Embed Size (px)
Citation preview
uld bek werent andnsid-mbentr legarly toere re-upright
usclembentcranktimingravityf the
ticularnsionknee
adap-bodyncingationtional
evelop-further
Nils A. HakanssonBiomedical Engineering Program
M. L. Hull1
e-mail: [email protected]
Department of Mechanical Engineering,Biomedical Engineering Program, University of
California, Davis, CA 95616
Functional Roles of the LegMuscles When Pedaling in theRecumbent Versus the UprightPositionAn understanding of the coordination of the leg muscles in recumbent pedaling wouseful to the design of rehabilitative pedaling exercises. The objectives of this worto (i) determine whether patterns of muscle activity while pedaling in the recumbeupright positions are similar when the different orientation in the gravity field is coered, (ii) compare the functional roles of the leg muscles while pedaling in the recuposition to the upright position to the upright position and (iii) determine whethemuscle onset and offset timing for recumbent and upright pedaling respond similchanges in pedaling rate. To fulfill these objectives, surface electromyograms wcorded from 10 muscles of 15 subjects who pedaled in both the recumbent andpositions at 75, 90, and 105 rpm and at a constant workrate of 250 W. Patterns of mactivation were compared over the crank cycle. Functional roles of muscles in recuand upright pedaling were compared using the percent of integrated activation incycle regions determined previously for upright pedaling. Muscle onset and offsetwere also compared. When the crank cycle was adjusted for orientation in the gfield, the activation patterns for the two positions were similar. Functional roles omuscles in the two positions were similar as well. In recumbent pedaling, the uniarhip and knee extensors functioned primarily to produce power during the exteregion of the crank cycle, whereas the biarticular muscles crossing the hip andfunctioned to propel the leg through the transition regions of the crank cycle. Thetations of the muscles to changes in pedaling rate were also similar for the twopositions with the uniarticular power producing muscles of the hip and knee advatheir activity to earlier in the crank cycle as the pedaling rate increased. This informon the functional roles of the leg muscles provides a basis by which to form funcgroups, such as power-producing muscles and transition muscles, to aid in the dment of rehabilitative pedaling exercises and recumbent pedaling simulations toour understanding of task-dependent muscle coordination.fDOI: 10.1115/1.1865192g
asrig
or tss
o bdisionovsingrtic
dinb
ighthouth
-ls toand
nt
ivedg isin
andrrent
bentoti-
ana-fore,pat-rankider
le ac-hilerscles
es oftionsanu
Introduction
Recumbent pedaling is an exercise well suited for the diseand disabled population. Recumbent ergometers, unlike upbicycles, have large seats with backrests to provide support fupper body and are low to the ground, permitting easier accewheelchair riders and individuals with mobility impairmentsf1g.Furthermore, recumbent pedaling has been demonstrated ttherapeutic modality for exercise and rehabilitation for theeased and disabledf2–6g. Better understanding the coordinatof the leg muscles in recumbent pedaling could lead to inntions that will improve the efficacy of recumbent pedaling atherapeutic modality. Coordination involves the relative timand activity levels and the functional roles of the muscles papating in the pedaling motion.
Prior experimental and theoretical research of muscle coortion while pedaling has resulted in a theoretical frameworkwhich to classify the functional roles of the leg muscles in uprpedalingf7,8g. This framework is based on observations thatmuscles can be partitioned into phase-controlled functional grsPCFGd based on the extent of muscle activity as indicated bypercentage of whole cycle integrated muscle activationsiACTd in
1Corresponding author.Contributed by the Bioengineering Division for publication In the JOURNAL OF
BIOMECHANICAL ENGINEERING. Manuscript received September 25, 2003. Final m
script received September 10, 2004. Associate Editor: Kit Vaughan.Journal of Biomechanical Engineering Copyright © 200
edhthefor
e a-
a-a
i-
a-ytepse
a particular functional region of the crank cyclef7,8g. This framework has been used in the development of computer modesimulate pedaling under different conditions, such as forwardbackward pedalingf9,10g and pedaling while reclined at differebody orientationsf11g.
Coordination of muscles in recumbent pedaling has recelimited attention. Although the position of recumbent pedalindifferent from that of normal upright pedaling, similaritiesmuscle coordination should exist. Lower extremity kineticskinematicssi.e., musculoskeletal system outputsd are similar forecumbent and upright pedaling when adjusted for the diffeorientation of the rider with respect to gravityf1,4g. If concomi-tant similarities in muscle activity patterns between recumand upright pedaling could be established, then this would mvate the application of PCFG analysis for upright pedaling tolyze muscular coordination in the recumbent position. Therethe first objective was to determine whether muscle activityterns are similar for the two pedaling positions when the ccycle is rotated to account for the different orientation of the rwith respect to gravity.
Although previous research has demonstrated that musctivity levels change as a result of different body orientations wpedaling in the reclined positionf12g, we are aware of no priostudies that have examined the functional roles of the leg muin recumbent pedaling. An understanding of the functional rolthe leg muscles would be useful to the development of simula-
of recumbent pedaling that could be used to design rehabilitativeAPRIL 2005, Vol. 127 / 3015 by ASME

s adifbet
pomithee-it
d ts oectrolwo
off
gh
cumedabeo
r lealin
15jecdmolrsit
mele
a. Tomho
fope
um-d by a
min.rvalseterubject
high-,t ei-rfaceirtual
thetheetersystemf therfacelcu-ricalwere
in-
eraswere
utter-axi-at-
eres
s-ceonec-d-es at-shers.pped
thewerecy toerrorumucethelow-
-o-f the
d for
seline
tter-
r the. Theateand
pedaling exercises. Assuming that the muscle activity patternsimilar for the two pedaling positions when adjusted for theferent orientation of the rider with respect to gravity, it couldconcluded that the musculoskeletal system inputs to performpedaling task are the same for the recumbent and uprighttions. If the musculoskeletal system inputs and outputs are sifor the two pedaling positions, then the internal activity ofmusculoskeletal systemsi.e., muscle functional roles and mchanical energeticsd should be similar as well, thereby makingpossible to draw upon the results of a PCFG analysis anliterature on upright pedaling to determine the functional rolethe leg muscles in recumbent pedaling. Thus the second objwas to perform a PCFG analysis to compare the functionalof the leg muscles while pedaling at a set pedaling rate andrate in the recumbent and upright positions.
Previous research has shown that leg muscle onset andtiming in upright pedaling are affected by pedaling ratef8,13,14g.Additionally, the functional roles of the leg muscles in upripedaling did not change over a large range of pedaling ratesf8g. Ifthe onset and offset timing of the leg muscles in both the rebent and upright positions respond similarly to changes in ping rate, then the functional roles of the leg muscles in recumpedaling would be applicable to more pedaling rates than theinvestigated. The third objective was to determine whethemuscle onset and offset timing for recumbent and upright pedrespond similarly to changes in pedaling rate.
Methods
Experiments. Written informed consent was obtained fromcyclists who volunteered for the study. The age of the subranged from 18 to 60 yearssmean 30 yearsd, the heights rangefrom 1.73 to 1.91 msmean 1.81 md, and the weights ranged fro64 to 82 kg smean 72 kgd sTable 1d. The experimental protocwas approved by the Institutional Review Board of the Univeof California at Davis.
