Embed Size (px)
Citation preview

ARTICLE IN PRESS
0304-4076/$ - se
doi:10.1016/j.je
�CorrespondE-mail addr
Journal of Econometrics 143 (2008) 375–395
www.elsevier.com/locate/jeconom
Examining bias in estimators of linear rational expectationsmodels under misspecification
Eric Jondeaua, Herve Le Bihanb,�
aFaculty of Business and Economics, University of Lausanne and Swiss Finance Institute, Extranef 232, CH 1015 Lausanne, SwitzerlandbService de Recherche en Economie et Finance, Direction de la Recherche, Banque de France, 31 rue Croix des Petits Champs,
75049 Paris Cedex 01, France
Available online 8 January 2008
Abstract
Most rational expectations models involve equations in which the dependent variable is a function of its lags and its
expected future value. We investigate the asymptotic bias of generalized method of moment (GMM) and maximum
likelihood (ML) estimators in such models under misspecification. We consider several misspecifications, and focus more
specifically on the case of omitted dynamics in the dependent variable. In a stylized DGP, we derive analytically the
asymptotic biases of these estimators. We establish that in many cases of interest the two estimators of the degree of
forward-lookingness are asymptotically biased in opposite direction with respect to the true value of the parameter. We
also propose a quasi-Hausman test of misspecification based on the difference between the GMM and ML estimators.
Using Monte-Carlo simulations, we show that the ordering and direction of the estimators still hold in a more realistic
New Keynesian macroeconomic model. In this set-up, misspecification is in general found to be more harmful to GMM
than to ML estimators.
r 2007 Elsevier B.V. All rights reserved.
JEL: C13; C22; E31
Keywords: Rational expectations model; GMM estimator; ML estimator; Specification bias
1. Introduction
In this paper, we investigate the asymptotic bias of some well-known alternative estimators in rationalexpectations (RE) models under misspecification. We consider the so-called ‘‘hybrid’’ (or second-order) linearRE model
Y t ¼ of EtY tþ1 þ obY t�1 þ bZt þ et, (1)
where Y t denotes the dependent variable, Zt the forcing variable, et the error term, and Et the expectationconditional on the information available at date t. This framework has been widely used in theoretical as wellas empirical work, because it provides a convenient framework for representing many macroeconomic
e front matter r 2007 Elsevier B.V. All rights reserved.
conom.2007.11.004
ing author.
esses: [email protected] (E. Jondeau), [email protected] (H. Le Bihan).

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395376
behaviors. When expectations are unobserved, the estimation of (1) typically involves either the generalized methodof moment (GMM) or a full-information maximum-likelihood estimation (MLE). With GMM, the expectedvariable is expressed as a function of an instrument set, without imposing more structure on the model. WithMLE, the model is solved in terms of observed variables, taking into account the actual structure of the model.1
The general properties of GMM and ML estimators are rather well known for several kinds ofmisspecification. The asymptotic power properties of specification tests with GMM and MLE are investigatedby Newey (1985a, b), respectively. White (1982) addresses the consequences of distributional misspecificationon the ML estimator and examines how to detect such misspecification. Maasoumi and Phillips (1982) andHall and Inoue (2003) derive the limiting distribution of instrumental variables (IV) and GMM estimatorsunder the assumption of non-local misspecification, when the orthogonality conditions are not satisfied. Toour knowledge, the comparison of GMM and ML estimators has not yet been performed in the context ofmisspecified RE models. As we will argue, the fact that in this context the endogenous regressor is the expectedlead of the dependent variable has important consequences on the bias of the estimators. More specifically, weanalyze the consequences of omitted dynamics on the asymptotic bias of both GMM and MLE in a verystylized set-up. In this context, these two approaches can be viewed as alternative procedures to perform theprojection of the expectation terms onto a given information set. Within this framework, we derive theanalytical expression of the asymptotic bias, and we show that the estimators of the forward-lookingparameter of are asymptotically biased in opposite directions with respect to the true value of the parameter.
The results presented in this paper help to rationalize some recent empirical evidence in the estimation ofNew Keynesian macroeconomic models. Key components of these models, such as the hybrid Phillips curve(e.g., Fuhrer, 1997; Galı and Gertler, 1999) and the hybrid aggregate demand equation (e.g., Fuhrer, 2000;Fuhrer and Rudebusch, 2004), are prominent illustrations of second-order RE models. It turns out that theGMM and MLE procedures produce a sizeable discrepancy in the estimation of the forward-lookingparameter of .
2 We show that the sign and the magnitude of the empirical discrepancy are actually consistentwith our analytical results.
The structure of the paper is as follows. Section 2 presents a stylized hybrid RE model, describes the estimators,and investigates the finite-sample properties of GMM and ML estimators. Section 3 explores howmisspecification does affect the asymptotic bias of these estimators. Several analytical results concerning theranking of estimators are presented, and we propose a quasi-Hausman test for misspecification in RE models. InSection 4, we examine the properties of a multivariate New Keynesian model, inspired by Rudebusch (2002a, b),which allows to investigate omitted dynamics. Using Monte-Carlo simulations, we illustrate that the main resulton the ordering of estimators carries on to this more realistic, analytically intractable, multivariate model. In thatset-up, misspecification is also found to be more harmful to GMM estimators than to the ML estimator, in thesense that it yields larger biases on the forward-looking parameter of . Section 5 provides concluding remarks.
2. A stylized hybrid RE model
In this section, we describe a simplified hybrid RE model, in which analytical results on the asymptotic biasof estimators under misspecification can be derived.
2.1. The model
The model includes a hybrid equation with one lag and one lead and the dynamics for the forcing variable asfollows:
Model 1:
Y t ¼ of EtY tþ1 þ ð1� of ÞY t�1 þ bZt þ et, ð2Þ
Zt ¼ rZt�1 þ ut, ð3Þ
1See for instance Pesaran (1987) for a review of both approaches.2See, for instance, Jondeau and Le Bihan (2005) and Nason and Smith (2005) for the hybrid Phillips curve, and Fuhrer and Rudebusch
(2004) for the aggregate demand equation.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 377
where 0pof p1 and jrjo1. Error terms et and ut are contemporaneously and serially uncorrelated centerednormal random variables, with s2e ¼ E½e2t � and s2u ¼ E½u2
t �. The sum of the forward-looking and backward-looking parameters is assumed to be equal to one, in accordance with many theoretical derivations in the NewKeynesian macroeconomics (see, e.g., Christiano et al., 2005).3 This assumption provides an identifyingrestriction required here given the AR(1) specification for the forcing variable.4 In addition, it allows to obtainanalytical expressions for the biases under misspecification. We assume for the moment that Zt is stronglyexogenous with respect to the parameters of the hybrid equation.
The properties of this model are derived from the characteristic polynomial of (2) given byð1� of L�1 � ð1� of ÞLÞ ¼ 0, with roots j1 ¼ ð1� of Þ=of and j2 ¼ 1. According to the conditions forexistence and uniqueness of solution to RE models, established by Blanchard and Kahn (1980), two situationscan be encountered. When of p0:5 (i.e., j1X1), the solution is unique, but Y t is a non-stationary processregardless of the dynamics of Zt. When of 40:5 (i.e., j1o1) and jrjo1, existence of a stationary solution isguaranteed, but there are in fact infinitely many solutions characterized by sunspot shocks. A special solutionobtains when sunspot shocks are disregarded. This so-called fundamental solution is given by
Y t ¼ j1Y t�1 þ yZt þ ~et, (4)
with y ¼ b=ðof ð1� rÞÞ and ~et ¼ et=of . We also define ~s2e ¼ E½~e2t � ¼ s2e=o2f . In empirical work, the presence
of sunspot shocks may be an issue. In our subsequent analysis, based on Monte-Carlo simulations, wewill simulate a DGP that coincides with the fundamental solution. Finally, our maintained assumptions forModel 1 are 0:5oof p1 (or, equivalently, 0pj1o1).5
2.2. GMM and ML estimators
The estimation of (2) is typically based on two alternative procedures, namely GMM and MLE, to copewith the correlation of the regressors with the error term e0t ¼ et � of ðY tþ1 � EtY tþ1Þ. In this section, wedescribe very simplified versions of these estimators that sketch their actual working.
GMM relies on using a set of instruments W t uncorrelated with the error term e0t but correlated with theendogenous regressor (Y tþ1) to form moment conditions:
E½W t � ðY t � of Y tþ1 � ð1� of ÞY t�1 � bZtÞ� ¼ 0. (5)
Since two parameters (of and b) have to be estimated, at least two instruments are required to achieveidentification. The optimal instrument set for (2) is given by the two regressors fY t�1;Ztg in the reduced form(4). In this context, additional instruments would be redundant (see Breuch et al., 1999). Since the model is justidentified, the probability limits (Plims) of the estimators are directly obtained by solving the momentconditions (5). Although the GMM approach reduces to IV estimation in this framework, the multivariateextension in Section 4 resorts to the genuine GMM estimator, so that we stick to the label GMM throughoutthe paper.
