Embed Size (px)
Citation preview

Universidad de La Salle Universidad de La Salle
Ciencia Unisalle Ciencia Unisalle
Ingeniería Civil Facultad de Ingeniería
12-15-2010
Fotogrametría terrestre aplicada a modelos físicos del laboratorio Fotogrametría terrestre aplicada a modelos físicos del laboratorio
de procesos geotécnicos de procesos geotécnicos
Marinela Pinzón Muñóz Universidad de La Salle, Bogotá
Follow this and additional works at: https://ciencia.lasalle.edu.co/ing_civil
Part of the Civil Engineering Commons
Citación recomendada Citación recomendada Pinzón Muñóz, M. (2010). Fotogrametría terrestre aplicada a modelos físicos del laboratorio de procesos geotécnicos. Retrieved from https://ciencia.lasalle.edu.co/ing_civil/256
This Trabajo de grado - Pregrado is brought to you for free and open access by the Facultad de Ingeniería at Ciencia Unisalle. It has been accepted for inclusion in Ingeniería Civil by an authorized administrator of Ciencia Unisalle. For more information, please contact [email protected].

FOTOGRAMETRÍA TERRESTRE APLICADA A MODELOS FÍSICOS DEL
LABORATORIO DE PROCESOS GEOTÉCNICOS
MARINELA PINZÓN MUÑÓZ
UNIVERSIDAD DE LA SALLE FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA CIVIL BOGOTÁ D.C.
2010

FOTOGRAMETRÍA TERRESTRE APLICADA A MODELOS FÍSICOS DEL
LABORATORIO DE PROCESOS GEOTÉCNICOS
MARINELA PINZÓN MUÑÓZ
Trabajo de grado presentado como requisito final para optar al título de Ingeniero Civil
Director Temático Ing. Carlos Mendoza
Asesora metodológica Mag. Marlén Cubillos
UNIVERSIDAD DE LA SALLE FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA CIVIL BOGOTÁ D.C.
2010

Nota de aceptación: ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
________________________________
Firma del presidente de jurado
__ _ _____________ __ _______ _______
Firma del jurado
__ _ ________________
do
__ _______ ____
Firma del jura
Bogotá D.C., 15 de Diciembre de 2010

DEDICATORIA
Este título se lo dedico a mis papás José Pinzón y Carmen Muñoz y mis hermanos
Leidy Pinzón y Edison Pinzón que con su esfuerzo, dedicación y apoyo durante
este proceso importante de mi vida hicieron que este sueño se me hiciera realidad.
A Dios por permitirme la vida para vivir una experiencia tan bonita como lo es de
ser una profesional, y poder alcanzar una tercera meta de mi vida y por darme la
oportunidad de seguir creciendo moralmente y como persona, además por
escucharme y ayudarme a salir de los tropiezos que se me presentaron en esta
etapa.
A todos aquellos (PROFESORES) que con sus enseñanzas me dieron la
oportunidad compartir con ellos sus conocimientos.
A mis amigos y amigas que con ellos luchamos para sacar adelante esta meta que
es tan importante para nuestras vidas.
A toda mi familia que ellos hicieron parte también de este proceso, a mis abuelos y
mis tíos que están allá en el cielo orgullosos de que en la familia sigamos
creciendo todos como profesionales y que podamos seguir adelante para así
darles un gran ejemplo a nuestros hijos en un futuro.

AGRADECIMIENTOS
La autora expresa su reconocimiento:
Al ingeniero CARLOS LEONARDO MENDOZA, director temático, que me brindó
la oportunidad de hacer parte de su proyecto, por su larga espera y paciencia; por
la motivación, empeño, apoyo y compromiso para la culminación de este
proyecto, gracias por permitirme ser partícipe de sus conocimientos.
Al ingeniero ADOLFO CAMILO TORRES PRADA, por darme la oportunidad de
realizar mi proyecto en su laboratorio, junto con otros proyectos trabajados
alternamente al mío, por su paciencia y apoyo.
A MARLÉN CUBILLOS, asesora metodológica, agradezco dedicación para el
desarrollo de este trabajo, y por brindarnos sus conocimientos para el bienestar de
nosotros.
Al ingeniero FERNANDO ALBERTO NIETO, gracias por su apoyo y su interés
para que se efectuara a cabalidad el presente trabajo.
Al ingeniero MAURICIO AYALA, asistente dirección programa de ingeniería civil
por su apoyo y colaboración incondicional para que pudiera culminar con esta
etapa de mi vida.
A DIEGO GONZÁLEZ, JORGE LOMBANA BERCID, Y OSCAR JAVIER PARRA CRUZ compañeros y estudiantes investigadores, por apoyo permanente en el
desarrollo de este proyecto, por brindarme esa confianza para también apoyar en
sus trabajos de grado.

A OSCAR MAURICIO VARGAS LÓPEZ compañero que me brindó apoyo,
confianza de principio a fin para la culminación de mi trabajo de grado, por su
colaboración incondicional y su disposición.
A JOSE PINZÓN, mi papá, gracias a su apoyo, enseñanzas y la oportunidad de
poder aprender lo que era mi carrera, gracias por su gran esfuerzo para apoyarme
económicamente y por el amor que me ha brindado durante esta etapa de mi
vida.
A todas las personas que hicieron posible éste logro: mi familia, ingenieros,
profesores, compañeros, amigos; que a lo largo de todo este proceso,
representaron un apoyo incondicional para cumplir nuestras metas.

TABLA DE CONTENIDO
PAG.
INTRODUCCIÓN 14
1 JUSTIFICACIÓN 15
2 OBJETIVOS 16
2.1 Objetivo general 16
2.2 Objetivos específicos 16
3 PROBLEMA 17
3.1 LÍNEA 17
3.2 TÍTULO 17
3.3 DESCRIPCIÓN DEL PROBLEMA 17
3.4 FORMULACIÓN DEL PROBLEMA 18
4 MARCO TEÓRICO 19
4.1 MARCO TEÓRICO CONCEPTUAL 19
4.1.1 Estado del arte (antecedentes) 19
4.1.2 Aerotriangulación analítica 23
4.1.3 Rectificación convencional 26
4.1.4 Transformación proyectiva 28
4.1.5 estereofotogrametría digital 29

4.2 EXPERIENCIAS EN EL USO DE LA FOTOGRAMETRÍA TERRESTRE 30
5 METODOLOGÍA 33
5.1 INTRODUCCIÓN USO DE CÁMARAS DIGITALES NO
MÉTRICA 34
5.2 METODOS Y ALTERNATIVAS PARA LA CALIBRACIÓN DE
CÁMARAS 35
5.3 ALTERNATIVAS PARA CONOCER LA PRECISIÓN EN FOTOGRAFÍAS
CON CÁMARAS NO MÉTRICAS 36
5.3.1 Consideraciones geométricas en la medición de puntos en las
fotografías 36
5.4 TABLERO DE PRUEBAS 36
5.4.1 Rectificación convencional de la fotografía del tablero 37
5.5 USO DE LA IMAGEN ESTEREOSCÓPICA 41
5.6 RECTIFICACION CONVENCIONAL USO DE IMÁGENES
INDIVIDUALES 45
5.6.1 Determinación de los desplazamientos 52
5.7 MODELAMIENTO ESTEREOSCOPICO ESTEREOFOTOGRAMETRIA 56
5.7.1 Establecimientos del proyecto inicial 61
5.7.2 Proceso de aerotriangulación 68
5.7.3 Generación de modelos digitales de superficie 74
5.7.4 Establecimientos del proyecto final 76

5.7.5 Proceso de comparación entre el DTM inicial y el DTM final 80
CONCLUSIONES 82
RECOMENDACIONES 84
BIBLIOGRAFÍA 86
ANEXOS

LISTA DE TABLAS
Pág.
Tabla 1. Coordenadas puntos de control tablero de pruebas 38
Tabla 2. Datos tablero de prueba foto dsc 07537 (puntos exactos -
puntos leídos) 90
Tabla 3. Datos tablero de prueba foto dsc 07537 (puntos exactos -
puntos control) 93
Tabla 4.Coordenadas puntos de control frente del modelo 47
Tabla 5. Desplazamientos parciales de los puntos de instrumentación
estado inicial foto 10103 y estado intermedio foto 10371 95
Tabla 6. Desplazamientos finales de los puntos de instrumentación y
puntos foto 10499 100

LISTA DE FIGURAS
Pág.
Figura 1. Grafico tomado articulo Karl Ludwig 30
Figura 2. Puntos de control tablero de pruebas 37
Figura 3. Puntos tomados para comprobar precisión 39
Figura 4. Testigos iníciales del tablero de pruebas (ptos verdes) 40
Figura 5. Estructura en el editor de proyectos Summit evolution 42
Figura 6. Residuales de la orientación relativa 43
Figura 7. Resultados de la orientación absoluta 44
Figura 8. Par estereoscópico del tablero de pruebas 45
Figura 9. Testigos CAD del modelo 46
Figura 10. Imagen rectificada 10103 48
Figura 11.Imagen rectificada 10103 puntos de instrumentación –
puntos de control 49
Figura 12. Imagen rectificada 10103 puntos de instrumentación –
puntos de control, desplazamientos de puntos 50
Figura 13. Puntos de control 10371, puntos de desplazamiento 51
Figura 14. Puntos de desplazamientos final 10499 52
Figura 15. Imagen rectificada 10371desplazamientos en el modelo 53
Figura 16. Desplazamientos finales e intermedios en el modelo 54
Figura 17. Desplazamientos totales presentados en el modelo 55
Figura 18. Montaje de la cámara superior 58

Figura 19. Distribución de cuerdas 59
Figura 20. Distancia para la toma de fotografías en el riel 60
Figura 21. Establecimientos del proyecto inicial 62
Figura 22. Creación de la cámara digital en el Software Inpho 63
Figura 23. Coordenadas de los centros de proyección de cada una
de las fotografías 64
Figura 24. Lista de los puntos de fotocontrol para el proceso de
aerotriangulación 65
Figura 25. Grafico de ubicación de puntos de control parte superior
del modelo 66
Figura 26. Información de la faja inicial 67
Figura 27. Centros de proyección de la faja inicial 68
Figura 28. Medición de puntos de control 69
Figura 29. Parámetros y valores estratégicos para la correlación
de imágenes 70
Figura 30. Coeficientes de correlación 71
Figura 31. Resultados de ajustes de la fotografías 72
Figura 32. Calculo de errores de los puntos de fotocontrol 73
Figura 33. Puntos de aerotriangulación 74
Figura 34. Centros de proyección de la faja final 77
Figura 35. Orientación relativa faja final 78
Figura 36. Orientación absoluta faja final 79
Figura 37. Grilla de puntos muestreados 80
LISTA DE ANEXOS
Anexo A. Tablero de pruebas coordenadas
Anexo B. Testigos instalados en el frente del modelo
Anexo C. Mosaico faja inicial
Anexo D. Mosaico faja final
Anexo E. Distribución de los puntos de control parte superior del modelo
Anexo F. Tabla de resultados aerotriangulación inicial
Anexo G. Tabla de resultados aat faja inicial
Anexo H. Tabla de resultados aerotriangulación final
Anexo I. Tabla de resultados aat faja final
Anexo J. Planos malla de puntos modelo digital proyecto final e inicial
INTRODUCCIÓN
La Fotogrametría terrestre se muestra como una técnica muy útil para realizar
levantamientos de obras o construcciones como edificios o estructuras
arquitectónicas de interés. Así, esta técnica contribuye al conocimiento y facilita la
toma de decisiones en las actuaciones sobre obras civiles o patrimonio
arquitectónico, que requieran levantamientos que permitan realizar mediciones a
partir de registros fotográficos y el uso de la fotogrametría.
Básicamente el uso de la fotografía terrestre (Schenk, T., 2002), radica en la
obtención de esquemas cartográficos en 3D a escala por medio de procesos de
imágenes fotográficas permitiendo capturar una serie de datos que son
procesados y analizados por medio de una variedad de software especializado en
el análisis computarizado de elementos fotográficos.
Este proyecto de investigación se realizó en el laboratorio de Modelación de
Procesos Geotécnicos (GeoLab) de la Universidad de la Salle, donde se llevó a
cabo el estudio de un modelo físico (Torres, A, C., 2009), para el análisis de la
perforación de un túnel, para hacer respectivos estudios e investigaciones del
comportamiento geotécnico que involucra el seguimiento de movimientos o
desplazamientos con el propósito de analizar la subsidencia y desplazamientos
presentes durante las labores de perforación del túnel.
1

1 JUSTIFICACIÓN
El proyecto se elaboró con el fin de demostrar que la fotogrametría terrestre puede
contribuir a los procesos de la modelación física en el GeoLab, realizando un
registro, monitoreo y control de los diferentes desplazamientos del modelo, esto
utilizando cámaras no métricas, generando así un modelo estereoscópico para
luego ser medido.
Esta investigación complementa otro monitoreo que se realizó en el modelo con
los sensores LVDT que se instalaron en el modelo físico, ya que lo que se
pretendía era verificar que las mediciones de los desplazamientos fueran iguales o
similares, por medio de un método indirecto como lo fue la fotogrametría digital
con cámaras no métricas.
2

2 OBJETIVOS
2.1 Objetivo general
Determinar los desplazamientos que se presenten en el modelo físico
realizando mediciones en fotografías rectificadas y en los modelos
estereoscópicos construidos a partir de registros fotográficos de imágenes
tomadas al modelo geotécnico con cámaras no métricas.
3.2 Objetivos específicos
• Establecer el estado del arte.
• Lograr por medio de las fotografías mediciones en las diferentes etapas del
ensayo en el laboratorio de GeoLab
• Analizar por medio de imágenes digitales los desplazamientos encontrados en
los modelos montados en el laboratorio.
• Generar una aproximación a la metodología para la aplicación de fotogrametría
de rango cercano, en el seguimiento de desplazamientos en los modelos
físicos que se construyan en el GeoLab.
3
3 EL PROBLEMA
3.1 LÍNEA
El proyecto de investigación que se desarrolló fue incorporado a la línea del
grupo CIROC, excavaciones y estructuras de sostenimiento, teniendo en
cuenta que su aplicación pertenece al área de Geotecnia, donde se realizó la
medición de desplazamientos en modelos geotécnicos. Aunque el proyecto es
del área de geomática, este se incorporó al área de geotecnia dado su campo
de aplicación.
3.2 TÍTULO
Fotogrametría terrestre aplicada a modelos físicos del laboratorio de procesos
geotécnicos.
3.3 DESCRIPCIÓN DEL PROBLEMA
Para el proyecto fue necesario hacer mediciones de forma indirecta al modelo,
para ello se tuvo en cuenta la posibilidad de hacerlas por medio de la
fotogrametría, ya que no en todas las zonas del modelo se podían usar sensores.
4

Esta fotogrametría se llevó a cabo por medio del proceso fotográfico del modelo
en el transcurso del proyecto y el procesamiento de estas imágenes fotográficas
digitales.
Este proceso fue parte importante para el desarrollo del proyecto ya que lo que se
pretendía era comprobar que los resultados obtenidos fueran similares a los
obtenidos por los sensores, y poder ver la aplicación de la fotografía en la
medición de desplazamientos en determinadas áreas del modelo de manera
indirecta.
El método desarrollado se estructura en dos fases claramente diferenciadas.
• En la primera denominada fase de los trabajos de campo se realizará la
captura de la información que permitirá llevar a cabo los análisis
posteriores.
• En la segunda fase se analizan los datos capturados y se realizan las
mediciones necesarias.
3.4 FORMULACIÓN DEL PROBLEMA
¿La fotogrametría terrestre conocida como CLOSE RANGE es un instrumento
válido para la medición en los modelos del laboratorio de procesos geotécnicos del
grupo CIROC, que permite llevar a cabo las mediciones de desplazamientos que
se presentan, así como la restitución de superficies de los modelos durante los
ensayos?
5

4 MARCO TEÓRICO
4.1 MARCO TEÓRICO CONCEPTUAL
4.1.1 Estado del arte (antecedentes)
Definición de la fotogrametría.
1Fotogrametría es la ciencia de realizar mediciones e interpretaciones
confiables por medio de las fotografías, para de esa manera obtener
características métricas y geométricas (dimensión, forma y posición), del
objeto fotografiado.
Esta definición es en esencia, la adoptada por la Sociedad Internacional de
Fotogrametría y Sensores Remotos (ISPRS).
Por otra parte, la sociedad americana de fotogrametría y sensores remotos
(ASPRS), tiene la siguiente definición, ligeramente más completa que la anterior:
Fotogrametría es el arte, la ciencia y la tecnología de obtener información
confiable de objetos físicos y su entorno, mediante el proceso de exponer,
medir e interpretar tanto imágenes fotográficas como otras, obtenidas de
diversos patrones de energía electromagnética y otros fenómenos.
Con alguna ligereza, suele señalarse sólo las transiciones de Fotogrametría
Analógica a Analítica y de ésta a Digital, sin considerar que antes de la etapa
analógica se hacía una Fotogrametría que comenzó con los procedimientos
1 JÁUREGUI, Manuel. CHACON, Luís, VILCHEZ, José. Rectificación proyectiva plana de imágenes fotográficas digitales, Julio de 2007.
6

gráficos de Laussedat y Meydenbauer y que pasó a ser esencialmente analítica
con el estereocomparador de Pulfrich.
Mucho antes de la aviación, y aún antes de intentar tomas aéreas desde globos o
dirigibles, se hicieron ensayos con fotografías desde la parte más alta de laderas
escarpadas. En 1897, el austríaco T. Scheimpflug comenzó sus importantes
trabajos sobre rectificación, técnica que con el correr del tiempo adquiría gran
difusión.
Scheimpflug no se conformó sólo con la rectificación, que era un procedimiento
que no reconstruía el relieve y, en 1898, sentó las bases de la idea de la
proyección doble.
En la Fotogrametría Aérea no se conocen las posiciones y orientaciones de la
cámara de toma; tampoco los fotogramas están en planos verticales, ni sus ejes
son paralelos. Por lo tanto los aparatos no pueden ser tan sencillos como el
estereoautógrafo, donde las regletas trabajan siempre en un plano.
En 1915 Gasser, con las ideas de Scheimpflug, construyó su Proyector Doble, que
puede considerarse como el primer aparato restituidor apto para fotografías
aéreas con buen funcionamiento En 1920 Nistri construyó su Fotocartógrafo,
también con el sistema anaglífico.
Los procedimientos de orientación fueron estudiados por S. Finsterwalder en
1899, quien propuso resolver el problema en tres pasos: orientación interior,
7

orientación relativa y orientación absoluta. Gasser también desarrolló
procedimientos prácticos de orientación.
Otto von Gruber en 1924 fue el que resolvió el problema de las orientaciones de la
manera más sistemática y completa. Con esto se lograba evitar el manejo de las
extensas fórmulas de la Fotogrametría Analítica, algo que quedó perfectamente
expresado en su conocido lema: Fotogrametría es el arte de evitar todo
cálculo.
En la Fotogrametría Terrestre, la llegada del estereoautógrafo de von Orel, el
primer restituidor analógico significativo, fue considerada como un gran
acontecimiento porque eliminaba la necesidad de calcular y dibujar punto por
punto, y permitía el trazado continuo de los rasgos cartográficos. La euforia del
momento, que hizo que tal trazado fuera calificado exageradamente como
“automático”, tenía su justificación: la producción cartográfica podía incrementarse
drásticamente convirtiéndose en una suerte de proceso industrial. Casi
inmediatamente, y bajo el lema de von Gruber “Fotogrametría es el arte de evitar
todo cálculo”, surgieron los restituidores analógicos adecuados para la
Fotogrametría Aérea que marcaron toda una época y consolidaron a la
Fotogrametría como una herramienta de alta eficiencia.
Desde 1936, Wild, de Suiza produjo solamente instrumentos de proyección
mecánica. Varios años después, en 1960, Zeiss Oberkochen también cambió a la
8
proyección mecánica con instrumentos como el Planimap y el Planicart que
lograron una buena aceptación en el mercado.
Gasser y von Gruber también propusieron y diseñaron procedimientos para la
concatenación de modelos dando nacimiento a la aerotriangulación.
La transición de la Fotogrametría Analógica a la Analítica fue particularmente
lenta.
La transición de la Fotogrametría Analógica a la Analítica, como consecuencia
ineludible del advenimiento de la Computación, abarcó una larga etapa de
coexistencia entre ambas modalidades y, si bien logró significativos avances en la
precisión, y en campos como el de la Compensación en Bloque de la
Triangulación Aérea, no repercutió de manera importante en la confección de los
mapas de línea. Con el restituidor analítico, el operador trabajaba casi de la misma
manera que con su antecesor analógico.
Los grandes beneficios de la Fotogrametría Analítica no estuvieron en el restituidor
analítico, el cual desde un punto de vista ergonómico no resultaba muy distinto de
sus antecesores analógicos, sino en el formidable cambio en las técnicas de
Aerotriangulación.
La última transición se desarrolla en nuestros días y nos conduce de los
procedimientos analíticos a los digitales. Importa un cambio profundo en las
modalidades tradicionales de la Fotogrametría y a veces no resulta fácil intuir el
rumbo de la disciplina en el futuro. Lo logrado hasta el presente es asombroso.
9

Los procesos de fotogrametría digital contemplan diferentes aplicaciones o etapas
las cuales incluyen la aerotriangulación, la captura de datos, la obtención de
DTM´S y la elaboración de ortofotos.
Además a estos anteriores estudios se puede referenciar publicaciones por parte
del grupo de investigación de la Universidad de La Salle CIROC.
• estudio del fenómeno de subsidencia en suelos blandos de Bogotá,
ocurridos por la construcción de un túnel con maquina E.P.B. 2
• Evaluación de parámetros elásticos de mezclas artificiales de suelos para
modelos del laboratorio GeoLab; donde se propone el uso de la fotografía
tipo Close Range o Fotogrametría Digital como método de medición de
desplazamientos y determinación de deformaciones en muestras de suelo
ensayadas en la cámara triaxial. 3
4.1.2 Aerotriangulación Analítica
4La triangulación es el proceso de determinar indirectamente los parámetros de
orientación de un bloque de imágenes fotográficas, así como las coordenadas del
terreno u objeto de ciertos puntos espaciales.
2 TORRES PRADA, Camilo Adolfo, NIETO CASTAÑEDA, Fernando Alberto; safe tunnelling for the city and for the environment: proceedings ita-aites world tunnel congress 2009, budapest, hungary, may 23-28, 2009. 3 MARÍN RIVEROS, Natalia Eugenia ; evaluación de parámetros elásticos de mezclas artificiales de suelos para modelos del laboratorio Geolab, 2008, universidad de la salle, facultad de ingeniería civil, Bogotá. 4 FOTOGRAMETRIA MODERNA: ANALITICA Y DIGITAL, LERMA GARCÍA; José luís, editorial valencia, valencia junio 2002 pág. 189
10

En el contexto de triangulación analítica esta se caracteriza por ser un proceso de
medición de objetos y las coordenadas terreno / objeto se tienen de manera
numérica e indirecta: es decir a través de mediciones.
También se puede decir que la triangulación terrestre y la triangulación aérea
(aerotriangulación) se utiliza mucho en tareas de fotogrametría ya que estas no
brindan información como la de conocer parámetros de orientación de las
imágenes y por otro las ventajas que reporta.
La triangulación tiene como objetivos determinar los parámetros de orientación
exterior de la fotografía y determinar las coordenadas terreno de puntos leídos en
instrumento utilizando pocos puntos medidos en el terreno que permitirán las
orientaciones de las fotografías.
La triangulación tiene un proceso que consta de cuatro fases:
1. Preparación de las imágenes que se van a procesar, se analizan los
recubrimientos y se recopila esta información y las de los puntos de apoyo
de las cámaras.
2. Determinación de los puntos de paso, estos se basan en la determinación
de las coordenadas de la imagen, la identificación de dichos puntos.
3. Medición de las coordenadas de las imágenes y de los puntos de apoyo
4. Verificación y análisis de datos, determinación de parámetros, análisis de
errores y ajuste de las fajas o bloques.
11

La triangulación fotogramétrica es una generalización de la resección en el
espacio de una sola imagen fotográfica, la determinación de las coordenadas
tridimensionales objeto / terreno de los puntos establecidos.
Los desarrollos de software para la compensación de la Triangulación Aérea
marcan todo un hito en la historia del diseño y elaboración de técnicas
fotogramétricas. Estos desarrollos comienzan a ser contribuciones importantes y
las Universidades encuentran una nueva e interesante posibilidad en este terreno.
En épocas de la Fotogrametría Analógica todos los avances se producían en el
desarrollo de instrumentos y, por lo tanto, las contribuciones de grupos de
investigación fuera de las grandes fábricas de instrumentos eran realmente
exiguas.
En este tiempo se asiste a la transición que lleva de los procedimientos analíticos
a los digitales. El arrollador desarrollo de la informática, especialmente a partir de
1980, que hizo posible, a un costo razonable, el almacenamiento de grandes
cantidades de datos, y que redujo los tiempos de procesamiento a valores
increíblemente pequeños, trajo como consecuencia la irrupción de los
procedimientos digitales en la Fotogrametría.
En los últimos años, el avance de los procedimientos digitales ha sido
considerable. Se ha conseguido la correspondencia automática de imágenes con
precisiones subpixel, con lo cual varias tareas fotogramétricas como las
orientaciones, la rectificación, la confección de la ortofoto, o la aerotriangulación,
12

se agilizan más que notablemente y podrían llevarse a cabo casi sin participación
de un operador humano.
La Fotogrametría digital ha venido empleando hasta ahora un procedimiento
híbrido: obtención de fotografías con la cámara analógica tradicional y posterior
digitalización empleando escáneres de alta precisión. Sin embargo, en estos
últimos años se han producido grandes avances en la construcción de cámaras
digitales con una calidad de imagen y precisión similar a la de las cámaras aéreas
tradicionales.
La Fotogrametría se encuentra hoy ante todo un verdadero desafío. Schenk
señala que “Los fundamentos de la Fotogrametría permanecen inalterados, pero el
entorno operacional ha cambiado significativamente”.
4.1.3 RECTIFICACIÓN CONVENCIONAL
Una fotografía desde el punto de vista de la geometría proyectiva es una
proyección central del terreno sobre el plano del negativo. (Jáuregui Manuel;
2007).
La formación de la imagen se asume que tiene lugar por intermedio de líneas
rectas que partiendo desde el objeto pasan a través de un punto común (centro de
proyección), el cual corresponde con una posición dentro del lente de la cámara, y
continúan hasta el plano del negativo, cumpliendo la condición de colinealidad.
13

En la actualidad, la mayoría de los programas de tratamiento digital de fotografías
realizan rectificación proyectiva plana de forma gráfica directamente sobre el
monitor, ajustando la imagen visualmente en forma aproximada. En un
procedimiento riguroso para la rectificación proyectiva plana de una imagen
fotográfica aérea, se hace uso de puntos de control terrestre.
La rectificación proyectiva plana establece la relación que permite la proyección de
puntos entre dos planos no paralelos entre sí. Mediante el uso de fotografías
aéreas y su procesamiento digital aplicando la transformación proyectiva, es
posible la generación en forma rápida y simple de fotoplanos de la superficie del
terreno. Un fotoplano es una representación fotográfica de la superficie del terreno
realizada a partir de fotografías áreas verticales del mismo, equivalente a un plano
topográfico en cuanto a sus características geométricas. A diferencia de los planos
lineales, el fotoplano muestra toda la información de la superficie del terreno en
forma fotográfica.
Esta técnica se puede aplicar a fotografías terrestres permitiendo obtener
productos similares a los anteriores como fotoplanos de fachadas.
La rectificación proyectiva de imágenes bidimensionales es una tarea muy
solicitada en entornos de documentación patrimonial, principalmente
arquitectónica y arqueológica. Dicho requerimiento exige que el objeto sea plano,
o que pueda ser descompuesto en objetos planos.
14

4.1.4 Transformación proyectiva
La transformación proyectiva plantea la relación existente entre 2 planos los
cuales se pueden definir en una transformación con 8 parámetros que pueden
resolverse conociendo más de 4 puntos de control y sus correspondientes
coordenadas imagen.
Esta transformación podría escribirse de la siguiente manera:
Consecuentemente se tienen las siguientes ecuaciones:
Lo cual nos lleva a plantear en dos ecuaciones con 8 parámetros así:
15

4.1.5 Teoría estereofotogrametría
La fotogrametría digital es una técnica por medio de la cual podemos procesar
imágenes fotográficas, utilizando un Hardware y un Software, (ISPRS, 1988
Tomado de Cuartero Sáenz, 2001) que permite generar un modelo estereoscópico
para la medición de puntos homólogos en diferentes pares de imágenes.
A partir de la lectura de coordenadas de la imagen (X, Y) de los puntos
homólogos, en 2 fotografías, se pueden determinar las coordenadas en el terreno
(X, Y y Z) de los puntos leídos, mediante los cuales podemos deducir de la
fotografía de un objeto, la forma y dimensiones del mismo.
Para la reconstrucción tridimensional de objetos a partir de imágenes digitales, las
coordenadas espaciales se calculan con base en las coordenadas de las
proyecciones en las imágenes. La visión estereoscópica requiere identificar puntos
asociados al mismo elemento en diferentes imágenes. En este trabajo utilizamos
un procedimiento de reconstrucción 3D, empleando una cámara digital no métrica.
La fotogrametría digital (Lerma 2002), trabaja con fotografías en formato digital, ya
sean tomadas directamente con una cámara digital o escaneadas a partir de
imágenes análogas.
16

Consecuentemente la materia prima para la fotogrametría digital es la imagen
digital lo cual conlleva a que esta etapa inicial en un flujo de trabajo de la
fotogrametría digital sea la captura de esta imagen (Karl Ludwig).
A partir de esta etapa se pueden realizar las diferentes aplicaciones como se
ilustra en la imagen 1 que muestra los diferentes procesos.
Figura 1: Flujo de trabajo en fotogrametría digital
CAPTURA DE IMAGEN
AEROTRIANGULACIÓN
CAPTURA DE DATOS
MODELAMIENTO DEL TERRENO
PROCESAMIENTO DE LA ORTOFOTO
Fuente: Photogrametry workflow
4.2 EXPERIENCIAS EN EL USO DE LA FOTOGRAMETRÍA TERRESTRE
De las aplicaciones en el área geotécnica se puede mencionar la realizada
por RIEKE – ZAPP et al y Santel 2001 la cual se desarrolló para conocer la
erosión de un suelo, construyendo un campo de prueba artificial sobre el
cual se tomaron fotografías antes y después de eventos de lluvia. Los test
17

fueron realizados en colaboración con el Institute of Photogrammetry and
geoinformation (IPI) University of Hanover y el National Soil Erosión
Research Laboratory West Lafayete Indiana.
Se tomo un modelo estereoscópico de la situación inicial y posteriormente,
después de 4 eventos de lluvia se realizó una segunda toma para calcular
los modelos digitales de terreno antes y después. Este ensayo permitió
evaluar la cantidad de suelo erosionado.
El artículo Terrestrial photogrammetry and application to modeling
architectural objects se enfoca en el área arquitectónica.
Es interesante ver como a través de la fotogrametría terrestre y sus
aplicaciones se puede modelar objetos en 3 dimensiones y restablecer las
condiciones de terreno en oficina que permitan recrear en modelos la
misma situación real para llevar a cabo las mediciones y digitalizar objetos
arquitectónicos de gran valor.
El artículo Restitución fotogramétrica aplicada a la representación de
fachadas arquitectónicas muestra la versatilidad y bondades de los
métodos fotogramétricos para la restitución de fachadas teniendo en cuenta
que ha sido sugerido por el Consejo Internacional de Monumentos y Sitios
Históricos (ICOMOS), como una herramienta que permite reconstruir y
medir sobre imágenes tomadas sobre fachadas.
18

