Embed Size (px)
Citation preview

10A New Finite-Horizon H∞Filtering Approach to MobileRobot Localization
In this chapter, a new stochastic H∞ filtering approach is proposed to deal with the localizationproblem of the mobile robots modeled by a class of discrete nonlinear time-varying systemssubject to missing measurements and quantization effects. The missing measurements aremodeled via a diagonal matrix consisting of a series of mutually independent random vari-ables satisfying certain probabilistic distributions on the interval [0, 1]. The measured outputis quantized by a logarithmic quantizer. Attention is focused on the design of a stochastic H∞filter such that the H∞ estimation performance is guaranteed over a given finite horizon inthe simultaneous presence of plant nonlinearities (in the robot kinematic model and the dis-tance measurements), probabilistic missing measurements, quantization effects, linearizationerror, and external non-Gaussian disturbances. A necessary and sufficient condition is firstestablished for the existence of the desired time-varying filters in virtue of the solvability ofcertain coupled recursive Riccati difference equations (RDEs). Owing to its recursive nature,the RDE approach developed is shown to be suitable for online application without the needof increasing the problem size. Both theoretical analysis and simulation results are providedto demonstrate the effectiveness of the proposed localization approach.
10.1 Mobile Robot Kinematics and Absolute Measurement
10.1.1 Kinematic Model
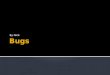
Consider a mobile robot depicted in the coordinate system X OY as shown in Figure 10.1,where the position of the robot is described by a vector z = (x, y), and the orientation of the
Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information, First Edition.Hongli Dong, Zidong Wang, and Huijun Gao.© 2013 John Wiley & Sons, Ltd. Published 2013 by John Wiley & Sons, Ltd.

228 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
Figure 10.1 Scheme of the mobile robot
robot is denoted by an angle θ between the coordinate axis X and the robot forward axis Y ′.The kinematic model of the robot is described by the following equations [179, 180]:⎧⎪⎨⎪⎩
x(t) = v(t) cos θ (t)
y(t) = v(t) sin θ (t)
θ (t) = ω(t), (10.1)
where v(t) and ω(t) are, respectively, the displacement and angular velocities of the robot,both of which can be obtained in present technology by employing odometric measureswith satisfied accurateness. It is assumed that the displacement and angular velocities of therobot received by the odometric measures are constant over the sampling period. Then, thecontinuous-time system (10.1) can be discretized to the following system:⎧⎪⎨⎪⎩
xk+1 = xk + �T vk cos θk
yk+1 = yk + �T vk sin θk
θk+1 = θk + �T ωk
, (10.2)
where �T is the sample time.Setting zk = [ xTk yTk θTk ]
T and
uk =[
�T vk
�T ωk
]:=
[u1,ku2,k
],
system (10.2) can be rewritten as
zk+1 = f (zk, uk), (10.3)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 229
where
f (zk, uk) = zk +⎡⎣ u1,k cos θk
u1,k sin θk
u2,k
⎤⎦. (10.4)
By expanding the nonlinear function f (zk, uk) in a Taylor series about the filtered estimatezk , (10.3) can be further reorganized as
zk+1 = Ak zk + wk, (10.5)
where
Ak =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
∂ fx
∂xk
∂ fx
∂yk
∂ fx
∂θk
∂ fy
∂xk
∂ fy
∂yk
∂ fy
∂θk
∂ fθ∂xk
∂ fθ∂yk
∂ fθ∂θk
⎤⎥⎥⎥⎥⎥⎥⎥⎦
∣∣∣∣∣∣∣∣∣∣∣∣∣zk=zk
=⎡⎣1 0 −u1,k sin θk
0 1 u1,k cos θk
0 0 1
⎤⎦ ∣∣∣∣∣∣zk=zk
(10.6)
and wk = f (zk, uk)− Ak zk + σz . Here, σz represents the higher order terms of the Taylorseries expansions of the nonlinear function f (zk, uk).
Remark 10.1 It is well recognized that the evolution of the system (10.5) depends primarilyon the system matrix Ak, and the nonlinear term wk (also known as linearization error) playsa relatively less important role. As such, a conventional way is to treat the nonlinear termwk as one of the sources for disturbances. On the other hand, it is inevitable that the systemstates are contaminated by external noises. For mathematical convenience, from now on, weslightly abuse the notation by using wk to include both the linearization errors and the externalenvironmental noises. Moreover, wk is assumed to belong to l2[0,∞).
10.1.2 Measurement Model with Quantization and Missing Observations
In this subsection, we shall establish a new measurement model for the mobile robot in orderto account for both the missing measurements and quantization effects.As shown in Figure 10.2, the point M is chosen as a marker and then the distance from the
robot’s planar Cartesian coordinates (xk, yk) to the marker M’s coordinates (xM , yM ) at a timeinstant k can be expressed as follows:
dk =√(xM − xk)2 + (yM − yk)2. (10.7)
The azimuth ϕk at time k can be related to the current system state variables xk , yk , and θk asfollows:
ϕk = θk − arctan yM − yk
xM − xk. (10.8)

