Embed Size (px)
Citation preview

Department of Civil and Environmental Engineering
University of California, Berkeley
Experience with OpenFresco: Reinforced Concrete Bridge
Vesna Terzic

Objective Can a damaged bridge carry a heavy truck after
an earthquake?
It is very difficult to physically model the
bridge with the (moving) truck on it
hybrid simulation is
the way to go
2

Components of a Hybrid Simulation
3
Schellenberg, 2008

Five span, single column bent overpass bridge
Prototype Bridge
4
Ketchum et. al., 2004

Hybrid Model of the Bridge
5
Analytical model (full scale)
Physical model (SF=4.6875)
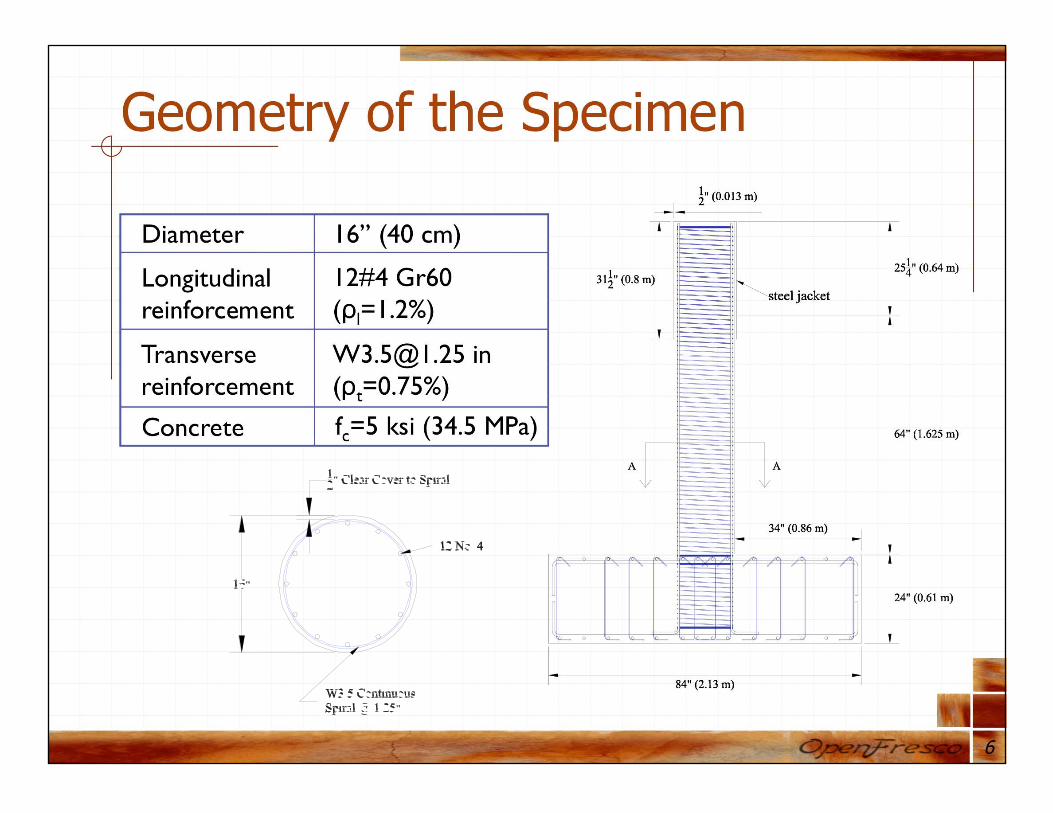
Geometry of the Specimen
6
Diameter
Longitudinal reinforcement
Transverse reinforcement
Concrete
16’’ (40 cm)
12#4 Gr60 ( l=1.2%)
[email protected] in ( t=0.75%)
fc=5 ksi (34.5 MPa)
Calibration of the Analytical Model Bridge columns – nonlinear elements
Damage is concentrated at plastic hinges
To calibrate analytical model (used in HS)
bi-lateral quasi-static test was performed
Identical specimens
7
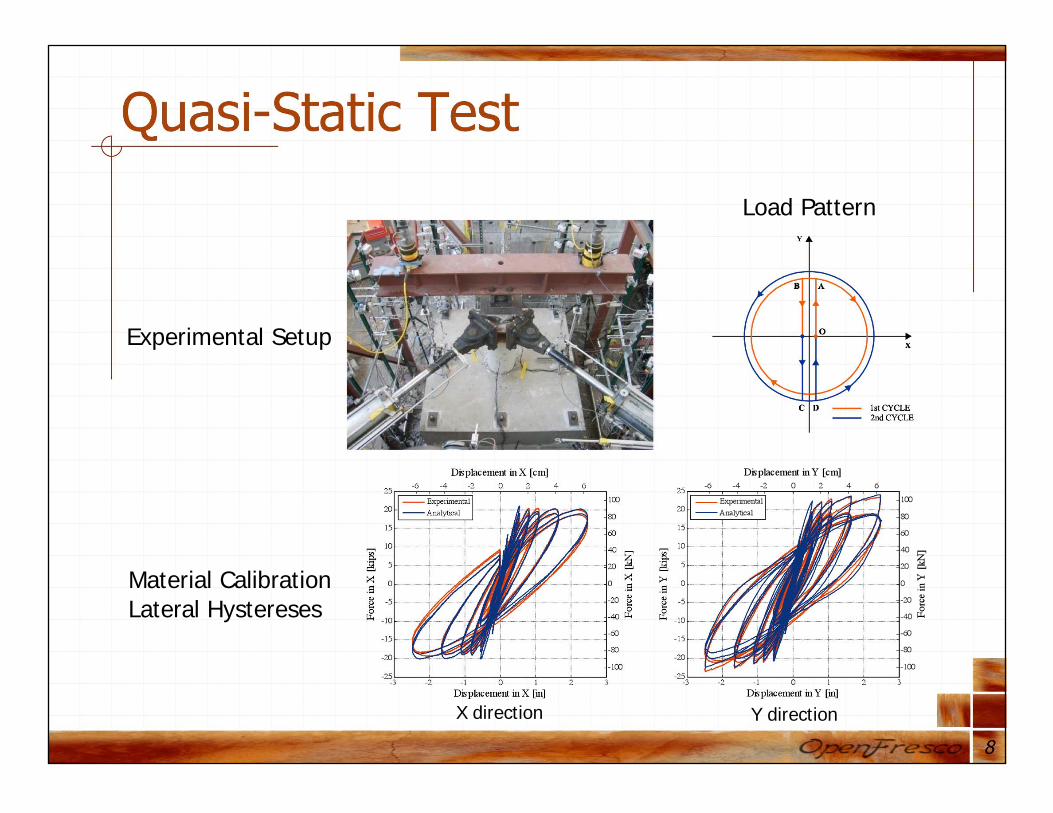
Quasi-Static Test
8
Experimental Setup
Load Pattern
Material Calibration
Lateral Hystereses
X direction Y direction

