Embed Size (px)
Citation preview

2.1 Fundamental DC-DC Converter Topologies
These graphics show the three fundamental DC-DC power converter topologies. Based on these other popular topologies are derived; including the flyback, forward, push-pull, half-bridge, and full bridge converter topologies.
In these three fundamental topologies, the two switching elements, namely the switch and rectifier diode, are under different voltage stresses. In a Buck, the voltage stress is Vin, while in a Boost it is Vo, and in a Buck-Boost, it is Vin+Vo. The higher stress in the Buck-Boost implies that it is only suitable for lower power level applications.
A major limitation of these three fundamental topologies is that they do not provide electrical isolation between the input and output. In many applications electrical isolation is desirable.
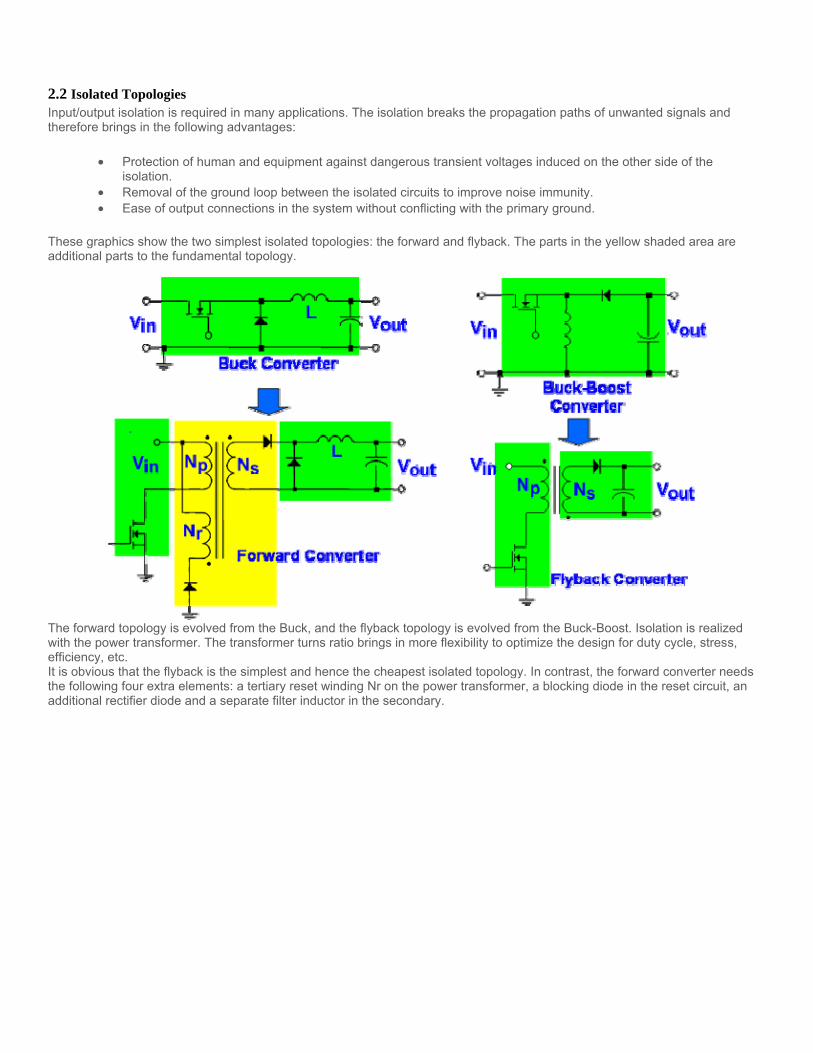
2.2 Isolated Topologies Input/output isolation is required in many applications. The isolation breaks the propagation paths of unwanted signals and therefore brings in the following advantages:
• Protection of human and equipment against dangerous transient voltages induced on the other side of the isolation.
• Removal of the ground loop between the isolated circuits to improve noise immunity. • Ease of output connections in the system without conflicting with the primary ground.
These graphics show the two simplest isolated topologies: the forward and flyback. The parts in the yellow shaded area are additional parts to the fundamental topology.