The MLE relies on using (3) to solve (2) iteratively forward. Since shocks are assumed to be uncorrelated,the full-information MLE reduces to a two-step approach in this context. In the first step, parameters j1 and yin (4) and r in (3) are estimated under the constraints 0pj1o1 and jrjo1.6 In the second step, estimators ofof and b are obtained using the relations of ¼ 1=ð1þ j1Þ and b ¼ yof ð1� rÞ. The ML estimator is obtainedunder the assumption that forecasts are fully model consistent. The crucial difference between GMM andMLE is that MLE imposes some constraints upon the way Y tþ1 is projected onto the state variables,
3Parameters of and b may be functions of ‘‘deeper’’ parameters that characterize the preferences and constraints of agents. The results
in this paper can in many cases be cast in terms of these deep parameters. However, the mapping of deep parameters to of and b is specific
to each application, so that we focus on the latter for more generality.4See Pesaran (1987) or Mavroeidis (2005) for a discussion of the identification issue in RE models.5It may be argued that the stationarity assumption may itself induce another misspecification, that we do not explore in this paper,
however. Notice that, for more general dynamics for the forcing variable, a stationary process can be attained for lower values of of (see
Section 4).6When a constraint is binding, the other parameters are re-estimated accordingly. Typically, if j1 is freely estimated to be larger than 1,
the constrained estimate is given by j1 ¼ 1� � and y freely estimated, with � a given small positive value.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395378
depending on the dynamics of Zt used to solve the model. In contrast, GMM does not impose any constraintof this type on the first-step regression.
In a correctly specified model, both GMM and MLE provide consistent estimators. Thus, two reasons mayexplain the discrepancy between GMM and ML estimators found in many empirical estimates: (1) differencesin the finite-sample properties of the estimators in a correctly specified model; (2) misspecification, resulting ininconsistency of GMM as well as ML estimators. While the present paper primarily focuses onmisspecification, recent work has suggested that the discrepancy found between GMM and ML estimatorscomes from finite-sample bias (Fuhrer and Rudebusch, 2004; Linde, 2005) or from lack of GMMidentification (Mavroeidis, 2005). Therefore, we first discuss and assess finite-sample and weak-instrumentbiases in our set-up.
2.3. Sources of discrepancy in a correctly specified model
There are essentially two sources of bias for the GMM estimator in a correctly specified model. Thefirst source is weak-instrument relevance that occurs when the correlation between instrumentand endogenous regressors is weak. The recent literature emphasizes that weak identification may bepresent even in large samples.7 It has been shown (Bound et al., 1995) that under weak identification the IV(or GMM) estimator is biased toward the Plim of the (inconsistent) OLS estimator. The magnitude of theweak-instrument bias is governed by the concentration parameter, which measures the strength of theinstruments.
The GMM estimator also suffers from finite-sample bias. The bias is in that case also in the direction of theOLS estimator. The magnitude of the bias depends on the sample size, the number of instruments, and themultiple correlation between the instruments and the endogenous regressors (Nelson and Startz, 1990; Buse,1992; Bound et al., 1995). A related issue is instrument redundancy, which occurs when some instruments arenot correlated with the endogenous regressor conditionally on the presence of other instruments. This issuehas been analyzed by Breuch et al. (1999) and Hall et al. (2007).
In the context of RE models, an abundant literature has studied the finite-sample properties of theGMM estimator and shown that this estimator may be severely biased and widely dispersed in small samples(see, among others, Fuhrer et al., 1995; Hansen et al., 1996). The MLE may also suffer from finite-samplebias, but this bias is generally found to be negligible in RE models (see Fuhrer et al., 1995; Jondeauet al., 2004).
In this section, we briefly discuss weak-instrument relevance and investigate the finite-sample bias more indepth. Since both types of biases are known to point to the direction of the Plim of the OLS estimator, webegin with the following proposition, which gives the Plim of the (inconsistent) OLS estimator obtained fromthe regression of Y t onto fY tþ1;Y t�1;Ztg where the expected lead is replaced by the actual lead. It also givesthe expression obtained in our set-up for the concentration parameter, which governs the magnitude of theGMM estimator bias under weak instruments.8
Proposition 1 (Plim of the OLS estimator). Let us assume that the DGP is given by Model 1. The (inconsistent)OLS estimator obtained from (2) has the following Plim:
oOLS ¼1
2
~s2e þ L2ð1� j1Þ
~s2e þ12L2½ð1� j2
1Þ þ ð1� j1rÞ2�
!, ð6Þ
bOLS ¼ bð1þ j1Þ2� j1 � j1r2ð1� j1rÞ
~s2e þ L2ð1� j1rÞ
~s2e þ12L
2½ð1� j21Þ þ ð1� j1rÞ
2�
!, ð7Þ
7See Bound et al. (1995), Staiger and Stock (1997), Stock and Wright (2000), Stock et al. (2002). Staiger and Stock (1997) propose an
asymptotic framework for IV, while Stock and Wright (2000) extend the approach to GMM. Methods robust to weak instruments have
been proposed by Dufour (1997), Stock and Wright (2000), or Kleibergen (2002) and applied to the New Phillips curve by Nason and
Smith (2005) or Dufour et al. (2006).8Staiger and Stock (1997) show that ð1þ l2T=KÞ�1 approximates the magnitude of the finite-sample bias of IV relative to OLS estimator,
where K is the number of instruments, and lT the concentration parameter.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 379
with L ¼ ysu=ð1� j1rÞ. For the instrument set fY t�1;Ztg, the concentration parameter lT is asymptotically
given by
l2TT¼
ð1� j21Þð ~s
2e þ L2Þ
ð1þ j21Þ ~s
2e þ ð1� j1rÞ
2L2.
Proof. See the Appendix.
The expression for the concentration parameter points out that weak identification is likely to occur whenj1 is close to 1, or equivalently of close to 0:5. In this case, which corresponds to a non-stationary dynamicsfor Y t, the Plim of the OLS estimator is always smaller than 0.5. Given that the true parameter of is above 0:5,and that the GMM estimator is biased in the direction of the Plim of the OLS estimator, the GMM estimatorof of is here biased downward. When j1o1, weak identification is asymptotically precluded in ourframework.9 However, even in this case, the finite-sample bias of the GMM estimator points towards the Plimof the OLS estimator. Contemplating (6), we observe that 0poOLSp0:5, so that the GMM estimator of of isstill biased downward.
To investigate the finite-sample bias more closely, we perform Monte-Carlo simulations of DGP (2)–(3).Concerning the GMM approach, we consider two instrument sets. The first one is the optimal instrument set,W t ¼ fY t�1;Ztg, illustrating genuine finite-sample bias. The second set includes L additional (redundant) lagsof W t, illustrating instrument redundancy. It is worth emphasizing that it is a common practice in theempirical literature to include many instruments, in particular several lags. In this over-identified case, thetwo-stage least-square (TSLS) approach yields a consistent estimator, but designing an optimal weightingmatrix requires acknowledging the MA(1) structure of the GMM error term, which results from one-periodahead expectations. We investigate two alternative approaches: (1) the well-known Newey and West (1987)weighting matrix with 12 lags (as typically used in Galı and Gertler, 1999), and (2) the efficient West (1997)matrix that assumes the error term to be an MA(1) process.
Table 1 reports the results of the simulation experiment. First, the ML estimator of of is essentiallyunbiased, with a low dispersion. The estimator of b is unbiased for small values of r, while there is a slightpositive bias when r is large.10 Second, when the optimal instrument set fY t�1;Ztg is chosen (L ¼ 0), theGMM estimator of of is not significantly biased, although with a larger dispersion than that of the MLestimator. The magnitude of the bias increases with the extent of instrument redundancy (as in Hall et al.,2007). When the instrument set includes L ¼ 7 redundant lags, the bias in the GMM estimator of of is clearlynegative. The higher the true value of of , the larger the magnitude of the bias. The median estimate alwayspoints towards the Plim of the OLS estimator, which is below the true value of the parameter, and themagnitude of the bias increases with the value of the true parameter of .
The GMM estimator biases under redundant instruments confirm and rationalize previous simulationevidence reported for instance by Fuhrer and Rudebusch (2004), Linde (2005), or Mavroeidis (2005). It isworth noting, however, that the finite-sample bias in of is not likely to account for the empirical conflictbetween GMM and ML estimates of hybrid models. Indeed most GMM estimates reported in the empiricalliterature point to a large weight on forward-looking expectations relative to lagged terms, suggesting a bias, ifany, towards large values of of . In contrast, in our set-up the finite-sample bias in the GMM estimator istowards the lower bound 0.5.
3. Asymptotic biases in misspecified models
This section investigates the consequences of misspecification on the asymptotic bias of GMM and MLestimators, with a focus on omitted dynamics in the dependent variable. Omitted dynamics has been pointed
9In a model where of and ob are not assumed to sum to one, Mavroeidis (2005) identifies additional sources of under-identification that
are related in particular to the dynamics of the forcing variable.10For r ¼ 0:9, the median estimate of b exceeds 0:1, whatever the true parameter of . This bias is related to the downward bias of OLS in
an autoregressive model. Since b ¼ yof ð1� rÞ, the negative bias in r translates in a positive bias in b.

ARTICLE IN PRESS
Table 1
Finite-sample properties of estimators in the model with a single lag
Structural parameters Statistic GMM ðL ¼ 0Þ GMM ðL ¼ 7Þ GMM ðL ¼ 7Þ ML Plim OLS
(optimal instr.
set)
(NW-12 lags) (West-MA(1))
of r of b of b of b of b of b
0.55 0.0 Median 0.550 0.099 0.523 0.100 0.526 0.102 0.551 0.099 0.492 0.109
MAD 0.049 0.063 0.034 0.063 0.047 0.071 0.014 0.045
0.55 0.9 Median 0.548 0.108 0.534 0.122 0.534 0.124 0.550 0.106 0.459 0.198
MAD 0.022 0.045 0.021 0.052 0.023 0.055 0.002 0.038
0.75 0.0 Median 0.749 0.103 0.690 0.102 0.691 0.106 0.750 0.101 0.498 0.111
MAD 0.074 0.088 0.059 0.084 0.069 0.094 0.043 0.062
0.75 0.9 Median 0.746 0.106 0.699 0.109 0.700 0.111 0.751 0.106 0.488 0.132
MAD 0.054 0.039 0.047 0.041 0.050 0.044 0.020 0.038
0.95 0.0 Median 0.946 0.100 0.852 0.098 0.855 0.101 0.951 0.097 0.500 0.102
MAD 0.106 0.114 0.089 0.105 0.099 0.122 0.072 0.080
0.95 0.9 Median 0.947 0.105 0.855 0.103 0.859 0.107 0.954 0.105 0.499 0.105
MAD 0.088 0.040 0.075 0.040 0.082 0.046 0.049 0.037
This table reports summary statistics on the finite-sample distribution of the GMM and ML estimators of the model with a single lag.
