Embed Size (px)
Citation preview
Università degli studi di Cassino – relazione finale corso di fondamenti di automatica
ElaboratoJ
Relazione diFondamenti di automatica
Docente del corso:Stefano Chiaverini
Riccardo Galletti
Matr. 1265

- 2 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis
- 3 -
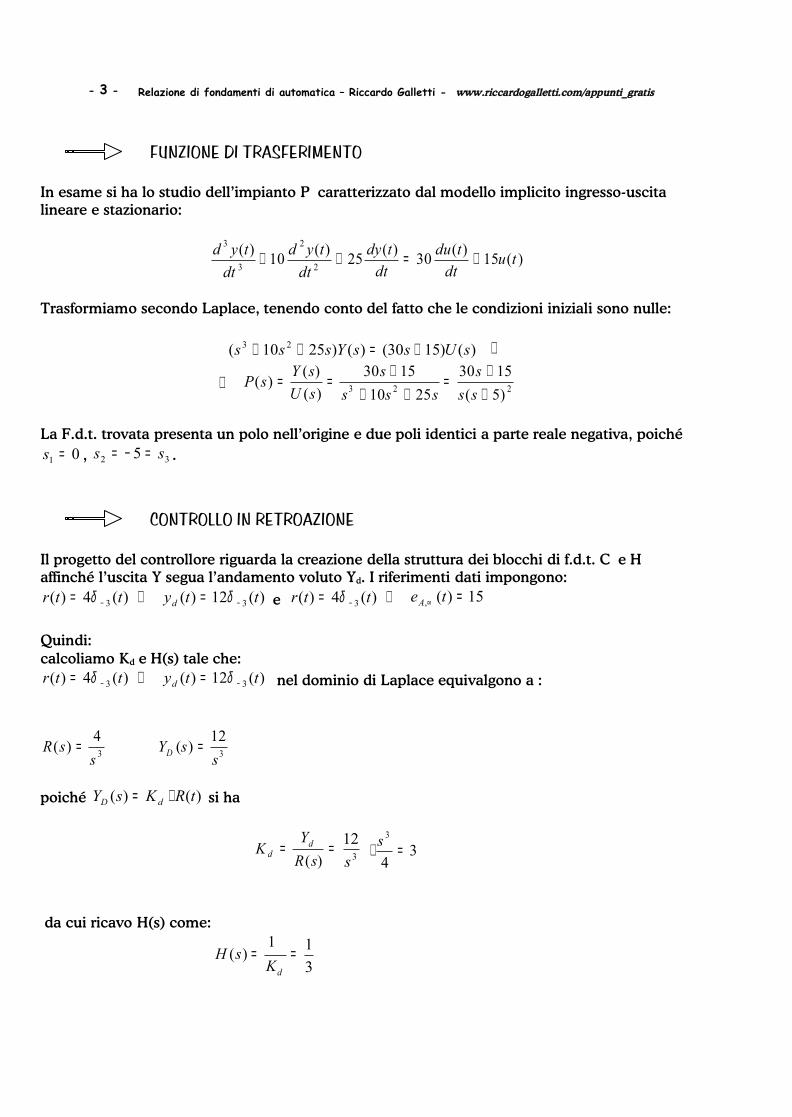
FUNZIONE DI TRASFERIMENTO
In esame si ha lo studio dell’impianto P caratterizzato dal modello implicito ingresso-uscita lineare e stazionario:
)(15)(30)(25)(10)(2
2
3
3
tudttdu
dttdy
dttyd
dttyd +=++
Trasformiamo secondo Laplace, tenendo conto del fatto che le condizioni iniziali sono nulle:
)()1530()()2510( 23 sUssYsss +=++ ⇒
⇒ 223 )5(1530
25101530
)()(
)(+
+=
+++
==sss
ssss
sUsY
sP
La F.d.t. trovata presenta un polo nell’origine e due poli identici a parte reale negativa, poiché 01 =s , 32 5 ss =−= .