The forward topology is evolved from the Buck, and the flyback topology is evolved from the Buck-Boost. Isolation is realized with the power transformer. The transformer turns ratio brings in more flexibility to optimize the design for duty cycle, stress, efficiency, etc. It is obvious that the flyback is the simplest and hence the cheapest isolated topology. In contrast, the forward converter needs the following four extra elements: a tertiary reset winding Nr on the power transformer, a blocking diode in the reset circuit, an additional rectifier diode and a separate filter inductor in the secondary.
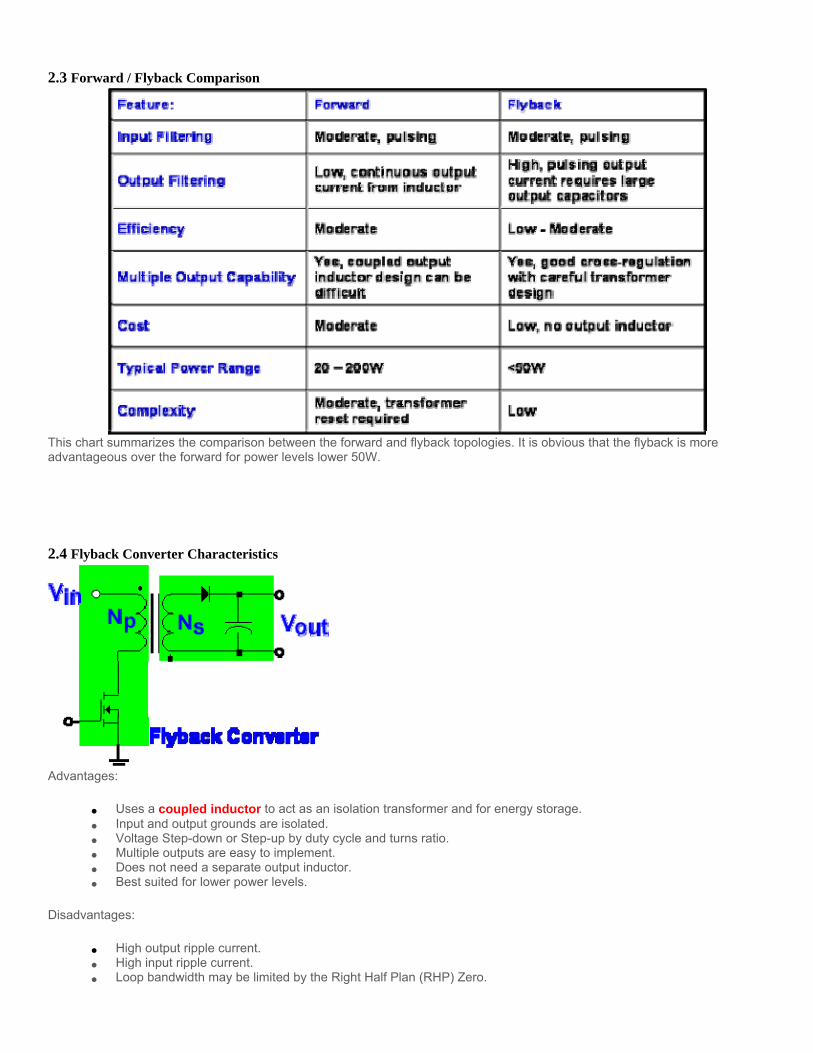
2.3 Forward / Flyback Comparison
This chart summarizes the comparison between the forward and flyback topologies. It is obvious that the flyback is more advantageous over the forward for power levels lower 50W.
2.4 Flyback Converter Characteristics
Advantages:
• Uses a coupled inductor to act as an isolation transformer and for energy storage. • Input and output grounds are isolated. • Voltage Step-down or Step-up by duty cycle and turns ratio. • Multiple outputs are easy to implement. • Does not need a separate output inductor. • Best suited for lower power levels.
Disadvantages:
• High output ripple current. • High input ripple current. • Loop bandwidth may be limited by the Right Half Plan (RHP) Zero.
