Embed Size (px)
Citation preview

Genetic Algorithms as a Combination of Probabilistic
Solution-Space Decomposition and Randomized Search
Akiko Aizawa
National Center for Science Information Systems, Bunkyo, Japan 112
SUMMARY
In this paper, genetic algorithms are interpreted as a
combination of probabilistic solution-space decomposition
and randomized search. We study a method for charac-
terization of the solution space from this point of view.
Initially, a statistical measure called the variance coefficient
is defined as an index to characterize the solution space.
Next, three parameters that are commonly used to charac-
terize a solution space are expressed in terms of the defined
variance coefficients. The three parameters are the Walsh
coefficient, epistasis variance, and correlation coefficient
between generations. In particular, the generation correla-
tion, which used to be known only empirically as an effec-
tive performance measure for genetic algorithms, is clearly
expressed in terms of the variance coefficients. Based on
the definition, the theoretical values of the generation cor-
relations are compared for representative crossover opera-
tor; namely uniform crossover and one-point crossover. In
addition, the correspondence between the theory and the
performance of actual genetic algorithms are demonstrated
by simple simulation experiments. © 1998 Scripta Tech-
nica, Syst Comp Jpn, 29(5): 1�10, 1998
Key words: Genetic algorithm; adaptive random
search; Walsh analysis; epistasis variance; linear decompo-
sition.
1. Introduction
In this paper, genetic algorithms are interpreted as a
combination of probabilistic solution-space decomposition
and randomized search in that space. A method for charac-
terizing the solution space is studied from this point of view.
The motivation for this study stems from theoretical
research in the field of genetic algorithms, especially the
mathematical approach to an analysis of the complexity of
problems. On the theme of what constitutes an easily solv-
able problem for genetic algorithms, there have been many
discussions in the past. If there is no regularity in the
solution space, any search is nothing more than a simple
random search. Thus, any search algorithm, if it works more
efficiently than a random search, must include some rea-
sonable assumptions about regularity in the structure of the
solution space.
This fitness landscape characterization is the essen-
tial problem in understanding the mathematical principle
and much research has been devoted to various forms, such
as description of the difficulty of genetic algorithms, gen-
eration of deception problems, and schema analysis.
Among previous research, that with the closest relation to
this paper concerns Walsh analysis, epistasis variance, and
correlation analysis between generations.
(1) Walsh analysis
A fitness landscape characterization of the solution
space by Walsh analysis was used originally in Ref. 1, and
later widely introduced to the public by Refs. 2 and 3. Here
the Walsh analysis is a method used to decompose an L-
CCC0882-1666/98/050001-10
© 1998 Scripta Technica
Systems and Computers in Japan, Vol. 29, No. 5, 1998Translated from Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J80-D-II, No. 11, November 1997, pp. 3029�3038
1

dimensional binary signal into 2L independent components.
If L is the bit length of the solution space, intuitively these
2L components represent the different dependency relations
among bits, and the corresponding Walsh coefficient repre-
sents the contribution of this dependence to the entire
evaluation.
The Walsh analysis can represent all dependencies
existing in the solution space, but all solutions need to be
known for the analysis. Thus, it can be applied only to
small-size problems. The results of the analysis represent
only the strength of each dependency relation (micro fea-
tures) and do not evaluate the difficulty of the problem as a
whole (macro features).
(2) Epistasis variance
The epistasis variance is an index proposed in the Ref.
5, which uses the relative magnitude of the nonlinear com-
ponents in the solution space as a measure of the difficulty
of the problem. For this purpose, the linear components are
obtained first under the assumption of bit independence,
and the nonlinear components of each solution are esti-
mated as the difference between the summation of each bit
contribution and the actual evaluation value of each solu-
tion. The epistasis variance is obtained as the sum of the
squares of these errors. Using this method, it is possible to
represent the macro features of a solution space by a simple
statistical measure.
However, since it does not take account of the non-
linear characteristics of genetic algorithms, the epistasis
variance does not necessarily correspond to the difficulty
of the problem and thus is often insufficient as a mathemati-
cal description.
