Embed Size (px)
Citation preview

1
Lecture 5:Fundamentals of Solid Mechanics for
Packaging Applications
Sören Östlund
After Lecture 5 you should be able to
• discuss the mechanical behaviour of packaging materials, particularly paper and board, in terms of thematerials, particularly paper and board, in terms of the most important types of concepts used in solid mechanics.

2
SOLID MECHANICSEquations relating field Variables
• Equations of Motion (Equilibrium)Equations of Motion (Equilibrium)– Relating external forces to internal forces (stresses) in the
material
• Strain-Displacement Relations (Compatibility)– Relates deformation with strain
C tit ti (St St i ) R l ti• Constitutive (Stress-Strain) Relations– Relates stresses to strains
(More challenging, different equations often used for various problems - even for the same material)
THE CONCEPT OF STRESSTHE CONCEPT OF STRESS

3
STRESSSectioning plane through loaded body
Loaded body
P n
Sectioning plane through point of interest P
STRESSInternal forces on exposed surface
Di t ib ti f i t l f i d f ilib iDistribution of internal forces required for equilibrium
P
RF
P
RM
The stress at point P is the internal force per unit area(internal force intensity) at point P

4
STRESSDefinition - Arbitrary plane
Stress Vector
P
ΔFnS
nFΔ
tFΔnσ
nτ
n
t n n n0limA A
σ τΔ →
Δ= = +
ΔFS n t
Stress Vector
Stress Components (Cauchy)
nli FΔ
AΔ
nn 0
limA
σAΔ →
=Δ
tn 0
limA
FτAΔ →
Δ=
Δ
Normal Stress:
Shear Stress:
STRESSDiscussion of definition
• Stress is a point quantity - evaluated in the limit as the area approaches zero size
• Historically, stress vectors are resolved into normal and shear componentsbecause:
– They cause different types of localized deformations (strains) in most materials (normal stresses are typically related to length changes and shear stresses are typically related to angular changes)
– They have different influences on material failure in various materials
• The stress components will depend on the normal to the sectioning plane• The stress components will depend on the normal to the sectioning plane chosen at the point

5
STRESSDefinition for the coordinate axis planes
Stress componentsFor example, pick the plane with: 1ˆn e=
111 0
limA
FA
σΔ →
Δ=
ΔNormal stress:
Shear stresses: 212 0
limA
FA
σΔ →
Δ=
Δ
3lim Fσ Δ=
ΔF
n 1F FΔ = Δ1x
2x
2FΔ
Δ
tFΔ
p , p p 1
ˆn e 13 0limA A
σΔ →
=ΔP
AΔ3x
3FΔ1n e=
STRESSNotation for the coordinate axis planes
2x Using Newton’s 2nd Lawfor rotational Motion,it b d th t
22σ
1x3x
it can be proved that:
12 21
13 31
23 32
σ σσ σσ σ
==
=32σ
31σ
23σ21σ
13σ
12σ
11σ
11 12 13 11 12 13
21 22 23 12 22 23
31 32 33 13 23 33
σ σ σ σ σ σσ σ σ σ σ σσ σ σ σ σ σ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
σNormal stress signs:Positive = TensionNegative = Compression
33σ31
Symmetric 2nd order component matrix:

6
STRESSPlane Stress States
A point is in a state of plane stress if one of the three coordinate planes is stress free
22σ
12σ
22σ
12σ
33 31 32 0σ σ σ= = =
13 23 0σ σ→ = =
12σ
11σ
12σ
11σ
STRESSTransformation equations (2D)
Jämvikt ger:
( )
( )
2 2cos sin 2 sin cos
sin 2 cos 22
x y xy
y xxy
σ ϕ σ ϕ σ ϕ τ ϕ ϕ
σ στ ϕ ϕ τ ϕ
= + +
−= +

7
STRESSPrincipal stresses
Considering all directions, the maximum and minimum normal stresses at a point (and their associated directions) can be
11 12 13
12 22 23
13 23 33
σ σ σσ σ σσ σ σ
⎡ ⎤⎢ ⎥=⎢ ⎥⎣ ⎦
σ
stresses at a point (and their associated directions) can be found by finding the eigenvalues and eigenvectors of the symmetric 3 x 3 matrix of stress components:
13
max minmax 2abs
σ στ −
−=
The maximum shear stress at point can be found from the maximum and minimum normal stresses at the point:
SOLID MECHANICSEquations of motion
2∂∂ ∂ ∂
m=∑F a2
1311 12 11 1 2
1 2 32
2312 22 22 2 2
1 2 32
13 23 33 3
uf ax x x t
uf ax x x t
uf a
σσ σ ρ ρ
σσ σ ρ ρ
σ σ σ ρ ρ
∂∂ ∂ ∂+ + + = =
∂ ∂ ∂ ∂
∂∂ ∂ ∂+ + + = =
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂+ + + = =
12 21
13 31
23 32
σ σσ σσ σ
===
Reminder
3 3 21 2 3
f ax x x t
ρ ρ+ + + = =∂ ∂ ∂ ∂
321 f,f,f are body force components per unit volume
321 a,a,a are the acceleration components of the point