Para conocer el uso de la fotogrametría terrestre en el reconocimiento,
validación y documentación de sitios arquitectónicos de valor incalculable
permitiendo su conservación histórica, arqueológica y restauración de
construcciones se puede consultar el artículo escrito por SAMUHELOVÁ
teniendo en cuenta que ha sido posible medir en estos modelos
tridimensionales e imágenes monoscópicas las dimensiones de los objetos.
19

5 METODOLOGÍA
En el laboratorio de GeoLab se realizó la simulación de la perforación de un túnel,
la cual permitiría conocer las deformaciones que se pueden presentar durante el
proceso.
Consecuentemente este proyecto fue planteado por el Ing. Mendoza con el fin de
dar a conocer un método alterno, para determinar los desplazamientos de manera
indirecta en el modelo de suelo determinado.
El proyecto se interesó por revisar y analizar la información plasmada en
diversidad de documentos que permiten la comprobación del tema expuesto,
ofreciendo aportes significativos para la problemática propuesta en esta
investigación.
De igual forma, este proyecto tuvo un enfoque cuantitativo, debido a que se basó
en la recolección y adquisición de la información en el campo con el fin de agrupar
las características de los desplazamientos producidos por los diferentes
movimientos del terreno.
Del mismo modo, el estudio de los desplazamientos en los modelos
estereoscópicos a partir de registros fotográficos por medio de imágenes tomadas
a los modelos con cámaras no métricas se llevó a cabo a través de una serie de
fases las cuales están descritas más adelante.
20

5.1 INTRODUCIÓN USO DE CÁMARAS DIGITALES NO MÉTRICAS
Las cámaras digitales ofrecen comodidad por su tamaño, peso y facilidad de
transporte; gran flexibilidad sobre todo las que incorporan distancias principales
variables (zoom), objetivos intercambiables y mecanismos de automatización;
facilidad de adquisición (compra).5
Las cámaras no métricas son cámaras de geometría inestable, los parámetros de
orientación se desconocen total o parcialmente.
El diseño de estas cámaras no está hecho para estudios fotogramétricos pero
ahora la utilizan muchos en mayor o menor grado. Sin embargo en algunos casos
los trabajos de fotogrametría aérea, terrestre y de objeto cercano puedan usar las
cámaras métricas, cámaras semimétricas o no métricas, cuando los trabajos no
precisan una exactitud posicional y muy alta.
Las cámaras no métricas tienen una limitaciones frente a las cámaras métricas
pudiéndose establecer sus causas así:
1. Geometría interna desconocida
2. Sistema de lentes imperfectos
5 Op Cit P. 336 - 341
21

5.2 MÉTODO Y ALTERNATIVA PARA LA CALIBRACIÓN DE CÁMARAS
Aunque no se realizó la calibración de la cámara con métodos analíticos se
llevaron a cabo procedimientos para conocer la precisión que se podía alcanzar
con estas cámaras.
Utilizamos un campo de calibración técnico que requiere la medición precisa de
una serie de puntos fijos cuyas coordenadas objeto se conocen. La orientación
simultánea de un grupo de fotografías del campo obtenidas con la cámara a
calibrar y el uso de un software de ajuste nos permite determinar aquellos
parámetros desconocidos (distancia principal, coordenadas del punto principal, y
parámetros definidores de la distorsión) mediante la búsqueda de la solución
óptima por ajuste por mínimos cuadrados, que garantizan precisión en las
medidas.
La calibración así obtenida es de total garantía y la experiencia nos está
demostrando que son fiables como documentación métrica las fotografías
obtenidas con una cámara digital no métrica.
De todos modos, la calibración por este procedimiento no deja de ser laboriosa, y
aunque imprescindible cuando se quieren utilizar las fotografías para medición
tridimensional, sobre todo mediante fotogrametría estereoscópica, su realización
requiere disponer del software adecuado, haberse construido el campo de
calibración y tener unos conocimientos y experiencia sobre el tema.
22

5.3 ALTERNATIVA PARA CONOCER LA PRECISIÓN EN FOTOGRAFÍAS CON
CÁMARAS NO MÉTRICAS
5.3.1 Consideraciones geométricas en la medición de puntos en las
fotografías
Como se ha mencionado anteriormente, el principal objetivo de la fotogrametría
es medir sobre las fotografías que se toman a los objetos y así describir
geométricamente su forma y extractar la información necesaria para las
aplicaciones que se requieren. Consecuentemente se ve la necesidad de
realizar un análisis sobre las precisiones que se pueden alcanzar tanto con el
uso de imágenes individuales como con imágenes estereoscópicas montadas
en una estación digital fotogramétrica.
5.4 TABLERO DE PRUEBAS
Con el propósito de determinar las precisiones que se pueden obtener en las
lecturas sobre las imágenes monoscópica y estereoscópicamente se elaboró
un tablero con una cuadricula de 10 cm. X 10 cm. de resolución estableciendo
algo similar a un sistema cartesiano de referencia sobre el cual se clavaron
unas puntillas sobresaliendo a diferentes alturas.
Se tomaron fotografías individuales de frente al tablero y otras formando par
estereoscópico de tal forma que se obtuviera recubrimiento longitudinal del
tablero para poder orientar estas imágenes en una estación digital
fotogramétrica.
23

5.4.1 Rectificación convencional de la fotografía del tablero
De las fotografías que se tomaron del tablero de pruebas de frente se
seleccionó la imagen digital DSC07537.jpg para ser utilizada y rectificada sobre
la cual se realizaron las mediciones requeridas.
Se utilizó el software XY Rectify de origen australiano que permite rectificar las
imágenes digitales a partir de unos puntos de control que se encuentren
repartidos en el área de la imagen.
Figura 2: Puntos de control del tablero de pruebas
Fuente: XY Rectify - Propia
Las coordenadas de los puntos de control que se utilizaron para la rectificación
son:
24

Tabla 1: Coordenadas de los puntos de control tablero de pruebas
PUNTO X Y
T1 10.100 20.200 T2 10.100 20.500 T3 10.100 20.900 T4 10.900 20.200 T5 10.900 20.500 T6 10.900 20.900
Sobre la imagen rectificada DSC07537_rect.jpg se tomaron las coordenadas una
serie de puntos (20 puntos) que permitieran comprobar la precisión con la cual se
rectifica la imagen calculándose los errores en cada uno de los puntos y
obteniendo un error medio cuadrático RMS de 2.2 mm en el eje de las X y 2.24
mm en el eje de las Y. (VER TABLA 2, ANEXO A)
25

Figura 3: Puntos tomados para comprobar precisión
Fuente: Propia
Una vez rectificada la imagen, se considero importante establecer la precisión con
la cual se podía medir en el software que se utilizaría para medir los
desplazamientos de los testigos que se instalarían en el frente del modelo físico
geotécnico. En el software ArcGis Versión 9.2 se realizarán las medidas para lo
cual se recreo la situación con la imagen rectificada DSC07537_rect.jpg,
georeferenciándose con los puntos de control necesarios y adicionalmente
tomando mediciones de algunos puntos para chequear y comprobar la precisión
en la determinación y lectura de coordenadas en las imágenes montadas en el
software de ArcGis.
26

Figura 4: Testigos iniciales del tablero de pruebas (ptos verdes)
Fuente: ArcGis – Propia
El error medio cuadrático encontrado RMS es de 2 mm para el eje de las X y
2.408 mm para el eje de las Y. (VER TABLA 3)
27
5.5 USO DE IMÁGENES ESTEREOSCÓPICAS
Teniendo en cuenta que se tiene programado la medición de puntos en imágenes
que formen pares estereoscópicos, se considero oportuno realizar mediciones
sobre un par estereoscópico del tablero de prueba, donde las fotografías en su
recubrimiento longitudinal contengan todo el tablero y pudiera montarse el par en
una estación fotogramétrica digital.
Para llevar a cabo estas mediciones se seleccionó el par de imágenes
DSC07538.jpg y DSC07537.jpg las cuales fueron orientadas en una estación
fotogramétrica digital con el software Summit Evolution de la casa DATEM de
Canadá que permite realizar todas las orientaciones para recrear un modelo
estereoscópico.
Se creó el proyecto con la característica de uso de imágenes digitales y con
puntos de control muy bien definidos en las aerofotografías. Las imágenes fueron
convertidas al formato smti del software Summit Evolution.
28

Figura 5: Estructura en el editor de proyectos en el software summit evolution
Fuente: software summit evolution
Una vez estructurado el proyecto con sus componentes se procedió a realizar la
orientación relativa del modelo que permitiera recrear el modelo del tablero en tres
dimensiones. La distribución de puntos para eliminar el paralaje en Y fue la misma
distribución de puntos de Von Gruber dando como resultados los siguientes
residuales en cada uno de los puntos como se observa en la siguiente imagen y
obteniendo un error medio cuadrático de RMS = 1.3 micrones.
29

Figura 6: Residuales de orientación relativa
Fuente: software summit evolution
Posteriormente este modelo fue sometido a la orientación absoluta para escalar y
nivelar el modelo estereoscópico y referenciarlo a un sistema cartesiano de
coordenadas que permitiera realizar mediciones de puntos sobre este modelo para
calcular las desviaciones estándares y tratar de establecer unos márgenes de
error que se pudieran obtener cuando se realizan mediciones utilizando estaciones
fotogramétricas digitales y fotografías digitales tomadas con cámaras no métricas.
Los resultados de la orientación absoluta del modelo orientado anteriormente se
presentan en la siguiente imagen que permite visualizar que los residuales en XY
son del orden de 26 milímetros mientras que los residuales en la componente Z
están del orden de 2 milímetros.
30
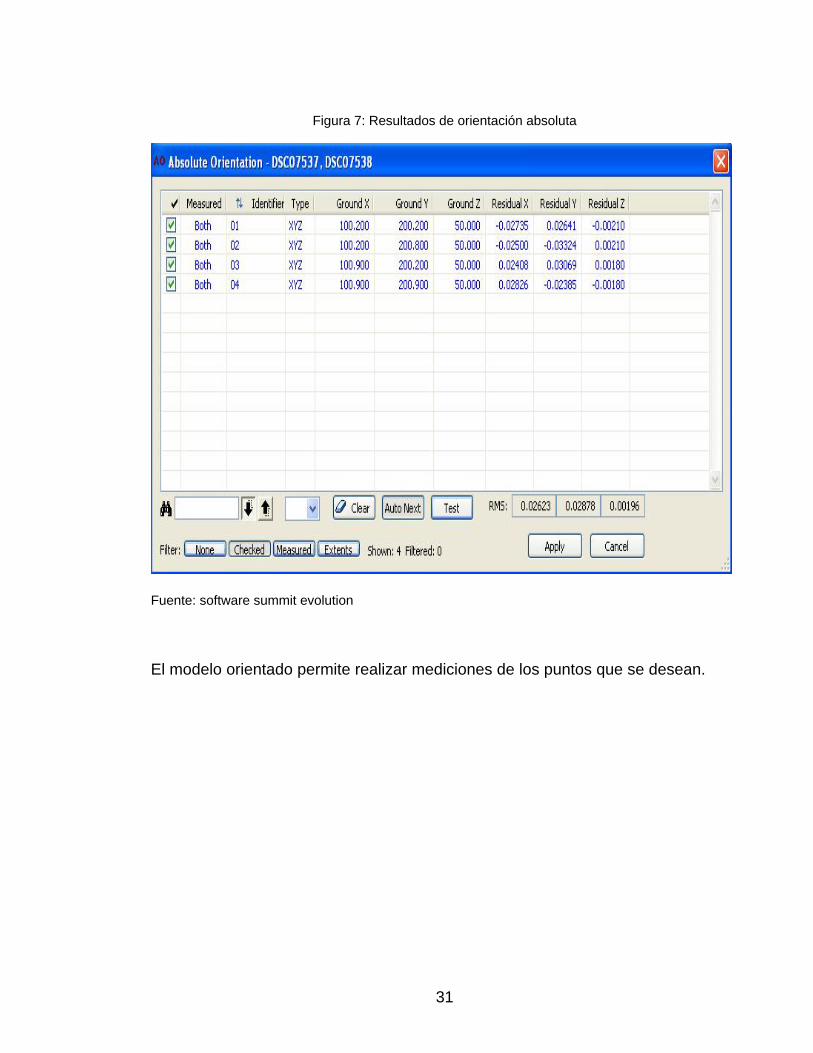
Figura 7: Resultados de orientación absoluta
Fuente: software summit evolution
El modelo orientado permite realizar mediciones de los puntos que se desean.
31

Figura 8: Imagen tomada de la pantalla mostrando una de las imágenes que forman el par estereoscópico.
Fuente: XY Rectify
5.6 RECTIFICACIÓN CONVENCIONAL – USO DE IMÁGENES INDIVIDUALES
Como un aporte significativo a la investigación que adelanta el Ing. Torres, se
consideró oportuno medir los desplazamientos que se podían presentar en el
terreno a medida que se realizara la excavación del túnel. Para esto se vio la
posibilidad de usar fotografías individuales que fueran rectificadas y referenciadas
sobre las cuales se pudiera medir, por lo cual se acordó tomar fotografías de
32
frente al túnel en diferentes instantes desde el inicio de la excavación, hasta el
final de esta y en una etapa intermedia.
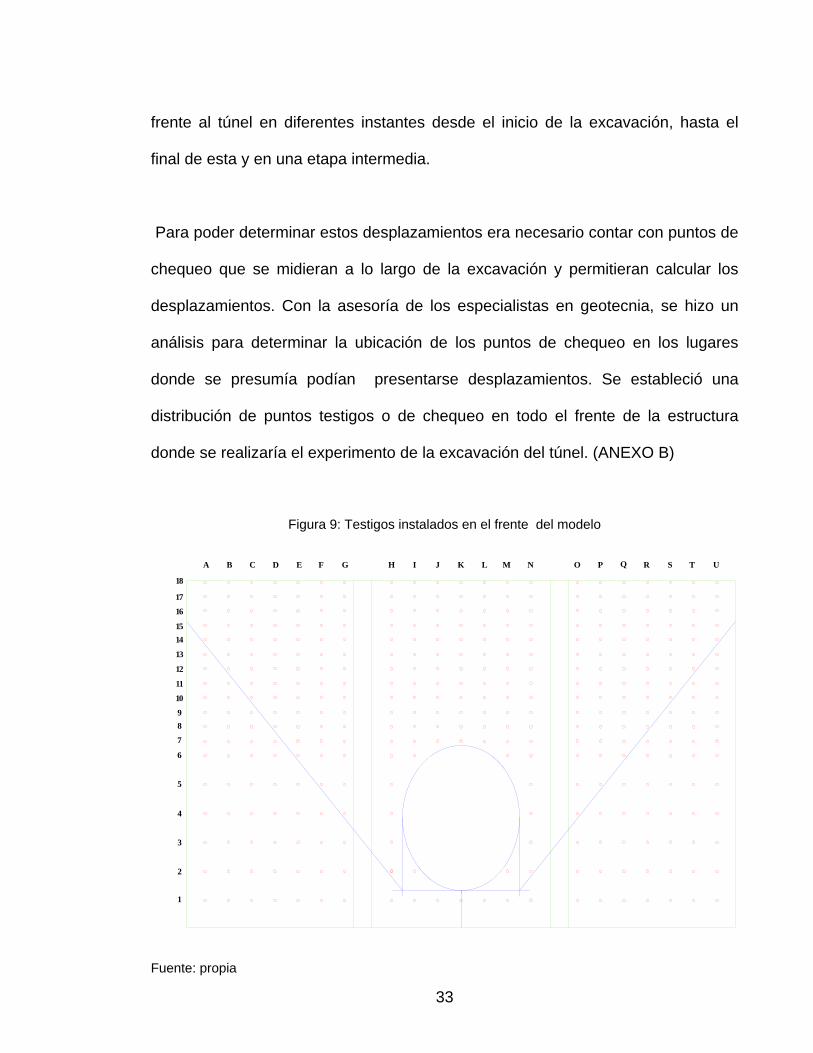
Para poder determinar estos desplazamientos era necesario contar con puntos de
chequeo que se midieran a lo largo de la excavación y permitieran calcular los
desplazamientos. Con la asesoría de los especialistas en geotecnia, se hizo un
análisis para determinar la ubicación de los puntos de chequeo en los lugares
donde se presumía podían presentarse desplazamientos. Se estableció una
distribución de puntos testigos o de chequeo en todo el frente de la estructura
donde se realizaría el experimento de la excavación del túnel. (ANEXO B)
Figura 9: Testigos instalados en el frente del modelo
A B C D E F G H I J K L M N O P Q R S T U
1
2
3
4
5
6
7
98
10
11
13
1415
16
17
12
18
Fuente: propia
33

En la figura 9 se observa la distribución de cada uno de los testigos. Estos testigos
elaborados en balso con una longitud de 10 cm fueron ubicados a medida que el
material de suelo se vertía y compactaba en el modelo geotécnico. Se tuvo
especial cuidado para que los testigos quedaran en las posiciones programadas
de acuerdo con el estudio inicialmente realizado.
Igualmente se establecieron puntos de control a lo largo de los parales verticales,
los cuales se pudieran ubicar y medir con toda la precisión necesaria y en
posiciones que no tuvieran cambios o modificaciones durante los ensayos de la
perforación. Se determinó un sistema cartesiano arbitrario y se le asignó unas
coordenadas a un punto en el sector inferior del paral izquierdo y a partir de este
se calcularon las coordenadas de los otros puntos de control.
Se seleccionó la fotografía SDC10103.jpg que fue tomada antes de iniciar la
excavación como imagen de partida para determinar las coordenadas de los
puntos testigos para calcular sus desplazamientos. Esta imagen fue rectificada
convencionalmente utilizando el software XY Rectify tomando los siguientes
puntos como puntos de control.
Tabla 4: Coordenadas de puntos de control parte frente del modelo
A1 100.000 0.940 A5 100.002 1.341 A10 100.002 1.840 B12 100.827 0.942 B16 100.823 1.344 B20 100.827 1.743
34

La imagen Rect_10103 muestra la fotografía rectificada después de ser procesada
la cual se utilizará para realizar las mediciones de los puntos. En esta imagen se
puede apreciar la ubicación de todos los testigos tal y como se programaron
inicialmente.
Figura 10: Imagen rect_10103
Fuente: Propia
Para medir los desplazamientos de los testigos se utilizará el software ArcGis 9.2
en el cual se montarán las imágenes rectificadas. Para referenciarla en un
sistema cartesiano se utilizaron los mismos puntos de control que fueron usados
35

en la rectificación. Una vez se tiene debidamente referenciada la imagen se
procedió a digitalizar el elemento o feature Pto_instrumentacion que corresponde
a los puntos testigos que se tienen en toda la fachada del modelo geotécnico.
Estos puntos digitalizados tendrán coordenadas en el sistema cartesiano
establecido.
Figura 11: Imagen rect_10103 con la digitalización de los puntos de instrumentación y puntos de control
Fuente: ArcMap - ArcInfo
36

Con el propósito de medir desplazamientos de los testigos se procedió a rectificar
la fotografía DSC10371.jpg tomada cuando se tenía escavado un 60% del túnel.
En la imagen 12 se puede apreciar los desplazamientos de los puntos.
Figura 12: Imagen rect_101371
Fuente: Propia
A esta imagen se le hizo un proceso similar que a la primera fotografía y se
utilizaron los mismos puntos de control. Una vez rectificada se montó en ArcGis la
imagen en el mismo frame que la anterior ajustándola a los mismos puntos de
control. Esto permite digitalizar los puntos que se observan en la fachada y que
37
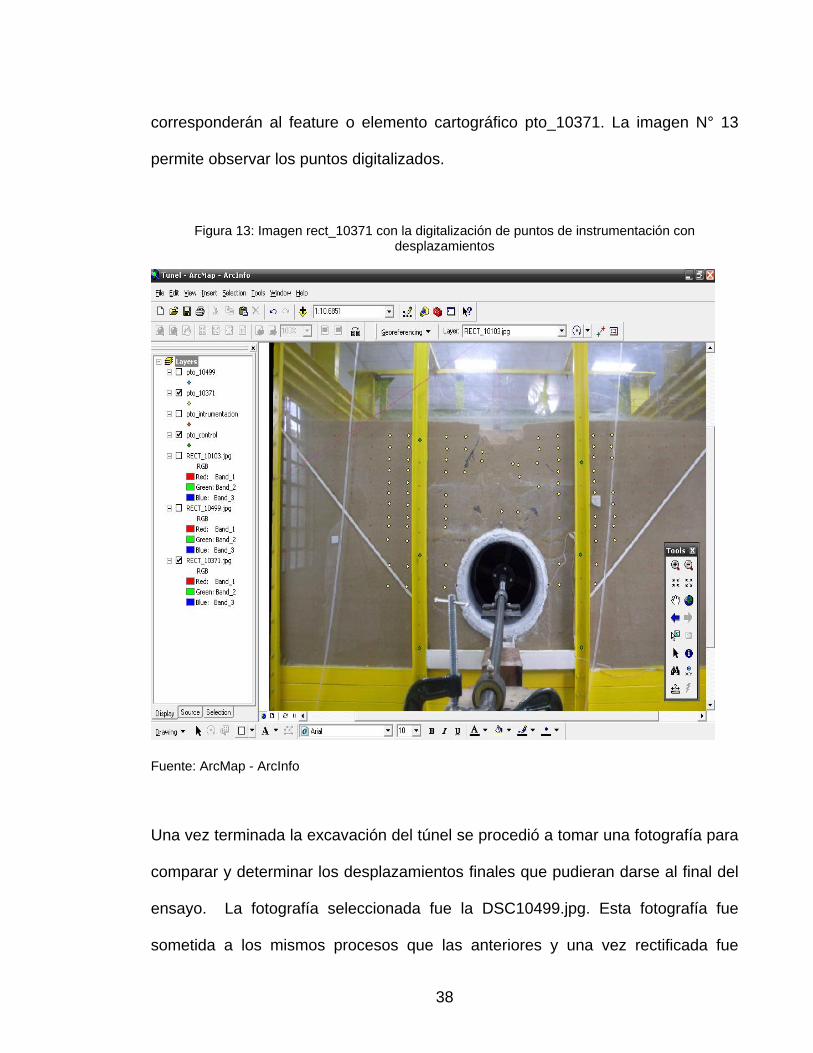
corresponderán al feature o elemento cartográfico pto_10371. La imagen N° 13
permite observar los puntos digitalizados.
Figura 13: Imagen rect_10371 con la digitalización de puntos de instrumentación con desplazamientos
Fuente: ArcMap - ArcInfo
Una vez terminada la excavación del túnel se procedió a tomar una fotografía para
comparar y determinar los desplazamientos finales que pudieran darse al final del
ensayo. La fotografía seleccionada fue la DSC10499.jpg. Esta fotografía fue
sometida a los mismos procesos que las anteriores y una vez rectificada fue
38

referenciada en el mismo frame en ArcGis donde se digitalizó el elemento
Pto_10499 que corresponde a los puntos que se observan en el frente del modelo.
Figura 14: Imagen rect_10499 con la digitalización de los puntos de instrumentación y su desplazamiento final
Fuente: ArcMap - ArcInfo
5.6.1 Determinación de los desplazamientos
Para visualizar y calcular los desplazamientos que se presentaron durante la
excavación se hicieron las comparaciones entre los puntos digitalizados en la
39

imagen inicial y la imagen intermedia así como entre los puntos digitalizados en la
imagen inicial y la imagen final.
En la imagen 15 se puede observar los desplazamientos que se presentan en los
puntos en la zona central del modelo.
Figura 15: Imagen rect_10371 desplazamientos en el modelo
Fuente: ArcMap - ArcInfo
Se extractaron las coordenadas de los puntos digitalizados en la foto inicial e
intermedia para calcular los desplazamientos en los ejes X y Y y su valor absoluto
teniendo especial cuidado de identificar el mismo punto en ambas situaciones. El
resumen de los desplazamientos se presenta en la TABLA 5.
40

Igualmente se utilizó la fotografía final y se procedió a extractar las coordenadas
de los puntos digitalizados en la foto inicial y final para calcular los
desplazamientos finales en los ejes X y Y. En la imagen 16 se puede apreciar que
entre el proceso intermedio y final también se presentaron desplazamientos
diferenciales en algunos puntos que pueden ser calculados si así se requiere.
Figura 16: Desplazamientos finales e intermedios del modelo
Fuente: ArcMap - ArcInfo
El resumen de los desplazamientos finales que se pueden calcular con la imagen
final se presenta en la TABLA 6
41

En la imagen 17 se puede observar la distribución y ubicación de todos los puntos
a lo largo del ensayo
Figura 17: Desplazamientos totales presentados en el modelo
Fuente: ArcMap - ArcInfo
Estos resultados han sido trasmitidos al Ing. Torres y sus colegas para ser
analizados desde el punto de vista geotécnico buscando su aplicación en el área
que corresponde.
42

5.7 MODELAMIENTO ESTEREOSCÓPICO - ESTEREOFOTOGRAMETRÍA
Sin lugar a dudas, una de las principales aplicaciones de la fotogrametría es
medir en modelos estereoscópicos y extractar la información requerida en los
modelos tridimensionales. Es así como, hablando de las deformaciones que se
presentan durante y después de la excavación de un túnel, se planteo el
fenómeno de subsidencia y su influencia en el desarrollo de un proyecto de esta
categoría.
Los especialistas de geotecnia programaron la utilización de sensores en algunos
sitios que permitieran calcular las deformaciones que se presentarían.
Paralelamente se vio la posibilidad de medir alguna variable que permitiera facilitar
el cálculo de estos fenómenos utilizando la fotogrametría y en un momento dado
poder verificar y comparar los resultados obtenidos por métodos geotécnicos con
sensores y los resultados que se obtuvieran con la fotogrametría. Se consideró
factible tomar fotografías sobre la cara superior del modelo geotécnico y ver la
posibilidad de calcular movimientos de tierra en el modelo y particularmente
verificar movimientos sobre la cara superior usando modelos digitales de
superficie para calcular diferencias, usando fotografías tomadas al inicio de la
excavación y una vez se terminara esta.
Para iniciar el desarrollo de la investigación, se consideró que se podían
establecer unas condiciones similares a la toma de fotografías aéreas pero sin
una plataforma aerotransportada sino desde el terreno llevando a estudiar la
43

forma de tomar fotografías con recubrimiento longitudinal para recrear modelos
estereoscópicos y generar modelos digitales de superficie. Los análisis que se
hicieron llevaron a crear un sistema de rieles que permitiera montar las cámaras
digitales las cuales tomarían las fotografías en determinadas posiciones para
formar los modelos. La falta de experiencia en este tipo de investigaciones y
ensayos, llevaron inicialmente a pensar en el uso de dos cámaras para cubrir toda
la superficie la cual con una sola cámara no era suficiente. Sin embargo, después
de la toma de fotografías y estudio de estas se determinó utilizar únicamente la
cámara A para todos los estudios y análisis pues las fotografías cubrían toda el
área que se requería para estudiar.
Las condiciones físicas del laboratorio requerían que la toma de fotografías fuera a
distancia por cuanto era imposible estar encima del modelo geotécnico y tomar las
fotografías durante el ensayo de excavación. Se ideó un sistema tipo hidráulico
utilizando jeringas y manguera que facilitara los disparos y tomas de fotografías
desde el piso sin obstaculizar el ensayo.
La imagen 18 muestra el montaje que se realizó para la toma de las imágenes
fotografías.
44

Figura 18: Montajes de la cámara superior
Fuente: Propia
Para poder recrear los modelos estereoscópicos es necesario contar con puntos
de control que permitan la orientación de las fotografías. Estos puntos son
establecidos en terreno en su totalidad o se pueden establecer a partir de
mediciones en terreno y en oficina a través de procesos de aerotriangulación, lo
cual requiere de unos pocos puntos de fotocontrol medidos en terreno.
Se optó por usar métodos de aerotriangulación y por consiguiente se determinó
elaborar una cuadricula fija con cuerdas sobre la cara superior del modelo
geotécnico que es la superficie sobre la cual se tomarían las fotografías y que
facilitará establecer los puntos de fotocontrol. Esta cuadricula o malla no interfiere
en nada con el ensayo y permanece intacta durante todo el desarrollo del mismo.
Se fijaron unas dimensiones aproximadas de espaciamiento entre las cuerdas. La
imagen 19 muestra el establecimiento y la distribución de las cuerdas.
45

Figura 19: Distribución de la malla que servirá de puntos de control
Fuente: Propia
Teniendo en cuenta que la superficie de la cara superior del modelo presenta una
imagen muy homogénea ya que está formada por un material que aparenta una
textura de tapete, se consideró oportuno colocar unos chinches que tuvieran la
función de puntos de chequeo y facilitaran la identificación, interpretación y
localización de imágenes y sirvieran para posteriores estudios y así continuar con
futuras investigaciones
Para obtener fotografías con el recubrimiento longitudinal adecuado se calculó la
distancia en que debía existir entre fotografía y fotografía y se establecieron los
puntos sobre los rieles donde se estacionaria la cámara para la toma de cada una
de las fotografías.
46

Figura 20: Distribución y ubicación para las posiciones de toma de fotografías en el riel
Fuente: Propia
Antes de iniciar el ensayo de excavación se tomaron las fotografías de la foto 283
a la foto 292 que forman una línea completa y que corresponde a la faja inicial. El
anexo C muestra un mosaico con las fotos sobrepuestas una encima de la otra de
la faja inicial.
El recubrimiento longitudinal de estas fotografías es de 75 a 80% y permiten
recrear tridimensionalmente toda la superficie de la cara superior del modelo
geotécnico.
47

Una vez terminada la excavación del túnel se procedió a tomar nuevamente
fotografías en las mismas posiciones aproximadas que las anteriores para recrear
los modelos estereoscópicos finales y formar así la faja de fotografías finales. El
anexo D muestra un mosaico de la faja con las fotografías finales sobrepuestas.
Con las fotografías seleccionadas se procedió a elaborar los proyectos
fotogramétricos y montar toda la información en el software de INPHO cuya casa
matriz se encuentra en Alemania. Este software, de última generación, tiene
diferentes aplicaciones y módulos que permitirán establecer el proyecto y sus
componentes, realizar una aerotriangulación automática y generar los modelos
digitales de superficie de forma automática.
5.7.1 Establecimiento del proyecto inicial
Con la fotografías de la faja inicial se procedió a elaborar y crear el proyecto
fotogramétrico inicial.prj en el software INPHO. Se utilizara un sistema cartesiano
métrico como sistema de coordenadas.
48

Figura 21: Establecimiento del proyecto inicial
Fuente: software INPHO
Las fotografías fueron tomadas con una cámara DSC_W80 de Sony que permitió
obtener imágenes de 3072 X 2304 pixeles en formato jpg y cuyo tamaño del pixel
es de 5 micrones.
49

Figura 22: Creación de la cámara digital en el software inpho
Fuente: software INPHO
Las imágenes en formato jpg fueron convertidas a formato TIF y se recrearon las
imágenes piramidales correspondientes en archivos independientes para cada una
de estas. Adicionalmente al cargar las fotografías, era necesario incluir las
coordenadas de los centros de proyección de cada una de las fotos. Para eso, en
un grafico a escala de la localización de sensores y cuadricula, se plantearon cada
50

uno de los centros de cada fotografía y se calculó en forma aproximada las
coordenadas X, Y y Z de todas las fotografías
Figura 23: Coordenadas de los centros de proyección de cada una de las fotografías
Fuente: software INPHO
Los puntos de fotocontrol se determinaron sobre toda la superficie de estudio para
lo cual se tomaron las medidas de los puntos de la cuadricula de piola elaborada
sobre la cara superior estableciendo los siguientes puntos con sus respectivas
coordenadas que fueron importados al software y que se presentan en la imagen
24
51