(3) Correlation analysis between generations
In the correlation analysis of generations proposed in
Ref. 6, the similarity of the evaluation values for the parents
and children is adopted as an index of the ease of a problem.
In contrast to the previous two methods, which analyze
static characteristics of the solution space, this method is
used to judge the effectiveness of the genetic operator when
a specific operator is applied to the problem. The method
is effective in expressing the dynamic behavior of a genetic
algorithm by a macro quantity, but on the other hand, its
relation to the analytic method is not clear and values are
obtained only by observing the actual performance of the
genetic operator applied to populations.
Previously, these three methods have been studied
separately and there are few overall discussions. In particu-
lar, the relation between the following two indices is not
clear: the index of the ease of searching the solution space
(Walsh coefficients and epistasis variance) and the index of
the validity of the cross operator (correlation analysis be-
tween generations). In fact the latter is used only empiri-
cally.
In this paper, a method is proposed to characterize the
solution space and search algorithm in terms of the variance
of the evaluation values in the decomposed solution space
[7]. The mutual relations among the above three inde-
pendently proposed indices are clearly understood by rep-
resenting them in terms of the proposed variance
coefficients.
The point of this paper is to provide selective defini-
tion of the hypothesis of the structure of the solution space
according to the applied cross operators. From this point of
view, the difficulty of a genetic algorithm is not defined
absolutely for a given problem, but is defined in terms of a
combination of the coding method and the applied cross
operators, and in terms of the above variance coefficients.
In section 2, the basic concept of the decomposition
of the solution space is described and statistical measures
called variance coefficients are defined.
In section 3, the correspondence between the newly
defined variance coefficients and the conventional solution
space characterization method is described. In section 4, the
theoretical values of the generation correlations of the
uniform and one-point crossover operators are obtained and
compared. In section 5, the generation correlation is calcu-
lated by actually applying a genetic algorithm to some test
problems in order to examine the consistency with the
theoretical results. Finally, in section 6, conclusions are
presented and future issues are described.
2. Linear Decomposition Hypothesis and
Characterization of Solution Space
2.1. Explanation using simple examples
The concept of decomposition of the solution space
is explained by a simple example. Consider the functions
F1, F2, and F3 defined by Table 1 for strings of length 3: x
= x(1) x(2) x(3).
In F1, x(1), x(2), and x(3) are linearly independent. F1
is defined in the following way, by using the functions f(1),
f(2), and f(3) of f(i)(0) = 0, and f(i) = (1) for i = 1, 2, and 3:
In F2, x(1) is linearly independent, but x(2) and x(3) are
not linearly separable. By introducing the new alphabet of
quaternary-valued x(2,3) for x(2) and x(3), x(2,3) = {00, 01, 10,
11}, F2 can be expressed in the form
(1)
(2)
2

where f(2,3)(00) = 0, f(2,3)(01) = 4, f(2,3)(10) = 2, and f(2,3)(11)
= 1. In F3, if we set f(2,3)(00) = 0, f(2,3)(01) = 1, f(2,3)(10) =
1, and f(2,3)(11) = 3, the same definition as Eq. (2) is
possible, but in this case, Eq. (1) is also almost fully
applicable. Introducing an error function G(x) = 0 if x(3) =
0 and G(x) = 1 if x(3) = 1, F3 can be represented as follows:
Here, the performance of the search depends on the
method of decomposition, that is, the construction of sub-
strings as shown in Fig. 1, and if the value of the G(x) in
Eq. (3) is small enough, the bit-wise optimization strategy
is expected to be quite effective.
Looking at the method of characterization of the
solution space in the field of the genetic algorithm, first the
solution space is represented as a linear summation of
substrings such as f(2,3)(x(2,3)), and generally the bit depend-
ency is not included in these relations. That is. the G(x) of
Eq. (3) is used as an index of the difficulty of a genetic
algorithm. What substring (decomposition) should be used
depends on the approach. In the Walsh function analysis,
all possible decompositions are evaluated, but the epistasis
variance evaluates only the linear decompositions.
From the calculation load, there might be another
evaluation method that evaluates only the decomposition
corresponding to orders less than second or third.