Parameter sets are of ¼ f0:55; 0:75; 0:95g, r ¼ f0; 0:9g, b ¼ 0:1, and se ¼ su ¼ 1. This table reports the median and the median of absolute
deviations from the median (MAD) of the empirical distribution obtained using Monte-Carlo simulations (multiplied by 1.4826 for
comparability with a standard deviation). The experiment is performed as follows. For each parameter set, we simulate 5; 000 samples of
size T ¼ 150. For each simulated sample, a sequence of T þ 100 random innovations are drawn from the Gaussian distribution Nð0;SÞwith no serial correlation ðS ¼ diagðs2e ; s
2uÞÞ, and the first 100 entries are discarded to reduce the effect of initial conditions. It also displays
the Plim of the OLS estimator, towards which the GMM estimator is biased, under weak-instrument relevance or instrument redundancy.
For the first GMM estimator, the instrument set only includes the optimal instruments fY t�1;Ztg. For the second and third GMM
estimators, L ¼ 7 redundant lags of these instruments are also included. The weighting matrix of the second estimator is based on the
Newey and West (1987) procedure (with 12 lags), while the third estimator uses the West (1997) procedure, acknowledging the MA(1)
structure of the error term.
E. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395380
out in several studies as a likely source of misspecification in hybrid RE models (see, e.g., Kozicki and Tinsley,2002; Rudebusch, 2002a, b). Other forms of misspecification are discussed more briefly.
3.1. The case of omitted dynamics
To illustrate omitted dynamics, the DGP is now assumed to include two lags of the dependent variable:Model 2:
Y t ¼ of EtY tþ1 þ o1bY t�1 þ ð1� of � o1
bÞY t�2 þ bZt þ et,
Zt ¼ rZt�1 þ ut, ð8Þ
where the parameters pertaining to lags and lead of inflation sum to one (we define o2b ¼ 1� of � o1
b). Thecharacteristic polynomial of (8) is ð1� of L�1 � o1
bL� o2bL2Þ ¼ 0 with roots j1 ¼ ð1� of Þ=of , j2 ¼ o2
b=of ,and j3 ¼ 1. Consequently, the reduced form of this model is
Y t ¼ j1Y t�1 þ j2Y t�2 þ yZt þ ~et, (9)
where as before y ¼ b=ðof ð1� rÞÞ and ~et ¼ et=of with ~s2e ¼ s2e=o2f . Stationarity conditions of (9) (with an
exogenous stationary forcing variable) are known to be 1� j1 � j240, 1þ j1 � j240, and j24� 1. Theseconditions are equivalent to the following conditions for the structural parameters: ð2� 3of � o1
bÞo0 and�of oo1
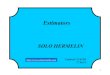
bo1.Fig. 1 displays the area where the reduced form (9) is stationary assuming jrjo1. If we maintain the
assumption that of p1 (or, equivalently, j1X0) to be consistent with the theoretical derivation of the hybrid

ARTICLE IN PRESS
•
•
••
•
•
0 0.5 1 1.5
-1
-0.5
0
0.5
1
�f
�b1
B
D
A
C
F
E
G
H
I
J
� = (1, -1, 1), � = (0, 1)
� = (1, 0, 0), � = (0, 0)
� = (1, 1, -1), � = (0, -1)
� = (1/3, 1, -1/3)� = (2, -1)
� = (1/2, 1/2, 0)� = (1, 0)
� = (2/3, 0, 1/3)� = (1/2, 1/2)
Fig. 1. This figure displays, in the plane fof ;o1bg, the domain of validity of the hybrid model with two lags. The shaded area corresponds
to the domain of stationarity of an AR(2) process. The area ABC corresponds to the additional constraint that of p1. Area DEF
corresponds to the domain where 0pof ;o1b;o
2bp1. The six points in the figure are the pairs fof ;o1
bg selected for Table 2. Last, we denote
o ¼ fof ;o1b;o
2bg and j ¼ fj1;j2g.
E. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 381
model, this yields the triangular area ABC. The segment BC corresponds to the non-stationarity case withj1 þ j2 ¼ 1. The segment AB is associated with of ¼ 1. Along this segment, the degree of persistence j1 þ j2
increases from�1 to 1. The segment CA corresponds to o1b ¼ 1, with a degree of persistence decreasing from 1
to �1.The econometrician is assumed to erroneously select a single-lag specification, so that the estimated
(misspecified) model is a one-lag hybrid model:Model 20:
Y t ¼ af EtY tþ1 þ ð1� af ÞY t�1 þ bZt þ vt,
Zt ¼ rZt�1 þ ut. ð10Þ
Estimators of parameter af are then used as estimators of the structural parameter of : There is nomisspecification in the limiting case where j2 ¼ 0, i.e., o2
b ¼ 0.GMM and ML estimators are built as follows. As regards the selection of the GMM instrument set, we
consider two alternative cases that may be reflective of actual practice. The first estimator (GMM1) is basedon the instrument set fY t�1;Ztg that corresponds to the optimal instrument set in the (misspecified)DGP perceived by the econometrician. The second estimator (GMM2) resorts to the wider instrument setfY t�1;Y t�2;Ztg, including the omitted variable Y t�2. This is the optimal instrument set in the correctlyspecified DGP. In both cases, however, the instruments are not valid for estimating (10) under DGP (8), sincethey are correlated with the error term vt: The ML estimator is obtained by estimating by OLS the reducedform of the postulated Model 20, that is
Y t ¼ fY t�1 þ mZt þ ~vt, (11)
where f ¼ ð1� af Þ=af , m ¼ b=ðaf ð1� cÞÞ, and ~vt ¼ vt=af . Details on the construction of these estimators areprovided in the Appendix. The Plims (or ‘‘pseudo-true values’’) of each estimator are summarized inProposition 2.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395382
Proposition 2 (Plim of estimators with omitted dynamic). Assume that the DGP is given by Model 2 and that the
misspecified Model 20 is estimated. Then, the three estimators have the following Plims:
�
11T
GMM estimator with instrument set fY t�1;Ztg (GMM1):
aGMM1 ¼1
1þ j1 � j2
� �~s2e þ ~L2½1þ j2rð�1þ j1 � j2 þ j2rÞ�
~s2e þ ~L2½1þ j2rðj1 þ j2rÞ�
!,
bGMM1 ¼ bð1þ j1Þð1� j2 � rðj1 þ j2 þ j2rÞÞð1� j1r� j2r2Þð1þ j1 � j2Þ
� �
�
~s2e þ ~L2 1þ j2rðj1 þ j2rÞ2� j1r� j2r
2 þ r1� j2 � rðj1 þ j2 þ j2rÞ
� �~s2e þ ~L2½1þ j2rðj1 þ j2rÞ�
0BB@1CCA.
�
GMM estimator with the instrument set fY t�1;Y t�2;Ztg (GMM2):aGMM2 ¼1� j1 � j1j2
1� j21 � j2
1j2 � j2
� � ~s2e þ ~L2 1þ j2r�1þ j1 � j2 þ j2r
1� j1 � j1j2
� �~s2e þ ~L2 1þ j2r
�2j1j2 þ j2r� j22r
1� j21 � j2
1j2 � j2
� �0BBB@
1CCCA,
bGMM2 ¼ bð1þ j1Þð1� j1 � j2 � rð1� j1 � j1j2Þðj1 þ j2 þ j2rÞÞ
ð1� j1r� j2r2Þð1� j21 � j2
1j2 � j2Þ
� �
�
~s2e þ ~L2 1þ j2rj1ð1þ rÞð1� j1 � j2Þ þ j2rð2þ r� 2j1r� j2rÞ1� j1 � j2 � rð1� j1 � j1j2Þðj1 þ j2 þ j2rÞ
� �~s2e þ ~L2 1þ j2r
�2j1j2 þ j2r� j22r
1� j21 � j2
1j2 � j2
� �0BBB@
1CCCA.
�
ML estimator:aML ¼1� j2
1þ j1 � j2
� � ~s2e þ ~L2 1þ j2r2j1 þ j2rð1� j2Þ
1� j2
� �~s2e þ ~L2½1þ j2rð1þ j1 þ ð1þ rÞj2Þ�
0BB@1CCA,
bML ¼ bð1þ j1Þð1� j2 � rj1Þ
ð1� j1r� j2r2Þð1þ j1 � j2Þ
� � ~s2e þ ~L2 1þ j2r2j1 � j2
1rþ j2r� j1j2r2 � r
1� j2 � rj1
� �~s2e þ ~L2½1þ j2rð1þ j1 þ ð1þ rÞj2Þ�
0BB@1CCA,
with ~L ¼ ysu=ð1� j1r� j2r2Þ.
Proof. See the Appendix.
Parameter ~L is directly related to the covariance between Y t and Zt, since ~L2 ¼ ð1� r2ÞE½ZtY t�2=V ½Zt�.
