Embed Size (px)
Citation preview
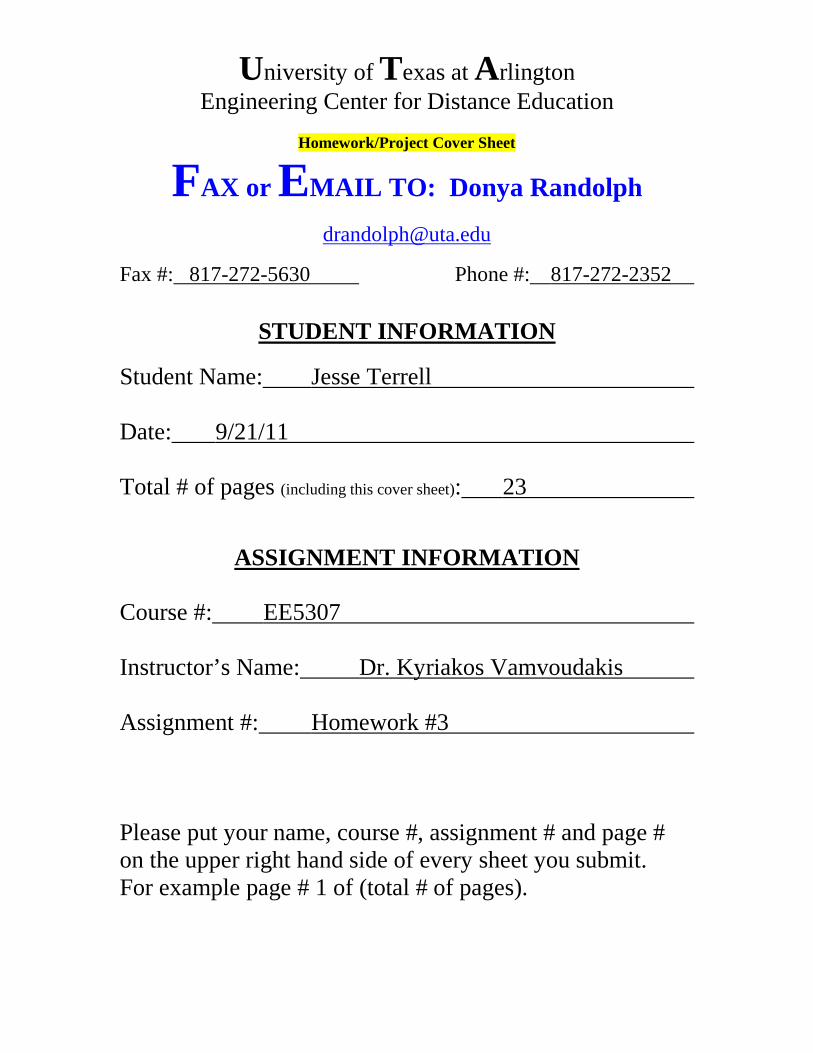
University of Texas at Arlington Engineering Center for Distance Education
Homework/Project Cover Sheet
FAX or EMAIL TO: Donya Randolph
Fax #: 817-272-5630 Phone #:
817-272-2352
STUDENT INFORMATION
Student Name:
Jesse Terrell
Date:
9/21/11
Total # of pages (including this cover sheet):
23
ASSIGNMENT INFORMATION
Course #:
EE5307
Instructor’s Name:
Dr. Kyriakos Vamvoudakis
Assignment #:
Homework #3
Please put your name, course #, assignment # and page # on the upper right hand side of every sheet you submit. For example page # 1 of (total # of pages).


