Embed Size (px)
Citation preview

Noname manuscript No.(will be inserted by the editor)
Four-Objective Formulations of Multicast Flows ThroughEvolutionary Routing with QoS and Traffic Engineering
Marcos L. P. Bueno · Gina M. B. Oliveira
Received: date / Accepted: date
Abstract In this work, we investigate multiobjective
formulations of multicast routing, in which a tree must
be set to deliver data to a subset of destination nodes
in a network. Two four-objective formulations are con-
sidered, for which we propose a multiobjective evolu-
tionary model, composed by the well-known SPEA2
(Strength Pareto Evolutionary Algorithm 2) scheme as
underlying search, and three heuristics (h2, h3 and h4)
incorporated into crossover and mutation operators. Over
seven instances of the problem and five metrics to assess
convergence, diversity and coverage, our designed ex-
periments showed that the combined heuristic (namely,
h4) overcame heuristics h2 and h3 on convergence, while
returning solutions that covered the objective space
as well as heuristic h2. Such analysis was reinforced
through non-parametrical statistical significance tests,
followed by a comparison of our model with well-known
Dijkstra’s and Takahashi-Matsuyama algorithms, show-
ing that our genetic model returned better solutions.
Keywords multicast routing · traffic engineering ·multiobjective optimization · genetic algorithm ·heuristics
1 Introduction
In computer networks, a routing algorithm is responsi-
ble for calculating paths in which data flows will tran-
sit between network links. In such context, the network
Marcos Luiz de Paula Bueno and Gina Maira Barbosa de Oliveira
Faculty of Computer Science - Federal University of Uberlandia
- Av. Joao Naves de Avila 2160, Bloco B. Uberlandia, MinasGerais, 38400-902, Brazil
Tel/Fax: +55 34 3239 4144
E-mail: [email protected]: [email protected]
topology is usually modeled as a connected graph, in
which vertices represent routers, while edges represent
physical links. Depending on the purpose of the data
transmission between network nodes (hosts, routers,
etc.), several kinds of routes can be established. For
instance, unicasting corresponds to transmit data in a
point-to-point fashion, being largely used in the Inter-
net [33]. On the other hand, broadcasting is another
kind of data transmission, in which data is sent to all
destinations, used, for example, to transmit weather re-
ports, live radio programs or when routers exchange
information related to network topology in link state
protocols [21].
Many algorithms are used to compute such routes,
like Dijkstra’s and Bellman-Ford ones [10] for the uni-
cast case, and Dalal & Metcalfe’s reverse path forward-
ing [13], spanning trees and flooding mechanism [33]
for the broadcast case. In the Best Effort service es-
tablished in the Internet, these algorithms can provide
good quality of routes when only one metric is con-
sidered at any given time. More specifically, when such
metric is an end-to-end one (e.g. end-to-end delay, hops
count), algorithms like Dijkstra’s can guarantee the op-
timality of unicast routes, since the problem is the same
of calculating shortest paths in graphs.
Multicasting, in turn, is intended to send data to a
subset of hosts in the network. The main motivation to
this kind of transmission is to save network resources,
duplicating packets only when routing paths branches.
A multicast route is, then, modeled as a tree, in which
data is sent from a source node, passing by several inter-
mediary nodes to reach destination ones. In this sense,
it can be cheaper than establishing multiple unicast
transmissions to deliver data through a path to each
destination, and significant economies over unicast can
be achieved. The study of pricing policies and tariffs is

2
an important issue in this context, due to these different
features of unicast and multicast [9]
The difficulty of multicast problem is the same of
shortest path calculation when the metric to be op-
timized is an end-to-end one, like end-to-end delay or
end-to-end hops count, since the problem is, in fact, the
same of calculating optimal unicast paths. However, if
one wants to optimize some metric related to the tree,
such as its cost or its length (i.e. the number of edges),
the problem would become the well-known Steiner Tree
Problem in Graphs (STP), which is known to be in the
NP-hard class of problems, as showed by Karp [18].
Moreover, in many applications of multicasting (e.g.
multimedia ones) the route quality is related to the
achievement of multiple requirements, such as fast com-
munication with low delay, reliably and low cost. Re-
quirements like these are related to Quality of Service
(QoS) concept [30], [33], which deal with special treat-
ments required by a service to provide performance as-
surances, impacting on the user’s satisfaction.
On the other hand, Traffic Engineering (TE) is con-
cerned with improving network performance aiming to
reduce congestion bottlenecks, improve resource utiliza-
tion and also to provide adequate QoS for final users
[3]. Such aims can be achieved by establishing routes
in such a way that the traffic distribution is balanced.
When QoS and TE requirements are also being consid-
ered in multicast routing, it leads to the need of opti-
mizing a set of objectives subject to constraints. Thus,
different conflicting objectives are established and the
route calculus can be seen as a multiobjective problem
[15].
Given a weighted network and a new multicast flow
φ to be loaded on it, in the Multicast Flow Routing
Problem (MFRP) we want to calculate Pareto-optimal
trees to carry that flow over the net. Two formulations
of MFRP were considered in this work, minimizing the
following objective functions: maximum link utilization,
total cost, maximum end-to-end delay, mean end-to-end
delay and hops count, subject to a link capacity con-
straint. Since MFRP can be considered as an extension
of the Steiner Tree Problem, many techniques have been
used to tackle MFRP, such as heuristics, approximation
algorithms and related artificial intelligence techniques
[1], [4], [14], [15], [26], [32], [2], [31]. In this work, we
use multiobjective evolutionary algorithms (MOEAs)
to tackle MFRP, since they have been used in several
works ([27], [39], [12], [22], [11], [25], [24], [23], [6]) with
promising results. SPEA2 (Strength Pareto Evolution-
ary Algorithm 2) is one of the most successful MOEAs
investigated in the literature [40], [43], [42], [41].
This work evaluates three heuristics for crossover
and mutation operators incorporated along multiob-
jective evolutionary algorithms (MOEAs) designed to
solve MFRP. Such heuristics are evaluated with a SPEA2-
based environment, through experiments with seven in-
stances of MFRP and five metrics to assess convergence
and diversity. In our designed scenarios, we were able
to conclude that when combined with one of the heuris-
tics (heuristic h4), SPEA2 returned the best results on
the overall average by a significant percent, compared
to SPEA2 with the other two heuristics. A comparison
with traditional algorithms from the literature (Dijk-
stra’s and Takahashi-Matsuyama [32]) is carried out,
showing that our evolutionary environment can provide
better solutions than those algorithms in most cases.
Besides, if small levels of tolerance over delay and cost
are allowed, more expressive gains can be obtained for
the other objective functions, when compared with the
solutions provided by these algorithms.
The remainder of this paper is organized as follows:
in Section 2 a description of Multicast Routing Problem
tackled in this paper is presented; Section 3 briefly re-
lates a few related works from the literature; the un-
derlying model is presented at Section 4, while the pro-
posed heuristics are shown in Section 5; finally, the ex-
perimental results and final remarks are discussed in
sections 6 and 7.
2 Multicast Flow Routing Problem
In this work, routing with QoS and TE requirements
is considered under a multiobjective optimization view.
In that case, it may not be possible to optimize all ob-
jectives simultaneously, because when optimizing one
or more objectives, we could deteriorate another(s).
If that is the case, it may not exist a solution that
has, simultaneously, optimal values for each objective.
Due to this conflict, we use a strict partial order rela-
tion known as Pareto dominance[29]: given two n-
dimensional decision vectors a and b and their respec-
tive objective vectors f(a) = {f1(a), . . . , fm(a)} and
f(b) = {f1(b), . . . , fm(b)}, we say a dominate b (a ≺ b,
in symbols) iff:
– a is not worse than b in any objective; and
– a is strictly better than b in at least one objective.
In a Pareto dominance relation, for any two vectors
a and b, may not occur a ≺ b nor b ≺ a. Inside a set of
solutions, those for which there is no other that dom-
inates them are called nondominated solutions. Thus,
in a global sense, if P is the entire decision space, then
a feasible solution x∗ ∈ P is called Pareto-optimal so-
lution iff 6 ∃x ∈ P, x ≺ x∗. The set composed by all
Pareto-optimal solution is called global Pareto-optimal
set, denoted by P ∗.

