Embed Size (px)
Citation preview

© fka 2016 · All rights reserved 2016/04/06 Slide No. 1 #150 · 16HD0008.pptx
San Jose, 6th April 2016
Dipl.-Inform. Janek Hudecek, Dipl.-Ing. Christoph Klas
A Universal Trajectory Generator for Automated Vehicles
GPU Technology Conference
Forschungsgesellschaft Kraftfahrwesen mbH Aachen

© fka 2016 · All rights reserved 2016/04/06 Slide No. 2 #150 · 16HD0008.pptx
Motivation and Introduction Information Processing in Automated Vehicles
Automation tasks can typically be divided into
1. Perception: Digitalization of environment – object detection, freespace detection, characterization
2. Interpretation: Gathering of semantic scene understanding
3. Motion Planning: Behavior generation and trajectory planning
4. Actuation: Trajectory tracking and vehicle dynamics controller
1. Perception &
2. Interpretation
3.1 Behavior
Generation
3.2 Trajectory
Planning 4. Actuation Sensing
src: Augsburger Allgemeine

© fka 2016 · All rights reserved 2016/04/06 Slide No. 3 #150 · 16HD0008.pptx
Trajectory Planning via Nonlinear Model-Predictive Control General Idea: NMPC Based Realization
TPS is based on nonlinear model-predictive control
NMPC embeds an optimal control problem (OCP)
A control function is applied to a vehicle model and the resulting trajectory is calculated
Evaluation of state and control constraints of resulting trajectory
Control Function Vehicle Model & Rating Drivable Trajectory
Obstacle
Ego-Vehicle
State Trajectory

© fka 2016 · All rights reserved 2016/04/06 Slide No. 4 #150 · 16HD0008.pptx
Trajectory Planning via Nonlinear Model-Predictive Control Optimal Control Problem
General formulation of OCP:
Follow a given reference, optimize comfort aspects
Stay inside a (dynamic) driving corridor
Respect vehicle dynamics, represented by a
single track model (STM)
State definition depends on STM, usually
Underlying OCP is formulated as NLP:
Rating of resulting trajectory by cost functional
Evaluation of feasibility by constraint definition
Collision awareness
Observe dynamic and kinematic constraints
Respect underlying vehicle model Driving Corridor
Intermediate State
Collision Circles
Elimination of
State-Defects
© fka 2016 · All rights reserved 2016/04/06 Slide No. 5 #150 · 16HD0008.pptx
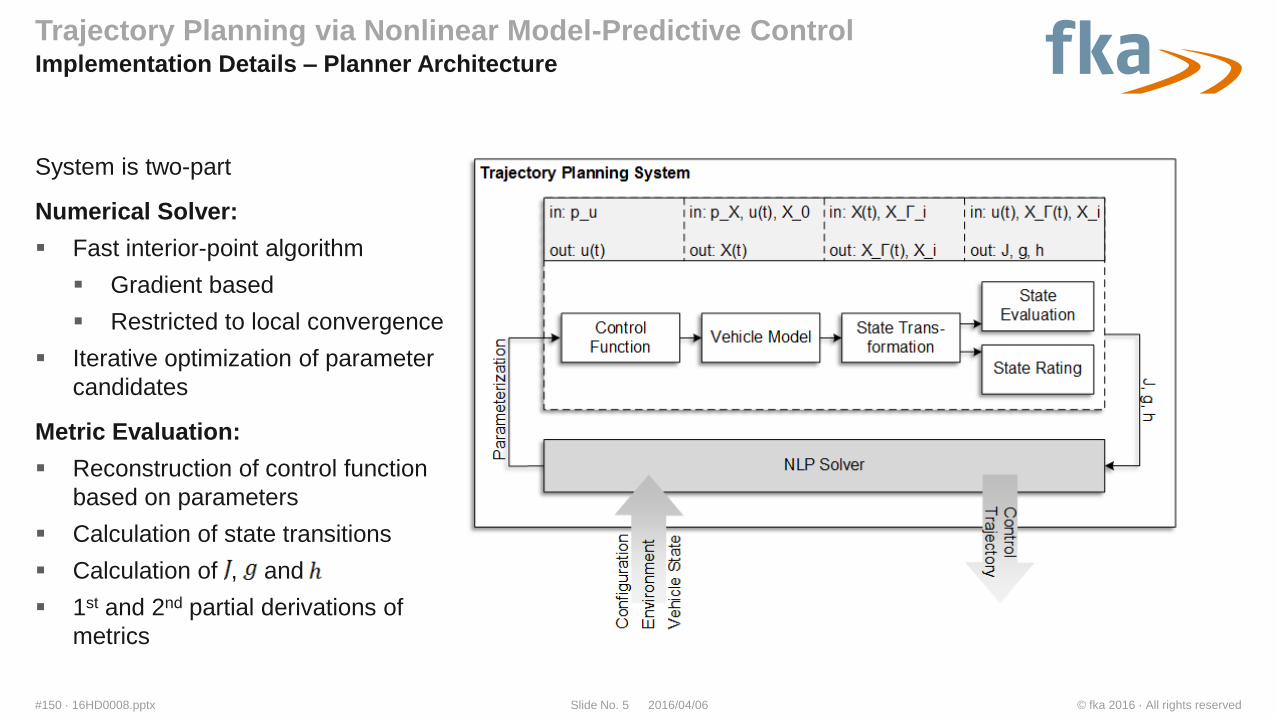
Trajectory Planning via Nonlinear Model-Predictive Control Implementation Details – Planner Architecture
System is two-part
Numerical Solver:
Fast interior-point algorithm
Gradient based
Restricted to local convergence
Iterative optimization of parameter
candidates
Metric Evaluation:
Reconstruction of control function
based on parameters
Calculation of state transitions
Calculation of , and
1st and 2nd partial derivations of
metrics

