Embed Size (px)
Citation preview

1
COSTRUZIONI AEROSPAZIALI
Applicazioni del metodo di Ritz e Galeerkin alla trave elastica

Prof. Renato Barboni 2
Teoria classica della Trave
Ipotesi 1.Il materiale è omogeneo, isotropo e a comportamento elastico lineare. 2.La struttura è ad asse rettilineo ed a sezione costante. 3.Le forze esterne q(x), per unità di lunghezza, agiscono solo nel piano xz. 4.I carichi assiali agiscono lungo l’asse baricentrico x. 5.La larghezza b è dello stesso ordine di grandezza dello spessore h. 6.La lunghezza L sia tale che (h/L)2 << 1: h < L/10. 7.Lo spostamento w è tale che w/h < 1: wMax< h/5, ovvero wMax< L/50. Una tale ipotesi consente di considerare le coordinate del corpo deformato coincidenti
con quelle del corpo indeformato. 8.Che la rotazione θ della superficie media risulti piccola: ovvero θ<<1. 9.Che sforzi e deformazioni dovute ai carichi assiali siano di un ordine di
grandezza trascurabile rispetto a quelli indotti dalla flessione.
b
h
y z
x
q(x)
L

Prof. Renato Barboni 3
Possiamo allora considerare come elemento rappresentativo di trave quello di figura corrispondente ad un tratto dx della linea media, sollecitato da N,M,T dette caratteristiche di sollecitazione.
La teoria della trave introduce in definitiva tre incognite cinetiche N(x), M(x), T(x) e tre incognite cinematiche u0(x), w0(x) e θ(x).
Il numero delle incognite sembra aumentato rispetto alla teoria classica dell’elasticità nella quale le incognite sarebbero u(x,z), w(x,z), σ(x,z), τ(x,z).
Notiamo però che queste ultime sono funzioni di due variabili x,z mentre u0(x),w0(x),θ(x) sono funzioni solo della variabile x si comprende la reale esemplificazione che comporta la teoria della trave.
TdTdx
dx+
q M
z
x
N NdNdx
dx+
dx
MdMdx
dx+
T

4
La trave tirata
Con relative condizioni agli estremi sullo spostamento u o sulle forze.
z
x
dx N dxdxdNN +
px
x 0
x 0 z
P
0x x
dudN dp 0 AE p 0dx dx dx
+ = ⇒ + =
Spostamento impedito:
Carico P applicato:
Libera
PdxduAE
0x
=
=
u(0)=0
x 0 z
0dxduAE
0x
=
=
Prof. Renato Barboni 5
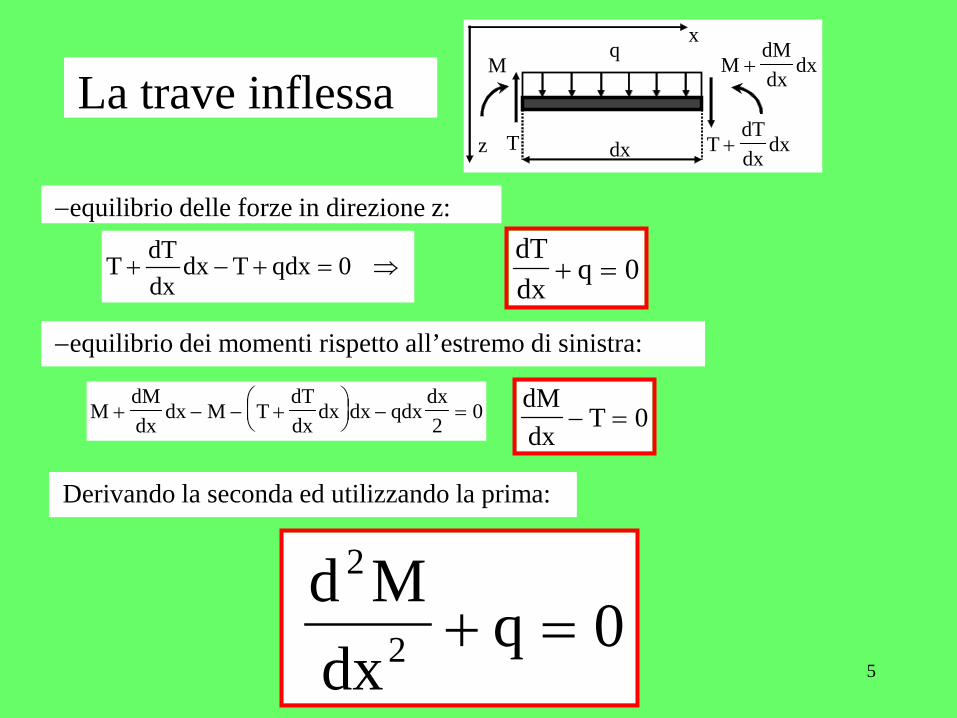
La trave inflessa
−equilibrio delle forze in direzione z:
−equilibrio dei momenti rispetto all’estremo di sinistra:
q
M
z
x
dx
MdMdx
dx+
TdTdx
dx+ T
dTT dx T qdx 0dx
+ − + = ⇒dTdx
q+ = 0
MdMdx
dx M TdTdx
dx dx qdxdx
+ − − +
− =
20 dM
dxT− = 0
Derivando la seconda ed utilizzando la prima:
d Mdx
q2
2 0+ =