When j2 ¼ 0, all estimators are asymptotically unbiased, with aGMM1 ¼ aGMM2 ¼ aML ¼ 1=ð1þ j1Þ ¼ of .Restricting to the case of an iid forcing variable (r ¼ 0), we then obtain the following corollary.11
he same results arise when ~s2e is large relative to ~L2.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 383
Corollary 1. In the case r ¼ 0, Plims of estimators of af and b are given by
aGMM1 ¼1
1þ j1 � j2
; bGMM1 ¼ bð1þ j1Þð1� j2Þ
1þ j1 � j2
� �,
aGMM2 ¼1� j1 � j1j2
1� j21 � j2
1j2 � j2
; bGMM2 ¼ bð1þ j1Þð1� j1 � j2Þ
1� j21 � j2
1j2 � j2
� �,
aML ¼1� j2
1þ j1 � j2
; bML ¼ bð1þ j1Þð1� j2Þ
1þ j1 � j2
� �.
Under stationarity ð�1oj1 þ j2o1Þ, the following inequalities hold:
1=2paMLpof paGMM1paGMM2pþ1 if j2X0 ðarea GÞ;
1=3paGMM1paGMM2pof paMLp1 if j2p0 and j1p1 ðarea HÞ;
1=4paGMM1pof paGMM2paMLp2=3 if j2 2 ½�1; j� and j1X1 ðarea IÞ;
1=4paGMM1pof paMLpaGMM2p1=2 if j2 2 ½j; 0� and j1X1 ðarea JÞ;
and
0pbGMM2pbGMM1 ¼ bMLpb if j2X0;
bGMM2pbpbGMM1 ¼ bML if j2p0;
where j ¼ ð1� j21Þ=ð1þ j2
1 � j1Þ is negative when j1X1.
We interpret the discrepancy of estimators obtained above as follows, assuming j240. As regards theGMM2 estimator, a crucial feature is that a relevant forcing variable is omitted from the estimated equationbut included in the instrument set. As a result, the latter estimator suffers from an upward bias because Y tþ1
partly captures the (positive) effect of the omitted variable Y t�2. Concerning the GMM1 estimator, theomitted variable is not included in the instrument set. But given the persistence in the dependent variable, thefirst-step regression implies that bY tþ1 still captures a part of the omitted variable Y t�2. Therefore, the bias inthe GMM1 estimator of af is still positive. On the contrary, the variable Y t�2 is not included in the reduced-form equation (11) estimated for the ML estimator. As a consequence, Y t�1 partly captures the effect of Y t�2.This creates a downward bias in the ML estimator of the forward-looking parameter, through the positivecorrelation of Y t�2 with Y t�1.
The two largest areas (G and H) arguably reflect two well-known applications in the context of the NewKeynesian macroeconomics.12 In the New Keynesian Phillips curve, the additional lags are likely to have apositive cumulative effect so that reduced-form parameters are such that j1o1 and j240 (as in area G). Inthis context, the ML estimator of af is expected to have a downward bias, while the GMM estimator isexpected to have an upward bias. In contrast, in the hybrid Euler equation for output gap, j1o1 and j2o0(as in area H) are typically obtained as reduced-form parameters (e.g., Rudebusch, 2002a, b). In that case, theGMM and ML estimators point now in the opposite direction with respect to the true parameter(aGMMpof paML). Section 4 provides simulation evidence suggesting that the biases in the GMM and MLestimators of these two equations are actually in line with the analytical results.
Setting r ¼ 0 may appear as an overly strong assumption, as compared with the serial correlation typicallyobtained for the forcing variable in many RE models. It is possible to show that the rank of the Plims of MLand GMM estimators is unaltered for most parameter sets. Although a formal proof of this result is notavailable, we checked it by computing the Plim of the various estimators using a grid for the structuralparameters (using the expressions given in Proposition 2). For all values of r, as soon as of X0:5, the rankingof GMM and ML estimators is aMLpaGMM1paGMM2 when j2X0, and aGMM1paGMM2paML when j2p0.13
Notice that, as confirmed by Fig. 1, the case of X0:5 is the only case where we can consider small departurefrom the null hypothesis o2
b ¼ 0 (corresponding to the segment DF). Indeed for of o0:5, Y t remainsstationary only for strictly negative values of o2
b.
12Areas G–J are depicted in Fig. 1.13When of o0:5, the ranking depends on the analogous to parameter j, which in general depends on r in a very non-linear way.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395384
3.2. Other sources of misspecification
Although the results presented in the previous section are specific to the DGP studied above, qualitativelysimilar results are obtained with other sources of misspecification. As an illustration, consider the case when aregressor is omitted in the hybrid equation. Such a case has been studied by Rudd and Whelan (2005) forthe IV estimator in a backward-looking DGP. To generalize their framework, we consider the followinghybrid DGP:
Y t ¼ of EtY tþ1 þ ð1� of ÞY t�1 þ b1Z1;t þ b2Z2;t þ et, ð12Þ
Z1;t ¼ r1Z1;t�1 þ u1;t, ð13Þ
Z2;t ¼ r2Z2;t�1 þ u2;t, ð14Þ
with Eðu1;tu2;tÞ ¼ 0; so that the two forcing variables are uncorrelated. The misspecified equation estimated bythe econometrician is
Y t ¼ af EtY tþ1 þ ð1� af ÞY t�1 þ bZ1;t þ et. (15)
As shown in the Appendix, when 0pr1;r2p1, the following inequalities hold:
aGMM1pof ,
aMLpof paGMM2,
where aGMM1 and aGMM2 are the Plims of the GMM estimators with instrument sets fY t�1;Z1;tg andfY t�1;Z1;t;Z2;tg, respectively. As shown in a preliminary version of this paper, other misspecifications such asmeasurement error in the forcing variable would produce the same result that the GMM2 and the MLestimators are biased in opposite direction with respect to of .
14
In all these cases, a similar intuition applies: in the second-stage regression of the GMM2 estimation, thefitted lead of the dependent variable captures the effect of the omitted variable, so that parameter of is over-estimated. On the opposite, with MLE, the effect of the omitted variable is captured by the lag of thedependent variable, resulting in parameter of being under-estimated. Notice that in the omitted variable andmeasurement error cases, the GMM1 estimator of af always under-estimates of . The reason is that theinstrument set used in the first-step regression does not provide any useful information on the omitted variablethat may be captured by the fitted lead of the dependent variable. By contrast, in the omitted dynamics case,the dependent variable, Y t�1, does contain valuable information on the omitted lag Y t�2.
3.3. A quasi-Hausman test for misspecification
The result that ML and GMM estimators generally diverge in opposite directions under misspecificationsuggests a Hausman-type test. The original Hausman (1978) specification test is based on the differencebetween an estimator consistent under the null and alternative hypotheses and an estimator efficient under thenull hypothesis. In our context, under the null, the ML estimator is efficient while the GMM estimator isconsistent. However, under the alternative of misspecification of the equation of interest, none of theestimators is consistent. We label this test a quasi-Hausman test.15 As established in the previous sections, thePlims of the respective estimators differ under the alternative, so that the quasi-Hausman test is consistent forthe types of misspecification considered here. It is likely that the test also has power against othermisspecifications.
We define dML and dGMM the estimators of d ¼ ðof ;bÞ0 and VML and VGMM their respective covariance
matrices, estimated by VML and VGMM. Under the null that the DGP is correctly specified and assumingnormality of errors, the estimator dML is efficient. Then Hausman (1978)’s lemma applies.
14The role of measurement error in the new Phillips curve estimates is discussed by Linde (2005).15This terminology comes from Verbeek and Nijman (1992). Quasi-Hausman tests with the same feature have been proposed in other
contexts, e.g., by White (1982) and Hahn and Hausman (2002).

ARTIC
LEIN
PRES
S
Table 2
Plim of estimators and misspecification test in the case of omitted dynamics
Structural parameters Panel A: plim of the estimator Panel B: power of misspecification tests
GMM1 GMM2 Optimal GMM2 ML With GMM2
(NW)
With GMM2
(W)
of o1b o2
bj1 þ j2 r af b af b af b af b Hausman J-stat Hausman J-stat
0.40 0.90 �0.30 0.75 0.00 0.308 0.135 0.526 0.053 0.530 0.048 0.538 0.135 0.446 1.000 0.178 1.000
0.40 0.90 �0.30 0.75 0.90 0.410 0.348 0.511 0.193 0.504 0.155 0.577 0.190 0.887 1.000 0.334 0.539
0.60 0.25 0.15 0.92 0.00 0.706 0.088 0.857 0.071 0.666 0.087 0.529 0.088 0.240 0.543 0.053 0.488
0.60 0.25 0.15 0.92 0.90 0.546 0.064 0.561 0.042 0.535 0.068 0.519 0.072 0.313 0.771 0.335 0.687
0.60 0.60 �0.20 0.34 0.00 0.500 0.111 0.536 0.107 0.523 0.118 0.667 0.111 0.878 0.896 0.869 0.889
0.60 0.60 �0.20 0.34 0.90 0.575 0.149 0.601 0.145 0.585 0.165 0.725 0.119 0.890 0.976 0.868 0.977
0.80 �0.10 0.30 0.62 0.00 1.143 0.089 1.217 0.087 0.961 0.090 0.714 0.089 0.478 0.877 0.199 0.855
0.80 �0.10 0.30 0.62 0.90 0.769 0.037 0.804 0.027 0.683 0.056 0.609 0.068 0.370 0.982 0.298 0.897
0.80 0.30 �0.10 0.12 0.00 0.727 0.102 0.730 0.102 0.676 0.103 0.818 0.102 0.387 0.245 0.345 0.207
0.80 0.30 �0.10 0.12 0.90 0.768 0.114 0.771 0.114 0.728 0.123 0.856 0.104 0.504 0.379 0.374 0.305
Bounds
1.00 1.00 �1.00 �1.00 0.00 0.50 0.50 1.00 1.00
1.00 1.00 �1.00 �1.00 1.00 0.50 0.50 1.00 1.00
1.00 �1.00 1.00 1.00 0.00 Infinite Infinite 1.00 1.00
1.00 �1.00 1.00 1.00 1.00 0.50 Infinite 0.50 0.50
0.33 1.00 �0.33 1.00 0.00 0.25 0.50 0.50 0.50
0.33 1.00 �0.33 1.00 1.00 0.25 0.50 0.50 0.50
This table reports the Plim of GMM and ML estimators (Panel A) and the power of misspecification tests (Panel B) in the case of omitted dynamics. Selected pairs of fof ;o1bg are
displayed in Fig. 1. Other parameter sets are r ¼ f0; 0:9g, b ¼ 0:1 and se ¼ su ¼ 1. The Plims are computed using Proposition 2. Bounds for the Plims of estimators of af and b are
obtained for fof ;o1bg ¼ fA;B;Cg where A, B, and C are defined in Fig. 1, r ¼ f0; 1g, and se ¼ 0.
