Embed Size (px)
Citation preview

Extension of Bolzano Search to Rectangles Which Preserves Rectangles as Iterates
Marvin D. 'houtt Southern Illinois University at Carbondale, Carbondale, Illinois 62901
Multivariable elimination algorithms, which may be regarded as generalizations of various one-dimensional search procedures, have not found wide application. A probable reason may be the generally very irregularly shaped regions of uncertainty that evolve iteratively in the procedures. Hence hope for practical salvage of this class of algorithms seems to lie in controlling the shape of the successively smaller regions of uncertainty. In this article an extension of Bolzano search to rectangles which preserves rectangular iterates is given. Since the result is essentially geo- metrical in nature, a geometric proof of this procedure is given. Hopefully the proof procedure will be of independent interest. A numerical illustration of the procedure is given for a game problem, such problems lending themselves to this method.
1. INTRODUCTION
The familiar bisection or Bolzano search algorithm is used whenever it is possible to determine which of the following hold for an optimal t* for each iterate t, in an algorithm:
t* I t , , t* 2 t,.
Wilde [8] has given a method of contour tangents which uses a multivariable elimination procedure and can be regarded a generalization of the Bolzano technique. Newman [ 5 ] follows a similar method. Fibonaccian interval search has also been generalized by Sugie [6] and Krolak and Cooper [4]. A recent discussion and bibliography on multivariable elimination procedures is contained in Beightler, Phillips, and Wilde [l].
The method discussed here is closest to that of Wilde [8]. This method was designed for objectives +(x) having strong unimodality and being differentiable on a decision set. His method proceeds as follows. Given a point xo in the region of uncertainty, let mi = 8+/8xilx0. He calls the hyperplane Z:==, mi(xj - xp) = 0 a contour tangent, and shows that an optimum x * can be identified as lying in one particular half-space corresponding to the contour tangent. Thus by, say, using the centroid of each new smaller region of uncertainty, these regions are approximately bisected successively and an optimal may be identified as closely as desired. Wilde also considers other point-selection rules: (a) midpoint, (b) minimax point, and (c) median. Since we will be dealing with rectangles, or, more generally, hypercubes, all four points are the same for the method to be proposed.
If the method of contour tangents is applied to a polygonal convex set in the
Naval Research Logistics, Vol. 34, pp. 593-603 (1987) Copyright 0 1987 by John Wiley & Sons, Inc. CCC 0028-1441/87/040593-11$04.00
594 Naval Research Logistics, Vol. 34 (1987)
plane, a sequence of nested polygonal sets is generated. In general, these may be of complicated shape, perhaps requiring a very large number of inequalities for representation at each iteration. The purpose of this article is to provide a modification of the contour tangent method which preserves rectangular uncer- tainty sets at each iteration.
Very few convergence results are available for this class of algorithms, New- man [5] being one of the few. However, we may note the following relevant result.
THEOREM 1: (Winternitz, see Ref. 3.) Suppose a plane-convex figure is divided into two parts by a line through its center of gravity, then the ratio of the two areas A and B so determined satisfies
We will not have occasion here to be especially interested in the properties of the objective function; we assume only that a contour tangent hyperplane is available at any point, and that it is possible to identify at least one half-space as containing one or more optimal points. Our interest is in the interative process which then evolves. However, for the purpose of the game-theory example to follow it will be useful to note the following theorem.
THEOREM 2: Let +(x) be concave on S C R". Suppose the linear function C Xj(xi - xp) + +(xo) is tangent to the graph of +(x ) at xo. Let x * be such that 4(x*) = maxXEs +(x) . Then
x Xix7 2 z Xi$ .
PROOF: By concavity we have, for all x E S,
Hence
Thus
Clearly the hi are derivatives when the gradient exists. As an example in which the hi are available without the gradient existing consider functions of the form 4(x) = min,,, (Z;=l x j f i (a ) ) . One may readily check that 4(x) is a concave function of x for arbitrary choices of bounded functions fi(a) on a compact set A. Suppose min,,, C xpfj(a) = Z xPfi(a0) = +(xo). Then, for all x ,
C xi f i (ao) 2 min x i f i ( a ) = +(x) .

