-
8/10/2019 Exact Recovery
1/41
Robust Uncertainty Principles:
Exact Signal Reconstruction from Highly Incomplete
Frequency Information
Emmanuel Candes, Justin Romberg, and Terence Tao
Applied and Computational Mathematics, Caltech, Pasadena, CA
91125 Department of Mathematics, University of California, Los
Angeles, CA 90095
June 2004; Revised August 2005
Abstract
This paper considers the model problem of reconstructing an
object from incompletefrequency samples. Consider a discrete-time
signal f CN and a randomly chosen setof frequencies . Is it
possible to reconstruct ffrom the partial knowledge of its
Fouriercoefficients on the set ?
A typical result of this paper is as follows. Suppose that fis a
superposition of|T|spikes f(t) =
Tf() (t ) obeying
|T| CM (log N)1 ||,
for some constant CM > 0. We do not know the locations of the
spikes nor their
amplitudes. Then with probability at least 1O(NM
),fcan be reconstructed exactlyas the solution to the1
minimization problem
ming
N1t=0
|g(t)|, s.t. g() = f() for all .
In short, exact recovery may be obtained by solving a convex
optimization problem.We give numerical values for CM which depend
on the desired probability of success.
Our result may be interpreted as a novel kind of nonlinear
sampling theorem. Ineffect, it says that any signal made out of|T|
spikes may be recovered by convexprogramming from almost every set
of frequencies of size O(|T| log N). Moreover, thisis nearly
optimal in the sense that anymethod succeeding with probability
1O(NM)would in general require a number of frequency samples at
least proportional to
|T
| log N.The methodology extends to a variety of other situations
and higher dimensions.
For example, we show how one can reconstruct a piecewise
constant (one- or two-dimensional) object from incomplete frequency
samplesprovided that the number of
jumps (discontinuities) obeys the condition aboveby minimizing
other convex func-tionals such as the total variation off.
Keywords. Random matrices, free probability, sparsity,
trigonometric expansions, uncertaintyprinciple, convex
optimization, duality in optimization, total-variation
minimization, image recon-struction, linear programming.
1
-
8/10/2019 Exact Recovery
2/41
Acknowledgments. E. C. is partially supported by a National
Science Foundation grant DMS
01-40698 (FRG) and by an Alfred P. Sloan Fellowship. J. R. is
supported by National Science
Foundation grants DMS 01-40698 and ITR ACI-0204932. T. T. is a
Clay Prize Fellow and is
supported in part by grants from the Packard Foundation. E. C.
and T.T. thank the Institute for
Pure and Applied Mathematics at UCLA for their warm hospitality.
E. C. would like to thank
Amos Ron and David Donoho for stimulating conversations, and
Po-Shen Loh for early numericalexperiments on a related project. We
would also like to thank Holger Rauhut for corrections on an
earlier version and the anonymous referees for their comments
and references.
1 Introduction
In many applications of practical interest, we often wish to
reconstruct an object (a discretesignal, a discrete image, etc.)
from incomplete Fourier samples. In a discrete setting, wemay pose
the problem as follows; let fbe the Fourier transform of a discrete
object f(t),t= (t1, . . . , td) ZdN := {0, 1, . . . , N 1}d,
f() =tZdN
f(t)e2i(1t1+...+dtd)/N.
The problem is then to recover ffrom partial frequency
information, namely, from f(),where = (1, . . . , d) belongs to
some set of cardinality less than N
dthe size of thediscrete object.
In this paper, we show that we can recover f exactly from
observations f| on small setof frequencies provided that f is
sparse. The recovery consists of solving a
straightforwardoptimization problem that finds f of minimal
complexity with f() = f(), .
1.1 A puzzling numerical experiment
This idea is best motivated by an experiment with surprisingly
positive results. Considera simplified version of the classical
tomography problem in medical imaging: we wish toreconstruct a 2D
image f(t1, t2) from samples f| of its discrete Fourier transform
ona star-shaped domain [4]. Our choice of domain is not contrived;
many real imagingdevices collect high-resolution samples along
radial lines at relatively few angles. Figure 1(b)illustrates a
typical case where one gathers 512 samples along each of 22 radial
lines.