E.
Jo
nd
eau
,H
.L
eB
iha
n/
Jo
urn
al
of
Eco
no
metrics
14
3(
20
08
)3
75
–3
95
385

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395386
Proposition 3. Under the null hypothesis of no misspecification, the statistic ðdGMM � dMLÞ0V�1ðdGMM � dMLÞ is
asymptotically distributed as a w2 with k degrees of freedom, where k is the dimension of d and where
V ¼ VGMM � VML.
In this proposition, the covariance matrix V is supposed to be positive definite. In some cases, it may besingular. Hausman and Taylor (1981) show that the same result applies provided one uses a generalizedinverse of V in the estimation of the statistics.16
An additional feature is that in the case of misspecification affecting the ML auxiliary model (Eq. (3)), theGMM estimator is consistent under the alternative while the ML estimator is not. Rejection of the nullhypothesis can be interpreted as a misspecification of either the equation of interest or the ML auxiliaryequation.
3.4. Numerical evidence
To assess the quantitative importance of the estimator biases under misspecification, we present in Table 2the Plims of GMM and ML estimators using formulae reported in Proposition 2. We select several pairs forfof ;o1
bg, corresponding to areas of interest in Fig. 1 (the selected points are displayed in the figure). The valuescorrespond to a wide range of persistence ðj1 þ j2Þ of the dependent variable. We also consider r ¼ f0; 0:9g,b ¼ 0:1 and se ¼ su ¼ 1. (Results for other values are similar.) The values for ob2 are chosen to be rathersmall, in order to cover moderate departures from model (2)–(3).
To obtain analytical results, Proposition 2 has abstracted from the issue of selecting the optimal weightingmatrix. This is innocuous in the just-identified case (GMM1). However, in the over-identified case (GMM2),as put forward by Hall and Inoue (2003), different weighting matrices may yield different asymptotic biasesunder misspecification. In addition to the TSLS approach adopted in the previous sections, we thus alsoconsider an estimation based on the efficient weighting matrix proposed by West (1997). In that case, the Plimsare computed using a large-sample simulation.
Table 2 (Panel A) indicates that very large biases are likely to occur. Two important parameters affect thesize of the bias, namely the size and the sign of the omitted lag (o2
b) and the persistence of the forcing variable(r). For all values of r, a negative parameter o2
b tends to induce a negative bias in GMM estimators, but apositive bias in the ML estimator. In addition, the magnitude of this bias increases with of for GMM, while itdecreases with of for MLE. With positive o2
b, in the case of no persistence (r ¼ 0), the ML bias is relativelysmall, while GMM estimators have a severe upward bias. For instance, when of ¼ 0:8 and o1
b ¼ �0:1(o2
b ¼ 0:3), the pseudo-true values are aGMM1 ¼ 1:1, aGMM2 ¼ 1:2, and aML ¼ 0:7. Even the optimal GMMestimator yields an estimate of aGMM2 ¼ 1. In the high persistence case (r ¼ 0:9), the magnitude of the biasstrongly reduces for GMM estimators and the bias turns out to be negative. On the contrary, the ML biasremains negative and increases in absolute value. It is worth emphasizing that in all cases considered theranking of the GMM and ML estimators is not affected by introducing persistence in the forcing variable orvarying the GMM weighting matrix (though the sign of the bias in af with respect to of may be affected).
We turn now to the performances of the proposed quasi-Hausman test statistic relative to the widely usedHansen’s (1982) J-statistic for misspecification (Panel B). We use a Monte-Carlo experiment with T ¼ 150, atypical sample size with macroeconomic data. As before, we consider the GMM weighting matrices proposedby Newey and West (1987) and West (1997). Under the null hypothesis, the two test procedures perform ratherwell, their relative performance mainly depending on the weighting matrix used for the GMM estimation.17
The table reports the power of the test statistics when the model (2)–(3) is actually misspecified, i.e., thepercentage of the 5; 000 replications in which the test statistic exceeds the relevant critical value of the w2
16In finite samples, it is also possible that some elements on the diagonal of V are estimated to be negative, because some parameters are
more precisely estimated by GMM than by ML. In such instances, the Hausman test should not be interpreted, since we cannot conclude
on the significance of the difference in point estimates.17Unreported evidence shows that the tests based on the West (1997) weighting matrix are broadly correctly sized: for a nominal size of
5%, the actual rejection rate is typically between 3% and 10% for the J test and between 4% and 13% for the quasi-Hausman test. Tests
based on the Newey andWest (1987) weighting matrix provide higher rejection rates: between 5% and 14% for the J test and between 10%
and 25% for the quasi-Hausman test. Detailed results are available upon request from the authors.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 387
distribution for a nominal size of 5%. The two statistics display similar overall performances, and theirrelative performance depends on the parameter set. For some sets of parameters (typically, for o2
bo0), the twostatistics display a large power, suggesting that the statistics are able to discriminate these cases quite easily. Inthe case where o2
b is positive, the two statistics have rather low power, the quasi-Hausman test performing theworst. The reason for the relative poor performance of the quasi-Hausman test lies in this case in the finite-sample bias already noticed. Indeed, for o2
b40, the GMM estimator is asymptotically biased upwards, but thefinite-sample bias partially compensates this first effect, therefore reducing the gap between the two estimators.
4. A multivariate New Keynesian model
In the previous sections, we adopted a stylized model to provide analytical results under misspecification. Inempirical work, however, the forcing variable is not likely to be strongly exogenous and may itself have ahybrid dynamics. Typical illustrations of such a multivariate hybrid model can be found in the New Keynesianmacroeconomics (see Christiano et al., 2005). The general formulation of the multivariate hybrid RE modelcan be written in compact form as follows:
G1Yt ¼ G2EtYtþ1 þ G0Yt�1 þ gt, (16)
where Yt is the vector of dependent variables and gt the vector of shocks, while G0, G1 and G2 are matrices thatdepend on structural parameters, denoted x. Shocks gt are assumed to be serially uncorrelated, but they maybe cross-correlated, so that their covariance matrix S is not necessarily diagonal. This model mayaccommodate dynamics including several lags or leads, provided Yt is redefined accordingly. Using theundetermined coefficient approach, the structural form (16) has the following solution:
Yt ¼ B1Yt�1 þ B0gt, (17)
with B1 ¼ ðG1 � G2B1Þ�1G0 and B0 ¼ ðG1 � G2B1Þ
�1. Numerical procedures have been developed to computethe reduced form (17) of the model, such as the approach developed by Anderson and Moore (1985).18 Oncethe reduced form is obtained, the ML estimator maximizes the concentrated log-likelihood function of thesample
lnLðxÞ ¼ �T ½1þ lnð2pÞ� �T
2ln jSj þ
T
2ln jB
�1
0 j2,
where S ¼ T�1PT
t¼1 gtðxÞgtðxÞ0 is the estimated covariance matrix of residuals. Since no analytic solution can
be obtained in this model, our analysis of the asymptotic bias is based on Monte-Carlo simulations.
4.1. The model
We focus on an empirical New Keynesian model inspired by Rudebusch (2002a, b) that is well suited toinvestigate explicitly the case of omitted dynamics.19 This model combines a Phillips curve, an aggregatedemand equation and a Taylor-rule type reaction function. It can be viewed as a multivariate extension of themodel studied in the previous sections.
Model 3:
pt ¼ opEtptþ1 þ ð1� opÞX4j¼1
ojpbpt�j þ byyt þ ep;t, ð18Þ
yt ¼ oyEtytþ1 þ ð1� oyÞX2k¼1
okybyt�k þ brðit � Etptþ1Þ þ ey;t, ð19Þ
it ¼ rit�1 þ ð1� rÞðdppt þ dyytÞ þ ei;t, ð20Þ
18An alternative estimation procedure has been recently put forward by Kurmann (2007) in a closely related context, following the
approach originally developed by Sargent (1979).19The reader may also refer to Kozicki and Tinsley (2002) for a review of interpretations of the hybrid Phillips curve with additional lags
or to Fuhrer and Rudebusch (2004) for the hybrid aggregate demand equation with additional lags.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395388
where pt is the inflation rate, yt the output gap and it the short-term nominal rate. ep;t, ey;t, and ei;t denote errorterms. We therefore define Yt ¼ ðpt; yt; itÞ
0 and gt ¼ ðep;t; ey;t; ei;tÞ0.
The dynamics of inflation (18) is a hybrid Phillips curve with several own lags and the output gap as forcingvariable. We impose the constraint
P4j¼1 o
jpb ¼ 1 to be consistent with the natural rate hypothesis. Similarly,
the aggregate demand equation for output gap (19) includes several own lags and the short-term nominalinterest rate as forcing variable, with
P2k¼1 o
kybp1. Finally, (20) is a Taylor rule with interest-rate smoothing.