230 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
Figure 10.2 Absolute measurements
In robotics applications, both the distance dk and the azimuthϕk are treated asmeasurements.Consequently, from (10.7) and (10.8), the measurement equation is obtained as follows:
mk = g(zk), (10.9)
where
g(zk) =⎡⎣√
(xM − xk)2 + (yM − yk)2
θk − arctan yM − yk
xM − xk
⎤⎦. (10.10)
Again, using Taylor series expansions, the measurement equation (10.9) can be rewritten as
mk = Ck zk + ξk, (10.11)
where
Ck =
⎡⎢⎢⎣∂gd
∂xk
∂gd
∂yk
∂gd
∂θk
∂gϕ
∂xk
∂gϕ
∂yk
∂gϕ
∂θk
⎤⎥⎥⎦∣∣∣∣∣∣∣∣zk=zk
=
⎡⎢⎢⎣− xM − xk√
(xM − xk)2 + (yM − yk)2− yM − yk√
(xM − xk)2 + (yM − yk)20
yM − yk
(xM − xk)2 + (yM − yk)2− xM − xk
(xM − xk)2 + (yM − yk)21
⎤⎥⎥⎦∣∣∣∣∣∣∣∣zk=zk
(10.12)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 231
and ξk = g(zk)− Ck zk + σm . Here, σm represents the higher order terms of the Taylor seriesexpansions of the nonlinear function g(zk). Similar to the discussion in Remark 10.1, ξk ∈l2[0,∞) can be utilized to represent both the linearization error and the external noise.In mobile robotics applications, where the sensor signal is transmitted through network
cables or wireless networks, it is often the case that the measurement outputs are quantizedbefore being transmitted to other nodes. Let us denote the quantizer as h(·) = [h1(·) h2(·)]T,which is symmetric; that is, h j (−v) = −h j (v) ( j = 1, 2). The map of the quantizationprocess is
h(mk) = [h1(m
(1)k ) h2(m
(2)k )
]T.
In this chapter, we are interested in the logarithmic quantization process. For each h j (·)(1 ≤ j ≤ 2), the set of quantization levels is described by
U j = {±μ( j)i , μ
( j)i = χ i
j μ( j)0 , i = 0,±1;±2, . . .} ∪ {0}, 0 < χ j < 1, μ
( j)0 > 0,
where χ j ( j = 1, 2) is called the quantization density. Each of the quantization levels corre-sponds to a segment such that the quantizer maps the whole segment to this quantization level.In addition, the logarithmic quantizer is defined as
h j (m( j)k ) =
⎧⎪⎪⎪⎨⎪⎪⎪⎩μ( j)i ,
1
1+ δ jμ( j)i ≤ m( j)
k ≤ 1
1− δ jμ( j)i
0, m( j)k = 0
−h j (−m( j)k ), m( j)
k < 0
where
δ j = 1− χ j
1+ χ j.
It can be easily seen from the above definition that h j (m( j)k ) = (1+ �
( j)k )m
( j)k with |�( j)
k | ≤ δ j .According to the transformation discussed above, the quantizing effects can be transformedinto the sector-bounded uncertainties [58, 69–71].Defining �k = diag{�(1)
k ,�(2)k }, the measurements with quantization effects can be
expressed as
h(mk) = (I + �k)mk
= (I + �k)(Ck zk + ξk).(10.13)
In practical applications, themeasurements received by the robot may not be consecutive butcontain missing observations due to various reasons such as the maneuverability of the robot,a failure in the measurement, intermittent sensor failures or accidental loss of some collected