8
THE CONCEPT OF STRAINTHE CONCEPT OF STRAIN
STRAINDefinition - "Engineering” Strain
Deformed body 2s′Δ
θP′
2x
Undeformed body
P
P′1s′Δ
3s′Δ
12θ23θ
13θ
P′
1x
3x
3e1e
2e
1sΔ
2sΔ
3sΔ
P

9
STRAINDefinition - "Engineering” Strain
Normal strains
2s′Δ
12θ23θP′
1sΔ
2sΔ
3sΔ
P1
1 111 0
1
lims
s ss
εΔ →
⎡ ⎤′Δ − Δ= ⎢ ⎥Δ⎣ ⎦
2
2 222 0
2
lims
s ss
εΔ →
⎡ ⎤′Δ − Δ= ⎢ ⎥Δ⎣ ⎦
s s⎡ ⎤′Δ Δ1s′Δ
3s′Δ 13θ
Normal strain = Change in length divided by original lengthfor an infinitesimal line segment at a point
3
3 333 0
3
lims
s ss
εΔ →
⎡ ⎤Δ −Δ= ⎢ ⎥Δ⎣ ⎦
STRAINDefinition - "Engineering” Strain
Shear strains
1 212 12 12, 0
2 lim2s s
πε γ θΔ Δ →
⎡ ⎤≡ = −⎢ ⎥⎣ ⎦
1 313 13 13, 0
2 lim2s s
πε γ θΔ Δ →
⎡ ⎤≡ = −⎢ ⎥⎣ ⎦
23 23 232 lim πε γ θ⎡ ⎤≡ = −⎢ ⎥⎣ ⎦
2s′Δ
12θ23θP′
1sΔ
2sΔ
3sΔ
P
Shear strain = Change in angle of an originally orthogonal set ofdirections at a point
2 323 23 23, 0 2s s
γΔ Δ → ⎢ ⎥⎣ ⎦ 1s′Δ
3s′Δ 13θ

10
STRAINNormal strain in x-direction
x x+Δxx x+Δx
( )xu x ( )xu x x+ Δ( )x
( ) ( )( ) ( )x x xx
u x x u x dux xx dx
ε + Δ −= =
Δ
SOLID MECHANICSStrain-Displacement Relations
For small strains, we can use the linearized version of thestrain-displacement equations and the engineering strain components:
111
1
ux
ε ∂=∂
2 112 12
1 2
2 u ux x
ε γ ∂ ∂= = +
∂ ∂
12
jiij
j i
uux x
ε⎡ ⎤∂∂
= +⎢ ⎥∂ ∂⎢ ⎥⎣ ⎦
222
2
333
3
uxux
ε
ε
∂=∂∂
=∂
1 2
3113 13
3 1
3223 23
3 2
2
2
uux x
uux x
ε γ
ε γ
∂∂= = +
∂ ∂∂∂
= = +∂ ∂

