Embed Size (px)
Citation preview

German Aerospace Center
(DLR)
Alberto Viseras Ruiz

Who I am…
www.DLR.de • Chart 2 > Alberto Viseras Ruiz • Presentation DLR > 23 January 2015
Alberto Viseras Ruiz:
o Telecommunications Engineer UMA.
o Research intern at Sony Deutschland
GmbH, Stuttgart.
o Master Thesis at German Aerospace
Center (DLR).
o Working at DLR since October, 2013.

Agenda
1. Research Institutions in Germany
2. German Aerospace Center (DLR)
3. Communications Systems Department
4. Master Thesis‘ Topics
5. Career Opportunities. How can I join DLR?
www.DLR.de • Chart 3 > Alberto Viseras Ruiz • Presentation DLR > 23 January 2015

Research Institutions in Germany
www.DLR.de • Chart 4 > Alberto Viseras Ruiz • Presentation DLR > 23 January 2015
Max Planck German Aerospace
Center Fraunhofer
Juan Ignacio Cirac Pedro Duque

www.DLR.de > Institute of Communications and Navigation > Department Communications Systems > Uwe-Carsten Fiebig et al. > January 2015 > Slide No. 5
n Cologne
n Oberpfaffenhofen
Braunschweig n
n Goettingen
Berlin n
n Bonn
n Neustrelitz
Weilheim n
Bremen n n Trauen
Lampoldshausen n
Stuttgart n
Stade n
Augsburg n
n Hamburg
Juelich n
DLR – German Aerospace Research
7700 employees across 32
institutes and facilities at 16
sites
Offices in Brussels, Paris, Tokyo
and Washington

www.DLR.de > Institute of Communications and Navigation > Department Communications Systems > Uwe-Carsten Fiebig et al. > January 2015 > Slide No. 6
Common methods and expertise
Estimation theory
Signal processing
Signal propagation
Measurement tools
Applications
Mass market
Professional (aviation)
Safety of Life
Space
Air-Ground Communication
Air-to-Air Communication
Surveillance
APNT
LTE Based Positioning
Swarm Navigation
End-to-End Bayesian Navigation
Signal Propagation
Maritime Communications
Car-to-X Communications
Train-to-X Communications
Railway Collision Avoidance
Relative Positioning
Pedestrian & Vehicular Navigation
40 employees: 19 PhD students, 17 PhD scientists,
2 technicians, 2 secretaries
Institute of Communications and Navigation
Department Communications Systems
Organisation of the Department
Decentralised autonomous methods
Obstacle avoidance
Field tests with flying platforms
Master Thesis‘ Topics
o Two-way Ranging with LDACS1.
o An ultrasonic sensor array for environment sounding with sparsity
constraints.
o Attribute-distributed learning for multi-agent robotic swarms.
o Consensus Algorithms for Optimal Multi-Agent Path Planning in the
Presence of Uncertainty.
o Multipath Assisted Positioning: Mapping of Virtual Transmitters.
o FootSLAM with Multiple Sensors.
o FeetSLAM Automation with and without Wireless Measurements.
o From FootSLAM to MotionSLAM – Non-Walking Motion Modes.
www.DLR.de • Chart 7 > Alberto Viseras Ruiz • Presentation DLR > 23 January 2015
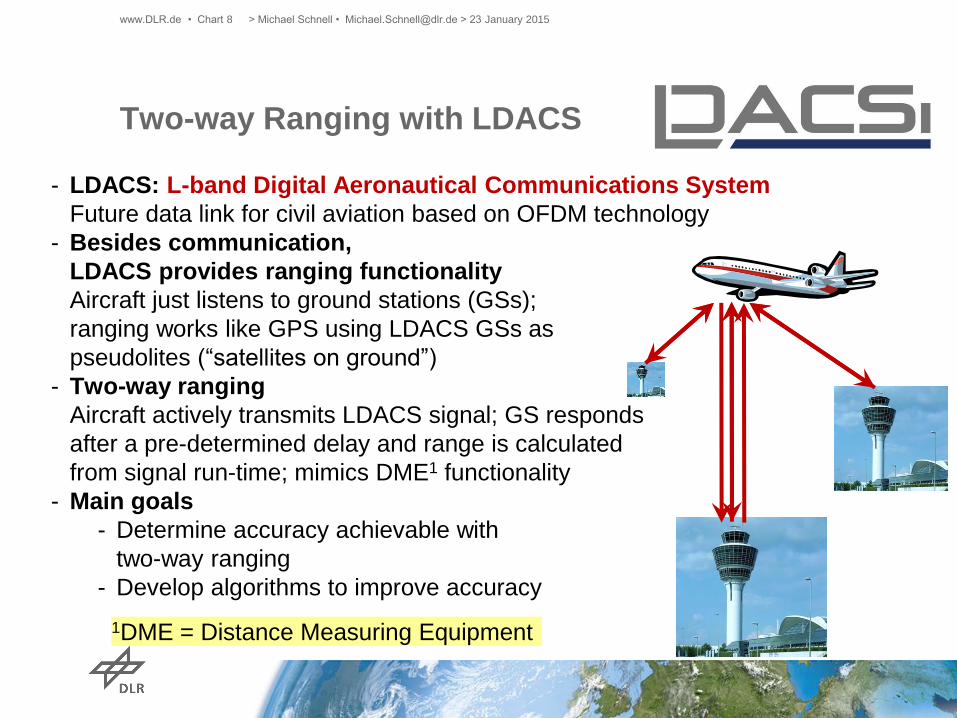
- LDACS: L-band Digital Aeronautical Communications System
Future data link for civil aviation based on OFDM technology
- Besides communication,
LDACS provides ranging functionality
Aircraft just listens to ground stations (GSs);
ranging works like GPS using LDACS GSs as
pseudolites (“satellites on ground”)
- Two-way ranging
Aircraft actively transmits LDACS signal; GS responds
after a pre-determined delay and range is calculated
from signal run-time; mimics DME1 functionality
- Main goals
- Determine accuracy achievable with
two-way ranging
- Develop algorithms to improve accuracy
Two-way Ranging with LDACS
1DME = Distance Measuring Equipment
> Michael Schnell • [email protected] > 23 January 2015 www.DLR.de • Chart 8