Analytical Portion of the Hybrid Model
Modeled in OpenSees (3D model)
Deck: linear elastic elements
Columns: force based nonlinear beam-
column elements (calibrated based on quasi-static test)
Abutments: rollers in both directions
Integration scheme: Alpha-OS ( =0.9)
9

Physical Portion of the Hybrid Model
Scaled model (SF=4.6875)
OpenFresco was used for hybrid simulation
10
Experimental beam-
column element

Loads Applied on the Bridge Gravity load
Earthquake load in X and Y direction
11
Truck load

What are we going to control?
12
There are 6 DOFs that could be controlled at the
top node of the column:
ux , uy , uz , x , y , z
We are controlling 4 DOFs:
ux , uy , x , y
Assuming that rotation ( z ) and displacement (uz ) are small enough that they can be neglected.

ExpSetup: Lateral Displacements To control the 4 chosen DOFs we will use 4 actuators:
13
Rigid Body

ExpSetup: Axial Load
14
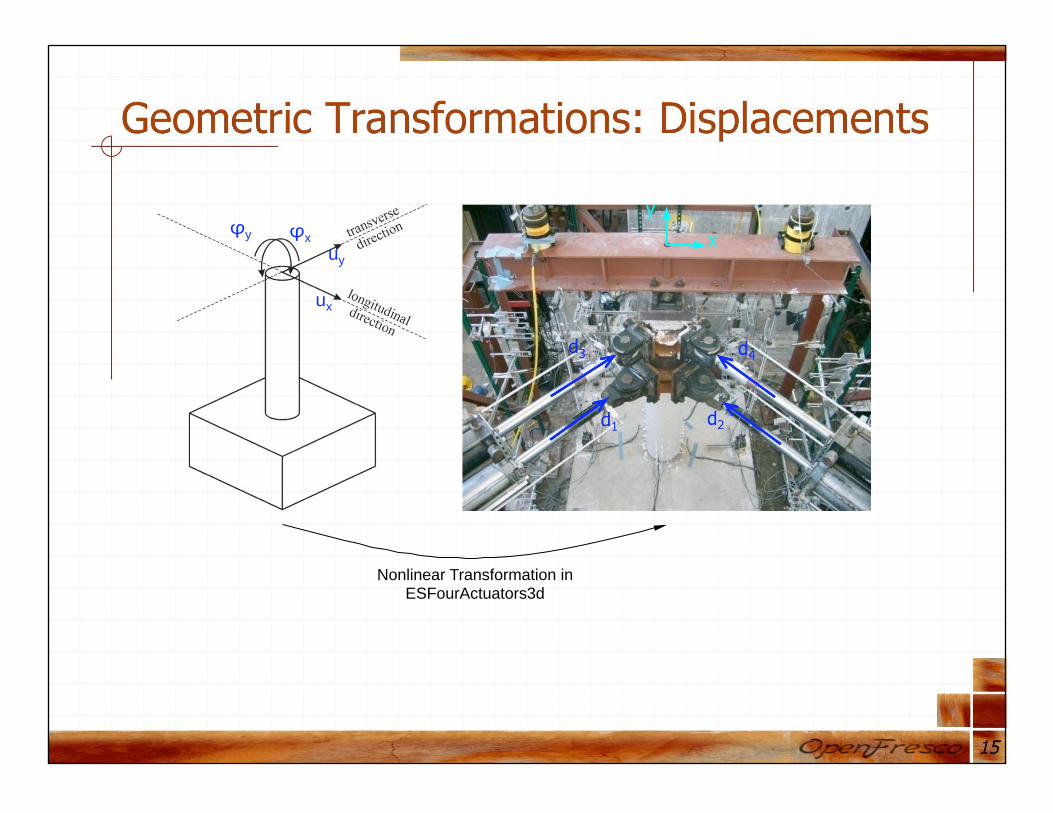
Geometric Transformations: Displacements
15
d1 d2
d3 d4
x
y
Nonlinear Transformation in
ESFourActuators3d
ux
uy
x y

X direction Y direction
Geometric Transformations: Forces
16
Px Py Note: Axial force will
also create moments at CP
Deformed configuration
Initial configuration
f1 f2
f3 f4
Nonlinear Transformation in
ESFourActuators3d
qx
qy
mx my
f6 f5
x
y
OpenFresco Interaction with OpenSees
In FE model (OpenSees framework):
loadPackage OpenFresco
Define experimental control
Define experimental setup
Define experimental site
Define experimental element
17

OpenFresco Interaction with OpenSees
In FE model (OpenSees framework):
loadPackage OpenFresco
Define experimental control
Define experimental setup
Define experimental site
Define experimental element
18

OpenFresco Experimental Setup ESElementName.h
ESElementName.cpp
TclExpSetupCommand.cpp
19