11
STRAINPrincipal strains
Considering all directions, the maximum and minimum normal strains at a point (and their associated directions) can be
11 12 13
12 22 23
13 23 33
ε ε εε ε εε ε ε
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
ε
strains at a point (and their associated directions) can be found by finding the eigenvalues and eigenvectors of the symmetric 3 x 3 matrix of strain components:
max max minabsγ ε ε− = −
The maximum shear strain at point can be found from the maximum and minimum normal strains at the point:
CONSTITUTIVE EQUATIONSCONSTITUTIVE EQUATIONS
12
CONSTITUTIVE MODELSGeneral Comments
• Constitutive equations describe the macroscopic behaviour resulting from the internal constitution of thebehaviour resulting from the internal constitution of the material.
• Often they are phenomenological / empirical in that they represent the observed phenomena without understanding the underlying details from which they result (curve fits).
• In solid mechanics, the constitutive relations are typically stress-strain relations.
We Need Some Experimental Data!!
CONSTITUTIVE MODELSApproaches for Development
• It is not feasible to write down one equation or one set of equations that accurately models a realset of equations that accurately models a real material over its entire range of behaviour.
• Typically, separate theories are formulated for various kinds of ideal material response. Each formulation is designed to approximate physical observations of the response of a material over a
it bl f b h isuitable range of behaviour.
13
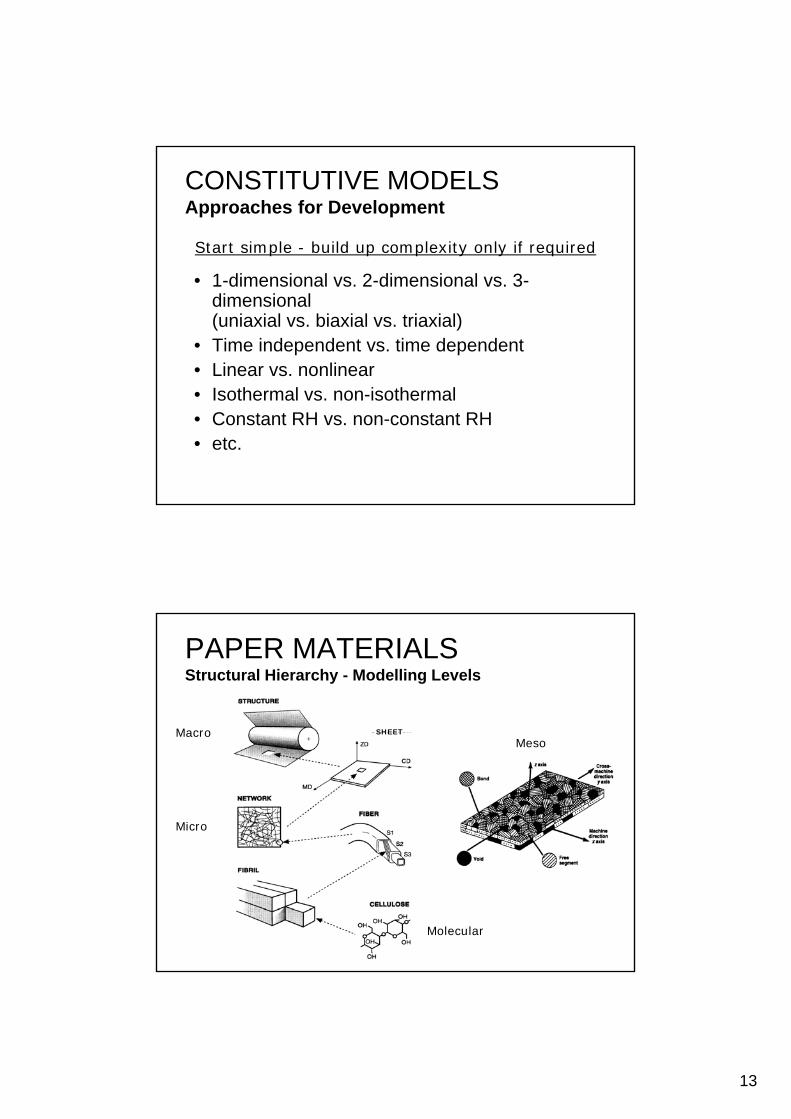
CONSTITUTIVE MODELSApproaches for Development
Start simple - build up complexity only if required
• 1-dimensional vs. 2-dimensional vs. 3-dimensional(uniaxial vs. biaxial vs. triaxial)
• Time independent vs. time dependent• Linear vs. nonlinear• Isothermal vs. non-isothermal• Constant RH vs. non-constant RH• etc.
PAPER MATERIALSStructural Hierarchy - Modelling Levels
SHEETMacro SHEETMacro
Micro
Meso
Molecular

14
SOLID MECHANICSTypes of constitutive (stress-strain) relations
• Elastic– The material is like a spring - all deformations arep g
recovered when the loading is removed• Plastic
– Permanent deformations occur which are non-recoverable• Elastic-plastic
– The material is first elastic, and then elastic-plastic• Viscoelastic
– The material experiences elastic and viscous (time dependent) deformations
• Viscoplastic– Combines viscoelastic and plastic behaviors
• Continuum damage– Considers development of damage in the structure
CONSTITUTIVE MODELSMaterial Characterization Experiments
U i i l t i d/ i t t
Basic experiments (application of uniform stress/strain)
• Uniaxial tension and/or compression test• Pure shear test (not necessarily so-basic)• Creep test• Stress relaxation test• Cyclic uniaxial testing
• Bending tests (non-uniform stress / strain)• Biaxial tests (hard to do)
Not-so-basic experiments

15
BASIC MEASUREMENTS BASIC MEASUREMENTS (STIFFNESS, STRENGTH, etc.)
UNIAXIAL TESTINGSpecimen Geometry and Loading
Unloaded Specimen b
Loaded Specimen
Lt
tbA =
b′ PP
3x
1x2x
Assume uniform deformations in the loaded specimen
L′
PPt′
tbA ′′=′

