Embed Size (px)
Citation preview

FLOW RATE DYNAMIC BALANCINGAUTOMATIC FLOW RATE REGULATOR - AUTOFLOW®
TECHNICAL FOCUS
The automatic flow rate regulators are able to keep a constant flow rate of the medium that passes through the circuit in which they are installed.
They are pressure independent flow regulators (they are indicated by the abbreviation PICV: Pressure Independent Control Valve). They keep the flow constant to the pre-set value when the operating conditions change. By means of a suitable actuator they can change the nominal flow rate.
FLOW RATE DYNAMIC BALANCING
Automatic flow rate regulator
Independent regulator from pressure
OPERATING PRINCIPLE AND SELECTIONThe regulation element of these devices is composed of a cylinder and a piston which has dedicated lateral openings with fixed and variable geometry through which the medium flows through. These openings are controlled by the piston movement actuated by the pressure of the medium due to the pressure differential persisting on the circuit.Starting from a minimum load loss the regulator is able to maintain a constant flow rate by changing its bore cross section, specifically changing its Kv value to maintain the design flow rate GNOM when the differential pressure (H) changes. Its operation can be divided into three specific configurations.
Variable flow rate systems are the most difficult to balance because the differential pressures, and therefore the network flow rates, vary continuously in relation to the opening or closing position of the 2-way valves. These variations can only be controlled with balancing devices that work in dynamic conditions, i.e. in variable positions. In variable flow rate systems, static devices can only limit the maximum flow rates, but they are not able to cope with the dynamism (i.e. with the continuous pressure and flow rate change) that characterizes the operation of these systems.
GNOMH
ΔPVB
ΔPNOM
Balancing part 4

(A) Below the working range
(B) Within the working range
(C) Above the working range
Condition that occurs when the head that can be "used" by the regulator is lower than the minimum differential pressure value (15 kPa) and therefore the piston does not compress the spring and provides the maximum cross section to the medium.
In this case the valve acts as a static element and is characterized by a fixed Kv value (KvA) and therefore the passing flow rate depends on the differential pressure according to the formula:
The basic design condition after choosing this type of balancing is to ensure a minimum operating head of 15 kPa, which can be used by the regulator.
The valve works with a differential pressure higher than the minimum value and lower than the maximum value required.The piston compresses the spring and provides a free cross section for the medium flow, varying the Kv so as to maintain the flow rate constant at the nominal value when the load changes on the circuit.
When the differential exceeds the maximum value of 200 kPa, the piston fully compresses the spring and provides the minimum cross section to the medium. As in the first case the valve acts as a static element and is characterized by a fixed Kv value (KvC) and therefore the passing flow rate depends on the differential pressure according to the formula:
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
G(constant) = Kv(variable) ⋅ √ ΔP(variable)
G = KvA ⋅
√ ΔP
G = KvC ⋅ √ ΔP
G(constant) = Kv(variable) ⋅ √ ΔP(variable)
G = KvA ⋅
√ ΔP
G = KvC ⋅ √ ΔP
G(constant) = Kv(variable) ⋅ √ ΔP(variable)
G = KvA ⋅
√ ΔP
G = KvC ⋅ √ ΔP

SECONDARY CIRCUIT
Two identical circuits connected to a same primary circuit and calculated to have a nominal flow rate GNOM are subject to different heads (H1 and H2) that generate flow rates different from the design flow rates (G1 and G2) and therefore load losses (ΔP1 and ΔP2) different from the nominal design load loss.The dynamic balancing of a secondary circuit flow rate consists in introducing in each circuit a regulator suitable to neutralize the influence of the primary distribution circuit, especially in the case of very variable loads.
The device consists of body and cartridge:• The body size is usually selected according to the pipe size. However, for economic reasons, in some cases
it is possible to chose a valve body in a size smaller than the pipe size.• The choice of the cartridge depends on the flow rate required for the circuit. Depending on the nominal flow
rate, the cartridge closest to this value is chosen (not necessarily the one with higher flow rate).
In essence, in the previous diagram it is necessary to insert a regulator in every secondary circuit selected according to the nominal flow rate GNOM. In this way, not only under static conditions but in any load situation, every secondary circuit is fed with the design nominal flow rate.
GNOM GNOM
ΔPNOM ΔPNOM
ΔH1 ΔH2
G1G2
H1H2
SIZE AND CARTRIDGE SELECTION