Cinematica della trave inflessa
6
εθ
γ θ
ε ε γ γ
xx xz
yy zz xy yz
xdu x
dxz
d xdx
dw xdx
x( )( ) ( )
;( )
( )= + = +
= = = =
0 0
0
Scorrimento
Prof. Renato Barboni 7
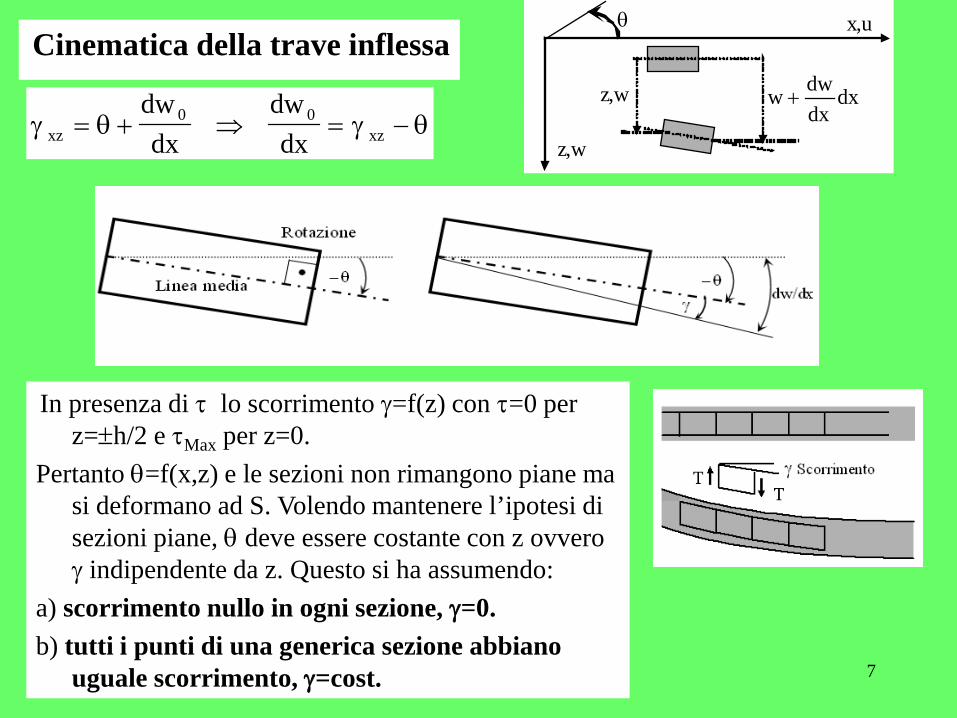
Cinematica della trave inflessa
In presenza di τ lo scorrimento γ=f(z) con τ=0 per z=±h/2 e τMax per z=0.
Pertanto θ=f(x,z) e le sezioni non rimangono piane ma si deformano ad S. Volendo mantenere l’ipotesi di sezioni piane, θ deve essere costante con z ovvero γ indipendente da z. Questo si ha assumendo:
a) scorrimento nullo in ogni sezione, γ=0. b) tutti i punti di una generica sezione abbiano
uguale scorrimento, γ=cost.
γ θ γ θxz xz
dwdx
dwdx
= + ⇒ = −0 0
θ
z,w
z,w
x,u
dxdxdww +

8
Trave di Kirchhoff: assume scorrimento nullo, γ=0:
0xz
0dw 0d
wdx
dx
γ = θ+ = θ = −⇒
2
2
dM EIdx
d wM EIdx
= −θ
= ⇒
3
3
d wT EdMTdx
Idx
= −= ⇒
22 2
2 22
d d w(x)EI qdx dx
d M qdx
⇒
= =
−
Con relative condizioni agli estremi su combinazioni di w , θ , T , M.

Prof. Renato Barboni 9
Trave di Kirchhoff: assume scorrimento nullo, γ=0:
Con relative condizioni agli estremi
( )L h / 2 L L
2xx xx
0 h / 2 0 0
b 1U dx ( )dz EI w dx ; V q(x)w(x)dx2 2
−
′′= σ ε = = −∫ ∫ ∫ ∫
( )L L
2
0 0
EI w qw dx F(x,w,w )dx2
′′ ′′= − = ∫ ∫E
22 2
22 2
d F F 0dx w w
d d wEI qdx dx
∂ =
∂+ ⇒′∂
=′ ∂
LL 2L
200 0
L LL 2
20 0 0
Cond. Geometr Cond. Naturali
F d F d d w( ) w 0 w assegnato EI 0w dx w dx dx
F dw d ww 0 assegnato EI 0w dx dx
∂ ∂ − δ = ⇒ = ′ ′′∂ ∂
∂ ′δ = ⇒ = ′′∂
Principio variazionale

10
Tipiche Condizioni agli estremi
1.Incastro: w=θ=0
2.Appoggio (con cerniera): w=M=0
3.Libera: M=T=0
z x 0
x 0
dww(0) 0dx =
= =
2
2x 0
d ww(0) 0dx =
= =
2 3
2 3x 0 x 0
d w d w 0dx dx= =
= =

Prof. Renato Barboni 11
Metodi di soluzione per la trave inflessa
qdx
wdEI 4
4
=
A1)−impiegando le equazioni in cui le incognite sono solo le grandezze cinematiche (“spostamenti”)
2
2d w(x)EI M(x)
dx= −
con condizioni agli estremi sulle variabili cinematiche
A2)−impiegando le equazioni in cui le incognite sono sia le grandezze cinematiche (“spostamenti”) che cinetiche (“forze”)
con condizioni agli estremi sulle variabili cinematiche e cinetiche
A)-Soluzione analitica esatta