CONTROLLO IN RETROAZIONE
Il progetto del controllore riguarda la creazione della struttura dei blocchi di f.d.t. C e H affinché l’uscita Y segua l’andamento voluto Yd. I riferimenti dati impongono:
)(4)( 3 ttr −= δ ⇒ )(12)( 3 ttyd −= δ e )(4)( 3 ttr −= δ ⇒ 15)(, =∞ teA
Quindi: calcoliamo Kd e H(s) tale che:
)(4)( 3 ttr −= δ ⇒ )(12)( 3 ttyd −= δ nel dominio di Laplace equivalgono a :
34
)(s
sR = 312
)(s
sYD =
poiché )()( tRKsY dD ⋅= si ha
==)(sR
YK dd 3
12s
34
3
=⋅ s
da cui ricavo H(s) come:
==dK
sH1
)(31
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 4 -
La seconda specifica può essere soddisfatta con diverse scelte del controllore. Esse sono:A) Introduzione di poli nell’origine;B) Attribuzione di un opportuno guadagno di Bode Kc;
Calcoliamo quindi C(s) tale che )(4)( 3 ttr −= δ 15)(, =⇒ ∞ teA :Per avere un errore a regime finito occorre avere l’uguaglianza: hk =dove k indica l’ordine (diminuito di 1 unità) del riferimento, mentre h è il numero dei poli nell’origine nella G(s), ossia la F.d.T di catena diretta.Nel nostro caso abbiamo:k=2, cioè abbiamo come riferimento una rampa parabolica, e dobbiamo avere h=2.Dato che l’impianto già possiede un polo nell’origine, dobbiamo inserirne uno nel controllore C(s), che quindi assumerà una struttura del tipo:
sK
sC c=)(
15)(, =∞ teA ma dato che aa
dA KK
RKte
43)(
20
2
,⋅
=⋅
=∞ si ha 4.21536
==aK ; inoltre essendo
2515
2515
)5(1530
lim)(lim 22
0
2
0 ccc
sasa KKsss
sK
sKsGsK ==+
+=⇒⋅=
→
⋅
→
cioè 4.253
=cK ⇒ 4=cK
Per vedere se il sistema a ciclo chiuso è astatico nei confronti di )()( 1 ttd −= δ , (gradino
unitario), devo verificare la seguente disuguaglianza: kh >1 , dove h1 sta ad indicare il numero dei poli dell’origine di C(s) e k è l’ordine, diminuito di un’unità, dell’ingresso non manipolabile.Dunque:
14
)( 11=→== h
ssK
sC hc 0
1)( 1
0 =→== + kss
DsD k
Quindi è verificata la relazione kh >1 che rende il sistema astatico nei confronti di d(t).
PROPRIETA’ DI STABILITA’
Per l’analisi della stabilità del sistema è necessario conoscere i poli della f.d.t. a ciclo chiuso, pari a:
)()()(1)()(
)(1)(
)(sHsPsC
sPsCsFsGsW
⋅⋅+⋅
=+
=
Occorre dunque analizzare le radici dell’equazione:
2)5(1530
31
1)()()(1)(1+
+⋅⋅+=⋅⋅+=+sss
sK
sHsPsCsF c
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 5 -
Tali radici si ricavano risolvendo l’equazione: 0)1530)2510(30)1530()5(30)](1[ 2222 =++++⇒=+⋅++↔=+ ccc KsKssssKsssFnumcioè 0153075303 234 =++++ cc KsKsss
Se e solo se tutti i poli della f. d. t. ad anello chiuso hanno parte reale strettamente negativa il sistema è asintoticamente stabile in quanto la risposta in transitorio tende a 0 nel tempo.Il criterio che mi permette di dterminare, in modo semplice quanto veloce, il segno dei poli senza risolvere l’equazione è il criterio di Routh.In particolare, condizione necessaria e sufficiente affinchè un sistema lineare e stazionario sia asinntoticamente stabile è che gli elementi della prima colonna della tabella di Routh associata al polinomio caratteristico siano tutti dello stesso segno.Costruiamo, a questo punto, la tabella di Routh:
4
3
2
1
0
3
30
c
d
e
75
30 Kc
c’
0
0
15 Kc
0
0
0
0
Ricaviamo c, c’, d, e :
det301
⋅−=c cK3030
753 c
c KK
37530
902250−=
−=
det301
' ⋅−=c 030153 cK cK15=
det1
⋅−=c
d '3030ccK c det
3751
⋅−
−=cK
cc
c
KKK
153753030
−
c
cc
c
ccc
KK
KK
KKK−
−=−
−−⋅=
25150
30375
450)375(30
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 6 -
det1
⋅−=d
e 0'
dcc
cKc 15' ==
Per la condizione imposta sulla stabilità otteniamo il sistema:
0375 >− cK
0
25150
30 >−
−c
cc K
KK
015 >cK
Dato che 25-Kc>0, basta imporre che 015030750 2 >−− ccc KKK cioè che 0)30600( >− cc KK ,
cioè 0)30600( >− cK .In sintesi, condizione per avere asintotica stabilità sul sistema a ciclo chiuso è che
200 << cK
Essendo Kc pari a 4 e dunque appartenente all’intervallo [0,20], possiamo affermare che il nostro sistema è asintoticamente stabile.