In the approach of this paper, the solution space
model represented by Eq. (3) is called the hypothesis of
linear decomposition. In order to determine the reference
bases of search effectiveness, we assume that the hypothesis
to be applied in the search is determined probabilistically
by the selection of crossover points. In the following, the
problem is formalized according to these concepts.
2.2. Basic concepts
For the binary strings x (x = (x(1), . . . , x(L)), x(i) Î
{0,1}), we consider a function F that is a correspondence
between x Î A (= {0,1}L) and the real number R :
The dimension of the solution space is |A| = 2L.
The decomposition or schema template p is defined
by p = p(1), . . . , p(L)), p(i) Î {0,1} is a binary string of
dimension L and decomposes the solution space A into
several independent partial subspaces according to the
value of i that satisfies p(i) = 1.
In this case, p represents the set of schemata that has
* at the position p(i) = 0, and has 0 or 1 at the position p(i)
= 1. In the following, to describe p, we use * for p(i) = 0,
and for p(i) = 1. As an example, p = 0011 is represented as
**.. . Here, the dimension of the decomposition p is the
number of 1s included in p and is denoted by o(p). We set
Np and Np__ as follows:
By definition, p decomposes A into Np subspaces A(p) =
{A0(p), . . . , AN-1
(p) } and the dimension of each space Np__. For
example, for L = 4, the decomposition **.. generates four
subspaces, **00, **01, **10, and **11, and each subspace
contains the four solutions. Concretely for **00, we have
{0000, 0100, 1000, and 1100} (see Fig. 2).
There are 2L kinds of solution space decompositions
by the above method corresponding to each possible value
of p. As a special case, the p(i) = 0 for all positions of bit i
(that is o(p) = 0), p generates only one subspace, which is
A itself. Furthermore, p(i) = 1 for all positions of bit i (that
is, o(p) = L), p generates 2L subspaces, each of which is a
solution.
We next define the simple statistics that are used as
the basic feature in this paper.
Table 1. Example of test functions for 3-bit string x
(3)
Fig. 1. First- and high-order linear decompositions for
3-bit strings.
(4)
(5)
3

The overall mean mA and overall variance sA2 are the
mean and variance over all solutions, defined by
A subspace of A generated by p is denoted by a Î A(p).
The evaluation value of a is defined as the average of all
the evaluation values of the solutions included in a , and is
denoted by ma :
The between variance is the variance of the evaluation
values of the subspaces A0(p), . . . , AN-1
(p) . We denote it by
sB2(p). The within variance is the average of all variances of
each solution in the group on all Ai(p). We denote it by
sW2 (p).
Definition 1. (between variance and within variance)
From Eqs. (7), (9), and (10), the following relation exists
among these variances:
Thus, we always have 0 < sB2(p), sW
2 (p) < sA2 ,
As special cases,
sB2(p) = 0 when p(i) = 0 for all i, and
sB2(p) = sA
2 when p(i) = 1 for all i.
In the following, sB2(p) is called the variance coefficient of
the decomposition p.
2.3. Linear decomposition hypothesis formula
Consider the set P = {p1, . . . , pl} (1 < l < L),
o(pi) > 1 of one or more decompositions, satisfying the
condition,
For all bit positions k, only one decomposition has the value
pi(k) = 1, and {p1, . . . , pi} are orthogonal to each other.
When the solution x is given, x is included in one of
the subspaces A(pi) generated by the pi. This subspace is
denoted by x(pi). For example, for P = {p1, p2}, we have p1
= ..**, p2 = **.., and when x = 1001, for p1 , x(p
i) = 10**,
and for p2, x(p
2) = **01. Here, the LDH (Linear Decompo-
sition Hypothesis) is defined by using P as follows:
Definition 2. (formula of linear decomposition hy-
pothesis)
In Eq. (13), c and f(pi) are defined by
That is, Eq. (13) means assuming l long substrings
(2k1, . . . , 2kl) instead of L bits as the elements of x, and
F(x) is approximated as the linear summation of partial
evaluation functions for these l substrings. G(x) corre-
sponds to the errors of the above linear approximation, and
the strength of mutual dependency among l substrings:
Fig. 2. Decomposition of the solution space.