Prof. Renato Barboni 12
Modello del 2° ordine
0 12
10 1
R R qL
qLR L 02
qLR R2
+ = ⇒
− == =
x 22 2
0
0
qLx qx qL x xM(x) R x qxdx2 2 2 L L
= − = − = −
∫3 23
2
2 4 34
dw qL x x4 6 bdx 24EI L Ld wEI M(x)
dx qL x x xw 2 bL a24EI L L L
= − + = − ⇒
= − + +
3
w(0) 0 a 0qLw(L) 0 b
24EI
= ⇒ =
= ⇒ =
3 44
2 33dw qL x x1 6 4dx 24EI L
qL x x xw 22 I L L L
L
4E
= − +
= − +
Prof. Renato Barboni 13
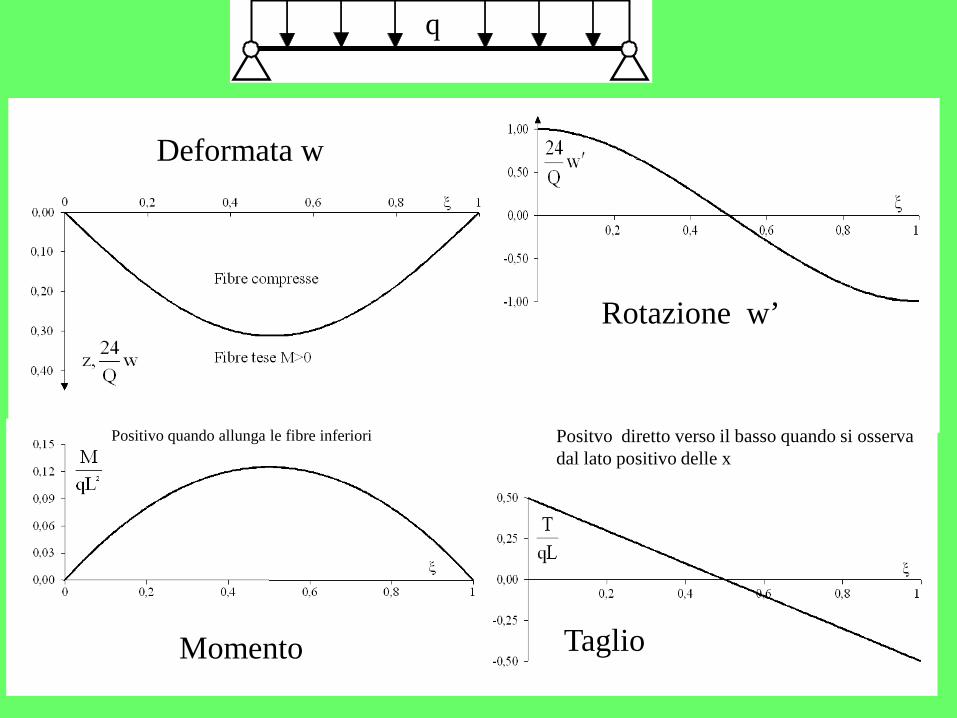
q
Deformata w
Rotazione w’
Momento Taglio
Positivo quando allunga le fibre inferiori Positvo diretto verso il basso quando si osserva dal lato positivo delle x

Prof. Renato Barboni 14
3,00
2,00
1,00
0,00 0,2 0,4 0,6 0,8 1
wQ24,z
ξ
0,00
1,00
2,00
3,00
4,00
0 0,2 0,4 0,6 0,8 1
wQ24 ′
ξ
-0,50
-0,40
-0,30
-0,20
-0,10
0,00 0,2 0,4 0,6 0,8 1 ξ
2qLM
0,00
0,25
0,50
0,75
1,00
0 0,2 0,4 0,6 0,8 1 ξ
qLT
q
Deformata w
Rotazione w’
Momento
Taglio

15
Modello del 4° ordine
[ ]4x d[] qL; ; Q
L d EI′ξ = = =
ξ
4 4 4
4 4
d w q d w qLdx E E
Qd I
wI
= ⇒ = ⇒ξ
′′′′ =
w(0) 0 a 0 ; w (0) 0 b 0w(1) w (1) 0 d Q /12 ; c Q / 24
′= ⇒ = = ⇒ =′= = ⇒ = − =
2 3 4 2 3
2
Q Qw a b c d ; w b 2c 3d 424 24
Qw 2c 6d ; w 6d Q2
′= + ξ + ξ + ξ + ξ = + ξ + ξ + ξ
′′ ′′′= + ξ + ξ = + ξ
qdx
wdEI 4
4
=
42 3 4
32 3
qLw 224EIdw w qL 2 6 4dx L 24EI
= ξ − ξ + ξ
′ θ = − = − = − ξ − ξ + ξ [ ]
2 22
2 2
3
3 3
d w EI qL 1M EI wdx L 2 6
d w EI qLT EI w 1 2dx L 2
′′= − = − = − − ξ + ξ ′′′= − = − = − ξ