Frequently discussed approaches in the literature of medical
imaging for reconstructing anobject from polar frequency samples
are the so-called filtered backprojection algorithms. In
a nutshell, one assumes that the Fourier coefficients at all of
the unobserved frequencies arezero (thus reconstructing the image
of minimal energy under the observation constraints).This strategy
does not perform very well, and could hardly be used for medical
diagnostics[24]. The reconstructed image, shown in Figure 1(c), has
severe nonlocal artifacts causedby the angular undersampling. A
good reconstruction algorithm, it seems, would haveto guess the
values of the missing Fourier coefficients. In other words, one
would needto interpolate f(1, 2). This seems highly problematic,
however; predictions of Fouriercoefficients from their neighbors
are very delicate, due to the global and highly oscillatorynature
of the Fourier transform. Going back to the example in Figure 1, we
can see the
2
-
8/10/2019 Exact Recovery
3/41
(a) (b)
(c) (d)
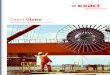
Figure 1: Example of a simple recovery problem. (a) The
Logan-Shepp phantom testimage. (b) Sampling domain in the frequency
plane; Fourier coefficients are sampledalong 22 approximately
radial lines. (c) Minimum energy reconstruction obtained by
settingunobserved Fourier coefficients to zero. (d) Reconstruction
obtained by minimizing the totalvariation, as in (1.1). The
reconstruction is an exact replica of the image in (a).
3
-
8/10/2019 Exact Recovery
4/41
problem immediately. To recover frequency information near
(21/N, 22/N), where21/N is near, we would need to interpolate fat
the Nyquist rate 2/N. However,we only have samples at rate about
/22; the sampling rate is almost 50 times smaller thanthe Nyquist
rate!
We propose instead a strategy based on convex optimization.
Let
g
TV be the total-
variation norm of a two-dimensional objectg. For discrete
datag(t1, t2), 0 t1, t2 N1,gTV =
t1,t2
|D1g(t1, t2)|2 + |D2g(t1, t2)|2,
whereD1is the finite differenceD1g= g(t1, t2)g(t1 1, t2) andD2g=
g(t1, t2)g(t1, t2 1). To recoverf from partial Fourier samples, we
find a solution f to the optimizationproblem
min gTV sub ject to g() = f() for all . (1.1)In a nutshell,
given partial observation f|, we seek a solution f with minimum
complexityhere Total Variation (TV)and whose visible coefficients
match those of the unknownobjectf. Our hope here is to partially
erase some of the artifacts that classical reconstruc-
tion methods exhibit (which tend to have large TV norm) while
maintaining fidelity to theobserved data via the constraints on the
Fourier coefficients of the reconstruction.
When we use (1.1) for the recovery problem illustrated in Figure
1 (with the popular Logan-Shepp phantom as a test image), the
results are surprising. The reconstruction is exact;that is, f = f!
This numerical result is also not special to this phantom. In fact,
weperformed a series of experiments of this type and obtained
perfect reconstruction on manysimilar test phantoms.
1.2 Main results
This paper is about a quantitative understanding of this very
special phenomenon. Forwhich classes of signals/images can we
expect perfect reconstruction? What are the trade-offs between
complexity and number of samples? In order to answer these
questions, wefirst develop a fundamental mathematical understanding
of a special one-dimensional modelproblem. We then exhibit
reconstruction strategies which are shown to exactly
reconstructcertain unknown signals, and can be extended for use in
a variety of related and sophisti-cated reconstruction
applications.
For a signalf CN, we define the classical discrete Fourier
transform Ff= f :CN CNby
f() :=N1
t=0
f(t) e2it/N, = 0, 1, . . . , N
1. (1.2)
If we are given the value of the Fourier coefficients f() for
allfrequencies ZN, thenone can obviously reconstruct fexactly via
the Fourier inversion formula
f(t) = 1
N
N1=0
f() e2it/N.
