Embed Size (px)
Citation preview
FFy
FxF
Fy
Fx
Up
per
Darb
y H
igh
Sch
oo
l In
ven
Team
Fin
alist
60
1 N
ort
h L
an
sd
ow
ne
Ave
nu
e
Dre
xe
l H
ill,
PA
19
026
Me
ca
nu
m W
he
el
Dri
ve
Me
ca
nu
m D
rive
Sys
tem
~ M
ulti D
ire
ctio
na
l D
rive
Syste
m
NO
T just
anoth
er
om
ni-
wheel.
A
LL
WH
EE
L D
RIV
E,
AL
L D
IRE
CT
ION
S,
AL
L T
HE
TIM
E.
Ste
erin
g is a
ccom
plis
he
d w
ith
ou
t p
ivo
tin
g a
ny w
he
el.
Ab
ility
to
sp
in a
bou
t in
it’s o
wn
fo
ot p
rin
t.
Ab
ility
to
Dri
ve
Sid
ew
ays
! D
rive
in
an
y d
ire
ctio
n o
r co
mb
ina
tion
of
dire
ctio
ns.
Un
ma
tch
ed
ma
ne
uve
rab
ility
. In
dep
end
en
t m
oto
r con
tro
ls t
o e
ach
wh
ee
l.
Dis
cre
te,
dire
ction
al con
tro
l th
ru a
sin
gle
jo
ystick in
terf
ace
. E
ffic
ien
t d
rive
tra
in m
axim
ize
s b
att
ery
life.
Ro
bu
st
relia
ble
con
str
uctio
n.
Typic
al
Sin
gle
-Hub
Sp
lit-R
olle
r
Mecan
um
Whe
el
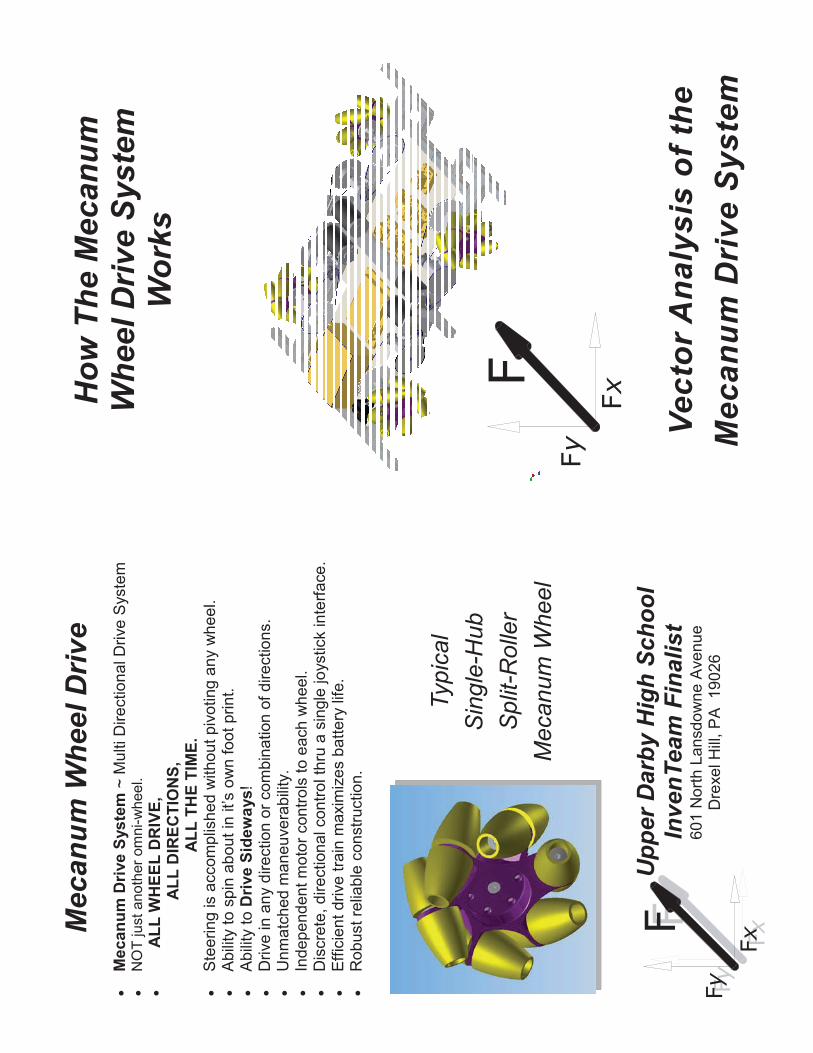
Ve
cto
r A
na
lys
is o
f th
e
Me
ca
nu
m D
riv
e S
ys
tem
FFy
Fx
Ho
w T
he
Me
ca
nu
m
Wh
eel
Dri
ve S
yste
m
Wo
rks

The M
ecanum
wheel drive s
yste
m.
Ste
ering in a
Me-
canum
dri
ve s
yste
m is a
ccom
plished b
y v
ary
ing t
he
speed a
nd r
ota
tion o
f each w
heel in
dependently.
The
wheels
exert
a b
iased forc
e t
o t
he g
round d
ue t
o t
he
45° inclination o
f th
e r
oller
to t
he d
riven h
ub a
xle
.
The w
heels
are
arr
anged in o
pposin
g p
airs form
ing a
dia
mond p
att
ern
on t
he f
loor.
W
heel ro
tation induces a
dia
go-
nal fo
rce p
erp
endic
ula
r to
the r
oller
axis
. T
his
forc
e is b
roken d
ow
n into
Fx
and Fy c
om
ponents
. B
ecause t
he
wheels
are
arr
anged in o
pposin
g p
airs
adja
cent
wheels
can a
nd d
o c
ancel equal and o
pposite
forc
es.
See fig
ure
1,
the a
ction is t
o d
rive forw
ard
. A
ll
wheels
rota
te in t
he s
am
e d
irection.
The Fx forc
es
are
equalized a
nd c
ancel each o
ther
out.
The r
esul-
tant
motion is t
he u
n-
resolv
ed Fy forc
es a
nd
there
fore
forw
ard
mo-
tion.
In
fig
ure
2,
the
desired m
otion is a
sid
ew
ays m
ove.
The
adja
cent
wheels
on
each s
ide a
re d
riven in
opposite d
irections.
The Fy forc
es a
re
equalized a
nd c
an-
Fig
ure
1
cele
d.
The r
esultant
motion is a
late
ral or
sid
ew
ays t
ravel.
Spin
motions a
re
sim
ilar
to a
conven-
tional ta
nk s
teer
ro-
bot.
O
n o
ne s
ide
both
moto
rs a
re
driven forw
ard
while
oth
er
sid
es a
re d
riven
the o
pposite d
irec-
tion.
The a
dja
cent
wheels
cancel th
e Fx v
ecto
r com
ponents
and s
pin
is
accom
plished.
Oth
er
com
bin
ations o
f
these m
otions r
esult in
spin
s,
arc
s,
and a
ngula
r
movem
ents
.
Fig
ure
2
Sim
plifi
ed V
ecto
r Diagr
amm
ing
Dra
w the
prim
ary
forc
e ve
ctor
s
Take
eac
h of
the
for
ce v
ecto
rs a
nd
ADD the
m tog
ethe
r Hea
d to
Tail
Dra
w a
res
ulta
nt v
ecto
r to
illu
stra
te
the
dire
ction
and
mag
nitu
de o
f th
e re
sulta
nt F
ORCES.





