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
"
"
4

Averaged over the entire solution space, the expected
values of the second and the third terms are as follows:
2.4. Validity standards for the linear
decomposition hypothesis
Many linear decompositions are expressed by Eq.
(13), depending on the selection of the decomposition set
P. In this paper, each selection of P corresponds to a
different hypothesis about the construction of the solution
space. According to this assumption, the subspaces gener-
ated by the p1, . . . , pl are mutually independent, but the
structure in each subspace is unknown. Then for the search
strategy, we apply an independent random search for each
of the l subspaces, and combine the best solutions.
In this case, the evaluation standard for the validity
of a linear decomposition hypothesis is defined in terms of
the relative contributions of the linear components in the
evaluation. This corresponds to the coefficients of determi-
nation in the regression analysis and, from the second term
of Eq. (13), is given by:
Definition 3. (validity standard of linear decompo-
sitions)
By definition, 0 < cod(P) < 1.
If no dependent relations exist among x(p1), . . . , x(p
l),
then G(x) = 0. In particular, for P = {p*, p__
*} with o(p*) =
L, and o(p__
*) = 0, f(p)(x(p
*
)) is equivalent to F(x) itself, and
G(x) = 0. This means that the evaluation function F is
unknown and is equivalent to an extensive search of all
possible solutions.
3. Relations to Existing Solution Space
Characterization Methods
3.1. Walsh function analysis
Let �G� be the order relation between the two strings
of binary numbers. That is, if pi G pj, then o(pi) < o(pj), and
if pi(k) = 1, then pj
(k) = 1. By connecting pairs of nearby order
relations, a Hasse diagram representation of the decompo-
sitions is obtained, as illustrated in Fig. 3.
For a string of length L, a total of 2L nodes and L2L
links exist. The level of the graph corresponds to the order
of p, and the nodes at level k have k links to the upper level
and (L - k) links to the lower level. All nodes have links to
2(l-k) higher nodes and 2k lower nodes. Denoting the Walsh
function in terms of the Paley order by fi [2, 4], the Walsh
coefficients wi (i = 0, . . . , 2L � 1) are
By definition, w0 is the average of the evaluation values of
all strings contained in A:
By applying the Parseval equality,
an important relation between the Walsh coefficients and
the variance coefficient sB2(p) defined in section 2 is intro-
duced.
(16)
(17)
(18)
(19)
(20)
(21)
Fig. 3. Hasse diagram expression of decompositions.
(22)
(23)
(24)
"
5

Relation 1. (relation between Walsh coefficients
and variance coefficients)
Figure 4 shows Relation 1 expressed as a Hasse
diagram. In this figure, L = 4, and each node in the Hasse
diagram corresponds to a decomposition p, and the Walsh
coefficients wi with the same index i of p. As shown by the
figure, the variance coefficient of the decomposition p = . . .*
is the squared sum of the Walsh coefficients of lower rank.
The reason that w02 is special here is that w0 is the average
of all solutions, as shown by Eq. (23), and the variance
coefficient is calculated as the difference from this average
value.
In the above example, the variance coefficient sB2(...*)
is the sum of the degrees of dependency among the bits {1},
{2}, {3}, {1,2}, {2,3}, {3,1}, and {1, 2, 3}. Thus, while the
Walsh coefficients evaluate the individual dependencies
among bits independently, the variance coefficients by
Definition 1 are the sum of the dependencies included in
the string under consideration. The same relation as Eq. (25)
is shown as Eq. (3.11) in Ref. 8.
3.2. Epistasis variance
For the calculation of the epistasis variance, it is
sufficient to consider only one linear decomposition hy-
pothesis that consists of the L independent unit vectors
u1, . . . , uL (if k = i, then ui(k) = 1, and if k ¹ i, then ui
(k) = 0).
The linear decomposition hypothesis of Eq. (13) will then
be
In the defining formula of Ref. 5, by replacing v(S)
with F(x), Ei(a) with f(ui)(x
(ui)) and V with mA, we obtain the
epistasis variance in the form,
The epistasis variance calculates the contribution of
each bit to the entire evaluation and can be expressed by
using the linear decomposition or the primary (first-order)
Walsh coefficients. The same relation between the Walsh
coefficients and the epistasis variance is also derived as
Theorems 1 and 2 of Ref. 9.