Now suppose that we are only given the Fourier coefficients f|
sampled on some partialsubset ZNof all frequencies. Of course, this
is not enough information to reconstruct
4
-
8/10/2019 Exact Recovery
5/41
f exactly in general; f has N degrees of freedom and we are only
specifying|| < N ofthose degrees (here and below|| denotes the
cardinality of ).Suppose, however, that we also specify that fis
supported on a small (but a prioriunknown)subsetT ofZN; that is, we
assume that fcan be written as a sparse superposition of spikes
f(t) =T
f()(t ), (t) = 1{t=0}.
In the case where Nis prime, the following theorem tells us that
it is possible to recover fexactly if|T| is small enough.
Theorem 1.1 Suppose that the signal lengthN is a prime integer.
Let be a subset of{0, . . . , N 1}, and letf be a vector supported
onT such that
|T| 12||. (1.3)
Thenfcan be reconstructed uniquely from andf|. Conversely, ifis
not the set of allNfrequencies, then there exist distinct vectorsf
, g such that|supp(f)|, |supp(g)| 12 ||+ 1and such thatf|= g|.
Proof We will need the following lemma [29], from which we see
that with knowledge ofT, we can reconstruct funiquely (using linear
algebra) from f|:
Lemma 1.2 ( [29], Corollary 1.4) Let Nbe a prime integer and T,
be subsets ofZN.Put2(T) (resp. 2()) to be the space of signals that
are zero outside ofT (resp. ). Therestricted Fourier transformFT:
2(T) 2() is defined as
FTf := f| for allf 2(T),
If|T| = ||, thenFT is a bijection; as a consequence, we thus see
thatFT is injectivefor|T| || and surjective for|T| ||. Clearly, the
same claims hold if the FouriertransformF is replaced by the
inverse Fourier transformF1.
To prove Theorem 1.1, assume that|T| 12 ||. Suppose for
contradiction that there weretwo objects f, g such that f| = g|
and|supp(f)|, |supp(g)| 12 ||. Then the Fouriertransform off g
vanishes on , and|supp(f g)| ||. By Lemma 1.2 we see thatFsupp(fg)
is injective, and thus f g= 0. The uniqueness claim follows.
We now examine the converse claim. Since|| < N, we can find
disjoint subsets T, S ofZN such that|T|, |S| 12 || + 1 and|T| +
|S|=|| + 1. Let 0 be some frequency whichdoes not lie in . Applying
Lemma 1.2, we have that FTS{0} is a bijection, and thuswe can find
a vector h supported on T Swhose Fourier transform vanishes on but
isnonzero on 0; in particular, h is not identically zero. The claim
now follows by takingf :=h|T and g := h|S.
Note that ifN is not prime, the lemma (and hence the theorem)
fails, essentially becauseof the presence of non-trivial subgroups
ofZN with addition modulo N; see Sections 1.3
5
-
8/10/2019 Exact Recovery
6/41
and 1.4 for concrete counter examples, and [7], [29] for further
discussion. However, itis plausible to think that Lemma 1.2
continues to hold for non-prime N if T and areassumed to
begenericin particular, they are not subgroups ofZN, or cosets of
subgroups.IfTand are selected uniformly at random, then it is
expected that the theorem holdswith probability very close to one;
one can indeed presumably quantify this statement by
adapting the arguments given above but we will not do so here.
However, we refer the readerto Section 1.7 for a rapid presentation
of informal arguments pointing in this direction.
A refinement of the argument in Theorem 1.1 shows that for fixed
subsets T, S of timedomain an in the frequency domain, the space of
vectors f, g supported on T, S suchthat f|= g| has dimension|T S|
|| when|T S| ||, and has dimension|T S|otherwise. In particular, if
we let (Nt) denote those vectors whose support has size atmost Nt,
then set of the vectors in (Nt) which cannot be reconstructed
uniquely in thisclass from the Fourier coefficients sampled at , is
contained in a finite union of linearspaces of dimension at most
2Nt ||. Since (Nt) itself is a finite union of linear spacesof
dimensionNt, we thus see that recovery off from f| is in principle
possiblegenericallywhenever|supp(f)|= Nt 0 is aconstant): in these
cases, solving the convex problem(P1) recoversf exactly.