3
Considering a multicast context, the network topol-
ogy is modeled as a connected undirected graph G =
(V,E,W ), such that V represents a set of nodes or ver-
tices, E a set of edges and W a tuple o weights. We de-
fine r ∈ V as the source or root node and a set D ⊂ Vas the multicast group, in which each node is called
destination or terminal. For each edge e in G, there is
a tuple W = (c(e), d(e), z(e), t(e)), corresponding to an
edge’s cost, delay, capacity and current traffic, respec-
tively, which are defined on R. Since each edge has a
capacity, we have the following restriction over the traf-
fic passing by it at any moment: t(e) ≤ z(e),∀e ∈ E.
Finally, there is a new traffic request φ ∈ R that we
want to load on G.
Thus, in Multiobjective Multicast Flow Routing Pro-
blem (MFRP), given an instance (G, r,D, φ), we want
to calculate trees T = (VT , ET ) of G, rooted in r, with
{r} ∪D ⊆ VT , such that T will allow the loading of φ
into G. In order to load φ into G, every feasible can-
didate T (also called multicast tree) must attend the
constraint t(e) + φ ≤ z(e),∀e ∈ ET . We also want to
minimize five objective functions for each T :
a. Cost of the tree:
cost(T ) =∑e∈ET
c(e) (1)
b. Mean end-to-end delay:
D(T ) =
∑delay(ti)
|D|(2)
c. Maximum end-to-end delay:
D(T ) = max {delay(ti)} , i = 1, . . . , |D| (3)
d. Hops count:
hops(T ) = |ET | (4)
e. Maximum link utilization (bottleneck):
α(T ) = max
{t(e) + φ
z(e)
},∀e ∈ ET (5)
We consider the following constraint:
f. Edge’s capacity:
t(e) + φ ≤ z(e) (6)
where e ∈ ET and delay(ti) =∑
e∈path(r,ti) d(e),∀ti ∈D. Thus, given the two formulations for MFRP below
(Multiobjective Optimization Problems or MOPs), we
want to calculate the Pareto-optimal set of solutions,
such that:
– P1: min α(T ), cost(T ), D(T ) and hops(T )
subject to Eq. 6.
– P2: min α(T ), cost(T ), D(T ) and D(T )
subject to Eq. 6.
An instance of MFRP is shown on Figure 1, con-
sisting on a network with 18 nodes, in which node 0 is
the source and nodes 6, 10, 13, 15, 17 are the terminal
ones. For each edge e, the weights cost, delay and cur-
rent traffic (c(e), d(e), t(e)) are explicit presented. On
the other hand, capacity z(e) is considered fixed for all
the edges (z(e) = 12 Mbps,∀e ∈ E) and it is omitted
in the figure. A Pareto-optimal solution for such G, D,
r and φ = 2.0 Mbps on P1 and P2 is showed by the
tree on right side of the figure, along with its objective
values.
Fig. 1: A MFRP instance on left (φ = 2.0), and a
Pareto-optimal solution on right, whose objectives are
α(T ) = 0.85, cost(T ) = 71 ∗ 2.0, D = 9.8, D(T ) = 12
and hops(T ) = 9.
3 Related Literature
Due to the computational complexity of routing pro-
blem, there is a large number of works focusing on its
variations. For the Unicast Routing Problem (URP)
with one objective, there are efficient algorithms for
shortest path calculation, such as Bellman-Ford’s and
Dijkstra’s [10], which are used in RIP and OSPF pro-
tocols [33]. On the other hand, URP with two or more
aditive and/or multiplicative metrics is a NP-complete
problem, as proved in [37], in which efficient algorithms
were presented for a simplified decision version for URP.
On the other hand, multicast routing and Steiner
problems (STP) have been tackled in several investi-
gation lines. Dreyfus and Wagner [14] proposed an ex-
act algorithm to solve STP with complexity O∗(3|D|),
based on dynamic programming and using a shortest
path algorithm to calculate Steiner subtrees as the main
idea. There are also several heuristics procedures for
STP. In [2] it is proposed a local optimization procedure

4
with Takahashi-Matsuyama heuristic [32]. Such heuris-
tic uses Dijkstra’s algorithm to build a solution from a
incremental union of a shortest path from each desti-
nation to the current tree – an idea similar to Prim’s
algorithm [10]. Other approaches with various kinds
of metaheuristic models, such as GRASP [31], Parti-
cle Swarm Optimization (PSO) [36], Simulated Anneal-
ing [38] and Tabu Search [16], were proposed in recent
years.
In a very useful variation of the Steiner Tree Pro-
blem (also known as Constrained STP or CSTP) in
routing applications, a heuristic is proposed in [28] con-
sidering maximum end-to-end delay and delay variation
metrics, which main idea is the creation of solutions
from K shortest paths computation. Kompella et al.
[19], in turn, proposed a dynamic programming-based
heuristic to tackle CSTP with maximum delay restric-
tion. Ravi [26] presents approximation algorithms com-
bined with local optimization for several variations of
Steiner problem.
Several works use genetic algorithm-based approaches
for variations of Multicast problem. In [27] the authors
presents a mono-objective genetic algorithm (GA) using
the objectives cost, delay and bandwidth aggregated in
a weighted expression. Such GA model was improved
in [39], adding changes in crossover and using elitism
in reinsertion. The model presented in [22] was based
on those works, fulfilling some gaps left there, like the
choice of reconnection algorithm in crossover and mu-
tation. Such work also proposed a mechanism to in-
crease population diversity called filter. The authors in
[23] proposed a model also based on the one described
in [27], but in multiobjective perspective, where they
applied several MOEAs based on the family of NSGA
(Non-dominated Sorting Genetic Algorithm) methods
- NSGA, NSGA-II and ε-NSGA-II - also evaluating a
few crossover changes.
Regarding Routing with flows, a NSGA-based [43]
MOEA with 3 objectives and 1 restriction was proposed
in [12], using an entropy mechanism to increase pop-
ulation diversity. In [11] it is proposed a SPEA-based
approach with four-objective and one constraint, devel-
oping a crossover and mutation based on pre-calculated
shortest paths, while in [25] the authors also used a
SPEA-based approach, but using 5 objective functions.
A survey in which are evaluated a large number of GAs
proposals for routing is presented in [15], where they
also propose a SPEA-based MOEA considering 11 ob-
jective functions and some statistical analysis, such as
correlation between objective functions.
4 Evolutionary Routing
4.1 Multiobjective Evolutionary Algorithms
Genetic Algorithms (GAs) are stochastic search meth-
ods for problem solving, inspired on biological evolution
theory [17]. The main metaphor with the biological the-
ory is that the more adapted individuals in their envi-
ronment tend to survive and reproduce, hoping that
their offspring should be at least adapted as their par-
ents. In this manner, from natural selection and genetic
inheritance, it is expected to occur the evolution of pop-
ulation. GAs are also included on metaheuristic meth-
ods, since they use some kind of approximated infor-
mation (the fitness value) to guide the search towards
more promising points, to achieve the optimal solution.
Multiobjective Evolutionary Algorithms (MOEAs)
are evolutionary algorithms designed to approach prob-
lems that includes more than one objective to optimize,
usually considering the Pareto dominance relation. The
main difference between a classic GA and a MOEA usu-
ally lies on fitness assignment, where dominance can be
used in different ways. This work deals with the model
SPEA2 from the second generation of MOEAs, briefly
described in the following.
Strength Pareto Evolutionary Algorithm 2 (SPEA2)
[42] is a MOEA proposed by Zitzler et al., character-
ized by maintaining, besides the current population, an
external file to keep the non-dominated solutions found
so far. The procedure to calculate fitness is based on
the ideas of dominance count and dominance rank [41],
which refer to how many individuals are dominated by
each individual, and how many individuals that dom-
inate it, respectively. Such procedure encompasses the
concept of using one population to evaluate another.
SPEA2 came to improve its predecessor SPEA [43],
mainly in three aspects. Firstly, providing a more com-
plete assignment of fitness, in which dominance infor-
mation among population members is considered, since
in SPEA the fitness of population members depends on
the strength (the number of individuals that it domi-
nate) of its dominators only, possible leading to a reduc-
tion over the selection pressure. Another difference with
SPEA is that, for each individual, a density estimation
is used to guide the search more efficiently, specially
when there are many non-dominated individuals in the
current generation, being used to differentiate between
them. Finally, another procedure (based on k-th near-
est neighbor) to reduce the cardinality of the external
archive is proposed, where extreme solutions are pre-
served.
In a previous paper [7], several experiments were
performed and it was possible to verify that SPEA2