232 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
data. In the present chapter, we use the following equation to model the measurements withmissing observations:
mk = �kh(mk)
=2∑
i=1αik Ei (I + �k)mk
(10.14)
where mk is the actually signal available for the robot and
E1 = diag{1, 0}, E2 = diag{0, 1}, �k = diag{α1k, α2k}
with αik ∈ R (i = 1, 2) beingmutually independent random variables that describe themissingmeasurement phenomenon. It is assumed that αik has the probability density function qi (s) onthe interval [0, 1] with mathematical expectation αi and variance σ 2i (i = 1, 2).
Remark 10.2 Up to now, we have established the kinematics model for the mobile robotand the measurement model with both quantization effects and missing observations. Thenext step is to estimate the state of system (10.5) by employing the information received from(10.14). A seemingly natural way is to use the extended Kalman filtering approach based onthe assumption that both the process noise wk and the measurement noise ξk are Gaussianwhite noises. Such an assumption, unfortunately, is impractical in the mobile robot localizationproblem addressed in this chapter. An alternative yet effective approach to dealing with themobile robot localization problem is the robust extended H∞ filter design based on the Kreinspace theory developed in Yang et al. [180]. In fact, the mobile robot localization systemestablished in this chapter is a substantial extension of that in Yang et al. [180] due to theconsideration of both the missing measurements and signal quantizations. Later, a novelrecursive RDE approach will be developed to offer the possibility for online applications ofthe proposed localization algorithm.
10.2 A Stochastic H∞ Filter Design
In this section, we aim to design a stochastic H∞ filter to estimate the state of the mobile robotsystem (10.5) based on the measurement equation (10.14). For this purpose, we construct thefollowing filter:
zk+1 = Ak zk + Kk(mk − �kCk zk), z0 = 0, (10.15)
where �k = E{�k} = diag{α1, α2} and Kk is the filter parameter to be determined.Letting the estimation error be ek = zk − zk , the dynamics of the estimation error can be
obtained from (10.5), (10.14), and (10.15) as follows:
ek+1 = (Ak − Kk�kCk)ek −2∑
i=1(αik − αi )Kk Ei (I + �k)(Ck zk + ξk)
−Kk�k(I + �k)ξk + wk − Kk�k�kCk zk .
(10.16)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 233
Our objective of this chapter is to find the sequence of filter parameter matrices Kk suchthat the filtering error ek satisfies the following H∞ performance requirement:
J = E
{N−1∑k=0(‖ek‖2 − γ 2‖wk‖2 − γ 2‖ξk‖2)
}− γ 2zT0 Sz0 < 0,
∀({wk}, {ξk}, z0) = 0,
(10.17)
for the given disturbance attenuation level γ > 0 and the positive-definite matrix S > 0.By defining � = diag{δ1, δ2} and Fk = �k�
−1, we know that Fk is an uncertain real-valued time-varying matrix satisfying FTk Fk ≤ I . Furthermore, by setting ηk = [ zTk eTk ]
T
and [wk = wTk ξTk ]
T, the combination of (10.5) and (10.16) yields⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
ηk+1 = ( Ak + � Ak)ηk +2∑
i=1αik(Cik + �Cik)ηk + (K1k + �K1k)wk
+2∑
i=1αik(K2ik + �K2ik)wk,
ek = Lηk,
(10.18)
where
Ak = diag{Ak, Ak − Kk�kCk}, Cik =[
0 0−Kk Ei Ck 0
],
K1k =[
I 0I −Kk�k
], K2ik =
[0 00 −Kk Ei
], L = [
0 I],
� Ak = Hk Fk Eck,�Cik = Hki Fk Eck, �K1k = Hk Fk E,
�K2ik = Hki Fk E, Hk = [0 −(Kk�k)T
]T, Eck = [
�Ck 0],
Hki = [0 −(Kk Ei )T
]T, E = [
0 �], αik = αik − αi
and the H∞ performance requirement (10.17) can be rewritten as
J = E
{N−1∑k=0(‖ek‖2 − γ 2‖wk‖2)
}− γ 2ηT0 Rη0 < 0, ∀({wk}, η0) = 0, (10.19)
with R = �Tdiag{S, m I }�, where
� =[
I 0−I I
]and m is an arbitrary positive scalar.