It should be mentioned that this model includes the output gap as forcing variable in the Phillips curve, inplace of the more theoretically grounded marginal cost, suggested by Galı and Gertler (1999). We adopt thisspecification because it provides a convenient multivariate representation for investigating the biases in theGMM and ML estimators. Another advantage of this model is that we can use the parameter estimatesreported by Rudebusch (2002a, b) to calibrate our Monte-Carlo experiment. A multivariate model involvingthe marginal cost as forcing variable would raise be more problematic to calibrate, since no simple well-established model for the joint dynamics of inflation and marginal cost has been proposed to our knowledge.
Now, we explore the asymptotic bias of GMM and MLE in a misspecified model, in which only one lag isintroduced in the dynamics of inflation and output gap. The assumed misspecified model is thus designed bysetting o1
pb ¼ o1yb ¼ 1 and o2
pb ¼ o3pb ¼ o4
pb ¼ o2yb ¼ 0 in Model 3:
Model 30:
pt ¼ apEtptþ1 þ ð1� apÞpt�1 þ byyt þ vp;t, ð21Þ
yt ¼ ayEtytþ1 þ ð1� ayÞyt�1 þ brðit � Etptþ1Þ þ vy;t, ð22Þ
it ¼ rit�1 þ ð1� rÞðdppt þ dyytÞ þ vi;t. ð23Þ
4.2. Simulation results
The design of the Monte-Carlo simulation experiment relies on the model estimated by Rudebusch(2002a, b). For all parameters but op and oy, we use the parameters reported by Rudebusch: o1
pb ¼ 0:67,o2
pb ¼ �0:14, o3pb ¼ 0:4, o4
pb ¼ 1� o1pb � o2
pb � o3pb ¼ 0:07, by ¼ 0:13, o1
yb ¼ 1:15, o2yb ¼ �0:27, br ¼ �0:09,
r ¼ 0:73, dp ¼ 1:53, dy ¼ 0:93, and the standard deviations of innovations are sep ¼ 1:01, sey ¼ 0:83, andsei ¼ 0:36. Then, we investigate several parameter sets for fop;oyg from 0:25 to 0:75.
Concerning the MLE, Model 30 is estimated simultaneously, using the procedure described above. Asregards GMM, the estimator follows the standards of the empirical literature and thus departs from the TSLSversion used in previous section. Given the multivariate nature of the model and consistently with mostprevious work, valid instruments are assumed to be dated t� 1 or earlier. The Phillips curve and the aggregatedemand equation are estimated jointly in order to capture the possible correlation between momentconditions. The instrument set contains fYt�1; . . . ;Yt�4g, in accordance with the number of lags in the reducedform of the correctly specified model (18)–(20).20 The weighting matrix is computed using the West (1997)procedure. (Using the Newey–West weighting matrix yields similar results.)
In Table 3, we present two types of results. First, we report the Plim of the GMM and ML estimators,computed using a large sample of 100; 000 observations. Second, we report the median and the MAD of thefinite-sample distribution of the estimators, based on 5; 000 samples of 150 observations. As regards GMMestimation, we obtain very large asymptotic biases when the forward-looking component in the Phillips curveis small to moderate. Whatever the value of the true parameter op (from 0:25 to 0:75), the Plim of the GMMestimate ranges between 0:7 and 0:87. Even worse, unreported estimates indicate that, even when op ¼ 0:05(with oy ¼ 0:5), the Plim of the GMM estimate is still as high as 0:63. Thus GMM is not able to discriminatebetween a Phillips curves with a dominant backward-looking component and one with a dominant forward-looking component. In addition, in most cases, the output-gap parameter (by) is found to be negative althoughthe true parameter is positive. The aggregate demand equation is much less prone to an asymptotic bias in theforward-looking parameter (ay). The forward-looking component is not strongly affected, except in the case of
20We also investigated a GMM1-type estimator in which the lags of inflation and output gap beyond pt�1 and yt�1 were excluded from
the instrument set. The results were not significantly altered, so that they are not reported to save space.

ARTICLE IN PRESS
Table 3
Asymptotic and finite-sample properties of estimators in the hybrid multivariate model with omitted dynamics
Structural parameters Statistic GMM ML Power of misspecification tests
op oy ap by ay br ap by ay br Hausman J-stat
0.50 0.50 Plim 0.751 �0.029 0.568 �0.069 0.543 �0.008 0.577 �0.052 0.745 0.972
Median 0.690 0.001 0.559 �0.055 0.575 0.042 0.614 �0.044
MAD 0.048 0.041 0.026 0.028 0.030 0.021 0.023 0.013
0.25 0.25 Plim 0.701 �0.008 0.484 �0.022 0.529 �0.002 0.328 �0.111 0.923 0.999
Median 0.646 �0.002 0.490 �0.019 0.536 �0.003 0.293 �0.171
MAD 0.042 0.017 0.021 0.018 0.035 0.011 0.188 0.120
0.75 0.75 Plim 0.869 �0.105 0.771 �0.085 0.764 0.068 0.786 �0.072 0.591 0.626
Median 0.790 0.002 0.732 �0.076 0.768 0.081 0.791 �0.077
MAD 0.057 0.107 0.038 0.033 0.043 0.052 0.036 0.020
0.25 0.75 Plim 0.747 �0.025 0.773 �0.057 0.618 �0.046 0.757 �0.063 0.872 0.928
Median 0.667 �0.007 0.737 �0.055 0.606 �0.031 0.778 �0.063
MAD 0.050 0.027 0.038 0.027 0.048 0.040 0.029 0.010
0.75 0.25 Plim 0.784 0.097 0.392 �0.096 0.745 0.091 0.397 �0.084 0.707 0.976
Median 0.735 0.084 0.452 �0.053 0.742 0.092 0.391 �0.092
MAD 0.041 0.028 0.042 0.035 0.043 0.018 0.092 0.049
This table reports estimates of the multivariate hybrid model, described in Eqs. (21)–(23), when it is estimated with a single lag.
Parameters are those reported by Rudebusch (2002a, b): o1pb ¼ 0:67, o2
pb ¼ �0:14, o3pb ¼ 0:4, o4
pb ¼ 1� o1pb � o2
pb �o3pb ¼ 0:07,
by ¼ 0:13, o1yb ¼ 1:15, o2
yb ¼ �0:27, br ¼ �0:09, r ¼ 0:73, dp ¼ 1:53, dy ¼ 0:93, sep ¼ 1:01, sey ¼ 0:83, and sei ¼ 0:36. As in Rudebusch,
we consider several values for op and oy. The Plims of ap, by, ay and br are computed with a sample of 100; 000 observations. Median and
MAD correspond to the finite-sample distribution of ap, by, ay and br. They are obtained using Monte-Carlo simulation of 5; 000 samples
of size T ¼ 150. Hausman and J-stat denote the power of the quasi-Hausman test and J test, respectively, i.e., the percentage of the 5; 000replications in which the test statistic exceeds the relevant critical value of the w2 distribution for a nominal size of 5%. The GMM
estimation is performed using the West (1997) procedure for the weighting matrix (MA(1) error term). Eqs. (21)–(22) are jointly estimated.
The instrument set contains four lags of the inflation rate, the output gap and the short-term interest rate. The ML estimates result from
the joint estimation of Eqs. (21)–(23).
E. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 389
a very small value of the true parameter oy ¼ 0:25. In this case, the bias may be as high as 0.2, depending onthe persistence in the Phillips curve.
Turning to the MLE, the forward-looking component of the Phillips curve is much less biased than the oneobtained with GMM, so that the same ranking of Plims estimators as in Section 3 appears. Significant MLEbiases are found for op ¼ 0:25 only. When op is equal to 0:5 or 0:75, the consequences of misspecification onap and ay are modest, while estimates of by and br are correctly signed. Also, the finite-sample distribution ofthe ML estimator has a median very close to its Plim.
A noticeable feature of this experiment is that the discrepancies between GMM and ML estimators are closeto those obtained on historical data.21 For instance, the medians of the finite-sample distribution of thePhillips curve parameters reported in the table for fop;oyg ¼ f0:5; 0:5g or f0:25; 0:25g are close to the estimatesreported by Jondeau and Le Bihan (2005) or Nason and Smith (2005). Indeed, the former obtain ap ¼ 0:61and by ¼ �0:025 with GMM and ap ¼ 0:48 and by ¼ 0:017 with ML, while the latter report ap ¼ 0:68 andby ¼ 0:008 with GMM and ap ¼ 0:51 and by ¼ �0:001 with ML.
Finally, the table provides some evidence on the power of the quasi-Hausman and J statistics in the case ofnon-local misspecification. We observe that in all cases the two statistics perform rather well, since they areable to detect the assumed misspecification in at least 60% of the cases. In general, the J statistic has somewhat
21We have checked that in a correctly specified model (with op ¼ oy ¼ 0:5), GMM and MLE are not likely to yield discrepancies
between estimates of the forward-looking parameters as large as the ones obtained in a misspecified set-up. Typically, the probability of
obtaining a gap of 0.12 (as reported in Table 3 for op ¼ oy ¼ 0:5) is only 0.4%.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395390
more power than the quasi-Hausman statistic. The table suggests that one reason for the lower power of thequasi-Hausman test is that the finite-sample bias on ap systematically reduces, and sometimes offsets, theasymptotic bias. We observe the opposite for ay, since the finite-sample bias exacerbates the asymptotic bias,but this effect is less sizeable than that of ap. The quasi-Hausman test might have a better relative power undermore local misspecifications or when restricting to a subset of parameters.
5. Conclusion
In this paper, we analyze the asymptotic biases in the GMM and ML estimators in misspecified second-order RE models. In the case of omitted dynamics, we show analytically that the GMM and ML biasesgenerally point to opposite directions. The same contrast between the two estimators emerges whenconsidering other plausible misspecifications or when a more elaborate multivariate model is considered.