To establish this upper bound, we will assume that the observed
Fourier coefficients arerandomly sampled. Given the number N of
samples to take in the Fourier domain, we
6
-
8/10/2019 Exact Recovery
7/41
choose the subset uniformly at random from all sets of this
size; i.e. each of the NN
possible subsets are equally likely. Our main theorem can now be
stated as follows.
Theorem 1.3 Letf CN be a discrete signal supported on an unknown
setT, and choose of size|| =N uniformly at random. For a given
accuracy parameterM, if
|T| CM (log N)1 ||, (1.6)
then with probability at least 1 O(NM), the minimizer to the
problem (1.5) is uniqueand is equal to f.
Notice that (1.6) essentially says that |T| is of size ||,
modulo a constant and a logarithmicfactor. Our proof gives an
explicit value ofCM, namely, CM 1/[23(M+ 1)] (valid for|| N/4,M 2
andN 20, say) although we have not pursued the question of
exactlywhat the optimal value might be.
In Section 5, we present numerical results which suggest that in
practice, we can expect to
recovermostsignalsfmore than 50% of the time if the size of the
support obeys |T| ||/4.By most signals, we mean that we empirically
study the success rate for randomly selectedsignals, and do not
search for the worst case signalfthat which needs the most
frequencysamples. For|T| ||/8, the recovery rate is above 90%.
Empirically, the constants 1/4and 1/8 do not seem to vary for N in
the range of a few hundred to a few thousand.
1.3 For almost every
As the theorem allows, there exist sets and functions f for
which the 1-minimizationprocedure does not recover f correctly,
even if|supp(f)| is much smaller than||. Wesketch two counter
examples:
A discrete Dirac comb. Suppose that N is a perfect square and
consider the picket-fence signal which consists of spikes of unit
height and with uniform spacing equal to
N. This signal is often used as an extremal point for
uncertainty principles [7, 8]as one of its remarkable properties is
its invariance through the Fourier transform.Hence suppose that is
the set of all frequencies but the multiples of
N, namely,
|| =N N. Then f|= 0 and obviously the reconstruction is
identically zero.Note that the problem here does not really have
anything to do with 1-minimizationper se;fcannot be reconstructed
from its Fourier samples on thereby showing thatTheorem 1.1 does
not work as is for arbitrary sample sizes.
Boxcar signals. The example above suggests that in some sense
|T| must not be greaterthan about
||. In fact, there exist more extreme examples. Assume the
sample sizeNis large and consider for example the indicator
function fof the interval T := {t:N0.01 < t N/2< N0.01} and
let be the set :={ :N/3< c for some absolute constant c > 0.
Because of
7
-
8/10/2019 Exact Recovery
8/41
this, the signalf |h|2 will have smaller 1-norm thanf for >0
sufficiently small(and Nsufficiently large), while still having the
same Fourier coefficients as fon .Thus in this case f is not the
minimizer to the problem (P1), despite the fact thatthe support off
is much smaller than that of .
The above counter examples relied heavily on the special choice
of (and to a lesserextent of supp(f)); in particular, it needed the
fact that the complement of contained alarge interval (or more
generally, a long arithmetic progression). But for most sets ,
largearithmetic progressions in the complement do not exist, and
the problem largely disappears.In short, Theorem 1.3 essentially
says that for mostsets ofTof size about||, there is noloss of
information.
1.4 Optimality
Theorem 1.3 states that for any signal fsupported on an
arbitrary setTin the time domain,(P1) recoversfexactlywith high
probability from a number of frequency samples thatis within a
constant ofM |T| log N. It is natural to wonder whether this is a
fundamentallimit. In other words, is there an algorithm that can
recover an arbitrary signal from farfewer random observations, and
with the same probability of success?
It is clear that the number of samples needs to be at least
proportional to |T|, otherwiseFT will not be injective. We argue
here that it must also be proportional to Mlog N toguarantee
recovery of certain signals from the vast majority of sets of a
certain size.