Per avere un riscontro dei risultati ottenuti, ai fini della stabilità del sistema, si ricorre ad un metodo di indagine basato sulla conoscenza della f.d.t di anello F(s): il criterio di Nyquist.
Secondo tale metodo condizione necessaria e sufficiente per garantire l’asintotica stabilità del sistema a ciclo chiuso è che il diagramma di Nyquist completo della F(jω) circondi il punto critico (-1, j0), senza toccarlo, un numero di volte pari al numero di poli a parte reale strettamente positiva della F(s). Il numero dei circondamenti è contato positivamente in senso antiorario, negativamente in senso orario.
Nel nostro caso 2)5(1530
31
)()()()(++
⋅⋅=⋅⋅=sss
sK
sHsPsCsF c possiamo vedere che non ha poli a
parte reale positiva, ma ha un polo nell’origine con molteplicità 2.
25<cK
0
25150
30 >−
−c
cc K
KK
0>cK
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 7 -
Tracciamo il diagramma di Nyquist con Kc =4;
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Nyquist Diagram
Real Axis
Imagin
ary
Axis
Come potevamo aspettarci, in prossimità della pulsazione 0=ω abbiamo una singolarità nell’applicazione del suddetto criterio. Sfruttando il diagramma ottenuto in Matlab e tenendo
conto che 2234 )()(
~
)(25)(10)(2040)(
ωω
ωωωωω
jjF
jjjjjF =
+++= e che 0)(~lim
0=∠
→ω
ωjF
Si ha: πωω
−=∠+→
)(lim0
jF e πωω
+=∠−→
)(lim0
jF
Si nota dunque che per ω tendente a 0+ il diagramma di Nyquist tende asintoticamente al semiasse reale negativo, e per ω tendente a 0 - tende asintoticamente al semiasse reale >0.
e dunque, chiudendo il grafico con due mezzi giri orari da 0- a 0+ il numero dei circondamenti del punto critico rimane pari a zero. Essendo zero il numero dei poli a parte reale >0 di F(s) (si ricorda che l’aggiramento in senso antiorario nel dominio ci fa considerare, ai fini dell’applicazione del criterio di Nyquist, il polo nell’origine come polo a
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis
-0.22 -0.2 -0.18 -0.16 -0.14 -0.12 -0.1 -0.08 -0.06 -0.04 -0.02-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
+ ∞
− ∞
0
0+
−
-15 -10 -5 0
x 104
-6000
-4000
-2000
0
2000
4000
6000Nyquist Diagram
Real Axis
Imag
inar
y A
xis

- 8 -
parte reale negativa), il criterio di Nyquist è verificato.