Inverted Pendulum System Open Loop Response %System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:5; A=[0 1 0 0 ; 0 0 -1 0 ; 0 0 0 1 ; 0 0 10 0]; B=[0 ; 0.1 ; 0 ; -0.1]; C=[1 0 0 0]; D=[0]; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Open loop system response bode(H1) title('Bode Plots Gain & Phase') grid on
Page 3 of 23


Ball Balancer System Open Loop Response
%System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:5; A=[0 1 0 0 ; 0 0 -9 0 ; 0 0 0 1 ; -1 0 0 0]; B=[0 ; 0 ; 0 ; 0.1]; C=[1 0 0 0]; D=0; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Open loop system response bode(H1) title('Bode Plots Gain & Phase') grid on %Find determinant of the system syms s R=[s -1 0 0 ; 0 s 9 0 ; 0 0 s -1 ; 1 0 0 s]; D=det(R)
Page 11 of 22 Page 5 of 23


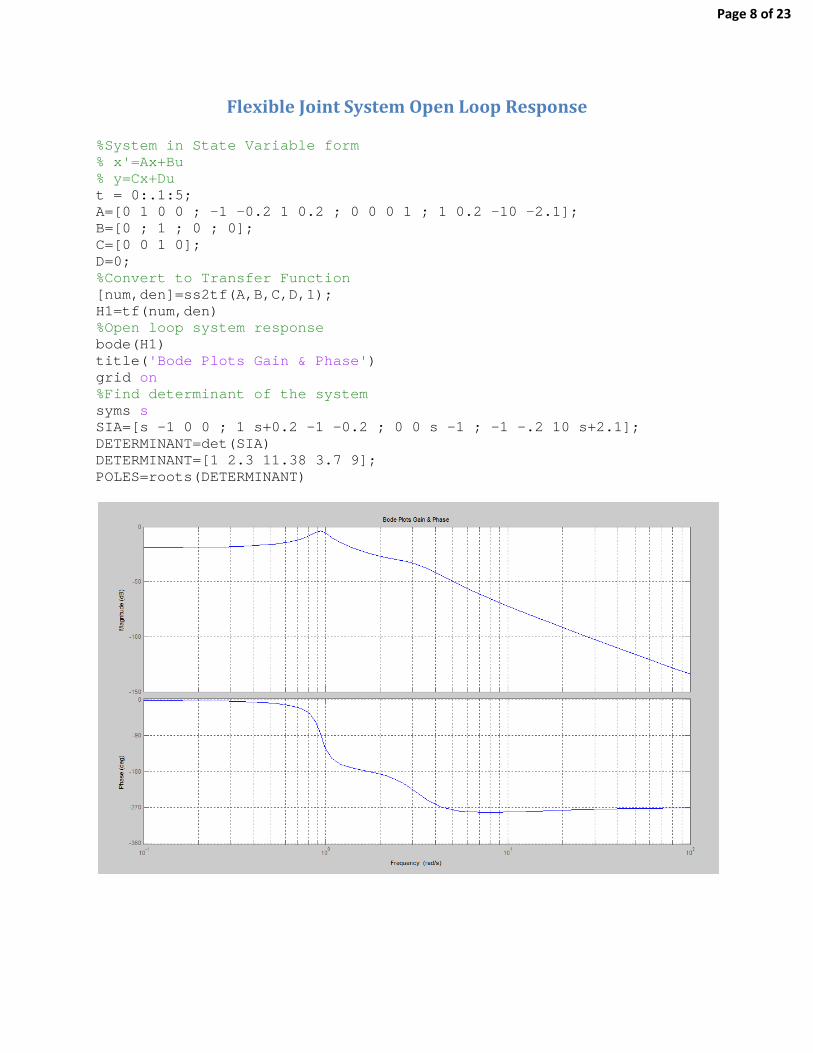