2.5 Flyback Merits and Applications
• Flyback converters use the simplest isolated topology, and thus have the lowest cost. • Flyback converters use the least number of power components: 4. • The flyback converter is one of the most understood, implemented and supported topologies. • Flyback converters provide better cross regulation for slave rails, including bias Vcc rail then other topologies. • For these reasons the flyback converter is a good choice for applications in the <50W power range.
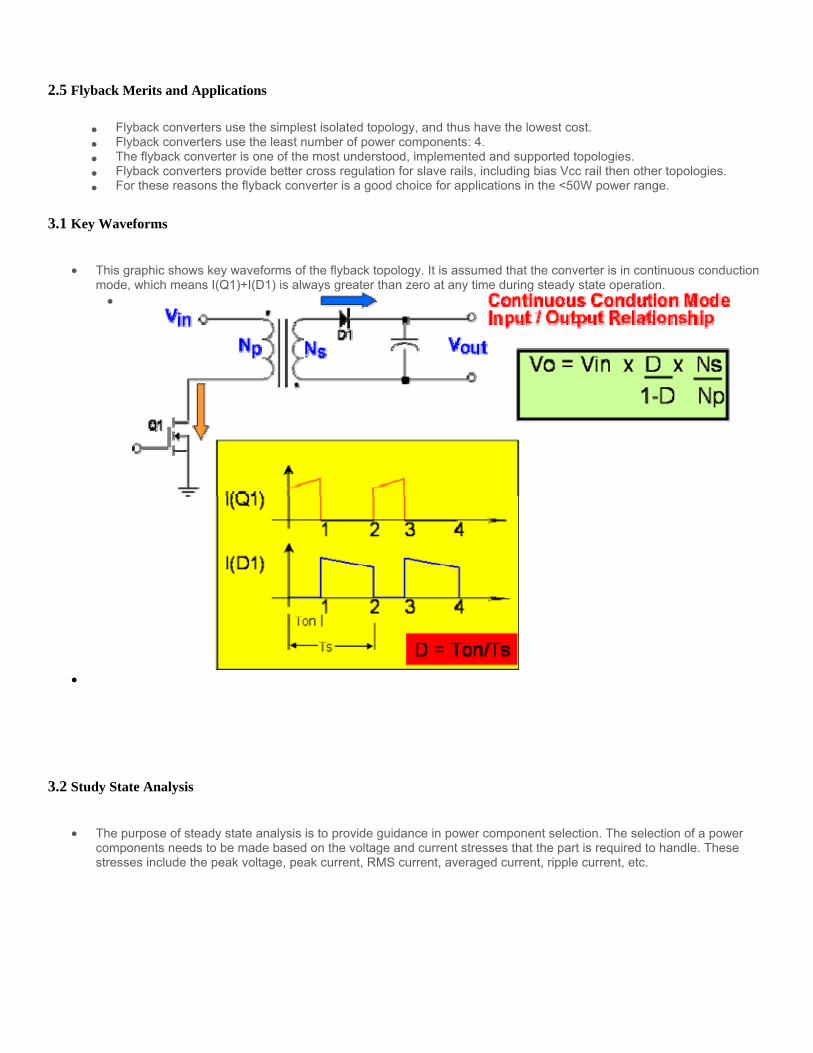
3.1 Key Waveforms
• This graphic shows key waveforms of the flyback topology. It is assumed that the converter is in continuous conduction mode, which means I(Q1)+I(D1) is always greater than zero at any time during steady state operation. •
•
3.2 Study State Analysis
• The purpose of steady state analysis is to provide guidance in power component selection. The selection of a power components needs to be made based on the voltage and current stresses that the part is required to handle. These stresses include the peak voltage, peak current, RMS current, averaged current, ripple current, etc.

•
•
3.3 Study State Analysis Continued
•
• More steady state analyses. Note that the average current through the rectifier diode is the load current Io.

4.1 Key Design Issues
• Flyback converter components must be selected that can handle the necessary current and voltage stresses. These stresses are determined by the formulae presented in the previous chapter.