16
Trave incastrata ai due estremi:
q

17
Spostamento al variare dei Vincoli
18
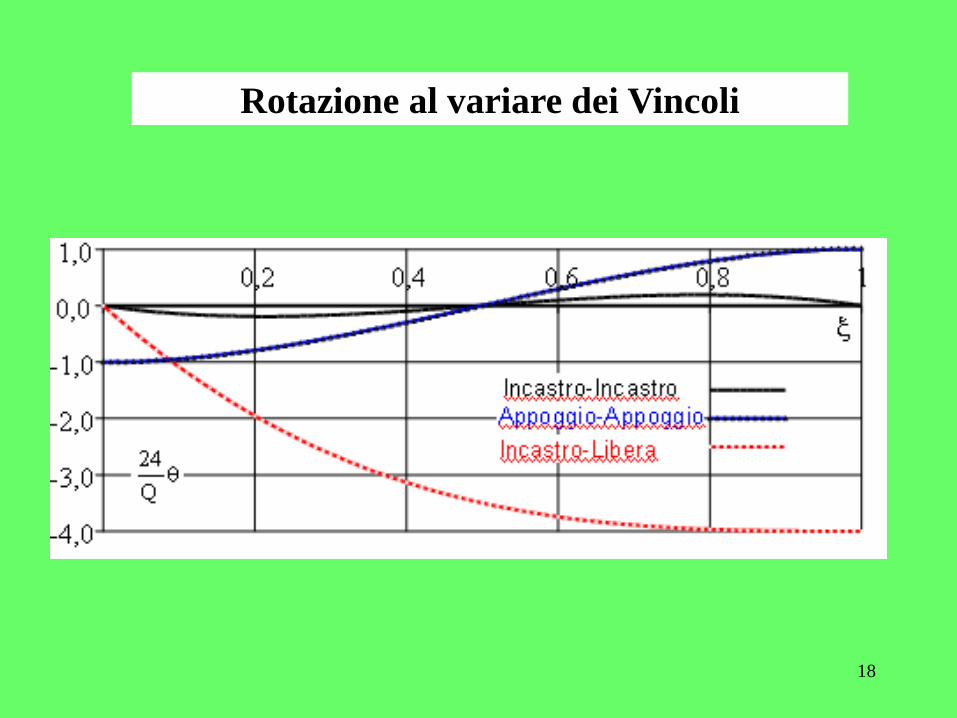
Rotazione al variare dei Vincoli

19
Momento al variare dei Vincoli

20
Taglio al variare dei Vincoli

21
Trave su suolo elastico
2 2
24
2 w 4k w Qd d wEI Kw qdx dx
+ = ⇒ ′′′′ +
=
4
4qL Cosh[k ]cos[k( -1)] + Cosh[k( 1)]cos[k ]w 1
4EIk Cosh(k) cos(k) ξ ξ ξ − ξ
= − +