5
overcame SPEA in MFRP, through several metrics on
various instances. The present work focus on a compre-
hensive evaluation of crossover heuristics through punc-
tual estimations and statistical significance tests, and
showing a comparison with traditional algorithms used
in Routing and Steiner’s literature, as shown in Section
6.
4.2 The Proposed Model
In the following, we describe the major aspects of the
evolutionary models implemented in the present work
to solve MFRP. These steps were based on the original
mono-objective model proposed in [27] and refined in
the subsequent mono-objective models in [39] and [22].
The major steps of the model described in [27] were
also used in the multiobjective models proposed in [25]
and [23], where [23] uses NSGA-II and [25] uses SPEA
as underlying multiobjective approaches. The remain-
ing steps omitted here are discussed in these previous
works, specially in reference [23].
4.2.1 Initial population
Each individual is codified directly as a generic rooted
tree, as exemplified in right side of Figure 1. Each tree
is generated by a random search algorithm, in which
nodes are randomly inserted in the tree until all desti-
nation nodes are inserted. Then, a pruning is applied
over the tree, so that every leaf node will be a destina-
tion one. Note that this algorithm has the same worse
case complexity of breadth-first or depth-first search,
i.e., O(|E| + |V |) since the only difference is that we
choose the next neighbor to expand in a random way,
instead of using a queue or a stack.
4.2.2 Crossover
The crossover operator presented here is based on the
general scheme proposed in [27] and [23]. From two par-
ents, a child inherit their features following these gen-
eral steps:
(i) identification of common edges between two par-
ents, resulting in a forest of subtrees;
(ii) random choice of a weight of G (cost, delay or
current traffic) to be used along reconnections;
(iii) reconnection of subtrees, resulting on a new mul-
ticast tree containing all destination nodes; and
(iv) pruning of useless nodes, i.e., a recursive proce-
dure that remove terminal nodes of the tree that
are not destination ones.
An example of this scheme is shown in Figure 2.
The main focus of this work lies on the heuristic used
in subtrees reconnection (step iii). Section 5 describes
the heuristics investigated in the present work.
parent 1 parent 2 step i step iii step iv T
0
1 12
10
9
11
5
13
8
0
3
7
5
10
9
8 11
1
0
1
10
9
11
5
8 0
1 6
9
11
2
4
8
10
5
0
1 6
9
11
2
4
8
10
5
0
1 6
9
11
2
4
8
Fig. 2: Crossover steps, considering D = {1, 8, 11}. Leg-
end: (i): common subtrees to the parents (subtrees in
bold); (iii): subtrees reconnection (added vertices in
bold); (iv): pruning (removed vertices are marked).
4.2.3 Mutation
The mutation operator consists in a random pick of
a set of nodes from a multicast tree and remove their
edges, i.e., for each node in such set, remove its edge
with its parent and its edges with its children. Then, we
will obtain a set of unconnected subtrees, which must
be reconnected as in crossover. Thus, the complexity of
this operator is the same as crossover’s complexity. The
reconnection methods discussed in the next section can
be also applied to mutation operator.
4.3 Multiobjective Evolution Process
A routing environment with a MOEA as the under-
lying evolutionary search was constructed to calculate
the multicast routes, based on the genetic operators
just described. This environment was developed follow-
ing the description of SPEA2. We describe the steps of
this routing algorithm on Alg. 1.
5 Heuristics to Reconnect Subtrees
During subtrees reconnection we aim to build a new
multicast tree T from a forest of subtrees s = {s1, s2, ..., sk}.Each si is obtained by a procedure that calculates the
common edges of two trees. Moreover, if the root r or
any destination node are not in those common edges, we

6
Algorithm 1 SPEA2-based routing algorithm
Input: Npop: number of multicast trees in population P ;
Nger: number of generations; L: maximum size of E.Output: E: a set of non-dominated multicast trees found
during the search.
1: Generate an initial population P0 with Npop random multi-
cast trees
2: E0 ← ∅3: t← 0
4: while true do
5: Calculate fitness for each tree of Pt ∪Et, according to theformulation (P1 or P2)
6: Assign Et+1 with non-dominated trees from Pt ∪ Et
7: if |Et+1| < L then Fill Et+1 with the fittest dominatedtrees from P
8: else if |Et+1| > L then Apply truncation procedure toreduce Et+1 size
9: if t > Nger then
10: Return non-dominated trees from Et+1 (end of exe-
cution)
11: Select Npop pairs of trees (parents) from Et+1 using afitness-based binary tournament
12: Apply crossover and mutation over the parents to gener-
ate Pt+1
13: t← t+ 1
build and add isolated subtrees, i.e., subtrees that con-
tains only one vertex, into s. We start the reconnections
randomly selecting subtrees si and sj and calculate a
set p of edges such that si ∪ p ∪ sj will be a connected
subgraph of G. In the following reconnections, we se-
lect another subtree and calculate a new set p between
it and the subgraph obtained on the previous reconnec-
tion. Therefore, |s|−1 reconnections will be made until
all subtrees are reconnected to produce a new tree with
all destination nodes.
An important decision that affects the convergence
of GA to optimal solutions is how to choose the edges
of p; this aspect is explored by the heuristics described
next. Heuristics h2 and h3 were also presented in a sim-
plified form on references [6], [7]. Heuristic h2 have an
O(|V |2) worse case complexity, while h3 and h4 have
an O(|V ||E| log |V |) complexity.
5.1 Heuristic h2
Heuristic h2 is based on the original heuristic proposed
by Ravikumar & Bajpai [27], but includes some im-
provements to avoid the potential occurrence of loops.
It uses a shortest path algorithm to select a set p of
edges at each reconnection. Here we employed the same
shortest path method used in [22] and [23]: Dijkstra’s
algorithm. The use of such algorithm is an attempt to
improve the fitness of each individual, being interesting
under runtime perspective, since it has O(|E| log |V |)
time complexity if a binary heap is used [10]. Lines 1
and 3-12 on Alg. 2 defines h2.
In Algorithm 2, the general idea is that, after initial-
izing T , the reconnection loop builds T from successive
reconnections with others si by calculating a shortest
path p. In other words, we randomly pick the next si,
and calculate the shortest path p between it and T . A
procedure to rotate si is called to change its root, en-
suring that the root of s‘i will be the last vertex of p.
However, each time a shortest path p is calculated, it is
possible that it include vertices from one or more sub-
trees of s not yet reconnected. Thus, since we will have
to join those remaining subtrees from s in a posterior
reconnection, loops would be formed in T .
The test to check whether would occur a conflict
when joining T and s‘i consists in checking if p has only
one edge with the same ends. If there is a conflict, h2
strategy determines to insert only edges (x, y) from s‘isuch that the vertex y does not exist in T . That is
because, if we allow such insertion, the vertex y would
be repeated in tree T , what would turn the solution an
invalid one. On the other hand, if there is no conflict, we
unite T with p and s‘i. This whole reconnection process
is done until there are no more subtrees to reconnect
with T .
5.2 Heuristic h3
Differently from the previous method, in h3 the parent
similarity information is never lost when reconnecting
subtrees. The shortest path calculation is not used by
h3, in which the path p is randomly calculated. Lines 1
and 14 to 21 of Alg. 2 formalize this process.
The heuristic h3 starts with T corresponding to the
subtree which contains root node. Then, T is randomly
filled in with the same idea of random search algorithm
used in initial population generation, until appears a
node existing in any subtree si not yet reconnected. At
this moment, we rotate si and unite it with T . The algo-
rithm repeats these operations while there is a subtree
to reconnect.
5.3 Heuristic h4
In previous papers [6], [8], [5], [7], experiments con-
ducted over some instances of MFRP indicated that
h2 returned a better GA convergence. However, in an-
other instances, such behavior was accomplished with
heuristic h3. Thus, heuristic h4 proposes a combination
of heuristics in the following way: at the beginning of a
crossover, after calculation of common subtrees and the
choice of weight of edge, we randomly choose which of