- We consider an attribute-distributed learning of L agents in a robotic swarm
Goal: given N instances of the observed attributes 𝑋 and targets Y,
how to learn a nonlinear function 𝑌 = 𝑓(𝑋) in a distributed fashion?
Attribute-distributed learning for multi-agent
robotic swarms
Agent 1
Agent 2
Agent L
> Dmitriy Shutin• [email protected] > 23 January 2015 www.DLR.de • Chart 9

An ultrasonic sensor array for environment
sounding with sparsity constraints
www.DLR.de • Chart 10 > Christoph Manß • [email protected] > 23 January 2015
• Objects can be considered
as „peaks“ in the
environment (sparsity)
• Use compressive sensing
techniques to determine
the location of each object
• Different soundings give
more information of the
environment
• Test the whole array on a
quad

Consensus Algorithms for Optimal Multi-Agent
Path Planning in the Presence of Uncertainty
www.DLR.de • Chart 11 > Alberto Viseras Ruiz • [email protected] > 23 January 2015
o The agent 1 wants to go from A1
to B1.
o We have uncertainty about the
pose, motion and obstacles.
o How can we find the optimal
path while keeping the collision
probability bounded?
A1
1
B1
Chance Constrained
LQR-RRT*

Consensus Algorithms for Optimal Multi-Agent
Path Planning in the Presence of Uncertainty
www.DLR.de • Chart 12 > Alberto Viseras Ruiz • [email protected] > 23 January 2015
o The agent 1 wants to go from A1
to B1 and agent 2 from A2 to B2.
A1
1 2
A2
B2
B1
Crash!!!
But they can talk
with each other…

Consensus Algorithms for Optimal Multi-Agent
Path Planning in the Presence of Uncertainty
www.DLR.de • Chart 13 > Alberto Viseras Ruiz • [email protected] > 23 January 2015
o They can talk and agree that
agent 1 will change its route.
o But they have to reach a
consensus.
A1
1 2
A2
B2
B1
o How can we find the global
optimal path so that we keep the
collision probability with obstacles
and agents bounded?
That would be your
work

Position estimation not
possible because
possible position lies on
all positions on the circle
Signal is additionally
reflected on the wall
Multipath Assisted Positioning: Mapping of Virtual Transmitters
- Each multipath components is treated as
signals emitted from virtual transmitters
- Multipath propagation increases the number
of transmitters by virtual transmitters
Problem: - Location of the virtual transmitters
are unknown
- No information about floor-plan
Solution: - Simultaneously estimation of the virtual
transmitter and receiver position
Master Thesis: - Position of virtual transmitters are static over
time
- Derive a mapping algorithm for virtual
transmitters.
Virtual transmitter: Mirroring the
transmitter on the wall
Map with one real transmitter and many virtual
transmitters!
Using multipath components for positioning allows
positioning with only one physical transmitter!
> Christian Gentner • [email protected] > 23 January 2015 www.DLR.de • Chart 14