Figura 24: Lista de puntos de fotocontrol para el proceso de aerotriangulación
Fuente: software INPHO
Estos puntos se encuentran situados en las posiciones que se observan en el
grafico 25 (Anexo E)
52

Figura 25: Grafico de ubicación puntos control parte superior modelo
ENTRADA
SALIDA
A
B
C
D
E
F
G
H
I
J
K
4 3 2 1
SENSORES
SOPORTE SENSORES
MALLA DE REFERENCIA
MALLA CENTRAL TUNEL
DISTRIBUCIÒN DE LOSPUNTOS DE CONTROL
PUNTOS DE CONTROL
Fuente: Propia
Finalmente se recreo la faja de fotografías que se triangularía que incluye 10
fotografías.
53

Figura 26: Información de la faja inicial
Fuente: software match at de inpho
El proyecto creado con todos sus componentes puede ser sometido a los
procesos que se requieren para la orientación de las fotografías. En la imagen 27
se observan los números que corresponden a los centros de proyección de cada
fotografía y la numeración de los puntos de fotocontrol.
54

Figura 27: Centros de proyección faja inicial
Fuente: software match at de inpho
5.7.2 Proceso de aerotriangulación
Para realizar la aerotriangulación automática utilizando el software Match AT de
INPHO será necesario medir los puntos de fotocontrol en cada una de las
imágenes donde aparezca el punto y el software se encargará de generar en
forma automática utilizando la correlación de imágenes los puntos TIE que
servirán para las respectivas orientaciones de las fotografías y de los modelos
estereoscópicos.
55

La imagen 28 muestra las pantallas que el software genera para permitir la
medición de cada punto de control en la respectiva imagen.
Figura 28: Medición de puntos de control
Fuente: software match at de inpho
Una vez medidos los puntos de fotocontrol se procede a establecer los parametros
para realizar la generacion de puntos TIE en forma automatica y proceder a
realizar el ajuste de las fotografias y calcular las coordenadas terreno de todos
estos puntos generados automaticamente.
56

La selección y determinacion de puntos TIE se hace utilizando la correlacion de
imágenes a traves de dos metodos que corresponden a los metodos de: método
de minimos cuadrados LSM (Least Square Matching) o niveles de gris y al
metodo de feature o caracteristicas FBM (Feature Based matching)
Figura 29: Parámetros y valores estratégicos para la correlación de imágenes
Fuente: software match at de inpho
57

Igualmente se establecen unos valores para los coeficientes de correlacion de
mas del 92% que garanticen la precision en la selección y medicion de estos
puntos TIE automaticos.
Figura 30: Coeficientes de correlación
Fuente: software match at de inpho
El software hace la extraccion de puntos y realiza el ajuste de todas las fotografias
de la faja llevandolas a orientar absolutamente todas las imágenes.
58

Los resultados finales completos obtenidos en el ajuste se pueden observar en el
anexo F que incluye la informacion concerniente a los errores y las precisiones
obtenidas despues de ajustar todas las fotografias. Se puede observar que los
errores en la determinacion de puntos homólogos no se supera los 3.3 micrones
en el eje X y 2.5 micrones en el eje Y en los errores medios cuadraticos , lo que
resulta en un proceso de muy buena precision.
Figura 31: Resultados de ajustes de las fotografías
Fuente: software match at de inpho
59

Igualmente se calculan los errores en los puntos de fotocontrol cuyos errores son
de pocos milimetros y los errores medios caudraticos estan del orden de 10
milimetros en X, 8 milimetros en Y y 13 milimetros en Z que resultan ser valores
con buena precision, como se puede ver en la imagen 32
Figura 32: Calculo de errores de puntos de fotocontrol
Fuente: software match at de inpho
Igualmente el proceso de aerotriangulación además de calcular puntos TIE con
sus respectivas coordenadas terreno permite calcular las orientaciones exteriores
60

de cada una de las fotografías incluidas en el proceso como se observa en la
imagen 33.
Figura 33: Orientaciones exteriores de las fotografías
Fuente: software match at de inpho
5.7.3 Generación de Modelos Digitales de Superficie
Con las fotografías orientadas se procedió a elaborar el modelo digital de
superficie DSM en forma automática utilizando Match T de la misma casa INPHO
que realiza igualmente por correlación de imágenes el DSM.
61

Estos modelos digitales de superficie se elaboran utilizando las imágenes
piramidales remuestreadas con menor resolución sobre las cuales se buscan los
puntos homólogos y se van refinando a medida que el algoritmo trabaja con uno
de los overview o imagen piramidal de mejor resolución hasta alcanzar la imagen
original la cual utiliza para calcular el valor correspondiente a la altura del punto en
estudio.
El punto de partida en cada nivel piramidal es un DSM aproximado el cual ha sido
generado en el nivel anterior. Al inicio se parte de un plano horizontal que se
introduce como una aproximación inicial.
La resolución de la grilla del DSM es cada vez dos veces mas fina que el DSM
aproximado anterior. Los modelos digitales de superficie DSM se generan con
una grilla de puntos con separación de 16 milímetros lo que genera una nube de
puntos con mucha redundancia garantizando alta calidad en la generación del
DSM. El anexo G contiene todos los parámetros, las características y valores que
se requieren y se derivan de los procesos de generación del DSM.
Este DSM que de ahora en adelante lo llamaremos modelo digital de terreno inicial
o DTM inicial se puede almacenar en diversos formatos será utilizado para
compararlo con el DTM que se obtenga de un proceso similar pero con las
fotografías finales.
62

5.7.4 Establecimiento del proyecto final
Para realizar el mismo trabajo con las imágenes tomadas después de perforado el
túnel se elaboró un nuevo proyecto final.prj, utilizando los mismos parámetros que
el inicial e incorporando las fotografías de la 535 a la 544, las cuales fueron
convertidas al formato TIF y se les crearon las imágenes piramidales igualmente.
El anexo D muestra el mosaico con las fotografías finales sobrepuestas
estableciendo la nueva faja a trabajar.
Igualmente se le calcularon los centros de proyección aproximados y se
importaron en el software. Se cargaron los puntos de fotocontrol que se utilizaron
para el ejerció inicial y se recreo la faja a trabajar como se puede observar en la
imagen 34.
63
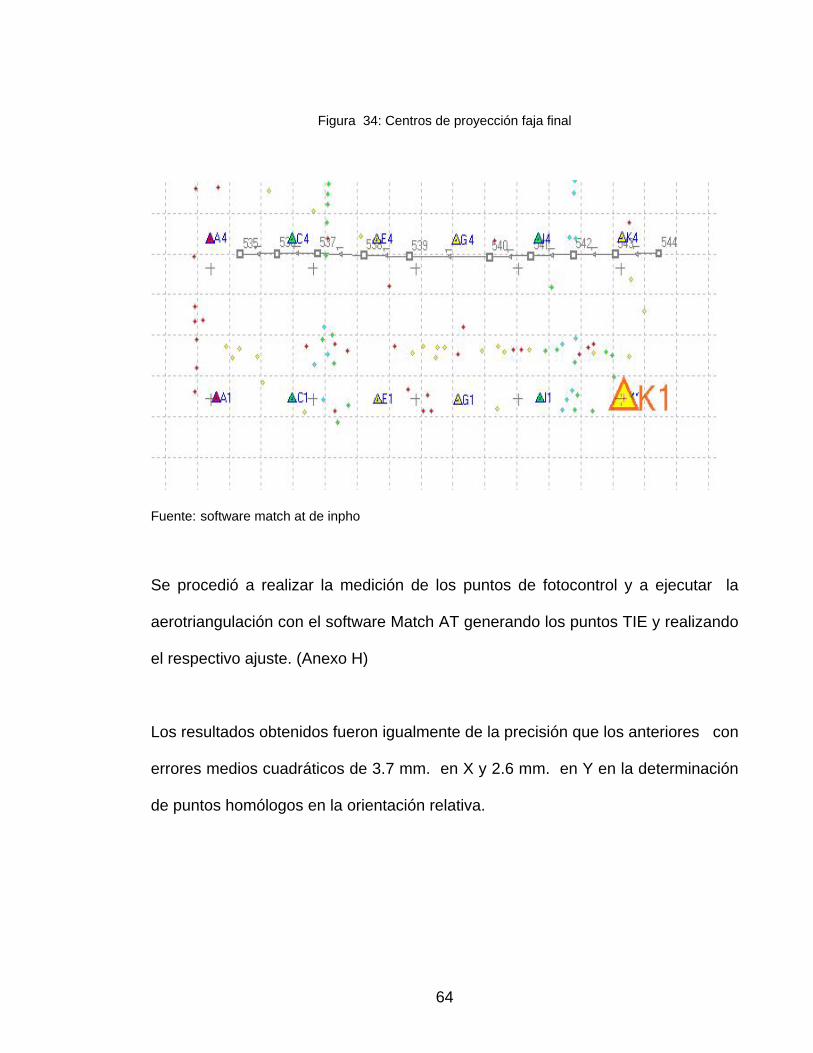
Figura 34: Centros de proyección faja final
Fuente: software match at de inpho
Se procedió a realizar la medición de los puntos de fotocontrol y a ejecutar la
aerotriangulación con el software Match AT generando los puntos TIE y realizando
el respectivo ajuste. (Anexo H)
Los resultados obtenidos fueron igualmente de la precisión que los anteriores con
errores medios cuadráticos de 3.7 mm. en X y 2.6 mm. en Y en la determinación
de puntos homólogos en la orientación relativa.
64

Figura 35: Orientación relativa faja final
Fuente: software match at de inpho
En la orientación absoluta los errores alcanzados son del orden de 9 mm. en X, 8
mm. en Y y 10 mm. En Z
65

Figura 36: Errores en los puntos de fotocontrol en la faja final
Fuente: software match at de inpho
De igual manera se procedió a elaborar el DSM con las imágenes finales
orientadas usando también el software Match T en forma automática. La grilla que
se trabajo en este caso fue similar al espaciamiento entre perfil y perfil es decir de
16 mm. Y lo mismo entre punto y punto a lo largo de los perfiles.
El DSM final o de ahora en adelante DTM final deberá ser comparado con el DTM
inicial para verificar los cambios en las alturas de los diversos puntos en toda la
superficie superior del modelo geotécnico. (Anexo I)
66

5.7.5 Proceso de comparación entre el DTM inicial y el DTM final
Estos modelos digitales se generaron en un formato .dtm para ser leído a su vez
por el software MGE Terrain Modeler de Intergraph en un ambiente de
MicroStation el cual ha sido creado para manipular y analizar modelos digitales de
terreno y crear las salidas necesarias de acuerdo con la representación que se
requiera.
Analizados los datos observamos que el suelo tuvo un hundimiento al planteado
en la hipótesis relacionado con los problemas de subsidencia. Se generó una grilla
regular que mostrara los valores de altura de cada uno de los puntos
muestreados.
Figura 37: Grilla de los puntos muestreados
Fuente: software mge terrain modeler de intergraph
67

Esto mismo se hizo con el DTM final para comparar las dos salidas y comprobar
las alturas que se calcularon en cada caso.
Se pudo constatar que hay diferencia de 8 milímetros en la zona céntrica que
corresponde a lo largo de la perforación del túnel.
En los ploteos de las mallas de punto de los proyectos inicial y final se pueden
apreciar la diferencia de elevación de los puntos a lo largo de la trayectoria de la
perforación del túnel. (ANEXO J)
68

CONCLUSIONES
• El análisis y evaluación de los resultados obtenidos a partir del proceso
fotogramétricos con las imágenes digitales permitió determinar los
desplazamientos que se presentaron en el terreno como consecuencia de
la perforación del túnel en diferentes etapas.
• El montaje de las cámaras fue muy práctico ya que lo que se pretendía era
no generarle movimiento al modelo, y el traslado a lo largo del este fue
parte importante ya que se requería de un traslapo en cada una de las
tomas para poder hacer su estudio respectivo.
• La hipótesis planteada inicialmente pudo ser comprobada, demostrando
que la fotogrametría es una herramienta muy útil como soporte para otras
áreas permitiendo compartir en proyectos multi interdisciplinarios
• El uso de cámaras digitales no métricas, aunque presenten distorsiones y
errores, son de gran ayuda para el desarrollo de proyectos en campos
como la geotecnia para realizar mediciones y poner a disposición de los
técnicos disciplinarios los resultados que se obtengan.
• La fotogrametría fue muy útil para la determinación de vectores de un punto
determinado de un suelo modelado, por medio de cámaras no métricas.
69

• Los resultados obtenidos de la subsidencia del suelo por el método de la
fotogrametría fue de 8 mm y la subsidencia que nos arrojaron los LVDT fue
del orden de 10 mm esto quiere decir que el método fotogramétrico puede
arrojar valores similares a aquellos que se midan con sensores.
• Basados en esta investigación, se puede establecer una metodología que
permita con el uso de la fotogrametría terrestre digital medir deformaciones
y realizar seguimiento de desplazamientos en los modelos geotécnicos que
se construyan en Geolab.
70

RECOMENDACIONES
• Se recomienda realizar pruebas iniciales de todo el proceso de toma de
fotografías que asegure el correcto desarrollo del proyecto.
• Es importante contar con fotografías del modelo iniciales para así
determinar las diferencias que se presentan y los desplazamientos por
medio de los puntos de chequeo que se ubiquen en el modelo.
• Es indispensable trabajar a la par con el grupo interdisciplinario cuándo se
está haciendo el llenado del modelo para poder ubicar y tener en claro la
ubicación de los puntos de control y chequeo.
• Se recomienda estudiar otras maneras de obturación de la cámara, para
facilitar su manejo.
• Estudiar alternativas para elaborar la malla de referencia que se hizo en la
parte superior del modelo para que las medidas sean más exactas.
• Adicionalmente a los productos fotogramétricos elaborados para este
proyecto, se recomienda estudiar la posibilidad de realizar ortofotos que
permitan hacer otras mediciones.
71

• Vale la pena seguir profundizando en el estudio y aplicación de la
fotogrametría terrestre en estudios geotécnicos para lo cual se requieren
calcular mejor las distorsiones que se puedan presentar con cámaras
digitales no métricas y su calibración y en posteriores procesos usando las
imágenes digitales.
72

BIBLIOGRAFIA
FAJARDO NARANJO, Edgar y BEDOYA MORENO, Julio Cesar. Guía de
procedimientos para la elaboración de modelos físicos del laboratorio Geo-Lab del
grupo de investigación “CIROC”. Trabajo de grado Ingeniero Civil. Bogotá D.C.:
Universidad de La Salle. Facultad de Ingeniería Civil, 2008
TORRES PRADA, Camilo. Principios de estudios de fenómenos geotécnicos
complejos a través de modelos. En: Épsilon. No. 11 (jul. – dic. 2008); p. 49-57
ISSN 1692125-9
Sheik, T., 2002. Fotogrametría Digital, Volumen I, Geomática. (s.d.)Editorial
Marcombo.
MARÍN RIVEROS, Natalia. Evaluación de parámetros elásticos de mezclas
artificiales de suelos para modelos del laboratorio Geo-Lab. Trabajo de grado
Ingeniero Civil. Bogotá D.C.: Universidad de La Salle. Facultad de Ingeniería Civil.
2008.
VARGAS LOPEZ, Oscar Mauricio, PARRA CRUZ, Oscar Javier. Procedimientos y
diseños de modelos físicos del laboratorio de Geo-lab del grupo de investigación
CIROC. Ingeniería Civil. Bogotá D.C.: Universidad de La Salle. Facultad de
Ingeniería Civil. Área de Geotecnia. 2009
73

LERMA GARCIA, José Luis. Fotogrametría moderna: Analítica y Digital. Editorial
de la Universidad Pontificada de Valencia. Valencia; Junio 2002.
RUIZ SARAY, Rosa Amparo. Estructura para la presentación escrita de los
informes del proyecto integrador. En: ASESORIA METODOLOGICA (1º: 2003:
Bogotá) memorias de la primera asesoría metodología para la presentación de
informes del Proyecto Integrador. Bogota: U.S.B, 2003. 15P
NIETO, Fernando y TORRES, Camilo. Evaluación del fenómeno de la subsidencia
originado por la construcción de micro-túneles en suelos blandos. Bogotá D.C.,
Universidad de La Salle. Facultad de Ingeniería Civil. 2007.
CUARTERO SÁENZ, Aurora. Fotogrametría Digital. Sistemas Fotogramétricos
Digitales. Universidad de Extremadura. 2001.
PÉREZ ÁLVAREZ, Juan Antonio. Apuntes de Fotogrametría III. Mérida,
Septiembre de 2001. Pág. 71-100; 177-180.
___________________________. Apuntes de Fotogrametría II. Mérida,
Septiembre de 2001. Pág. 7-26; 29-36; 107-104.
JÁUREGUI, Manuel. CHACÓN, Luis, VILCHEZ, José. Rectificación proyectiva
plana de imágenes fotográficas digitales, Julio de 2007.
74

DIRK H. RIEKE, Zapp. The Photogrammetric Record. Marzo de 2005. Pág. 69 –
87 Digital Close Range Photogrammetry For Measurement of Soil Erosion.
CLIVE S, Fraser. Fotogrammetry & Remote Sensing. Marzo 24 de 1997. Pág. 149
– 159.
BLASCO San José, GARCIA León José Juan de, CUARTERO SAÉNZ Josefa,
LOCALIZACION Aurora, “La docencia de fotogrametría en ingeniería en geodesia
y cartografía”
[EnLínea], [http://www.dialnet.unirioja.es/servlet/oalart?codigo=166362]. Revista ISSN 1131-9100 [Consultado marzo 22 2010].
Physical Modelling in Geotechnics – 6 th ICPMG ´06 – Ng, Zhang & Wang (eds)
2006 Taylor & Francis Group, London, ISBN 0-415-41586-1. Physical test using
close range photogrammetry and numerical analysis fr deep wall – soil – tunnel
interaction.
SELLES GARCIA. David, PORTA CALVET. Jaume, SOLÉ CASTELLS. Georgia,
“Fotogrametría digital con cámaras no métricas”.
[EnLínea],[http://www.isprs.org/publications/related/semana_geomatica05/front/abs
tracts/dimecres9/f17.pdf]. [Consultado junio 23 2010].
STOJAKPVIAE, VESNA, Terrestrial Photogrammetry and application to modelling
architectural objects, Universidad de Novi Sad, Serbia, Series; Architecture and
civil Engineering, Vol 6 Nª 1 2008 pp 113 – 125
75

RIEKE, ZAPP D, WEGMANN, H, NEARING, M & SANTEL, F. Digital
Photogrammetry for measuring soil surface roughness In: Proceeding of the year
2001 annual conference of American Society of Photogrammetry and remote
sensing ASPRS April 23 – 27 2001, St Louis.
TORRES PRADA Adolfo Camilo, NIETO CASTAÑEDA Fernando Alberto; Safe
tunnelling for the city and for the environment: proceedings ITA-AITES world tunnel
congress 2009, Budapest, Hungary, May 23-28, 2009.Study of Settlements
Induced by TBM in Soft Grounds in Bogotá – Colombia.
MARÍN RIVEROS Natalia Eugenia; Evaluación de parámetros elásticos de
mezclas artificiales de suelos para modelos del laboratorio GeoLab, 2008,
Universidad de La Salle, Facultad de Ingeniería Civil, Bogotá.
76

77

78

A B C D E F G H I J K L M N O P Q R S T U
1
2
3
4
5
6
7
98
10
11
13
1415
16
17
12
18
TESTIG O S INSTALADO S ENEL FRENTE DEL M O DELO
79

80

81

82

E N T R A D A
S A L ID A
A
B
C
D
E
F
G
H
I
J
K
4 3 2 1
S E N S O R E S
S O P O R T E S E N S O R E S
M A L L A D E R E F E R E N C I A
M A L L A C E N T R A L T U N E L
P U N T O S D E C O N T R O L
1 0 0
1 0 0 .4 0
1 0 0 .8 0
1 0 1 .1 9
1 0 1 .6 0
1 0 2 .0 0
1 0 0 1 0 0 1 0 0
1 0 0 .3 9 1 0 0 .4 1 1 0 0 .4 0
1 0 0 .8 0 1 0 0 .8 1 1 0 0 .8 0
1 0 1 .1 8 1 0 1 .2 1 1 0 1 .2 0
1 0 1 .5 9 1 0 1 .6 1 1 0 1 .6 0
1 0 1 .9 9 1 0 2 .0 1 1 0 2 .0 0
S E N S O R E S Y P U N T O S D E C O N T R O L
83

84

85

86

87

88

89

90

91

92

N° PUNTO N° PUNTO Vx Vy Vx^ 2 Vy^ 2X1 10,100 X2 10,1018920 0,001892000 0,00000358Y1 20,200 Y2 20,2000110 0,000011000 0,000000000121X1 10,100 X2 10,0984080 0,001592000 0,000002534Y1 20,400 Y2 20,3983900 0,001610000 0,000002592X1 10,100 X2 10,0982080 0,001792000 0,000003211Y1 20,600 Y2 20,5997390 0,000261000 0,000000068X1 10,100 X2 10,0996360 0,000364000 0,000000132Y1 20,800 Y2 20,8010890 0,001089000 0,000001186X1 10,300 X2 10,3038700 0,003870000 0,000014977Y1 20,200 Y2 20,1966980 0,003302000 0,000010903X1 10,300 X2 10,3019850 0,001985000 0,000003940Y1 20,400 Y2 20,3967620 0,003238000 0,000010485X1 10,300 X2 10,3015570 0,001557000 0,000002424Y1 20,600 Y2 20,5976260 0,002374000 0,000005636X1 10,300 X2 10,3018710 0,001871000 0,000003501Y1 20,800 Y2 20,8010890 0,001089000 0,000001186X1 10,500 X2 10,5021060 0,002106000 0,000004435Y1 20,200 Y2 20,1955270 0,004473000 0,000020008X1 10,500 X2 10,5014210 0,001421000 0,000002019Y1 20,400 Y2 20,3961620 0,003838000 0,000014730X1 10,500 X2 10,5018210 0,001821000 0,000003316Y1 20,600 Y2 20,5988250 0,001175000 0,000001381X1 10,500 X2 10,5017060 0,001706000 0,000002910Y1 20,800 Y2 20,8011740 0,001174000 0,000001378X1 10,700 X2 10,7027700 0,002770000 0,000007673Y1 20,200 Y2 20,1971260 0,002874000 0,000008260X1 10,700 X2 10,7033990 0,003399000 0,000011553Y1 20,400 Y2 20,3968760 0,003124000 0,000009759X1 10,700 X2 10,7030560 0,003056000 0,000009339Y1 20,600 Y2 20,5988540 0,001146000 0,000001313X1 10,700 X2 10,7032840 0,003284000 0,000010785Y1 20,800 Y2 20,8012890 0,001289000 0,000001662
6
2 2
3 3
TABLA Nº 2 DATOS TABLERO DE PRUEBA FOTO DSC07537 (PUNTOS EXACTOS - PUNTOS LEIDOS)
PUNTOS EXACTOS PUNTOS LEIDOS
4 4
6
7 7
8 8
15 15
10
11 11
10
13 13
14 14
21 21
16 16
17 17
19 19
20 20
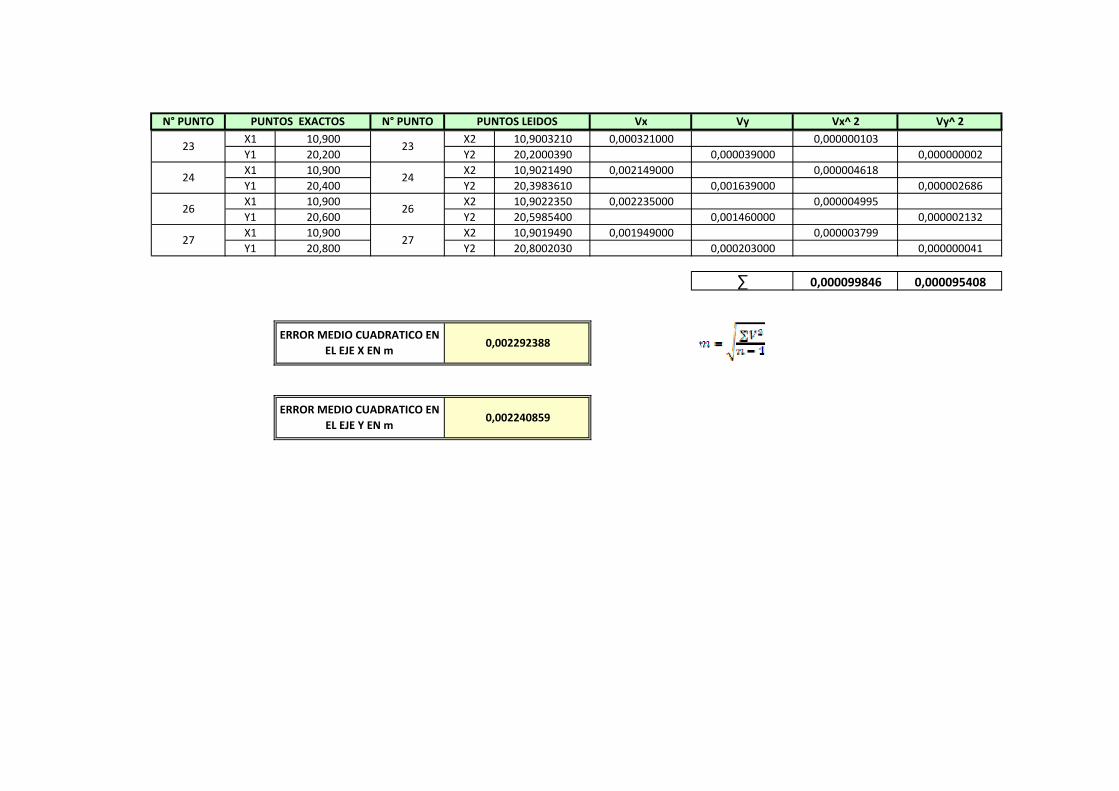
N° PUNTO N° PUNTO Vx Vy Vx^ 2 Vy^ 2PUNTOS EXACTOS PUNTOS LEIDOS
X1 10,900 X2 10,9003210 0,000321000 0,000000103Y1 20,200 Y2 20,2000390 0,000039000 0,000000002X1 10,900 X2 10,9021490 0,002149000 0,000004618Y1 20,400 Y2 20,3983610 0,001639000 0,000002686X1 10,900 X2 10,9022350 0,002235000 0,000004995Y1 20,600 Y2 20,5985400 0,001460000 0,000002132X1 10,900 X2 10,9019490 0,001949000 0,000003799Y1 20,800 Y2 20,8002030 0,000203000 0,000000041
∑ 0,000099846 0,000095408
ERROR MEDIO CUADRATICO EN EL EJE X EN m
ERROR MEDIO CUADRATICO EN EL EJE Y EN m
0,002292388
0,002240859
23 23
27 27
24 24
26 26

N° PUNTO N° PUNTO Vx Vy Vx^ 2 Vy^ 2X1 10,200 X2 10,198 2,00000E‐03 4,00000E‐06Y1 20,800 Y2 20,802 ‐0,002 4E‐06X1 10,300 X2 10,301 ‐1,00000E‐03 1,00000E‐06Y1 20,800 Y2 20,802 ‐0,002 4E‐06X1 10,400 X2 10,401 ‐1,00000E‐03 1,00000E‐06Y1 20,500 Y2 20,497 0,003 9E‐06X1 10,800 X2 10,803 ‐3,00000E‐03 9,00000E‐06Y1 20,800 Y2 20,801 ‐0,001 1E‐06X1 10,100 X2 10,097 3,00000E‐03 9,00000E‐06Y1 20,400 Y2 20,399 0,001 1E‐06X1 10,400 X2 10,401 ‐1,00000E‐03 1,00000E‐06Y1 20,300 Y2 20,296 0,004 1,6E‐05X1 10,700 X2 10,703 ‐3,00000E‐03 9,00000E‐06Y1 20,500 Y2 20,497 0,003 9E‐06X1 10,900 X2 10,901 ‐1,00000E‐03 1,00000E‐06Y1 20,300 Y2 20,300 0,000 0X1 10,200 X2 10,200 0,00000E+00 0,00000E+00Y1 20,200 Y2 20,198 0,002 4E‐06X1 10,700 X2 10,702 ‐2,00000E‐03 4,00000E‐06Y1 20,300 Y2 20,297 0,003 9E‐06X1 10,500 X2 10,501 ‐1,00000E‐03 1,00000E‐06Y1 20,600 Y2 20,599 0,001 1E‐06
∑ 4,00000E‐05 0,000058000
11 11
9 9
10
TABLA Nº 3 DATOS TABLERO DE PRUEBA FOTO DSC07537 (PUNTOS EXACTOS - PUNTOS CONTROL)
ERROR MEDIO CUADRATICO EN EL EJE X EN m
ERROR MEDIO CUADRATICO EN ELE EJE Y EN m
6 6
0,002
0,002408319
7 7
8
2 2
10
3 3
4 4
5 5
8
PUNTOS EXACTOS PUNTOS CONTROL
1 1

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTO
X1 99,849 X2 99,850 0,001399000 1,9572E‐06 0,0066Y1 1,866 Y2 1,860 0,006400000 4,096E‐05X1 99,941 X2 99,946 0,001399000 1,9572E‐06 0,0078Y1 1,867 Y2 1,860 0,007700000 5,929E‐05X1 99,844 X2 99,849 0,001399000 1,9572E‐06 0,0090Y1 1,817 Y2 1,808 0,008900000 7,921E‐05X1 99,940 X2 99,946 0,001399000 1,9572E‐06 0,0093Y1 1,817 Y2 1,807 0,009200001 8,464E‐05X1 100,131 X2 100,138 0,001399000 1,9572E‐06 0,0159Y1 1,870 Y2 1,854 0,015799999 0,00024964X1 100,139 X2 100,141 0,001399000 1,9572E‐06 0,0151Y1 1,817 Y2 1,802 0,015000001 0,000225X1 100,231 X2 100,236 0,001399000 1,9572E‐06 0,0166Y1 1,869 Y2 1,853 0,016500000 0,00027225X1 100,234 X2 100,236 0,001399000 1,9572E‐06 0,0193Y1 1,817 Y2 1,798 0,019199999 0,00036864X1 100,329 X2 100,321 0,001399000 1,9572E‐06 0,0293Y1 1,816 Y2 1,787 0,029300001 0,00085849X1 100,136 X2 100,138 0,001399000 1,9572E‐06 0,0129Y1 1,767 Y2 1,754 0,012800001 0,00016384X1 100,137 X2 100,136 0,001399000 1,9572E‐06 0,0142Y1 1,715 Y2 1,701 0,014100000 0,00019881X1 100,230 X2 100,231 0,001399000 1,9572E‐06 0,0119Y1 1,712 Y2 1,700 0,011799999 0,00013924X1 100,327 X2 100,318 0,001399000 1,9572E‐06 0,0175Y1 1,767 Y2 1,750 0,017400000 0,00030276X1 100,618 X2 100,608 0,001399000 1,9572E‐06 0,0181Y1 1,866 Y2 1,849 0,017999999 0,000324X1 100,713 X2 100,707 0,001399000 1,9572E‐06 0,0143Y1 1,869 Y2 1,855 0,014200000 0,00020164
TABLA Nº 5 DESPLAZAMIENTOS PARCIALES DE LOS PUNTOS DE INSTRUMENTACIÓN ESTADO INICIAL FOTO 10103 Y ESTADO INTERMEDIO FOTO 10371
6 2
5 1
PUNTOS INSTRUMENTACION PUNTOS _ 10371
1 5
2 4
3 6
4 7
7 35
8 36
14 37
10 38
12 3
13 34
20 41
15 39
21 43