7
the two heuristics will be used to perform reconnections
of subtrees forest s. Thus, h4 is simply a random choice
between h2 and h3 at the beginning of each crossover.
The entire Alg. 2 describes the heuristic h4. Notice that,
using heuristic h4 the validity of final T is preserved, be-
cause on this scheme each crossover can be done using
h2 or h3, which generates only valid trees as discussed
previously.
Algorithm 2 Heuristic h4 to reconnect subtrees
Input: G = (V,E): connected graph; s: set of subtrees.Output: T = (VT , ET ): a multicast tree rooted in r, such
that D ⊂ VT .
1: T ← s02: if rand = 0 then . will execute h2
3: while there is a subtree to reconnect do4: Randomly pick the next subtree si5: p← shortestPath (T, si)
6: s‘i ← rotate (si, p.end)7: if there is conflict on p then
8: for each edge (x, y) ∈ s‘i do
9: if y /∈ VT then T ← T ∪ {(x, y)}10: else11: T ← T ∪ p12: T ← T ∪ s‘i13: else . will execute h314: while there is a subtree to reconnect do
15: u← pickParent (T )
16: v ← pickChild (G,T, u)17: T ← T ∪ {(u, v)}18: if v exists in any si not reconnected yet then
19: s‘i ← rotate (si, v)20: T ← T ∪ s‘i21: return T
6 Experimental Results
The performance of reconnection heuristics (h2, h3 and
h4) was experimentally evaluated on each of the two
formulations of PFRM over seven instances taken from
Routing and Steiner’s literature [39],[27], [35], [6], pre-
sented in Tab. 1. This table also shows the cardinality
of each reference set P ∗ for each instance. The original
definition of edge’s weights of nets 0, 1 and 2 had val-
ues for cost and delay, while nets 3 to 6 had only values
of cost. Thus, we generated random values for delay
to nets 3 to 6, uniformly distributed over the interval
[1, 15]. Since the weights related to capacity and current
traffic are also needed, random values for that weights
were generated over the interval [1000, 1500] Kbps and
[0, 500] Kbps, respectively, (nets 0 to 6).
The GA parameters - size of population (Npop) and
number of generations (Nger) - were set as: Npop = 30
Table 1: Summary of instances and their cardinalities
of Pareto-optimal sets for each formulation.
Instance |V | |E| |D| |P1∗| |P2∗|0 15 44 5 27 28
1 18 50 5 7 122 33 106 10 122 180
3 50 126 12 40 91
4 75 188 19 72 1285 75 188 38 60 76
6 75 300 13 42 151
and Nger = 50 for networks 0 and 1, and Npop = 90
and Nger = 100 for networks 2 to 7. The probability
of mutation occurrence is 10%, and node disconnection
rate in mutation is 20%
6.1 Metrics to Assess Convergence and Diversity
Regarding the design of experiments to evaluate models
in problems with multiple objectives, two main goals in
multiobjective optimization must be considered: con-
vergence and diversity. The first one assess the quality
of the approximation of a set of solutions P returned
by an algorithm to a reference Pareto-optimal set P ∗.
On the other hand, solutions of P should be well spread
along the objective space, leading us to metrics like cov-
erage of the objective space (e.g. in terms of extreme
solutions). Therefore, many metrics were described in
the literature to evaluate different aspects of these two
goals, in order to provide a set of values that can be
used in the decision making process.
In this work, the following metrics were considered
to assess convergence:
– Error Rate (er): corresponds to the percent of so-
lutions of P that are not Pareto-optimal ones [34].
In symbols:
er =
|P |∑i=1
ei
|P |where ei = 1 if solution i ∈ P is dominated by
any solution of P ∗; otherwise, ei = 0. The bigger
the value of er, the worst will be relative conver-
gence, i.e., the percent of solutions of P that are
not Pareto-optimal solutions. Therefore, this metric
must be minimized.
– Generational Distance (gd): corresponds to the
mean distance between the vectors of P and P ∗ [34].
In symbols:
gd =
√√√√ |P |∑i=1
d2i
|P |

8
where di = minj∈P∗
d(i, j), i.e., for each vector i ∈ P , we
find its nearest vector j ∈ P ∗ in terms of Euclidian
distance. The smaller the value of gd, more closer
to P ∗ will be the set P . Thus, this metric must be
minimized.
– Pareto Subset (ps): corresponds to the absolute
number of solutions of P that are Pareto-optimal
ones:
ps = (1− er)|P |
This metric complement the information given by
er, however in a contrary direction (i.e. the number
of solutions that are Pareto-optimal, instead of the
percent of solutions that are not Pareto-optimal) in
an absolute sense. This metric must be maximized.
Aiming to evaluate the distribution of solutions, the
following metric was considered:
– Maximum Spread (m3): correspond to the sume
of maximum extension obtained on each objective
by a set P [40]. Formally,
m3 =
√√√√ M∑i=1
(max fi −min fi)2
Finally, to directly compare in terms of dominance
two sets of solutions P and Q, we used the metric cov-
erage [40]:
– Two Set Coverage (sc):
sc(P,Q) =|{j ∈ Q;∃i ∈ P : i ≺ j}|
|Q|
The sc metric is not symmetric for two sets P and
Q, therefore, it is necessary to calculate sc(P,Q) and
sc(Q,P ). A value of sc(P,Q) = 1 indicates that all
solutions of Q are dominated by at least one solution of
P , while sc(P,Q) = 0 would indicate that no solution
from Q would be dominated by any solution from P .
6.2 Results on Formulations P1 and P2
The results are shown in tables 2 and 3, in which the
higher level of gray background indicates the best re-
sults on each scenario, while the second level of gray in-
dicates the second best result; the worst result is shown
by a white background. These results are also shown in
a graphical way by figures 3, 4, 5 and 6.
The results on metric er show that nets 0 and 1
seems to be easy instances of MFRP, since all heuris-
tics reached values near to 0, specially h3 and h4. Over
the larger instances (nets 2 to 6), h4 reached the best
results on most cases. Looking at each scenario, h4 re-
turned values for er smaller than 20% in all cases (ex-
cept on net 6/P2) , while the other heuristics reached
values larger than it in some scenarios (reaching values
greater than 40% in some cases), showing less varia-
tion of the means among instances. An observation of
the general means shows that among the solutions re-
turned by h4 on P1 approximately 93% were, in fact,
Pareto-optimal ones, while such percent was 85% and
88% for h2 and h3, respectively. Regarding P2 formu-
lation, h4 also reached the best results on this metric,
returning 85% of solutions that were Pareto-optimal
ones, against 76% and 78% by h2 and h3, respectively.
In other words, the relative convergence (i.e. in terms
of percents) obtained by h4 was better than the ones
from h2 and h3.
Reinforcing these results with the metric ps, h4 also
concentrated the best results, as we can seen by the gray
levels, returning more Pareto-optimal solutions than h2
and h3. The averages indicate that h4 improved 22%
and 27% of the results on P1 obtained by h2 and h3,
respectively. Such gains over h2 and h3 were around
27% in P2. These gains were even more greater in the
larger instances (nets 2 to 6), reaching more than 50%
in some cases (e.g. nets 4 and 6 compared to h3/P1).
Analyzing the last metric for convergence (gd), we
note that since gd = 0 was not obtained by any of the
heuristics, then a value closer to zero indicates that the
dominated solutions of a set P were closer to P ∗ in the
objective space. Thus, observing the results, the solu-
tions returned by h4 were closer to the Pareto-optimal
fronts on almost all instances. The heuristic h2 reached
the worst results on most cases.
The results on m3 diversity metric show that heuris-
tics h2 and h4 achieved the best results on all cases.
However, it is not much clear the difference related to
which is the better, since there is some alternation of
the best result on each instance, although h2 reached
a little higher mean than h4 (7.87 against 7.81 on P1,
respectively). Hypothesis tests will be carried to verify
such differences.
6.3 Statistical Analysis
The previous results were shown through descriptive
statistics, more specifically by means. Since GAs are
stochastic methods and each execution works with ran-
dom samples of solutions from the search space, it is
interesting to use some statistical inference to infer pa-
rameters for a given population using such samples. In
this manner, we are able to infer if the observed dif-
ferences between the heuristics can be considered sig-
nificant or not, for a certain level of confidence α. To