FootSLAM with Multiple Sensors
FootSLAM estimates an indoor map with an IMU placed on the foot assuming
walking and making use of the rest phase of the foot to reduce the drift
(ZUPT).
Master Thesis:
Extend FootSLAM framework:
• Several sensors on foot and on body
• Combine measurements in appropriate way
• Performance evaluation with multiple sensors
• Investigate robustness against sensor failures
Estimated
FootSLAM
map:
IMU placed on
the foot
> Susanna Kaiser • [email protected] > 23 January 2015 www.DLR.de • Chart 15

FeetSLAM Automation with and without Wireless
Measurements
Collaborative Mapping: Combined
FeetSLAM map from these six data sets:
FootSLAM estimates an indoor map. FeetSLAM combines several maps:
Challenges:
Master Thesis:
• FootSLAM maps rotational invariant map orientation unknown
• Starting point usally also unknown
• Map fusion only successful, if position and orientation of maps given
Enhance the alignment and combination of the maps in FeetSLAM by
• automating map alignment with and without available (wireless) prior information
• investigating suitable, available wireless prior information for FeetSLAM,
e.g., UWB, GPS when starting outdoors, UMTS, or, WLAN, and the performance thereof
> Susanna Kaiser • [email protected] > 23 January 2015 www.DLR.de • Chart 16

From FootSLAM to MotionSLAM – Non-Walking
Motion Modes
Challenges:
Master Thesis:
New motion modes, e.g., crawling, kicking stairs, or fast running
lead to measurements where foot rest assumption may not be valid
Extend FootSLAM framework:
• Enable at least crawling
• Combine two sensors: foot-mounted and hip- or thigh-mounted to estimate
motion mode
FootSLAM estimates an indoor map with an IMU placed on the foot assuming
walking and making use of the rest phase of the foot to reduce the drift
(ZUPT).
Estimated
FootSLAM
map:
IMU placed on
the foot and at
hip
“Standing”
> Susanna Kaiser • [email protected] > 23 January 2015 www.DLR.de • Chart 17

- You have good to excellent marks!
- You are creative and you want to put your acquired knowledge into practice!
- You enjoy working with a young, dynamic, international team of researchers!
- You are interested in the multi-faceted field of aerospace, energy and
transport!
- Flexible starting dates depending on individual topic/supervisor
Apply for the exchange program with the German Aerospace Center
Until 09/02/2015
Application: List of topics according to your preferences, CV, Motivation letter,
Transcript of records, Average Grade, Some restrictions about the starting date.
(in English)
Phone interview with responsible persons of Master‘s thesis in DLR
How to apply? → contact your university‘s coordinator
Department Communications Systems
Career Opportunities
> Alberto Viseras Ruiz • Presentation DLR > 23 January 2015 www.DLR.de • Chart 18

DLR exchange program
• Duties:
- Daily presence at DLR at core office times
- Submission of a preliminary (but corrected) version of the thesis after 6 months
- Cooperation with supervisors at DLR and your university
• Provided:
- Computer (portable if required), sensors, working material
- Supervision and career prospects
- German lessons
• Financial Terms:
- In total >= 800 EUR/month
- Room costs: about 400 EUR/month
> Alberto Viseras Ruiz • Presentation DLR > 23 January 2015 www.DLR.de • Chart 19

DLR exchange program
- Timeframe:
Research Period:
• At DLR IKN near Munich
• Contract for 6 months
• Mid-term presentation after 3 months
• Final presentation at DLR at the end
of the period
• Regular reports to university’s
supervisor.
• Writing up the final thesis
• Objective is a scientific publication
Pre-Working period:
• Sending of official DLR
application documents
• Application for ERASMUS
programme for practical
trainings
• Thereby acceptance of DLR-
University-exchange rules
• Familiarization guided by
university and DLR tutors
Fine-Tuning:
• Improving
thesis
• Working on
publication
• Submission
in your
university
6 months of Master‘s thesis at DLR
> Alberto Viseras Ruiz • Presentation DLR > 23 January 2015 www.DLR.de • Chart 20

www.DLR.de > Institute of Communications and Navigation > Department Communications Systems > Uwe-Carsten Fiebig et al. > January 2015 > Slide No. 21
Email: [email protected]
Apply until 09.02 !





