Suppose f is the Dirac comb signal discussed in the previous
section. If we want to havea chance of recovering f, then at the
very least, the observation set and the frequencysupport W = supp
fmust overlap at one location; otherwise, all of the observations
arezero, and nothing can be done. Choosing uniformly at random, the
probability that it
includes none of the members ofW is
P ( W = ) =NN
||
N|| 1 2||
N
N,
where we have used the assumption that||>|T|= N. Then for P(
W =) to besmaller than NM, it must be true that
N log
1 2||
N
Mlog N,
and if we make the restriction that|| cannot be as large as N/2,
meaning that log(1 2||N ) 2||N , we have
|| Const M
N log N.For the Dirac comb then, any algorithm must have|| |T| M
log Nobservations for theidentified probability of success.
Examples for larger supports T exist as well. If N is an even
power of two, we can su-perimpose 2m Dirac combs at dyadic shifts
to construct signals with time-domain support
8
-
8/10/2019 Exact Recovery
9/41
|T|= 2mN and frequency-domain support|W|= 2mN for m= 0, . . . ,
log2
N. Thesame argument as above would then dictate that
|| Const M N|W| log N= Const M |T| log N.
In short, Theorem 1.3 identifies a fundamental limit. No
recovery can be successful for allsignals using significantly fewer
observations.
1.5 Extensions
As mentioned earlier, results for our model problem extend
easily to higher dimensionsand alternate recovery scenarios. To be
concrete, consider the problem of recovering aone-dimensional
piecewise constant signal via
ming
tZN
|g(t) g(t 1)| g|= f|, (1.7)
where we adopt the convention that g(1) = g(N 1). In a nutshell,
model (1.5) isobtained from (1.7) after differentiation. Indeed,
let be the vector of first difference(t) =g(t) g(t 1), and note
that (t) = 0. Obviously,
() = (1 e2i/N)g(), for all= 0and, therefore, with () = (1
e2i/N)1, the problem is identical to
min
1 |\{0}= (f)|\{0}, (0) = 0,
which is precisely what we have been studying.
Corollary 1.4 Put T ={t, f(t)= f(t1)}. Under the assumptions of
Theorem 1.3,the minimizer to the problem (1.7) is unique and is
equal fwith probability at least 1 O(NM)provided thatfbe adjusted
so that
f(t) = f(0).
We now explore versions of Theorem 1.3 in higher dimensions. To
be concrete, considerthe two-dimensional situation (statements in
arbitrary dimensions are exactly of the sameflavor):
Theorem 1.5 PutN=n2. We letf(t1, t2), 1t1, t2n be a discrete
real-valued imageand of a certain size be chosen uniformly at
random. Assume that for a given accuracyparameterM,fis supported
onT obeying(1.6). Then with probability at least1
O(NM),
the minimizer to the problem (1.5) is unique and is equal to
f.
We will not prove this result as the strategy is exactly
parallel to that of Theorem 1.3.Letting D1fbe the horizontal finite
differences D1f(t1, t2) = f(t1, t2) f(t1 1, t2) andD2f be the
vertical analog, we have just seen that we can think about the data
as theproperly renormalized Fourier coefficients of D1f and D2f.
Now put d = D1f+iD2f,wherei2 = 1. Then the minimum total-variation
problem may be expressed as
min 1 subject to F= Fd, (1.8)
9
-
8/10/2019 Exact Recovery
10/41
where Fis a partial Fourier transform. One then obtains a
statement for piecewise constant2D functions, which is similar to
that for sparse 1D signals provided that the support offbe replaced
by{(t1, t2) : |D1f(t1, t2)|2 + |D2f(t1, t2)|2 = 0}. We omit the
details.The main point here is that there actually are a variety of
results similar to Theorem1.3. Theorem 1.5 serves as another
recovery example, and provides a precise quantitative
understanding of the surprising result discussed at the
beginning of this paper.