Dato che il diagramma di Nyquist interseca l’asse negativa dei reali in corrispondenza di -0.1978, siamo in presenza di una stabilità regolare, assicurata per valori del guadagno
d’anello aperto 06.51978.01~ =<K . Ciò significa che posso moltiplicare Kc =4 al massimo per
5.06. Arrivo cioè a circa 20, cioè quanto mi aveva detto il criterio di Routh.
AZIONE CORRETTRICE
Dal diagramma di Nichols della F(jω) si ha:
-360 -315 -270 -225 -180 -135 -90 -45 0-120
-100
-80
-60
-40
-20
0
20
40
60
80
-100 dB
-80 dB
-60 dB
-40 dB
-20 dB
-120 dB
-1 dB
-6 dB
0.5 dB
0 dB
-3 dB 6 dB
-12 dB
3 dB
1 dB
0.25 dB
System: F Gain (dB): -15.9 Phase (deg): -186 Frequency (rad/sec): 5
Dunque si ricava che il punto di lavoro alla ωt =5 rad/s si trova in corrispondenza di:dBjF 9.15|)(| −=ω e °−=∠ 186)( ωjF .
Considerato che mφ=40° e quindi °−=+−=∠ 140)( ϕπω mjF la correzione da apportare prevede un’amplificazione di 15.9 dB e un anticipo di fase pari a 46°.Dovremo utilizzare una rete anticipatrice, caratterizzata da una f.d.t. pari a :
τsα1τs1⋅⋅+
⋅+
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis
- 9 -
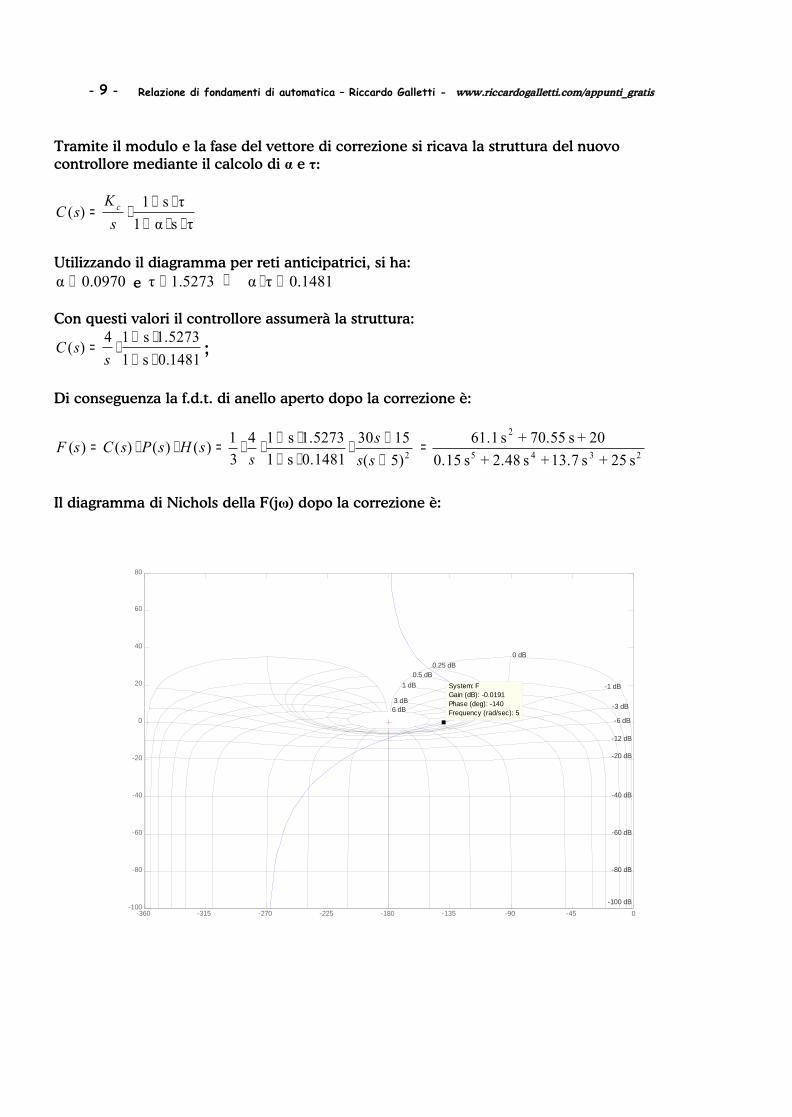
Tramite il modulo e la fase del vettore di correzione si ricava la struttura del nuovo controllore mediante il calcolo di α e τ:
τsα1τs1
)(⋅⋅+
⋅+⋅=
sK
sC c
Utilizzando il diagramma per reti anticipatrici, si ha:0970.0α ≅ e 5273.1τ ≅ ⇒ 1481.0τα ≅⋅
Con questi valori il controllore assumerà la struttura:
1481.0s15273.1s14
)(⋅+⋅+
⋅=s
sC ;
Di conseguenza la f.d.t. di anello aperto dopo la correzione è:
2345
2
2 s 25 + s 13.7 + s 2.48 + s 0.1520 + s 70.55 + s 61.1
)5(1530
1481.0s15273.1s14
31)()()()( =
++⋅
⋅+⋅+⋅⋅=⋅⋅=
