Embed Size (px)
Citation preview

Government Polytechnic Muzaffarpur Name of the Lab: A. C. Machines Lab
Subject Code: 1620507
Experiment-2
Aim: To conduct the direct load test on the given three phase induction motor and to determine
& plot its performance characteristics.
Apparatus required:
S.No.
Name of
Apparatus
Range
Type Quantity
1. Voltmeter (0-600)V MI 1
2. Wattmeter 600V,5A UPF 2
3. Ammeter (0-10)A MI 1
4. Tachometer - Digital 1
5. TPST Switch - - 1
6. Three phase
Variac
- - 1
7. Connecting wires - - As needed
Formula:
Input power = W1*MF1+W2*MF2 (Watts)
Torque (T) = (S1-S2)*9.81*r (N-m)
Output Power = 2ΠNT/60 Watts
Efficiency = (Output power/Input power)*100%
Slip =
S1, S2 = spring balance reading in Kg.
r = radius of the brake drum in m (circumference/2Π)
N = Actual speed of the rotor in rpm
T = Torque
[NS – Synchronous speed = 120*f/P (in rpm) [N = Speed of the motor]

P = No of poles, f = Frequency of supply]
( ) √
[ ]
Tabulation:
S
No
V I Input Power Spring
Balance
Torque Output
power
Slip Efficy Power
factor
W1 W2 W1+W2 Speed S1 S2 S1-
S2
N-m Watts % %
O A O A
Precautions:
1. There should be no load at the time of starting.
2. Auto transformer must be kept at minimum voltage position.
Procedure:
1. Connections are given as per circuit diagram.
2. Observing the precautions the TPST switch is closed.
3. Adjust the auto transformer to get the rated voltage.
4. A set of no load readings are noted down.
5. Apply the load gradually and note down ammeter, voltmeter and wattmeter reading
simultaneously, care should be taken that load current should not exceed the rated value.
Disconnect the load and bring the autotransformer to minimum position and open the TPST
switch.
Result:
Thus the load test on three phase squirrel cage induction motor was conducted.

Government Polytechnic Muzaffarpur Name of the Lab: A. C. Machines Lab
Subject Code: 1620507
Experiment-3
Aim: To study the effect of different methods of starting of three-phase squirrel cage induction
motor using
1. DOL starter
2. Auto transformer starter
3. Star delta starter
Apparatus required:
S No Apparatus name Apparatus type Specification
1 Induction motor
2 Alternator
3 Voltmeter
4 DOL starter
5 Auto transformer starter
6 Star delta starter
Theory:
Direct on line Starter:
In this case of starting full supply voltage is connected to the motor. This starter doesn’t provide
any reduction in starting current or starting torque. For small size motor (less than 2 HP) where
starting torque is about twice the full-load torque and starting period lasts only a few seconds,
this type starter is used. The schematic diagram for DOL starter is shown in Fig.
In this case starting torque, (
)
Where, Tf = Full load torque.
If = full load current
Isc = starting current
Sf = full load slip
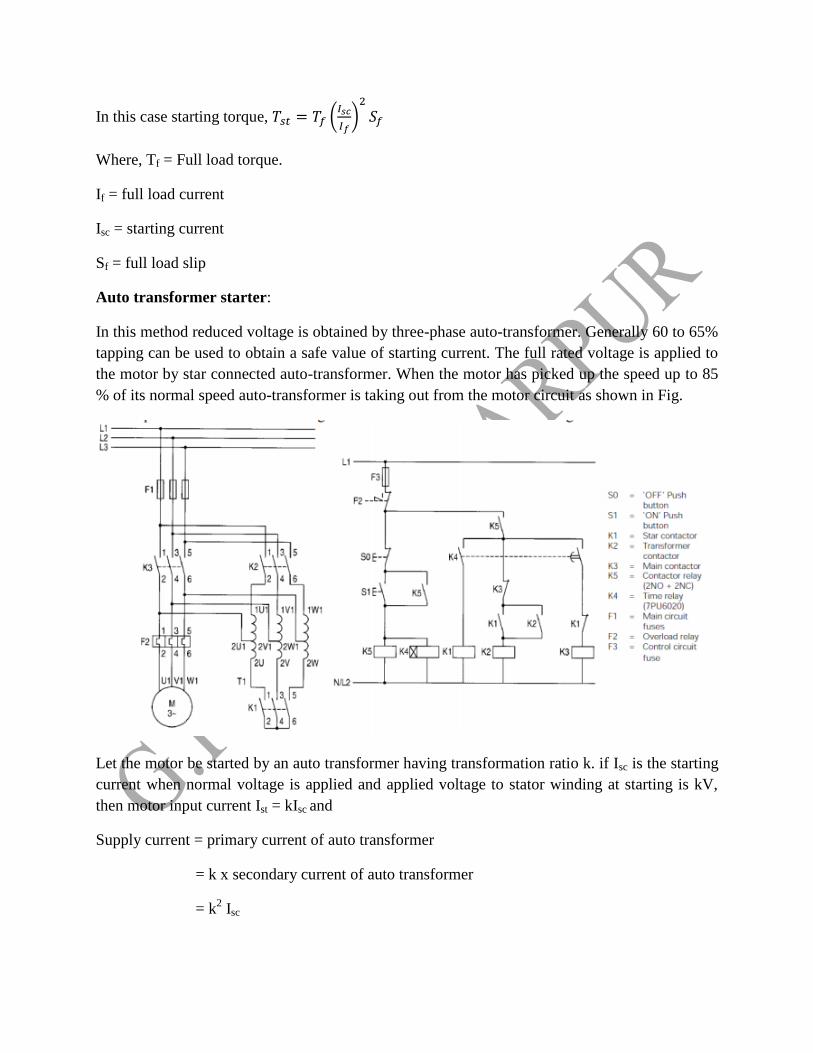
Auto transformer starter:
In this method reduced voltage is obtained by three-phase auto-transformer. Generally 60 to 65%
tapping can be used to obtain a safe value of starting current. The full rated voltage is applied to
the motor by star connected auto-transformer. When the motor has picked up the speed up to 85
% of its normal speed auto-transformer is taking out from the motor circuit as shown in Fig.
Let the motor be started by an auto transformer having transformation ratio k. if Isc is the starting
current when normal voltage is applied and applied voltage to stator winding at starting is kV,
then motor input current Ist = kIsc and
Supply current = primary current of auto transformer
= k x secondary current of auto transformer
= k2 Isc

