Embed Size (px)
Citation preview

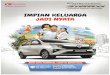
Figure 4 Symmetric cycle of step time 3. Top row, time; middle row, states of one head; bottom row, states of other head. Docked states with red emphasis, undocked states with green emphasis.
ResultsInitial results reveal a 3 phase system:
diffusion – kinesin fails to processprocession – kinesin walks along the MTstuck – kinesin stuck in one position on the MT
A linear relationship between timing and phase had been expected but the results appeared chaotic. 2 types of processionary cycle were discovered: symmetric (figure 4) and asymmetric. The latter involves head docking oscillation and is so far resistant to analysis.Suppressing the asymmetric cycles reduces the system phases to 2: procession or stuck. It also makes the results linear so that a simple timing equality defines procession.
Program operationThe program is run repeatedly to systematically investigate the effect of altering the timing of state transitions on the motor’s behaviourA simulation run starts with both heads in state KDu not far from the minus end of the MTThe motor “diffuses”: constrained random motion is applied to each head until the MT is approached and kinesin engages with the MTThe run is terminated when the motor reaches the plus end of the MT or procession fails
Modelling microtubule active Modelling microtubule active transporttransport
M A
o c
The computational modelEach head is modelled as a finite state machine (FSM) simulated within a 2D box containing a section of microtubule (MT).The maximum possible number of states of the FSM is 8 since a head has 4 states of nucleotide binding (KT, KDP, KD, K0) and is either docked to the microtubule (MT) or not, Not all these states are physically realistic. Experimental evidence indicates that KD has weak affinity for the MT whereas K0, KD and KDP have high affinity for the MT (Asenjo, Krohn & Sosa 2003). Thus the number of states per head can be reduced to 5.Each head follows the same series of states during procession: …KDu -> KD -> K0 -> KT -> KDP -> KDu…The relative timings of these events are parameterised and ranges of timings are simulated to discover the effect of varying the timings on system behaviour.
Futures• Analysis of oscillatory behaviour of current model• Introduction of noise into the system to investigate the stability of
procession vs degree of stochasticity• Investigation of effects of crowding and temporary blockageAim is to increase scope and realism of the model.
Richard Wilson
ReferencesAsenjo AB, Krohn N & Sosa H (2003) Configuration of the two kinesin motor domains during ATP hydrolysis. Nature Struct Biol 10, 836–842Gunawardena S & Goldstein LS (2004) Cargo-carrying motor vehicles on the neuronal highway: transport pathways and neurodegenerative disease. J Neurobiol 58
258-271Gunawardena S & Goldstein LS (2005) Polyglutamine Diseases and Transport Problems: Deadly Traffic Jams on Neuronal Highways. Arch Neurol 62, 46-51Hoenger A, Thormählen M, Diaz-Avalos R, Doerhoefer M, Goldie KN, Müller J & Mandelkow E (2000) A New Look at the Microtubule Binding Patterns of Dimeric
Kinesins. J Mol Biol 297, 1087-1103Ma YZ & Taylor EW (1997) Kinetic Mechanism of a Monomeric Kinesin Construct. J Biol Chem 272 (2), 717–723Stokin GB, Lillo C, Falzone TL, Brusch RG, Rockenstein E, Mount SL, Raman R, Davies P, Masliah E, Williams DS, et al (2005) Axonopathy and transport deficits early in
the pathogenesis of Alzheimer’s disease. Science 307, 1282–1288Vale RD (2003) The Molecular Motor Toolbox for Intracellular Transport. Cell 112, 467–480Yildiz A, Tomishige M, Vale RD & Selvin PR (2004) Kinesin Walks Hand-Over-Hand. Science 303 676-8.
IntroductionAn estimated 20 million people suffer some form of dementia, over 750,000 in the UK. Of the latter more than 400,000 are afflicted with Alzheimer’s disease (AD), an incurable, fatal condition that progressively destroys the mind over several years. Most cases of AD are late-onset. Why? What is it about ageing neurons that renders them susceptible? One can only speculate but there is a process especially important to neurons as opposed to other types of cell.Failure of microtubule active transport in axons has been proposed as the cause of AD (Gunawardena & Goldstein 2004,2005; Stokin et al 2005). Figure 1 illustrates normal and disrupted axonal active transport. Macromolecules are too large to diffuse through the crowded cytosol and so have to be actively transported to their functional destinations. Axons are long projections emanating from the cell body of the neuron.
In order to investigate active transport, a computational modelling approach has been taken. The initial focus is on the mechanism of motion of conventional kinesin (kinesin I). Figure 2 illustrates the motion of kinesin’s twin motor domains along a microtubule.
Results so far indicate 3 possible modes of operation: successful transport, diffusive behaviour, and rigidity.
Figure 1 Disruption of axonal active transport (Gunawardena & Goldstein 2005)
Figure 2 The kinesin walk (Hoenger et al 2000)
Microtubule active transportFigure 3 shows kinesin I, a typical motor protein: twin heads (blue) connected via short, flexible necks to a long coiled coil stalk (grey) ending in a fan tail (green).The tail binds the cargo, the heads alternately bind to and detach from the microtubule moving in a head-over-head fashion (figure 2).
Figure 3 Kinesin (Vale 2003)
0 1 2 3 4 5 6
KT KDP KDP KDu KD K0 KT
KDu KD K0 KT KDP KDP KDu
PurposeThe aim of my research is to increase our understanding of active transport and its modes of failure. The focus of this study is the mechanism of normal kinesin procession: how the motor protein walks along the microtubule (MT).
Goals achieved so far: to show that a leading theoretical model of procession works in silico to investigate the effects of altering the timing of events in the
processionary cycle to show that the timings that lead to procession in silico match
experimental data
Head state keyK represents the kinesin head bound to ATP, ADP.P, ADP or 0 (empty nucleotide binding site) and u is appended where a head is undocked
PredictionThe model predicts that procession occurs when the KDP -> KDu transition is delayed relative to the other state transitions. This is in accord with experimental data (Ma & Taylor 1997) who’ve measured a 13 ms undocking time compared to 2 – 7 ms for the timing of the other events for monomeric kinesin.