sss
ssHsPsCsF
Il diagramma di Nichols della F(jω) dopo la correzione è:
-360 -315 -270 -225 -180 -135 -90 -45 0-100
-80
-60
-40
-20
0
20
40
60
80
-80 dB
-60 dB
-40 dB
-20 dB
1 dB
-100 dB
-1 dB
-6 dB
0.5 dB
0 dB
-3 dB 6 dB
-12 dB
3 dB
0.25 dB
System: F Gain (dB): -0.0191 Phase (deg): -140 Frequency (rad/sec): 5
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 10 -
PARAMETRI TEMPORALI CARATTERISTICI
Sfruttando, a questo punto, i parametri ottenuti nel dominio della frequenza e i legami globali otteniamo i corripondenti parametri caratteristici nel dominio del tempo, facendo riferimento alla f.d.t. a ciclo chiuso:
=⋅⋅+
⋅=
+=
)()()(1)()(
)(1)(
)(sHsPsC
sPsCsFsG
sW
500 + s 2038 + s 3169 + s 1700 +s 473.8 + s 84.62 + s 10.26 + s 0.74 + s 0.021500 + s 6113 + s 7631 + s 3045 +s 486.3 + s 27.5
2345678
23 45
=
Il guadagno statico è W(j0)=3, dunque diagrammiamo tramite Bode la W(s) normalizzata:
10-1
100
101
-270
-225
-180
-135
-90
-45
0
Phas
e (d
eg)
System: W_norm Frequency (rad/sec): 15.3 Phase (deg): -214
-60
-50
-40
-30
-20
-10
0
10
20
System: W_norm Frequency (rad/sec): 9.01
Magnitude (dB): -6 System: W_norm Frequency (rad/sec): 15.3 Magnitude (dB): -20
System: W_norm Frequency (rad/sec): 8.15 Magnitude (dB): -3
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/sec)
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 11 -
Da questi ricaviamo:
15.83 =dBω rad/s ⇒ 30.13 =dBB Hz
01.96 =dBω rad/s ⇒ 43.16 =dBB Hz
3.1520 =dBω rad/s ⇒ 21420 −=dBϕ °
06.7' =ω rad/s ⇒ 12.1' =B Hz
31.4=rM dB 64.1=
TEMPO DI SALITA 315.043.145.045.0
6
===B
ts s
TEMPO ALL’EMIVALORE 299.043.1
|214|002.0||
002.06
20 =−⋅=⋅=B
tsϕ
s
PERIODO DI PRIMA OSCILLAZIONE 089.112.122.1