• All of these stresses are transformer related: turns ratio, inductance.
• Thus the key component and design issue in the converter design is the flyback power transformer which acts as a coupled inductor.
4.2 Flyback Transformer
The basic requirements for a flyback transformer are shown in this graphic. Note that multiple strands of thin wires are required in high switching frequency transformers due to the skin effects. The high inductance is needed to keep operation in continuous conduction mode over a wider load range. With higher inductance, the ripple currents in both the primary and secondary circuit will be lower. The smaller sized transformer uses less ferrite material and hence is usually cheaper. It also occupies less board area allowing the circuit board to be made more compact. A rule of thumb is that the transformer dissipation should be limited to less than 3% of the total power. The dissipation includes

both core losses and the copper (or winding) losses. Copper losses are conduction losses. According to electromagnetic theory, high frequency current tends to flow along a conductor� surface. Any conductor material deeper than the skin effect depth is virtually a waste and does not help in reducing the winding copper losses. For 100% utilization and hence the minimal copper losses, a winding may need to use multiple strands of thin wires with a diameter not greater than twice the skin effect depth at the switching frequency. An example of transformer design will be demonstrated in the following section using an LM5020 Flyback Converter. Note: Experience, trial-and-error iterations, and lots of trade-offs are all involved in practical transformer designs.
4.3 Example - Design Specifications
A design always starts with design specifications, including the input voltage range, power level, output voltage, etc. The duty cycle and switching frequency are normally predetermined. Generally a switching frequency between 200 kHz and 300 kHz is a good compromise between the switching losses and filter requirements. The usable maximum duty cycle is normally limited by the PWM controller. In an LM5020, there are two versions of maximum duty cycle limit, 50% or 80%. Always leave at least 5% margin in the usable maximum duty cycle. The margin leaves room for the duty cycle to increase in response to load variations and hence to maintain the output regulation. However, avoid using a very small duty cycle. A very small duty cycle will result in high RMS, peak and ripple currents. Refer to the steady state analyses. By operating the regulator at a higher frequency, the size of the transformer and filter capacitors can be smaller, but the switching losses associated with the turn-on and turn-off of the main switch will be significant and the overall efficiency will be very low. At a lower frequency, the switching losses become insignificant, but the circuit requires a larger transformer and filter capacitors, and the cost will increase.

4.4 Primary Turns Ratio, Core Selection
Core selection is generally done by trial and error. Verification and refinement of the core selection is always required in each design.
5.Controller Selection
1. 5.1 Controller Choices 2. 5.2 Current Mode vs. Voltage Mode 3. 5.3 LM5020 Controller 4. 5.4 Load Compensation 5. 5.5 Right Half Plan (RHP) Zero 6. 5.6 Slope Compensation 7. 5.7 LM5020 Slope Compensation 8. 5.8 Loop Compensation 9. 5.9 Error Amplifier Design 10. 5.10 Loop Gain Results
5.1 Controller Choices Selection of the power circuit components is only half of the design. The other half is the selection of the control circuitry.
Considerations for the flyback converter controller:
• Voltage mode or current mode • Highly Integration of common functions is desireable:
o input under-voltage lockout o startup regulator o clocking o error amplifier o etc.