OpenFresco: ESFourActuators3D.h
20

21
OpenFresco: ESFourActuators3D.h

22
OpenFresco: ESFourActuators3D.cpp
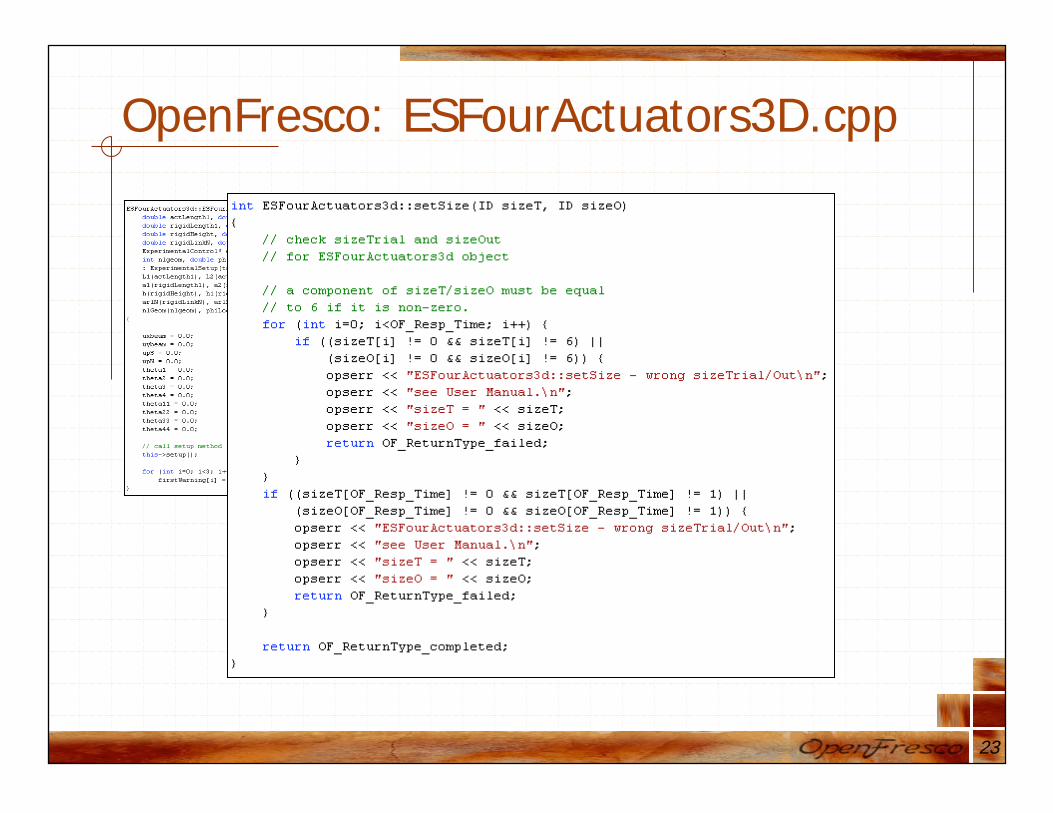
OpenFresco: ESFourActuators3D.cpp
23
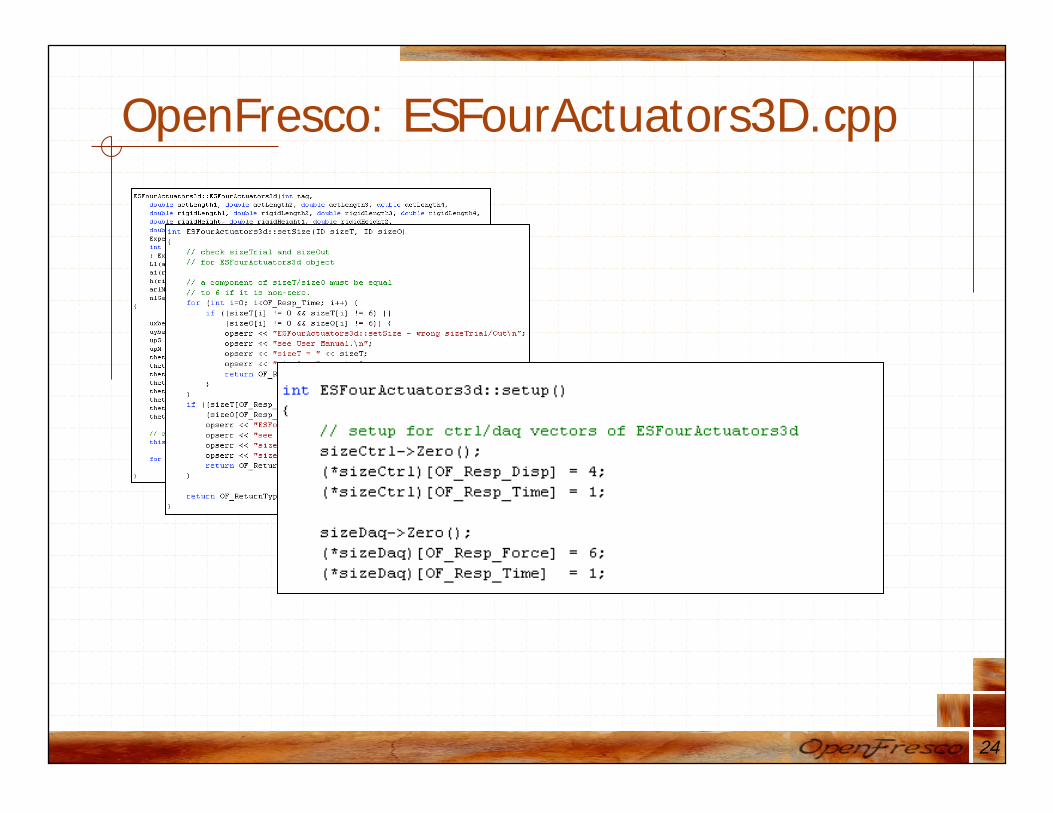
OpenFresco: ESFourActuators3D.cpp
24