16
UNIAXIAL TESTINGTension and Compression
• Tests are normally run in either displacement (stroke) control or load controlcontrol or load control– Displacement control: The cross-heads which hold the specimen
grips separate at a constant rate. Thus the axial strain in the specimens changes at a constant rate.
– Load control: The load applied to the specimen is increased at a constant rate.
• Typically the load on the specimen is monitored with a
1C tε =
2C tσ =y y
load cell (force transducer) and the relative motion of the cross-heads is monitored (change in length of the specimen).
UNIAXIAL TESTINGAxial Stress
PF =P
P
tbA ′′=′
AP
AP≈′
=11σ
Average axial stress
Engineering
The stress is assumed to be uniformly distributed over the cross-sectional area
3x
True stressstress
3
1x2x
AP
=11σ
P P
3x
1x2x
At any point in the specimen:

17
UNIAXIAL TESTINGDeformations and Strains
3x
1x
LLL −′=Δ≡δ
LLL
LLL δε =
Δ=
−′=11
Average axial strain
12x
Extension
LLL
bb
bbb Δ=
−′=22ε
Average transverse strains
tt
ttt Δ=
−′=33ε
PAPERTypical Load vs. Extension Data
P
PuFracture
P,Load k
Linear Region
δ,Extension uδ
δkP =
P

18
PAPERTypical Axial Stress vs. Axial Strain Data
Stress-strain curve
AP
=σ
Ultimate strength
Proportional limit,or yield Stress
In the linear region
εσ E=
δ⎟⎞⎜⎛=
AEP
LE
AP δ=
Lδε =
Ultimate strain
E, Elastic modulus = Young’s modulusδ⎟⎠
⎜⎝
=L
P
LAEk =
1
PAPERPoisson’s Ratio Data
3x
1x2x LL
LL
LL δε =Δ
=−′
=11
= Poisson s ratioν2 LLL
22ε
se S
trai
n
bb
bbb Δ=
−′=22ε
1122 ενε −=
In the linear region
11ε
Axial Strain
Tran
sver
s
From the stress-strain curve
1111 εσ E=This gives:
E11
22σνε −=

19
PAPERAnisotropic (Orthotropic) Material Behavior
θ
CD
Specimen Orientation
θ
θ
MD
PAPERStress-Strain Curve - Plasticity Effects
Elastic-plastic behaviorIf the stress becomes higher thanthe yield stress (the stress-straincurve becomes nonlinear), permanentstrains are obtained when unloadingthe specimen. The unloading curveand reloading curves are essentiallyparallel to the initial linear response.
σYσ

20
PAPERStress-Strain Curve – Rate Dependent Behaviour
Variation of the stress-strain curve with extension-rate
PAPERThickness Variation
t

21
PAPERThickness Measurement
• Since the thickness is variable, an average value is typically used in the stress calculations for theis typically used in the stress calculations for the basic experimental tests (uniaxial testing and shear testing in torsion)
• In some laboratories, the “stress” in a stress-strain curve is calculated in units of force per unit width instead of force per unit areawidth instead of force per unit area.
btP
AP==σ
bPb =σ
Stress Force per unit width
PAPERSpecific stress
P P
Stress
A btσ = =
b Pb
σ =
Force per unit width
bw t P
w w bw wt
σ σ σ σσρ
= = = = =⎛ ⎞⎜ ⎟⎝ ⎠
Specific stress
w = grammage /basis weight

22
TENSIONNotation for Paper Elastic Moduli
Coordinate axis convention(for paper, wood, composites)
1E
2E MDx =1 CDx =2
ZDx =3
ZD
CD
MD
EEEEEE
≡≡≡
3
2
1
Typical stress-strain curve for a 150 g/m2 fluting

23
Typical stress-strain curve for a 180 g/m2 liner
Paperboard
MD
45o
CD
MD -shear
CD -shear
ZD

24
Load-strain curvesSack paper and newsprint
Sack paper
Newsprint
Nordman (1969)
TENSIONTypical Effects of Moisture Content