Starting torque (
)
Star delta starter:
In this method reduced voltage is obtained by star-delta starter. This method of starting is based
up to the principle that with 3 windings connected in star, voltage across each winding is √
i.e. 57.7 %. Of the line to line voltage whereas the same winding connected in delta will have full
line to line voltage across each. The star-delta starter is connected to the stator winding in star
across the rated supply voltage at the starting instant. After the motor attain the speed up to 85 %
of its normal speed the same stator winding is reconnected in delta through a change over switch
across the same supply voltage as shown in Fig.
Since at the starting instant, the stator winding are connected in star, so voltage across each phase
winding is reduced to √ of the line voltage and therefore starting current per phase become
equal to √ . So starting torque (
√ )
(
)
Circuit diagram:

Procedure:
Direct on line starting:
i. Make the connection as shown in Fig.
ii. Connect the motor in Delta and switch ON the DOL starter and instantly note down the
initial current.
iii. When motor attain the rated speed note down the voltage, current and speed of the motor.
iv. Switch OFF the power supply and disconnect the motor.
Auto transformer starting:
i. Make the connection as shown in Fig.
ii. Connect the motor in Delta and switch ON the power supply.
iii. Put the knob of starter on 25 % tap position and instantly note down the initial current.
iv. When motor attain the rated speed note down the voltage, current and speed of the motor.
v. Follow the same procedure for 50 % tap and 100 % tap.
vi. Switch OFF the power supply and disconnect the motor.
Star delta starting:
i. Make the connection as shown in Fig.
ii. Switch ON the power supply.
iii. Put the handle of starter on start position and instantly note down the initial current.

iv. When motor attain the speed up to 85 % of its normal speed put the handle of starter on
run position and note down the voltage, current and speed of the motor.
v. Switch OFF the power supply and disconnect the motor.
Observation table:
Connection Current Voltage
(volts)
Speed
(rpm)
Slip
(%)
Torque
ratio Initial
maximum
value Isc
Steady
state value
If
DOL
Auto transformer (25%)
Auto transformer (50%)
Auto transformer (100%)
Star delta Y ∆
Result:
Calculate the sleep and ratio of starting torque and full load torque for each step.

Government Polytechnic Muzaffarpur Name of the Lab: A. C. Machines Lab
Subject Code: 1620507
Experiment-5
Aim: To determine the voltage regulation of a three phase alternator by synchronous impedance
method.
Apparatus required:
S No Apparatus name Apparatus type Specification
1 Motor
2 Alternator
3 Voltmeter
4 Ammeter 1
5 Ammeter 2
6 Rheostat
Theory:
The synchronous impedance of a given three phase alternator can be determined from the
following two experiments.
Open circuit test:
In this test, the alternator is run with the prime mover i.e. DC motor. The output terminals of the
alternator are kept open i.e. alternator run on no-load. The induce emf per phase corresponding to
various values of field current is measured. The curve is drawn between the induced emf per
phase and the field current as shown in Fig (Curve I). This curve is known as open circuit
characteristics (O.C.C.).
Short circuit test:
In this test, the output terminals of the alternator are short circuited through low resistance
ammeter. The short circuit current is measured corresponding to various values of field current
while speed is kept constant with the help of field rheostat. The curve is drawn between short
circuit current and field current as shown in Fig. (Curve II). This curve is known as short circuit
current (S.C.C.).