9
Metric Heuristic Instance Mean
0 1 2 3 4 5 6
Error Rate
2 1.22% 4.76% 21.16% 24.00% 7.11% 10.22% 44.65% 16.16%
3 0.51% 0.48% 11.58% 6.69% 14.84% 3.78% 44.59% 11.78%
4 0.65% 1.90% 10.42% 5.27% 7.16% 0.63% 20.63% 6.67%
Pareto Subset
2 21.37 6.37 63.00 25.00 46.37 43.97 19.53 32.23
3 25.60 6.97 68.30 28.07 31.80 45.93 10.60 31.04
4 25.10 6.87 80.47 32.70 50.57 55.07 24.30 39.30
Generational
Distance
2 1.23 9.90 2.08 4.58 0.67 1.22 6.27 3.71
3 0.72 1.23 1.70 1.32 1.69 0.17 5.42 1.75
4 0.46 4.90 1.30 0.45 0.57 0.10 3.74 1.65
Maximum
Spread
2 8.08 8.43 8.64 7.47 8.11 5.33 9.03 7.87
3 8.05 7.97 8.24 7.06 7.69 3.55 5.07 6.81
4 8.08 8.05 8.79 7.34 8.17 5.31 8.92 7.81
Table 2: Values for convergence and diversity metrics on formulation P1. The best results are shown by bold face.
Metric Heuristic Instance Mean
0 1 2 3 4 5 6
Error Rate
2 14.45% 1.57% 28.21% 22.66% 13.79% 31.54% 52.06% 23.47%
3 2.05% 0.00% 18.01% 3.78% 36.16% 28.31% 63.50% 21.69%
4 3.06% 0.00% 17.44% 4.91% 17.18% 16.40% 44.43% 14.78%
Pareto
Subset
2 18.47 8.57 64.27 48.07 49.90 26.20 38.43 36.27
3 25.87 11.43 71.80 61.60 28.20 35.17 18.83 36.13
4 24.50 11.07 74.30 70.17 53.77 44.83 43.63 46.04
Generational
Distance
2 9.60 3.97 2.09 2.45 2.60 1.04 2.86 3.52
3 1.29 0.00 1.54 0.78 4.57 2.92 3.90 2.14
4 2.07 0.00 1.40 0.61 2.37 0.47 2.20 1.30
Maximum
Spread
2 9.36 9.28 9.58 9.03 10.90 6.77 11.28 9.46
3 8.86 9.18 8.84 8.13 9.87 3.24 6.36 7.78
4 8.87 9.18 9.88 9.02 10.98 6.77 11.13 9.41
Table 3: Values for convergence and diversity metrics on formulation P2. The best results are shown by bold face.
accomplish that, we choose the Wilcoxon Signed-Rank
Test [20], a non-parametric hypothesis testing proce-
dure. Such test is a distribution-free one, which means
that it is not necessary that the original probability
distribution must be Normal.
The following hypothesis were formulated, consid-
ering a two-tailed test with α = 10% (5% for each tail):
– H0: µh4 = µhx
– H1: µh4 6= µhx
where µ corresponds to the population value for a given
metric (e.g. er), while hx corresponds to heuristics h2
or h3.
As usual, for such Wilcoxon test, we calculate w =
min(w+, w−), where w+ and w− are the sums of pos-
itive and negative ranks, respectively. Since the size of
our sample is 30, then we can approximate the distribu-
tion of w by a Normal one, with mean µw = n(n+ 1)/4
and variance σ2w = n(n + 1)(2n + 1)/24. Thus, we cal-
culate the test statistic z0 = (w − µw)/σw and verify
if z0 belongs to the critical region, based on reference

10
0,00%
5,00%
10,00%
15,00%
20,00%
25,00%
30,00%
35,00%
40,00%
45,00%
0 1 2 3 4 5 6
Instance
Error Rate (P1)
h2
h3
h4
(a) P1
0,00%
10,00%
20,00%
30,00%
40,00%
50,00%
60,00%
70,00%
0 1 2 3 4 5 6
Instance
Error Rate (P2)
h2
h3
h4
(b) P2
Fig. 3: Charts to represent values for Error Rate over each instance.
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
90,00
0 1 2 3 4 5 6
Instance
Pareto Subset (P1)
h2
h3
h4
(a) P1
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
0 1 2 3 4 5 6
Instance
Pareto Subset (P2)
h2
h3
h4
(b) P2
Fig. 4: Charts to represent values for Pareto Subset over each instance.
scores for a Normal distribution. If z0 does not belong
to the critical region, we accept the null hypothesis. On
the other hand, when z0 belongs to the critical region
and, therefore, the alternative hypothesis is accepted,
we will infer µh4 < µhx if w ← w+, or µh4 > µhx if
w ← w−.
For the metrics to be minimized (er and gd), when
the alternative hypothesis is accepted, the interpreta-
tion of results is as follows:
– µh4 < µhx: h4 was significantly better than hx.
– µh4 > µhx: h4 was significantly worse than hx.
When the metric is to be maximized (ps andm3) the
logic of these signals is inverted. The results of tests are
shown in tables 4 (convergence metrics) and 5 (diversity
metric). Each column has a label, representing which
test was done, i.e., h4 × h2 or h4 × h3.
The tests to compare h4 with h2 on er confirm that
h4 improved the results of h2 on er in most cases by a
significant percent. Considering both formulations, h4
achieved improved results on 9 of 14 scenarios, while h2
achieved better results only in 1 case. In the remaining
cases, no significant difference could be observed. The
heuristic h4 also returned better results than h3, how-
ever is less cases than the comparison with h2. More
specifically, h4 improved 7 of 14 scenarios, while h3 won
only in 1 scenario. In both cases, the improvements of
h4 were more noticeable on the larger instances, reflect-
ing its ability to better explore larger searches spaces.
Analogous results were obtained on tests for ps metric:

11
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
9,00
10,00
0 1 2 3 4 5 6
Instance
Generational Distance (P1)
h2
h3
h4
(a) P1
0,00
2,00
4,00
6,00
8,00
10,00
12,00
0 1 2 3 4 5 6
Instance
Generational Distance (P2)
h2
h3
h4
(b) P2
Fig. 5: Charts to represent values for Generational Distance over each instance.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
9,00
10,00
0 1 2 3 4 5 6
Instance
Maximum Spread (P1)
h2
h3
h4
(a) P1
0,00
2,00
4,00
6,00
8,00
10,00
12,00
0 1 2 3 4 5 6
Instance
Maximum Spread (P2)
h2
h3
h4
(b) P2
Fig. 6: Charts to represent values for Maximum Spread over each instance.
h4 won h2 and h3 by 14 of 14 cases and 11 of 14 cases,
respectively.
Regarding the metric gd, h4 also returned better es-
timations in most cases, more specifically in 12 of 14 and
7 of 14 cases when compared to h2 and h3, respectively.
No improvements obtained by h2 or h3 were significant,
i.e., the remaining cases indicated that the differences
observed in samples were not statistically significant.
On the other hand, analyzing the tests on diver-
sity metric m3, h3 is clearly worse than h4. However,
there is a tight dispute between h4 and h2, in which
h2 reached slightly better results (by only 1 scenario on
each formulation).
6.4 Coverage
Our final comparison between the three heuristics is to
compare their outcomes in terms of relative dominance,
i.e., how much a non-dominated set A dominates an-
other non-dominated set B. For this, we use the two
set coverage (sc) metric explained at the beginning of
this section.
The results are shown in Tab. 6. One can observe
that the percents of domination by the solutions of h4
over h2 and h3 are much larger than the domination
of h2 and h3 over h4. These experiments reinforce that
the quality of solutions by h4 are, in general, superior
to the ones by h2 and h3.