Kinematic, kinetic, and electromyographicsEMGd data werecollected from the subjects as they pedaled a recumbent ergosScifit ISO1000R, Tulsa, OKd and a conventional racing bicycmounted on an electronically braked Velodyne ergometersFront-line Technology, Inc., Irvine, CAd. Both ergometers allowedconstant work rate to be set independent of pedaling ratesubjects adjusted the bicycle to match their own bicycle’s geetry. The subjects all used zero-float clipless pedals and ctheir own cleat angle.
The subjects pedaled at 90 rpm with a work rate of 120 W15 min to warm up, and thereby account for temperature de
Table 1 Demographic and United States Cycling Federation„USCF… category level for the study subjects. Two of the sub-jects were classified as competitive endurance cyclists „CEC….The mean age, height, and weight „±1 standard deviation … were29.9 „±12.0…, 1.81 „±0.06… m, and 71.8 „±5.2… kg, respectively.
Subject Gender Agesyrsd Height smd Weight skgd Level
1 M 24 1.73 68.9 Cat 52 M 18 1.91 68.0 Cat 33 M 27 1.79 76.2 Cat 44 M 28 1.88 79.4 Cat 35 M 60 1.83 73.5 CEC6 M 23 1.91 79.4 Cat 57 M 27 1.88 70.3 Cat 48 M 54 1.77 72.6 CEC9 M 24 1.78 67.1 Cat 410 M 22 1.75 70.3 Cat 411 M 23 1.83 66.7 Cat 412 M 21 1.73 70.3 Cat 413 M 37 1.79 64.4 Cat 414 M 30 1.78 68.0 Cat 515 M 30 1.83 81.6 Cat 4
dencies of muscle functionf15g. The subjects then pedaled at 75
302 / Vol. 127, APRIL 2005
re-
hesi-lar
hef
iveesrk
set
t
-l-ntnegg
ts
y
ter
he-se
rn-
90, and 105 rpm with a work rate of 250 W on both the recbent and upright ergometers. The pedaling rate was regulatemetronome. The subjects pedaled at each pedaling rate for 5Data were collected ten times for 3 s randomly selected inteduring the last 2.5 min of the 5 min test period. The ergomorder and pedaling rates were assigned randomly for each sto control for possible interactions and fatigue.
Ergometer crank angle data were determined usingresolution video-based motion analysissMotion Analysis Corp.Santa Rosa, CAd. Spherical reflective markers were placed ather end of a 30 cm long bar attached in line with the top suof the pedal and at three fixed points on the ergometers. A vmarker indicating the point connecting the pedal spindle tocrank was developed at the midpoint of the two markers inpedal-fixed frame. The three markers attached to the ergomwere necessary to establish an ergometer-fixed coordinate sto track a virtual marker located at the point where the axis ocrank spindle intersected a plane coincident with the outer suof the crank arm. The position of this virtual marker was calated using a static calibration trial where the center of a sphereflective marker was attached at the point. Crank anglesdetermined from the two virtual markers. The right crankarmthe upward vertical positionsi.e., top-dead-centerd defined the beginning of the crank cycles0 deg of a 360 deg cycled for both therecumbent and upright positions. Four high-speed video camrecorded the three-dimensional marker positions. Video datasampled at 120 Hz and filtered using a zero phase shift Bworth low-pass filter with a cutoff frequency at 10 Hz, the mmum frequency of normal human movementf16g. The crank datwere interpolated by cubic splinesMATLAB , The Math Works, Naick, MAd to make it synchronous with the EMG datassee belowd.
To examine muscle activity, surface EMG electrodes wplaced over the belly of the soleussSOLd, medial gastrocnemiusMGASd, lateral gastronemiussLGASd, tibialis anteriorsTAd, vas-tus medialis sVASMd, vastus lateralissVASLd, rectus femorisRFd, biceps femorissBFd, medial hamstringsSMd, and the gluteus maximussGMAX d of the right leg. The preamplified surfaelectrodes sModel MA-300-10, Motion Lab Systems, BatRouge, LAd were fit with custom-made silver-silver chloride eltrode cupssIn Vivo Metric, Healdsburg, CAd and placed accoring to the recommendations of Delagi et al.f17g. The electrodcups were filled with electrode cream, and the electrode watached to the shaved, abraded skin surface with adhesive waFollowing placement, an adhesive elastic wrap was wraaround the leg to secure the electrode attachment.
The EMG outputs were collected and synchronized withvideo data by the motion capture system. EMG signalssampled at 1200 Hz to ensure the ratio of sampling frequensignal frequency was greater than five for a mean amplitudeless than 5%f18g. The EMG gains were set to yield the maximresolution of the digitized signal without saturation. To redlow-frequency motion artifacts and high-frequency noise,EMG data were passed through a bandpass analog filter withpass cutoff of 500 Hz and high-pass cutoff of 40 Hzsmanufacturer’s recommendationd. The 12-bit A/D board contained in the mtion analysis system digitized the analog inputs. At the end opedaling trials, resting baseline EMG values were collecte10 s while the subject rested in a supine positionf8g. The meanvalues of the rectified baseline data were used to subtract baoffset in the EMG records.
EMG Processing.The raw sampled EMG dataestd were full-wave rectified, filtered using a zero phase lag fourth-order Buworth digital filter with 12 Hz cutoff frequencyf8,16,19g, de-meaned, and normalized to the highest value measured forespective muscle while pedaling the respective ergometernormalized EMG dataustd were then subjected to two separprocesses to obtainsid the burst onset and offset crank angles,
m
,sii d the muscle activation,a std.Transactions of the ASME

inat
riteld
hinuredry
od--
ntiv
rmcleun
r,d bterienlinhiinebe
e d
ratthe
e of
hfour
fbasisalyzedum-
ionrighta for
thefieldT ininedted-rte
ightothelimi-tsuresions
elsf-
um-h of
ionclesi-
heed asex-
fores intwo-e two
r eacht po-
4 degtitionepa-
tal of-
factorf the
of 60
velsf-
The EMG burst onset and offset crank angles were determwith reference to the resting baseline data. A custom-automwave-form-processing program written in theMATLAB languagewas used to identify the burst onset and offset angles. The cfor the burst onset and offset angles were a minimum threshothree standard deviations of the resting baseline data wit50 ms moving rectangular window and a minimum 50 ms bduration f7,8,19g. The results for each cycle were examingraphically, and the threshold was adjusted when necessaidentify the burst onset and offset anglesf7,8g.
To determine muscle activationamstd, the normalized EMGdata,ustd, were input into a first-order differential equation meling the activation dynamicsf20g. The muscle activation dynamics were represented by the following first-order equation:
am = Hfu − amg · fc1u + fc2 . . .c2gTg u ù am
fu − amg ·c2 u , am J s1d
wherec1=tact−1−tdeact
−1 and c2=tdeact−1 f7,21g. The muscle activatio
and deactivation time constants were 20 and 60 ms, respecf7,8,22g.