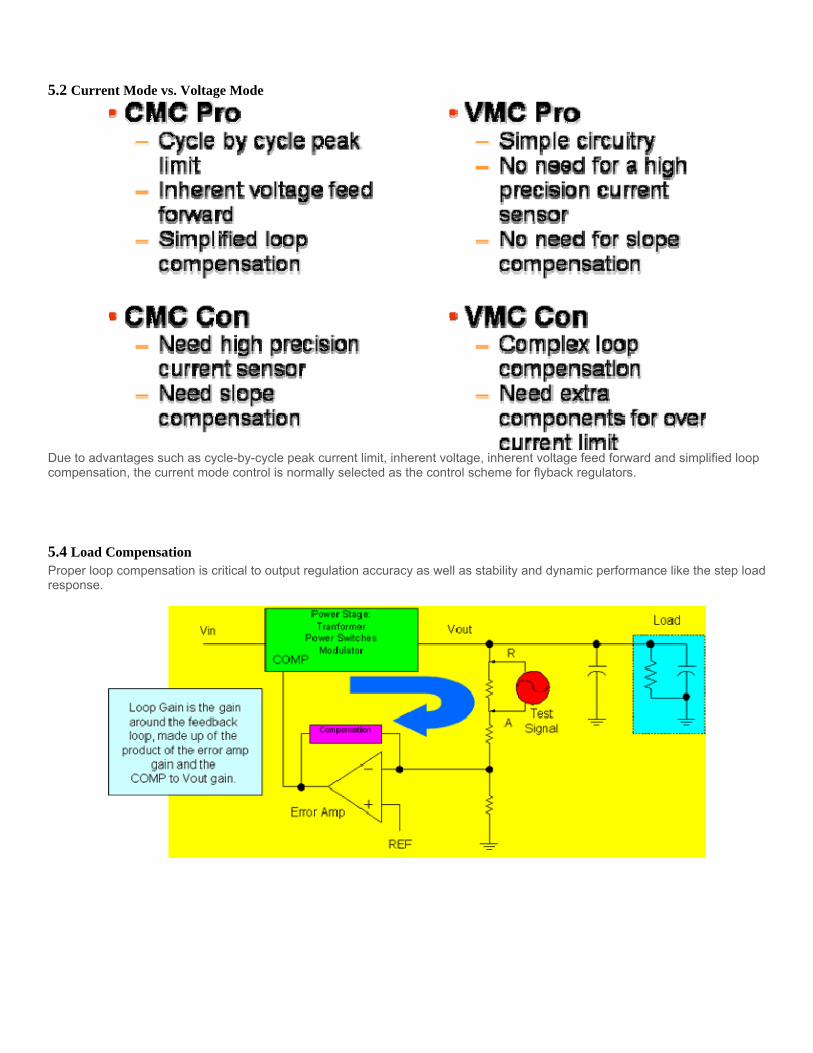
5.2 Current Mode vs. Voltage Mode
Due to advantages such as cycle-by-cycle peak current limit, inherent voltage, inherent voltage feed forward and simplified loop compensation, the current mode control is normally selected as the control scheme for flyback regulators.
5.4 Load Compensation Proper loop compensation is critical to output regulation accuracy as well as stability and dynamic performance like the step load response.

5.5 Right Half Plan (RHP) Zero
The physical Nature of the RHP zero: With upward step load, secondary current is supposed to increase, but:
• Vo will drop temporarily. • Duty cycle will increase in response. • Secondary current pulse will be cut short. • Secondary current is reduced, instead.
It will eventually catch up, but momentarily the response walks in the opposite direction. This is in conflict with what is desired, and is represented as a RHP zero. The Right Half Plan (RHP) zero complicates the loop compensation. When the load decreases, i.e. Ro increases, the RHP Zero moves toward the higher frequency range. When the duty cycle decreases, i.e. the input voltage increases, the RHP Zero moves to a higher frequency. An extremely large inductance results in a lower RHP Zero. &rarr Be reasonable. Therefore, the worst case to consider is the maximum power at the minimum input voltage. Vin_min = 30V &rarr RHP_Zero_min = 23 kHz Vin = 48V &rarr RHP_Zero = 57 kHz Maximum loop bandwidth: 1/3 of 23 kHz &rarr about 8 kHz; or 1/6 of Fsw, whichever is lower.
5.6 Slope Compensation

Background: Current mode controlled power converters operating at duty cycles >50% are prone to sub-harmonic oscillation. Disturbances in peak rising current (D I) increase at the end of the cycle.
Solution: Slope compensation: adding a slope to the current signal, which is equivalent to subtracting a slope from the error voltage (Ve). Then the disturbance decreases at the end of the cycle.
5.8 Loop Compensation Refering to the graph shown below, the green line represents the loop compensation goal. The blue line is the measured gain of the power stage, from the output of the error amplifier (COMP pin) to the output. The red line is the phase of the power stage. The difference between the green and blue lines is the required compensation that must be provided by the error amplifier.