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOPUNTOS INSTRUMENTACION PUNTOS _ 10371
X1 100,619 X2 100,612 0,001399000 1,9572E‐06 0,0190Y1 1,817 Y2 1,798 0,018900000 0,00035721X1 100,715 X2 100,709 0,001399000 1,9572E‐06 0,0114Y1 1,818 Y2 1,806 0,011300001 0,00012769X1 100,719 X2 100,711 0,001399000 1,9572E‐06 0,0119Y1 1,764 Y2 1,753 0,011800000 0,00013924X1 100,716 X2 100,709 0,001399000 1,9572E‐06 0,0142Y1 1,716 Y2 1,702 0,014100000 0,00019881X1 100,715 X2 100,709 0,001399000 1,9572E‐06 0,0112Y1 1,664 Y2 1,653 0,011100000 0,00012321X1 100,621 X2 100,611 0,001399000 1,9572E‐06 0,0237Y1 1,662 Y2 1,638 0,023700001 0,00056169X1 100,134 X2 100,134 0,001399000 1,9572E‐06 0,0150Y1 1,617 Y2 1,602 0,014900001 0,00022201X1 100,714 X2 100,713 0,001399000 1,9572E‐06 0,0114Y1 1,619 Y2 1,607 0,011299999 0,00012769X1 100,501 X2 100,503 0,001399000 1,9572E‐06 0,0072Y1 1,522 Y2 1,529 0,007100001 5,041E‐05X1 100,139 X2 100,134 0,001399000 1,9572E‐06 0,0097Y1 1,509 Y2 1,499 0,009600000 9,216E‐05X1 100,119 X2 100,133 0,001399000 1,9572E‐06 0,0117Y1 1,474 Y2 1,462 0,011600001 0,00013456X1 100,131 X2 100,135 0,001399000 1,9572E‐06 0,0119Y1 1,565 Y2 1,554 0,011800000 0,00013924X1 100,715 X2 100,716 0,001399000 1,9572E‐06 0,0097Y1 1,313 Y2 1,303 0,009600000 9,216E‐05X1 100,698 X2 100,716 0,001399000 1,9572E‐06 0,0024Y1 1,216 Y2 1,214 0,002000000 4E‐06X1 100,908 X2 100,905 0,001399000 1,9572E‐06 0,0054Y1 1,306 Y2 1,301 0,005199999 2,704E‐05X1 100,901 X2 100,902 0,001399000 1,9572E‐06 0,0096Y1 1,413 Y2 1,404 0,009500001 9,025E‐05X1 100,905 X2 100,900 0,001399000 1,9572E‐06 0,0113Y1 1,478 Y2 1,467 0,011200000 0,00012544X1 100,898 X2 100,892 0,001399000 1,9572E‐06 0,0092Y1 1,668 Y2 1,659 0,009100001 8,281E‐05
23 42
24 44
25 45
31 47
32 49
39 33
33 48
48 65
44 50
61 32
54
3056
31
71 58
66 61
67 60
72 56
73 57
76 70

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOPUNTOS INSTRUMENTACION PUNTOS _ 10371
X1 100,896 X2 100,895 0,001399000 1,9572E‐06 0,0105Y1 1,622 Y2 1,611 0,010400001 0,00010816X1 100,895 X2 100,891 0,001399000 1,9572E‐06 0,0095Y1 1,716 Y2 1,706 0,009400001 8,836E‐05X1 100,893 X2 100,891 0,001399000 1,9572E‐06 0,0092Y1 1,773 Y2 1,764 0,009099999 8,281E‐05X1 100,896 X2 100,891 0,001399000 1,9572E‐06 0,0110Y1 1,822 Y2 1,811 0,010900000 0,00011881X1 100,894 X2 100,888 0,001399000 1,9572E‐06 0,0115Y1 1,871 Y2 1,860 0,011400001 0,00012996X1 99,940 X2 99,945 0,001399000 1,9572E‐06 0,0088Y1 1,763 Y2 1,755 0,008700000 7,569E‐05X1 99,843 X2 99,847 0,001399000 1,9572E‐06 0,0072Y1 1,764 Y2 1,757 0,007100001 5,041E‐05X1 99,845 X2 99,847 0,001399000 1,9572E‐06 0,0086Y1 1,718 Y2 1,709 0,008500000 7,225E‐05X1 99,939 X2 99,944 0,001399000 1,9572E‐06 0,0112Y1 1,718 Y2 1,707 0,011100000 0,00012321X1 99,844 X2 99,847 0,001399000 1,9572E‐06 0,0097Y1 1,666 Y2 1,656 0,009600000 9,216E‐05X1 99,939 X2 99,940 0,001399000 1,9572E‐06 0,0098Y1 1,666 Y2 1,656 0,009700000 9,409E‐05X1 99,937 X2 99,940 0,001399000 1,9572E‐06 0,0104Y1 1,621 Y2 1,611 0,010299999 0,00010609X1 99,840 X2 99,845 0,001399000 1,9572E‐06 0,0090Y1 1,618 Y2 1,610 0,008900000 7,921E‐05X1 99,944 X2 99,942 0,001399000 1,9572E‐06 0,0101Y1 1,569 Y2 1,559 0,010000000 1E‐04X1 99,846 X2 99,846 0,001399000 1,9572E‐06 0,0076Y1 1,571 Y2 1,563 0,007499998 5,625E‐05X1 99,843 X2 99,844 0,001399000 1,9572E‐06 0,0087Y1 1,514 Y2 1,506 0,008600000 7,396E‐05X1 99,941 X2 99,942 0,001399000 1,9572E‐06 0,0072Y1 1,512 Y2 1,504 0,007100001 5,041E‐05X1 99,943 X2 99,937 0,001399000 1,9572E‐06 0,0056Y1 1,472 Y2 1,467 0,005400000 2,916E‐05
77 71
83 8
78 69
79 68
80 67
81 66
82 9
89 14
84 10
85 11
86 12
87 13
88 15
90 17
91 16
92 18
93 19
94 21

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOPUNTOS INSTRUMENTACION PUNTOS _ 10371
X1 99,846 X2 99,845 0,001399000 1,9572E‐06 0,0074Y1 1,475 Y2 1,468 0,007300001 5,329E‐05X1 99,842 X2 99,840 0,001399000 1,9572E‐06 0,0068Y1 1,417 Y2 1,410 0,006700000 4,489E‐05X1 99,936 X2 99,936 0,001399000 1,9572E‐06 0,0111Y1 1,415 Y2 1,404 0,011000000 0,000121X1 99,943 X2 99,940 0,001399000 1,9572E‐06 0,0070Y1 1,301 Y2 1,294 0,006899999 4,761E‐05X1 99,846 X2 99,846 0,001399000 1,9572E‐06 0,0083Y1 1,306 Y2 1,298 0,008199999 6,724E‐05X1 99,824 X2 99,838 0,001399000 1,9572E‐06 0,0164Y1 1,225 Y2 1,209 0,016300000 0,00026569X1 99,923 X2 99,935 0,001399000 1,9572E‐06 0,0174Y1 1,224 Y2 1,206 0,017300000 0,00029929X1 100,889 X2 100,899 0,001399000 1,9572E‐06 0,0054Y1 1,221 Y2 1,216 0,005200000 2,704E‐05X1 100,987 X2 0,001399000 1,9572E‐06 1,2217Y1 1,222 Y2 1,221700000 1,49255089X1 101,001 X2 100,999 0,001399000 1,9572E‐06 0,0089Y1 1,416 Y2 1,407 0,008800000 7,744E‐05X1 100,996 X2 100,992 0,001399000 1,9572E‐06 0,0077Y1 1,476 Y2 1,469 0,007600000 5,776E‐05X1 101,001 X2 100,997 0,001399000 1,9572E‐06 0,0109Y1 1,518 Y2 1,507 0,010799998 0,00011664X1 100,994 X2 100,990 0,001399000 1,9572E‐06 0,0117Y1 1,574 Y2 1,562 0,011599999 0,00013456X1 100,993 X2 100,990 0,001399000 1,9572E‐06 0,0088Y1 1,620 Y2 1,612 0,008700000 7,569E‐05X1 100,989 X2 100,984 0,001399000 1,9572E‐06 0,0098Y1 1,772 Y2 1,762 0,009700000 9,409E‐05X1 100,989 X2 100,982 0,001399000 1,9572E‐06 0,0104Y1 1,820 Y2 1,810 0,010299999 0,00010609X1 100,987 X2 100,983 0,001399000 1,9572E‐06 0,0097Y1 1,872 Y2 1,862 0,009599999 9,216E‐05
95 20
101 27
96 22
97 23
98 25
99 24
100 26
107 53
102 59
103
105 55
106 54
108 52
109 51
114 74
112 76
113 75

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOSX1 99,850 X2 99,8509 0,0013990 1,9572E‐06 0,00832Y1 1,866 Y2 1,858 0,0082000 6,724E‐05X1 99,941 X2 99,947 0,0052000 2,704E‐05 0,01154Y1 1,867 Y2 1,857 0,0103000 0,00010609X1 99,844 X2 99,848 0,0035000 1,225E‐05 0,01003Y1 1,817 Y2 1,808 0,0094000 8,836E‐05X1 99,940 X2 99,946 0,0055000 3,025E‐05 0,01098Y1 1,817 Y2 1,807 0,0095000 9,025E‐05X1 100,131 X2 100,139 0,0074000 5,476E‐05 0,01891Y1 1,870 Y2 1,853 0,0174000 0,00030276X1 100,139 X2 100,140 0,0017000 2,89E‐06 0,01589Y1 1,817 Y2 1,801 0,0158000 0,00024964X1 100,231 X2 100,239 0,0085000 7,225E‐05 0,01991Y1 1,869 Y2 1,851 0,0180000 0,000324X1 100,234 X2 100,240 0,0058000 3,364E‐05 0,02179Y1 1,817 Y2 1,796 0,0210000 0,000441X1 100,332 X2 100,322 0,0100000 0,0001 0,09224Y1 1,867 Y2 1,775 0,0917000 0,00840889X1 100,329 X2 100,320 0,0090000 8,1E‐05 0,07673Y1 1,816 Y2 1,740 0,0762000 0,00580644X1 100,136 X2 100,139 0,0029000 8,41E‐06 0,01440Y1 1,767 Y2 1,753 0,0141000 0,00019881X1 100,137 X2 100,137 0,0009000 8,1E‐07 0,01343Y1 1,715 Y2 1,702 0,0134000 0,00017956X1 100,230 X2 100,231 0,0018000 3,24E‐06 0,00957Y1 1,712 Y2 1,703 0,0094000 8,836E‐05X1 100,618 X2 100,606 0,0120000 0,000144 0,02453Y1 1,866 Y2 1,845 0,0214000 0,00045796X1 100,713 X2 100,707 0,0060000 3,6E‐05 0,01634Y1 1,869 Y2 1,854 0,0152000 0,00023104
TABLA Nº 6 DESPLAZAMIENTOS FINALES DE LOS PUNTOS DE INSTRUMENTACIÓN Y PUNTOS FOTO 10499
21 66
20 65
4
7
16
14 28
6
9
10
12 5
11
1
2
3
PUNTOS _ 10499
8
2
3
4
5
6
9
8
10
7
13
PUNTOS INSTRUMENTACION
1

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOSPUNTOS _ 10499PUNTOS INSTRUMENTACION
X1 100,619 X2 100,610 0,0090000 8,1E‐05 0,02488Y1 1,817 Y2 1,794 0,0232000 0,00053824X1 100,715 X2 100,710 0,0051000 2,601E‐05 0,01396Y1 1,818 Y2 1,805 0,0130000 0,000169X1 100,719 X2 100,712 0,0068000 4,624E‐05 0,01423Y1 1,764 Y2 1,752 0,0125000 0,00015625X1 100,622 X2 100,603 0,0195000 0,00038025 0,03218Y1 1,763 Y2 1,737 0,0256000 0,00065536X1 100,621 X2 100,607 0,0139000 0,00019321 0,02843Y1 1,716 Y2 1,691 0,0248000 0,00061504X1 100,716 X2 100,713 0,0023000 5,29E‐06 0,01399Y1 1,716 Y2 1,703 0,0138000 0,00019044X1 100,715 X2 100,712 0,0037000 1,369E‐05 0,01256Y1 1,664 Y2 1,652 0,0120000 0,000144X1 100,134 X2 100,133 0,0013000 1,69E‐06 0,01476Y1 1,617 Y2 1,602 0,0147000 0,00021609X1 100,714 X2 100,713 0,0005000 2,5E‐07 0,01251Y1 1,619 Y2 1,606 0,0125000 0,00015625X1 100,601 X2 100,609 0,0084000 7,056E‐05 0,01416Y1 1,579 Y2 1,590 0,0114000 0,00012996X1 100,501 X2 100,504 0,0031000 9,61E‐06 0,00398Y1 1,522 Y2 1,520 0,0025000 6,25E‐06X1 100,715 X2 100,716 0,0008000 6,4E‐07 0,00874Y1 1,313 Y2 1,304 0,0087000 7,569E‐05X1 100,698 X2 100,719 0,0210000 0,000441 0,02159Y1 1,216 Y2 1,211 0,0050000 2,5E‐05X1 100,908 X2 100,906 0,0023000 5,29E‐06 0,00514Y1 1,306 Y2 1,302 0,0046000 2,116E‐05X1 100,901 X2 100,904 0,0034000 1,156E‐05 0,01018Y1 1,413 Y2 1,404 0,0096000 9,216E‐05X1 100,905 X2 100,902 0,0021000 4,41E‐06 0,00856Y1 1,478 Y2 1,470 0,0083000 6,889E‐05X1 100,896 X2 100,898 0,0018000 3,24E‐06 0,01085Y1 1,622 Y2 1,611 0,0107000 0,00011449X1 100,895 X2 100,895 0,0002000 4E‐08 0,01070Y1 1,716 Y2 1,705 0,0107000 0,00011449
73 43
77 48
78 56
72 41
71 40
67 38
66 39
44 45
48 64
45 47
30 61
39 17
32 46
31 62
26 60
25 57
24 58
23 59

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOSPUNTOS _ 10499PUNTOS INSTRUMENTACION
X1 100,893 X2 100,892 0,0009000 8,1E‐07 0,01124Y1 1,773 Y2 1,762 0,0112000 0,00012544X1 100,896 X2 100,891 0,0050000 2,5E‐05 0,01272Y1 1,822 Y2 1,810 0,0117000 0,00013689X1 100,894 X2 100,890 0,0039000 1,521E‐05 0,01092Y1 1,871 Y2 1,861 0,0102000 0,00010404X1 99,940 X2 99,940 0,0006000 3,6E‐07 0,00972Y1 1,763 Y2 1,754 0,0097000 9,409E‐05X1 99,843 X2 99,846 0,0029000 8,41E‐06 0,01051Y1 1,764 Y2 1,754 0,0101000 0,00010201X1 99,845 X2 99,845 0,0003000 9E‐08 0,00831Y1 1,718 Y2 1,710 0,0083000 6,889E‐05X1 99,939 X2 99,941 0,0027000 7,29E‐06 0,01230Y1 1,718 Y2 1,706 0,0120000 0,000144X1 99,844 X2 99,844 0,0001000 1E‐08 0,00840Y1 1,666 Y2 1,657 0,0084000 7,056E‐05X1 99,939 X2 99,940 0,0005000 2,5E‐07 0,00931Y1 1,666 Y2 1,656 0,0093000 8,649E‐05X1 99,937 X2 99,939 0,0021000 4,41E‐06 0,00885Y1 1,621 Y2 1,612 0,0086000 7,396E‐05X1 99,840 X2 99,842 0,0024000 5,76E‐06 0,00816Y1 1,618 Y2 1,611 0,0078000 6,084E‐05X1 99,944 X2 99,942 0,0023000 5,29E‐06 0,00968Y1 1,569 Y2 1,560 0,0094000 8,836E‐05X1 99,846 X2 99,845 0,0010000 1E‐06 0,00717Y1 1,571 Y2 1,564 0,0071000 5,041E‐05X1 99,843 X2 99,843 0,0001000 1E‐08 0,01010Y1 1,514 Y2 1,504 0,0101000 0,00010201X1 99,941 X2 99,939 0,0022000 4,84E‐06 0,00630Y1 1,512 Y2 1,506 0,0059000 3,481E‐05X1 99,943 X2 99,938 0,0051000 2,601E‐05 0,00983Y1 1,472 Y2 1,464 0,0084000 7,056E‐05X1 99,846 X2 99,844 0,0019000 3,61E‐06 0,01077Y1 1,475 Y2 1,465 0,0106000 0,00011236X1 99,842 X2 99,841 0,0011000 1,21E‐06 0,00669Y1 1,417 Y2 1,410 0,0066000 4,356E‐05
89 20
96 34
95 25
94 27
84 14
93 26
92 24
91 23
90 22
88 21
87 18
86 19
85 15
83 12
82 13
81 67
80 54
79 55

N° PUNTO N° PUNTO (X2 ‐ X1) (Y2 ‐ Y1) (X2 ‐ X1)2 (Y2 ‐ Y1)2 DESPLAZAMIENTOSPUNTOS _ 10499PUNTOS INSTRUMENTACION
X1 99,936 X2 99,937 0,0018000 3,24E‐06 0,01174Y1 1,415 Y2 1,404 0,0116000 0,00013456X1 99,943 X2 99,939 0,0039000 1,521E‐05 0,00732Y1 1,301 Y2 1,295 0,0062000 3,844E‐05X1 99,846 X2 99,845 0,0011000 1,21E‐06 0,00798Y1 1,306 Y2 1,298 0,0079000 6,241E‐05X1 99,824 X2 99,839 0,0146000 0,00021316 0,02108Y1 1,225 Y2 1,210 0,0152000 0,00023104X1 99,923 X2 99,934 0,0111000 0,00012321 0,01915Y1 1,224 Y2 1,208 0,0156000 0,00024336X1 101,001 X2 101,001 0,0001000 1E‐08 0,00970Y1 1,416 Y2 1,406 0,0097000 9,409E‐05X1 100,996 X2 100,996 0,0003000 9E‐08 0,00701Y1 1,476 Y2 1,469 0,0070000 4,9E‐05X1 100,993 X2 100,996 0,0034000 1,156E‐05 0,00915Y1 1,620 Y2 1,612 0,0085000 7,225E‐05X1 100,992 X2 100,991 0,0011000 1,21E‐06 0,01305Y1 1,671 Y2 1,658 0,0130000 0,000169X1 100,991 X2 100,989 0,0020000 4E‐06 0,01345Y1 1,719 Y2 1,706 0,0133000 0,00017689X1 100,989 X2 100,988 0,0008000 6,4E‐07 0,01053Y1 1,772 Y2 1,761 0,0105000 0,00011025X1 100,989 X2 100,987 0,0021000 4,41E‐06 0,00973Y1 1,820 Y2 1,811 0,0095000 9,025E‐05X1 100,987 X2 100,986 0,0013000 1,69E‐06 0,00959Y1 1,872 Y2 1,863 0,0095000 9,025E‐05
106 44
105 42
110 50
109 49
112 52
111 51
114 68
113 53
101 37
100 36
99 35
98 32
97 33