Because the second objective of this study was to perfoPCFG analysis to compare the functional roles of the leg musa common definition of the functional regions was used. The ftional regions for upright pedaling defined by Raasch et al.f7g andsubsequently modified by Neptune et al.f8g were used. Howevethe functional regions for recumbent pedaling were rotate54 deg scounterclockwise from the right side of the ergomedfrom those of upright pedaling to account for the different ortation of the rider with respect to gravity in recumbent pedasFig. 1d. The change in the angle formed by the line from thejoint to the crank spindle with the vertical was used to determthe extent by which the regions defined for upright pedaling wrotated. The four primary regions associated with the recumposition were labeled as the extensionsEd region s283–80 degd,distal transition sDd region s18–174 degd, flexion sFd regions95–270 degd, and proximal transitionsPd regions187–337 degd.The unions between adjacent regions in the crank cycle werfined as E-D, D-F, F-P, and P-Ef8g.
The PCFG analyses commenced by computing the integmuscle activationsiACTd for the whole crank cycle based on
Fig. 1 The phase-controlled functional regions for the recum-bent position „gray … and the upright position „black …. The fourprimary regions for the upright position are based on the workof Raasch et al. †7‡ and include the extension „E…, distal transi-tion „D…, flexion „F…, and proximal transition „P… regions. Thecorresponding regions for the recumbent position have beenrotated by 54 deg in the counterclockwise direction to accountfor the different seat angle with respect to the upright position.
following equation:
Journal of Biomechanical Engineering
eded
riaofa
st
to
ely
as,
c-
y
-gperent
e-
ed
iACT=E0
T
amdt s2d
whereT is the time of the crank cycle. Next, the percentagiACT within each of the four primary regionssi.e., extensionsEd,distal sDd, flexion sFd, and proximalsPdd was calculated for eacmuscle. Subsequently, the percentage of iACT for each of theunion regionssi.e., E-D, D-F, F-P, and P-Ed was computed. All othe dependent variables were computed on a cycle-by-cycleand averaged across cycles for each subject. Data were anfor one whole crank cycle during the 3 s intervals. Thus the nber of cycles included in the subject averages was 10.
Statistical Analysis. To determine whether muscle activatpatterns in the recumbent position were similar to those of uppedaling at 90 rpm, the averaged whole cycle activation dateach muscle was plotted as a function of crank angle withangle adjusted to account for the difference in the gravitybetween the two body positions. Also the percentage of iACeach of the functional regions of the crank cycle was determand compared statistically. A preliminary two-factor repeameasures analysis of variancesANOVA d test was performed foeach of the ten muscles usingSAS sRelease 8.02, SAS InstituInc. Cary, NCd. The two factors were crank cycle region at elevels sfour primary and four uniond and body position at twlevels srecumbent and uprightd. The dependent variable waspercent of whole cycle iACT. Because the results of these prenary analyses indicated that significantsp,0.05d and importaninteractions were present, eight one-factor repeated-meaANOVA tests were performed separately for each of the regfor each muscle, yielding a total of 80 analysess8 regions310 musclesd. The single factor was body position at two levsrecumbent and uprightd. To detect significant body position efects, the level of significance was set atp,0.05/n wheren=8for the Bonferroni correction.
To compare the functional roles of the muscles in the recbent and upright positions, the percentage of iACT within eacthe four primary regionssi.e., extensionsEd, distal sDd, flexionsFd, and proximalsPdd was used determine the principal functof the leg muscles while pedaling in both positions. The muswere determined to have a single functionsextensor, distal transtion, flexor, or proximal transitiond based on the region with tgreatest percentage iACT. The muscle function was redefinbifunctional if the percentage of iACT in the union regionsceeded that of the primary regions by 20%f8g.
To examine whether leg muscle onset and offset timingrecumbent and upright positions responded similarly to changpedaling rate, preliminary statistical analyses consisting offactor repeated-measures ANOVA tests were performed. Thfactors were pedaling rate at three levelss75, 90, and 105 rpmdand body position at two levelssrecumbent and uprightd. Thedependent variables were onset angle and offset angle. Fostatistical analysis, the dependent variable for the recumbensition was referenced to a crank cycle that was rotated by 5scounterclockwise from the right side of the ergometerd to accounfor the different orientation of the rider in the recumbent posrelative to the upright position. The analysis was performed srately for each muscle and dependent variable yielding a to20 analysess10 muscles32 dependent variablesd. Because the results of these analyses indicated that significantsp,0.05d andimportant interactions were present, three separate one-repeated-measures ANOVA tests were performed for each othree pedaling rates for each of the muscles yielding a totalanalysess3 pedaling rates310 muscles32 dependent variablesd.In each analysis the single factor was body position at two lesrecumbent and uprightd. To detect significant body position efects, the level of significance was set atp,0.05/n wheren=3
for the Bonferroni correction.APRIL 2005, Vol. 127 / 303

e
notheth
x offec
can
RF
os
ass
AX,ion
unc-r-ily inl Dgion
and,l D
re-d asur-uni-
ResultsThe muscle activation patterns while pedaling at 90 rpm w
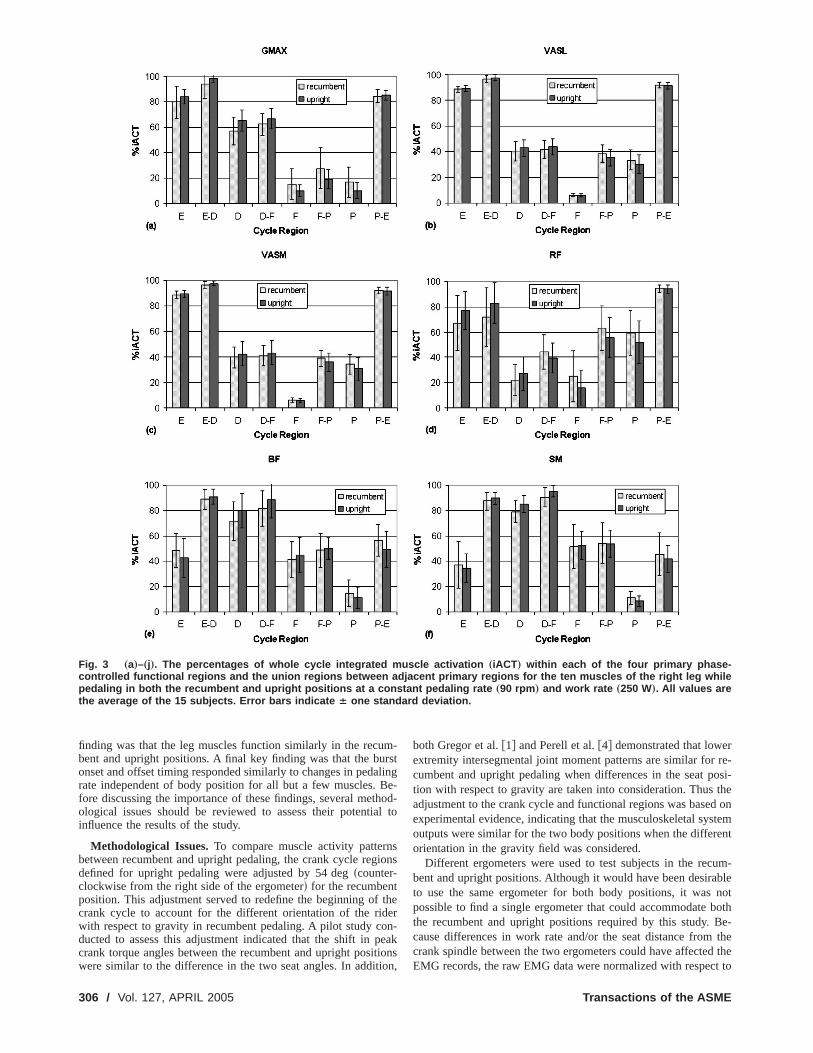
qualitatively similar for the two body positionssFig. 2d. Further-more, the analyses of iACT indicated that body position didsignificantly affect the magnitude of muscle activity withinadjusted functional regions of the crank cycle for most ofmuscle activity-functional region combinations studied. For sithe ten muscles, the body position did not significantly amuscle activity in any of the functional regionssTable 2d. For theremaining four muscles, body position effects were signifisp,0.05/8 orp,0.0063 for the Bonferroni correctiond in onlytwo of the eight functional regions for both VASM andsextension-distalsE-Dd and flexion-proximalsF-Pd regionsd, oneregion for SMsD regiond, and five regions for LGASsE-D, E, F,F-P, and P regionsd. Thus in 70 of the 80s87.5%d of the muscleactivity-functional region combinations examined, the body ption did not significantly affect the muscle activity.