5.9 Error Amplifier Design The required compensation can be achieved by using a Type 2 error amplifier, as shown in the graphic. A Type 2 error amplifier brings in a pole at the Origin to boost the dc gain, a zero at mid frequency to compensate the gain at cross-over, and a second pole at a higher frequency to attenuate the switching noise.
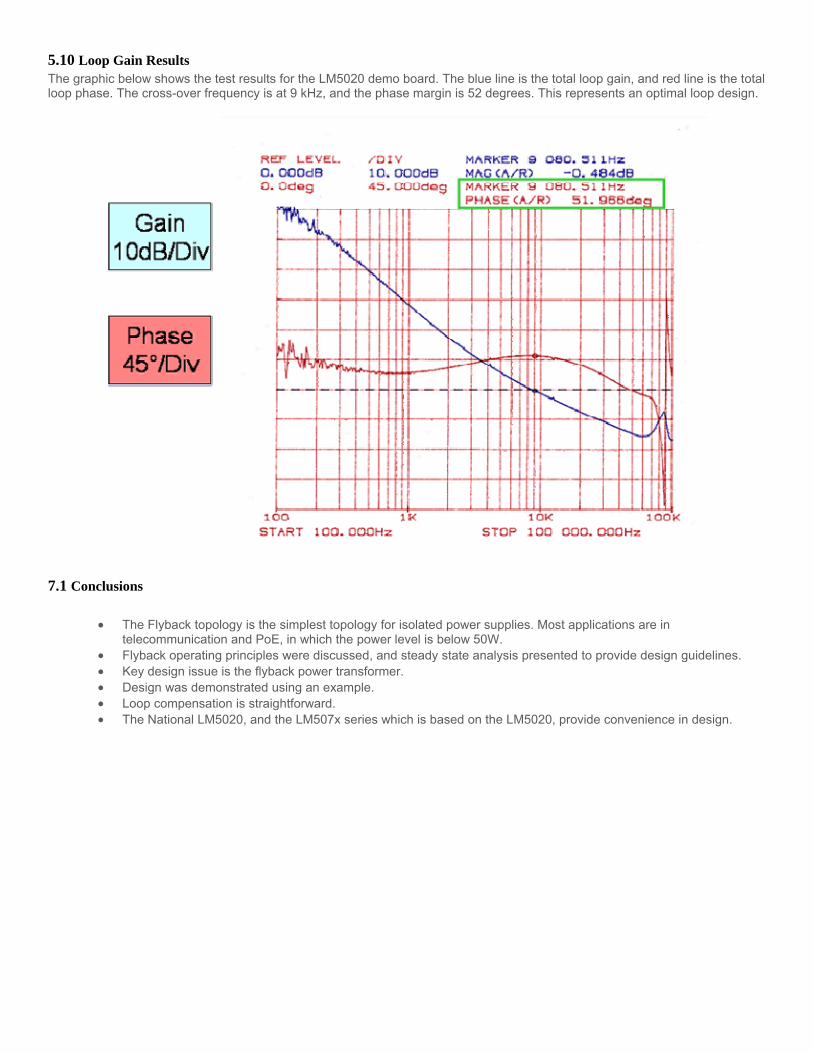
5.10 Loop Gain Results The graphic below shows the test results for the LM5020 demo board. The blue line is the total loop gain, and red line is the total loop phase. The cross-over frequency is at 9 kHz, and the phase margin is 52 degrees. This represents an optimal loop design.
7.1 Conclusions
• The Flyback topology is the simplest topology for isolated power supplies. Most applications are in telecommunication and PoE, in which the power level is below 50W.
• Flyback operating principles were discussed, and steady state analysis presented to provide design guidelines. • Key design issue is the flyback power transformer. • Design was demonstrated using an example. • Loop compensation is straightforward. • The National LM5020, and the LM507x series which is based on the LM5020, provide convenience in design.





