3.3. Correlation analysis between generations
The correlation between generations for a given ge-
netic operator op is given by
where P and C are random variables representing the vari-
ance of the distribution of the evaluation values for the
parents and children, s(P) and s(C) are the standard devia-
tions of P and C, respectively, and Cov(P, C) is the covari-
ance.
We assume that the genetic operator is reflexive. That
is, that the statistical distributions of the evaluation values
for parents and children are the same. If we assume that the
selection of the parent is perfectly random,
s(P) = s(C) = sA2 . If we further assume that the selection of
the value of each bit is random (linkage equilibrium), then
E[F(pi)(x
(pi)F(pj
)(x(pj))] = 0.
Under the above assumptions, when the genetic op-
erator is applied to the parent 1, 2, . . . , and the combination
of bits transmitted to a child from parents is represented by
the decomposition pi, then the following simple relation is
introduced. If P = {p1, p2, . . . } is the linear decomposition
hypothesis:
(25)
Fig. 4. Correspondence between variance coefficients
and Walsh coefficients.
(26)
(27)
(28)
(29)
"
"
"
6

Further, assuming that prob(P) is the probability that
the given genetic operation selects the decomposition set
P, we obtain
4. Comparisons of Uniform Crossover and
One-Point Crossover
We now introduce the theory of correlation between
generations on two typical crossover operators: uniform
crossover and one-point crossover. Since the number of
parents of these crossover operators is two, it is sufficient
to consider the set of complementary decompositions P =
{p, p__
}.
4.1. Uniform crossover
In uniform crossover, each bit is selected from either
parent with the probability 1/2 to generate a new child. The
number of ways to select p is 2L, and each has the same
probability 1/(2L). Taking the average over the entire set of
the possible decompositions (p, p__
), the correlation between
generations is given by the following relation:
Relation 3. (correlation between generations in
uniform crossover).
where o(i) is the number of 1s included in the binary
expression of i. Relation 3 is also given in Ref. 10, and by
taking the correspondence of the genetic variance decom-
position to the covariance coefficient of this paper, and of
heritability to the correlation between generations, a mathe-
matically equivalent formula can be obtained. However, in
Ref. 10, additional conditions are imposed based on popu-
lation genetics and the value of each bit x(i) is not restricted
to binary numbers, where the generation probability of each
value of x(i) is considered in the random sampling. Also,
from a practical point of view, Ref. 10 employs an approxi-
mation method in which only the lower-order Walsh coef-
ficients are taken into account, but this is applicable to our
present results also.
4.2. One-point crossover
In one-point crossover, the crossover point k is se-
lected randomly (1 < k < L) and the child receives either
x(i) (i < k) or x(j) (j > k) from one parent and the rest from
the other parent. Using this rule, there are 2L ways to select
p and each has the same probability 1/(2L). Let A1p be the
2L possible decompositions of set P = (p, p__
as shown in
Fig. 5); the correlation between generations of one-point
crossover is then given by the following relation:
Relation 4. (correlation between generations in
one-point crossover)
4.3. Comparisons and discussions
Uniform crossover selects all linear decomposition
hypotheses with equal probability and is robust as a search
method. On the other hand, one-point crossover takes a
weighed selection of the linear decomposition; thus if we
can use suitable coding method, it can use the inner struc-
ture of the solution space more efficiently.
In the above analysis, both for uniform crossover and
for one-point crossover, the value of prob(Pi) is selected
equally after all possible decompositions are listed and the
correlations are calculated. Conversely, if the set P of all
possible decompositions is taken as the probability space,
and if we define the probability on P as prob(Pi) (Pi Î P,
Si prob(Pi) = 1), then prob(Pi) is the general definition of
the crossover operator and corresponds to an expression of
the domain knowledge in the genetic algorithm.