© fka 2016 · All rights reserved 2016/04/06 Slide No. 6 #150 · 16HD0008.pptx
Trajectory Planning via Nonlinear Model-Predictive Control Implementation Details – Decomposition Strategy
Implementation Details
Derivations are calculated via
Hyperdual Numbers (AutoDiff)
Partial derivations are
independent of each other
Each derivation correlates to a job
Depending on no. of parameters
~500 – 10.000 jobs
Data decomposition: Jobs are
assigned to blocks
Per job 128 – 512 samples
Task decomposition: Samples are
assigned to threads

© fka 2016 · All rights reserved 2016/04/06 Slide No. 7 #150 · 16HD0008.pptx
Trajectory Planning via Nonlinear Model-Predictive Control Implementation Details – Parallelization Example
© fka 2016 · All rights reserved 2016/04/06 Slide No. 8 #150 · 16HD0008.pptx
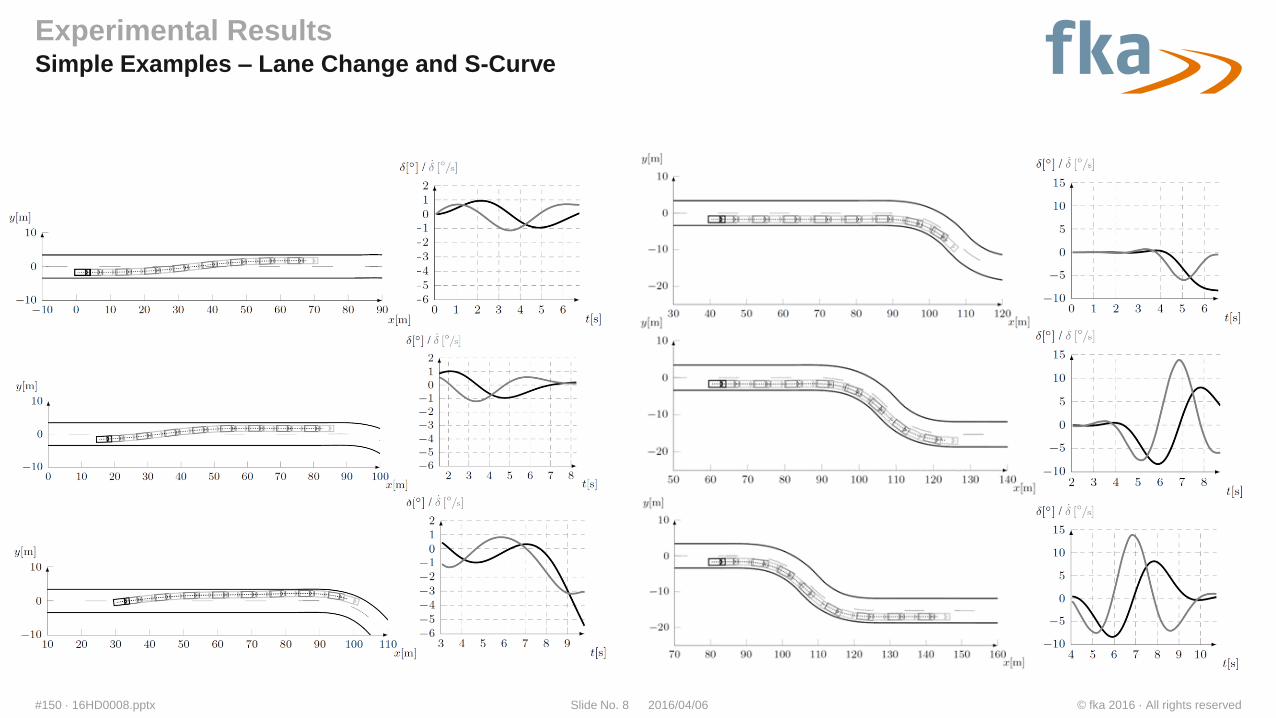
Experimental Results Simple Examples – Lane Change and S-Curve