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
MATCH-AT statistic file -----------------------
Project : inicio
Date of creation : Sat Feb 13 09:52:47 2010 1. Summary: ------- sigma 0 in micron 5.8
number block points 105 number of images 10
number of iteration 7 redundandancy 388
mean std dev ground x 0.002 [units of terrain system] y 0.002 [units of terrain system] z 0.003 [units of terrain system]
mean std dev ori omega 338.0 [mgrd] phi 340.4 [mgrd] kapp 301.9 [mgrd]
mean std dev ori x 0.002 [units of terrain system] y 0.003 [units of terrain system] z 0.003 [units of terrain system]
rms image points x 3.133 [micron] y 2.191 [micron]
rms control in image x 4.465 [micron] y 4.153 [micron]
rms control in terr x 0.010 [units of terrain system] y 0.008 [units of terrain system] z 0.013 [units of terrain system]
max res. control x -0.029 [units of terrain system] y -0.019 [units of terrain system] z -0.019 [units of terrain system]
rms check points x 0.000 [units of terrain system]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (1 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
y 0.000 [units of terrain system] z 0.000 [units of terrain system]
max res. check x 0.000 [units of terrain system] y 0.000 [units of terrain system] z 0.000 [units of terrain system]
2. Estimated orientation parameters and standard deviations: --------------------------------------------------------
photo ID omega[grd] phi[grd] kappa[grd] X Y Z std.ome[mgrd] std.phi[mgrd] std.kappa[mgrd] std.X std.Y std.Z
292 -1.892249 4.277217 100.277849 102.204 200.558 300.411 350.543 363.140 341.823 0.003 0.003 0.003 288 -2.045064 0.879226 100.659859 101.388 200.549 300.448 328.349 339.248 288.014 0.002 0.002 0.002 289 -1.914504 1.812212 100.864767 101.613 200.553 300.442 332.976 338.920 296.545 0.002 0.003 0.002 290 -2.045531 2.520562 101.087360 101.794 200.553 300.435 336.177 344.196 302.829 0.003 0.003 0.003 291 -1.951836 3.353373 99.752177 102.018 200.556 300.423 353.857 340.388 323.684 0.003 0.003 0.003 285 -1.613365 -2.113163 98.881156 100.568 200.555 300.442 331.710 333.564 284.684 0.002 0.003 0.002 286 -1.797256 -1.426657 100.310889 100.755 200.547 300.448 331.750 332.278 280.606 0.002 0.002 0.002 287 -2.045341 -0.412637 100.179692 101.002 200.544 300.451 331.561 334.322 280.874 0.002 0.002 0.002 283 -1.605021 -3.728166 100.148008 100.135 200.551 300.425 344.313 343.102 315.933 0.003 0.003 0.003 284 -1.604495 -2.980452 100.535692 100.334 200.554 300.434 338.852 334.896 303.693 0.002 0.003 0.003
3. GNSS observations and resuduals: -------------------------------
photo ID X Y Z res x res y res z
292 102.150 200.560 300.460 0.054! -0.002! -0.049! <- eliminated 288 101.370 200.560 300.460 0.018 -0.011 -0.012 289 101.601 200.560 300.460 0.012 -0.007 -0.018 290 101.780 200.560 300.460 0.014 -0.007 -0.025 291 101.970 200.560 300.460 0.048 -0.004 -0.037 285 100.550 200.560 300.460 0.018 -0.005 -0.018 286 100.770 200.560 300.460 -0.015 -0.013 -0.012 287 100.980 200.560 300.460 0.022 -0.016 -0.009 283 100.160 200.560 300.460 -0.025 -0.009 -0.035 284 100.370 200.560 300.460 -0.036 -0.006 -0.026
4. Adjusted coordinates including control/check points and standandard deviations:
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (2 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
------------------------------------------------------------------------------
point ID x y z sx sy sz code fold check blund given x given y given z res x res y res z
A1 100.029 200.000 299.987 0.003 0.003 0.003 6 2 0 0 100.000 200.000 300.000 -0.029 0.000 0.013 A4 99.994 200.609 299.987 0.003 0.003 0.003 6 2 0 0 100.000 200.590 300.000 0.006 -0.019 0.013 C1 100.396 199.997 300.004 0.002 0.002 0.003 6 4 0 0 100.407 200.000 300.000 0.011 0.003 -0.004 C4 100.393 200.608 300.006 0.002 0.002 0.002 6 4 0 0 100.400 200.613 300.000 0.007 0.005 -0.006 E1 100.811 199.994 300.015 0.002 0.002 0.002 6 3 0 0 100.808 200.000 300.000 -0.003 0.006 -0.015 E4 100.804 200.607 300.017 0.002 0.002 0.002 6 3 0 0 100.801 200.602 300.000 -0.003 -0.005 -0.017 G1 101.201 199.993 300.016 0.002 0.002 0.002 6 4 0 0 101.209 200.000 300.000 0.008 0.007 -0.016 G4 101.197 200.607 300.019 0.002 0.002 0.002 6 4 0 0 101.199 200.599 300.000 0.002 -0.008 -0.019 I1 101.599 199.998 300.009 0.002 0.002 0.003 6 4 0 0 101.609 200.000 300.000 0.010 0.002 -0.009 I4 101.594 200.609 300.010 0.002 0.002 0.002 6 4 0 0 101.601 200.607 300.000 0.007 -0.002 -0.010 K1 102.013 199.998 299.988 0.003 0.003 0.003 6 4 0 0 102.009 200.000 300.000 -0.004 0.002 0.012 K4 102.003 200.612 299.990 0.003 0.003 0.003 6 4 0 0 102.006 200.602 300.000 0.003 -0.010 0.010 20000001 100.062 200.287 299.951 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000002 100.044 200.100 299.948 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000003 100.033 200.015 299.944 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000004 100.025 200.147 299.946 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000005 100.025 200.339 299.948 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000006 100.016 200.257 299.946 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000007 99.992 200.577 299.990 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000008 99.921 200.281 299.939 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000009 99.922 200.719 299.934 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000001 101.610 200.105 300.096 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000003 101.511 200.182 300.002 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000004 101.321 200.181 300.005 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000005 101.273 200.018 299.981 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000006 101.253 200.413 299.985 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000008 101.137 200.198 300.005 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000009 101.134 199.947 300.000 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000010 101.090 200.170 300.005 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000011 101.076 199.953 299.999 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000012 101.049 200.199 300.005 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000013 100.896 200.177 300.007 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000014 100.866 200.433 299.985 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000016 100.846 200.203 300.006 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000017 100.833 200.158 300.006 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000018 100.267 200.365 299.966 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000019 100.146 200.200 299.957 0.002 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000001 101.960 200.082 299.958 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000002 101.959 200.162 299.959 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000003 101.864 200.171 299.985 0.002 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000005 101.712 200.169 299.992 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000006 101.693 200.206 299.994 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (3 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
40000007 101.687 199.963 299.988 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000008 101.625 199.951 299.992 0.002 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000010 101.570 200.195 299.998 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000013 101.396 200.173 300.003 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000014 101.380 200.601 299.979 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000015 101.356 200.137 299.982 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000016 101.231 200.849 299.975 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000018 101.220 200.179 300.007 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000019 101.201 200.211 300.018 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000022 101.166 200.178 300.007 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000023 101.047 200.016 299.982 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000024 101.038 200.895 299.971 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000025 101.032 199.952 300.000 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000026 100.945 200.177 300.006 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000027 100.928 199.955 300.001 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000028 100.826 199.950 300.002 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000029 100.795 200.161 300.004 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000031 100.734 199.936 299.979 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000033 100.708 199.880 299.941 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000034 100.704 199.948 299.998 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000035 100.697 200.554 299.981 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000036 100.682 200.175 300.006 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000037 100.680 201.078 299.957 0.002 0.003 0.004 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000038 100.676 199.972 299.977 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000041 100.538 200.563 299.993 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000042 100.538 200.640 299.992 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000044 100.535 200.401 299.992 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000045 100.531 200.610 299.991 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000046 100.504 200.131 299.975 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000047 100.501 199.942 299.970 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000048 100.495 200.584 299.975 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000049 100.478 200.270 299.976 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000050 100.461 200.160 299.995 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000051 100.461 200.200 299.997 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000053 100.381 199.955 299.967 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000054 102.055 200.489 299.949 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000001 101.824 199.957 299.983 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000002 101.812 200.216 299.967 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000003 101.776 200.610 299.981 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000004 101.773 200.837 299.975 0.003 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000006 101.768 200.427 299.984 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000007 101.769 199.956 299.986 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000008 101.767 200.083 299.983 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000009 101.757 200.030 299.982 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000010 101.752 200.208 299.990 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000011 101.750 200.577 299.983 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (4 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
50000012 101.748 200.678 299.980 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000013 101.747 200.611 299.982 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000014 101.743 200.826 299.977 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000015 101.730 199.984 299.992 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000016 101.655 199.867 299.917 0.002 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000017 101.307 200.142 299.909 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000018 100.670 200.103 299.944 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000019 100.612 200.026 299.977 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000021 100.597 199.982 300.011 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000022 100.588 200.108 299.978 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000024 100.566 200.171 299.999 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000025 100.567 200.611 299.991 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000026 100.565 200.438 299.993 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000027 100.563 200.055 299.990 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000028 100.565 200.511 299.992 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000029 100.558 200.770 299.987 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000030 100.546 200.093 299.990 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
3. Photo observations and residuals: --------------------------------
photo point status fold automa x vx y vy
288 G4 1 4 0 1002.6 -1.7 2501.3 -13.0 289 I1 1 4 0 -6981.7 -11.5 98.7 4.0 286 C1 1 4 0 -6903.4 11.9 4784.5 1.3 287 40000022 1 4 1 -4474.4 2.2 -2040.6 9.4 287 G1 1 4 0 -6850.9 -2.8 -2474.9 -9.1 286 40000024 1 2 1 4407.8 9.0 -3360.2 -0.2 287 40000024 1 2 1 4541.9 -8.9 -414.5 0.1 289 G4 1 4 0 968.9 -2.7 5383.4 8.3 291 40000003 1 3 1 -4721.7 8.1 1634.6 -3.0 290 I4 1 4 0 986.5 5.0 2460.6 -6.9 287 40000034 1 4 1 -7162.2 8.3 3733.0 -0.4 285 C1 1 4 0 -7138.4 -7.4 2301.2 -3.3 286 40000022 1 4 1 -4521.4 -4.0 -5024.0 -7.1 286 G1 1 4 0 -6900.1 6.1 -5499.7 5.2 283 50000027 1 5 1 -5979.5 7.9 -4920.3 0.2 285 E4 1 3 0 907.8 -7.8 -2978.8 0.6 290 40000003 1 3 1 -4649.5 -3.5 -1041.7 7.0 285 40000029 1 4 1 -4825.8 -4.9 -2801.0 5.9 291 I4 1 4 0 865.1 -5.9 5380.1 4.8 288 30000012 1 2 1 -4186.0 -7.6 4253.2 0.0 287 30000012 1 2 1 -4192.2 7.5 -539.2 0.2
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (5 de 13)13/01/2011 20:01:25
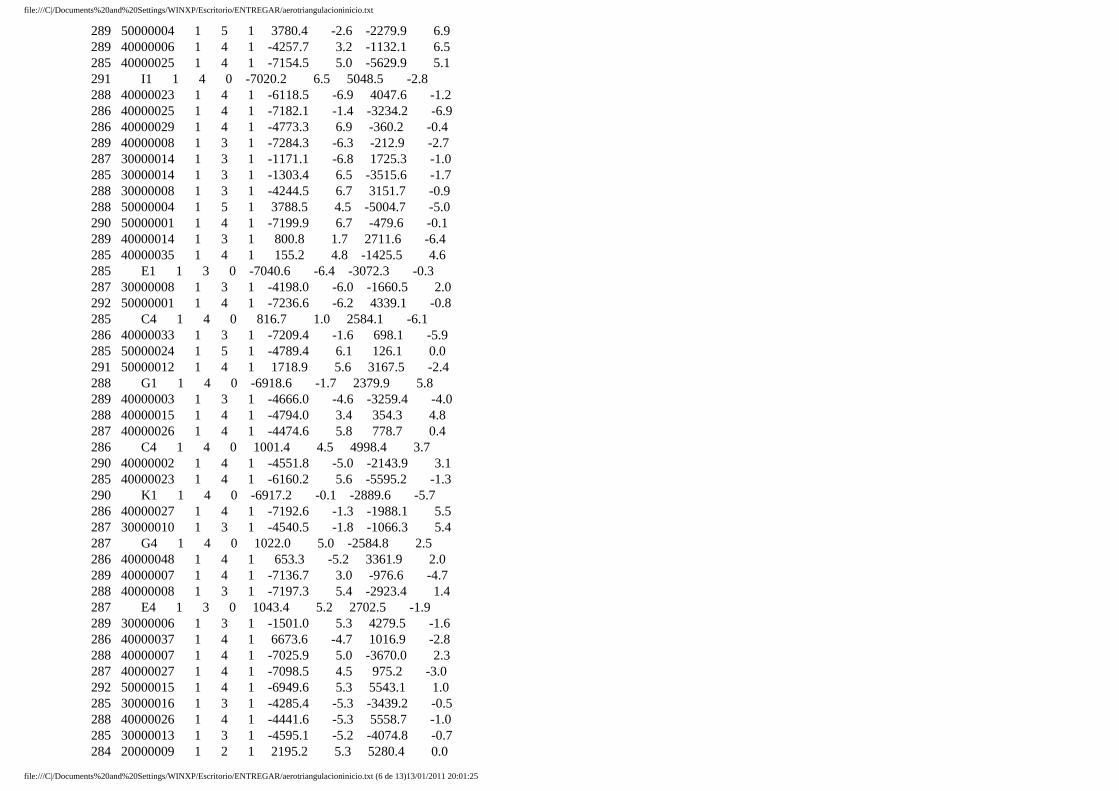
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
289 50000004 1 5 1 3780.4 -2.6 -2279.9 6.9 289 40000006 1 4 1 -4257.7 3.2 -1132.1 6.5 285 40000025 1 4 1 -7154.5 5.0 -5629.9 5.1 291 I1 1 4 0 -7020.2 6.5 5048.5 -2.8 288 40000023 1 4 1 -6118.5 -6.9 4047.6 -1.2 286 40000025 1 4 1 -7182.1 -1.4 -3234.2 -6.9 286 40000029 1 4 1 -4773.3 6.9 -360.2 -0.4 289 40000008 1 3 1 -7284.3 -6.3 -212.9 -2.7 287 30000014 1 3 1 -1171.1 -6.8 1725.3 -1.0 285 30000014 1 3 1 -1303.4 6.5 -3515.6 -1.7 288 30000008 1 3 1 -4244.5 6.7 3151.7 -0.9 288 50000004 1 5 1 3788.5 4.5 -5004.7 -5.0 290 50000001 1 4 1 -7199.9 6.7 -479.6 -0.1 289 40000014 1 3 1 800.8 1.7 2711.6 -6.4 285 40000035 1 4 1 155.2 4.8 -1425.5 4.6 285 E1 1 3 0 -7040.6 -6.4 -3072.3 -0.3 287 30000008 1 3 1 -4198.0 -6.0 -1660.5 2.0 292 50000001 1 4 1 -7236.6 -6.2 4339.1 -0.8 285 C4 1 4 0 816.7 1.0 2584.1 -6.1 286 40000033 1 3 1 -7209.4 -1.6 698.1 -5.9 285 50000024 1 5 1 -4789.4 6.1 126.1 0.0 291 50000012 1 4 1 1718.9 5.6 3167.5 -2.4 288 G1 1 4 0 -6918.6 -1.7 2379.9 5.8 289 40000003 1 3 1 -4666.0 -4.6 -3259.4 -4.0 288 40000015 1 4 1 -4794.0 3.4 354.3 4.8 287 40000026 1 4 1 -4474.6 5.8 778.7 0.4 286 C4 1 4 0 1001.4 4.5 4998.4 3.7 290 40000002 1 4 1 -4551.8 -5.0 -2143.9 3.1 285 40000023 1 4 1 -6160.2 5.6 -5595.2 -1.3 290 K1 1 4 0 -6917.2 -0.1 -2889.6 -5.7 286 40000027 1 4 1 -7192.6 -1.3 -1988.1 5.5 287 30000010 1 3 1 -4540.5 -1.8 -1066.3 5.4 287 G4 1 4 0 1022.0 5.0 -2584.8 2.5 286 40000048 1 4 1 653.3 -5.2 3361.9 2.0 289 40000007 1 4 1 -7136.7 3.0 -976.6 -4.7 288 40000008 1 3 1 -7197.3 5.4 -2923.4 1.4 287 E4 1 3 0 1043.4 5.2 2702.5 -1.9 289 30000006 1 3 1 -1501.0 5.3 4279.5 -1.6 286 40000037 1 4 1 6673.6 -4.7 1016.9 -2.8 288 40000007 1 4 1 -7025.9 5.0 -3670.0 2.3 287 40000027 1 4 1 -7098.5 4.5 975.2 -3.0 292 50000015 1 4 1 -6949.6 5.3 5543.1 1.0 285 30000016 1 3 1 -4285.4 -5.3 -3439.2 -0.5 288 40000026 1 4 1 -4441.6 -5.3 5558.7 -1.0 285 30000013 1 3 1 -4595.1 -5.2 -4074.8 -0.7 284 20000009 1 2 1 2195.2 5.3 5280.4 0.0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (6 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
289 30000003 1 3 1 -4553.8 5.1 1197.0 -1.2 283 20000009 1 2 1 2215.9 -5.2 2957.5 -0.0 285 50000019 1 5 1 -6254.8 3.3 -452.4 -4.1 283 C4 1 4 0 899.2 -4.8 -3125.3 2.0 287 40000015 1 4 1 -4689.3 -4.4 -4174.6 -2.8 285 40000049 1 4 1 -3391.1 5.1 1237.1 -0.8 283 50000024 1 5 1 -4666.2 -4.8 -5088.7 -1.9 291 K1 1 4 0 -6976.0 -2.8 -265.4 4.4 288 50000016 1 2 1 -7052.0 -5.1 -2838.3 -0.1 288 I4 1 4 0 972.9 2.1 -2861.7 4.6 285 40000027 1 4 1 -7201.1 -4.0 -4396.2 -3.0 290 50000009 1 5 1 -6261.0 3.9 341.8 -3.2 289 50000016 1 2 1 -7157.2 5.0 -522.5 0.0 289 40000016 1 3 1 3891.0 5.0 4513.2 -0.6 286 40000034 1 4 1 -7299.4 -4.9 798.3 1.2 287 40000037 1 4 1 6718.9 4.8 3946.2 1.5 285 40000033 1 3 1 -7318.0 3.7 -1491.1 3.4 286 40000046 1 4 1 -4867.2 -4.9 3195.2 -0.1 285 40000046 1 4 1 -5052.6 4.8 877.0 -0.9 286 50000028 1 5 1 -281.8 -3.0 2579.3 -3.8 287 E1 1 3 0 -6862.6 4.7 2511.6 -1.4 286 50000026 1 5 1 -1226.8 3.2 2571.3 -3.7 292 40000001 1 4 1 -5548.0 -4.5 2568.6 1.8 287 40000035 1 4 1 329.6 -4.8 3815.5 0.6 285 50000018 1 3 1 -4943.7 -2.1 -1057.0 4.4 290 K4 1 4 0 938.7 -1.9 -3047.6 4.4 285 40000026 1 4 1 -4552.6 -3.9 -4659.8 -2.9 287 40000029 1 4 1 -4657.9 -4.4 2670.2 -1.8 291 40000006 1 4 1 -4289.3 -4.8 3816.8 -0.4 291 40000002 1 4 1 -4605.9 3.4 390.1 3.4 286 40000026 1 4 1 -4554.5 3.3 -2261.7 3.4 290 40000007 1 4 1 -7080.4 -3.8 1221.5 2.8 289 50000014 1 4 1 3656.5 -4.6 -1888.3 -0.6 287 30000011 1 3 1 -7095.6 -0.3 -845.5 -4.7 289 40000054 1 4 1 -669.1 4.5 -5486.7 -0.2 286 30000017 1 3 1 -4815.3 1.6 -840.0 4.2 285 40000038 1 4 1 -6845.6 3.5 -1221.1 -2.8 284 40000029 1 4 1 -4865.8 2.3 -5501.2 -3.9 289 40000010 1 4 1 -4384.1 4.2 440.3 -1.2 283 50000019 1 5 1 -6123.6 4.1 -5323.1 1.6 287 50000019 1 5 1 -5960.4 -4.2 4690.6 1.2 290 50000007 1 4 1 -7200.2 -3.8 212.4 -2.0 285 40000048 1 4 1 494.4 3.8 1108.3 -2.1 286 40000035 1 4 1 258.0 -2.7 854.0 -3.3 284 A4 1 2 0 930.5 -3.2 4850.0 2.9 283 50000030 1 5 1 -5529.5 -4.2 -4730.7 -0.7
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (7 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
292 40000002 1 4 1 -4622.1 2.7 2600.2 -3.3 290 30000003 1 3 1 -4471.9 -4.2 3454.5 0.8 290 40000006 1 4 1 -4213.3 3.0 1136.9 -3.0 286 40000049 1 4 1 -3208.0 -4.2 3540.8 0.6 286 40000038 1 4 1 -6719.5 -4.1 1115.4 0.8 285 40000051 1 4 1 -4452.2 4.1 1484.3 -0.7 287 30000009 1 3 1 -7157.0 -2.3 -1562.4 -3.5 285 50000026 1 5 1 -1359.0 -3.6 197.4 2.1 290 50000012 1 4 1 1810.6 -3.1 325.6 2.8 290 50000008 1 5 1 -5638.7 -3.1 204.3 2.8 291 40000007 1 4 1 -7161.4 -4.1 3769.2 -0.1 285 50000029 1 4 1 2925.1 -3.5 361.4 2.2 290 40000015 1 4 1 -4717.8 -2.6 5122.7 -3.0 289 40000022 1 4 1 -4506.8 2.3 5550.6 -3.3 291 50000009 1 5 1 -6328.4 -4.0 2899.3 0.4 290 40000005 1 4 1 -4670.5 2.6 895.2 -3.0 289 50000011 1 5 1 466.2 -3.4 -1925.4 2.1 285 30000019 1 3 1 -4234.5 -3.7 5217.1 1.5 287 30000013 1 3 1 -4491.0 3.9 1397.3 -0.7 287 50000024 1 5 1 -4490.5 -3.8 5534.3 -1.1 292 50000011 1 5 1 430.8 3.2 5379.0 2.2 283 50000029 1 4 1 2907.8 3.0 -5047.0 -2.5 291 50000002 1 5 1 -3971.8 0.1 2200.8 -3.8 290 I1 1 4 0 -6927.9 3.7 2398.7 1.1 283 40000051 1 4 1 -4336.8 -2.8 -3809.2 2.6 285 30000017 1 3 1 -4860.5 -2.9 -3271.9 -2.4 286 50000019 1 5 1 -6106.7 -3.4 1880.7 1.6 284 50000024 1 5 1 -4777.3 3.3 -2660.1 1.8 288 40000019 1 3 1 -4218.3 3.7 2417.6 0.7 283 A4 1 2 0 934.0 1.8 2257.8 -3.3 288 40000014 1 3 1 839.0 -2.4 -1.2 2.9 290 40000014 1 3 1 858.1 0.7 4862.4 3.6 288 I1 1 4 0 -6903.5 1.7 -2716.7 -3.3 284 A1 1 2 0 -7018.2 3.5 4287.5 1.1 289 K4 1 4 0 890.1 1.1 -5338.8 -3.5 290 50000011 1 5 1 510.5 0.2 332.9 -3.7 286 50000021 1 3 1 -7127.1 3.2 2208.4 -1.7 290 50000014 1 4 1 3713.2 3.5 358.7 1.1 288 50000008 1 5 1 -5560.4 -0.3 -4657.2 -3.6 283 A1 1 2 0 -7020.7 -3.5 1740.3 1.0 289 40000015 1 4 1 -4818.3 3.5 3009.1 0.9 287 30000006 1 3 1 -1429.1 -3.5 -3042.0 -1.0 286 50000018 1 3 1 -4841.8 1.8 1116.2 -3.1 291 50000006 1 5 1 -1481.2 3.5 2880.5 -0.6 284 30000019 1 3 1 -4151.1 1.5 2596.6 -3.3 284 40000051 1 4 1 -4420.0 0.7 -1329.8 -3.5
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (8 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
289 40000002 1 4 1 -4559.4 -1.2 -4245.8 -3.3 287 40000033 1 3 1 -7070.8 -2.2 3280.4 2.7 288 40000006 1 4 1 -4169.5 -1.4 -3876.7 -3.2 286 50000027 1 5 1 -5934.7 -2.9 2545.0 -1.9 289 40000001 1 4 1 -5485.3 3.2 -4220.0 1.4 290 30000001 1 2 1 -6994.3 3.4 2863.7 -0.1 286 30000016 1 3 1 -4250.1 3.3 -1014.9 0.8 289 30000001 1 2 1 -7064.9 -3.4 -25.0 0.0 292 K1 1 4 0 -7019.6 3.4 2099.5 -0.2 286 30000010 1 3 1 -4604.8 -0.6 -4062.1 -3.4 287 40000025 1 4 1 -7103.0 -3.3 -305.3 0.9 289 I4 1 4 0 937.6 -1.5 77.5 -3.1 286 30000011 1 3 1 -7161.6 -1.9 -3780.7 2.8 284 C1 1 4 0 -7100.9 -3.3 -484.0 0.6 291 50000008 1 5 1 -5718.7 3.3 2797.9 0.1 284 40000035 1 4 1 99.7 2.7 -4223.7 -1.9 288 40000016 1 3 1 3958.2 -3.1 1836.7 1.0 289 40000005 1 4 1 -4709.5 0.2 -1363.4 3.3 287 50000028 1 5 1 -215.4 2.5 5587.1 2.0 292 50000002 1 5 1 -3953.3 -2.0 4382.7 2.5 288 30000010 1 3 1 -4565.4 2.4 3735.0 -2.2 291 K4 1 4 0 934.2 -3.0 -100.2 -1.2 288 50000009 1 5 1 -6173.0 0.8 -4511.3 3.1 287 40000023 1 4 1 -6122.3 1.8 -479.0 2.6 291 40000001 1 4 1 -5536.8 2.3 376.6 -2.2 286 50000029 1 4 1 3055.1 1.9 2656.0 -2.4 288 30000006 1 3 1 -1475.7 -1.8 1595.7 2.4 285 50000021 1 3 1 -7286.8 -0.7 -320.2 2.9 286 40000019 1 3 1 -4209.0 -3.0 -5612.3 -0.3 286 50000030 1 5 1 -5489.0 0.6 2762.8 -2.9 292 K4 1 4 0 907.1 2.9 2303.1 -0.0 289 50000006 1 5 1 -1443.1 -1.9 -2114.4 2.2 284 50000029 1 4 1 2896.1 -1.4 -2646.3 2.6 291 50000001 1 4 1 -7264.2 -2.6 2073.8 1.2 289 50000008 1 5 1 -5673.3 -0.4 -1999.0 2.9 284 50000021 1 3 1 -7266.6 -2.6 -3068.3 -1.3 291 50000015 1 4 1 -6996.7 -1.7 3286.3 -2.3 288 30000011 1 3 1 -7113.3 2.2 3830.5 1.8 286 40000031 1 3 1 -7142.8 -2.3 417.3 1.6 286 30000014 1 3 1 -1255.1 0.3 -1242.7 2.8 286 E1 1 3 0 -6985.7 2.3 -556.3 1.7 289 50000007 1 4 1 -7238.9 2.7 -1996.1 0.6 283 30000019 1 3 1 -4133.7 2.1 218.4 1.8 286 30000009 1 3 1 -7216.1 1.8 -4483.0 2.2 284 40000046 1 4 1 -5026.5 -0.4 -1768.4 2.7 291 40000054 1 4 1 -639.6 -2.1 -762.0 1.8
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (9 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
287 50000027 1 5 1 -5781.2 -2.3 5427.1 1.4 286 40000051 1 4 1 -4250.7 -2.1 3904.6 1.7 288 40000013 1 3 1 -4593.8 2.7 -141.1 -0.2 287 50000030 1 5 1 -5342.0 2.4 5648.7 1.1 289 50000002 1 5 1 -3937.0 2.0 -2521.1 1.8 286 E4 1 3 0 970.2 2.2 -541.1 1.5 286 G4 1 4 0 928.0 -1.2 -5742.5 2.3 291 50000007 1 4 1 -7280.2 -0.6 2762.9 2.5 292 50000012 1 4 1 1719.8 -2.4 5404.1 0.8 286 40000044 1 2 1 -1688.5 -2.5 2951.6 0.1 285 40000044 1 2 1 -1844.2 2.5 581.0 -0.1 285 40000034 1 4 1 -7414.8 -1.8 -1647.1 -1.7 289 G1 1 4 0 -6904.5 -1.1 5184.3 -2.2 284 30000018 1 3 1 -2184.5 2.4 1117.5 0.5 292 40000054 1 4 1 -667.0 -2.2 1442.3 -1.1 287 30000017 1 3 1 -4715.7 1.4 2209.1 -1.9 290 50000015 1 4 1 -6917.6 -1.6 696.1 1.7 289 30000004 1 3 1 -4503.2 2.4 3604.6 0.2 284 20000007 1 2 1 508.0 -2.4 4911.8 -0.0 283 20000007 1 2 1 510.1 2.4 2297.6 0.0 291 40000005 1 4 1 -4746.3 -2.2 3557.6 0.8 292 50000008 1 5 1 -5679.9 0.4 5039.8 -2.3 285 40000031 1 3 1 -7243.2 2.1 -1927.4 -0.9 284 50000028 1 5 1 -431.3 -2.3 -2687.1 0.3 284 50000025 1 3 1 843.8 -1.7 -2731.5 -1.4 290 40000010 1 4 1 -4314.9 -2.2 2696.5 0.2 286 40000053 1 3 1 -6830.5 -2.2 4595.8 0.5 292 50000004 1 5 1 3742.4 -1.2 5092.2 -1.8 289 50000001 1 4 1 -7215.6 2.1 -2677.8 -0.2 292 50000006 1 5 1 -1462.2 -2.1 5136.0 0.5 284 40000053 1 3 1 -7037.8 1.7 -240.8 -1.2 287 30000016 1 3 1 -4155.2 2.0 2036.3 -0.5 292 50000007 1 4 1 -7240.3 1.7 5018.1 -1.1 285 50000028 1 5 1 -422.8 1.3 220.9 1.5 289 50000015 1 4 1 -6957.5 -1.9 -1532.0 -0.6 289 50000009 1 5 1 -6290.7 -0.2 -1852.4 -2.0 284 20000005 1 2 1 -2432.3 -2.0 4055.9 -0.0 283 20000005 1 2 1 -2435.4 2.0 1697.5 0.0 286 40000050 1 2 1 -4729.5 -2.0 3888.0 0.1 284 40000050 1 2 1 -4902.8 1.9 -1320.3 -0.0 289 K1 1 4 0 -6897.1 -0.6 -5126.4 1.8 284 40000048 1 4 1 504.1 1.3 -1748.9 -1.4 292 50000009 1 5 1 -6290.4 -0.6 5127.2 1.8 290 50000006 1 5 1 -1407.0 1.5 132.4 -1.2 287 40000016 1 3 1 3964.1 -1.8 -2811.6 -0.4 288 40000010 1 4 1 -4315.1 -1.7 -2345.5 0.7
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (10 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
285 40000037 1 4 1 6544.3 1.5 -1066.4 1.1 286 30000013 1 3 1 -4577.6 1.4 -1653.4 1.2 284 50000027 1 5 1 -6084.1 -1.6 -2539.2 0.9 290 40000008 1 3 1 -7228.4 1.0 1991.2 1.5 285 50000030 1 5 1 -5657.3 1.1 358.4 1.4 283 40000049 1 4 1 -3292.1 -1.8 -3841.5 -0.1 289 40000013 1 3 1 -4621.4 -1.7 2646.8 0.6 291 50000011 1 5 1 430.0 1.3 3134.7 -1.1 284 40000038 1 4 1 -6837.6 0.7 -3751.0 1.6 288 50000003 1 5 1 918.0 1.7 -4997.1 0.0 283 40000046 1 4 1 -4938.7 0.5 -4101.2 -1.7 289 40000018 1 3 1 -4508.3 -1.6 4873.0 -0.5 284 40000037 1 4 1 6443.9 -1.6 -3976.9 0.5 284 50000022 1 2 1 -5289.6 -1.6 -2776.1 -0.0 285 50000022 1 2 1 -5300.6 1.6 -154.2 0.0 291 50000004 1 5 1 3766.5 -1.6 2858.3 -0.2 288 40000018 1 3 1 -4512.2 1.4 2099.9 0.8 283 40000048 1 4 1 542.9 0.2 -4114.7 1.6 284 40000034 1 4 1 -7408.4 -1.4 -4267.9 0.7 283 30000018 1 3 1 -2147.8 -1.5 -1274.0 -0.3 286 30000008 1 3 1 -4261.0 -0.7 -4658.5 -1.4 287 50000026 1 5 1 -1141.2 0.7 5567.0 1.4 286 40000042 1 2 1 1384.1 -1.5 2932.1 0.1 285 40000042 1 2 1 1239.5 1.5 597.3 -0.0 291 50000014 1 4 1 3624.5 1.5 3239.3 -0.4 290 50000013 1 3 1 939.6 -1.5 356.2 -0.2 286 50000024 1 5 1 -4626.3 -1.0 2561.3 1.2 283 50000028 1 5 1 -381.3 1.5 -5102.4 0.1 288 30000009 1 3 1 -7198.5 0.6 3119.6 1.4 288 50000011 1 5 1 507.5 -1.4 -4665.8 0.6 283 50000025 1 3 1 880.3 1.2 -5145.2 0.8 290 50000003 1 5 1 929.6 -0.7 -17.8 1.3 287 30000005 1 2 1 -6061.5 1.4 -3155.2 0.0 288 30000005 1 2 1 -6141.5 -1.4 1359.6 0.0 288 50000006 1 5 1 -1380.8 -1.1 -4833.8 -0.9 283 50000018 1 3 1 -4843.5 0.3 -5583.6 -1.4 288 40000025 1 4 1 -7103.2 -0.5 4372.9 1.3 286 40000045 1 2 1 986.9 1.3 3010.2 -0.1 285 40000045 1 2 1 846.0 -1.3 677.4 0.0 287 30000004 1 3 1 -4393.5 -1.3 -3967.6 0.1 284 50000026 1 5 1 -1369.1 -1.0 -2680.1 0.8 288 40000005 1 4 1 -4616.9 -0.6 -4099.2 -1.0 290 40000001 1 4 1 -5482.0 -0.8 -2120.2 -0.9 289 50000003 1 5 1 880.8 -1.0 -2264.1 -0.7 289 50000012 1 4 1 1753.5 -0.0 -1923.1 -1.2 288 30000003 1 3 1 -4494.3 -1.0 -1606.1 0.5
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (11 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
288 30000004 1 3 1 -4482.0 -1.0 818.2 -0.4 290 40000013 1 3 1 -4531.7 -1.0 4873.4 -0.3 292 50000013 1 3 1 855.7 1.1 5414.6 -0.2 285 50000027 1 5 1 -6100.6 -1.0 138.7 -0.2 284 20000004 1 2 1 -4711.3 -1.0 4017.6 -0.0 283 20000004 1 2 1 -4717.9 1.0 1677.5 0.0 288 40000027 1 4 1 -7051.4 1.0 5638.8 0.2 287 40000028 1 2 1 -7191.1 -1.0 2244.8 0.0 283 50000026 1 5 1 -1306.6 0.8 -5095.0 -0.6 289 40000019 1 3 1 -4210.1 -0.8 5263.4 -0.6 290 50000004 1 5 1 3843.9 0.9 -27.7 -0.2 286 40000028 1 2 1 -7317.0 1.0 -722.0 -0.0 284 20000001 1 2 1 -3076.9 -1.0 3600.5 -0.0 288 50000002 1 5 1 -3838.3 -0.9 -5107.6 -0.4 283 20000001 1 2 1 -3073.8 1.0 1237.6 0.0 284 50000030 1 5 1 -5639.7 0.1 -2340.6 1.0 283 40000053 1 3 1 -6960.3 0.4 -2578.4 0.8 285 30000018 1 3 1 -2254.9 -0.9 3860.9 -0.2 287 50000017 1 2 1 -4013.3 -0.9 -3127.6 -0.0 288 50000017 1 2 1 -4081.5 0.9 810.9 -0.0 284 40000049 1 4 1 -3364.7 0.8 -1482.4 0.4 284 20000003 1 2 1 -6216.1 0.8 3898.2 0.0 285 50000025 1 3 1 861.2 0.5 214.1 0.7 283 20000003 1 2 1 -6221.0 -0.8 1577.4 -0.0 284 20000008 1 2 1 -3095.0 -0.8 5259.7 -0.0 286 40000041 1 2 1 387.1 0.8 2930.3 -0.0 285 40000041 1 2 1 245.3 -0.8 576.1 0.0 283 20000008 1 2 1 -3112.9 0.8 2937.6 0.0 288 40000022 1 4 1 -4515.0 -0.4 2791.1 0.6 283 C1 1 4 0 -7015.9 -0.7 -3016.9 0.2 290 50000002 1 5 1 -3908.9 0.8 -374.1 -0.0 286 40000036 1 2 1 -4630.5 -0.7 1096.4 0.0 285 40000036 1 2 1 -4742.4 0.7 -1365.8 -0.0 287 40000031 1 3 1 -7007.3 0.2 3235.6 -0.7 291 50000003 1 5 1 856.6 -0.2 2800.3 -0.7 289 50000010 1 2 1 -4214.0 -0.7 -1865.9 0.0 290 50000010 1 2 1 -4179.8 0.7 383.9 -0.0 287 40000038 1 4 1 -6580.2 -0.0 3922.1 0.6 290 40000054 1 4 1 -639.9 -0.2 -3397.5 -0.6 286 40000023 1 4 1 -6189.9 -0.5 -3314.6 0.3 284 40000047 1 2 1 -7174.7 0.6 -1669.7 0.0 285 40000047 1 2 1 -7200.2 -0.6 859.3 -0.0 291 50000013 1 3 1 856.6 0.4 3170.0 0.4 291 40000010 1 4 1 -4417.5 -0.3 5350.9 0.3 284 50000019 1 5 1 -6242.5 0.3 -3029.6 0.2 287 40000018 1 3 1 -4451.8 0.2 -2717.1 -0.3
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (12 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt
284 20000006 1 2 1 -3415.0 0.3 4144.7 0.0 283 20000006 1 2 1 -3417.2 -0.3 1797.5 -0.0 292 50000014 1 4 1 3603.3 -0.3 5462.2 -0.1 284 C4 1 4 0 863.2 -0.2 -534.6 -0.1 284 20000002 1 2 1 -5274.0 -0.1 3800.6 -0.0 283 20000002 1 2 1 -5276.5 0.1 1457.5 0.0 292 50000003 1 5 1 853.7 0.1 5052.1 0.1
End of MATCH-AT statistic file
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacioninicio.txt (13 de 13)13/01/2011 20:01:25