Results in the present paper point to a critical source of discrepancy between estimators of a RE model,i.e., when a relevant regressor is omitted from the estimated equation but included in the GMM instrumentset. Such an instance, rather likely when a large number of instruments is used, causes the leadof the dependent variable to capture the effect of the omitted variable, and the degree of forward-lookingnessto be over-estimated. In the set-up analyzed here, misspecification of the equation of interest is typicallyfound to be more harmful to the GMM estimator than to the MLE. This finding to some extent balances thewell-known fact that in RE models, MLE may, unlike GMM, suffer from misspecification of the auxiliarymodel.
We also show through Monte-Carlo simulation of a multivariate New Keynesian model that GMM is morewidely biased than MLE in a way that is likely to fill the gap between empirical estimates. Our results help torationalize the empirical discrepancy reported between the large degree of forward-lookingness typically foundwhen implementing GMM and the low degree of forward-lookingness obtained by MLE. Misspecification(and, in particular, omitted dynamics) typically induces biases in GMM and MLE that are consistent with thesign and the magnitude of parameter estimates reported in the empirical literature.
Acknowledgments
An earlier version of this paper has been presented at the Econometric Society European Meeting in August2003 (Stockholm), at the North American Summer Meeting of the Econometric Society in June 2004 (Providence),and at seminars hold at the Banque de France, the ECB, the Universite Paris 12 Val de Marne, GREQAM(Universite de la Mediterranee), CORE (Catholic University of Louvain), and Oxford University. The authors aregrateful to A. Zellner, an associate editor and three referees for very helpful comments. We also thank R.Davidson, P. Feve, A.M. Fuertes, C. Hurlin, A. Kurmann, F. Legendre, J. Matheron, S. Mavroeidis, and P.Sevestre for comments and discussions. This paper does not necessarily reflect the views of the Banque de France.
Appendix A
A.1. Model with a single lag
This section reports moments and cross-moments implied by Model 1. These expressions are used tocompute the moment conditions involved in the definition of estimators.
A.1.1. Moments and cross-moments
Moments of Zt are known to be E½Z2t � � s2Z ¼ s2u=ð1� r2Þ, and E½ZtZt�i� ¼ ris2Z. Cross-moments with Y t are
E½ZtY t� ¼ys2Z
1� j1r¼ G0; E½ZtY t�1� ¼ rG0 and E½Y tZt�1� ¼ j1G0 þ yrs2Z.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 391
Moments involving Y t only are
E½Y 2t � ¼
~s2e1� j2
1
þ1þ j1r1� j2
1
yG0 ¼ F0,
E½Y tY t�1� ¼ j1F0 þ yrG0,
E½Y tY t�2� ¼ j21F0 þ yrðj1 þ rÞG0.
A.1.2. Proof of Proposition 1
Since (2) can be equivalently written as
Y t � Y t�1 ¼ of ðEtY tþ1 � Y t�1Þ þ bZt þ et, (24)
the Plim of the OLS estimators of (2) is obtained by solving the following expressions:
E½ðY tþ1 � Y t�1Þ � ððY t � Y t�1Þ � of ðY tþ1 � Y t�1Þ � bZtÞ� ¼ 0,
E½Zt � ððY t � Y t�1Þ � of ðY tþ1 � Y t�1Þ � bZtÞ� ¼ 0
yielding (6) and (7) in the text.Rewriting (2) as in (24), we observe that the endogenous regressor is ðY tþ1 � Y t�1Þ. Iterating (2) backward,
we obtain the expression of the endogenous regressor as a function of the optimal instrument set (first-stageregression of the TSLS estimation)
Y tþ1 � Y t�1 ¼ ðj21 � 1ÞY t�1 þ y1ðj1 þ rÞZt þ ~etþ1 þ j1~et þ yut,
where the variance of the error term vt ¼ ~etþ1 þ j1~et þ yut is
s2v ¼ ð1þ j21Þ ~s
2e þ y2s2u.
Since there is one endogenous and one exogenous regressor in the equation, the concentration ratio is a scalar.Using the definition in Staiger and Stock (1997), it is then here given by
l2TT¼
Oð1� j21Þ
2
s2v,
where O ¼ E½Y 2t�1� � E½ZtY t�1�
2=E½Z2t �. Using the expressions above, we obtain
l2TT¼
ð1� j21Þð ~s
2e þ L2Þ
ð1þ j21Þ ~s
2e þ ð1� j1rÞ
2L2.
A.2. Model with omitted dynamics
This section reports moments and cross-moments implied by Model 2 and describes how the Plims of thevarious estimators are computed.
A.2.1. Moments and cross-moments
Cross-moments between Zt and Y t are now given by
E½ZtY t� ¼ys2Z
1� j1r� j2r2¼ ~G0,
E½ZtY t�i� ¼ ri ~G0; for all i40,
E½Y tZt�1� ¼ ðj1 þ j2rÞ ~G0 þ yrs2Z.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395392
Moments involving Y t only are
E½Y 2t � ¼ð1� j2Þ ~s
2e þ ½j1rð1þ j2Þ þ ð1� j2Þð1þ j2r
2Þ�y ~G0
ð1þ j2Þð1� j1 � j2Þð1þ j1 � j2Þ¼ ~F0,
E½Y tY t�1� ¼j1
1� j2
~F0 þyr
1� j2
~G0,
E½Y tY t�2� ¼ j2 þj21
1� j2
� �~F0 þ
j1
1� j2
þ r� �
yr ~G0.
A.2.2. Proof of Proposition 2
Plim of GMM1: Estimator GMM1 relies on the following moment conditions:
E½Y t�1 � ðY t � af Y tþ1 � ð1� af ÞY t�1 � bZtÞ� ¼ 0, ð25Þ
E½Zt � ðY t � af Y tþ1 � ð1� af ÞY t�1 � bZtÞ� ¼ 0. ð26Þ
Since the model is just identified, the Plims of the estimators of af and b reported in Proposition 2 are obtainedby solving the two moment conditions directly.
Plim of GMM2: Estimator GMM2 includes fY t�1;Y t�2;Ztg with the omitted variable in the instrument set,leading to an over-identified parameter set. The estimator is built as a two-step estimator. First, Y tþ1 isregressed on the instrument set to build the expectation of Y tþ1 conditional on the information set, yieldingY tþ1 ¼ ðj2
1 þ j2ÞY t�1 þ j1j2Y t�2 þ yðj1 þ rÞZt. Then, the Plims of estimators of af and b are obtained bysolving the two following moment conditions:
E½ðY tþ1 � Y t�1Þ � ðY t � af Y tþ1 � ð1� af ÞY t�1 � bZtÞ� ¼ 0, ð27Þ
E½Zt � ðY t � af Y tþ1 � ð1� af ÞY t�1 � bZtÞ� ¼ 0. ð28Þ
Plim of ML: TheML estimator is obtained by estimating the reduced form of the postulatedModel 20, that is (11).Parameters f, m, and r are estimated by OLS, and their Plims are denoted fML, mML, and rML. Then, the Plims ofthe ML estimators of af and b are given by the conditions aML ¼ 1=ð1þ fMLÞ and bML ¼ mMLaMLð1� rMLÞ.
A.3. Model with omitted variable
This section describes how the Plims of the various estimators are computed when the DGP is given by(12)–(14), while the (misspecified) equation estimated by the econometrician is (15). The reduced form is
Y t ¼ j1Y t�1 þ y1Z1;t þ y2Z2;t þ ~et,
where j1 ¼ ð1� of Þ=of , y1 ¼ b1=ðof ð1� rÞÞ, y2 ¼ b2=ðof ð1� rÞÞ, and ~et ¼ et=of . We also define~s2e ¼ E½~e2t � ¼ s2e=o
2f .
A.3.1. Moments and cross-moments
Cross-moments between Zi;t and Y t are given by, for i ¼ 1; 2:
E½Zi;tY t� ¼yis2Zi
1� j1ri
¼ �G0i,
E½Zi;tY t�1� ¼ ri
yis2Zi
1� j1ri
¼ ri�G0i,
E½Y tZi;t�1� ¼ ri�G0i þ yiris
2Zi,

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 393
where s2ui ¼ E½u2i;t� and s2Zi ¼ s2ui=ð1� r2i Þ. Moments involving Y t only are
E½Y 2t � ¼
~s2eð1� j2
1Þþð1þ j1r1Þy
21s
2Z1
ð1� j21Þð1� j1r1Þ
þð1þ j1r2Þy
22s
2Z2
ð1� j21Þð1� j1r2Þ
¼ �F0,
E½Y tY t�1� ¼ j1�F0 þ y1r1 �G01 þ y2r2 �G02,
E½Y tY t�2� ¼ j21�F0 þ ðj1 þ r1Þy1r1 �G01 þ ðj1 þ r2Þy2r2 �G02.
A.3.2. Plims of the estimators under omitted variable
We first give the Plims of the estimators assuming model stationarity. Then, we derive some inequalities inthe case of positive serial correlations and positive effect of the forcing variables.