Troutt: Extension of Bolzano Search 595
Since
it follows that the linear function X xifi(ao) is tangent to +(x) at xo. Expressing C xifi(ao) as X (xi - $)fi(ao) + +(xo), it is clear that fi(ao) may be taken as the hi in Theorem 2. Since the minimizing a. need not be unique in general, the tangent linear function need not be unique, and +(x) need not be differ- entiable.
As noted above, direct application of the method of contour tangents to a polygonal convex set in the plane might lead to an increasing number of in- equalities and corner points required to describe the successive iterates. The following heuristic argument, based on the Martingale theorem of probability theory (see Breiman [2]) leads one to believe that at most four corner points might suffice. In Section 2 a modification of the iteration procedure which actually maintains rectangular uncertainty sets throughout is proven. Hence the following heuristics are a motivation for the desired results.
Assume for definiteness that the problem is
max + ( X , Y ) , (x .y )ER
where R is a polygon [a,b,c,d]. Assume that the angle 8 of inclination of the bisecting lines obtained is distributed absolutely continuously on [0,2n]. Let X,, be the number of extreme points at iteration n. A line through the center of gravity will (except for 8 in a set of measure zero) introduce two new extreme points and discard half of the original extreme points on the average. Thus
E(X,+,IXl, . . . ,Xn) = M,, + 2 (almost surely) 5 X,, if X,, 2 4.
Hence if X,, 2 4 then the reader may check that {X,,} is a Martingale process converging to a limiting random variable whose mean is 4.
2. A MODIFICATION OF THE ITERATION PROCEDURE
The heuristic reasoning above leads to the question of whether there is an algorithm which preserves exactly four extreme points at each iteration. We now show that a procedure for rectangles can be given with rectangles as iterates except for some possible one-dimensional searching. A geometric argument will be used.
Let R[a,b,c,d] be the current iterate of the algorithm and assume for defi- niteness that the contour tangent is oriented as in Fig. 1, with the feasible half- plane as that one containing the corner a. The center of gravity is the point g.
Select a number r E (1,l) arbitrarily. Denote by lab1 the length of segment ab. The iteration will replace R[a,b,c,d] by a new rectangle of area less than or equal to r times that of R. Briefly, the algorithm selects the smallest rectangle contacting the feasible part of the current iterate if it is possible to decrease the

596
Figure 1.
area by a factor of r or less and its center of gravity is a feasible point. Otherwise a step toward the farthest feasible corner is taken.
THEOREM 3: In an optimization problem on a rectangle R[a,b,c,d] sup- pose each ( x * , y * ) € A* R is a solution. Suppose at each point ( x , y ) of R there are scalars a,p such that a ( x * - x ) + p(y* - y) 2 0 for all (x * ,y * ) E A*. Then given r € (4 , l ) we may either determine a rectangle R‘ of area r times area of R with R’ intersecting A* within two evaluations of the scalars a and (3, or else there is a sequence of lines such that if none of the lines can be used to construct a suitable rectangle which intersects A*, then the lines converge to a line intersecting A*.
PROOF: The scheme of the proof will be to examine all cases arising due to differing orientations of the contour tangent L and to show in each case how to obtain the new smaller rectangular region of uncertainty. We denote by K the contour tangent for the next iterate. Often it will be necessary to consider the relative orientations of K and L.
CASE I . lael/la6[ I r. Let e’ be the point e translated across the rectangle by distance [bcl. It is clear now that rectangle R[a,e,e’,d] is a suitable new iterate which contains an optimal point and decreases the area of search by the factor r < 1. If this situation always arises, then the algorithm converges to a point which is necessarily an optimal, or to a line segment to which the one-dimensional bisection algorithm may be applied.
CASE 2. lael/labl 2 r. Consider the point m midway between a and g as in Fig. 2. Let a new contour tangent K be obtained through point m. Two subcases are distinguished depending on whether corner a is in the feasible half-plane or not.
CASE 2(a). Here we assume the contour tangent K includes corner a in its feasible region. We consider the extreme positions of the line K through coun-