12
P1 P2
Instance h2 h3 h2 h3
0 = = < =
1 = = = =2 < = < =
3 < < < >
4 = < > <5 < < < <
6 < < < <
(a) Error Rate
P1 P2
Instance h2 h3 h2 h3
0 > < > <
1 > = > <2 > > > >
3 > > > >
4 > > > >5 > > > >
6 > > > >
(b) Pareto Subset
P1 P2
Instance h2 h3 h2 h3
0 < = < =
1 < = < =2 < < < =
3 < < < =
4 = < = <5 < = < <
6 < < < <
(c) Generational Distance
Table 4: Results for Wilcoxon Signed-Rank hypothesis test on convergence metrics.
Table 5: Results for Wilcoxon Signed-Rank hypothesis
test on diversity metric (Maximum Spread).
P1 P2
Instance h2 h3 h2 h3
0 = = < <
1 = = = =2 > > > >
3 < > = >
4 = > = >5 < > = >
6 = > < >
6.5 Comparison with Traditional Algorithms
In this section we proceed to another kind of experi-
ment, in which the best model obtained before (SPEA2+h4)
is compared to two well-known algorithms from Rout-
ing and Steiner’s literature: Dijkstra’s algorithm (also
known as Shortest Path Tree or SPT) [10] and Taka-
hashi & Matsuyama heuristic [32].
For the comparison with SPT, we execute it to min-
imize end-to-end delay, on each instance. The main fea-
ture of SPT algorithm that is relevant in this context is
that it can guarantee the optimal end-to-end delay path
between two arbitrary vertices in a connected graph. In
this manner, GA was set to minimize the objective D
with cost, hops and α, to evidence if:
(i) in how many executions GA returned solutions with
D that attended the optimal delay given by SPT
(i.e. D = dsptmax);
(ii) when attended, which would be the gains obtained
by GA on the other objectives; and
(iii) if we define a tolerance for dsptmax, we verify if would
be any increase of the gains observed in the previous
item.
Also, one can note that in the comparison between
GA and SPT it is not possible to improve the objectiveD, since it corresponds to the average of end-to-end
delays, for which SPT gives the optimal solution, as
discussed.
The following figure of comparison was defined to
determine the gains/losses of GA over the two algo-
rithms:
g =fXi − fGA
i
fGAi
where fXi and fGAi correspond to the values of objective
i obtained by algorithm X (SPT or TM) and GA for
a given solution, respectively. Thus, when g > 0, this
metric give much a solution by X is worse compared
to the one by GA; when g < 0, the solution by GA is
worse than the one from X.
The results of the comparison with SPT indicated
that, regarding (i), GA was able to calculate solutions
that attended dsptmax on all instances. In other words, GA
achieved the same ability of SPT on calculating optimal
end-to-end delays in 100% of runs. Besides that, we also
verified that GA was able to provide other solutions
with better values for another objectives (cost, hops
and α), as investigated by itens (ii) and (iii). These
gains, considering the general means for all instances,
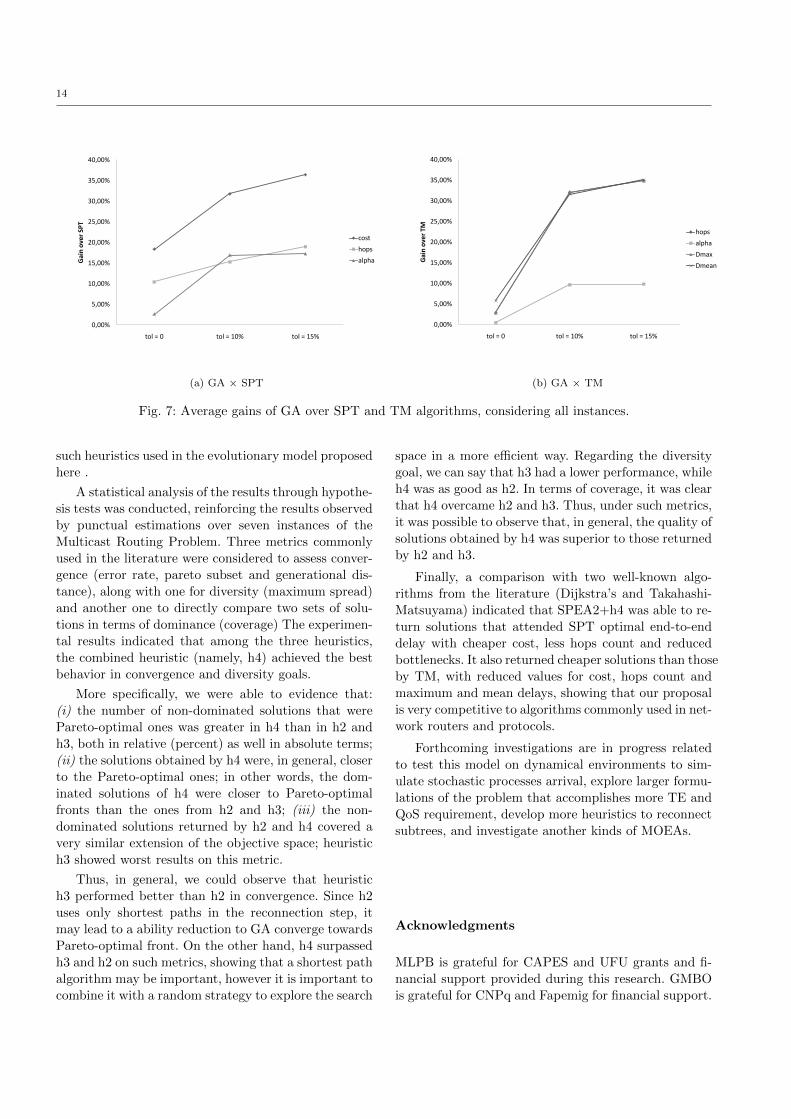
are shown in Fig. 7a (tol = 0 corresponds to attend
the strict dsptmax), along with the gains obtained when
tolerances of 10% and 15% are allowed. This chart in-
dicates that GA was around 19%, 11% and 3% better
than SPT in respect of cost, hops and α, respectively.
Next, we proceed to a comparison with Takahashi
& Matsuyama heuristic [32], which provides a 2opt ap-
proximation ratio when applied to calculate the cost of
a multicast tree. We want to verify the capability of GA
to return solutions that attend or reduce the cost of so-
lutions by TM heuristic, i.e., verify if costGA ≤ costTM ,
and which would be the gains obtained in the other ob-
jectives when such condition is satisfied. The analysis
of tolerance are made as well.
Based on the gathered results, TM achieved opti-
mal cost on the smaller networks (nets 0 and 1), how-
ever, did not reached it on half of the larger nets. On
the other hand, GA was able to achieve solutions with
optimal cost on all instances. In other words, besides