Plim of GMM1: In the case of the just-identified GMM1 estimator with instrument set fY t�1;Z1;tg, Plims ofthe estimators are obtained by solving the following moment conditions:
E½Z1;t � ðY t � aY tþ1 � ð1� aÞY t�1 � bZ1;tÞ� ¼ 0, ð29Þ
E½Y t�1 � ðY t � aY tþ1 � ð1� aÞY t�1 � bZ1;tÞ� ¼ 0, ð30Þ
so that
aGMM1 ¼1
1þ j1
� � ~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1
1þ r2
~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1
1� r22
,
bGMM1 ¼ y11� r1
1� j1r1ð1� aGMM1ð1þ r1Þj1Þ,
where ~L2
1 ¼ y21s2u1=ð1� j1r1Þ
2¼ ð1� r21ÞE½Z1;tY t�
2=V ½Z1;t�.Plim of GMM2: In the case of the GMM2 estimator, based on the instrument set fY t�1;Z1;t;Z2;tg, we first
compute the fitted value from the first-stage regression: Y tþ1 ¼ j21Y t�1 þ y1ðj1 þ r1ÞZ1;t þ y2ðj2 þ r2ÞZ2;t.
Then, the Plims of the second-stage regression are the solution of the following moments conditions:
E½Z1;t � ðY t � aY tþ1 � ð1� aÞY t�1 � bZ1;tÞ� ¼ 0, ð31Þ
E½ðY tþ1 � Y t�1Þ � ðY t � aY tþ1 � ð1� aÞY t�1 � bZ1;tÞ� ¼ 0, ð32Þ
so that
aGMM2 ¼1
1þ j1
� � ~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1
1� j1
~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1
1� j21
,
bGMM2 ¼ y11� r1
1� j1r1ð1� aGMM2ð1þ r1Þj1Þ.
Plim of ML: The reduced form of the misspecified equation (15) is given by
Y t ¼ f1Y t�1 þ m1Z1;t þ ~et.
Estimators of f1 and m1 are therefore obtained from the two following moments conditions:
E½Y t�1 � ðY t � f1Y t�1 þ m1Z1;tÞ� ¼ 0, ð33Þ
E½Z1;t � ðY t � f1Y t�1 þ m1Z1;tÞ� ¼ 0 ð34Þ

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395394
yielding the Plims
fML ¼
j1ð ~s2e þ
~L2
1Þ þðj1 þ r2Þð1� j1r2Þ
y22ð1� r22Þs2u2
~s2e þ ~L2
1 þð1þ j1r2Þð1� j1r2Þ
y22ð1� r22Þs2u2
,
mML ¼ y1 þ ðj1 � fMLÞr1y1
ð1� j1r1Þ.
The Plims of the ML estimators of af and b are given by the conditions aML ¼ 1=ð1þ fMLÞ andbML ¼ mMLaMLð1� rMLÞ:
aML ¼1
1þ j1
� � ~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1þ j1r21� r22
~s2e þ ~L2
1 þy22s
2u2
1� j1r2
1
1� r2
,
bML ¼ y11� r1
1� j1r1ðaMLð1þ r1Þ � r1Þ.
Ranking of the estimators: The ranking of the Plims of GMM and ML estimators is obtained in the typicalcase where the serial correlation of the forcing variables (r1 and r2) is positive.
Corollary 2. When 0pr1;r2p1, the following inequalities hold:
aGMM1pof ,
aMLpof paGMM2.
In addition, when b240, the following inequalities hold:
bGMM2pb1,
bGMM1pb1pbML.
As before, these inequalities are obtained by comparing terms between brackets in the numerator anddenominator of each expression.
References
Anderson, G.A., Moore, G.R., 1985. A linear algebraic procedure for solving perfect foresight models. Economics Letters 17, 247–252.
Blanchard, O.J., Kahn, C.M., 1980. The solution of linear difference models under rational expectations. Econometrica 48, 1305–1311.
Bound, J., Jaeger, D.A., Baker, R.M., 1995. Problems with instrumental variables estimation when the correlation between the
instruments and the endogeneous explanatory variable is weak. Journal of the American Statistical Association 90, 443–450.
Breuch, T., Qian, H., Schmidt, P., Wyhowski, D., 1999. Redundancy of moment conditions. Journal of Econometrics 91, 89–111.
Buse, A., 1992. The bias of instrumental variable estimators. Econometrica 60, 173–180.
Christiano, L.J., Eichenbaum, M., Evans, C., 2005. Nominal rigidities and the dynamic effects of a shock to monetary policy. Journal of
Political Economy 113, 1–45.
Dufour, J.M., 1997. Some impossibility theorems in econometrics with applications to structural and dynamic models. Econometrica 65,
1365–1388.
Dufour, J.M., Khalaf, L., Kichian, M., 2006. Inflation dynamics and the New Keynesian Phillips curve: an identification-robust
econometric analysis. Journal of Economic Dynamics and Control 30, 1707–1727.
Fuhrer, J.C., 1997. The (un)importance of forward looking behavior in price specifications. Journal of Money, Credit, and Banking 29,
338–350.
Fuhrer, J.C., 2000. Habit formation in consumption and its implications for monetary-policy models. American Economic Review 90,
367–390.
Fuhrer, J.C., Rudebusch, G.D., 2004. Estimating the Euler equation for output. Journal of Monetary Economics 51, 1133–1153.

ARTICLE IN PRESSE. Jondeau, H. Le Bihan / Journal of Econometrics 143 (2008) 375–395 395
Fuhrer, J.C., Moore, G.R., Schuh, S.D., 1995. Estimating the linear quadratic inventory model. Maximum likelihood versus generalized
method of moments. Journal of Monetary Economics 35, 115–157.
Galı, J., Gertler, M., 1999. Inflation dynamics: a structural econometric analysis. Journal of Monetary Economics 44, 195–222.
Hahn, J., Hausman, J.A., 2002. A new specification test for the validity of instrumental variables. Econometrica 70, 163–189.
Hall, A.R., Inoue, A., 2003. The large sample behavior of the generalized method of moments estimator in misspecified models. Journal of
Econometrics 114, 361–394.
Hall, A.R., Inoue, A., Jana, K., Shin, C., 2007. Information in the generalized method of moments estimation and entropy based moment
selection. Journal of Econometrics 138, 488–512.
Hansen, L.P., 1982. Large sample properties of generalized method of moments estimator. Econometrica 50, 1029–1054.
Hansen, L.P., Heaton, J., Yaron, A., 1996. Finite-sample properties of some alternative GMM estimators. Journal of Business and
Economic Statistics 14, 262–280.
Hausman, J.A., 1978. Specification tests in econometrics. Econometrica 46, 1251–1271.
Hausman, J.A., Taylor, W.E., 1981. A generalized specification test. Economics Letters 8, 239–245.
Jondeau, E., Le Bihan, H., 2005. Testing for a forward-looking Phillips curve. Additional evidence from European and US data.
Economic Modelling 22, 521–550.
Jondeau, E., Le Bihan, H., Galles, C., 2004. Assessing generalized method of moments estimates of the Federal Reserve reaction function.
Journal of Business and Economic Statistics 22, 225–239.
Kleibergen, F., 2002. Pivotal statistics for testing structural parameters in instrumental variables regression. Econometrica 70, 1781–1804.
Kozicki, S., Tinsley, P.A., 2002. Alternative sources of the lag dynamics of inflation. Federal Reserve Bank of Kansas City Working Paper
02-12.
Kurmann, A., 2007. VAR based estimation of Euler equations, with an application to new Keynesian pricing. Journal of Economics
Dynamics and Control 31, 767–796.
Linde, J., 2005. Estimating New-Keynesian Phillips curves: a full information maximum likelihood approach. Journal of Monetary
Economics 52, 1135–1142.
Maasoumi, E., Phillips, P.C.B., 1982. On the behavior of inconsistent instrumental variable estimators. Journal of Econometrics 19,
183–201.
Mavroeidis, S., 2005. Identification issues in forward-looking monetary models estimated by GMM, with an application to the New
Phillips curve. Journal of Money, Credit, and Banking 37, 421–448.
Nason, J.M., Smith, G.W., 2005. Identifying the New Keynesian Phillips curve. Working Paper 2005-1, Federal Reserve Bank of Atlanta.
Nelson, C.R., Startz, R., 1990. Some further results on the exact small sample properties of the instrumental variables estimator.
Econometrica 58, 967–976.
Newey, W.K., 1985a. Maximum likelihood specification testing and conditional moment tests. Econometrica 53, 1047–1070.
Newey, W.K., 1985b. Generalized method of moments specification testing. Journal of Econometrics 29, 229–256.
Newey, W.K., West, K.D., 1987. A simple, positive definite, heteroscedasticity and autocorrelation consistent covariance matrix.
Econometrica 55, 703–708.
Pesaran, H., 1987. The Limits to Rational Expectations. Basil Blackwell, Oxford.
Rudebusch, G.D., 2002a. Assessing nominal income rules for monetary policy with model and data uncertainty. Economic Journal 112,
402–432.
Rudebusch, G.D., 2002b. Term structure evidence on interest rate smoothing and monetary policy inertia. Journal of Monetary
Economics 49, 1161–1187.
Rudd, J., Whelan, K., 2005. New tests of the New-Keynesian Phillips curve. Journal of Monetary Economics 52, 1167–1187.
Sargent, T.J., 1979. A note on maximum likelihood estimation of the rational expectations model of the term structure. Journal of
Monetary Economics 5, 133–143.
Staiger, D., Stock, J.H., 1997. Instrumental variables regression with weak instruments. Econometrica 65, 557–586.
Stock, J.H., Wright, J.H., 2000. GMM with weak identification. Econometrica 68, 1055–1096.
Stock, J.H., Wright, J.H., Yogo, M., 2002. A survey of weak instruments and weak identification in generalized method of moments.
Journal of Business and Economic Statistics 20, 518–529.
Verbeek, M., Nijman, T., 1992. Testing for selectivity bias in panel data models. International Economic Review 33, 681–704.
West, K.D., 1997. Another heteroskedasticity- and autocorrelation-consistent covariance matrix estimator. Journal of Econometrics 76,
171–191.
White, H., 1982. Maximum likelihood estimation of misspecified models. Econometrica 50, 1–25.