During recumbent pedaling, six of the ten muscles were cl
Fig. 2 „a…–„j…. Muscle activation patterns for the ten muscles of thpositions at a constant pedaling rate „90 rpm … and work rate „2indicate 6 one standard deviation.
fied as unifunctionalsi.e., having a single functiond and four as
304 / Vol. 127, APRIL 2005
re
t
eft
t
i-
i-
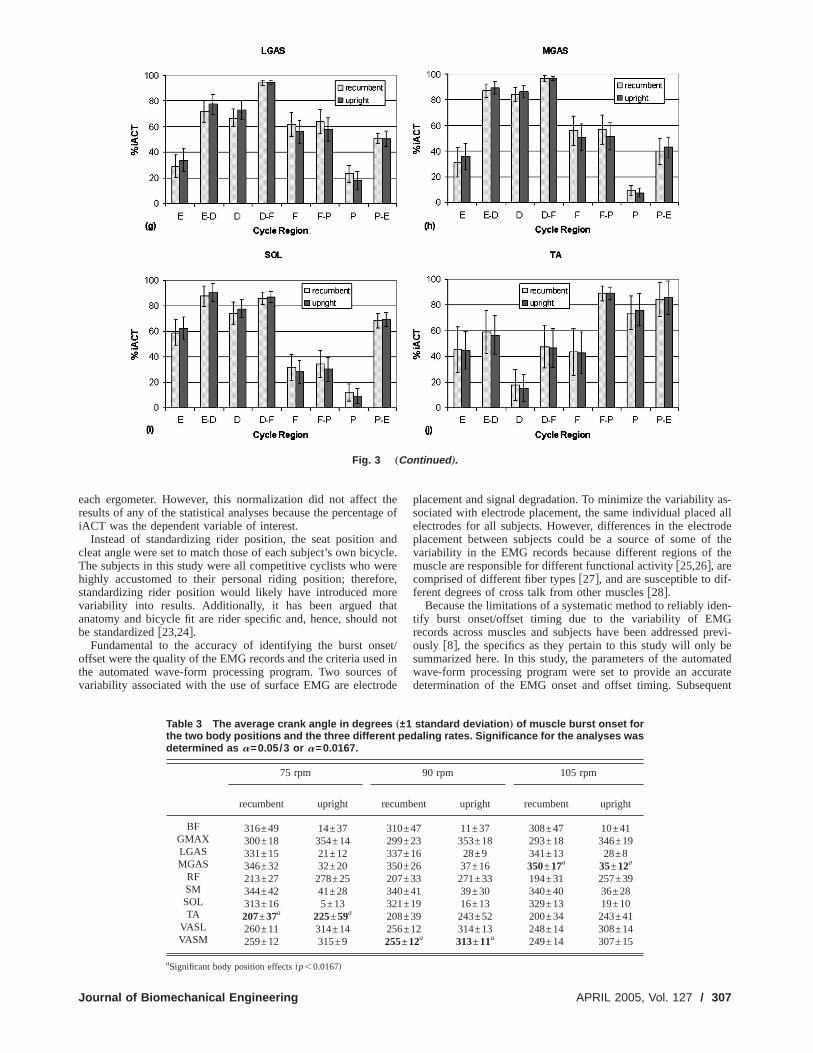
bifunctional. The uniarticular hip and knee extensors, GMVASL, and VASM, were activated primarily during the extensregion and were classified as unifunctional E musclessFig. 3d.The RF, a biarticular hip flexor and knee extensor, was biftional in the proximal-extensionsP-Ed region. BF and SM, biaticular hip extensors and knee flexors, were activated primarthe distal sDd region. SM was classified as an unifunctionamuscle, but BF was classified as bifunctional in the E-D redue to the higher activity level in the E regionsFig. 3d.
The muscles of the triceps surae group, LGAS, MGAS,SOL, were also activated primarily in the distalsDd region andwith the exception of LGAS, were classified as unifunctionamuscles. LGAS was bifunctional in the distal-flexionsD-Fd regionwith over 90% of the activation occurring in these respectivegions. The TA, an uniarticular ankle dorsiflexor, was classifiebifunctional in the F-P region, with 89% of its activation occring in this region. None of the muscles were classified asfunctional in either the P or F regions.
ight leg while pedaling in both the recumbent and uprightW…. All patterns are the average of the 15 subjects. Error bars
e r50
The functional roles of the leg muscles for the upright position
Transactions of the ASME

ora
lna
,die-a
onp-
atde
r apote
the
tgnt
alsotendyach
0y po-
uitedcle co-revi-r
ar toof
theset
simi-tudyar for
key
663
1742
7365
as defined by the PCFG analysis were the same as those frecumbent position for eight of the ten muscles examined. BFTA were classified as unifunctional in the distalsDd and proximasPd regions, respectively, in the upright position and bifunctioin the extension-distalsE-Dd and flexion-proximalsF-Pd regionsrespectively, in the recumbent position. Notwithstanding theferences in classification for these two muscles, there wersignificant differencessp,0.05/8 orp,0.0063 for the Bonferroni correctiond between the percentage of integrated muscletivation siACTd within each of the four primary and four uniregions of the crank cyclesTable 2d in the recumbent versus uright position.