Flexible Joint System Open Loop Response %System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:5; A=[0 1 0 0 ; -1 -0.2 1 0.2 ; 0 0 0 1 ; 1 0.2 -10 -2.1]; B=[0 ; 1 ; 0 ; 0]; C=[0 0 1 0]; D=0; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Open loop system response bode(H1) title('Bode Plots Gain & Phase') grid on %Find determinant of the system syms s SIA=[s -1 0 0 ; 1 s+0.2 -1 -0.2 ; 0 0 s -1 ; -1 -.2 10 s+2.1]; DETERMINANT=det(SIA) DETERMINANT=[1 2.3 11.38 3.7 9]; POLES=roots(DETERMINANT)
Page 8 of 23
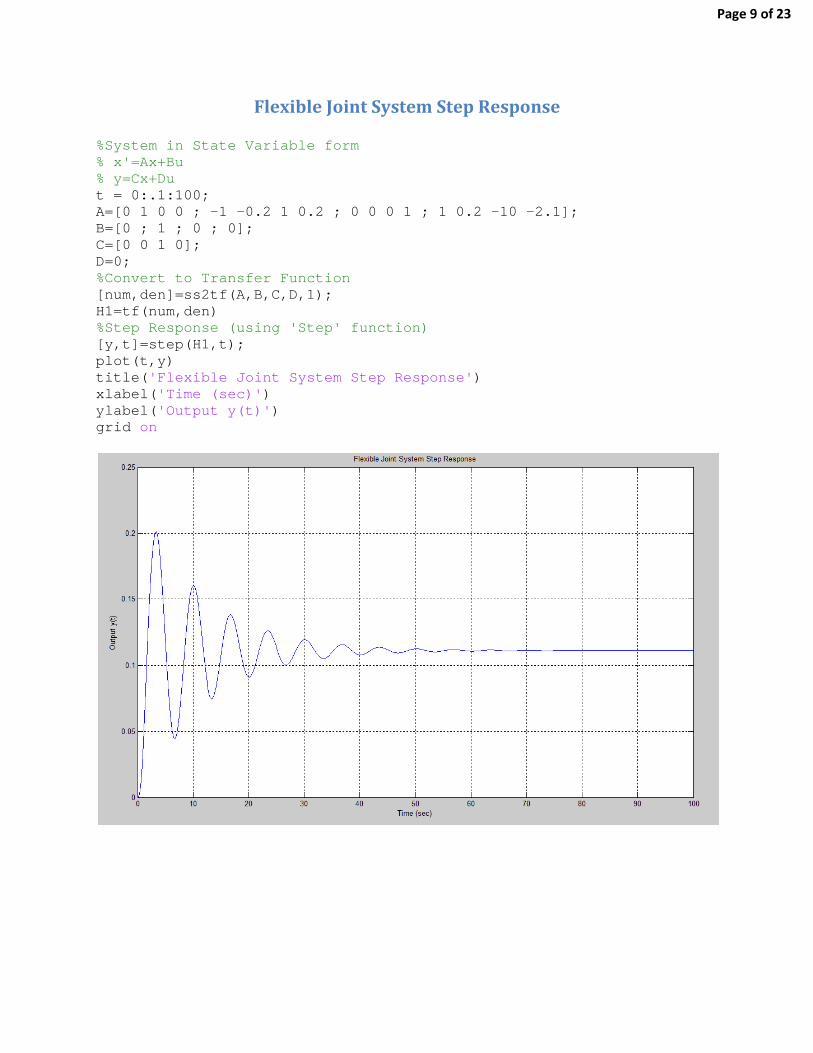
Flexible Joint System Step Response %System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:100; A=[0 1 0 0 ; -1 -0.2 1 0.2 ; 0 0 0 1 ; 1 0.2 -10 -2.1]; B=[0 ; 1 ; 0 ; 0]; C=[0 0 1 0]; D=0; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Step Response (using 