5. Experimental Results
The preconditions for the definition of the correlation
between generations in Eq. (30) no longer hold in the real
genetic algorithm, Also, we have assumed that the size of
the population is large and that the search time is long. Thus,
a simple test function is used to examine the relationships
(30)
(31)
Fig. 5. An LDH set for one-point crossover operator
when L = 5.
(32)
"
"
7
between the calculated values of the correlation between
generations and the performance of the actual genetic algo-
rithm.
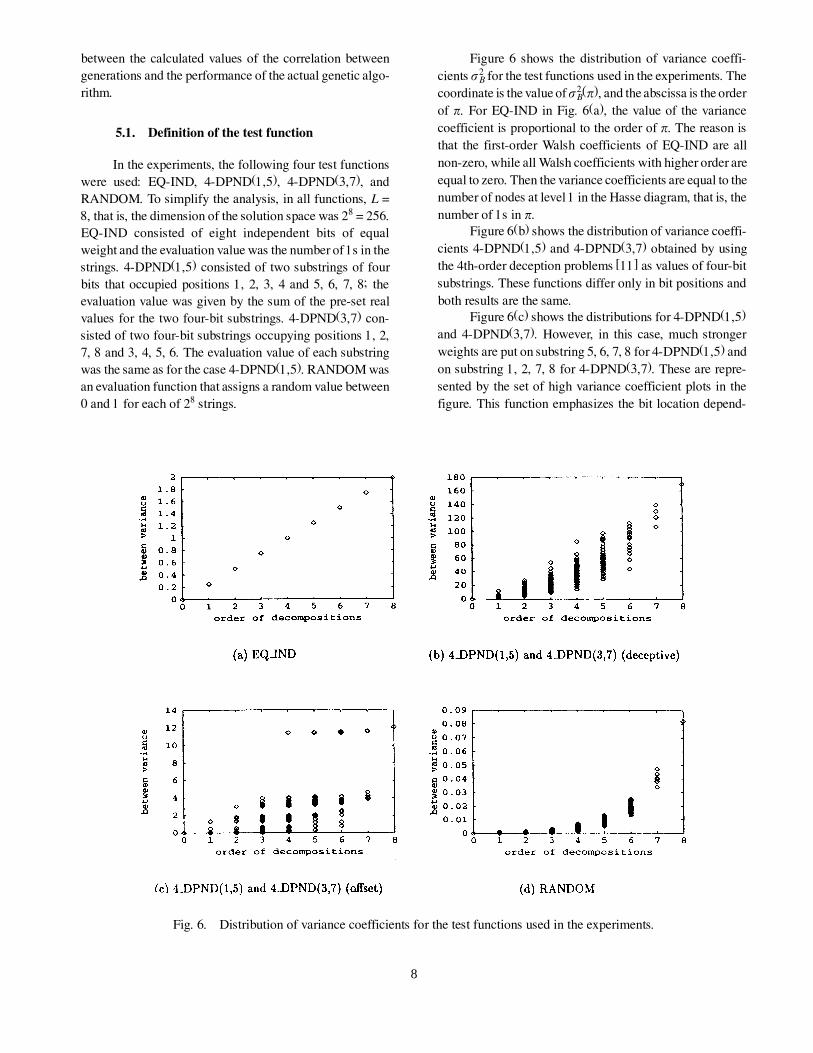
5.1. Definition of the test function
In the experiments, the following four test functions
were used: EQ-IND, 4-DPND(1,5), 4-DPND(3,7), and
RANDOM. To simplify the analysis, in all functions, L =
8, that is, the dimension of the solution space was 28 = 256.
EQ-IND consisted of eight independent bits of equal
weight and the evaluation value was the number of 1s in the
strings. 4-DPND(1,5) consisted of two substrings of four
bits that occupied positions 1, 2, 3, 4 and 5, 6, 7, 8; the
evaluation value was given by the sum of the pre-set real
values for the two four-bit substrings. 4-DPND(3,7) con-
sisted of two four-bit substrings occupying positions 1, 2,
7, 8 and 3, 4, 5, 6. The evaluation value of each substring
was the same as for the case 4-DPND(1,5). RANDOM was
an evaluation function that assigns a random value between
0 and 1 for each of 28 strings.