The muscle burst onset and offset analyses indicated thmuscle timing for recumbent and upright pedaling responsimilarly to changes in body position at all pedaling rates fomuscles with a few exceptions. For the muscle onset, bodytion did not significantly affect muscle onset for seven of themuscles examinedsTable 3d. For the remaining three muscles,body position effect was significantsp,0.05/3 orp,0.0167d foronly one pedaling rate for each of these musclessi.e., MGAS at105 rpm, p=0.0024; TA at 75 rpm,p=0.0116; and VASM a90 rpm,p=0.0006d. Thus in 27 of the 30s90%d muscle-pedalinrate combinations analyzed, the body position did not significa
Fig. 2 „
Table 2 Summary of the p-values from the statistical analysesmuscles in the different regions of the crank cycle. Significance for
Region BF GMAX LGAS MGAS
E 0.1633 0.2523 0.0150 0.0522E-D 0.1444 0.1874 0.0004 0.1485 0D 0.0093 0.0427 0.0004 0.1733 0
D-F 0.0351 0.0679 0.2960 0.9898F 0.3537 0.1626 0.0049 0.0475 0
F-P 0.7140 0.1210 0.0028 0.0449 0P 0.0077 0.1178 0.0009 0.1184 0
P-E 0.0395 0.6140 0.9012 0.1140
Journal of Biomechanical Engineering
thend
l
f-no
c-
legd
llsi-n
ly
affect the onset timing. For the muscle offset, body positiondid not significantly affect muscle offset for seven of themuscles examinedsTable 4d. For the remaining muscles, the boposition effect was significant for only one pedaling rate for emuscle sBF at 75 rpm, p=0.0026; GMAX at 105 rpm,p=0.0021; and LGAS at 90 rpm,p=0.0134d. Thus in 27 of the 3s90%d muscle-pedaling rate combinations analyzed, the bodsition did not significantly affect the offset timing.
DiscussionBecause recumbent pedaling is an exercise modality well s
for the diseased and disabled population and because musordination in recumbent pedaling has not been investigated pously, the objectives of this study weresid to determine whethemuscle activation patterns for recumbent pedaling are similthose in upright pedaling,sii d to compare the functional rolesthe leg muscles while pedaling in the recumbent position toupright position, andsiii d to determine whether muscle burst onand offset timing in recumbent and upright pedaling respondlarly to changes in pedaling rate. One key finding of this swas that the activation patterns of the leg muscles were similboth the recumbent and upright pedaling positions. A second
tinued ….
the effect of body position on the functional roles of theanalyses was determined as a=0.05/8 or a=0.0063.
F SM SOL TA VASL VASM
.0072 0.5210 0.1077 0.9149 0.3609 0.243 0.1793 0.1034 0.3161 0.0144 0.005325 0.0007 0.1130 0.1147 0.3054 0.0542
.1250 0.0098 0.6039 0.7748 0.4023 0.173 0.8157 0.1055 0.8895 0.5026 0.486
41 0.8808 0.0497 0.9856 0.0460 0.005266 0.0178 0.0580 0.1382 0.0735 0.008
.3581 0.2541 0.4617 0.3577 0.5723 0.2
Con
ofthe
R
0.00.010
.00.00.000
APRIL 2005, Vol. 127 / 305
umursaliBethoial
nsgio
tf thideonpeitio
err re-posi-
s theed onstemrent
cum-rables not
both. Be-m thed the
finding was that the leg muscles function similarly in the recbent and upright positions. A final key finding was that the bonset and offset timing responded similarly to changes in pedrate independent of body position for all but a few muscles.fore discussing the importance of these findings, several meological issues should be reviewed to assess their potentinfluence the results of the study.
Methodological Issues.To compare muscle activity patterbetween recumbent and upright pedaling, the crank cycle redefined for upright pedaling were adjusted by 54 degscounter-clockwise from the right side of the ergometerd for the recumbenposition. This adjustment served to redefine the beginning ocrank cycle to account for the different orientation of the rwith respect to gravity in recumbent pedaling. A pilot study cducted to assess this adjustment indicated that the shift incrank torque angles between the recumbent and upright pos
Fig. 3 „a…–„j…. The percentages of whole cycle integrated muscontrolled functional regions and the union regions between adjacepedaling in both the recumbent and upright positions at a constantthe average of the 15 subjects. Error bars indicate 6 one stand
were similar to the difference in the two seat angles. In additio
306 / Vol. 127, APRIL 2005
-t
ng-d-to
ns
er-akns
both Gregor et al.f1g and Perell et al.f4g demonstrated that lowextremity intersegmental joint moment patterns are similar focumbent and upright pedaling when differences in the seattion with respect to gravity are taken into consideration. Thuadjustment to the crank cycle and functional regions was basexperimental evidence, indicating that the musculoskeletal syoutputs were similar for the two body positions when the diffeorientation in the gravity field was considered.
Different ergometers were used to test subjects in the rebent and upright positions. Although it would have been desito use the same ergometer for both body positions, it wapossible to find a single ergometer that could accommodatethe recumbent and upright positions required by this studycause differences in work rate and/or the seat distance frocrank spindle between the two ergometers could have affecte
activation „iACT … within each of the four primary phase-rimary regions for the ten muscles of the right leg whilealing rate „90 rpm … and work rate „250 W…. All values aredeviation.
clent ppedard
n,EMG records, the raw EMG data were normalized with respect to
Transactions of the ASME
t thag
ancyc
eroreorhad n
sed
esrod
y as-d all
trodeof thethe
if-
den-Gprevi-
bematedurateuent
each ergometer. However, this normalization did not affecresults of any of the statistical analyses because the percentiACT was the dependent variable of interest.
Instead of standardizing rider position, the seat positioncleat angle were set to match those of each subject’s own biThe subjects in this study were all competitive cyclists who whighly accustomed to their personal riding position; therefstandardizing rider position would likely have introduced mvariability into results. Additionally, it has been argued tanatomy and bicycle fit are rider specific and, hence, shoulbe standardizedf23,24g.
Fundamental to the accuracy of identifying the burst onoffset were the quality of the EMG records and the criteria usethe automated wave-form processing program. Two sourcvariability associated with the use of surface EMG are elect
Fig. 3 „
Table 3 The average crank angle in degrees „
the two body positions and the three different pedadetermined as a=0.05/3 or a=0.0167.
75 rpm
recumbent upright re
BF 316±49 14±37 31GMAX 300±18 354±14 2LGAS 331±15 21±12 33MGAS 346±32 32±20 35
RF 213±27 278±25 2SM 344±42 41±28 34SOL 313±16 5±13 32TA 207±37a 225±59a 20
VASL 260±11 314±14 2VASM 259±12 315±9 255
a
Significant body position effectssp,0.0167dJournal of Biomechanical Engineering
ee of
dle.e,
etot
t/inofe
placement and signal degradation. To minimize the variabilitsociated with electrode placement, the same individual placeelectrodes for all subjects. However, differences in the elecplacement between subjects could be a source of somevariability in the EMG records because different regions ofmuscle are responsible for different functional activityf25,26g, arecomprised of different fiber typesf27g, and are susceptible to dferent degrees of cross talk from other musclesf28g.