25
TENSIONTypical Effects of Temperature
COMPRESSIONComparison of tensile and compressive curves
There is no widely used method in industry for evaluating the compres-sive stress-strain curve or compressive elastic modulus (buckling problem)
1. The elastic modulus isconstant through theconstant through theorigin.
2. Compressive strengthsare much less thantensile strengths.
26
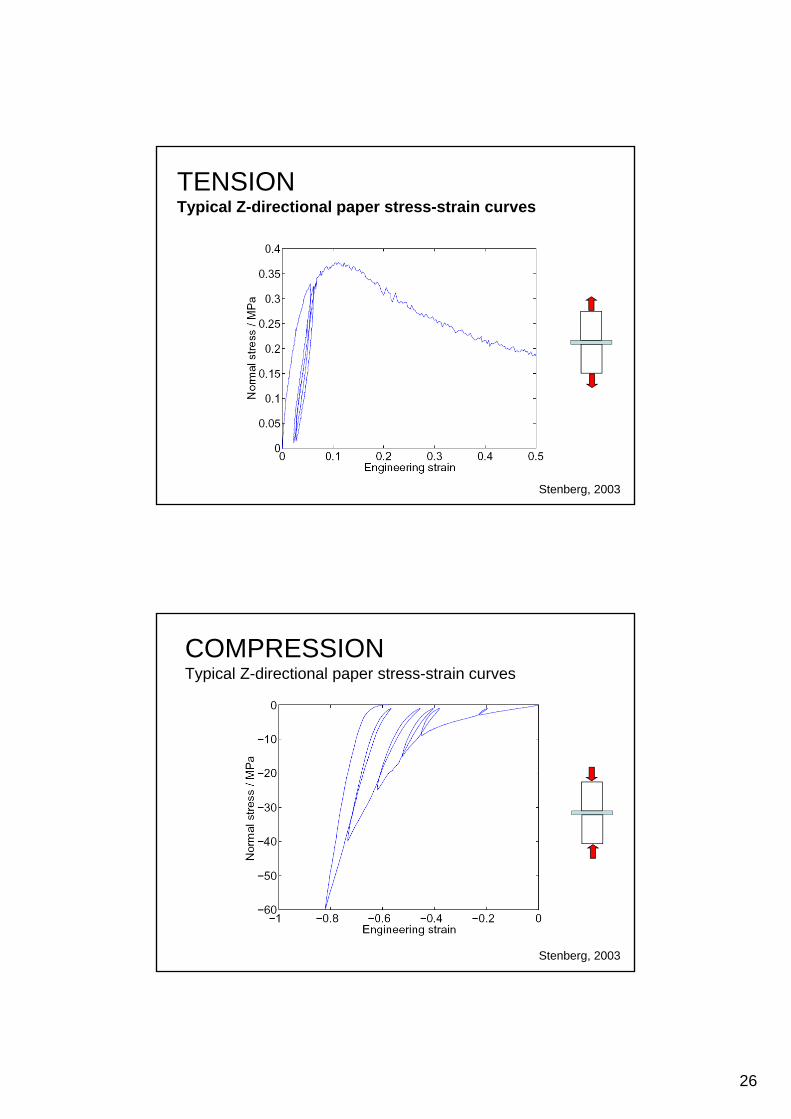
TENSIONTypical Z-directional paper stress-strain curves
Stenberg, 2003
COMPRESSIONTypical Z-directional paper stress-strain curves
Stenberg, 2003

27
SHEAR TESTINGMethods
Stress strain curves
Research approaches ( Still VERY little in industry)
• Stress-strain curves– Torsion of paper cylinders– Arcan test– Rail shear (interlaminar)– Double Notch Shear
• Initial shear modulus
Pure shear (linear region)
γτ G=
• Initial shear modulus– Torsion pendulum– Off-axis tensile test– Ultrasonics
BENDING

28
BENDINGInternal forces and moments in a beam
PP
F = Axial forceP T
F T = Shear forceM = Bending moment
0=∑F0F
T PM Px
===
FMx
BENDINGTypical paper failure in bending

29
BENDINGTheory assumption
“Plane sections remain plane”
A section in pure bending deformsapproximately into a circular arc.
BENDINGTheory
Small element in pure bending
Cross-sectional area
L
x
yz
tb
yz
p g

30
BENDINGTheory
z
x
y
R
From geometrical considerations:
Rz
xx =ε
Assuming linear elastic behavior:
RzEE x
xxxxx == εσ
Assuming linear elastic behavior:
R = radius of curvature of the deformed beam
σ
εE
BENDINGTheory
Cross-sectional area
Using equilibrium arguments
yyx IEM
R==
1κt
b
yCombining:
Mzz
3
121 btI yy =
Area moment of inertiaIEx
xx =ε
IMz
xx =σ