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
MATCH-AT statistic file -----------------------
Project : final
Date of creation : Sat Feb 13 11:28:56 2010 1. Summary: ------- sigma 0 in micron 6.2
number block points 100 number of images 10
number of iteration 7 redundandancy 342
mean std dev ground x 0.002 [units of terrain system] y 0.003 [units of terrain system] z 0.003 [units of terrain system]
mean std dev ori omega 387.6 [mgrd] phi 429.7 [mgrd] kapp 366.4 [mgrd]
mean std dev ori x 0.003 [units of terrain system] y 0.003 [units of terrain system] z 0.003 [units of terrain system]
rms image points x 3.400 [micron] y 2.100 [micron]
rms control in image x 5.599 [micron] y 5.092 [micron]
rms control in terr x 0.009 [units of terrain system] y 0.008 [units of terrain system] z 0.010 [units of terrain system]
max res. control x -0.027 [units of terrain system] y -0.021 [units of terrain system] z -0.016 [units of terrain system]
rms check points x 0.000 [units of terrain system]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (1 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
y 0.000 [units of terrain system] z 0.000 [units of terrain system]
max res. check x 0.000 [units of terrain system] y 0.000 [units of terrain system] z 0.000 [units of terrain system]
2. Estimated orientation parameters and standard deviations: --------------------------------------------------------
photo ID omega[grd] phi[grd] kappa[grd] X Y Z std.ome[mgrd] std.phi[mgrd] std.kappa[mgrd] std.X std.Y std.Z
544 -1.519592 3.969676 99.683482 102.183 200.557 300.421 411.946 434.255 428.117 0.004 0.004 0.004 542 -1.669995 2.228831 99.447937 101.768 200.551 300.439 396.059 426.548 375.580 0.003 0.003 0.003 543 -1.581358 3.160537 99.493350 101.972 200.553 300.431 406.279 429.493 400.132 0.003 0.003 0.003 540 -1.586190 0.485017 99.491791 101.360 200.542 300.447 389.427 428.381 358.502 0.003 0.003 0.002 541 -1.598114 1.386316 99.416051 101.561 200.547 300.445 389.542 427.085 366.862 0.003 0.003 0.003 538 -2.281670 -0.228734 98.352440 100.745 200.550 300.444 372.385 426.042 336.592 0.003 0.003 0.002 539 -2.527392 0.764163 98.559450 100.969 200.544 300.444 378.559 428.849 335.825 0.003 0.003 0.003 537 -2.120943 -1.072358 98.366712 100.521 200.557 300.440 375.140 430.592 343.677 0.003 0.003 0.003 535 -2.134003 -2.651791 98.815842 100.143 200.553 300.428 381.410 434.555 365.056 0.003 0.003 0.003 536 -2.087135 -1.884005 98.150027 100.323 200.556 300.434 375.440 431.021 353.876 0.003 0.003 0.003
3. GNSS observations and resuduals: -------------------------------
photo ID X Y Z res x res y res z
544 102.150 200.560 300.460 0.033 -0.003 -0.039 542 101.760 200.560 300.460 0.008 -0.009 -0.021 543 101.950 200.560 300.460 0.022 -0.007 -0.029 540 101.340 200.560 300.460 0.020 -0.018 -0.013 541 101.580 200.560 300.460 -0.019 -0.013 -0.015 538 100.770 200.560 300.460 -0.025 -0.010 -0.016 539 100.950 200.560 300.460 0.019 -0.016 -0.016 537 100.550 200.560 300.460 -0.029 -0.003 -0.020 535 100.160 200.560 300.460 -0.017 -0.007 -0.032 536 100.370 200.560 300.460 -0.047 -0.004 -0.026
4. Adjusted coordinates including control/check points and standandard deviations:
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (2 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
------------------------------------------------------------------------------
point ID x y z sx sy sz code fold check blund given x given y given z res x res y res z
A1 100.027 200.001 299.993 0.003 0.003 0.004 6 2 0 0 100.000 200.000 300.000 -0.027 -0.001 0.007 A4 99.997 200.611 299.992 0.003 0.003 0.004 6 2 0 0 100.000 200.590 300.000 0.003 -0.021 0.008 C1 100.398 199.998 300.009 0.002 0.003 0.003 6 4 0 0 100.407 200.000 300.000 0.009 0.002 -0.009 C4 100.395 200.609 300.005 0.002 0.002 0.003 6 4 0 0 100.400 200.613 300.000 0.005 0.004 -0.005 E1 100.814 199.994 300.014 0.002 0.002 0.003 6 3 0 0 100.808 200.000 300.000 -0.006 0.006 -0.014 E4 100.809 200.607 300.010 0.002 0.002 0.003 6 3 0 0 100.801 200.602 300.000 -0.008 -0.005 -0.010 G1 101.204 199.992 300.009 0.002 0.003 0.003 6 3 0 0 101.209 200.000 300.000 0.005 0.008 -0.009 G4 101.197 200.604 300.016 0.002 0.002 0.002 6 3 0 0 101.199 200.599 300.000 0.002 -0.005 -0.016 I1 101.604 199.998 300.008 0.002 0.003 0.003 6 4 0 0 101.609 200.000 300.000 0.005 0.002 -0.008 I4 101.596 200.608 300.014 0.002 0.002 0.003 6 4 0 0 101.601 200.607 300.000 0.005 -0.001 -0.014 K1 102.015 200.000 299.989 0.003 0.003 0.003 6 3 0 0 102.009 200.000 300.000 -0.006 0.000 0.011 K4 102.003 200.614 299.998 0.003 0.003 0.003 6 3 0 0 102.006 200.602 300.000 0.003 -0.012 0.002 20000001 100.036 200.809 299.940 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000002 99.962 200.299 299.943 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000003 99.969 200.906 299.930 0.004 0.004 0.005 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000005 99.931 200.119 299.925 0.004 0.004 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000006 99.933 200.225 299.920 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000007 99.923 200.027 299.933 0.004 0.004 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000008 99.922 200.297 299.939 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000009 99.923 200.354 299.940 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000010 99.919 200.545 299.943 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 20000011 99.925 200.807 299.932 0.004 0.004 0.005 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000001 101.232 200.273 300.097 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000002 101.104 200.196 300.000 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000003 101.098 200.158 300.000 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000004 101.076 199.951 299.996 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000005 101.055 200.015 299.979 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000006 101.036 199.955 299.998 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000007 101.036 200.201 299.999 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000008 101.038 200.893 299.962 0.003 0.003 0.005 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000009 100.984 200.176 300.000 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000010 100.961 200.035 300.059 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000011 100.870 200.433 299.980 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000014 100.225 200.161 299.962 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000015 100.141 200.193 299.956 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000016 100.104 200.157 299.941 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000018 100.075 200.201 299.935 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000019 102.114 200.335 299.953 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000020 102.047 200.456 299.957 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000021 102.041 200.162 299.957 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 30000022 102.038 200.675 299.956 0.003 0.003 0.004 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000001 101.964 200.084 299.961 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (3 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
40000002 101.959 200.165 299.962 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000003 101.926 200.181 299.964 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000004 101.868 200.173 299.987 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000005 101.866 200.210 299.985 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000006 101.862 199.954 299.983 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000007 101.838 200.196 299.989 0.003 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000008 101.686 200.188 299.998 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000009 101.663 200.425 299.976 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000010 101.632 200.185 299.999 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000013 101.551 200.189 300.001 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000014 101.516 200.188 300.001 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000015 101.475 200.185 300.003 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000017 101.432 200.180 300.004 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000018 101.401 200.202 300.002 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000019 101.397 199.960 299.993 0.002 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000020 101.383 200.604 299.983 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000022 101.323 200.182 300.004 0.002 0.002 0.002 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000023 101.203 200.172 300.015 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000025 101.140 200.196 300.000 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000027 100.896 200.199 300.001 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000028 100.729 200.620 299.975 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000029 100.671 199.973 299.977 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000030 100.664 200.181 300.001 0.002 0.002 0.002 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000031 100.604 200.210 300.016 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000032 100.457 199.950 299.995 0.002 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000034 100.464 200.201 299.998 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000035 100.285 200.796 299.956 0.003 0.003 0.004 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 40000036 100.252 200.062 299.965 0.003 0.003 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000002 101.796 200.172 299.991 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000003 101.788 200.012 299.981 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000004 101.778 200.612 299.985 0.002 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000005 101.778 200.229 299.985 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000006 101.773 200.141 299.984 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000007 101.773 199.958 299.987 0.003 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000008 101.773 200.837 299.982 0.003 0.003 0.004 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000010 101.768 200.789 299.983 0.003 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000012 101.761 200.032 299.983 0.002 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000014 101.749 200.616 299.987 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000016 101.737 199.996 299.991 0.002 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000017 101.716 200.207 299.994 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000018 101.712 199.957 299.989 0.003 0.003 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000021 100.616 199.911 299.965 0.002 0.003 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000022 100.605 199.951 299.976 0.002 0.003 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000023 100.600 200.134 299.977 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000024 100.593 200.244 299.978 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000025 100.569 200.169 299.999 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (4 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
50000026 100.572 200.613 299.987 0.002 0.002 0.003 5 2 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000027 100.573 200.823 299.981 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000028 100.569 200.744 299.984 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000029 100.570 200.784 299.983 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000030 100.548 199.996 299.991 0.002 0.002 0.003 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000031 100.565 200.674 299.986 0.002 0.002 0.003 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000032 100.561 200.549 299.990 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000033 100.551 200.272 299.993 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000034 100.543 200.225 299.992 0.002 0.002 0.002 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000035 100.550 200.905 299.977 0.003 0.003 0.004 5 4 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000038 100.503 200.131 299.974 0.002 0.002 0.002 5 5 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000 50000039 100.503 200.716 299.968 0.002 0.002 0.003 5 3 0 0 -999999986991104.000 -999999986991104.000 -999999986991104.000
3. Photo observations and residuals: --------------------------------
photo point status fold automa x vx y vy
539 50000035 0 4 1 4803.5 -113.9 5273.4 78.3 <- eliminated (automatic obs.) 538 C4 1 4 0 857.2 15.4 4709.5 5.5 538 E4 1 3 0 986.8 7.6 -815.6 13.9 540 40000025 1 3 1 -4284.2 13.8 2717.1 -2.3 540 30000009 1 3 1 -4510.3 -13.4 4668.5 3.4 537 C4 1 4 0 861.2 -10.4 1818.2 -8.6 538 40000025 1 3 1 -4135.0 -11.6 -5082.6 -3.9 537 E4 1 3 0 970.9 -10.5 -3739.4 -6.0 542 I4 1 4 0 901.7 4.5 2141.4 -10.5 538 C1 1 4 0 -6978.4 10.2 4294.5 -5.1 539 50000030 1 5 1 -6528.7 11.2 4878.5 -1.2 539 30000009 1 3 1 -4433.8 6.7 -361.2 -8.8 543 50000003 1 4 1 -6510.3 -9.6 1917.2 4.3 540 G1 1 3 0 -6931.8 -1.3 1899.2 10.0 538 50000034 1 4 1 -3951.2 7.7 2465.4 -5.5 540 G4 1 3 0 966.7 -6.9 2173.8 -6.2 540 30000002 1 3 1 -4283.5 9.0 3176.0 -1.4 535 50000034 1 4 1 -3837.1 -9.0 -4846.7 1.6 543 I1 1 4 0 -6979.4 8.8 4350.7 -2.0 538 30000009 1 3 1 -4456.8 6.9 -3129.4 5.7 538 50000028 1 4 1 2649.8 -8.4 2357.4 -3.0 536 C4 1 4 0 930.8 -8.8 -782.9 -1.3 538 50000024 1 4 1 -3566.0 -8.2 1784.2 3.1 544 50000004 1 5 1 792.9 4.8 4782.0 -6.9 539 50000033 1 5 1 -3261.0 -7.9 5040.8 1.6 541 40000022 1 3 1 -4531.8 2.1 2871.1 -7.7
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (5 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
538 50000030 1 5 1 -6655.9 -6.5 2277.7 4.5 539 E4 1 3 0 1017.2 2.5 2107.9 -7.4 540 I4 1 4 0 1066.9 -5.9 -3218.4 4.9 541 40000019 1 3 1 -7124.4 -6.5 1838.3 3.9 538 40000036 1 3 1 -5666.8 -7.6 5665.8 -0.2 543 I4 1 4 0 837.0 2.4 4743.4 7.0 537 C1 1 4 0 -7099.5 0.5 1502.5 7.3 542 50000003 1 4 1 -6490.6 1.7 -502.2 -7.0 536 50000030 1 5 1 -6675.2 -6.3 -2807.2 -3.4 538 50000023 1 4 1 -4852.3 -7.1 1646.6 0.5 537 50000024 1 4 1 -3635.5 6.4 -882.5 -3.0 542 50000004 1 5 1 939.3 -5.4 -339.7 4.6 540 50000004 1 5 1 1063.1 4.0 -5343.3 -5.7 541 G1 1 3 0 -6949.1 1.0 4357.6 -6.8 540 50000016 1 5 1 -6596.6 -6.5 -4777.8 -1.5 538 30000002 1 3 1 -4156.5 -6.1 -4628.9 -2.4 543 50000018 1 5 1 -7243.2 -6.5 2870.3 -0.5 535 50000023 1 4 1 -4757.4 6.0 -5338.7 2.3 539 30000010 1 2 1 -7064.2 -6.4 -122.4 0.1 539 40000025 1 3 1 -4150.8 -2.4 -2352.1 5.8 538 30000010 1 2 1 -7117.9 6.3 -3265.6 0.0 541 G4 1 3 0 860.2 5.3 4741.4 3.4 544 K4 1 3 0 895.9 -6.2 2063.9 1.4 536 C1 1 4 0 -7050.9 -6.1 -1009.0 -1.2 542 K4 1 3 0 1026.2 6.1 -3374.1 1.1 541 50000006 1 4 1 -4886.2 6.1 -2812.5 -1.0 535 C4 1 4 0 992.3 4.3 -3142.4 4.3 538 50000025 1 5 1 -4679.9 1.5 2143.3 -5.8 537 50000033 1 5 1 -3418.2 5.8 -381.5 -0.0 536 40000036 1 3 1 -5790.6 5.7 850.2 1.0 540 50000003 1 4 1 -6284.7 5.4 -5304.0 1.8 537 50000038 1 5 1 -4975.4 5.6 178.2 -0.7 542 I1 1 4 0 -6977.8 -5.6 1840.3 -0.3 544 50000006 1 4 1 -5004.1 -5.5 4667.4 0.7 544 50000017 1 5 1 -4265.2 -3.8 5471.8 4.0 539 E1 1 3 0 -6865.7 5.0 1758.2 -2.2 535 50000030 1 5 1 -6574.2 4.2 -4854.9 3.4 541 40000010 1 4 1 -4475.6 1.2 -1080.6 5.3 535 50000031 1 4 1 1817.9 5.3 -5115.8 -0.6 541 I1 1 4 0 -6926.9 -2.1 -749.4 4.8 539 50000025 1 5 1 -4569.4 -4.0 4818.3 3.3 543 50000004 1 5 1 873.8 -0.8 2191.6 5.1 537 40000032 1 3 1 -7417.6 -5.1 700.0 0.2 537 50000028 1 4 1 2620.6 2.5 -465.6 4.5 543 50000012 1 5 1 -6295.1 -4.7 2258.2 1.9 536 50000024 1 4 1 -3554.1 3.5 -3241.2 -3.6
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (6 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
535 50000028 1 4 1 2713.7 4.6 -5145.1 -1.8 541 30000001 1 2 1 -4292.0 -4.9 5116.3 -0.1 544 K1 1 3 0 -6979.4 -4.8 1753.2 0.8 540 30000001 1 2 1 -4245.6 4.9 1997.9 0.2 543 50000016 1 5 1 -6824.1 4.6 2586.0 1.2 543 50000006 1 4 1 -4992.8 -3.9 2145.0 -2.7 539 30000007 1 3 1 -4108.6 4.7 -1011.1 0.4 535 C1 1 4 0 -6940.0 -4.1 -3183.4 -2.2 538 50000031 1 4 1 1743.6 -4.1 2379.1 -2.2 539 30000002 1 3 1 -4159.6 -3.0 -1887.5 3.6 542 50000006 1 4 1 -4967.5 3.2 -322.0 3.3 539 50000038 1 5 1 -4769.7 -4.5 5316.3 0.7 539 50000034 1 4 1 -3848.3 1.1 5103.1 4.4 542 50000018 1 5 1 -7242.3 4.5 426.3 0.3 544 50000012 1 5 1 -6301.9 3.4 4767.5 -2.8 537 50000025 1 5 1 -4752.1 4.3 -644.3 1.0 537 50000021 1 4 1 -7324.8 1.3 -1210.9 4.2 540 30000007 1 3 1 -4200.8 -4.3 4030.6 -0.1 543 50000005 1 5 1 -3935.3 0.5 2117.3 -4.3 540 40000019 1 3 1 -7083.2 3.8 -549.1 -2.0 537 50000030 1 5 1 -6753.8 -2.3 -406.2 -3.5 542 40000022 1 3 1 -4551.4 -1.7 5360.1 3.9 541 50000018 1 5 1 -7162.1 -2.1 -2059.6 -3.7 535 50000033 1 5 1 -3258.9 4.2 -4956.5 -0.0 542 50000017 1 5 1 -4232.5 1.3 424.8 -3.9 537 40000029 1 4 1 -6758.0 2.9 -1874.9 -3.0 538 50000039 1 3 1 2188.2 -4.0 3085.3 -1.1 539 30000004 1 2 1 -7065.5 -4.1 -1550.2 0.1 538 30000004 1 2 1 -7085.7 4.1 -4235.5 0.0 535 50000024 1 4 1 -3469.0 -1.8 -5287.9 3.7 538 40000028 1 3 1 1082.0 -3.8 256.8 -1.4 537 E1 1 3 0 -6985.1 -3.8 -3870.1 -1.3 540 40000022 1 3 1 -4475.8 -0.4 388.4 3.9 544 30000019 1 3 1 -2568.8 3.9 476.0 0.4 539 50000021 1 4 1 -7108.9 3.4 3798.4 -1.9 538 E1 1 3 0 -6942.4 -0.7 -1044.5 3.8 539 G1 1 3 0 -6772.5 1.1 -3223.0 -3.7 540 50000012 1 5 1 -6078.2 3.7 -5002.7 -1.1 537 50000031 1 4 1 1718.4 -0.9 -440.3 3.7 542 50000014 1 5 1 988.8 2.1 39.1 3.2 536 50000021 1 4 1 -7236.6 -1.8 -3454.2 -3.2 541 50000005 1 5 1 -3816.3 1.8 -2884.2 3.2 536 50000023 1 4 1 -4844.4 1.2 -3331.8 -3.4 536 20000007 1 2 1 -6013.5 3.6 4582.9 0.1 543 50000002 1 2 1 -4712.5 3.6 1906.0 0.0 535 20000007 1 2 1 -5922.0 -3.6 2677.2 -0.2
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (7 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
542 50000002 1 2 1 -4667.9 -3.6 -605.7 -0.1 541 50000004 1 5 1 1006.4 -2.5 -2905.0 2.6 538 50000027 1 4 1 3651.2 3.4 2327.2 -1.1 544 50000005 1 5 1 -3956.1 -2.4 4652.8 2.6 541 40000003 1 4 1 -4216.2 -3.5 -4559.4 -0.5 538 50000022 1 2 1 -6953.0 -3.5 1514.2 0.0 536 20000011 1 2 1 3058.0 3.5 5057.4 0.2 536 50000022 1 2 1 -6960.2 3.5 -3401.3 0.1 535 20000011 1 2 1 3221.5 -3.5 2957.4 -0.1 541 40000013 1 3 1 -4441.7 -0.4 -39.2 3.4 540 50000018 1 5 1 -7051.7 2.0 -4442.0 2.8 538 40000030 1 2 1 -4513.5 3.4 935.0 -0.0 536 40000030 1 2 1 -4465.9 -3.4 -4312.6 -0.1 542 40000019 1 3 1 -7141.6 2.8 4284.5 -2.0 540 I1 1 4 0 -6831.7 -1.0 -3232.7 -3.3 542 40000008 1 4 1 -4513.5 2.5 795.8 2.3 542 30000019 1 3 1 -2419.2 -3.4 -4420.2 0.2 536 50000029 1 4 1 3200.7 0.6 -2926.0 3.3 536 50000027 1 4 1 3705.5 -2.6 -2937.8 2.1 536 A4 1 2 0 797.5 -2.7 4596.2 2.0 543 40000006 1 4 1 -7294.9 1.8 1017.6 2.8 537 50000039 1 3 1 2166.0 2.4 376.3 2.3 537 50000035 1 4 1 4680.9 3.2 -161.7 0.7 544 30000020 1 3 1 -1115.6 3.3 1307.9 -0.2 542 50000012 1 5 1 -6273.5 -0.3 -181.5 3.2 537 40000028 1 3 1 1046.4 1.5 -2472.4 2.8 543 50000017 1 5 1 -4259.2 1.2 2926.4 -3.0 543 50000010 1 5 1 3158.1 -0.9 2355.9 -3.0 542 30000020 1 3 1 -979.8 -3.1 -3635.4 -0.3 536 30000018 1 3 1 -3997.1 3.0 2916.2 0.8 536 50000038 1 5 1 -4908.4 3.1 -2162.8 -0.3 540 30000003 1 3 1 -4749.2 -3.0 3238.9 -0.5 539 G4 1 3 0 1124.2 1.3 -3178.1 2.7 536 50000025 1 5 1 -4666.6 -1.1 -3111.2 2.7 538 40000032 1 3 1 -7304.7 2.9 3394.6 -0.2 540 40000010 1 4 1 -4383.5 0.9 -3541.1 -2.8 536 50000032 1 4 1 181.3 0.3 -2885.4 2.9 542 K1 1 3 0 -6852.5 2.7 -3421.9 -1.0 541 40000017 1 3 1 -4573.1 2.6 1492.3 -1.3 535 50000038 1 5 1 -4809.5 -2.8 -4186.3 0.7 538 50000021 1 4 1 -7236.4 -2.8 1330.0 0.7 541 50000003 1 4 1 -6403.7 2.4 -2970.9 1.4 537 40000035 1 3 1 3059.3 2.8 3080.4 0.2 543 K4 1 3 0 974.1 -0.8 -702.5 -2.6 542 40000006 1 4 1 -7243.0 -2.7 -1437.9 0.4 542 50000010 1 5 1 3235.9 -1.5 -189.3 2.3
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (8 de 12)13/01/2011 20:01:26
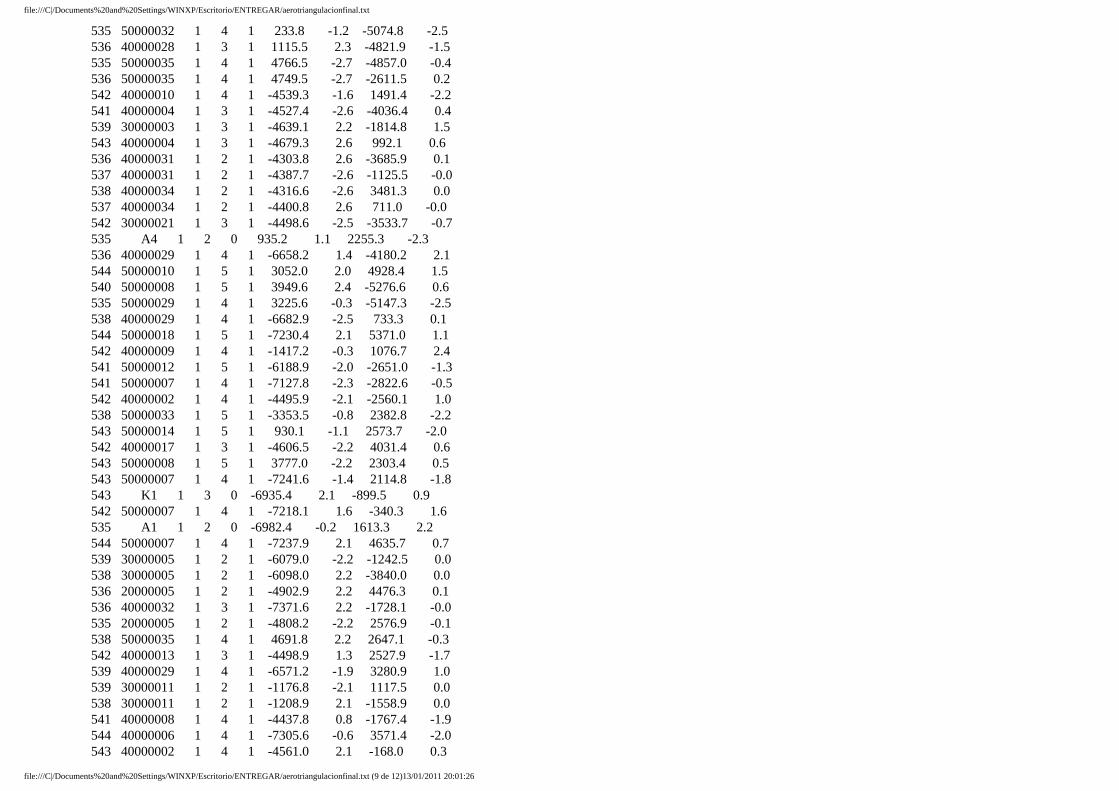
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
535 50000032 1 4 1 233.8 -1.2 -5074.8 -2.5 536 40000028 1 3 1 1115.5 2.3 -4821.9 -1.5 535 50000035 1 4 1 4766.5 -2.7 -4857.0 -0.4 536 50000035 1 4 1 4749.5 -2.7 -2611.5 0.2 542 40000010 1 4 1 -4539.3 -1.6 1491.4 -2.2 541 40000004 1 3 1 -4527.4 -2.6 -4036.4 0.4 539 30000003 1 3 1 -4639.1 2.2 -1814.8 1.5 543 40000004 1 3 1 -4679.3 2.6 992.1 0.6 536 40000031 1 2 1 -4303.8 2.6 -3685.9 0.1 537 40000031 1 2 1 -4387.7 -2.6 -1125.5 -0.0 538 40000034 1 2 1 -4316.6 -2.6 3481.3 0.0 537 40000034 1 2 1 -4400.8 2.6 711.0 -0.0 542 30000021 1 3 1 -4498.6 -2.5 -3533.7 -0.7 535 A4 1 2 0 935.2 1.1 2255.3 -2.3 536 40000029 1 4 1 -6658.2 1.4 -4180.2 2.1 544 50000010 1 5 1 3052.0 2.0 4928.4 1.5 540 50000008 1 5 1 3949.6 2.4 -5276.6 0.6 535 50000029 1 4 1 3225.6 -0.3 -5147.3 -2.5 538 40000029 1 4 1 -6682.9 -2.5 733.3 0.1 544 50000018 1 5 1 -7230.4 2.1 5371.0 1.1 542 40000009 1 4 1 -1417.2 -0.3 1076.7 2.4 541 50000012 1 5 1 -6188.9 -2.0 -2651.0 -1.3 541 50000007 1 4 1 -7127.8 -2.3 -2822.6 -0.5 542 40000002 1 4 1 -4495.9 -2.1 -2560.1 1.0 538 50000033 1 5 1 -3353.5 -0.8 2382.8 -2.2 543 50000014 1 5 1 930.1 -1.1 2573.7 -2.0 542 40000017 1 3 1 -4606.5 -2.2 4031.4 0.6 543 50000008 1 5 1 3777.0 -2.2 2303.4 0.5 543 50000007 1 4 1 -7241.6 -1.4 2114.8 -1.8 543 K1 1 3 0 -6935.4 2.1 -899.5 0.9 542 50000007 1 4 1 -7218.1 1.6 -340.3 1.6 535 A1 1 2 0 -6982.4 -0.2 1613.3 2.2 544 50000007 1 4 1 -7237.9 2.1 4635.7 0.7 539 30000005 1 2 1 -6079.0 -2.2 -1242.5 0.0 538 30000005 1 2 1 -6098.0 2.2 -3840.0 0.0 536 20000005 1 2 1 -4902.9 2.2 4476.3 0.1 536 40000032 1 3 1 -7371.6 2.2 -1728.1 -0.0 535 20000005 1 2 1 -4808.2 -2.2 2576.9 -0.1 538 50000035 1 4 1 4691.8 2.2 2647.1 -0.3 542 40000013 1 3 1 -4498.9 1.3 2527.9 -1.7 539 40000029 1 4 1 -6571.2 -1.9 3280.9 1.0 539 30000011 1 2 1 -1176.8 -2.1 1117.5 0.0 538 30000011 1 2 1 -1208.9 2.1 -1558.9 0.0 541 40000008 1 4 1 -4437.8 0.8 -1767.4 -1.9 544 40000006 1 4 1 -7305.6 -0.6 3571.4 -2.0 543 40000002 1 4 1 -4561.0 2.1 -168.0 0.3
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (9 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
536 50000039 1 3 1 2233.4 1.6 -2001.8 -1.2 540 40000013 1 3 1 -4359.0 -0.9 -2518.2 -1.8 536 20000003 1 2 1 4277.6 2.0 4558.7 0.1 535 20000003 1 2 1 4438.4 -2.0 2437.3 -0.1 540 40000008 1 4 1 -4336.9 -1.9 -4229.2 0.5 535 30000015 1 3 1 -4137.1 1.9 197.1 -0.4 537 30000014 1 3 1 -4629.9 -1.9 3515.6 -0.2 541 40000006 1 4 1 -7142.5 1.5 -3907.7 -1.2 543 40000009 1 4 1 -1459.0 1.2 3495.9 -1.5 541 50000017 1 5 1 -4155.0 1.3 -2132.3 1.3 537 30000018 1 3 1 -3993.4 -1.8 5079.2 -0.4 540 50000017 1 5 1 -4054.3 -0.1 -4571.2 1.9 535 50000027 1 4 1 3722.3 -0.1 -5161.6 -1.8 540 40000014 1 2 1 -4373.8 -1.8 -2063.9 -0.1 541 40000014 1 2 1 -4455.0 1.8 416.9 0.0 536 20000002 1 2 1 -2991.1 -1.8 4372.8 -0.1 536 50000033 1 5 1 -3335.4 -1.5 -2829.5 0.9 535 20000002 1 2 1 -2889.3 1.8 2357.8 0.1 543 40000003 1 4 1 -4375.5 1.0 235.7 -1.4 535 40000036 1 3 1 -5691.4 1.7 -1174.3 -0.6 544 30000021 1 3 1 -4634.4 1.6 1333.1 -0.6 536 20000010 1 2 1 -93.3 1.7 5057.2 0.1 536 40000035 1 3 1 3138.3 -1.7 735.1 -0.3 535 20000010 1 2 1 42.0 -1.7 2977.4 -0.1 536 20000009 1 2 1 -2353.6 -1.7 4855.9 -0.1 541 I4 1 4 0 985.7 -1.0 -582.8 -1.4 544 40000003 1 4 1 -4418.0 1.6 2726.0 0.5 535 20000009 1 2 1 -2245.0 1.7 2838.0 0.1 543 40000008 1 4 1 -4530.4 -1.4 3309.3 -0.9 541 50000016 1 5 1 -6722.1 1.6 -2390.2 0.4 544 40000001 1 4 1 -5545.8 1.6 2240.7 0.2 544 50000016 1 5 1 -6807.5 -0.2 5119.3 -1.6 537 30000015 1 3 1 -4237.1 -1.5 4495.3 -0.4 538 50000038 1 5 1 -4890.2 -1.6 2799.5 -0.2 541 50000010 1 5 1 3295.0 0.1 -2764.7 -1.6 537 50000032 1 4 1 108.1 1.2 -415.0 1.0 535 30000014 1 3 1 -4521.0 1.6 -824.9 -0.2 543 30000021 1 3 1 -4574.6 0.8 -1162.7 1.3 536 30000016 1 3 1 -4534.8 0.1 2581.9 1.5 542 40000003 1 4 1 -4319.5 0.8 -2164.4 1.3 538 50000032 1 4 1 140.2 -0.3 2394.6 -1.5 535 50000025 1 5 1 -4572.0 -0.9 -5228.0 -1.2 544 50000014 1 5 1 854.9 -1.4 5141.4 -0.1 542 50000008 1 5 1 3855.0 1.2 -234.8 -0.8 538 50000029 1 4 1 3151.9 0.8 2351.3 -1.2 536 50000028 1 4 1 2688.5 1.4 -2923.7 0.1
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (10 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
541 40000002 1 4 1 -4393.1 -1.0 -4942.4 -0.8 535 30000018 1 3 1 -3899.4 -1.2 963.4 -0.4 540 50000005 1 5 1 -3712.0 -0.6 -5268.7 -1.1 544 30000022 1 2 1 1589.1 -1.3 1439.3 -0.0 540 40000009 1 4 1 -1268.3 -1.1 -3781.2 -0.7 543 30000022 1 2 1 1667.2 1.3 -1101.9 0.0 538 30000003 1 3 1 -4638.7 0.8 -4553.9 -0.9 544 40000002 1 4 1 -4606.1 1.1 2326.9 -0.5 536 50000031 1 4 1 1786.8 -0.2 -2901.1 -1.2 536 20000001 1 2 1 3162.2 1.2 3755.6 0.1 542 50000016 1 5 1 -6800.7 0.4 118.4 1.1 540 50000014 1 5 1 1125.9 -0.2 -4988.7 -1.2 535 20000001 1 2 1 3299.9 -1.2 1617.4 -0.0 535 30000016 1 3 1 -4441.6 -0.8 616.0 -0.8 540 40000018 1 3 1 -4203.3 1.1 -601.9 0.1 537 50000027 1 4 1 3640.0 -0.8 -484.6 0.8 537 50000029 1 4 1 3137.0 -1.0 -464.4 0.3 535 40000035 1 3 1 3221.9 -1.1 -1448.1 0.1 542 40000004 1 3 1 -4628.0 0.0 -1514.9 -1.1 537 30000016 1 3 1 -4535.1 0.7 4774.5 -0.7 543 40000001 1 4 1 -5500.1 -0.9 -242.8 -0.2 543 40000005 1 2 1 -4204.1 0.9 1019.9 0.0 542 40000005 1 2 1 -4153.6 -0.9 -1481.8 -0.0 541 40000015 1 2 1 -4498.4 0.9 937.4 0.0 540 40000015 1 2 1 -4423.7 -0.9 -1550.5 -0.0 542 40000001 1 4 1 -5436.2 -0.9 -2619.7 -0.4 539 40000027 1 2 1 -4177.2 0.9 757.5 -0.0 536 20000008 1 2 1 -3013.9 -0.9 4816.8 -0.0 538 40000027 1 2 1 -4213.5 -0.9 -2006.9 -0.0 535 20000008 1 2 1 -2909.0 0.9 2817.8 0.0 536 30000015 1 3 1 -4229.5 -0.4 2230.4 0.8 541 40000023 1 2 1 -4771.4 0.9 4478.9 0.0 540 40000023 1 2 1 -4732.8 -0.9 1977.6 -0.0 543 30000019 1 3 1 -2492.1 -0.6 -2036.9 -0.6 540 50000010 1 5 1 3339.3 0.3 -5230.8 0.8 541 50000008 1 5 1 3914.2 -0.8 -2813.2 -0.3 537 50000023 1 4 1 -4924.3 -0.1 -998.0 0.8 536 50000026 1 2 1 998.7 -0.8 -2993.6 -0.0 537 50000026 1 2 1 926.4 0.8 -537.5 0.0 542 40000018 1 3 1 -4302.0 -0.8 4396.3 0.0 540 40000017 1 3 1 -4502.9 -0.4 -998.8 0.7 538 30000008 1 2 1 4536.1 0.8 -3468.4 -0.0 539 30000008 1 2 1 4589.4 -0.8 -822.6 -0.0 542 50000005 1 5 1 -3898.6 0.6 -367.1 -0.3 539 30000006 1 2 1 -7054.6 -0.7 -1062.5 0.0 538 30000006 1 2 1 -7078.5 0.7 -3762.5 0.0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (11 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt
541 50000014 1 5 1 1060.9 0.6 -2531.1 0.1 544 50000008 1 5 1 3664.7 -0.6 4879.4 0.1 543 40000010 1 4 1 -4552.6 -0.5 3983.1 -0.3 536 30000014 1 3 1 -4613.5 0.3 1218.1 0.4 543 30000020 1 3 1 -1042.2 -0.1 -1220.5 0.5 537 50000034 1 4 1 -4008.3 0.1 -288.8 -0.5 538 30000007 1 3 1 -4116.1 -0.3 -3760.8 -0.2 541 40000018 1 3 1 -4266.0 -0.4 1874.6 -0.0 541 40000001 1 4 1 -5326.9 0.2 -4989.9 0.3 541 40000009 1 4 1 -1347.3 0.2 -1398.6 -0.2 541 40000020 1 2 1 836.1 0.3 2109.3 0.0 540 40000020 1 2 1 916.3 -0.3 -320.3 -0.0 541 40000007 1 2 1 -4259.4 -0.2 -3672.9 -0.0 536 20000006 1 2 1 -3693.7 -0.2 4483.7 -0.0 542 40000007 1 2 1 -4353.0 0.2 -1141.5 0.0 535 20000006 1 2 1 -3596.6 0.2 2577.5 0.0 536 A1 1 2 0 -7075.1 0.0 3775.8 -0.1
End of MATCH-AT statistic file
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aerotriangulacionfinal.txt (12 de 12)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
--------------------------------------------------------------------------- MATCH-AT [Version 5.2.1 (32bit)] build at Jul 16 2009 22:57:40
(c) INPHO GmbH Stuttgart 2008
Start AAT computation: Sat Feb 13 09:51:52 2010
Running 32 bit build on Microsoft Windows XP Professional Service Pack 3 (build 2600)
Windows 5.1.2600, 5 cores, 3.0 GBytes RAM---------------------------------------------------------------------------
Program was started as :
C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe -project D:\proyectos\inicio\inicio.prj
Parameters of the project : ===========================
Project : inicio Active Block : complete Block Number of photos : 10 Number of strips : 1
Photo scale : 1:114 Mean terrain height [m] : 300
Strategy parameter : --------------------
Overview # to start : 3 Overview # to stop : 0 # of pyramid levels to be processed : 4 # of tie points to be measured in last level : 3 Use manual measurements as TPC : ON Create numeric point id : ON TiePointCenterPattern : 4 x 4 TiePoint density : default Thinout size in pixel : 50 Try to track points from upper levels: : OFF Matching sequence : FBM FBM LSM LSM Number additional threads : 1 Cache size per thread : 10 MByte
Working directory : .\
Matching parameter : --------------------
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (1 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
FBM-Method:
Matching window : 100 x 100 Operator window size : 5 x 5 Non-max. suppr. window size : 5 Threshold for correlation coefficient : 0.92 Window for correlation coefficient : 5 x 5 Wmin : 0.10 Qmin (roundness) : 0.50 Parallax bound : 30 Epipolar line to be used : OFF Distance to epipolar lines : 0.50
LSM-Method:
Correlation coefficient : 0.93 Template size [pixel] : 21 Edge size [pixel] : 6 # of iterations : 20
Control parameter for block adjustment : ----------------------------------------
Selfcalibration : OFF GNSS-Mode : ON Drift-Mode : OFF IMU-Mode : OFF Earth's curvature correction : OFF Atmospheric correction : OFF Do not eliminate manual points : OFF
Standard deviations (a-priori) : --------------------------------
Ground control (planimetry) [m]
Set 0 (=default) : 0.050
Ground control (height) [m]
Set 0 (=default) : 0.050
Automatic image points [mm]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (2 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
Set 0 (=default) : 0.050
Image points of ground control and manual measurements [mm] : 0.050
GNSS X Y Z [m] : 0.100 0.100 0.100
Used Cameras in block: -----------------------
1 DSC_W80 Distortion : No correction GPS antenna eccentricity X Y Z [m] : 0.000 0.000 0.000
Pyramid level 3 (pixel size 40 micron) started : Sat Feb 13 09:51:57 2010 ============================================================================
Matching statistic: ------------------
Matched point types per tie point area:
* : weak connection ** : no tie points *** : no image overlap in tie point area
TPC-ID # photos 2x 3x 4x 5x 6x 7x >=8x
TPC_00001 2 1 0 0 0 0 0 0 TPC_00002 2 3 0 0 0 0 0 0 TPC_00003 4 16 2 1 0 0 0 0 TPC_00004 * 4 8 6 0 0 0 0 0 TPC_00005 * 4 16 3 0 0 0 0 0 TPC_00006 * 4 6 1 0 0 0 0 0 TPC_00007 * 4 19 2 0 0 0 0 0 TPC_00008 * 4 1 2 0 0 0 0 0 TPC_00009 4 6 11 4 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (3 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
TPC_00013 * 5 8 2 0 0 0 0 0 TPC_00010 * 4 12 5 0 0 0 0 0 TPC_00011 4 12 7 2 0 0 0 0 TPC_00012 4 11 6 2 0 0 0 0 TPC_00014 * 5 4 0 0 0 0 0 0 TPC_00015 5 12 2 1 0 0 0 0 TPC_00016 * 5 2 1 0 0 0 0 0 TPC_00017 5 12 1 2 0 0 0 0 TPC_00018 * 5 2 0 0 0 0 0 0 TPC_00019 5 15 5 1 0 0 0 0 TPC_00020 * 5 10 2 0 0 0 0 0 TPC_00021 5 15 5 1 0 0 0 0 TPC_00022 * 5 11 3 0 0 0 0 0 TPC_00025 * 4 5 0 0 0 0 0 0 TPC_00023 5 18 2 1 0 0 0 0 TPC_00024 * 5 10 2 0 0 0 0 0 TPC_00027 3 3 0 0 0 0 0 0 TPC_00026 * 4 2 0 0 0 0 0 0 TPC_00028 3 2 0 0 0 0 0 0 TPC_00029 3 2 0 0 0 0 0 0 TPC_00030 ** 3 0 0 0 0 0 0 0
Matched point types for entire block:
#-fold matched used FBM LSM LSM-tracked: 2 281 244 244 0 0 3 70 70 70 0 0 4 15 15 15 0 0
Tie Point Generator -------------------
created 129 observations for photo 290 created 133 observations for photo 291 created 43 observations for photo 283 created 59 observations for photo 292 created 49 observations for photo 284 created 57 observations for photo 285 created 68 observations for photo 286 created 49 observations for photo 287 created 87 observations for photo 288 created 126 observations for photo 289
total of 800 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 188.4 micron (09:52:01) sigma naught 90.1 micron (09:52:02) sigma naught 33.4 micron (09:52:02)
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (4 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
sigma naught 16.0 micron (09:52:03) sigma naught 9.9 micron (09:52:03) sigma naught 8.2 micron (09:52:03) sigma naught 7.2 micron (09:52:04) sigma naught 6.7 micron (09:52:04) sigma naught 6.2 micron (09:52:05) sigma naught 5.8 micron (09:52:05) sigma naught 5.6 micron (09:52:05) sigma naught 5.3 micron (09:52:06) sigma naught 5.1 micron (09:52:06) sigma naught 4.9 micron (09:52:07) sigma naught 6.4 micron (09:52:07) sigma naught 6.4 micron (09:52:07)
found 231 points connecting 2 photos found 55 points connecting 3 photos found 14 points connecting 4 photos
number of observations 1514 number of unknowns 1083 redundancy 431
RMS automatic points in photo (number: 682) x 4.4 micron y 2.2 micron
RMS control and manual points in photo (number: 42) x 11.9 micron y 8.6 micron
RMS control points with default standard deviation set (number: 12) x 0.011 [meter] y 0.007 [meter]
RMS control points with default standard deviation set (number: 12) z 0.011 [meter]
RMS GNSS observations (number: 10) x 0.027 [meter] y 0.010 [meter] z 0.024 [meter]
residuals horizontal control points in [meter]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (5 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
control point ID rx ry
A1 -0.028 0.001 A4 0.009 -0.019 C1 0.011 0.003 C4 0.007 0.004 E1 -0.004 0.008 E4 -0.006 -0.005 G1 0.009 0.005 G4 0.000 -0.008 I1 0.012 -0.000 I4 0.008 -0.002 K1 -0.001 0.002 K4 0.005 -0.009
residuals vertical control points in [meter]
control point ID rz
A1 0.015 A4 0.012 C1 -0.003 C4 -0.007 E1 -0.011 E4 -0.016 G1 -0.013 G4 -0.016 I1 -0.013 I4 -0.011 K1 0.005 K4 0.004
residuals GNSS observations in [meter]
photo ID rx ry rz
283 -0.026 -0.013 -0.031 284 -0.035 -0.009 -0.022 285 0.021 -0.006 -0.016 286 -0.010 -0.015 -0.011 287 0.026 -0.017 -0.012 288 0.014 -0.009 -0.016 289 0.007 -0.005 -0.019 290 0.008 -0.007 -0.022 291 0.045 -0.004 -0.033 292 0.041 0.001 -0.039
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] )
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (6 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
283 100.134 200.547 300.429 -0.9933 -3.2586 90.2577 284 100.335 200.551 300.438 -0.9678 -2.4750 90.4921 285 100.571 200.554 300.444 -1.2049 -1.5950 88.8552 286 100.760 200.545 300.449 -1.2466 -0.8484 90.1507 287 101.006 200.543 300.448 -1.7754 -0.1174 90.1047 288 101.384 200.551 300.444 -2.1408 0.2992 90.5396 289 101.608 200.555 300.441 -1.9788 1.0513 90.5950 290 101.788 200.553 300.438 -1.9640 1.6698 90.8356 291 102.015 200.556 300.427 -1.8705 2.7871 89.6025 292 102.191 200.561 300.421 -1.9980 2.7266 90.4014
Sigma naught : 6.4 [micron] = 0.2 [pixel]
Pyramid level 2 (pixel size 20 micron) started : Sat Feb 13 09:52:11 2010 ============================================================================
Matching statistic: ------------------
Matched point types per tie point area:
* : weak connection ** : no tie points *** : no image overlap in tie point area
TPC-ID # photos 2x 3x 4x 5x 6x 7x >=8x
TPC_00001 2 2 0 0 0 0 0 0 TPC_00002 2 9 0 0 0 0 0 0 TPC_00003 4 12 7 2 0 0 0 0 TPC_00004 * 4 18 3 0 0 0 0 0 TPC_00006 4 5 1 3 0 0 0 0 TPC_00005 4 17 3 1 0 0 0 0 TPC_00008 * 4 5 0 0 0 0 0 0 TPC_00007 * 4 11 10 0 0 0 0 0 TPC_00013 * 6 6 0 0 0 0 0 0 TPC_00011 4 0 16 5 0 0 0 0 TPC_00009 4 0 14 7 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (7 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
TPC_00014 * 6 8 0 0 0 0 0 0 TPC_00010 4 13 1 1 0 0 0 0 TPC_00012 * 4 11 1 0 0 0 0 0 TPC_00017 ** 6 0 0 0 0 0 0 0 TPC_00019 * 6 1 0 0 0 0 0 0 TPC_00020 * 6 4 0 0 0 0 0 0 TPC_00015 * 6 13 8 0 0 0 0 0 TPC_00021 ** 6 0 0 0 0 0 0 0 TPC_00016 * 6 13 8 0 0 0 0 0 TPC_00024 * 6 11 0 0 0 0 0 0 TPC_00023 ** 6 0 0 0 0 0 0 0 TPC_00025 ** 6 0 0 0 0 0 0 0 TPC_00026 * 6 4 0 0 0 0 0 0 TPC_00018 * 6 14 7 0 0 0 0 0 TPC_00022 * 6 12 9 0 0 0 0 0 TPC_00030 * 5 4 0 0 0 0 0 0 TPC_00028 5 11 4 3 0 0 0 0 TPC_00031 * 5 1 0 0 0 0 0 0 TPC_00029 * 5 12 9 0 0 0 0 0 TPC_00027 5 11 8 2 0 0 0 0 TPC_00034 5 8 1 1 0 0 0 0 TPC_00032 5 0 19 2 0 0 0 0 TPC_00037 5 9 0 2 0 0 0 0 TPC_00038 * 5 5 0 0 0 0 0 0 TPC_00035 5 6 1 1 0 0 0 0 TPC_00040 * 5 8 2 0 0 0 0 0 TPC_00041 5 17 1 1 0 0 0 0 TPC_00033 5 0 11 7 3 0 0 0 TPC_00042 * 5 11 0 0 0 0 0 0 TPC_00036 5 0 14 7 0 0 0 0 TPC_00045 ** 5 0 0 0 0 0 0 0 TPC_00039 * 5 18 3 0 0 0 0 0 TPC_00048 5 8 6 5 2 0 0 0 TPC_00044 5 14 5 2 0 0 0 0 TPC_00043 * 5 1 0 0 0 0 0 0 TPC_00049 ** 5 0 0 0 0 0 0 0 TPC_00051 ** 5 0 0 0 0 0 0 0 TPC_00052 ** 5 0 0 0 0 0 0 0 TPC_00046 5 17 1 3 0 0 0 0 TPC_00050 5 6 1 3 0 0 0 0 TPC_00047 5 13 5 3 0 0 0 0 TPC_00054 ** 5 0 0 0 0 0 0 0 TPC_00057 * 5 9 0 0 0 0 0 0 TPC_00056 * 5 4 0 0 0 0 0 0 TPC_00059 ** 5 0 0 0 0 0 0 0 TPC_00058 * 5 20 1 0 0 0 0 0 TPC_00060 5 16 3 2 0 0 0 0 TPC_00055 * 5 5 0 0 0 0 0 0 TPC_00053 5 7 6 1 0 0 0 0 TPC_00061 * 5 5 0 0 0 0 0 0 TPC_00062 ** 5 0 0 0 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (8 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
TPC_00067 ** 4 0 0 0 0 0 0 0 TPC_00064 * 5 1 0 0 0 0 0 0 TPC_00065 * 4 9 3 0 0 0 0 0 TPC_00066 4 16 4 1 0 0 0 0 TPC_00068 * 4 2 0 0 0 0 0 0 TPC_00069 ** 4 0 0 0 0 0 0 0 TPC_00072 ** 4 0 0 0 0 0 0 0 TPC_00071 * 4 8 2 0 0 0 0 0 TPC_00075 * 4 5 0 0 0 0 0 0 TPC_00063 5 0 8 9 4 0 0 0 TPC_00070 4 19 1 1 0 0 0 0 TPC_00073 * 4 12 1 0 0 0 0 0 TPC_00078 ** 4 0 0 0 0 0 0 0 TPC_00077 4 10 7 4 0 0 0 0 TPC_00074 * 4 12 2 0 0 0 0 0 TPC_00079 * 4 3 0 0 0 0 0 0 TPC_00076 * 4 19 2 0 0 0 0 0 TPC_00081 ** 4 0 0 0 0 0 0 0 TPC_00083 ** 4 0 0 0 0 0 0 0 TPC_00085 ** 4 0 0 0 0 0 0 0 TPC_00087 3 2 0 0 0 0 0 0 TPC_00086 3 8 0 0 0 0 0 0 TPC_00084 * 4 20 1 0 0 0 0 0 TPC_00088 ** 3 0 0 0 0 0 0 0 TPC_00089 3 1 0 0 0 0 0 0 TPC_00091 ** 3 0 0 0 0 0 0 0 TPC_00092 ** 3 0 0 0 0 0 0 0 TPC_00090 3 2 0 0 0 0 0 0 TPC_00093 ** 3 0 0 0 0 0 0 0 TPC_00080 * 4 14 4 0 0 0 0 0 TPC_00096 3 4 0 0 0 0 0 0 TPC_00098 ** 2 0 0 0 0 0 0 0 TPC_00094 3 2 0 0 0 0 0 0 TPC_00099 ** 2 0 0 0 0 0 0 0 TPC_00100 2 2 0 0 0 0 0 0 TPC_00101 2 15 0 0 0 0 0 0 TPC_00102 ** 2 0 0 0 0 0 0 0 TPC_00097 ** 3 0 0 0 0 0 0 0 TPC_00082 4 2 16 3 0 0 0 0 TPC_00095 3 8 0 0 0 0 0 0
Matched point types for entire block:
#-fold matched used FBM LSM LSM-tracked: 2 2272 631 631 0 0 3 482 240 240 0 0 4 82 82 82 0 0 5 9 9 9 0 0
Tie Point Generator
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (9 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
-------------------
created 292 observations for photo 290 created 170 observations for photo 291 created 189 observations for photo 283 created 121 observations for photo 292 created 215 observations for photo 284 created 268 observations for photo 285 created 259 observations for photo 286 created 265 observations for photo 287 created 278 observations for photo 288 created 340 observations for photo 289
total of 2397 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 23.9 micron (09:52:24) sigma naught 12.2 micron (09:52:24) sigma naught 7.9 micron (09:52:25) sigma naught 6.5 micron (09:52:25) sigma naught 5.9 micron (09:52:26) sigma naught 5.4 micron (09:52:26) sigma naught 5.0 micron (09:52:27) sigma naught 4.7 micron (09:52:27) sigma naught 4.5 micron (09:52:27) sigma naught 4.3 micron (09:52:28) sigma naught 4.2 micron (09:52:28) sigma naught 4.1 micron (09:52:29) sigma naught 4.1 micron (09:52:29) sigma naught 4.9 micron (09:52:29)
found 575 points connecting 2 photos found 216 points connecting 3 photos found 55 points connecting 4 photos found 9 points connecting 5 photos
number of observations 4430 number of unknowns 2982 redundancy 1448
RMS automatic points in photo (number: 2140) x 3.6 micron y 1.8 micron
RMS control and manual points in photo (number: 42) x 6.4 micron
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (10 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
y 4.6 micron
RMS control points with default standard deviation set (number: 12) x 0.012 [meter] y 0.007 [meter]
RMS control points with default standard deviation set (number: 12) z 0.015 [meter]
RMS GNSS observations (number: 10) x 0.031 [meter] y 0.010 [meter] z 0.027 [meter]
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.033 0.003 A4 0.006 -0.015 C1 0.009 0.001 C4 0.008 0.006 E1 -0.003 0.002 E4 -0.002 -0.006 G1 0.010 0.002 G4 0.004 -0.010 I1 0.014 0.002 I4 0.008 -0.003 K1 -0.000 0.004 K4 0.003 -0.009
residuals vertical control points in [meter]
control point ID rz
A1 0.019 A4 0.018 C1 -0.005 C4 -0.006 E1 -0.018 E4 -0.021 G1 -0.020 G4 -0.022 I1 -0.011 I4 -0.013 K1 0.012 K4 0.008
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (11 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
residuals GNSS observations in [meter]
photo ID rx ry rz
283 -0.029 -0.012 -0.038 284 -0.042 -0.008 -0.028 285 0.014 -0.006 -0.017 286 -0.017 -0.013 -0.011 287 0.018 -0.015 -0.007 288 0.017 -0.012 -0.009 289 0.011 -0.008 -0.015 290 0.015 -0.009 -0.023 291 0.049 -0.006 -0.036 292 0.054 -0.007 -0.048
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
283 100.131 200.548 300.422 -1.3013 -3.9953 90.4733 284 100.328 200.552 300.432 -1.2792 -3.3367 90.8235 285 100.564 200.554 300.443 -1.2662 -2.2980 89.2255 286 100.753 200.547 300.449 -1.5092 -1.4720 90.4212 287 100.998 200.545 300.453 -1.7898 -0.6790 90.3013 288 101.387 200.548 300.451 -1.6796 0.8976 90.3579 289 101.612 200.552 300.445 -1.5892 1.7027 90.5161 290 101.795 200.551 300.437 -1.7499 2.4716 90.6961 291 102.019 200.554 300.424 -1.6635 3.2623 89.5065 292 102.204 200.553 300.412 -1.4783 4.0554 89.9833
Sigma naught : 4.9 [micron] = 0.2 [pixel]
Pyramid level 1 (pixel size 10 micron) started : Sat Feb 13 09:52:32 2010 ============================================================================
Perform LSM matching for 150 points using 5 threads
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (12 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
Tie Point Generator -------------------
created 46 observations for photo 290 created 32 observations for photo 291 created 39 observations for photo 283 created 19 observations for photo 292 created 50 observations for photo 284 created 57 observations for photo 285 created 66 observations for photo 286 created 53 observations for photo 287 created 57 observations for photo 288 created 51 observations for photo 289
total of 470 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 7.7 micron (09:52:37) sigma naught 4.1 micron (09:52:37) sigma naught 3.5 micron (09:52:38) sigma naught 3.2 micron (09:52:38) sigma naught 3.0 micron (09:52:39) sigma naught 2.9 micron (09:52:39) sigma naught 2.8 micron (09:52:39) sigma naught 2.7 micron (09:52:40) sigma naught 3.0 micron (09:52:40)
found 41 points connecting 2 photos found 43 points connecting 3 photos found 45 points connecting 4 photos found 10 points connecting 5 photos
number of observations 954 number of unknowns 486 redundancy 468
RMS automatic points in photo (number: 402) x 2.7 micron y 1.7 micron
RMS control and manual points in photo (number: 42) x 6.8 micron y 5.1 micron
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (13 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
RMS control points with default standard deviation set (number: 12) x 0.011 [meter] y 0.007 [meter]
RMS control points with default standard deviation set (number: 12) z 0.015 [meter]
RMS GNSS observations (number: 10) x 0.030 [meter] y 0.010 [meter] z 0.027 [meter]
standard deviations of exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg/1000] )
photo ID px py pz omega phi kappa
283 0.020 0.023 0.022 2322.5956 2431.2622 1779.3671 284 0.018 0.022 0.019 2320.1635 2420.0933 1769.5352 285 0.016 0.020 0.017 2364.8717 2371.7835 1767.7310 286 0.015 0.019 0.016 2320.9954 2429.3623 1778.7646 287 0.014 0.018 0.015 2322.2079 2435.4034 1786.4282 288 0.015 0.019 0.016 2321.5710 2425.3799 1783.1891 289 0.017 0.020 0.018 2321.6472 2419.8701 1782.6018 290 0.018 0.021 0.020 2321.5783 2412.2449 1779.3886 291 0.021 0.023 0.022 2365.9163 2381.4071 1796.6630 292 0.023 0.025 0.025 2328.5889 2438.0064 1812.3861
mean standard deviations of rotations omega 2331.0 [deg/1000] phi 2416.5 [deg/1000] kappa 1783.6 [deg/1000]
max standard deviations of rotations omega 2365.9 [deg/1000] at photo 291 phi 2438.0 [deg/1000] at photo 292 kappa 1812.4 [deg/1000] at photo 292
mean standard deviations of translations x 0.017 [meter] y 0.021 [meter] z 0.019 [meter]
max standard deviations of translations x 0.023 [meter] at photo 292 y 0.025 [meter] at photo 292 z 0.025 [meter] at photo 292
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (14 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.032 0.000 A4 0.006 -0.016 C1 0.009 0.001 C4 0.008 0.006 E1 -0.003 0.003 E4 -0.002 -0.006 G1 0.009 0.003 G4 0.003 -0.009 I1 0.012 0.002 I4 0.008 -0.003 K1 -0.001 0.002 K4 0.004 -0.009
residuals vertical control points in [meter]
control point ID rz
A1 0.017 A4 0.017 C1 -0.004 C4 -0.006 E1 -0.018 E4 -0.020 G1 -0.020 G4 -0.022 I1 -0.011 I4 -0.013 K1 0.012 K4 0.008
residuals GNSS observations in [meter]
photo ID rx ry rz
283 -0.029 -0.012 -0.039 284 -0.041 -0.008 -0.028 285 0.013 -0.006 -0.018 286 -0.018 -0.013 -0.011 287 0.019 -0.016 -0.006 288 0.017 -0.013 -0.009 289 0.012 -0.008 -0.015 290 0.014 -0.009 -0.023 291 0.049 -0.005 -0.036 292 0.053 -0.005 -0.047
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (15 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
mean standard deviations of terrain points x 0.016 [meter] y 0.016 [meter] z 0.019 [meter]
max standard deviations of terrain points x 0.022 [meter] at point 20000009 y 0.023 [meter] at point A1 z 0.031 [meter] at point 40000059
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
283 100.131 200.548 300.421 -1.3452 -3.9523 90.3901 284 100.329 200.552 300.432 -1.3262 -3.1989 90.6960 285 100.563 200.554 300.442 -1.3367 -2.4155 89.1972 286 100.752 200.547 300.449 -1.5480 -1.6183 90.4091 287 100.999 200.544 300.454 -1.7243 -0.5868 90.2237 288 101.387 200.547 300.451 -1.6381 0.9175 90.4877 289 101.613 200.552 300.445 -1.5768 1.7822 90.6271 290 101.794 200.551 300.437 -1.6675 2.4205 90.8394 291 102.019 200.555 300.424 -1.6250 3.2541 89.6425 292 102.203 200.555 300.413 -1.5027 3.9314 90.0955
==============================================================================
WARNING: Suspect standard deviation for orientation angle(s) (> 27.00000 [deg/1000]) in following photo(s): photo omega phi kappa
283 2322.59557 2431.26220 1779.36706 284 2320.16346 2420.09334 1769.53516 285 2364.87172 2371.78350 1767.73096 286 2320.99544 2429.36226 1778.76460 287 2322.20791 2435.40338 1786.42825 288 2321.57105 2425.37986 1783.18913 289 2321.64718 2419.87009 1782.60184 290 2321.57835 2412.24490 1779.38864 291 2365.91630 2381.40707 1796.66299 292 2328.58886 2438.00644 1812.38614
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (16 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
Sigma naught : 3.0 [micron] = 0.3 [pixel]
Pyramid level 0 (pixel size 5 micron) started : Sat Feb 13 09:52:43 2010 ============================================================================
Perform LSM matching for 117 points using 5 threads
Tie Point Generator -------------------
created 32 observations for photo 290 created 25 observations for photo 291 created 30 observations for photo 283 created 18 observations for photo 292 created 37 observations for photo 284 created 43 observations for photo 285 created 50 observations for photo 286 created 40 observations for photo 287 created 39 observations for photo 288 created 41 observations for photo 289
total of 355 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 88.5 micron (09:52:50) sigma naught 5.6 micron (09:52:50) sigma naught 4.7 micron (09:52:51) sigma naught 5.1 micron (09:52:51) sigma naught 5.2 micron (09:52:51) sigma naught 5.2 micron (09:52:52) sigma naught 5.8 micron (09:52:52)
found 27 points connecting 2 photos found 29 points connecting 3 photos found 36 points connecting 4 photos found 13 points connecting 5 photos
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (17 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
number of observations 763 number of unknowns 375 redundancy 388
RMS automatic points in photo (number: 308) x 3.1 micron y 2.2 micron
RMS control and manual points in photo (number: 42) x 4.5 micron y 4.2 micron
RMS control points with default standard deviation set (number: 12) x 0.010 [meter] y 0.008 [meter]
RMS control points with default standard deviation set (number: 12) z 0.013 [meter]
RMS GNSS observations (number: 9) x 0.026 [meter] y 0.010 [meter] z 0.023 [meter]
standard deviations of exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg/1000] )
photo ID px py pz omega phi kappa
283 0.003 0.003 0.003 309.8816 308.7920 284.3395 284 0.002 0.003 0.003 304.9670 301.4062 273.3236 285 0.002 0.003 0.002 298.5389 300.2075 256.2157 286 0.002 0.002 0.002 298.5747 299.0506 252.5452 287 0.002 0.002 0.002 298.4051 300.8901 252.7868 288 0.002 0.002 0.002 295.5141 305.3233 259.2127 289 0.002 0.003 0.002 299.6787 305.0283 266.8909 290 0.003 0.003 0.003 302.5595 309.7764 272.5462 291 0.003 0.003 0.003 318.4713 306.3493 291.3157 292 0.003 0.003 0.003 315.4883 326.8260 307.6406
mean standard deviations of rotations omega 304.2 [deg/1000] phi 306.4 [deg/1000] kappa 271.7 [deg/1000]
max standard deviations of rotations omega 318.5 [deg/1000] at photo 291 phi 326.8 [deg/1000] at photo 292
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (18 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
kappa 307.6 [deg/1000] at photo 292
mean standard deviations of translations x 0.002 [meter] y 0.003 [meter] z 0.003 [meter]
max standard deviations of translations x 0.003 [meter] at photo 292 y 0.003 [meter] at photo 292 z 0.003 [meter] at photo 292
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.029 0.000 A4 0.006 -0.019 C1 0.011 0.003 C4 0.007 0.005 E1 -0.003 0.006 E4 -0.003 -0.005 G1 0.008 0.007 G4 0.002 -0.008 I1 0.010 0.002 I4 0.007 -0.002 K1 -0.004 0.002 K4 0.003 -0.010
residuals vertical control points in [meter]
control point ID rz
A1 0.013 A4 0.013 C1 -0.004 C4 -0.006 E1 -0.015 E4 -0.017 G1 -0.016 G4 -0.019 I1 -0.009 I4 -0.010 K1 0.012 K4 0.010
residuals GNSS observations in [meter]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (19 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
photo ID rx ry rz
283 -0.025 -0.009 -0.035 284 -0.036 -0.006 -0.026 285 0.018 -0.005 -0.018 286 -0.015 -0.013 -0.012 287 0.022 -0.016 -0.009 288 0.018 -0.011 -0.012 289 0.012 -0.007 -0.018 290 0.014 -0.007 -0.025 291 0.048 -0.004 -0.037 292 0.054 -0.002 -0.049 eliminated
mean standard deviations of terrain points x 0.002 [meter] y 0.002 [meter] z 0.003 [meter]
max standard deviations of terrain points x 0.003 [meter] at point 20000009 y 0.003 [meter] at point 50000016 z 0.004 [meter] at point 20000009
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
283 100.135 200.551 300.425 -1.4445 -3.3553 90.1332 284 100.334 200.554 300.434 -1.4440 -2.6824 90.4821 285 100.568 200.555 300.442 -1.4520 -1.9018 88.9930 286 100.755 200.547 300.448 -1.6175 -1.2840 90.2798 287 101.002 200.544 300.451 -1.8408 -0.3714 90.1617 288 101.388 200.549 300.448 -1.8406 0.7913 90.5939 289 101.613 200.553 300.442 -1.7231 1.6310 90.7783 290 101.794 200.553 300.435 -1.8410 2.2685 90.9786 291 102.018 200.556 300.423 -1.7567 3.0180 89.7770 292 102.204 200.558 300.411 -1.7030 3.8495 90.2501
==============================================================================
WARNING: Suspect standard deviation for orientation angle(s) (> 27.00000 [deg/1000]) in following photo(s): photo omega phi kappa
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (20 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt
283 309.88157 308.79197 284.33954 284 304.96700 301.40617 273.32356 285 298.53893 300.20748 256.21572 286 298.57466 299.05056 252.54519 287 298.40512 300.89012 252.78676 288 295.51407 305.32325 259.21265 289 299.67874 305.02830 266.89088 290 302.55954 309.77644 272.54619 291 318.47125 306.34934 291.31573 292 315.48829 326.82604 307.64061
WARNING: Eliminated the following GNSS measurement(s) 292
Sigma naught : 5.8 [micron] = 1.2 [pixel]
End AAT computation : Sat Feb 13 09:52:54 2010 -------------------
C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe :Elapsed time = 0 hour 1 min. 2 sec. C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe :Elapsed time per image = 6.2 seconds
End C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe:
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatinicio..txt (21 de 21)13/01/2011 20:01:26