© fka 2016 · All rights reserved 2016/04/06 Slide No. 9 #150 · 16HD0008.pptx
Experimental Results Vehicle Models – Vehicle and Vehicle/Trailer Combination
Vehicle Only Vehicle/Tailer Combination

© fka 2016 · All rights reserved 2016/04/06 Slide No. 10 #150 · 16HD0008.pptx
Experimental Results Real Driving Scenario – Double Curve with Obstacle
© fka 2016 · All rights reserved 2016/04/06 Slide No. 11 #150 · 16HD0008.pptx
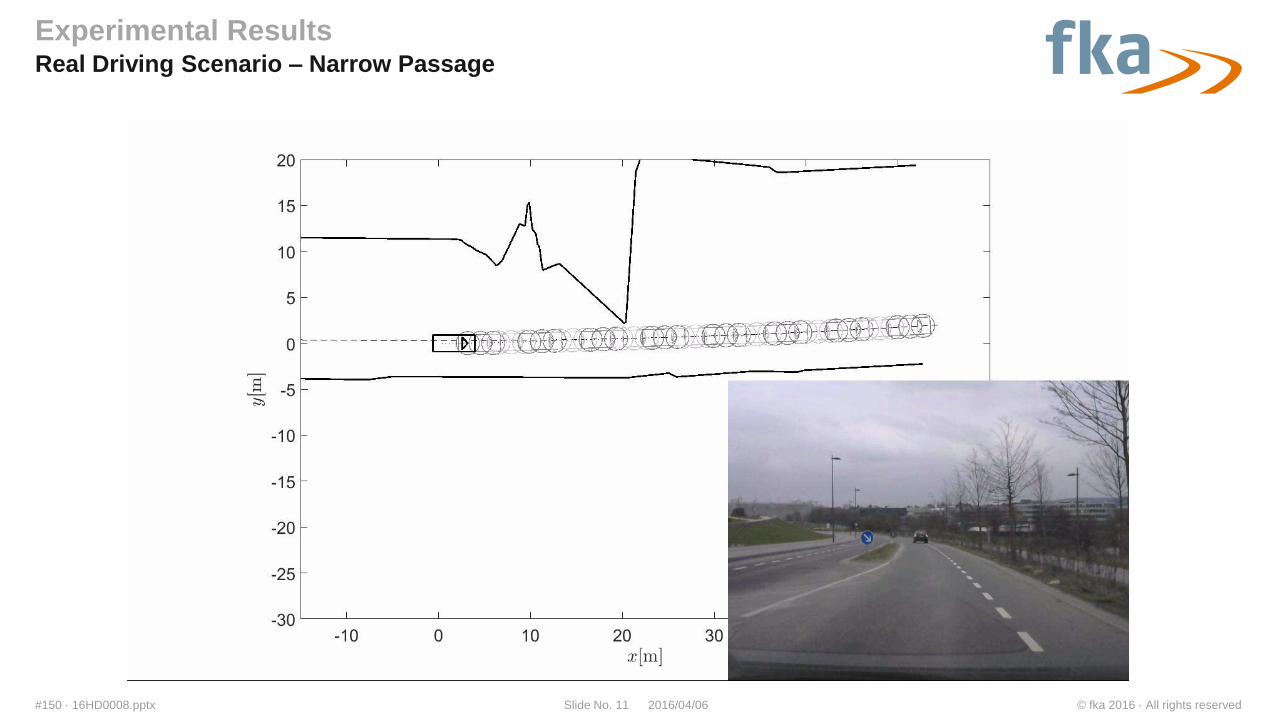
Experimental Results Real Driving Scenario – Narrow Passage

© fka 2016 · All rights reserved 2016/04/06 Slide No. 12 #150 · 16HD0008.pptx
Experimental Results Optimizing the Cost Functional
Cost Functional represents several
optimization criteria
Lateral jerk/acceleration/smoothness
Distance to reference curve
Exemplary variation of the parameters
adjusting distance to given reference
Uprating leads to undesired driving
behavior in case of a bad guess
Tuning to subjectively comfortable and
safe behavior is a key factor
Clear distinction of tasks between
behavior decision and trajectory
planner needs to be defined
E.g. behavior layer has to decide when
to execute lane changes
© fka 2016 · All rights reserved 2016/04/06 Slide No. 13 #150 · 16HD0008.pptx
Conclusions:
Presented TPS implements a versatile, adaptive and ultra fast approach
System is currently ported to run on NVIDIA DRIVE PX platform in realtime
First results are very promising in terms of runtime
Next Steps:
Integration of TPS into test vehicle as part of automated driving system
Environment detection e.g. by Nvidia DriveWorks
Closed-loop trajectory tracker
Further research:
Development and integration of human inspired behavior decision system
Subjective decisions respecting traffic rules
Gaining understanding in online-parameterization for subjective evaluation
Integration of overall system into electric vehicle research platform SpeedE
Summary and Outlook




