31
BENDINGNon-uniform stress and strain distributions
BENDINGConcept of bending stiffness
⎞⎛ 1 Eκyyxyyx IE
RIEM =⎟
⎠⎞
⎜⎝⎛=
1 3" "12
xx yy
ES EI E I bt≡ = =
Is called the bending stiffness of thebeam and it is the slope of the momentvs. curvature relation.
B di iff i id h
3
12tE
bSS x
b =≡
Bending stiffness per unit width
32
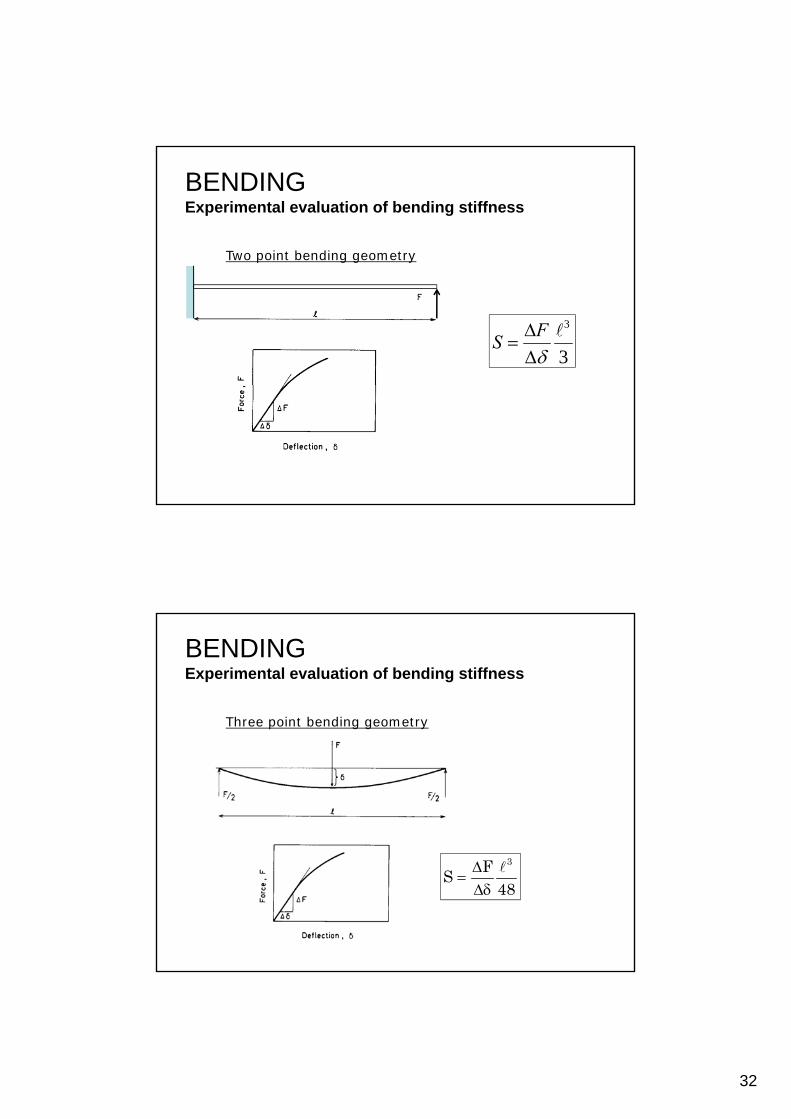
BENDINGExperimental evaluation of bending stiffness
Two point bending geometry
3
3FSδ
Δ=Δ
BENDINGExperimental evaluation of bending stiffness
Three point bending geometry
48FS
3
δΔΔ
=

33
BENDINGExperimental Evaluation of Bending Stiffness
Four point bending geometry
16FS
221
δΔΔ
=
BENDINGExperimental Evaluation of Bending Stiffness
C til b b di ib ti t
242 tf4 ρπ
Cantilever beam bending vibration geometry
66
4)875.1(tf4S ρπ
=

34
Torsion
TLk
θ =k
k = GK for an isotropic material, where G is the shear modulus and K depends on the geometry of the cross-section.
PAPER LINEAR ELASTICITY

35
ELASTICITYGeneral Linear Elastic Stress-Strain Relations
11 12 13 14 15 1611 11 S S S S S Sε ε ⎡⎧ ⎫ ⎧ ⎫ 11σ⎤ ⎧ ⎫11 12 13 14 15 1611 11
21 22 23 24 25 2622 22
31 32 33 34 35 3633 33
41 42 43 44 45 4613 13
51 52 53 54 55 5623 23
222
S S S S S SS S S S S SS S S S S SS S S S S SS S S S S SS S S S S S
ε εε εε εγ εγ εγ ε
⎡⎧ ⎫ ⎧ ⎫⎢⎪ ⎪ ⎪ ⎪⎢⎪ ⎪ ⎪ ⎪⎢⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪= = ⎢⎨ ⎬ ⎨ ⎬⎢⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎣
11
22
33
13
23
σσσσσσ
⎤ ⎧ ⎫⎥ ⎪ ⎪⎥ ⎪ ⎪⎥ ⎪ ⎪⎪ ⎪⎥ ⎨ ⎬⎥ ⎪ ⎪
⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎩ ⎭⎦61 62 63 64 65 6612 122 S S S S S Sγ ε⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎣ 12σ⎢ ⎥ ⎪ ⎪⎩ ⎭⎦
are the compliance coefficients (material properties)that must be determined by experimental testing
ijS
ELASTICITYElastic Constants for Orthotropic Materials
MD uniaxial testing (theory)
11 12 1311 11
12 22 2322
13 23 3333
4413
5523
6612
0 0 00 0 0 00 0 0 0
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
S S SS S SS S S
SS
S
ε σεεγγγ
⎡ ⎤⎧ ⎫ ⎧ ⎫⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎪ ⎪ = ⎢ ⎥⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎩ ⎭⎩ ⎭ ⎣ ⎦
11 11 11
22 12 11
33 13 11
13 23 12 0
SSS
ε σε σε σγ γ γ
===
= = =
C i t t f ti b dComparing our two sets of equations basedon experimental data and theory gives:
111
1SE
= 1212
1
SEν
= − 1313
1
SEν
= −