Let OA represent the field current corresponding to rated terminal voltage. Then AB represents
the rated short circuited current and AC represents the induced e.m.f. per phase. Under the short
circuit condition whole of the e.m.f. AC is used to create the short circuit current AB. Now, we
can write:
( )
( )
The value of armature resistance per phase Ra can be determined by an accurate ohmmeter.
Effective value of armature resistance can be determined by increasing the measured value by 20
% to account for the skin effect and effect of temperature rise. Then, synchronous reactance Xs
can be calculated as √
. The regulation of a synchronous generator is the rise of
terminal voltage of an isolated machine when full load at given power factor is removed from the
machine considering the field excitation and speed remaining constant. If Ia be rated current,
from phasor diagram of alternator at lagging load (Fig 2.) induced e.m.f. per phase
√( ) ( )2. If Vt be normal rated terminal voltage and the terminal
voltage rises to Eo when full load is thrown off, then
x100%. For lagging
power factor value of should be taken as positive and for leading power factor value of
taken as negative.

Circuit diagram:
Procedure:
i. Connect the circuit as shown in Fig. 1.
ii. Set motor field rheostat Rfm to its minimum and potential divider to zero output.
iii. Switch ON the DC power supply and start the motor with the help of three point starter.
iv. Adjust the speed of motor equal to the synchronous speed of alternator with the help of
field rheostat. Maintain this synchronous speed throughout the experiment.
v. Increase alternator field current by varying the field voltage gradually. Note down the
voltmeter reading connected across the alternator terminals for various values of
alternator field current. Go up to 10 % above the rated voltage of alternator.
vi. Switch OFF the DC supply.
vii. Short the alternator output through ammeter as shown in Fig. 2 and repeat steps 3 & 4
above.

viii. Increase alternator field current by varying field voltage gradually. Note ammeter
readings connected across the alternator terminals for various values of alternator field
current.
ix. Switch OFF the DC supply and disconnect all connection.
x. Measure per phase armature resistance and field resistance with the help of multi meter.
xi. Plot the O.C.C. and S.C.C. curves.
xii. Calculated the value of synchronous reactance and regulation of alternator.
Observation table:
S No Open circuit test Short circuit test
Field current If Terminal
voltage Vt
Field current If Short circuit
current Isc
1
2
3
4
5
Armature resistance per phase = ……………Ω
Effective value of armature resistance = …….Ω
Result:
Synchronous impedance per phase = ……….Ω
Voltage regulation at 0.8 power factor lagging = …………%
Voltage regulation at 0.8 power factor leading = …………%
Voltage regulation at zero power factor = …………%

Government Polytechnic Muzaffarpur Name of the Lab: A. C. Machines Lab
Subject Code: 1620507
Experiment-7
Aim: To obtain V and inverted V curves of a 3 phase Synchronous Motor.
Apparatus required:
S No Apparatus Type Range Quantity
1 Ammeter MI 0-5A 2
2 Voltmeter MI 0-600V 2
3 Ammeter MC 0-2A 1
4 Rheostat 1000Ω, 1.2A 1
5 Wattmeter UPF 600V, 5A 2
Fuse rating:
125% of rated current (full load current).
Formula used:
√ ( ) ( )
[√ ( ) ( )]
Power factor =
Observation table:
S No If amp Ia amp W1 watts W2 watts pf
Obs Act Obs Act

Precautions:
i. The auto transformer is kept in the minimum position.
ii. The potential divider is kept in a position such that the voltage is minimum.
iii. TPST switch should be kept open.
Procedure:
i. Connections are given as per the circuit diagram.
ii. After observing the precautions the AC supply is switched ON and the TPST is closed.
iii. Now close the DPST switch and increases the field current.
iv. Increasing the field current decreases the armature at a particular point. The further
increase in field current will increase armature current. Note down the reading and bring
back the potential divider to its minimum position.
v. Follow the steps at no load.
vi. Now apply some load and repeat then procedure and tabulate the readings.
vii. V curves are plotted between armature current and field current.
viii. Inverted V curve plotted between power factor and field current.
Model graph:
Result:
Thus the V and inverted V curves of the three phase synchronous motor were drawn.





