'22.1 ===B
T s
SOVRAELONGAZIONE MASSIMA 348.018.043.1
30.164.1log42.018.0log42.0
6
3 =+
⋅
⋅=+
⋅⋅= e
re B
BMs
TEMPO DI ASSESTAMENTO AL 5% 972.14.043.1
30.164.116.2
43.11
4.016.21
6
3
6%5, =
−
⋅⋅⋅=
−
⋅⋅⋅=BBM
Bt ra s
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 12 -
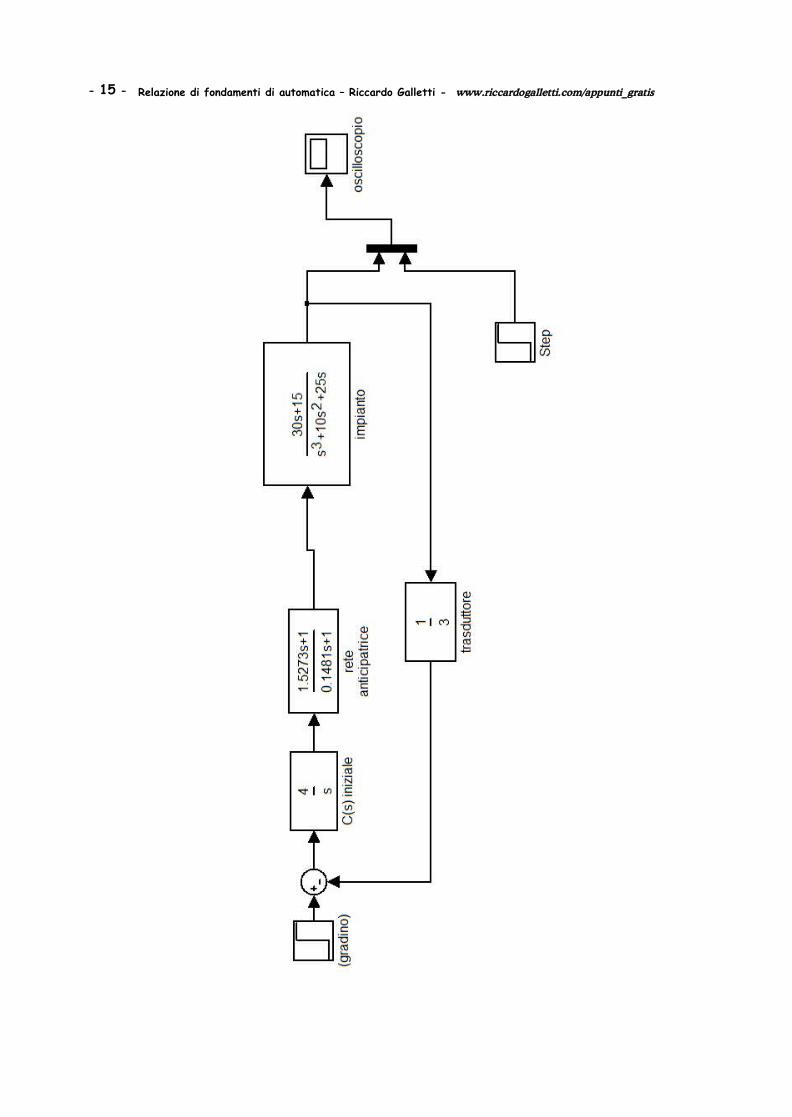
SIMULAZIONE
Per finire, utilizzando lo strumento di simulazione SIMULINK® verifichiamo nel dominio del tempo la correttezza dell’analisi e della sintesi svolta nel dominio di Laplace e della frequenza.
Nelle pagine successive, nell’ordine, saranno presentati i modelli e i grafici relativi all’analisi della risposta indiciale, della risposta complessiva in presenza del riferimento dato e dell’ingresso non manipolabile, infine sarà rappresentato l’errore assoluto a regime.
Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 13 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 14 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis
- 15 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 16 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 17 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 18 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis

- 19 - Relazione di fondamenti di automatica – Riccardo Galletti - www.riccardogalletti.com/appunti_gratis








![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica ...Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 3/3 Danilo Caporale [caporale@elet.polimi.it]](https://img.dokumen.tips/doc/110x75/60beba1ec24c1377aa582d58/laboratorio-di-fondamenti-di-automatica-ingegneria-elettrica-laboratorio-di.jpg)




