To be complete, we would like to mention that for complex valued
signals, the minimum1 problem (1.5) and, therefore, the minimum TV
problem (1.1) can be recast as specialconvex programs known as
second order cone programs (SOCPs). For example, (1.8) isequivalent
to
mint
u(t) subject to
|1(t)|2 + |2(t)|2 u(t), (1.9)
F(1+ i2) =Fd,
with variables u, 1 and 2 in RN (1 and 2 are the real and
imaginary parts of). If in
addition, is real valued, then this is a linear program. Much
progress has been made inthe past decade on algorithms to solve
both linear and second-order cone programs [25],and many
off-the-shelf software packages exist for solving problems such as
(P1) and (1.9).
1.6 Relationship to uncertainty principles
From a certain point of view, our results are connected to the
so-called uncertainty principles[7,8] which say that it is
difficult to localize a signal f CN both in time and frequencyat
the same time. Indeed, classical arguments show that f is the
unique minimizer of (P1)if and only if
tZN|f(t) + h(t)| >
tZN|f(t)|, h = 0, h|= 0
PutT= supp(f) and apply the triangle inequalityZN
|f(t) + h(t)| =T
|f(t) + h(t)| +Tc
|h(t)| T
|f(t)| |h(t)| +Tc
|h(t)|.
Hence, a sufficient condition to establish that f is our unique
solution would be to showthat
T
|h(t)| |T|, and ifFT is injective (has full column rank), there
are many trigono-metric polynomials supported on in the Fourier
domain which satisfy (2.1). We choose,with the hope that its
magnitude on Tc is small, the one with minimum energy:
P := FFT(FTFT)1 sgn(f) (2.3)
whereF =FZN is the Fourier transform followed by a restriction
to the set ; theembedding operator : 2(T) 2(ZN) extends a vector
onTto a vector onZNby placingzeros outside ofT; and is the dual
restriction map f=f|T. It is easy to see that P issupported on ,
and noting thatF= FT,Palso satisfies (2.1)
P=sgn(f).
Fixing fand its support T, we will prove Theorem 1.3 by
establishing that if the set ischosen uniformly at random from all
sets of size N C1M |T| log N, then
1. Invertibility. The operatorFT is injective, meaning thatFTFT
in (2.3) isinvertible, with probability 1 O(NM).
2. Magnitude onTc. The function P in (2.3) obeys|P(t)|
-
8/10/2019 Exact Recovery
15/41
2.3 The Bernoulli model
A set of Fourier coefficients is sampled using the Bernoulli
model with parameter 0 <
-
8/10/2019 Exact Recovery
16/41
With the above in mind, we continue
P
Failure() N
k=1
P (Failure(k)) P|| =k
P (Failure()) Nk=1
P|| =k 12 P (Failure()) .
Thus if we can bound the probability of failure for the
Bernoulli model, we know that thefailure rate for the uniform model
will be no more than twice as large.
3 Construction of the Dual Polynomial
The Bernoulli model holds throughout this section, and we
carefully examine the minimumenergy dual polynomialPdefined in
(2.3) and establish Theorem 2.2 and Lemma 2.3. The
main arguments hinge on delicate moment bounds for random
matrices, which are presentedin Section 4. From here on forth, we
will assume that| N| > Mlog Nsince the claim isvacuous otherwise
(as we will see, CM 1/Mand thus (1.6) will force f 0, at whichpoint
it is clear that the solution to (P1) is equal tof= 0).
We will find it convenient to rewrite (2.3) in terms of the
auxiliary matrix
Hf(t) :=
tT:t=t
e2i(tt)
N f(t), (3.1)
and defineH0=
H.
To see the relevance of the operators H andH0, observe that
1||H = 1
||FFT
IT 1||H0 = 1
||FTFT
whereIT is the identity for2(T) (note that = IT). Then
P=
1||H
IT 1||H0
1sgnf.
The point here is to separate the constant diagonal ofFTFT(which
is || everywhere)from the highly oscillatory off-diagonal. We will
see that choosing at random makes H0essentially a noise matrix,
making IT 1||H0 well conditioned.