234 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
To dealwith the parameter uncertainties that arise from the quantization effects, we rearrange(10.18) as follows:
ηk+1 = Akηk +2∑
i=1αik Cikηk + B1kwk +
2∑i=1
αik B2ikwk,
ek = Lηk,
(10.20)
where
B1k = [K1k ε−1
k Hk ε−1k Hk
], B2ik = [
K2ik ε−1k Hki ε−1
k Hki
],
wk = [wT
k (εk Fk Ewk)T (εk Fk Eckηk)T]T
and εk is a positive function representing a scaling of the perturbation that is introduced toprovide more flexibility in the solution [181].Let J be the H∞ performance requirement for the system (10.20) defined by
J = E
{N−1∑k=0(‖ek‖2 − γ 2‖wk‖2)+ γ 2(‖εk Ewk‖2 + ‖εk Eckηk‖2)
}
−γ 2ηT0 Rη0 < 0, ∀({wk}, η0) = 0.
(10.21)
Before proceeding further, we introduce the following lemmas which will be utilized in thesubsequent developments.
Lemma 10.2.1 Consider the performance indices defined in (10.19) and (10.21), respectively.We can conclude that J ≤ J .
Proof. It is easily seen that
J − J = E
{N−1∑k=0
γ 2(‖wk‖2 − ‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2
)}
= E
{N−1∑k=0
γ 2(‖εk Fk Ewk‖2 + ‖εk Fk Eckηk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2
)}
= E
{N−1∑k=0
γ 2(‖εk[F
Tk Fk − I ]1/2 Ewk‖2 + ‖εk[F
Tk Fk − I ]1/2 Eckηk‖2
)} ≤ 0,
which ends the proof.

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 235
Remark 10.3 Note that the uncertainties in the parameters of system (10.18) are treatedas an additive perturbation wk . As can be seen from Lemma 10.2.1, J is an upper bound ofJ ; that is, J = max J . Therefore, the performance index J can be used to replace J in ourstochastic H∞ filtering problem.
Lemma 10.2.2 [182] Let matricesG, M , and � be given with appropriate dimensions. Then,the matrix equation
G X M = � (10.22)
has a solution X if and only if GG†�M†M = �. Moreover, any solution to (10.22) is repre-sented by
X = G†�M† + Y − G†GY M M†,
where Y is a matrix with an appropriate size.
Lemma 10.2.3 Consider themobile robot localization system (10.5) and (10.14) with a givendisturbance rejection attenuation level γ > 0 and a positive-definite matrix S > 0. For eachk = 0, 1, . . . , N − 1, the filtering error ek in (10.16) satisfies the H∞ performance requirement(10.21) if and only if there exists a positive function εk > 0 such that the discrete RDE⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
Qk = ATk Qk+1 Ak +2∑
i=1σ 2i CT
ik Qk+1Cik + LT L + γ 2ε2k ETck Eck
+(
BT1k Qk+1 Ak +2∑
i=1σ 2i BT2ik Qk+1Cik
)T�−1
k
×(
BT1k Qk+1 Ak +2∑
i=1σ 2i BT2ik Qk+1Cik
),
QN = 0
(10.23)
has a solution (Qk, Kk) satisfying⎧⎪⎨⎪⎩�k = −BT1k Qk+1 B1k −2∑
i=1σ 2i BT2ik Qk+1 B2ik − γ 2(ε2k ETI ET E EI − I ) > 0
Q0 < γ 2R,
(10.24)
where EI = [ I 0 0 ] and R is defined in (10.19).