13
Table 6: Results for the Two Set Coverage metric.
P1 P2Instance sc (h4,h2) sc(h2,h4) sc(h4,h3) sc(h3,h4) sc (h4,h2) sc(h2,h4) sc(h4,h3) sc(h3,h4)
0 0.62% 0.00% 0.23% 0.24% 5.78% 0.21% 1.03% 1.42%
1 1.68% 0.00% 0.14% 0.82% 0.74% 0.00% 0.00% 0.00%
2 6.83% 1.35% 3.83% 2.15% 8.24% 2.11% 4.42% 5.44%3 10.95% 0.19% 2.47% 0.61% 10.20% 0.68% 1.34% 1.39%
4 2.70% 2.44% 6.59% 0.77% 3.10% 2.62% 16.17% 0.99%
5 5.78% 0.15% 3.19% 0.06% 10.24% 0.80% 8.74% 1.40%6 18.05% 4.24% 19.60% 2.20% 13.93% 8.57% 20.63% 5.76%
x 6.67% 1.20% 5.15% 0.98% 7.46% 2.14% 7.48% 2.35%
providing solutions that attended TM’s cost, GA was
able to improve it when possible, i.e., when TM did not
found the optimal cost. The general mean of gain of
GA over TM on cost was around 3%. The other gains
are shown in Fig. 7b (tol = 0 corresponds to satisfy
costGA ≤ costTM ).
Additionally, when looking at the Pareto-optimal
sets of the instances in which TM did not found opti-
mal cost, it becomes clear why GA was not capable of
improve other objectives (D, hops, etc.): in fact, there
were no more solutions with optimal cost that had re-
duced values for other objectives. Thus, the mean gains
of GA over TM with no tolerance (i.e. tol = 0) are very
small for α and hops. However, when TM’s cost is made
flexible (tol > 0), more expressive gains are obtained.
In such cases, the gains of GA over TM are even bigger
than those over SPT discussed before.
6.6 Running time
The mean time to build a single multicast route with
the three GA heuristics and the two traditional algo-
rithms (SPT and TM) is shown in Tab. 7, using an In-
tel Quad Core 2.0GHz machine with 6.0GB RAM. As
expected, the first three columns show that GA is more
time consuming than SPT and TM algorithms, since it
uses the SPT algorithm inside each crossover and mu-
tation operators (specifically, in heuristics h2 and h4).
Despite the better running time of SPT and TM, we
showed in Sec. 6.5 that GA provided extra gains over
SPT and TM, in terms of values of objective functions.
Besides, we can point that while SPT and TM return
only a single solution (one multicast route), GA mod-
els discussed here return a set of multicast routes, a
skill that can be explored by a dynamic protocol able
to deal with re-routing and other traffic engineering re-
quirements.
Observing the average results between the heuris-
tics, the following order was obtained: h3 < h4 < h2.
Heuristic h3 was around 16% and 9% faster than h2 and
h4, respectively, while h4 was around 8% faster than h2.
In terms of scalability, a variety of instances were
chosen to observe how the proposed method would be-
havior on different scenarios. Each instance have differ-
ent cardinalities of V , E, D and Pareto set P ∗. More
specifically, to estimate dependance of running time in
terms of the dimensions of G, we calculated the Pear-
son’s linear correlation coefficient (r) in two scenar-
ios: the correlation between running time and |V |, and
|E|. The correlation between running time and |V | was
r = +0.883, while the correlation between running time
and |E| was r = +0.823, indicating a good correlation
between such variables. Furthermore, these numbers in-
dicate that running time grown in an approximate lin-
ear fashion on the selected instances, i.e., running time
depend on |V | and |E| approximately linear.
Table 7: Mean time to build a multicast route (in sec-
onds) on P1 formulation.
Instance h2 h3 h4 SPT TM
0 9.0E-03 7.0E-03 8.0E-03 4.8E-05 5.0E-05
1 9.0E-03 6.0E-03 8.0E-03 5.3E-05 5.1E-05
2 4.9E-02 4.1E-02 4.6E-02 1.6E-04 1.8E-043 1.3E-01 1.1E-01 1.2E-01 2.1E-04 2.3E-04
4 1.0E-01 7.7E-02 9.1E-02 4.2E-04 5.2E-045 1.1E-01 9.6E-02 1.0E-01 8.0E-04 1.2E-03
6 1.3E-01 1.1E-01 1.2E-01 5.7E-04 6.0E-04
x 7.7E-02 6.5E-02 7.1E-02 3.2E-04 4.1E-04
7 Final Remarks and Future Research
This paper tackled two four-objective formulations of
Multicast Flow Routing Problem, in which a multicast
tree must be set to carry a new flow into a network. We
adopted one model of the class of Multiobjective Evo-
lutionary Algorithms (MOEAs), namely SPEA2, along
with we investigated three heuristics to reconnect sub-
trees, a step of crossover and mutation genetic opera-
tors. We continued the studies of previous papers [7],
[8], [6], bringing new experiments and evaluations of
14
0,00%
5,00%
10,00%
15,00%
20,00%
25,00%
30,00%
35,00%
40,00%
tol = 0 tol = 10% tol = 15%
Gai
n o
ver
SPT
cost
hops
alpha
(a) GA × SPT
0,00%
5,00%
10,00%
15,00%
20,00%
25,00%
30,00%
35,00%
40,00%
tol = 0 tol = 10% tol = 15%
Gai
n o
ver
TM hops
alpha
Dmax
Dmean
(b) GA × TM
Fig. 7: Average gains of GA over SPT and TM algorithms, considering all instances.
such heuristics used in the evolutionary model proposed
here .
A statistical analysis of the results through hypothe-
sis tests was conducted, reinforcing the results observed
by punctual estimations over seven instances of the
Multicast Routing Problem. Three metrics commonly
used in the literature were considered to assess conver-
gence (error rate, pareto subset and generational dis-
tance), along with one for diversity (maximum spread)
and another one to directly compare two sets of solu-
tions in terms of dominance (coverage) The experimen-
tal results indicated that among the three heuristics,
the combined heuristic (namely, h4) achieved the best
behavior in convergence and diversity goals.
More specifically, we were able to evidence that:
(i) the number of non-dominated solutions that were
Pareto-optimal ones was greater in h4 than in h2 and
h3, both in relative (percent) as well in absolute terms;
(ii) the solutions obtained by h4 were, in general, closer
to the Pareto-optimal ones; in other words, the dom-
inated solutions of h4 were closer to Pareto-optimal
fronts than the ones from h2 and h3; (iii) the non-
dominated solutions returned by h2 and h4 covered a
very similar extension of the objective space; heuristic
h3 showed worst results on this metric.
Thus, in general, we could observe that heuristic
h3 performed better than h2 in convergence. Since h2
uses only shortest paths in the reconnection step, it
may lead to a ability reduction to GA converge towards
Pareto-optimal front. On the other hand, h4 surpassed
h3 and h2 on such metrics, showing that a shortest path
algorithm may be important, however it is important to
combine it with a random strategy to explore the search
space in a more efficient way. Regarding the diversity
goal, we can say that h3 had a lower performance, while
h4 was as good as h2. In terms of coverage, it was clear
that h4 overcame h2 and h3. Thus, under such metrics,
it was possible to observe that, in general, the quality of
solutions obtained by h4 was superior to those returned
by h2 and h3.
Finally, a comparison with two well-known algo-
rithms from the literature (Dijkstra’s and Takahashi-
Matsuyama) indicated that SPEA2+h4 was able to re-
turn solutions that attended SPT optimal end-to-end
delay with cheaper cost, less hops count and reduced
bottlenecks. It also returned cheaper solutions than those
by TM, with reduced values for cost, hops count and
maximum and mean delays, showing that our proposal
is very competitive to algorithms commonly used in net-
work routers and protocols.
Forthcoming investigations are in progress related
to test this model on dynamical environments to sim-
ulate stochastic processes arrival, explore larger formu-
lations of the problem that accomplishes more TE and
QoS requirement, develop more heuristics to reconnect
subtrees, and investigate another kinds of MOEAs.
Acknowledgments
MLPB is grateful for CAPES and UFU grants and fi-
nancial support provided during this research. GMBO
is grateful for CNPq and Fapemig for financial support.