Troutt: Extension of Bolzano Search
\ L
597
a
\ \ K \
Figure 2.
terclockwise rotations of its possible positions under the assumption that corner a is included in its feasible region.
First suppose the line K coincides with the segment from m to g. Here it is assumed that the feasible region lies above line K. In this case it is clear that an optimal may be found in rectangle R[a,g,g,d] whereg andg are the projections down and up of g. Also, R[a,g,g,d] has half the area of R[a,b,c,d] and forms a suitable new iterate.
As the possible positions of K rotate counterclockwise, the intersection point of K and L can be seen to similarly determine smaller rectangles up to the position in which K is vertical.
Now further rotation of K up to a position in which it intersects the corner d can be checked to intersect segment ab at a distance of Q of lab1 from a , so that the area can be reduced to one-third by the appropriate new rectangle.
Further rotation can be allowed until the intersection of K with segment a6 occurs at a point of distance rlab) from a. A simple calculation shows that then K intersects segment ad at a point rladll(4r - 1) distant from a. Since r > f this side is of length not exceeding rlad( and a suitable iterate can be constructed.
Continuing the rotation up to a position parallel with segment a6 will evidently produce rectangles of smaller area. As rotation is allowed up to the final position of coincidence with segment mg it is clear there is an optimal in the rectangle R’[a,b,g,g] where g, g are the left and right parallel projections of g to the side of the rectangle ana R’ has area half that of R[a,b,c,d].
CASE 2(b). Now suppose the feasible region determined by line K at m does not contain comer point a. We begin a one-dimensional search procedure using Bolzano search of the segment mg, with a decision procedure as follows. At each point iterate x,, determine a contour tangent J,,. If J,, is coincident with segment mg then clearly a new rectangle iterate can be constructed with area
598 Naval Research Logistics, Vol. 34 (1987)
' K = T ,
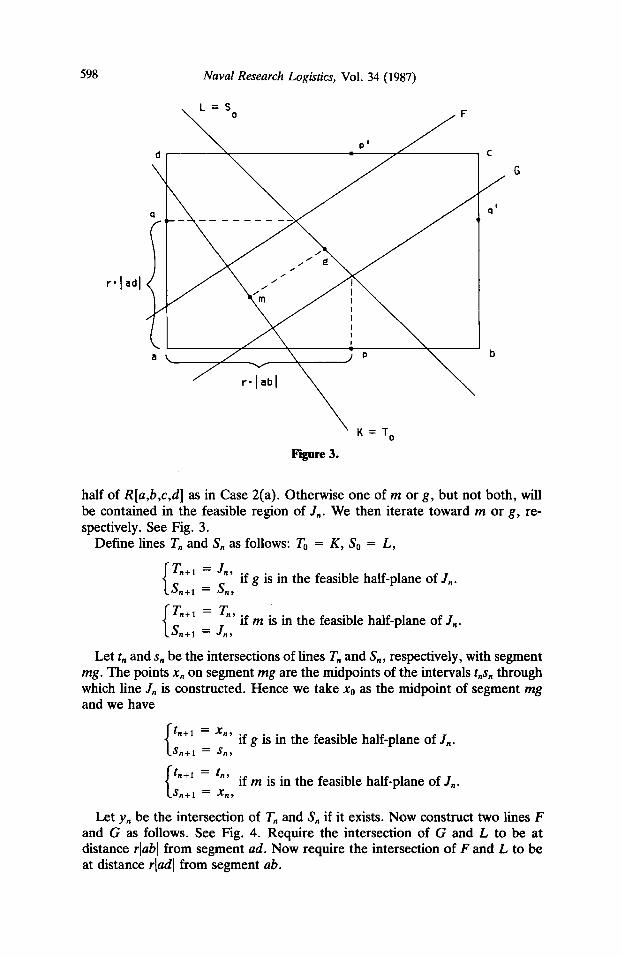
Figure 3.
half of R[a,b,c,d] as in Case 2(a). Otherwise one of m or g , but not both, will be contained in the feasible region of J,. We then iterate toward m or g , re- spectively. See Fig. 3.
Define lines T, and S, as follows: To = K , So = L,
T'+1 = Jn, if g is in the feasible half-plane of .I,.
if m is in the feasible half-plane of J,.
Let tn and s, be the intersections of lines T, and S,, respectively, with segment mg. The points x, on segment mg are the midpoints of the intervals tnsn through which line Jn is constructed. Hence we take xo as the midpoint of segment mg and we have
if g is in the feasible half-plane of J,. t n + l = x n ,
Sn+1 = sn7
if m is in the feasible half-plane of J,. t n + l = t n ,
s n + 1 = x n ,
Let y, be the intersection of T, and S, if it exists. Now construct two lines F and G as follows. See Fig. 4. Require the intersection of G and L to be at distance r(abl from segment ad. Now require the intersection of F and L to be at distance r(ad( from segment ab.