236 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
Proof.
SufficiencyBy defining
Jk = ηTk+1Qk+1ηk+1 − ηTk Qkηk (10.25)
and noticing (10.20), we have
E{ Jk} = E
⎧⎨⎩(
Akηk +2∑
i=1αik Cikηk + B1kwk +
2∑i=1
αik B2ikwk
)TQk+1
×(
Akηk +2∑
i=1αik Cikηk + B1kwk +
2∑i=1
αik B2ikwk
)− ηTk Qkηk
}
= E
{ηTk
(ATk Qk+1 Ak +
2∑i=1
σ 2i CTik Qk+1Cik − Qk
)ηk
+2ηTk(
ATk Qk+1 B1k +2∑
i=1σ 2i CT
ik Qk+1 B2ik
)wk
+wTk
(BT1k Qk+1 B1k +
2∑i=1
σ 2i BT2ik Qk+1 B2ik
)wk
}.
(10.26)
Adding the zero term
‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)−(‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2))
to both sides of (10.26) and then taking the mathematical expectation results in
E{ Jk} = E
{ηTk
(ATk Qk+1 Ak +
2∑i=1
σ 2i CTik Qk+1Cik + LT L + γ 2ε2k ETck Eck − Qk
)ηk
+2ηTk(
ATk Qk+1 B1k +2∑
i=1σ 2i CT
ik Qk+1 B2ik
)wk + wT
k
(BT1k Qk+1 B1k
+2∑
i=1σ 2i BT2ik Qk+1 B2ik + γ 2(ε2k ETI ET E EI − I )
)wk
}−E{‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)}. (10.27)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 237
By applying the completing squares method, we have
E{ Jk} = ηTk
[ATk Qk+1 Ak +
2∑i=1
σ 2i CTik Qk+1Cik + LT L + γ 2ε2k ETck Eck − Qk
+(
BT1k Qk+1 Ak +2∑
i=1σ 2i BT2ik Qk+1Cik
)T�−1
k
(BT1k Qk+1 Ak
+2∑
i=1σ 2i BT2ik Qk+1Cik
)]ηk − (wk − w∗
k )T�k(wk − w∗
k )
−E{‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)},
(10.28)
where
w∗k = �−1
k
(BT1k Qk+1 Ak +
2∑i=1
σ 2i BT2ik Qk+1Cik
)ηk . (10.29)
Taking the sum on both sides of (10.25) from 0 to N − 1, we obtain
E
{N−1∑k=0
Jk
}= E{ηTN QN ηN } − ηT0 Q0η0
= −N−1∑k=0(wk − w∗
k )T�k(wk − w∗
k )−N−1∑k=0
E{‖ek‖2
−γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)}.
(10.30)
Since �k > 0, Q0 − γ 2R < 0, QN = 0, and η0 = 0, it follows that
J = E
{N−1∑k=0(‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2))
}− γ 2ηT0 Rη0
= ηT0 (Q0 − γ 2R)η0 −N−1∑k=0
E{(wk − w∗k )T�k(wk − w∗
k )} < 0,
(10.31)
which is equivalent to (10.21). This means that the prespecified H∞ performance is satisfied,and therefore the proof of sufficiency is complete.
NecessityWe now proceed to prove that if J < 0, then there exists a solution Qk (0 ≤ k < N ) to therecursive equations (10.23) such that �k > 0 is satisfied for all nonzero ({wk}, η0). In fact,the recursion (10.23) can always be solved backward with the known final condition QN = 0if and only if �k > 0 for all k ∈ [0, N ). If (10.23) fails to proceed for some k = k0 ∈ [0, N ),

238 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
then �k0 has at least one zero or negative eigenvalue. Therefore, the proof of necessity isequivalent to the proof of the following proposition:
J < 0 =⇒ λi (�k) > 0, ∀k ∈ [0, N ), i = 1, 2, . . . , 9, (10.32)
where λi (�k) denotes the eigenvalue of �k at time i . The rest of the proof is carried outby contradiction. That is, assuming that at least one eigenvalue of �k is either equal to 0or negative at some time point k = k0 ∈ [0, N ), we intend to prove that J < 0 is not true.For simplicity, we denote such an eigenvalue of �k at time k0 as λk0 ; that is, λk0 ≤ 0. In thefollowing, we shall use such a nonpositive λk0 to reveal that there exist certain ({wk}, η0) = 0such that J ≥ 0. First, we can choose η0 = 0 and
wk =
⎧⎪⎨⎪⎩ψk0 , k = k0,
w∗k , k0 < k < N ,
0, 0 ≤ k < k0,
(10.33)
where ψk0 is the eigenvector of �k0 with respect to λk0 . Since η0 = 0 and ξk = 0 when0 ≤ k < k0, we can obtain from (10.20), (10.28), and (10.30) that
J = E
{N−1∑k=0(‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2))
}− γ 2ηT0 Rη0
=k0−1∑k=0
E{‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)}
+N−1∑
k=k0+1E{‖ek‖2 − γ 2(‖wk‖2 − ‖εk Ewk‖2 − ‖εk Eckηk‖2)}
+E{‖ek0‖2 − γ 2(‖wk0‖2 − ‖εk0 Ewk0‖2 − ‖εk0 Eck0ηk0‖2)}
= −N−1∑
k=k0+1(wk − w∗
k )T�k(wk − w∗
k )− (wk0 − w∗k0 )T�k0 (wk0 − w∗
k0 )
−N−1∑
k=k0+1E{ Jk} + ηTk0
[ATk0 Qk0+1 Ak0 +
2∑i=1
σ 2i CTik0Qk0+1Cik0 + LT L
+(
BT1k Qk+1 Ak +2∑
i=1σ 2i BT2ik Qk+1Cik
)T�−1
k
(BT1k Qk+1 Ak
+2∑
i=1σ 2i BT2ik Qk+1Cik
)+ γ 2ε2k0 ETck0
Eck0 − Qk0
]ηk0 − E{ Jk0}
= −wTk0
�k0wk0 = −ψTk0
�k0ψk0 = −λk0‖|ψk0‖2 ≥ 0,
(10.34)
which contradicts with the condition J < 0. Therefore, we can conclude that �k > 0 and theproof is now complete.