Prof. Renato Barboni 22
Trave su suolo elastico Soluzione esatta
23
Metodo di Ritz
Prof. Renato Barboni 24
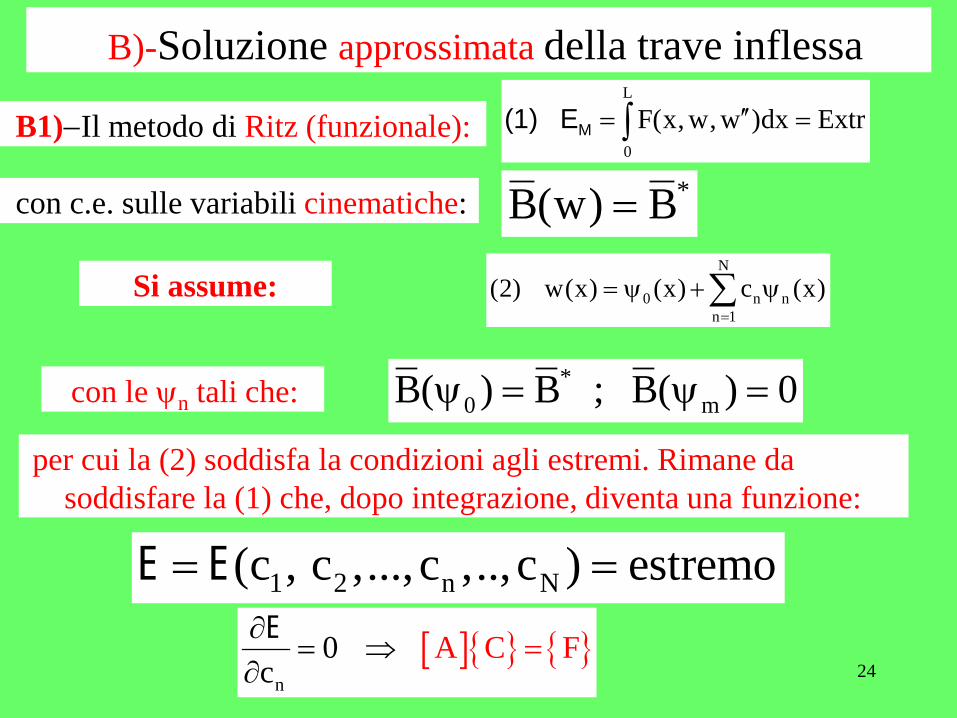
B1)−Il metodo di Ritz (funzionale):
con c.e. sulle variabili cinematiche:
L
0
F(x, w, w )dx Extr′′= =∫M(1) E
N
0 n nn 1
(2) w(x) (x) c (x)=
= ψ + ψ∑
1 2 n N(c , c ,..., c ,.., c ) estremo= =E E[ ]{ } { }
n
0 Ac
C F∂= ⇒
∂=
E
B)-Soluzione approssimata della trave inflessa
*B(w) B=
*0 mB( ) B ; B( ) 0ψ = ψ = con le ψn tali che:
per cui la (2) soddisfa la condizioni agli estremi. Rimane da soddisfare la (1) che, dopo integrazione, diventa una funzione:
Si assume:
25
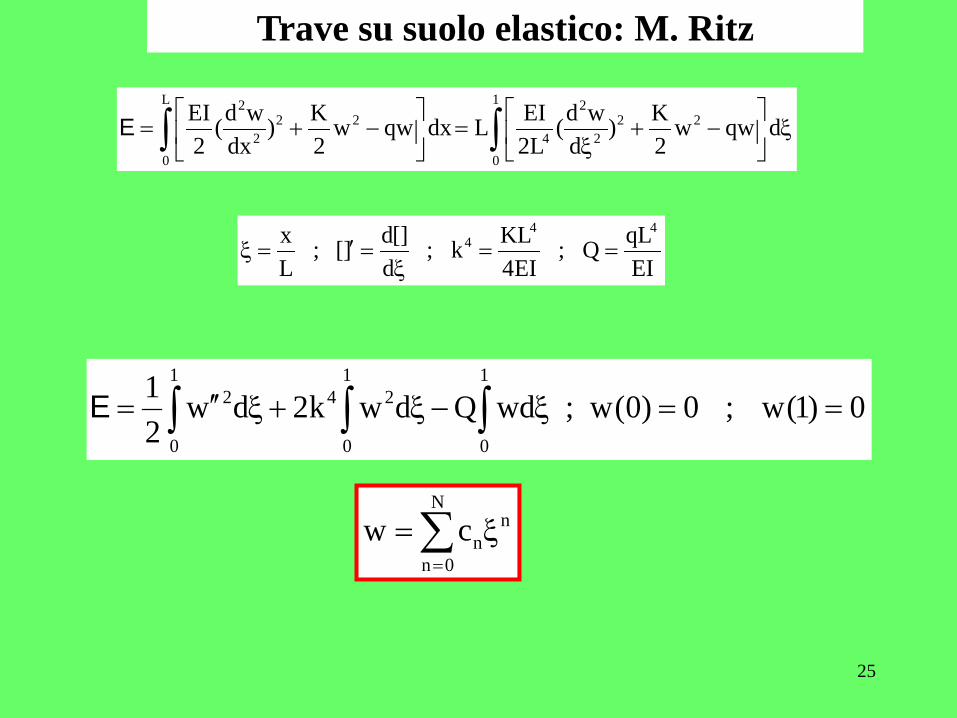
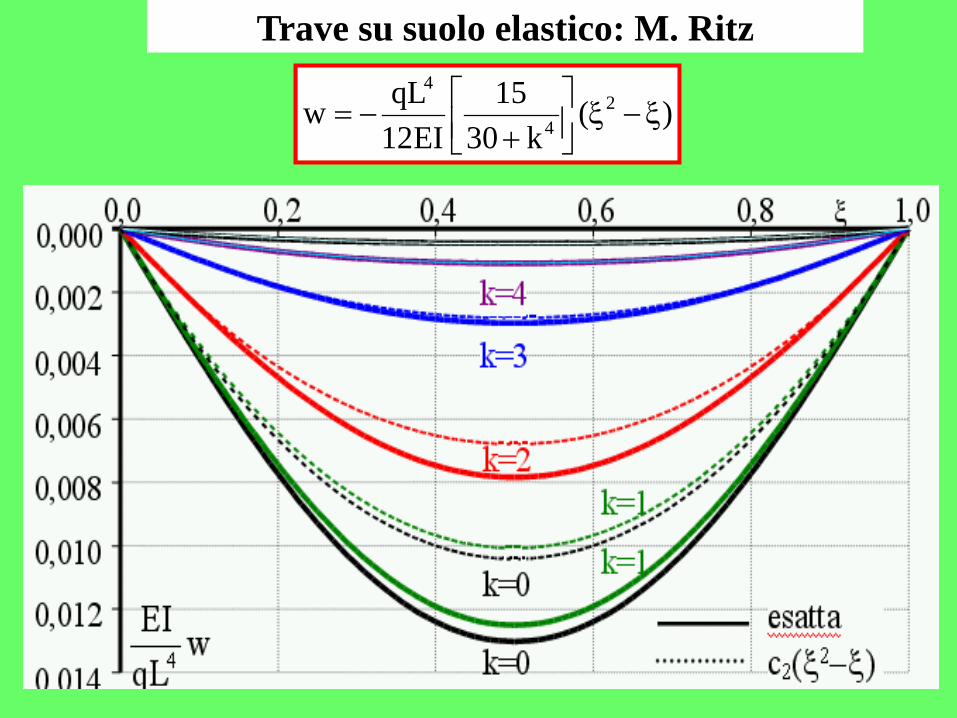
Trave su suolo elastico: M. Ritz
L 12 22 2 2 2
2 4 20 0
EI d w K EI d w K( ) w qw dx L ( ) w qw d2 dx 2 2L d 2
= + − = + − ξ ξ ∫ ∫E
1 1 12 4 2
0 0 0