3.1 Invertibility
We would like to establish invertibility of the matrix IT 1||H0
with high probability. Oneway to proceed would be to show that the
operator norm (i.e. the largest eigenvalue) ofH0
16
-
8/10/2019 Exact Recovery
17/41
is less than||. A straightforward way to do this is to bound the
operator norm H0 bythe Frobenius normH0F:
H02 H02F := Tr(H0H0 ) =t1,t2
|(H0)t1,t2 |2. (3.2)
where (H0)t1,t2 is the matrix element at row t1 and column
t2.
Using relatively simple statistical arguments, we can show that
with high probability|(H0)t1,t2|2 ||. Applying (3.2) would then
yield invertibility when|T|
||. Toshow that H0 is small for larger sets T (recall that|T| ||
(log N)1 is the desiredresult), we use estimates of the Frobenius
norm of a large powerofH0, taking advantageof cancellations arising
from the randomness of the matrix coefficients ofH0.
Our argument relies on a key estimate which we introduce now and
shall be discussed ingreater detail in Section 3.2. Assume that
1/(1 +e) and n N/[4|T|(1 )]. Thenthe 2nth moment ofH0 obeys
E(Tr(H2n0 )) 2 4e(1 )n
nn+1 | N|n |T|n+1. (3.3)
Now this moment bound gives an estimate for the operator norm
ofH0. To see this, notethat since H0 is self-adjoint
H02n = Hn0 2 Hn0 2F= Tr(H2n0 ).
Letting be a positive number 0 <
-
8/10/2019 Exact Recovery
18/41
Proof The first part of the theorem follows from (3.4). For the
second part, we begin byobserving that a typical application of the
large deviation theorem gives
P(||
-
8/10/2019 Exact Recovery
19/41
3.3 Magnitude of the polynomial on the complement ofT
In the remainder of Section 3, we argue that max t/T|P(t)|< 1
with high probability andprove Lemma 2.3. We first develop an
expression for P(t) by making use of the algebraicidentity
(1 M)1
= (1 Mn
)1
(1 + M+ . . . + Mn
1
).Indeed, we can write
(IT 1||nHn0 )
1 =IT+ R where R=p=1
1
||pnHpn0 ,
so that the inverse is given by the truncated Neumann series
(IT 1||H0)1 = (IT+ R)
n1m=0
1
||mHm0 . (3.10)
The point is that the remainder term R is quite small in the
Frobenius norm: suppose thatHF ||, then
RF n
1 n .In particular, the matrix coefficients ofR are all
individually less than n/(1 n). Intro-duce the -norm of a matrix
asM= supx1 M x which is also given by
M = supi
j
|M(i, j)|.
It follows from the Cauchy-Schwarz inequality that
M2 supi
#col(M)j
|M(i, j)|2 #col(M) M2F,
where by # col(M) we mean the number of columns ofM. This
observation gives the crudeestimate
R |T|1/2 n
1 n . (3.11)As we shall soon see, the bound (3.11) allows us to
effectively neglect the R term in thisformula; the only remaining
difficulty will be to establish good bounds on the truncatedNeumann
series 1||H
n1m=0
1||m H
m0 .
3.4 Estimating the truncated Neumann series
From (2.3) we observe that on the complement ofT
P = 1
||H(IT 1
||H0)1sgn(f),
since the component in (2.3) vanishes outside ofT. Applying
(3.10), we may rewriteP as
P(t) =P0(t) + P1(t), t Tc,
19
-
8/10/2019 Exact Recovery
20/41
where
P0= Snsgn(f), P1= 1
||HR(I+ Sn1)sgn(f)
and
Sn =
n
m=1 |
|m(H)m.
Leta0, a1> 0 be two numbers with a0+ a1= 1. Then
P
suptTc
|P(t)| >1
P(P0> a0) + P(P1> a1),
and the idea is to bound each term individually. Put Q0 =
Sn1sgn(f) so that P1 =1||HR
(sgn(f) + Q0). With these notations, observe that
P1 1||HR(1 + Q0).