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 239
So far, we have analyzed the system’s H∞ performance in terms of the solvability of abackward Riccati equation in Lemma 10.2.3. In the next stage, we shall proceed to tackle thedesign problem of the filter (10.15) such that the filtering error ek in (10.16) satisfies the H∞performance requirement (10.21) in the worst case of the disturbance w∗
k .
Theorem 10.2.4 Consider the mobile robot localization system (10.5) and (10.14). Given adisturbance rejection attenuation level γ > 0 and a positive-definite matrix S > 0. For eachk = 0, 1, . . . , N − 1, assume that there exists a positive function εk > 0 such that the discreteRDE (10.23) has a solution (Qk, Kk) satisfying (10.24) and the discrete RDE⎧⎪⎪⎪⎨⎪⎪⎪⎩
Pk = ATk Pk+1Ak +
2∑i=1
σ 2i BTik Pk+1Bik + LT L − ATk Pk+1�−1
k Pk+1Ak,
PN = 0,
Nk = NkM†kMk
(10.35)
has a solution (Pk, Kk) satisfying
�k = Pk+1 + I > 0, (10.36)
where
Nk = L�−1k Pk+1Ak LT, Mk = �kCk . (10.37)
Then, it can be concluded that:
(i) The worst-case disturbance w∗k and the filter gain matrix Kk are given by
w∗k = �−1
k
(BT1k Qk+1 Ak +
2∑i=1
σ 2i BT2ik Qk+1Cik
)ηk, (10.38)
Kk = NkM†k + Yk − YkMkM†k, Yk ∈ R3×2, k = 1, 2, . . . , N − 1. (10.39)
(ii) The filtering error ek in (10.16) satisfies the H∞ performance requirement (10.21).(iii) The costs or performance objectives of J and Jw∗ are
J = ηT0 (Q0 − γ 2R)η0, Jw∗ = ηT0 P0η0,
where
Ak = Ak + B1k�−1k BT1k Qk+1 Ak + B1k�
−1k
(2∑
i=1σ 2i BT2ik Qk+1Cik
),
Bik = Cik + B2ik�−1k BT1k Qk+1 Ak + B2ik�
−1k
(2∑
i=1σ 2i BT2ik Qk+1Cik
),
Ak = diag{Ak, Ak}.

240 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
Proof. First, it follows from Lemma 10.2.3 that, when a solution Qk to (10.23) existssuch that �k > 0 and Q0 < γ 2R, then the filtering error ek satisfies the H∞ performancerequirement (10.21). Moreover, according to (10.31), the worst-case disturbance can beexpressed as w∗
k = �−1k (B
T1k Qk+1 Ak + ∑2
i=1 σ 2i BT2ik Qk+1Cik)ηk and the performance indexis J = ηT0 (Q0 − γ 2R)η0.In what follows, we aim to determine the filter gain matrix Kk under the situation of
worst-case disturbance w∗k . To this end, a cost functional is defined as follows:
Jw∗ = E
{N−1∑k=0(‖ek‖2 + ‖ϒk‖2)
}, (10.40)
with ϒk = −Kk�kCkek ; and in this case, the original system (10.20) with the worst-casedisturbance w∗
k can be rewritten as
⎧⎪⎨⎪⎩ηk+1 = Akηk +2∑
i=1αikBikηk + ϒk,
ek = Lηk,
(10.41)
where ϒk = [ 0 ϒTk ]T.
In order to obtain the parametrization of Kk , we define
Jk = ηTk+1Pk+1ηk+1 − ηTk Pkηk . (10.42)
Noticing (10.41) and taking mathematical expectation on both sides of (10.42), we have
E{Jk} = E
⎧⎨⎩(Akηk +
2∑i=1
αikBikηk + ϒk
)TPk+1
(Akηk +
2∑i=1
αikBikηk + ϒk
)
− ηTk Pkηk
}
= E
{ηTk
(AT
k Pk+1Ak +2∑
i=1σ 2i BTik Pk+1Bik − Pk
)ηk + 2ηTk AT
k Pk+1ϒk
+ ϒTk Pk+1ϒk
}. (10.43)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 241
Then, it follows that
E{Jk} = E
{ηTk
(AT
k Pk+1Ak +2∑
i=1σ 2i BTik Pk+1Bik − Pk
)ηk + 2ηTk AT
k Pk+1ϒk
+ ϒTk Pk+1ϒk
}+ E{‖ek‖2 + ‖ϒk‖2 − ‖ek‖2 − ‖ϒk‖2}
= ηTk
(AT
k Pk+1Ak +2∑
i=1σ 2i BTik Pk+1Bik + LT L − Pk
)ηk
+2ηTk ATk Pk+1ϒk + ϒT
k (Pk+1 + I )ϒk − E{‖ek‖2 + ‖ϒk‖2}.
By applying the completing squares method again, we have
E{Jk} = ηTk
(AT
k Pk+1Ak +2∑
i=1σ 2i BTik Pk+1Bik + LT L − AT
k Pk+1�−1k Pk+1Ak − Pk
)× ηk + (ϒk − ϒ∗
k )T�k(ϒk − ϒ∗
k )− E{‖ek‖2 + ‖ϒk‖2}, (10.44)
where
ϒ∗k = −�−1
k Pk+1Akηk . (10.45)
Therefore, from (10.35), it is true that
Jw∗ = E
{N−1∑k=0(‖ek‖2 + ‖ϒk‖2)
}
=N−1∑k=0(ϒk − ϒ∗
k )T�k(ϒk − ϒ∗
k )+ ηT0 P0η0.
(10.46)
In order to suppress the cost of Jw∗ , the best choice for Kk is to satisfy ϒk = ϒ∗k , from
which we can obtain that
Kk�kCk = L�−1k Pk+1Ak LT. (10.47)
According to Lemma 10.2.2, it can be observed that the existence of a solution Kk (k =0, 1, . . . , N − 1) to (10.47) is equivalent to the feasibility of NkM†kMk = Nk , whose gen-eral solution is given by Kk = NkM†k + Yk − YkMkM†k , Yk ∈ R
3×2, k = 1, 2, . . . , N − 1.Furthermore, the performance index is Jw∗ = ηT0 P0η0, and this completes the proof.
Bymeans of Theorem 10.2.4, we can summarize the finite-horizon H∞ filter design (FHFD)algorithm as follows.