1 w d 2k w d Q wd ; w(0) 0 ; w(1) 02
′′= ξ + ξ − ξ = =∫ ∫ ∫E
Nn
nn 0
w c=
= ξ∑
4 44x d[] KL qL; [] ; k ; Q
L d 4EI EI′ξ = = = =
ξ
Prof. Renato Barboni 26
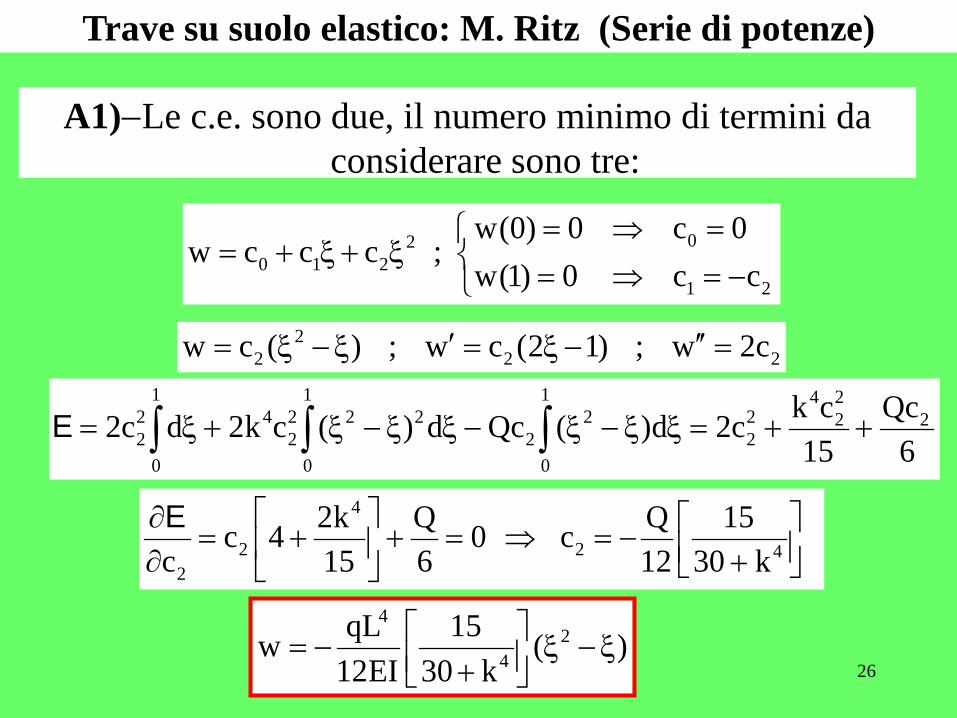
Trave su suolo elastico: M. Ritz (Serie di potenze)
22 2 2w c ( ) ; w c (2 1) ; w 2c′ ′′= ξ − ξ = ξ − =
020 1 2
1 2
w(0) 0 c 0w c c c ;
w(1) 0 c c= ⇒ =
= + ξ + ξ = ⇒ = −
42
4
qL 15w ( )12EI 30 k
= − ξ − ξ +
A1)−Le c.e. sono due, il numero minimo di termini da considerare sono tre:
1 1 1 4 22 4 2 2 2 2 2 2 22 2 2 2
0 0 0
k c Qc2c d 2k c ( ) d Qc ( )d 2c15 6
= ξ + ξ − ξ ξ − ξ − ξ ξ = + +∫ ∫ ∫E
4
2 2 42
2k Q Q 15c 4 0 cc 15 6 12 30 k
∂ = + + = ⇒ = − ∂ +
E
Prof. Renato Barboni 27
Trave su suolo elastico: M. Ritz 4
24
qL 15w ( )12EI 30 k
= − ξ − ξ +
28
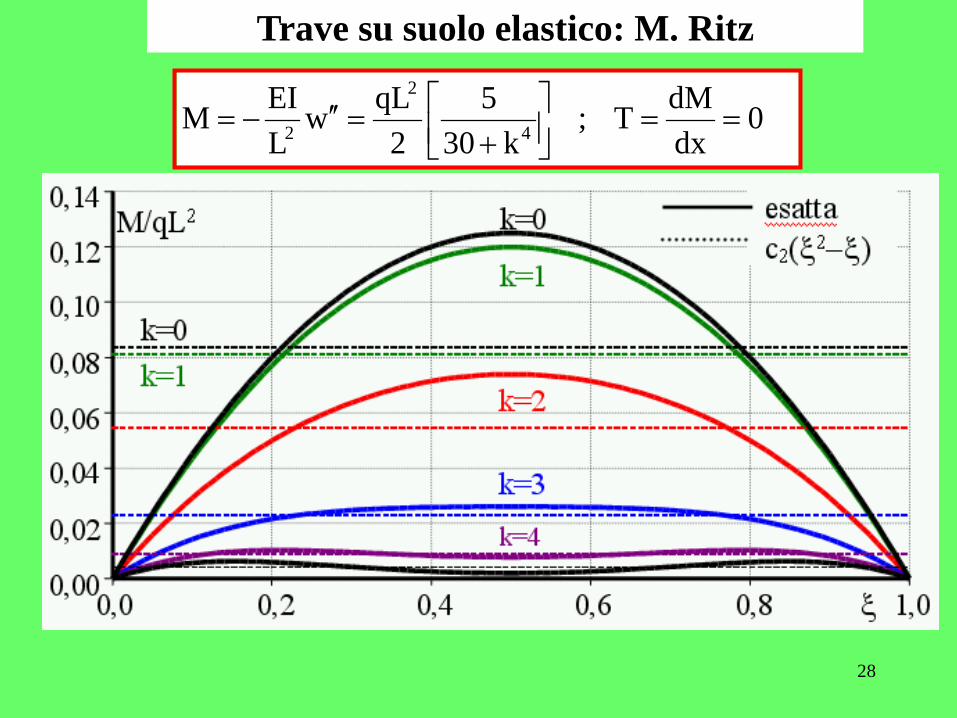
Trave su suolo elastico: M. Ritz 2
2 4
EI qL 5 dMM w ; T 0L 2 30 k dx
′′= − = = = +