Troutt: Extension of Bolzano Search 599
Suppose y, lies between F and G for some n. We consider the cases as y, lies on, above, or below segment mg. If y, lies on segment mg then T, and S, coincide. In the case wheIe they have opposite feasible half-planes, then an optimal lies on mg. If their common feasible half-plane is above mg, then evidently the rectangle R[a,g,g,d] is a suitable next iterate of area half that of R[a,b,c,d]. If their common feasible half-plane is beneath mg, then R[a,b,g,g] is clearly a suitable iterate.
If y , lies above rng then the feasible set determined by T, and S, can be seen to be contained in R[a,b,g' ,g]. Similarly, if y , lies below mg, then the feasible set can be seen to lie in R[a,p,p',d]. Now suppose that either y , lies outside the region between F and G for all n or does not exist. We will give a limiting line on which an optimal may be found.
We may dismiss the case of T, and S, coincident with mg as above. Thus there is an intersection of T, with F,tland with G J ~ . Similarly, there is an intersection of S, with F,Z; and with G,& Let t, and be the intersections of F and G, respectively, with J,. See Fig. 4.
We claim that Z: + 2, where 2, is a point on line F, and that an optimal lies
Figure 4.

600 Naval Research Logistics, Vol. 34 (1987)
on the line through Z, and x,, where X , is the limit of the bisection iterates x, on mg. Assume for definiteness that the feasible half-planes are as indicated by the arrows in Fig. 4. Note that Zi+l is on segment Z,,Ti. Similarly is on segment &;T. To see this, note that intersects mg midway between t,, and s, by construction. If Zn+l is outside segment Zzi, say, to the right of g, then J,,+ , intersects S,, in the region between F and G which has been dismissed. The other cases are similar.
We must finally show that IZ$?;SI + 0. It follows that the segments 22: tend to a point Z,. Observe from Fig. 4 that at least one of the following relations hold for each n:
I Y Z i l 5 ltnsnl or ItnT4iI 5 ItnsnI,
where equality holds in both when T, and S, are parallel. Since lt,,s,l + 0, it follows that at least one of the following hold:
I~,'zil --f 0 or &;TI +- 0.
Without loss of generality, suppose Z,Ti tends to the limit point Z,. The limiting set determined by T,, S, and the original rectangle R is evidently
a line segment coinciding with the line through x , and Z,. Since each of these sets contains an optimal, so does the line through x, and 2,. This concludes the proof.
REMARK: The lines F and G used in the proof are not needed for the algorithm itself. It is plausible to conjecture that the analogous algorithm for n- dimensional cubes also converges to a set of dimension at most n - 1 containing an optimal.
3. AN APPLICATION TO A GAME PROBLEM
A modification of the algorithm may be used to approximate the optimal strategy of Player I in the following game. Player I secretly selects i = 1, 2, or 3. Player I1 secretly selects a point x E [0,1]. Then player I receives pi(x) from player 11, where pi (x) are three given polynomials. The value u of the game is
It is the best average payoff that Player I can assure against arbitrary strategies of Player 11. Any probability vector ( At , A:, A:) for which u = minxE~o,ll{ A;pl(x) + A;pz(x) + A3*p3(x)} is an optimal strategy for Player I. This game has been called an S3 game in [7] where an algorithm for its value was given. Here we consider direct approximation of the optimal strategy.
We have

Troutt: Extension of Bolzano Search 601
* e \ b
* al :d + B * = 1
Figure 5.
Thus the maximum of a concave function of type discussed in Section 1 is sought for a triangular set in the aP plane.
Let (a$) be a point iterate of the algorithm and suppose min,,Io,ll {a(pl(x) - p3(x) ) + P(p2(x) - p 3 ( x ) ) + p3(x)} is attained at xi , j = 1, . . . ,m. Then for each j we have as in Section 1,
(a* - a>(pl(xj) - ~ 3 ( x j ) ) + (P* - P)(pdxj) - ~ 3 ( x j ) ) 2 0. Hence any xi may be used to construct the contour tangent and feasible half- plane. Clearly there is at least one xj in all cases.
We then assume that the triangular set arises as the first iterate of the cor- responding problem on the rectangle R[(O,O),(l,O),(l,l),(l,O)] where it may be assumed that a* + p* 5 1 is the bisecting half-plane obtained at the point iterate (a,$). Thus by the algorithm the point rn = (4,t) is the next point iterate.
Now assume that R[a,b,c,d] is an iterate arising subsequently. It will have sides parallel to the original rectangle but may intersect the line a* + p* = 1. In case R is wholly contained in a* + p* 5 1 we may clearly proceed with the algorithm without change. The case in which the intersection of a current rec- tangle iterate with a* + p* 5 1 is empty will not arise by requiring the centers of gravity of each iterate to be feasible. The three other cases are shown in Figs. 5, 6, and 7.
For case (i), Fig. 5, we have the center of gravity g as a feasible point, and we may continue to bisect R. For case (ii), Fig. 6, the center of gravity g’ of R[u,b’,c’,d] clearly lies below the line H: a* + P* = 1, and is thus a feasible point. For case (iii), Fig. 7 , we may similarly reduce the current iterate R to R[u,b’,c’,d’] and use the point m as the next iterate as in the initial assumption. Thus in each case one may replace the current rectangle iterate by one whose center of gravity is a feasible point.
To illustrate, let us compute three point iterates for the game with p, (x) = 3x - 1,p2(x) = -a2 + x + 3, andp3(x) = x3 + x2 - 4x + 2. We may take r = 4 as the convergence factor. The first point iterate will be from the above discussion, the point (t,4). We find that min,,Io,ll {4(p l (x) - p 3 ( x ) ) + i (p2 (x ) - p3(x) + p3(x)} is attained at x = a where to three decimal points p1 - p 3 = 1.507 and p2 - p 3 = 2.540. Hence 1.507(a* - 1) + 2.540(P* - t ) 2 0 is the

