Embed Size (px)
Citation preview

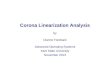
FIGURE 2.1 The purpose of linearization is to provide an output that varies linearly with some variable even if the sensor output does not.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.2 The Thévenin equivalent circuit of a sensor allows easy visualization of how loading occurs.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.3 If loading is ignored, serious errors can occur in expected outputs of circuits and gains of amplifiers.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.4 The simple voltage divider can often be used to convert resistance variation into voltage variation.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.5 The basic dc Wheatstone bridge.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.6 When a galvanometer is used for a null detector, it is convenient to use the Thévenin equivalent circuit of the bridge.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.7 For remote sensor applications, this compensation system is used to avoid errors from lead resistance.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.8 The current balance bridge.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.9 Using the basic Wheatstone bridge for potential measurement.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.10 A general ac bridge circuit.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.11 The ac bridge circuit and components for Example 2.10.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.12 (a) Bridge off-null voltage is clearly nonlinear for large-scale changes in resistance. (b) However, for small ranges of resistance change, the off-null voltage is nearly linear.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.13 Circuit for the low-pass RC filter.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.14 Response of the low-pass RC filter as a function of the frequency ratio.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.15 Circuit for the high-pass RC filter.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.16 Response of the high-pass RC filter as a function of frequency ratio.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.17 Cascaded high-pass RC filter for Example 2.13.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.18 Analysis of loading for a high-pass RC filter in Example 2.14.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.19 The response of a band-pass filter shows that high and low frequencies are rejected.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.20 A band-pass RC filter can be made from cascaded high-pass and low-pass RC filters.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.21 Band-pass response for the filter in Example 2.15.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.22 Response of a band-reject, or notch, filter shows that a middle band of frequencies are rejected.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.23 One form of a band-reject RC filter is the twin-T.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.24 The twin-T rejection notch is very sharp for one set of components.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.25 The schematic symbol and response of an op amp.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.25 (continued) The schematic symbol and response of an op amp.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.26 The op amp inverting amplifier.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.27 Nonideal characteristics of an op amp include finite gain, finite impedance, and offsets.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.27 (continued) Nonideal characteristics of an op amp include finite gain, finite impedance, and offsets.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.28 Some op amps provide connections for an input offset compensation trimmer resistor.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.29 Input offset can also be compensated using external connections and trimmer resistors.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.30 The op amp voltage follower. This circuit has unity gain but very high input impedance.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.31 The op amp summing amplifier.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.32 The op amp circuit for Example 2.18.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.33 A noninverting amplifier.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.34 The basic differential amplifier configuration.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.35 An instrumentation amplifier includes voltage followers for input isolation.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.36 Solution for Example 2.20.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.37 This instrumentation amplifier allows the gain to be changed using a single resistor.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.38 Bridge for Example 2.21.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.39 A voltage-to-current converter using an op amp.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.40 A current-to-voltage converter using an op amp. Care must be taken that the current output capability of the op amp is not exceeded.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.41 An integrator circuit using an op amp.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.42 This circuit takes the time derivative of the input voltage.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.43 A nonlinear amplifier uses a nonlinear feedback element.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.44 A diode in the feedback as a nonlinear element produces a logarithmic amplifier.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.45 Model for measurement and signal-conditioning objectives.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.46 One possible solution to Example 2.24.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.47 One possible solution for Example 2.25.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.48 ac bridge for Problem 2.14.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.49 Circuit for supplementary problems.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.50 System for Problem S2.4.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.51 Nonlinear amplifier using diodes for Problems S2.6 and S2.7.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.

FIGURE 2.52 Voltage versus pressure for Problem S2.7.
Curtis JohnsonProcess Control Instrumentation Technology, 8e]
Copyright ©2006 by Pearson Education, Inc.Upper Saddle River, New Jersey 07458
All rights reserved.