BALANCED CIRCUIT - initial condition
The elements that make up a limiting circuit that controls the flow rate are essentially: distribution lines characterized by distributed and concentrated losses, a zone valve, and the output terminal.
The head to be absorbed by the regulator is greater than the minimum value (15 PPa) and therefore it works correctly within the adjustment range.
To ensure the nominal flow, the valve self-regulates itself in order to have a Kv value equal to:
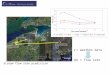
As shown in the diagram, the design load loss of the circuit is 12 kPa, the head persisting on the circuit is 30 kPa and therefore the excessive head must be absorbed by the balancing valve for 18 kPa.
To illustrate the situation, a numerical example is introduced. The circuit in question has a GNOM of 300 l/h and a nominal load loss of the ΔPNOM design flow rate of 12 kPa.If at the circuits ends there is a head of 30 kPa HC, it is necessary to insert a regulator that absorbs the excessive differential pressure, to maintain a constant flow rate in the circuit.
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
Kv = 0,01 ⋅
= 0,01 ⋅
= 0,71 m3/h
G √ ΔPVB
300 √ 18
ΔPVB= HC- ΔPNOM
= 30 - 12 = 18 kPa
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
18 kPa
Graph for load loss Circuit operating curves

BALANCED CIRCUIT - head increase
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
The head to be absorbed by the regulator is greater than the minimum value (15 PPa) and therefore it works correctly within the adjustment range.
To ensure the nominal flow rate and absorb the head excess, the regulator has to introduce an additional load loss into the circuit, this is done by automatically reducing the Kv value according to:
The regulator Kv value changes from 0,71 m3/h to the condition in which it had to absorb a differential of 18 kPa at 0,62 m3/h with a 23 kPa differential. To increase the absorbed load loss, the regulator has decreased its bore cross section dynamically decreasing its Kv.
A head increase at the ends of the balanced circuit from 30 to 35 KPa would result in an increase of the flow rate passing through a dynamically unbalanced circuit; with the use of a regulator the excessive head is absorbed by the valve according to:
Kv = 0,01 ⋅
= 0,01 ⋅
= 0,62 m3/h
G √ ΔPVB
300 √ 23
ΔPVB = HC - ΔPNOM
= 35 - 12 = 23 kPa
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
23 kPa
Graph for load loss Circuit operating curves

WE RESERVE THE RIGHT TO MAKE CHANGES AND IMPROVEMENTS TO THE PRODUCTS AND RELATED DATA IN THIS PUBLICATION, AT ANY TIME AND
WITHOUT PRIOR NOTICE.
0851
917G
B
Visit Caleffi on YouTubeyoutube/CaleffiVideoProjects
REFERENCE DOCUMENT: TECH. BROCHURE 01041 BROCHURE 01141 BROCHURE 01166
Caleffi S.p.A. · S.R. 229 n. 25 · 28010 Fontaneto d’Agogna (NO) · ItalyTel. +39 0322 8491 · Fax +39 0322 863723
[email protected] · www.caleffi.com · © Copyright 2017 Caleffi
BALANCED CIRCUIT - head decrease
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
2 3
5
218
30
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
223
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
2 3
5
215
30
35
20
10
0
0 300 400 G [l/h]
H [kPa]
200100
[kPa]
[kPa]
[kPa]
AUTOFLOW DYNAMIC BALANCINGwith ON/OFF regulation
30 kPa 300 l/h
300 l/h
ΔPVB
HC
HC
HC
ΔPBV ΔPT
Case 1: initial conditions
ΔP C=3
0 kP
a
18
ΔPVBΔPBV ΔPT
Case 2: head increase
ΔP C=3
5 kP
a
ΔPVBΔPBV ΔPT
ΔP C=2
7 kP
a
Case 3: head decrease
23 18
15 18
Kv = 0,71
12
Kv = 0,62
12
300 l/h
Kv = 0,77
12
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔP N
OM
= 12
kPa
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
ΔPC+D ΔPC+D
35 kPa
27 kPa
Condition: initial
Condition: initial
Head increase
Condition: initial
Head decrease
In the event of a head decrease on the primary circuit (from 30 to 27 KPa), the regulator must decrease the load loss value introduced in the circuit (from 18 to 15 Kpa). Also in this case the valve automatically changes in its Kv value (in this case increasing) according to:
The regulator Kv value changes from 0,71 to the condition in which it has to absorb a differential of 18 kPa at 0,77 m3/h with an absorbed differential of 15 kPa.To decrease the absorbed load loss, the regulator has increased its bore cross section dynamically increasing its Kv.
Kv = 0,01 ⋅
= 0,01 ⋅
= 0,77 m3/h
G √ ΔPVB
300 √ 15
Flow
rate
∆P
GNOM
GNOM
GNOM
15 kPa 200 kPa
A
B
C
Flow
rate
Flow
rate
15 kPa 200 kPa
15 kPa 200 kPa∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
∆P∆PMIN ∆PMAX
15 kPa
The installation of AutoFlow dynamic balancing devices in the plumbing circuits ensures it operation at the correct flow rate regardless of the load conditions such as switching on and off other circuits in the same system or excessive heads available at the circuit.The ideal application is therefore related to circuits or zones that need to operate at a constant flow rate, with switching on or off typically controlled by a dedicated zone valve.
Graph for load loss Circuit operating curves