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
--------------------------------------------------------------------------- MATCH-AT [Version 5.2.1 (32bit)] build at Jul 16 2009 22:57:40
(c) INPHO GmbH Stuttgart 2008
Start AAT computation: Sat Feb 13 11:28:06 2010
Running 32 bit build on Microsoft Windows XP Professional Service Pack 3 (build 2600)
Windows 5.1.2600, 5 cores, 3.0 GBytes RAM---------------------------------------------------------------------------
Program was started as :
C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe -project D:\proyectos\final\final.prj
Parameters of the project : ===========================
Project : final Active Block : complete Block Number of photos : 10 Number of strips : 1
Photo scale : 1:114 Mean terrain height [m] : 300
Strategy parameter : --------------------
Overview # to start : 3 Overview # to stop : 0 # of pyramid levels to be processed : 4 # of tie points to be measured in last level : 3 Use manual measurements as TPC : ON Create numeric point id : ON TiePointCenterPattern : 4 x 4 TiePoint density : default Thinout size in pixel : 50 Try to track points from upper levels: : OFF Matching sequence : FBM FBM LSM LSM Number additional threads : 1 Cache size per thread : 10 MByte
Working directory : .\
Matching parameter : --------------------
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (1 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
FBM-Method:
Matching window : 100 x 100 Operator window size : 5 x 5 Non-max. suppr. window size : 5 Threshold for correlation coefficient : 0.92 Window for correlation coefficient : 5 x 5 Wmin : 0.10 Qmin (roundness) : 0.50 Parallax bound : 30 Epipolar line to be used : OFF Distance to epipolar lines : 0.50
LSM-Method:
Correlation coefficient : 0.93 Template size [pixel] : 21 Edge size [pixel] : 6 # of iterations : 20
Control parameter for block adjustment : ----------------------------------------
Selfcalibration : OFF GNSS-Mode : ON Drift-Mode : OFF IMU-Mode : OFF Earth's curvature correction : OFF Atmospheric correction : OFF Do not eliminate manual points : OFF
Standard deviations (a-priori) : --------------------------------
Ground control (planimetry) [m]
Set 0 (=default) : 0.050
Ground control (height) [m]
Set 0 (=default) : 0.050
Automatic image points [mm]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (2 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
Set 0 (=default) : 0.050
Image points of ground control and manual measurements [mm] : 0.050
GNSS X Y Z [m] : 0.100 0.100 0.100
Used Cameras in block: -----------------------
1 DSC_W80 Distortion : No correction GPS antenna eccentricity X Y Z [m] : 0.000 0.000 0.000
Pyramid level 3 (pixel size 40 micron) started : Sat Feb 13 11:28:11 2010 ============================================================================
Matching statistic: ------------------
Matched point types per tie point area:
* : weak connection ** : no tie points *** : no image overlap in tie point area
TPC-ID # photos 2x 3x 4x 5x 6x 7x >=8x
TPC_00002 2 2 0 0 0 0 0 0 TPC_00001 3 3 0 0 0 0 0 0 TPC_00005 3 13 1 0 0 0 0 0 TPC_00003 4 13 4 1 0 0 0 0 TPC_00006 3 6 0 0 0 0 0 0 TPC_00004 4 12 4 1 0 0 0 0 TPC_00007 4 17 3 1 0 0 0 0 TPC_00008 * 4 1 0 0 0 0 0 0 TPC_00011 3 14 4 0 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (3 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
TPC_00009 4 6 11 4 0 0 0 0 TPC_00012 3 13 4 0 0 0 0 0 TPC_00010 4 12 3 1 0 0 0 0 TPC_00013 * 5 13 4 0 0 0 0 0 TPC_00015 * 5 13 2 0 0 0 0 0 TPC_00014 * 5 6 2 0 0 0 0 0 TPC_00017 5 9 6 1 0 0 0 0 TPC_00016 * 5 2 0 0 0 0 0 0 TPC_00018 * 5 2 1 0 0 0 0 0 TPC_00021 * 4 2 2 0 0 0 0 0 TPC_00022 * 4 3 0 0 0 0 0 0 TPC_00019 * 5 14 7 0 0 0 0 0 TPC_00020 * 5 11 4 0 0 0 0 0 TPC_00023 4 7 3 1 0 0 0 0 TPC_00025 3 1 0 0 0 0 0 0 TPC_00026 3 2 0 0 0 0 0 0 TPC_00027 3 2 0 0 0 0 0 0 TPC_00024 * 4 5 1 0 0 0 0 0 TPC_00028 ** 3 0 0 0 0 0 0 0
Matched point types for entire block:
#-fold matched used FBM LSM LSM-tracked: 2 241 204 204 0 0 3 66 66 66 0 0 4 10 10 10 0 0
Tie Point Generator -------------------
created 79 observations for photo 540 created 88 observations for photo 541 created 106 observations for photo 542 created 76 observations for photo 543 created 39 observations for photo 535 created 39 observations for photo 544 created 55 observations for photo 536 created 53 observations for photo 537 created 91 observations for photo 538 created 58 observations for photo 539
total of 684 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 165.3 micron (11:28:15) sigma naught 241.6 micron (11:28:15) sigma naught 71.8 micron (11:28:16) sigma naught 28.1 micron (11:28:16) sigma naught 13.9 micron (11:28:17)
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (4 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
sigma naught 11.5 micron (11:28:17) sigma naught 10.3 micron (11:28:17) sigma naught 9.8 micron (11:28:18) sigma naught 9.4 micron (11:28:18) sigma naught 9.2 micron (11:28:19) sigma naught 11.1 micron (11:28:19)
found 202 points connecting 2 photos found 64 points connecting 3 photos found 10 points connecting 4 photos
number of observations 1370 number of unknowns 936 redundancy 434
RMS automatic points in photo (number: 614) x 7.0 micron y 2.8 micron
RMS control and manual points in photo (number: 38) x 24.3 micron y 62.1 micron
RMS control points with default standard deviation set (number: 12) x 0.042 [meter] y 0.041 [meter]
RMS control points with default standard deviation set (number: 12) z 0.045 [meter]
RMS GNSS observations (number: 10) x 0.074 [meter] y 0.024 [meter] z 0.042 [meter]
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.106 -0.007 A4 -0.032 0.033 C1 -0.031 -0.029 C4 0.010 0.029 E1 -0.006 -0.052
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (5 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
E4 0.037 -0.011 G1 0.034 -0.057 G4 0.036 -0.046 I1 0.045 0.054 I4 0.012 -0.020 K1 -0.013 0.073 K4 -0.037 -0.009
residuals vertical control points in [meter]
control point ID rz
A1 0.041 A4 0.041 C1 -0.011 C4 -0.012 E1 -0.060 E4 -0.061 G1 -0.081 G4 -0.038 I1 0.017 I4 0.008 K1 0.055 K4 0.044
residuals GNSS observations in [meter]
photo ID rx ry rz
535 -0.038 -0.053 -0.092 536 -0.088 -0.036 -0.068 537 -0.091 -0.021 -0.041 538 -0.108 -0.013 -0.011 539 -0.086 -0.000 0.014 540 0.003 0.005 0.025 541 -0.012 -0.000 0.013 542 0.036 -0.008 -0.002 543 0.073 -0.018 -0.019 544 0.109 -0.025 -0.040
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
535 100.122 200.507 300.368 -0.5942 -9.2506 93.5363 536 100.282 200.524 300.392 -0.6649 -8.5946 92.9136 537 100.459 200.539 300.419 -0.7867 -8.0987 93.0082
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (6 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
538 100.662 200.547 300.449 -0.8103 -7.4417 92.9171 539 100.864 200.560 300.474 -1.2374 -6.6404 93.0710 540 101.343 200.565 300.485 -1.2227 2.8789 86.7031 541 101.568 200.560 300.473 -1.2630 3.8142 86.5879 542 101.796 200.552 300.458 -1.1787 4.3863 86.6786 543 102.023 200.542 300.441 -0.9898 5.1694 86.7722 544 102.259 200.535 300.420 -0.8990 5.9260 87.0012
Sigma naught : 11.1 [micron] = 0.3 [pixel]
Pyramid level 2 (pixel size 20 micron) started : Sat Feb 13 11:28:22 2010 ============================================================================
Matching statistic: ------------------
Matched point types per tie point area:
* : weak connection ** : no tie points *** : no image overlap in tie point area
TPC-ID # photos 2x 3x 4x 5x 6x 7x >=8x
TPC_00001 3 2 0 0 0 0 0 0 TPC_00002 2 5 0 0 0 0 0 0 TPC_00006 3 5 0 0 0 0 0 0 TPC_00005 3 19 2 0 0 0 0 0 TPC_00003 4 8 10 3 0 0 0 0 TPC_00008 * 4 4 0 0 0 0 0 0 TPC_00007 * 4 16 5 0 0 0 0 0 TPC_00011 3 15 6 0 0 0 0 0 TPC_00009 4 0 13 8 0 0 0 0 TPC_00004 * 4 14 7 0 0 0 0 0 TPC_00012 3 8 1 0 0 0 0 0 TPC_00013 * 7 5 0 0 0 0 0 0 TPC_00014 * 7 3 0 0 0 0 0 0 TPC_00010 * 4 11 1 0 0 0 0 0 TPC_00016 * 7 9 1 0 0 0 0 0 TPC_00017 * 7 7 1 0 0 0 0 0 TPC_00019 * 6 1 0 0 0 0 0 0 TPC_00022 * 6 1 0 0 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (7 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
TPC_00015 * 7 21 0 0 0 0 0 0 TPC_00021 * 6 1 0 0 0 0 0 0 TPC_00020 * 6 15 6 0 0 0 0 0 TPC_00018 * 6 15 6 0 0 0 0 0 TPC_00025 ** 6 0 0 0 0 0 0 0 TPC_00027 ** 6 0 0 0 0 0 0 0 TPC_00029 ** 6 0 0 0 0 0 0 0 TPC_00023 6 8 8 5 0 0 0 0 TPC_00028 6 11 5 2 0 0 0 0 TPC_00024 * 6 20 1 0 0 0 0 0 TPC_00030 ** 6 0 0 0 0 0 0 0 TPC_00026 6 0 11 10 0 0 0 0 TPC_00032 ** 6 0 0 0 0 0 0 0 TPC_00031 6 8 6 7 0 0 0 0 TPC_00035 * 6 4 0 0 0 0 0 0 TPC_00038 * 6 4 0 0 0 0 0 0 TPC_00034 * 6 1 0 0 0 0 0 0 TPC_00037 6 6 11 4 0 0 0 0 TPC_00039 * 6 12 1 0 0 0 0 0 TPC_00040 * 6 1 0 0 0 0 0 0 TPC_00036 * 6 21 0 0 0 0 0 0 TPC_00041 6 13 6 2 0 0 0 0 TPC_00044 5 8 4 1 0 0 0 0 TPC_00033 * 6 16 5 0 0 0 0 0 TPC_00042 * 6 18 1 0 0 0 0 0 TPC_00046 * 5 4 0 0 0 0 0 0 TPC_00043 5 0 12 9 0 0 0 0 TPC_00045 * 5 13 8 0 0 0 0 0 TPC_00050 5 11 5 2 0 0 0 0 TPC_00047 * 5 13 8 0 0 0 0 0 TPC_00051 ** 5 0 0 0 0 0 0 0 TPC_00052 ** 5 0 0 0 0 0 0 0 TPC_00053 * 5 1 0 0 0 0 0 0 TPC_00048 5 0 8 13 0 0 0 0 TPC_00049 * 5 4 17 0 0 0 0 0 TPC_00057 * 5 1 0 0 0 0 0 0 TPC_00055 * 5 6 5 0 0 0 0 0 TPC_00058 5 8 6 7 0 0 0 0 TPC_00060 ** 5 0 0 0 0 0 0 0 TPC_00061 ** 5 0 0 0 0 0 0 0 TPC_00059 * 5 4 0 0 0 0 0 0 TPC_00054 5 0 8 13 0 0 0 0 TPC_00062 5 0 8 13 0 0 0 0 TPC_00063 * 5 19 2 0 0 0 0 0 TPC_00056 5 7 9 5 0 0 0 0 TPC_00064 * 5 12 9 0 0 0 0 0 TPC_00065 * 4 9 4 0 0 0 0 0 TPC_00067 * 4 18 1 0 0 0 0 0 TPC_00068 * 4 4 0 0 0 0 0 0 TPC_00070 ** 4 0 0 0 0 0 0 0 TPC_00071 * 4 2 0 0 0 0 0 0
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (8 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
TPC_00069 4 0 20 1 0 0 0 0 TPC_00074 ** 4 0 0 0 0 0 0 0 TPC_00066 4 9 9 3 0 0 0 0 TPC_00072 * 4 13 1 0 0 0 0 0 TPC_00077 ** 4 0 0 0 0 0 0 0 TPC_00075 4 13 6 2 0 0 0 0 TPC_00078 ** 4 0 0 0 0 0 0 0 TPC_00073 * 4 8 1 0 0 0 0 0 TPC_00080 ** 4 0 0 0 0 0 0 0 TPC_00079 4 8 10 3 0 0 0 0 TPC_00081 3 13 0 0 0 0 0 0 TPC_00083 ** 3 0 0 0 0 0 0 0 TPC_00082 3 3 0 0 0 0 0 0 TPC_00084 3 1 0 0 0 0 0 0 TPC_00085 3 2 0 0 0 0 0 0 TPC_00087 ** 3 0 0 0 0 0 0 0 TPC_00076 * 4 19 2 0 0 0 0 0 TPC_00086 ** 3 0 0 0 0 0 0 0 TPC_00092 ** 2 0 0 0 0 0 0 0 TPC_00091 ** 2 0 0 0 0 0 0 0 TPC_00089 3 2 0 0 0 0 0 0 TPC_00093 ** 2 0 0 0 0 0 0 0 TPC_00090 ** 3 0 0 0 0 0 0 0 TPC_00094 2 3 0 0 0 0 0 0 TPC_00088 3 7 1 0 0 0 0 0
Matched point types for entire block:
#-fold matched used FBM LSM LSM-tracked: 2 2207 573 573 0 0 3 539 278 278 0 0 4 113 113 113 0 0
Tie Point Generator -------------------
created 317 observations for photo 540 created 353 observations for photo 541 created 302 observations for photo 542 created 284 observations for photo 543 created 205 observations for photo 535 created 152 observations for photo 544 created 248 observations for photo 536 created 151 observations for photo 537 created 255 observations for photo 538 created 203 observations for photo 539
total of 2470 measurements in 10 photos are used for adjustment (total 10 photos)
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (9 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
sigma naught 23.1 micron (11:28:35) sigma naught 12.9 micron (11:28:35) sigma naught 7.6 micron (11:28:36) sigma naught 6.3 micron (11:28:36) sigma naught 5.7 micron (11:28:36) sigma naught 5.2 micron (11:28:37) sigma naught 4.9 micron (11:28:37) sigma naught 4.7 micron (11:28:38) sigma naught 4.6 micron (11:28:38) sigma naught 4.5 micron (11:28:38) sigma naught 4.4 micron (11:28:39) sigma naught 5.3 micron (11:28:39)
found 555 points connecting 2 photos found 248 points connecting 3 photos found 102 points connecting 4 photos
number of observations 4732 number of unknowns 2988 redundancy 1744
RMS automatic points in photo (number: 2295) x 3.8 micron y 2.3 micron
RMS control and manual points in photo (number: 38) x 18.7 micron y 61.8 micron
RMS control points with default standard deviation set (number: 12) x 0.028 [meter] y 0.027 [meter]
RMS control points with default standard deviation set (number: 12) z 0.029 [meter]
RMS GNSS observations (number: 10) x 0.046 [meter] y 0.014 [meter] z 0.026 [meter]
residuals horizontal control points in [meter]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (10 de 21)13/01/2011 20:01:27
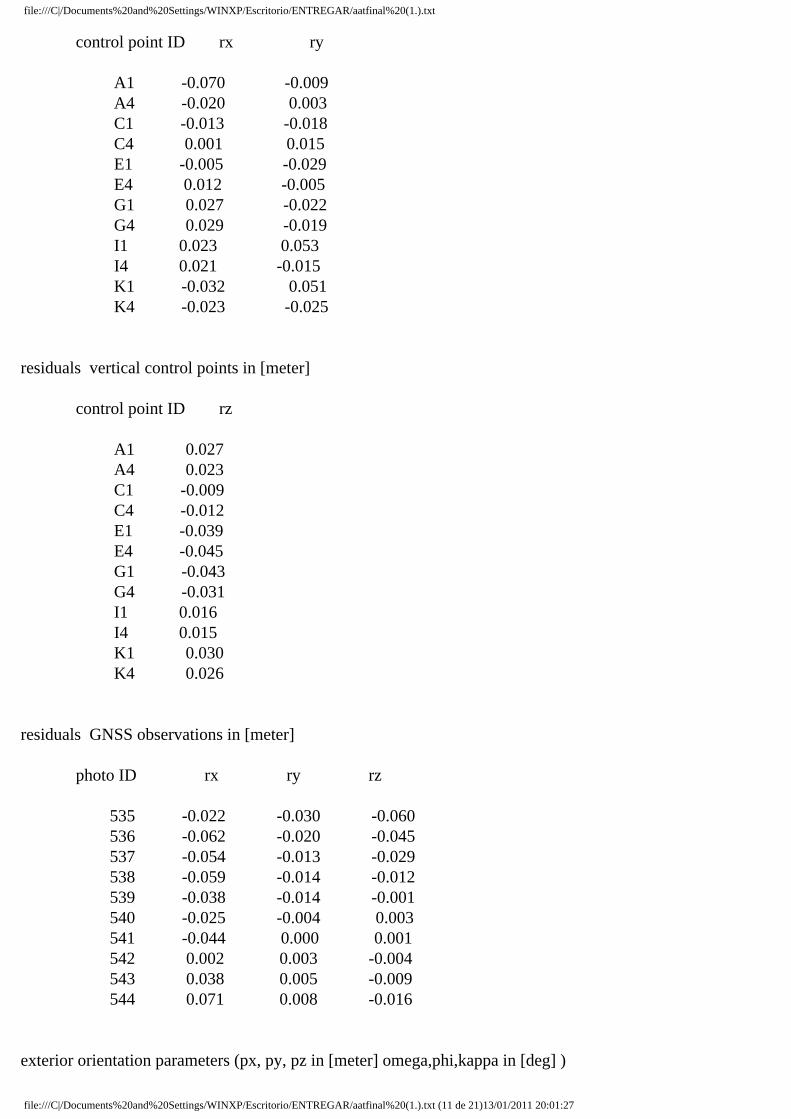
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
control point ID rx ry
A1 -0.070 -0.009 A4 -0.020 0.003 C1 -0.013 -0.018 C4 0.001 0.015 E1 -0.005 -0.029 E4 0.012 -0.005 G1 0.027 -0.022 G4 0.029 -0.019 I1 0.023 0.053 I4 0.021 -0.015 K1 -0.032 0.051 K4 -0.023 -0.025
residuals vertical control points in [meter]
control point ID rz
A1 0.027 A4 0.023 C1 -0.009 C4 -0.012 E1 -0.039 E4 -0.045 G1 -0.043 G4 -0.031 I1 0.016 I4 0.015 K1 0.030 K4 0.026
residuals GNSS observations in [meter]
photo ID rx ry rz
535 -0.022 -0.030 -0.060 536 -0.062 -0.020 -0.045 537 -0.054 -0.013 -0.029 538 -0.059 -0.014 -0.012 539 -0.038 -0.014 -0.001 540 -0.025 -0.004 0.003 541 -0.044 0.000 0.001 542 0.002 0.003 -0.004 543 0.038 0.005 -0.009 544 0.071 0.008 -0.016
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] )
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (11 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
535 100.138 200.530 300.400 -0.9154 -5.7437 90.8451 536 100.308 200.540 300.415 -1.0185 -5.0547 90.2035 537 100.496 200.547 300.431 -1.0869 -4.3427 90.3510 538 100.711 200.546 300.448 -1.1777 -3.4717 90.1308 539 100.912 200.546 300.459 -1.4021 -3.0928 90.7192 540 101.315 200.556 300.463 -1.9089 -0.0364 89.1466 541 101.536 200.560 300.461 -2.0396 0.6260 89.1351 542 101.762 200.563 300.456 -2.0563 1.2388 89.2530 543 101.988 200.565 300.451 -2.0289 2.0400 89.3480 544 102.221 200.568 300.444 -1.8351 2.7369 89.6582
Sigma naught : 5.3 [micron] = 0.3 [pixel]
Pyramid level 1 (pixel size 10 micron) started : Sat Feb 13 11:28:42 2010 ============================================================================
Perform LSM matching for 144 points using 5 threads
Tie Point Generator -------------------
created 43 observations for photo 540 created 48 observations for photo 541 created 50 observations for photo 542 created 41 observations for photo 543 created 40 observations for photo 535 created 27 observations for photo 544 created 47 observations for photo 536 created 41 observations for photo 537 created 45 observations for photo 538 created 39 observations for photo 539
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (12 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
total of 421 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 11.4 micron (11:28:47) sigma naught 4.5 micron (11:28:47) sigma naught 3.7 micron (11:28:48) sigma naught 3.2 micron (11:28:48) sigma naught 3.0 micron (11:28:48) sigma naught 2.9 micron (11:28:49) sigma naught 2.8 micron (11:28:49) sigma naught 3.1 micron (11:28:49)
found 40 points connecting 2 photos found 40 points connecting 3 photos found 34 points connecting 4 photos found 12 points connecting 5 photos
number of observations 862 number of unknowns 444 redundancy 418
RMS automatic points in photo (number: 360) x 2.3 micron y 1.9 micron
RMS control and manual points in photo (number: 38) x 14.7 micron y 64.2 micron
RMS control points with default standard deviation set (number: 12) x 0.031 [meter] y 0.028 [meter]
RMS control points with default standard deviation set (number: 12) z 0.030 [meter]
RMS GNSS observations (number: 10) x 0.049 [meter] y 0.015 [meter] z 0.028 [meter]
standard deviations of exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg/1000] )
photo ID px py pz omega phi kappa
535 0.020 0.023 0.022 2278.5045 2287.1897 1872.1141 536 0.018 0.021 0.020 2235.8673 2351.7668 1889.0271
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (13 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
537 0.017 0.020 0.018 2279.5360 2301.8049 1881.4748 538 0.015 0.019 0.016 2278.4988 2304.5999 1882.3786 539 0.015 0.019 0.016 2273.0855 2282.5069 1859.2596 540 0.015 0.019 0.017 2228.4270 2336.5642 1867.7092 541 0.017 0.021 0.018 2227.5478 2334.3921 1866.0923 542 0.019 0.022 0.021 2227.9657 2336.1177 1869.0436 543 0.021 0.025 0.024 2228.5197 2337.2076 1872.2055 544 0.024 0.027 0.027 2230.4222 2343.1035 1880.7904
mean standard deviations of rotations omega 2248.8 [deg/1000] phi 2321.5 [deg/1000] kappa 1874.0 [deg/1000]
max standard deviations of rotations omega 2279.5 [deg/1000] at photo 537 phi 2351.8 [deg/1000] at photo 536 kappa 1889.0 [deg/1000] at photo 536
mean standard deviations of translations x 0.018 [meter] y 0.022 [meter] z 0.020 [meter]
max standard deviations of translations x 0.024 [meter] at photo 544 y 0.027 [meter] at photo 544 z 0.027 [meter] at photo 544
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.072 -0.012 A4 -0.026 0.003 C1 -0.013 -0.020 C4 -0.001 0.017 E1 -0.003 -0.029 E4 0.014 -0.002 G1 0.030 -0.019 G4 0.034 -0.017 I1 0.023 0.056 I4 0.025 -0.018 K1 -0.036 0.053 K4 -0.025 -0.029
residuals vertical control points in [meter]
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (14 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
control point ID rz
A1 0.028 A4 0.023 C1 -0.010 C4 -0.012 E1 -0.040 E4 -0.048 G1 -0.044 G4 -0.034 I1 0.017 I4 0.016 K1 0.032 K4 0.029
residuals GNSS observations in [meter]
photo ID rx ry rz
535 -0.019 -0.029 -0.064 536 -0.061 -0.021 -0.048 537 -0.054 -0.015 -0.031 538 -0.062 -0.015 -0.014 539 -0.043 -0.015 -0.003 540 -0.032 -0.004 0.005 541 -0.048 0.001 0.004 542 0.002 0.005 0.001 543 0.040 0.008 -0.005 544 0.078 0.012 -0.014
mean standard deviations of terrain points x 0.017 [meter] y 0.018 [meter] z 0.020 [meter]
max standard deviations of terrain points x 0.023 [meter] at point 20000012 y 0.024 [meter] at point A1 z 0.034 [meter] at point 50000059
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
535 100.141 200.531 300.396 -1.0563 -5.9696 90.5524
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (15 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
536 100.309 200.539 300.412 -1.0602 -5.2923 89.9429 537 100.496 200.545 300.429 -1.1063 -4.5297 90.1078 538 100.708 200.545 300.446 -1.2820 -3.7175 90.0133 539 100.907 200.545 300.457 -1.5948 -3.4115 90.6945 540 101.308 200.556 300.465 -1.9579 -0.1889 89.4695 541 101.532 200.561 300.464 -1.9580 0.5799 89.4298 542 101.762 200.565 300.461 -1.9620 1.2807 89.4884 543 101.990 200.568 300.455 -1.9631 2.1422 89.5326 544 102.228 200.572 300.446 -1.8869 2.9694 89.7213
==============================================================================
WARNING: Suspect orientation angle(s) (> 4.50000 [deg]) in following photo(s): photo omega phi kappa
535 -1.05634 -5.96958 90.55242 536 -1.06025 -5.29229 89.94289 537 -1.10632 -4.52975 90.10784
WARNING: Suspect standard deviation for orientation angle(s) (> 27.00000 [deg/1000]) in following photo(s): photo omega phi kappa
535 2278.50453 2287.18972 1872.11408 536 2235.86731 2351.76678 1889.02713 537 2279.53601 2301.80490 1881.47477 538 2278.49876 2304.59989 1882.37860 539 2273.08553 2282.50691 1859.25960 540 2228.42704 2336.56419 1867.70924 541 2227.54783 2334.39207 1866.09230 542 2227.96571 2336.11766 1869.04364 543 2228.51970 2337.20763 1872.20548 544 2230.42225 2343.10353 1880.79036
Sigma naught : 3.1 [micron] = 0.3 [pixel]
Pyramid level 0 (pixel size 5 micron) started : Sat Feb 13 11:28:53 2010 ============================================================================
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (16 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
Perform LSM matching for 108 points using 5 threads
Tie Point Generator -------------------
created 32 observations for photo 540 created 36 observations for photo 541 created 36 observations for photo 542 created 30 observations for photo 543 created 33 observations for photo 535 created 21 observations for photo 544 created 41 observations for photo 536 created 31 observations for photo 537 created 39 observations for photo 538 created 25 observations for photo 539
total of 324 measurements in 10 photos are used for adjustment (total 10 photos)
sigma naught 185.2 micron (11:28:59) sigma naught 30.4 micron (11:28:59) sigma naught 6.4 micron (11:29:00) sigma naught 5.4 micron (11:29:00) sigma naught 5.5 micron (11:29:01) sigma naught 5.5 micron (11:29:01) sigma naught 6.2 micron (11:29:01)
found 33 points connecting 2 photos found 29 points connecting 3 photos found 25 points connecting 4 photos found 13 points connecting 5 photos
number of observations 702 number of unknowns 360 redundancy 342
RMS automatic points in photo (number: 280) x 3.4 micron y 2.1 micron
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (17 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
RMS control and manual points in photo (number: 38) x 5.6 micron y 5.1 micron
RMS control points with default standard deviation set (number: 12) x 0.009 [meter] y 0.008 [meter]
RMS control points with default standard deviation set (number: 12) z 0.010 [meter]
RMS GNSS observations (number: 10) x 0.026 [meter] y 0.010 [meter] z 0.024 [meter]
standard deviations of exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg/1000] )
photo ID px py pz omega phi kappa
535 0.003 0.003 0.003 343.2694 391.0991 328.5505 536 0.003 0.003 0.003 337.8962 387.9191 318.4886 537 0.003 0.003 0.003 337.6264 387.5327 309.3097 538 0.003 0.003 0.002 335.1465 383.4382 302.9325 539 0.003 0.003 0.003 340.7032 385.9642 302.2423 540 0.003 0.003 0.002 350.4840 385.5428 322.6514 541 0.003 0.003 0.003 350.5877 384.3766 330.1754 542 0.003 0.003 0.003 356.4535 383.8934 338.0219 543 0.003 0.003 0.003 365.6510 386.5435 360.1191 544 0.004 0.004 0.004 370.7511 390.8294 385.3054
mean standard deviations of rotations omega 348.9 [deg/1000] phi 386.7 [deg/1000] kappa 329.8 [deg/1000]
max standard deviations of rotations omega 370.8 [deg/1000] at photo 544 phi 391.1 [deg/1000] at photo 535 kappa 385.3 [deg/1000] at photo 544
mean standard deviations of translations x 0.003 [meter] y 0.003 [meter] z 0.003 [meter]
max standard deviations of translations x 0.004 [meter] at photo 544 y 0.004 [meter] at photo 544 z 0.004 [meter] at photo 544
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (18 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
residuals horizontal control points in [meter]
control point ID rx ry
A1 -0.027 -0.001 A4 0.003 -0.021 C1 0.009 0.002 C4 0.005 0.004 E1 -0.006 0.006 E4 -0.008 -0.005 G1 0.005 0.008 G4 0.002 -0.005 I1 0.005 0.002 I4 0.005 -0.001 K1 -0.006 0.000 K4 0.003 -0.012
residuals vertical control points in [meter]
control point ID rz
A1 0.007 A4 0.008 C1 -0.009 C4 -0.005 E1 -0.014 E4 -0.010 G1 -0.009 G4 -0.016 I1 -0.008 I4 -0.014 K1 0.011 K4 0.002
residuals GNSS observations in [meter]
photo ID rx ry rz
535 -0.017 -0.007 -0.032 536 -0.047 -0.004 -0.026 537 -0.029 -0.003 -0.020 538 -0.025 -0.010 -0.016 539 0.019 -0.016 -0.016 540 0.020 -0.018 -0.013 541 -0.019 -0.013 -0.015 542 0.008 -0.009 -0.021
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (19 de 21)13/01/2011 20:01:27