Figure 6 shows the distribution of variance coeffi-
cients sB2 for the test functions used in the experiments. The
coordinate is the value of sB2(p), and the abscissa is the order
of p. For EQ-IND in Fig. 6(a), the value of the variance
coefficient is proportional to the order of p. The reason is
that the first-order Walsh coefficients of EQ-IND are all
non-zero, while all Walsh coefficients with higher order are
equal to zero. Then the variance coefficients are equal to the
number of nodes at level 1 in the Hasse diagram, that is, the
number of 1s in p.
Figure 6(b) shows the distribution of variance coeffi-
cients 4-DPND(1,5) and 4-DPND(3,7) obtained by using
the 4th-order deception problems [11] as values of four-bit
substrings. These functions differ only in bit positions and
both results are the same.
Figure 6(c) shows the distributions for 4-DPND(1,5)
and 4-DPND(3,7). However, in this case, much stronger
weights are put on substring 5, 6, 7, 8 for 4-DPND(1,5) and
on substring 1, 2, 7, 8 for 4-DPND(3,7). These are repre-
sented by the set of high variance coefficient plots in the
figure. This function emphasizes the bit location depend-
Fig. 6. Distribution of variance coefficients for the test functions used in the experiments.
8
encies and is used to examine the differences of the one-
point crossover between 4-DPND(1,5) and 4-DPND(3,7).
Figure 6(d) shows the result obtained for RANDOM.
The Walsh coefficients are distributed uniformly and ran-
domly, and the value of the variance coefficient is propor-
tional to the total number of nodes with lower order that is
2o(p) - 1.
5.2. Simulation results
The correlation between generations given by Eqs.
(31) and (32), and the results of the simulation for simple
genetic algorithm, are shown in Table 2 for the test function
defined above.
In the table, the upper lines are the simulation results
and the lower lines are calculated values. In the simulation,
the crossover rate was 0.6, the mutation rate was 0.01, the
population size was 40, and the generational but elitist
strategy was applied. Consider that the test problem is
small, the simulations are continued for 20 generations, and
the best individual in the final population was selected as
the result. The data shown in the table is the average of 500
simulations. For comparison purposes, the best solution
obtained assuming bit independence is also shown. The
correlation coefficient rg is the genetic variance defined in
Ref. 9, given by rg = (sA2 - se
2) /sA2 where se is the epistasis
variance. Since EQ-IND is a linear problem, the value of
generation correlation is equal to 1 in each case and the
simulation result gives the optimal value.
For 4-DPND, where a dependency exists among bits,
ru and r1p are larger than rg. Also, ru and r1p are location-
independent while r1p depends on the bit location for
4-DPND(1,5) (offset), r1p > ru, and for 4-DPND(3,7) (off-
set), r1p < ru. As is expected from the above analysis, the
simulation results show that one-point crossover performs
better than uniform crossover for 4-DPND(1,5) (offset)
while uniform crossover performs better for 4-DPND(2,7).
The bitwise optimization method falls into a local optimum.
Finally, in RANDOM, there is no regularity in the solution
space, and no definite differences of performance are ob-
served for all cases.
In order to clarify the meaning of the variance coef-
ficients, the performance of a newly defined adaptive cross-
over is also shown in the table. In the adaptive crossover
method, validities are first evaluated for all decompositions
P = (p, p__
), then the top 2L decompositions are selected to
be used in location crossover operation. This crossover
method is location independent and the correlation (ra)
between generations is definitely larger than in the other
crossover methods. As expected, adaptive crossover gives
better results than the other methods.
Finally, our experiments using the various evaluation
functions show that one-point crossover is more advanta-
geous than uniform crossover if the weights of all substrings
are selected equally and randomly. The reason may be that
the low-order schema plays an important role in the test
functions selected in this way. Since one-point crossover
selects two decompositions for each order, it tends to put
more weight on lower-order schemata.
As conclusions, the above experimental results show
a good correspondence between the proposed analysis
method and actual genetic algorithm behavior.