242 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
Algorithm FHFD
Step 1. Given the H∞ performance index γ and the positive-definite matrix S, setk = N − 1 and an initial value εN−1 satisfying −γ 2(ε2N−1ETI ET E EI − I ) > 0.Then, QN = PN = 0 are obtained.
Step 2. Calculate �k , �k , Nk , andMk with known Qk+1 and Pk+1 via the firstequation of (10.24) and equations (10.36) and (10.37), respectively. Furthermore,the filter gain matrix Kk can be obtained by equation (10.39).
Step 3. If Nk = NkM†kMk , then solve the first equation of (10.23) and (10.35)to get Qk and Pk , respectively, and go to the next step, else this algorithm isinfeasible, stop.
Step 4. If k = 0, �k > 0, and �k > 0, set k = k − 1 and go to Step 2, else go tothe next step.
Step 5. If Q0 ≥ r2R or �k ≤ 0 or �k ≤ 0, then this algorithm is infeasible, stop.
Remark 10.4 In Theorem 10.2.4, a unified framework is established to solve the mobilerobot localization problem with both quantization effects and missing measurements. It isworth mentioning that the proposed technique designed is presented by solving certain coupledrecursive RDEs. This way, a suboptimal filter is obtained in terms of (10.35) to realize theH∞-constraint criterion. The advantages of the proposed stochastic H∞ filter lie in that itcan deal with (1) the linearization error and other non-Gaussian disturbances which are notassumed to have statistic characteristics and (2) the negative effects brought by the possiblynonconsecutive measurements containing quantizations and missing observations.
10.3 Simulation Results
In this section, we present a simulation example for mobile robot localization to illustrate theeffectiveness of the proposed filter design scheme. The filter is established to estimatethe mobile robot states (position and orientation in planar motion) using the odometry and theinformation from the marker detection.Set N = 300. Let the sampling period of the robot’s odometer be 150 ms, and let the
displacement velocity and the angular velocity be 300 mm/s and 5 rad/s, respectively. Theinitial states are x0 = 0.1 m, y0 = 0.1 m, and θ0 = 0.1 rad/s. The position of marker M isxM = 5m, yM = 5m. The process andmeasurement errors are chosen aswk = 0.02 sin(100k)and ξk = 0.01 sin(100k). Consider the parameters of the logarithmic quantizer as μ10 = 0.16,μ20 = 0.3, χ1 = 0.6, and χ1 = 0.35. TheH∞ performance level γ , the positive-definite matrixS, and the initial value of εk are chosen as γ = 1, S = diag{1, 1, 1}, and εk = 0.7, respectively.Suppose that the probabilistic density functions of α1k and α2k in [0, 1] are described by
q1(s1) =
⎧⎪⎨⎪⎩0.2 s1 = 0
0.3 s1 = 0.5
0.5 s1 = 1, q2(s2) =
⎧⎪⎨⎪⎩0.3 s2 = 0
0.3 s2 = 0.5
0.4 s2 = 1, (10.48)