Because the limitations of a systematic method to reliably itify burst onset/offset timing due to the variability of EMrecords across muscles and subjects have been addressedously f8g, the specifics as they pertain to this study will onlysummarized here. In this study, the parameters of the autowave-form processing program were set to provide an accdetermination of the EMG onset and offset timing. Subseq
tinued ….
standard deviation … of muscle burst onset forg rates. Significance for the analyses was
90 rpm 105 rpm
bent upright recumbent upright
47 11±37 308±47 10±4123 353±18 293±18 346±1916 28±9 341±13 28±826 37±16 350±17a 35±12a
33 271±33 194±31 257±3941 39±30 340±40 36±2819 16±13 329±13 19±109 243±52 200±34 243±4112 314±13 248±14 308±14
2a 313±11a 249±14 307±15
Con
±1lin
cum
0±99±7±0±
07±0±1±
8±356±±1
APRIL 2005, Vol. 127 / 307

pern ththl ps o
s
ndthth
entem, th-ll.lysighheesdaltio
-
wa
ttinfib
ens
necle
exnexablitio
ath
f th
edii-eisto
rate aansi-
thedistal
legwas
n toistal
-g
,ortionr-
es ofe theBF
-si-sclecle
d-ich
r there-
ntaged P
the
ody. TA
e TAhereandCT
rightunc-ndi-ce in
asonset
interactive visual inspection on a trial-by-trial basis wasformed to verify the onset and offset determination and, wheburst duration did not fall within three standard deviations ofresting baseline, to systematically adjust the threshold leverameter to identify the primary temporal burst characteristicthe EMG record.
Importance/Interpretation of Results. The results of thistudy demonstrated that the musculoskeletal system inputssi.e.,muscle activation patternsd were similar between recumbent aupright pedaling when adjusted for the different orientation ingravity field. Moreover previous research has demonstratedlimb kinematics and kinetics in pedaling are similar for differbody orientationsf1,4g. Because both the musculoskeletal sysinputs and outputs are similar for the two pedaling positionsinternal activity of the musculoskeletal systemsi.e., muscle functional roles and mechanical energeticsd should be similar as weThe classification of muscle function based on the PCFG anawhich used crank cycle regions previously defined for uprpedaling f7,8g but adjusted for the different orientation in tgravity field, confirmed the similarity in muscle functional rolAccordingly, a forward dynamic simulation of recumbent peing to determine appropriate regions and define muscle funcbased on those regions was unnecessary.
The unifunctional role in the extensionsEd region of the uniarticular muscles that extend the hip and kneesi.e., GMAX, VASL,VASMd indicates that the principal function of these musclesto develop power during the E region of the crank cyclef7,8g. Therole of the GMAX and vastii muscles as power producers is fibecause their large physiological cross-sectional areas andtype distributions make them capable of generating large extmoments at the hip and knee, respectively. Raasch et al.f7g re-ported that together GMAX and vastii provided 55% of themechanical energy produced by the muscles over a crank cyupright pedaling.
The bifunctional role of the biarticular hip flexor and kneetensor muscle, rectus femorissRFd, in the proximal-extensiosP-Ed region indicates that this muscle generates both a flmoment at the hip and an extensor moment at the knee, enRF to assist in propelling the leg through the proximal transregion f7g. In the E region, where GMAX activity generatesdominant hip extensor moment, RF activity contributes toknee joint extensor moment also generated by the activity ovastii muscles.
The biarticular hip extensor and knee flexor muscles, mhamstringsSMd and biceps femorissBFd, were classified as unfunctional in the distalsDd region and as bifunctional in thextension-distalsE-Dd region, respectively. Notwithstanding thdifference, the principal function of both the SM and BF is
Table 4 The average crank angle in degrees „±1 standard devithree different pedaling rates. Significance for the analyses was det
75 rpm
recumbent upright re
BF 151±50a 228±48a 15GMAX 73±33 129±10 6LGAS 218±15 267±18 216MGAS 175±31 240±21 1
RF 39±47 112±29 3SM 174±39 244±29 1SOL 124±51 168±43 1TA 313±16 5±18 31
VASL 68±13 128±10 6VASM 71±17 132±19 6
aSignificant body position effectssp,0.0167d
drive the crank through the distal region of the crank cycle. Bot
308 / Vol. 127, APRIL 2005
-e
ea-f
eat
t
e
is,t
.-ns
s
ger-or
tin
-
oringn
ee
al
the SM and BF serve to transfer energy from the leg to genepedal reaction force to propel the crank through the distal trtion f7g.
Two sMGAS and SOLd of the three muscles comprisingtriceps surae group were classified as unifunctional in thesDd region and thereby functioned to transfer power from theto the crank through the distal transition region. Only LGASclassified as bifunctional in the distal-flexionsD-Fd region, whichindicates that LGAS may contribute to knee flexion in additiotransferring power from the leg to the crank through the dtransition region.
The uniarticular ankle dorsiflexor, tibialis anteriorsTAd, wasactivated primarily in the proximalsPd region and was bifunctional in the flexion-proximalsF-Pd region, indicating that the leflexors actively flex the leg in the F and P regionsf7g. Howeverbecause power is absorbed by the leg in the F region and a pof the P regionf29,30g, the flexor activity is not enough to ovecome gravity.
The PCFG analysis results indicated that the functional rolthe leg muscles for both recumbent and upright pedaling wersame for all muscles except BF and TA. In upright pedalingwas unifunctional in the distalsDd region f7,8g but was bifunctional in the extension-distalsE-Dd region in the recumbent potion. This change occurred because of a slight shift in muactivity from the D region to regions earlier in the crank cysi.e., in the proximalsPd and E regionsd compared to upright pealing sFig. 3sedd. The onset and offset angles at 90 rpm, whwere 7 and 5 deg earlier in the crank cycle, respectively, forecumbent position, reflect the advance of BF activity in thecumbent position. Nevertheless, the differences in the perceof BF activity between the two body positions in the D anregions were not statistically significant, thereby weakeningmeaningfulness of the different functional classification.
Although the TA also was classified differently for the two bpositions, similar to the BF the difference was not meaningfulwas classified as bifunctional in the flexion-proximalsF-Pd regionfor the recumbent position whereas for the upright position thwas classified as unifunctional in the P region. However, twas only a 2% difference in iACT between the recumbentupright positions in the P region, and no difference in the iAbetween the two body positions in the F and F-P regionssFig.3sjdd. While the 2% difference between recumbent and uppedaling resulted in a different classification of the muscle ftion, the close comparison of iACT in the various regions icates that this does not translate into a meaningful differenthe functional role of this muscle.
The similarities observed in muscle function and activityelucidated by the PCFG analysis were also evident in the
n … of muscle burst offset for the two body positions and theined as a=0.05/3 or a=0.0167.
