiological zero▫ Slowly warming or cooling may not elicit a change in
sensation▫ Physiologic zero may differ among body parts
• Feeling cold or warm▫ Some receptors respond to hot, others to cold▫ The two scales may overlap, providing paradoxical
information▫ Sense temperature changes to warmth more easily▫ Warm sensations adapt more easily except at very
high temperatures▫ Rapid cooling can cause an “overshoot phenomenon”

The Feel of Objects, Energy and Pain•Sensing electricity
▫there are no known receptors in our skin▫Electricity can arouse almost any sensory
channel of the PNS▫Threshold depends on individual as well as
location, rate, intensity and type of electrode used Usually 0.5-2 mA if pulse lasts 1ms

The Feel of Objects, Energy and Pain•Pain
▫Nociceptors sense pain because they possess special molecules for detecting pain-causing stimuli
▫Sharp pain – surface, head, toothache▫Dull pain – deep in the body▫Pain threshold
Variable because hard to separate from sensory and emotions
Pain adaptation Secondary pain Referred pain Phantom pain

Designing for Tactile Perception•Research Needs
1. Stimuli are not well defined in older research
2. Sensors are located all over the body in different densities
3. Functioning is not understood4. Signal conduction to the CNS is complex5. How the CNS interprets the information
is unknown…..basically we still have a lot to learn

Designing for Tactile Perception•Taction Sensitivity
▫Mechanoreceptors differentiate touch information based on: Strength of the stimulus Temporal rate of change Size of skin area stimulated Location of skin stimulated
Sensitivity is greatest on the face and fingertips; fair on the forearm and lower leg; also depends on temperature

Designing for Tactile Perception•Using temperature signals
▫Slow response time▫Poor in location identification▫Adapts to stimuli over time▫Integrates into one large signal from
several different stimuli▫Mechanical and temperature signals
interact

Designing for Tactile Perception•Strength of thermal stimulation depends
on location and size of the detecting body surface
•Sensation can be made stronger by increasing:▫The absolute temperature of the stimulus
and its difference from physiologic zero▫The rate of change in temperature▫The exposed surface

Designing for Tactile Perception•Rules of thumb for skin:
▫ Neutral temperature is 33◦C▫ 10 ◦C is painful; 18 ◦C is cold; 30 ◦C is cool▫ The highest sensitivities to changes in coolness are
between18-30 ◦C▫ Heat sensors respond well throughout the range of 20 -
47◦C▫ Thermal adaptation can occur between 18-42 ◦C▫ Very cold and very hot temperatures provoke sensations
of pain▫ Cold is sensed more quickly▫ Warmth is felt best in hairy regions, around the
kneecaps, fingers and elbows

Designing for Tactile Perception•Using the smell sense
▫Seldom used by engineers because…… People react differently to olfactory stimuli Smells are easily masked Stimuli to test olfaction are hard to set up
▫Common olfactory uses Adding methylmercaptan to natural gas Adding pyridin to argon

Designing for Tactile Perception•Using Electric signals
▫Seldom used for information carrier, but has great potential for transmitting signals
▫Electrode energies range between 30 microwatts – 300 milliwatts
▫Signal variation based on placement, intensity, duration and pulsation
▫Advantages: provides a clear, attention demanding signal that is resistant to masking
▫Disadvantages: weak stimuli create long response latencies, many misses and false alarms

Designing for Tactile Perception•Do not use pain as a signal stimulus
▫Cannot use for ethical reasons•Reaction and response
▫Reaction time is the period from the appearance of a stimulus to the beginning of a responding effector action
▫Reaction time + motion time = response time

Designing for Tactile Perception•Simple reactions
▫Shortest possible simplest reaction times (Table7.1) Small differences between electrical, tactile
and sound stimuli Sight and temperature within the range of
measuring accuracy and individuality Smell, taste and pain are the longest

Designing for Tactile Sensation
•Complex reactions▫Uncertainty of signal appearance▫Choice reaction▫Differentiation between stimuli creating the
response increases reaction time

Designing for Tactile Sensation• Reaction time + motion time = response
time• Minimizing response time is the goal
• Need to consider:1. The most appropriate stimulus2. Body part best suited for the task3. The equipment that allows the fastest execution

Summary
•Daily life relies on integrating information received by the senses
•Research can explain the basics of sensory processes, however many details are still unknown
•Challenges for future investigation





