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 243
from which the expectations and variances can be easily calculated as α1 = 0.65, α2 = 0.45,σ 21 = 0.39, and σ 22 = 0.43.Two indices are employed to evaluate the performance of the filter. Let Zk = [Xk, Yk,�k]
be the actual position of robot R at moment k. Define
Ee := 1
N
N∑k=1
√(xk − Xk)2 + (yk − Yk)2, (10.49)
which stands for the error mean of filtered estimates of R from moment 1 to N , and
Me := max1≤k≤N
√(xk − Xk)2 + (yk − Yk)2, (10.50)
which means the maximum deviation of filtered estimates of R from moment 1 to N .The simulation results are shown in Figure 10.3 for the robot position and its estimate
and in Figure 10.4, for the robot angle and its estimate. The error mean between the actualtrajectory and its estimates is Ee = 0.2732 m, and the maximum deviation of filtered estimatesis Me = 0.4863 m.Next, in order to illustrate the effectiveness of our results for different measurement missing
situations, we consider the case when the probability for multiple missing measurementsbecomes lower. Take the probabilistic density functions of α3k and α4k in [0, 1] as
q3(s1) =
⎧⎪⎨⎪⎩0 s1 = 0
0.1 s1 = 0.5
0.9 s1 = 1, q4(s2) =
⎧⎪⎨⎪⎩0 s2 = 0
0.01 s2 = 0.5
0.99 s2 = 1, (10.51)
−6 −4 −2 0 2 4 60
1
2
3
4
5
6
7
8
9
x (m)
y (m
)
Actual robot trajetoryThe estimation
Figure 10.3 Robot trajectory and its estimate

244 Filtering, Control and Fault Detection with Randomly Occurring Incomplete Information
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
400
Actual robot angleThe estimation
Figure 10.4 Robot angle and its estimate
−6 −5 −4 −3 −2 −1 0 1 2 3 4−2
0
2
4
6
8
10
Actual robot trajetoryThe estimation
x (m)
y (m
)
Figure 10.5 Robot trajectory and its estimate when the packet-loss probability is lower

A New Finite-Horizon H∞ Filtering Approach to Mobile Robot Localization 245
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
Actual robot angleThe estimation
Figure 10.6 Robot angle and its estimate when the packet-loss probability is lower
from which the expectations and variances can be easily calculated as α3 = 0.95, α4 = 0.995,σ 23 = 0.15, and σ 24 = 0.05. The robot position and its estimate are plotted in Figure 10.5 andthe robot angle and its estimate are shown in Figure 10.6. Similarly, the mean error betweenthe actual trajectory and its estimates is Ee = 0.1647 m, and the maximum deviation of filteredestimates is Me = 0.3711 m. It can be observed from the simulation results that the lowerthe multiple packet-loss probabilities are, the better are the accuracy and reliability of thelocalization performance and, therefore, the more feasible is the stochastic H∞ filter designproblem addressed.
10.4 Summary
In this chapter, the localization problem has been investigated for a mobile robot system withnon-Gaussian disturbances, missing measurements, and quantization effects. The missingmeasurements were modeled by a series of mutually independent random variables satisfyingcertain probabilistic distributions on the interval [0, 1]. In the framework of logarithmic quan-tization, by means of stochastic H∞ filtering technology a new filtering approach has beenproposed to ensure the localization of a mobile robot for autonomous navigation equippedwith internal sensors and external sensors. Moreover, the filter gains have been explicitlycharacterized by means of the solvability of certain coupled recursive RDEs. Finally, somesimulation results have been provided to show the effectiveness of the proposed localizationmethod.









![H2E: A Privacy Provisioning Framework for Collaborative Filtering … · 2019-09-10 · collaborative filtering, content-based filtering, and hybrid filtering [3]. Content-based filtering,](https://img.dokumen.tips/doc/110x75/5f2811153d39b70bb31af3b8/h2e-a-privacy-provisioning-framework-for-collaborative-filtering-2019-09-10-collaborative.jpg)