90 rpm 105 rpm
bent upright recumbent upright
1 215±45 150±48 211±3112 122±13 54±11a 120±9a
3a 262±13a 211±15 259±1531 232±27 182±26 234±22
50 103±30 19±56 100±2939 222±26 163±28 215±2455 163±41 131±55 187±5220 14±18 312±29 23±1511 120±10 56±12 120±2514 118±13 57±14 113±13
atioerm
cum
6±50±±1
81±2±69±28±3±3±4±
hand offset analysis conducted over the range of pedaling rates
Transactions of the ASME

ign
Ssclwe-silaerer
witep
is-hupea
aliness oonae
r ponxo
th
istaandr p
wildinphaula
ed
line ramde
leeteiatth
onvinou
suruaelet ontsnvif eph
tivi
ronecn
ld bes to
stem-nta-out-
ed anf therightima-
rankkneethefunc-thethere-
totingte are
e-ional
tto,Pat-
ch.,
, T.,tricalns,”
imalrcise,
imbs,” J.
tricalespi-bmaxi-
se,al ofise
oor-
ling
ns toack-
aling:
scleio-
ityech.,
e andxer-
rated, andk
ove-
studied. The statistical analyses indicated that there were scant body-position effects on burst onset timingsbut at only onepedaling rate each for MGAS, TA, and VASMd and offset timingsbut at only one pedaling rate each for BF, GMAX, and LGAdsTables 3 and 4d. Though the analyses indicated that the muburst onset and offset angles for the two body positionsdifferent in absolute terms for the above six cases, the phasetrends for the muscles, with the exception of TA, were simThe phase-shift trends for BF, RF, and VASM advanced earlithe crank cycle as pedaling rate increased similar to the obstions of Neptune et al.f8g and Marsh and Martinf13g. LGAS andMGAS burst onset and offset shifted later in the crank cycleincreased pedaling rate for both body positions. Similar to Ntune et al.f8g, TA onset and offset timing did not exhibit a dcernable trend in either the recumbent or upright position. Tsimilar adaptations between the two body positions to alteredaling rates indicate that the functional roles of the musclessimilar in these positions.
The results of the PCFG analysis for recumbent pedpresent new information on the coordination of the leg musclrecumbent pedaling. This information on the functional rolethe leg muscles provides a foundation by which to form functigroups, such as power-producing and transition muscles. Thsults indicate that the GMAX and the vastiisVASL and VASMdmuscles comprise the extensor group of the extensor/flexosFig. 1d that serve to generate power for the crank and limb. Nof the muscles examined in this study were classified as fleThe RF and TA muscles comprised the proximal group, andhamstringssBF and SMd and triceps suraesLGAS, MGAS, andSOLd muscles comprised the distal group of the proximal/dpair sFig. 1d that transfer energy from the limb to the crankthereby effect smooth transitions between the extensor/flexof7g.
The formation of functional groups in recumbent pedalingaid in the development of simulations to further our understanof task-oriented muscle coordination. For example, alternateing of similar pairs of functional groups has resulted in simtions of different tasks in upright pedalingse.g., maximumstart-up pedaling in the forward direction and steady-state ping in the forward and backward directionsd that agree well withmeasured kinematics, kinetics, and EMGf7,9,21,31g.
The formation of the functional groups in recumbent pedaalso provides a basis to develop recumbent pedaling exercistines that address the needs of specific populations. One exapplication would be to develop forward dynamic simulationssigned to determine electrical stimulation patterns that enabdividuals with spinal cord injury to pedal a recumbent ergomto prevent the incidence of secondary complications assocwith disuse of the legs. Based on their functional roles,muscles included in the model could be partitioned into functigroups with all muscles included in a functional group receithe same excitation signal. The forward dynamic simulation cthen compute stimulation patterns to satisfy a task objectivese.g.,stimulation patterns that either provide the best fit to the meakinetic and kinematic data obtained from able-bodied individas they pedaled a recumbent ergometer or evenly distributforce generated by all activated muscles over the crank cycd.
The results of this study could also aid in the developmentraining routines and equipment for microgravity environmeAs the time periods that individuals spend in microgravity eronments increase in both duration and frequency, a form oercise that inhibits cardiovascular deconditioning, muscle atroand bone demineralization is important. Pedaling is an acthat holds great promise in microgravity environmentsf32,33g.The recumbent pedaling position is well suited for this enviment because the seatback would provide a reaction force nsary to enable an individual to pedal at high work rates and
“float” away. Through the use of forward dynamic simulations oJournal of Biomechanical Engineering
ifi-
erehiftr.inva-
h-
sd-re
ginfl
re-
aire
rs.e
l
air
lgs-
-
al-
gou-ple-
in-redealgld
edlsthe
f.-x-y,
ty
-es-ot
recumbent pedaling, exercise protocols and equipment coudesigned to meet specific physiologic training objectivecounter the adverse reactions of microgravity exposure.
In summary, this study showed that the musculoskeletal syinputssi.e., muscle activation patternsd are similar for both recumbent and upright pedaling when adjusted for the different orietion in the gravity field. Because the musculoskeletal systemputs si.e., segment kinematics and kineticsd are also similar, thPCFG analysis used previously for upright pedaling provideeffective means by which to determine the functional roles oleg muscles in recumbent pedaling. In both recumbent and uppedaling, the uniarticular hip and knee extensors function prrily to produce power during the extension region of the ccycle, whereas the biarticular muscles crossing the hip andfunction to propel the leg through the transition regions ofcrank cycle. The muscles comprising the triceps surae grouptioned to transfer power from the leg to the crank throughdistal transition region. The ankle dorsiflexor functioned to aidtransition from leg flexion to extension during the proximalgion. Muscle onset and offset timing responded similarlychanges in pedaling rate for the two body positions, indicathat the adaptations of the muscles to changes in pedaling raalso similar for the two body positions.
AcknowledgmentThis work was supported in part by NIH NICHD National R
search Service Award HD08298-04 and, in part, by the NatInstitute for Disability Related ResearchsNIDRRd sAward Num-ber H133G0200137d.
Referencesf1g Gregor, S. M., Perell, K. L., Rushatakankovit, S., Miyamoto, E., Muffole
R., and Gregor, R. J., 2002, “Lower Extremity General Muscle Momentterns in Healthy Individuals During Recumbent Cycling,” Clin. Biome17s2d, pp. 123–129.
f2g Hooker, S. P., Figoni, S. F., Rodgers, M. M., Glaser, R. M., MathewsSuryaprasad, A. G., and Gupta, S. C., 1992, “Physiologic Effects of ElecStimulation Leg Cycle Exercise Training in Spinal Cord Injured PersoArch. Phys. Med. Rehabil.,73s5d, pp. 470–476.
f3g Diaz, F. J., Hagan, R. D., Wright, J. E., and Horvath, S. M., 1978, “Maxand Submaximal Exercise in Different Positions,” Med. Sci. Sports Exe10s3d, pp. 214–217.
f4g Perell, K. L., Gregor, R. J., and Scremin, A. M. E., 1998, “Lower LCycling Mechanics in Subjects With Unilateral Cerebrovascular AccidentAppl. Biomech., 14s2d, pp. 158–179.
f5g Faghri, P. D., Glaser, R. M., and Figoni, S. F., 1992, “Functional ElecStimulation Leg Cycle Ergometer Exercise: Training Effects on Cardiorratory Responses of Spinal Cord Injured Subjects at Rest and During Sumal Exercise,” Arch. Phys. Med. Rehabil.,73s11d, pp. 1085–1093.