'Step' function) [y,t]=step(H1,t); plot(t,y) title('Flexible Joint System Step Response') xlabel('Time (sec)') ylabel('Output y(t)') grid on
Page 9 of 23
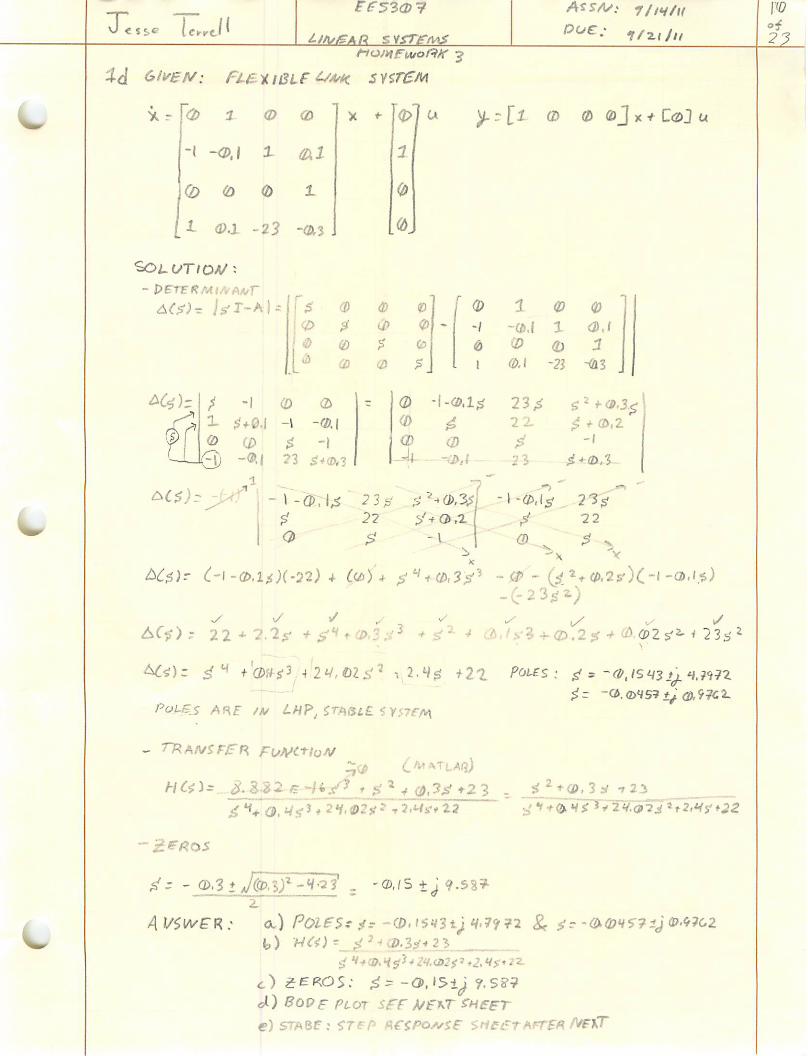
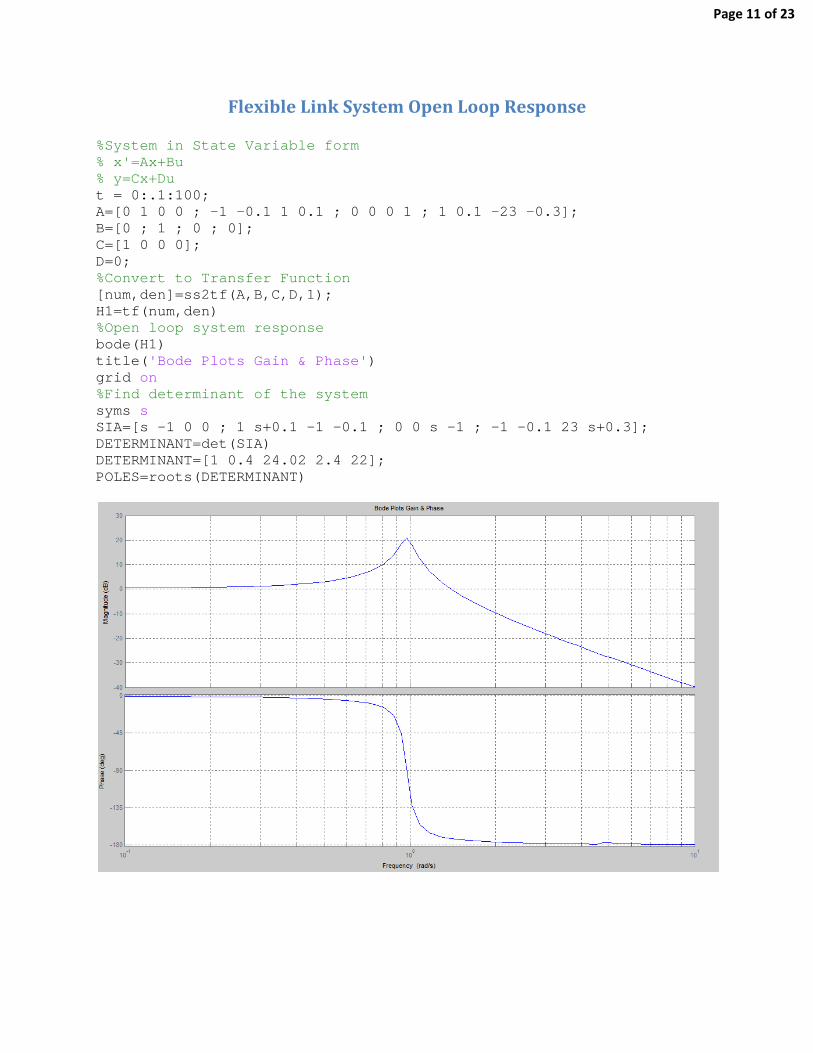
Flexible Link System Open Loop Response %System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:100; A=[0 1 0 0 ; -1 -0.1 1 0.1 ; 0 0 0 1 ; 1 0.1 -23 -0.3]; B=[0 ; 1 ; 0 ; 0]; C=[1 0 0 0]; D=0; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Open loop system response bode(H1) title('Bode Plots Gain & Phase') grid on %Find determinant of the system syms s SIA=[s -1 0 0 ; 1 s+0.1 -1 -0.1 ; 0 0 s -1 ; -1 -0.1 23 s+0.3]; DETERMINANT=det(SIA) DETERMINANT=[1 0.4 24.02 2.4 22]; POLES=roots(DETERMINANT)
Page 11 of 23