29
Trave su suolo elastico: M. Ritz
2 32 3w c ( ) c ( )= ξ −ξ + ξ − ξ
02 30 1 2 3
1 2 3
w(0) 0 c 0w c c c c ;
w(1) 0 c c c= ⇒ =
= + ξ + ξ + ξ = ⇒ = − −
A2)−Numero di termini considerati tre:
Possibilità per calcolo dei due coefficienti: a)−soddisfare una delle condizioni agli estremi sulle “forze”;
b)−ricavare i coefficienti nell’imporre la stazionarietà dell’energia.
43
4qL 105w ( )
16EI 315 8k = − ξ − ξ +
42
4qL 15w ( )
12EI 30 k = − ξ − ξ + ≡caso 2 coefficienti

30
Trave su suolo elastico: M. Ritz 4
34
qL 105w ( )16EI 315 8k
= − ξ − ξ +
42
4qL 15w ( )
12EI 30 k = − ξ − ξ +
1 condizione sulle forze Soluzione peggiore poiche’ violazione della ‘simmetria’ del problema
Minimizzazione della ‘funzione’ energia con 2 coeff. variabili

31
Trave su suolo elastico: M. Ritz 4
34
qL 105w ( )16EI 315 8k
= − ξ − ξ +
42
4qL 15w ( )
12EI 30 k = − ξ − ξ +
esatta w=c3(ξ3−ξ)
Male taglio e momento

Prof. Renato Barboni 32
Trave su suolo elastico: M. Ritz
2 3 42 3 4w c ( ) c ( ) c ( )= ξ −ξ + ξ − ξ + ξ − ξ
02 3 40 1 2 3 4
1 2 3 4
w(0) 0 c 0w c c c c c ;
w(1) 0 c c c c= ⇒ =
= + ξ + ξ + ξ + ξ = ⇒ = − − −
A3)−Numero di termini considerati quattro:
Possibilità per calcolo dei due coefficienti: a)−soddisfare le due condizioni agli estremi sulle “forze”;
b)−ricavare i coefficienti nell’imporre la stazionarietà dell’energia.
44 3
4
qL 63w ( 2 )2EI 756 31k
= ξ − ξ + ξ +

33
Trave su suolo elastico: M. Ritz
Full Stazionaria
44 3
4
qL 63w ( 2 )2EI 756 31k
= ξ − ξ + ξ +
4 Condizioni al contorno

34
Trave su suolo elastico: M. Ritz 4
4 34
qL 63w ( 2 )2EI 756 31k
= ξ − ξ + ξ +
Ie condizioni al contorno sono soddisfatte in maniera esatta
Ie condizioni al contorno sono soddisfatte in maniera approssimata

35
Trave su suolo elastico: M. Ritz (Serie trigonometrica) N N
n n nn 1 n 1
w c c sen(n )= =
= ϕ = πξ∑ ∑4 N
4 4n 1,3,..
qL 4w sen(n )EI n [(n ) 4k ]=
= πξπ π +∑

Prof. Renato Barboni 36
Considerazioni sul metodo di Ritz 1)−Esaminare il problema per individuarne qualche proprietà che non deve essere
alterata dall’espressione w(x) che approssima la soluzione. 2)−La w(x) scelta deve soddisfare le condizioni agli estremi sugli “spostamenti”. 3)−Anche se non indispensabile, la soluzione tende più rapidamente a quella esatta se
la w(x) scelta soddisfa anche le condizioni agli estremi sugli “forze”, il cui ruolo è fondamentale nel calcolo del momento e del taglio.
4)−Se si conosce la soluzione di un problema analogo, con almeno le stesse condizioni geometriche agli estremi, come funzione che approssima la soluzione del problema in esame si può assumere l’espressione analitica nota, combinata con coefficienti da determinare.
5)−Lo sviluppo in serie di potenze ha il vantaggio che le potenze sono integrabili in forma elementare; per avere risultati soddisfacenti anche su momento e taglio, il grado del polinomio non deve essere inferiore al doppio dell’ordine di derivazione con cui la funzione incognita compare nell’energia potenziale totale.
6)−Lo sviluppo in serie di funzioni trigonometriche è una serie in genere più potente della serie di potenze; infatti a parità del numero di coefficienti cn, una funzione trigonometrica è di per sè una serie di potenze.
37
Metodo di Galeerkin

38
B2)−Il metodo di Galerkin (Eq. differenziale):
con c.e. sulle variabili cinematiche e cinetiche : N
0 n nn 1
(2) w(x) (x) c (x)=
= χ + χ∑
L LN N
2M n n 2M 0 n 2M n m 2M 0 mn 1 n 1 0 0
( c ) q ( ) c ( ) dx [q ( )] dx ; m 1,2,..., N= =
χ = − χ ⇒ χ χ = − χ χ =∑ ∑ ∫ ∫L L L L
[ ]{ } { }N
n nm mn 1
c g ; m 1,2,.. , CN B F.=
α = = ⇒ =∑
B)-Soluzione approssimata della trave inflessa
2M(1) (w) q=L
*B(w) B=
Si assume:
con le χn tali che: *0 mB( ) B ; B( ) 0χ = χ =
per cui la (2) soddisfa la condizioni agli estremi. Rimane da soddisfare la (1) che si soddisfa “in media”
Calcolati gli integrali:

Prof. Renato Barboni 39
Trave su suolo elastico: M. Galeerkin 4
44
w(0) 0 ; w(1) 0d w 4k w Q ;w (0) 0 ; w (1) 0d
= =+ = ′′ ′′= =ξ
Nn
nn 0
w c=
= ξ∑2 3 4
0 1 2 3 4w c c c c c= + ξ + ξ + ξ + ξ
4 3 4 34 4w c ( 2 ) c ( ) con 2= ξ − ξ + ξ ≡ ϕ ξ ϕ = ξ − ξ + ξ
4 4 34 424c 4k c ( 2 ) Q+ ξ − ξ + ξ =
1 1 14 3 4 4 3 2 4 3
4 40 0 0
24c ( 2 )d 4k c ( 2 ) d Q ( 2 )dξ − ξ + ξ ξ + ξ − ξ + ξ ξ = ξ − ξ + ξ ξ∫ ∫ ∫4
4 34
qL 63w ( 2 )2EI 756 31k
= ξ − ξ + ξ +
dove N≥4 perché 4 coeff. servono per le 4 c.e. ed 1 per soddisfare l’equazione nel campo.
0
1 2 3 4
w(0) 0 c 0w(1) 0 c c c c
= ⇒ = = ⇒ = − − −
2
3 4
w (0) 0 c 0w (1) 0 c 2c′′ = ⇒ =′′ = ⇒ = −
Stesso di Ritz

Prof. Renato Barboni 40
Trave con carichi concentrati
( )0 1 0
1 1
R R P R P 1R L Pd 0 R P
+ = = −η ⇒ − = = η
( )S 0
D 0
T R P 1 per 0T R P P per 1 = = −η ≤ ξ ≤ η
= − = − η η ≤ ξ ≤
( )
( )
d
S S 00 0
D S
M T dx L R d PL 1 per 0
M M ( ) PL( ) PL 1 per 1
η= = ξ = −η ξ ≤ ξ ≤ η
= η − ξ −η = −ξ η η ≤ ξ ≤
∫ ∫
( ) ( )
( ) ( )
2 2 3*S S
S2
2 2 3*D D
D2
d w L M PLw 1 P 1d EI EI
d w L M PLw 1 P 1d EI EI
′′= − ⇒ = − −η ξ = − −η ξ ξ
′′= − ⇒ = − −ξ η = − −ξ η ξ
P
L
R0 R1
d

Prof. Renato Barboni 41
Trave con carichi concentrati: modello 2° ordine
* *2 2
S DD
* *3 2 3
S D
P Pw (1 ) b w (2 )2 2;P Pw (1 ) b a w (3 )6 6
′ ′= − −η ξ + = − ξ −ξ η+β
= − −η ξ + ξ + = − ξ −ξ η+βξ +α
( ) ( ) ( ) ( )3 3
* *S D
PL PLw 1 P 1 ; w 1 P 1EI EI
′′ ′′= − −η ξ = − −η ξ = − −ξ η = − −ξ η
P
L
R0 R1
d
S D
S D SS D
w (0) 0 ; w (1) 0w ( ) w ( ) ; w ( ) w ( )
= =′ ′η = η η = η
32 3 3
S
32 3 3
D
PLw ( , ) 8(2 3 ) 8(1 )48EIPLw ( , ) 8(2 3 ) 8(1 )48EI
ξ η = η− η +η ξ− −η ξ
ξ η = ξ − ξ + ξ η− −ξ η

42
La funzione di influenza (Green) P
L
R0 R1
d
32 3 3
32 3 3
L 8(2 3 ) 8(1 ) per 048EIG( , )
L 8(2 3 ) 8(1 ) per 148EI
η− η +η ξ − −η ξ ≤ ξ ≤ η ξ η =
ξ − ξ + ξ η− −ξ η η ≤ ξ ≤
N
n nn 1L
0
w( ) P G( , )
w( ) q( )G( , )d
=
ξ = ξ η
ξ = η ξ η η
∑
∫
P
L
R0 R1
d ηn Pn

43
Rotazione in ξ provocata dal carico P=1 in η :
22 3 2
S
22 3
D
L 8(2 3 ) 24(1 )w G 48EI( , )L L 8(2 6 3 ) 8
48EI
θ = − η− η +η − −η ξ ′ ∂ θ ξ η = − =− = ∂ξ θ = − − ξ + ξ η+ η

44
Lo spostamento in ξ provocato dal momento M=1 in η
2(M) 2 3S
(M)2
(M) 2 3 2D
Lw 8(2 6 3 ) 8G 48EIw ( , )
Lw 8(2 3 ) 24(1 )48EI
= − η+ η ξ + ξ ∂ ξ η = = ∂η = ξ − ξ + ξ − −ξ η

Prof. Renato Barboni 45
La rotazione in ξ provocata dal momento M=1 in η
(M) 2 2(M) S
(M)
(M) 2 2D
L 8(2 6 3 ) 24w G 48EI( , )
LL 8(2 6 3 ) 2448EI
θ = − − η+ η + ξ ′ ∂ θ ξ η = − =− = ∂ξ∂η θ = − − ξ + ξ + η

46
Trave con carichi concentrati: modello 4° ordine
2 3 2 3S Dw a b c d ; w= + ξ + ξ + ξ = α +βξ + γξ + δξ
IVSIVD
EIw 0 per 0
EIw 0 per 1
= ≤ ξ ≤ η
= η ≤ ξ ≤
S D
S D
S D3
D S
w ( ) w ( )w ( ) w ( )EIw ( ) EIw ( )
EIw ( ) EIw ( ) PL
η = η ′ ′η = η ′′ ′′η = η ′′′ ′′′η − η =





