36
ELASTICITYElastic Constants for Orthotropic Materials
Stress-strain relations for orthotropic material( li ffi i t i t f t i l t t )(compliance coefficients in terms of material constants)
2 CDx =
1 MDx =
1312
1 1 1
2321
11 112 2 2
22 2231 32
3 3 333 33
1 0 0 0
1 0 0 0
1 0 0 0
E E E
E E E
E E E
νν
ννε σε σν νε σ
⎡ ⎤− −⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎧ ⎫ ⎧ ⎫⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪− −⎢ ⎥⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥=⎨ ⎬ ⎨ ⎬⎢ ⎥ 3 ZDx =13 13
1323 23
12 12
23
12
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
G
G
G
γ σγ σγ σ
=⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
ELASTICITYSimplifications for Plane Stress
3 ZDx =
CD For plane stress in the plane of2 CDx =
1 MDx =
For plane stress in the plane ofthe paper sheet:
33 13 23 0σ σ σ= = =
1312
1 1 1
2321
11 112 2 2
1 0 0 0
1 0 0 0
1
E E E
E E E
νν
ννε σε σν ν
⎡ ⎤− −⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎧ ⎫ ⎧ ⎫⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪22 2231 32
3 3 333
13
1323
12 12
23
12
1 0 0 00010 0 0 0 00
10 0 0 0 0
10 0 0 0 0
E E E
G
G
G
ε σν νεγγγ σ
⎢ ⎥⎪ ⎪ ⎪ ⎪− −⎢ ⎥⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥=⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦

37
ELASTICITYSimplifications for Plane Stress
( )1 == 2313 0γγ
In-plane relations Out-of-plane relations
( )
( )
11 11 12 221
22 22 21 112
1212 12
12
1
1
2
E
E
G
ε σ ν σ
ε σ ν σ
σγ ε
= −
= −
= =
⎟⎟⎠
⎞⎜⎜⎝
⎛+−= 22
2
2311
1
1333
2313 0
σνσνε
γγ
EE
⎫⎧⎥⎥⎤
⎢⎢⎡
−⎫⎧ 111
12
111
01
σ
ν
ε EE
“Through the thickness strain”
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥
⎦⎢⎢⎢⎢⎢⎢
⎣
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
12
22
11
12
22
21
11
12
22
11
100
01
σσσ
ν
γεε
G
EE
Note that only 4 material constants are required:⎟⎟⎠
⎞⎜⎜⎝
⎛= 12
1
221
121221 ,,,
νν
ν
EE
GEE
Elastic Boundary Value Problem (3D)Partial differential equations
12
131211 uf ∂+
∂+
∂+
∂ ρσσσEquations of motion Stress-strain relations
⎥⎤
⎢⎡ −− 1312 0001 νν
23
2
33
33
2
23
1
13
22
2
23
23
2
22
1
12
21
13
13
2
12
1
11
tuf
xxx
tuf
xxx
tf
xxx
∂∂
=+∂∂
+∂∂
+∂∂
∂∂
=+∂∂
+∂∂
+∂∂
∂=+
∂+
∂+
∂
ρσσσ
ρσσσ
ρ
∂∂
Strain-displacement relations ⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
12
23
13
33
22
11
23
13
33
32
3
31
2
23
22
21
111
12
23
13
33
22
11
1
010000
001000
0001
0001
000
σσσσσσ
νν
νν
γγγεεε
G
G
EEE
EEE
EEE
3
333
2
222
1
111
xuxuxu
∂∂
=ε
∂∂
=ε
∂∂
=ε
2
3
3
223
1
3
3
113
2
1
1
212
xu
xu
xu
xu
xu
xu
∂∂
+∂∂
=
∂∂
+∂∂
=
∂∂
+∂∂
=
γ
γ
γ
2 CDx =
1 MDx =
3 ZDx =
⎥⎥⎥
⎦⎢⎢⎢
⎣ 12
100000G
+ Boundary conditions!