Flexible Link System Step Response %System in State Variable form % x'=Ax+Bu % y=Cx+Du t = 0:.1:100; A=[0 1 0 0 ; -1 -0.1 1 0.1 ; 0 0 0 1 ; 1 0.1 -23 -0.3]; B=[0 ; 1 ; 0 ; 0]; C=[1 0 0 0]; D=0; %Convert to Transfer Function [num,den]=ss2tf(A,B,C,D,1); H1=tf(num,den) %Step Response (using 'Step' function) [y,t]=step(H1,t); plot(t,y) title('Flexible Link System Step Response') xlabel('Time (sec)') ylabel('Output y(t)') grid on
Page 12 of 23









![Pêpêthikan Saking Kitab Suci...Daftar isi 1. Tumitahing Alam Donya[1]..... 4 2. Wiwitipun Wontên](https://img.dokumen.tips/doc/110x75/609c90e20ca73462da072877/ppthikan-saking-kitab-suci-daftar-isi-1-tumitahing-alam-donya1-4.jpg)









![Salam-Donya[4] · ##ˇ #####$ |% eic@salam-donya.ir ˘ ˘ ˇˆ ˘ ˇˆ ˙ ˝˛ˆ˚ ˜ ˘! ˘"# ˙ $ ˙ $˘% ˆ&’ ˇ ˙ˇ ˝ˆ˛ ˚ ˇ ˜˝ ( " ˘) *(˘ ˘ ˆ](https://img.dokumen.tips/doc/110x75/5f9a7dc13345a33b6a56e166/salam-donya4-eicsalam-donyair-.jpg)