602 Naval Research Logistics, Vol. 34 (1987)
Figure 6.
feasible half-plane at this point. Since (0,O) is not feasible, no rectangle iterate can be obtained so the next iterate is the point (Q,Q). Here min,,Io,ll {Q(pl (x) - p3(x)) + $(p*(x) - p3(x) ) + p3(x)} is attained at x = 0 where p , - p 3 = -3 andp, - p3 = 1. Thus -3(a* - I) + (@* - Q) 2 0 is the next feasible half- plane. We find that the line -3(a* - Q) + @* - Q = 0 intersects a* + p* = 1 at the point (&,A), so that the rectangle R[(O,O),(i5,0),(;$,1),(0,1)1 is a suitable iterate. Thus the third point iterate is (B,t).
4. CONCLUDING REMARKS AND OPEN QUESTIONS
It will remain for further computational experience to determine good choices of r the area reduction factor. However, the reader will note that if r is chosen close to 1.0, then there will be a relatively small reduction in areas for the next uncertainty set, but that the simpler procedures for constructing the next iterate will more likely prevail. Also, it appears less likely to require search steps. On the other hand, choosing r close to 0.5 may give faster gains in terms of area reduction of the next iterate, but work against the other advantages above. Without further detail on the relative likelihood of these occurrences, a naive choice of r = 0.75 was used in the illustrative example above. It would be of interest if an optimal value of r could be suggested by further research. We may conjecture that an optimal r for a given iterate may depend on the shape of the current iterate.

Troutt: Extension of Bolzano Search 603
REFERENCES
[ l ] Beightler, C. G., Phillips, D. T., and Wilde, D. J., Foundations of Optimization,
[2] Breiman, L., Probability, Addison-Wesley, Reading, MA, 1968. [3] Iaglum, I. M., and Boltyanskii, V. G., Convex Figures, Translation by Paul J. Kelly
[4] Krolak, P., and Cooper, L., “An Extension of Fibonnacian Search to Several Vari-
[5] Newman, D. J . , “Location of the Maximum on Unimodal Surfaces,” Journal of the
[6] Sugie, N., “An Extension of Fibonnacian Searching to Multi-Dimensional Cases,”
[7] Troutt, M. D., “Algorithms for Non-convex &-Games,” Mathematical Programming,
[8] Wilde, D. J., “Optimization by the Method of Contour Tangents,” American Institute
2nd ed. Prentice-Hall, Englewood Cliffs, NJ, 1979.
and Lewis F. Walton, Holt, Rinehart I% Winston, New York, 1961.
ables,” Communications of the Association for Computing Machinery, 6,639-641.
Association for Computing Machinery, l2(3), 395-398 (1965).
IEEE Transactions on Automatic Control, AC-9,105 (1964).
14,332-348 (1978).
of Chemical Engineering Journal, 9(2), 186-190 (1963).
Manuscript received February 19, 1986 Revised manuscript received June 13, 1986 Accepted September 5 , 1986





![The Existence of (s, t)-Monochromatic-rectangles in a 2 ... · monochromatic-rectangles in [3], we define the generalized monochromatic-rectangles and discuss the existence of such](https://img.dokumen.tips/doc/110x75/5fa9392818e985551817b402/the-existence-of-s-t-monochromatic-rectangles-in-a-2-monochromatic-rectangles.jpg)