file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
543 0.022 -0.007 -0.029 544 0.033 -0.003 -0.039
mean standard deviations of terrain points x 0.002 [meter] y 0.003 [meter] z 0.003 [meter]
max standard deviations of terrain points x 0.004 [meter] at point 20000007 y 0.004 [meter] at point 20000007 z 0.005 [meter] at point 30000008
exterior orientation parameters (px, py, pz in [meter] omega,phi,kappa in [deg] ) rotations from terrain to photo (rotated axes)
photo ID px py pz omega phi kappa
535 100.143 200.553 300.428 -1.9206 -2.3866 88.9343 536 100.323 200.556 300.434 -1.8784 -1.6956 88.3350 537 100.521 200.557 300.440 -1.9088 -0.9651 88.5300 538 100.745 200.550 300.444 -2.0535 -0.2059 88.5172 539 100.969 200.544 300.444 -2.2747 0.6877 88.7035 540 101.360 200.542 300.447 -1.4276 0.4365 89.5426 541 101.561 200.547 300.445 -1.4383 1.2477 89.4744 542 101.768 200.551 300.439 -1.5030 2.0059 89.5031 543 101.972 200.553 300.431 -1.4232 2.8445 89.5440 544 102.183 200.557 300.421 -1.3676 3.5727 89.7151
==============================================================================
WARNING: Suspect standard deviation for orientation angle(s) (> 27.00000 [deg/1000]) in following photo(s): photo omega phi kappa
535 343.26937 391.09909 328.55052 536 337.89617 387.91906 318.48863 537 337.62638 387.53275 309.30972 538 335.14655 383.43818 302.93246 539 340.70316 385.96425 302.24230 540 350.48404 385.54284 322.65136 541 350.58771 384.37657 330.17536 542 356.45347 383.89343 338.02193 543 365.65101 386.54354 360.11912 544 370.75111 390.82938 385.30536
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (20 de 21)13/01/2011 20:01:27
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt
Sigma naught : 6.2 [micron] = 1.2 [pixel]
End AAT computation : Sat Feb 13 11:29:03 2010 -------------------
C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe :Elapsed time = 0 hour 0 min. 57 sec. C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe :Elapsed time per image = 5.7 seconds
End C:\Archivos de programa\Inpho\ApplicationsMaster 5.2\bin\aat.exe:
file:///C|/Documents%20and%20Settings/WINXP/Escritorio/ENTREGAR/aatfinal%20(1.).txt (21 de 21)13/01/2011 20:01:27