15
References
1. Aneja, Y. P. An integer programming approach to thesteiner problem in graphs. Networks, 10 (1980), 167–178.
2. Aragao, M. P., Ribeiro, C. C., Uchoa, E., and Werneck,
R. F. Hybrid local search for the steiner problem in graphs.In in Extended Abstracts of the 4th Metaheuristics Interna-
tional Conference (2001), pp. 429–433.
3. Awduche, D., Chiu, A., Elwalid, A., Widjaja, I., andXiao, X. Overview and Principles of Internet Traffic Engi-
neering, 2002.
4. Beasley, J. OR-Library: Distributing test problems by elec-
tronic mail. Journal of the Op. Research Society 41 (1990),1069–1072.
5. Bueno, M. L. P., and Oliveira, G. M. B. Algorithms to
augment diversity and convergence in multiobjective multi-cast flow routing. In 11th IEEE Brazilian Symposium on
Neural Networks (SBRN ’10) (Sao Bernardo do Campo,
Brasil, 2010), pp. 158–163.
6. Bueno, M. L. P., and Oliveira, G. M. B. Multicast flow
routing: Evaluation of heuristics and multiobjective evolu-
tionary algorithms. In IEEE Congress on Evolutionary Com-putation (CEC’10) (Barcelona, Spain, 2010), pp. 1–8.
7. Bueno, M. L. P., and Oliveira, G. M. B. Multiobjec-
tive evolutionary algorithms and a combined heuristic forroute reconnection applied to multicast flow routing. In 10th
IEEE International Conference on Computer and Informa-
tion Technology (CIT ’10) (Bradford, UK, 2010), pp. 464–471.
8. Bueno, M. L. P., and Oliveira, G. M. B. Pareto-based op-
timization of multicast flows with qos and traffic engineering
requirements. In 9th IEEE International Symposium on Net-work Computing and Applications (NCA’10) (Cambridge,
USA, 2010), pp. 257–260.
9. Chuang, J. C.-I., and Sirbu, M. A. Pricing multicast com-munication: A cost-based approach. Telecommunication Sys-
tems 17, 3 (2001), 281–297.
10. Cormen, T. H., Leiserson, C. E., Rivest, R. L., andStein, C. Introduction to Algorithms, 2nd ed. The MIT
Press, 2001.
11. Crichigno, J., and Baran, B. Multiobjective multicast
routing algorithm for traffic engineering. In ICCCN (2004),R. P. Luijten, L. A. DaSilva, and A. P. J. Engbersen, Eds.,
IEEE, pp. 301–306.
12. Cui, X., Lin, C., and Wei, Y. A multiobjective model forqos multicast routing based on genetic algorithm. In ICC-
NMC ’03: Proceedings of the 2003 International Conference
on Computer Networks and Mobile Computing (Washington,USA, 2003), IEEE Computer Society, p. 49.
13. Dalal, Y. K., and Metcalfe, R. M. Reverse path for-
warding of broadcast packets. Commun. ACM 21, 12 (1978),1040–1048.
14. Dreyfus, S. E., and Wagner, R. A. The steiner problem
in graphs. Networks, 1 (1971), 195–207.
15. Fabregat, R., Donoso, Y., Baran, B., Solano, F., andMarzo, J. L. Multi-objective optimization scheme for mul-
ticast flows: a survey, a model and a MOEA solution. In
LANC ’05: Proc. of the 3rd IFIP Latin American conf. onNetworking (New York, USA, 2005), ACM, pp. 73–86.
16. Ghaboosi, N., and Haghighat, A. Tabu search based algo-
rithms for bandwidth-delay-constrained least-cost multicastrouting. Telecommunication Systems 34 (2007), 147–166.
10.1007/s11235-007-9031-7.
17. Goldberg, D. E. Genetic Algorithms in Search, Optimiza-
tion & Machine Learning. Addison-Wesley, Massachusetts,1989.
18. Karp, R. M. Reducibility among combinatorial problems.In Complexity of Computer Computations, R. E. Miller and
J. W. Thatcher, Eds. 1972, pp. 85–103.
19. Kompella, V. P., Pasquale, J. C., and Polyzos,
G. C. Multicast routing for multimedia communication.
IEEE/ACM Trans. Netw. 1, 3 (1993), 286–292.
20. Montgomery, D. C., and Runger, G. C. Applied Statistics
and Probability for Engineers, 3rd ed. John Wiley & Sons,2003.
21. Moy, J. OSPF Version 2. RFC 2328 (Standard), Apr. 1998.Updated by RFC 5709.
22. Oliveira, G. M. B., and Araujo, P. T. Determining mul-ticast routes with qos and traffic engineering requirements
based on genetic algorithm. In Proc. of the 2004 IEEE Con-
ference on Cybernetics and Intelligent Systems (Singapore,Dec 2004), vol. 1, pp. 665 – 669.
23. Oliveira, G. M. B., and Vita, S. S. B. V. A Multi-Objective Evolutionary Algorithm with ε-dominance to Cal-
culate Multicast Routes with QoS Requirements. In 2009
IEEE Congress on Evolutionary Computation (CEC’2009)(Norway, May 2009), pp. 1–9.
24. Prathombutr, P., Stach, J. F., and Park, E. K. An al-gorithm for traffic grooming in wdm optical mesh networks
with multiple objectives. Telecommunication Systems 28, 3-4(2005), 369–386.
25. Prieto, J., Baran, B., and Crichigno, J. Multitree-multiobjective multicast routing for traffic engineering. In
IFIP AI (2006), M. Bramer, Ed., vol. 217 of IFIP, Springer,
pp. 247–256.
26. Ravi, R. Steiner trees and beyond: approximation algo-
rithms for network design. PhD thesis, Departament of Com-puter Science – Brown University, Providence, Rhode Island,
September 1993.
27. Ravikumar, C. P., and Bajpai, R. Source-based delay-
bounded multicasting in multimedia networks. Computer
Communications 21, 2 (1998), 126–132.
28. Rouskas, G. N., and Baldine, I. Multicast routing with
end-to-end delay and delay variation constraints. In SelectedAreas in Communications, IEEE Journal on Communica-
tions (USA, April 1997), vol. 15 of 3, IEEE, pp. 346–356.
29. Rudolph, G. Evolutionary search under partially ordered
fitness sets. In In Proceedings of the International Sympo-
sium on Information Science Innovations in Engineering ofNatural and Artificial Intelligent Systems (ISI 2001 (1999),
ICSC Academic Press, pp. 818–822.
30. Siegel, E. D. Designing Quality of Service Solutions for the
Enterprise. John Wiley & Sons, Inc., New York, NY, USA,
1999.
31. Skorin-Kapov, N., and Kos, M. A grasp heuristic for the
delay-constrained multicast routing problem. Telecommuni-cation Systems 32, 1 (2006), 55–69.
32. Takahashi, H., and Matsuyama. An approximate solutionfor the steiner problem in graphs. Mathematical Japonica,
24 (1980), 573–577.
33. Tanenbaum, A. S. Computer Networks, 4th ed. PrenticeHall, 2002.
34. Van Veldhuizen, D. A. Multiobjective Evolutionary Al-
gorithms: Classifications, Analyses, and New Innovations.
PhD thesis, Wright-Patterson AFB, OH, 1999.
35. Vita, S. S. B. V. Multiobjective genetic algorithms appliedto multicast routing with quality of service. Master’s the-sis, Universidade Federal de Uberlandia - Programa de Pos-Graduacao em Ciencia da Computacao, 2009.
36. Wang, H., Meng, X., Li, S., and Xu, H. A tree-based
particle swarm optimization for multicast routing. ComputerNetworks 54, 15 (October 2010), 2775–2786.

16
37. Wang, Z., and Crowcroft, J. Quality of service routingfor supporting multimedia applications. IEEE Journal on
Selected Areas in Communications 14 (1996), 1228–1234.
38. Xu, Y., and Qu, R. Solving multi-objective multicast rout-ing problems by evolutionary multi-objective simulated an-
nealing algorithms with variable neighbourhoods. Journalof the Operational Research Society 62, 2 (February 2011),
313–325.
39. Zhengying, W., Bingxin, S., and Erdun, Z. Bandwidth-delay-constrained least-cost multicast routing based on
heuristic ga. Computer Communications 24, 7-8 (2001), 685–
692.40. Zitzler, E., Deb, K., and Thiele, L. Comparison of mul-
tiobjective evolutionary algorithms: Empirical results. Evo-
lutionary Computation 8 (2000), 173–195.41. Zitzler, E., Laumanns, M., and Bleuler, S. A Tutorial on
Evolutionary Multiobjective Optimization. In Metaheuris-
tics for Multiobjective Optimisation (2004), X. Gandibleuxet al., Eds., Lecture Notes in Economics and Mathematical
Systems, Springer.42. Zitzler, E., Laumanns, M., and Thiele, L. SPEA2: Im-
proving the Strength Pareto Evolutionary Algorithm for
Multiobjective Optimization. In EUROGEN 2001.43. Zitzler, E., and Thiele, L. Multiobjective evolutionary al-
gorithms: A comparative case study and the strength pareto
approach. IEEE Transactions on Evolutionary Computa-tion, 3 (1999), 257–271.












![MikroTik Multicast Routing []](https://img.dokumen.tips/doc/110x75/55a6073e1a28abf4248b4775/mikrotik-multicast-routing-wwwimxpertco.jpg)
