38
PAPER VISCOELASTICITY
VISCOELASTICITYDefinition
• Viscoelastic response combines material behavior of an elastic solid and a viscous fluidsolid and a viscous fluid
• Thus, a viscoelastic material is characterized by a certain level of rigidity of an elastic solid body, but at the same time it flows and dissipates energy by frictional losses like a viscous fluid
• Viscoelasticity is part of the science of rheology - the study of time dependent material behavior
• Basic viscoelastic phenomena:Basic viscoelastic phenomena:
– Creep
– Stress relaxation
– Rate dependent stress-strain curves

39
VISCOELASTICITYElastic, Viscous, and Viscoelastic Responses
σA
CREEPObserved Time Dependent Material Behavior
u

40
CREEPPaper Experimental Data (Tension)
Strain , %
Brezinski, J. P., “The Creep Properties of Paper,” TAPPI, Vol. 39(2), pp. 116-128, 1956.
Time, s
STRESS RELAXATIONDefinition
δ=δ
L
Lo
oδεε ==
oδ=δ
41
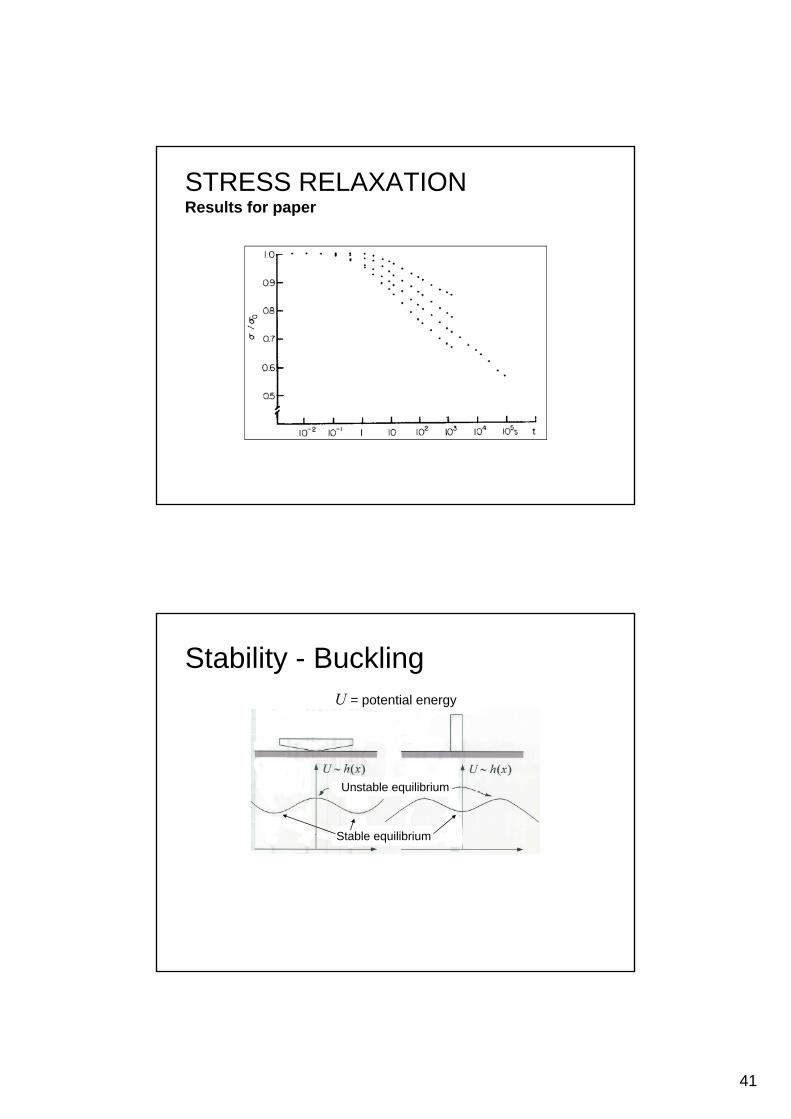
STRESS RELAXATIONResults for paper
Stability - BucklingU = potential energy
Unstable equilibrium
Stable equilibrium

42
Euler buckling of importance for compression testing
Plasticity and failure criteria under multi-axial loading conditions
Example: von Mises yield criterion for isotropic materials
1/ 22 2 2 2 2 23 3 3x y z x y x z y z xy xz zy Yσ σ σ σ σ σ σ σ σ τ τ τ σ⎡ ⎤+ + − − − + + + =⎣ ⎦
22 2σ σ τ σ σ⎛ ⎞
Example: Tsai-Wu’s failure criterion for an orthotropic material
1 1 1 1 1
L T LT L T
Lt Lc Tt Tc f Lt Lc Tt Tc
L TLt Lc Tt Tc
σ σ τ σ σσ σ σ σ τ σ σ σ σ
σ σσ σ σ σ
⎛ ⎞+ + − +⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞ ⎛ ⎞
+ + + =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠

43
After Lecture 5 you should be able to
• discuss the mechanical behaviour of particularly paper and paperboard packaging materials in terms of theand paperboard packaging materials in terms of the most important types of models used in solid mechanics.




























![[Solutions] Fundamentals of Fluid Mechanics Munson](https://img.dokumen.tips/doc/110x75/577cc1461a28aba71192983f/solutions-fundamentals-of-fluid-mechanics-munson.jpg)