25
OpenFresco: ESFourActuators3D.cpp

26
OpenFresco: ESFourActuators3D.cpp
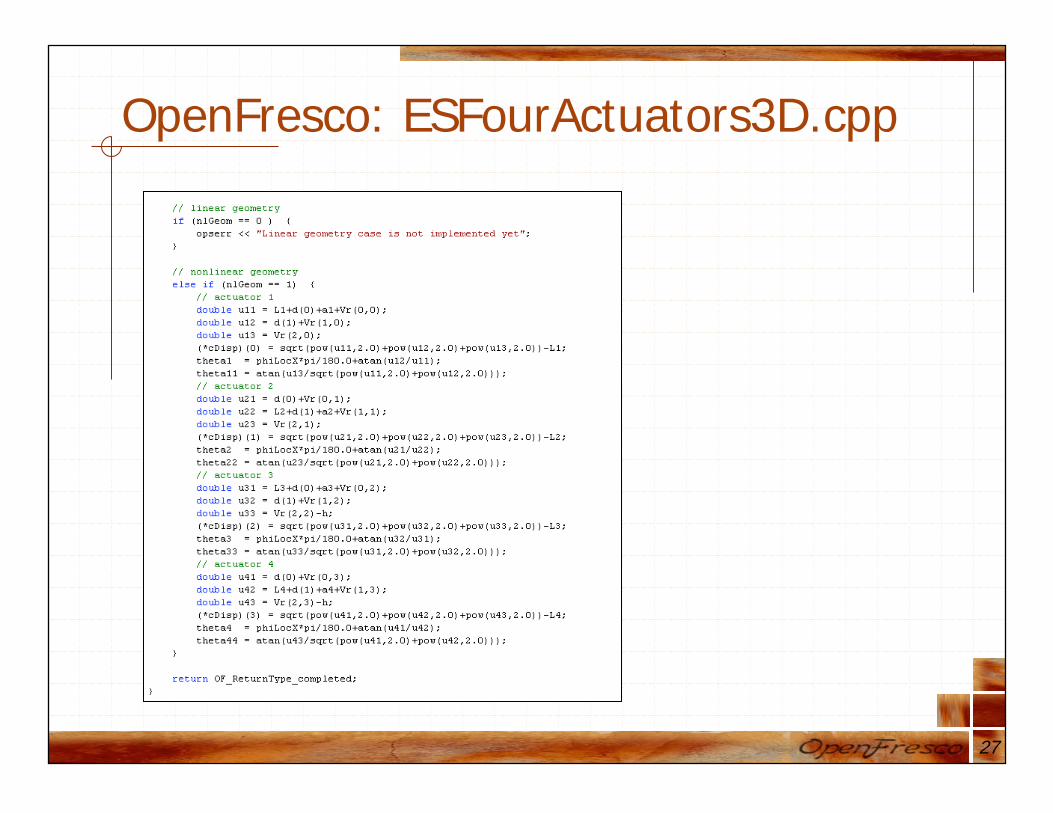
27
OpenFresco: ESFourActuators3D.cpp

28
OpenFresco: ESFourActuators3D.cpp

29
OpenFresco: ESFourActuators3D.cpp

Definition of ExpSetup in TCL Script
30
Units in analytical model: kN, m Units in experimental setup: kips, in
Scaling factors: Sd=4.6875 Sf=1/Sd
2
Sm=1/Sd3

Results: Displacements
31

Results: Forces
32
Four truck positions on a bridge

Department of Civil and Environmental Engineering
University of California, Berkeley
Questions? Thank you!
http://openfresco.neesforge.nees.org
The development of OpenFresco has been sponsored in parts by the
National Science Foundation through grants from the NEES Consortium, Inc.





