f6g Nash, M. S., Bilsker, S., Marcillo, A. E., Isaac, S. M., Botelho, L. A., KloK. J., Green, B. A., Rountree, M. T., and Shea, J. D., 1991, “ReversAdaptive Left Ventricular Atrophy Following Electrically-Stimulated ExercTraining in Human Tetraplegics,” Paraplegia,29s9d, pp. 590–599.
f7g Raasch, C. C., Zajac, F. E., Ma, B., and Levine, W. S., 1997, “Muscle Cdination of Maximum-Speed Pedaling,” J. Biomech.,30s6d, pp. 595–602.
f8g Neptune, R. R., Kautz, S. A., and Hull, M. L., 1997, “The Effect of PedaRate on Coordination in Cycling,” J. Biomech.,30s10d, pp. 1051–1058.
f9g Neptune, R. R., Kautz, S. A., and Zajac, F. E., 2000, “Muscle ContributioSpecific Biomechanical Functions Do Not Change in Forward Versus Bward Pedaling,” J. Biomech.,33s2d, pp. 155–164.
f10g Raasch, C. C., and Zajac, F. E., 1999, “Locomotor Strategy for PedMuscle Groups and Biomechanical Functions,” J. Neurophysiol.,82s2d, pp.515–525.
f11g Chen, G., Kautz, S. A., and Zajac, F. E., 2001, “Simulation Analysis of MuActivity Changes With Altered Body Orientations During Pedaling,” J. Bmech., 34s6d, pp. 749–756.
f12g Brown, D. A., Kautz, S. A., and Dairaghi, C. A., 1996, “Muscle ActivPatterns Altered During Pedaling at Different Body Orientations,” J. Biom29s10d, pp. 1349–1356.
f13g Marsh, A. P., and Martin, P. E., 1995, “The Relationship between CadencLower-Extremity EMG in Cyclists and Noncyclists,” Med. Sci. Sports Ecise, 27s2d, pp. 217–225.
f14g Goto, S., Toyoshima, S., and Hoshikawa, T., 1976, “Study of the IntegEMG of the Leg Muscles During Pedaling at Various Loads, FrequencyEquivalent Power,” inBiomechanics V, Komi, P. V., editor, University ParPress, Baltimore, pp. 246–252.
f15g Winters, J. M., and Stark, L., 1985, “Analysis of Fundamental Human M
f ment Patterns through the Use of in-Depth Antagonistic Muscle Models,”APRIL 2005, Vol. 127 / 309

ent
ling
aselec
, anng.,
a foami
Syn,” J
on-.
ogy
eren-aphic
lationriti-
Or-nta-s.
s
ative
ti-s:s,
asePed-
P. E.,ng
rom
IEEE Trans. Biomed. Eng.,32s10d, pp. 826–839.f16g Winter, D. A., 1990,Biomechanics and Motor Control of Human Movem,
Wiley, New York.f17g Delagi, E. F., Perotto, A., Iazzetti, J., and Morrison, D., 1974,Anatomic Guide
for the Electromyographer: The Limbs, Charles C. Thomas, Springfield.f18g Nilsson, J., Panizza, M., and Hallett, M., 1993, “Principles of Digital Samp
of a Physiologic Signal,” Electroencephalogr. Clin. Neurophysiol.,89s5d, pp.349–358.
f19g Hodges, P. W., and Bui, B. H., 1996, “A Comparison of Computer-BMethods for the Determination of Onset of Muscle Contraction Using Etromyography,” Electroencephalogr. Clin. Neurophysiol.,101s6d, pp. 511–519.
f20g Zajac, F. E., 1989, “Muscle and Tendon: Properties, Models, ScalingApplication to Biomechanics and Motor Control,” Crit. Rev. Biomed. E17s4d, pp. 359–411.
f21g Neptune, R. R., and Hull, M. L., 1998, “Evaluation of Performance CriteriSimulation of Submaximal Steady-State Cycling Using a Forward DynModel,” J. Biomech. Eng.,120s3d, pp. 334–341.
f22g Winters, J. M., and Stark, L., 1988, “Estimated Mechanical Properties ofergistic Muscles Involved in Movements of a Variety of Human JointsBiomech., 21s12d, pp. 1027–1041.
f23g Pruitt, A. L., 1988, “The Cyclist’s Knee: Anatomical and Biomechanical Csiderations,” inMedical and Scientific Aspects of Cycling, E. R. Burke and MM. Newsom, eds., Human Kinetics, Champaign, IL. pp. 16–24.
f24g Sanner, W. H., and O’Halloran, W. D., 2000, “The Biomechanics, Etioland Treatment of Cycling Injuries,” J. Am. Podiatr Med. Assoc.,90s7d, pp.
354–376.310 / Vol. 127, APRIL 2005
d-
d
rc
-.
,
f25g Pare, E. B., Stern, J. T., Jr., and Schwartz, J. M., 1981, “Functional Difftiation Within the Tensor Fasciae Latae, A Telemetered ElectromyogrAnalysis of Its Locomotor Roles,” J. Bone Jt. Surg., Am. Vol.63s9d, pp.1457–1471.
f26g ter Haar Romeny, B. M., van der Gon, J. J., and Gielen, C. C., 1984, “ReBetween Location of a Motor Unit in the Human Biceps Brachii and Its Ccal Firing Levels for Different Tasks,” Exp. Neurol.,85s3d, pp. 631–650.
f27g Burke, R. E., 1981, “Motor Units: Anatomy, Physiology, and Functionalganization,” inHandbook of Physiology: A Critical, Comprehensive Presetion of Physiological Knowledge and Concepts, J. M. Brookhart, et al. edVol. 2, American Physiological Society, Bethesda, MD.
f28g Basmajian, J. V., and De Luca, C. J., 1985,Muscles Alive. Their FunctionRevealed by Electromyography, Williams & Wilkins, Baltimore.
f29g Neptune, R. R., and Herzog, W., 1999, “The Association Between NegMuscle Work and Pedaling Rate,” J. Biomech.,32s10d, pp. 1021–1026.
f30g Hull, M. L., and Hawkins, D. A., 1990, “Analysis of Muscular Work in MulSegmental Movements: Application to Cycling,” inMultiple Muscle SystemBiomechanics and Movement Organization, S. L. Y. Woo and M. J. Wintereds., Springer-Verlag, New York. pp. 621–638.
f31g Ting, L. H., Kautz, S. A., Brown, D. A., and Zajac, F. E., 1999, “PhReversal of Biomechanical Functions and Muscle Activity in Backwardaling,” J. Neurophysiol.,81s2d, pp. 544–551.
f32g Antonutto, G., Capelli, C., Girardis, M., Zamparo, P., and di Prampero,1999, “Effects of Microgravity on Maximal Power of Lower Limbs DuriVery Short Efforts in Humans,” J. Appl. Physiol.,86s1d, pp. 85–92.
f33g di Prampero, P. E. and Narici, M. V., 2003, “Muscles in Microgravity: F
Fibres to Human Motion,” J. Biomech.,36s3d, pp. 403–412.Transactions of the ASME