6. Conclusions
In this paper, we treat a genetic algorithm as a com-
bination of probabilistic linear decomposition of the solu-
tion space and randomized search in that space, instead of
using the conventional biological view. We focus on the
analytical aspect of the problem, but Refs. 12 and 13
actually formalize a partitioned randomized search strategy.
Table 2. Analytical correlation coefficients and GA performance
9

These methods employ sequential decision theory
and at each step of the search, the action for the next step is
determined so that the decision is statistically optimized.
The methods exploit past observations at the maximum, but
the amount of data management and calculation is large and
the method itself becomes complex.
According to the viewpoint of this paper, genetic
algorithms avoid such complex calculations, but select the
next search action (linear decomposition hypothesis) with
a certain pre-determined probability. The efficiency of the
search inevitably depends on the coding method and the
design of genetic operators, but the strategy itself becomes
simple.
REFERENCES
1. A.D. Bethke. Genetic Algorithms as Function Op-
timizers. Doctorial Dissertation, University of Michi-
gan (1981).
2. D.E. Goldberg. Genetic algorithms and Walsh func-
tions: Part I, a gentle introduction. Complex Systems,
3, pp. 129�152 (1989).
3. D.E. Goldberg. Genetic algorithms and Walsh func-
tions: Part II, deception and its analysis. Complex
Systems, 3, pp. 153�171 (1989).
4. Y. Endo. Walsh Analysis. Tokyo Denkidaigaku Publ.
(1993). (in Japanese)
5. Y. Davidor. Epistasis variance: A viewpoint on GA-
hardness. Foundations of Genetic Algorithms, pp.
23�35 (1991).
6. B. Manderic, M. DeWeger, and P. Spiessens. The
genetic algorithm and the structure of the fitness
landscape. Proceedings of the 4th International Con-
ference on Genetic Algorithms, pp. 143�150 (1991).
7. A. Aizawa. Fitness landscape characterization by
variance of decompositions. Foundation of Genetic
Algorithms 4, eds., R.K. Belew and M.D. Vose, pp.
225�245 (1997).
8. M. Rudnic and D.E. Goldberg. Signal, noise, and
genetic algorithms. IlliGAL Report, No. 91005
(1991).
9. M. Manela and J.A. Campbell. Harmonic analysis,
epistasis and genetic algorithms. Parallel Problem
Solving from Nature 2, eds., R. Männer and B. Man-
derick. Elsevier Science Publishers, pp. 57�64
(1992).
10. H. Asoh and H. Mühlenbein. Estimating the herita-
bility by decomposing the genetic variance. Parallel
Problem Solving from Nature, 3, eds., Y. Davidor,
H.P. Schwefel, and R. Männer. Elsevier Science Pub-
lishers, pp. 98�107 (1994).
11. L.D. Whitley. Fundamental principles of deception in
genetic search. Foundations of Genetic Algorithms,
ed., G.J.E. Rawlins. Morgan Kaufmann Publisher,
pp. 221�241 (1991).
12. Z.B. Tang. Adaptive partitioned random search to
global optimization. IEEE Transactions on Automat-
ic Control, 39, No. 11, pp. 2235�2244 (Nov. 1994).
13. C.C. Peck and A.P. Dhawan. Genetic algorithms as
global random search methods: An alternative per-
spective. Evolutionary Computation, 3, No. 1, pp.
39�80 (1995).
AUTHOR
Akiko Aizawa (member) received her B.Eng. and D.Eng. degrees from the University of Tokyo in 1985 and 1990. She
was a Visiting Scholar at University of Illinois from 1990�1992. She is now an associate professor at the National Center for
Information Systems. Research on knowledge engineering and communication network engineering.
10


















![Probabilistic Streaming Tensor Decompositionzhe/pdf/POST.pdf · Probabilistic Streaming Tensor Decomposition Yishuai Du y, Yimin Zheng , Kuang-chih Lee], Shandian Zhey University](https://img.dokumen.tips/doc/110x75/5eb6be1e3d209031916fd245/probabilistic-streaming-tensor-decomposition-zhepdfpostpdf-probabilistic-streaming.jpg)