Hence, bounds on the magnitude ofP1 will follow from bounds onHR
together withbounds on the magnitude of Q0. It will be sufficient
to derive bounds onQ0 (sinceQ0 Q0) which will follow from those
onP0 sinceQ0 is nearly equal to P0 (theydiffer by only one very
small term).
Fix t Tc and write P0(t) as
P0(t) =
nm=1
||mXm(t), Xm = (H)m sgn(f).
The idea is to use moment estimates to control the size of each
term Xm(t).
Lemma 3.4 Setn= km. ThenE|Xm(t0)|2k
obeys the same estimate as that in Theorem3.3 (up to a
multiplicative factor|T|1), namely,
E|Xm(t0)|2k 1|T|Bn, (3.12)
whereBn is the right-hand side of (3.9). In particular,
following (3.3)
E|Xm(t0)|2k 2 en (4/(1 ))n nn+1 |T|n| N|n, (3.13)provided thatn
N4|T|(1) .
The proof of these moment estimates mimics that of Theorem 3.3
and may be found in theAppendix.
Lemma 3.5 Fix a0 = .91. Suppose that|T| obeys (3.5) and let BM
be the set where|| < (1 M) | N| with M as in (3.8). For each t
ZN, there is a set At with theproperty
P(At)> 1 n, n = 2(1 M)2n n2 en2n (0.42)2n,and
|P0(t)| < .91, |Q0(t)| < .91 onAt BcM.
20
-
8/10/2019 Exact Recovery
21/41
As a consequence,P(sup
t|P0(t)| > a0) NM+ N n,
and similarly forQ0.
Proof We suppose that n is of the form n= 2J
1 (this property is not crucial and onlysimplifies our
exposition). For each m and k such that kmn, it follows from (3.5)
and(3.13) together with some simple calculations that
E|Xm(t)|2k 2n en2n | N|2n. (3.14)
Again|| | N| and we will develop a bound on the set BcM where||
(1 M)| N|.On this set
|P0(t)| nm=1
Ym, Ym= 1
(1 M)m | N|m|Xm(t)|.
Fix j >0, 0 j < J, such thatJ1j=0 2j j a0.
Obviously,P(
nm=1
Ym> a0) J1j=0
2j+11m=2j
P(Ym > j) J1j=0
2j+11m=2j
2Kjj E|Ym|2Kj .
whereKj = 2Jj . Observe that for eachm with 2j m .91) 2(1 M)2n
n2 en2n (0.42)2n. (3.15)
The claim for Q0 is identical and the lemma follows.
Lemma 3.6 Fixa1= .09. Suppose that the pair(, n) obeys|T|3/2 n1n
a1/2. ThenP1 a1
on the eventA {HF ||}, for someA obeyingP(A) 1 O(NM).
Proof As we observed before, (1)P1 HR(1 + Q0), and (2) Q0
obeysthe bound stated in Lemma 3.5. Consider then the event{Q0 1}.
On this event,P1 a1 if 1||HR a1/2. The matrix H obeys 1||H |T|
since H has
21
-
8/10/2019 Exact Recovery
22/41
|T| columns and each matrix element is bounded by|| (note that
far better bounds arepossible). It then follows from (3.11)
that
H R |T|3/2 n
1 n ,
with probability at least 1 O(NM). We then simply need to choose
and n such thatthe right-hand side is less than a1/2.
3.5 Proof of Lemma 2.3
We have now assembled all the intermediate results to prove
Lemma 2.3 (and hence our maintheorem). Indeed, we proved that|P(t)|
< 1 for all t Tc (again with high probability),provided that and
n be selected appropriately as we now explain.
Fix M > 0. We choose = .42(1 M), where M is taken as in
(3.8), and n to be the
nearest integer to (M+ 1) log N.
1. With this special choice,n = 2[(M+1)log N]2 N(M+1) and,
therefore, Lemma 3.5
implies that both P0 and Q0 are bounded by .91 outside ofTc with
probability at
least 1 [1 + 2((M+ 1) log N)2] NM.2. Lemma 3.6 assures that it
is sufficient to have N3/2n/(1n) .045 to have
|P1(t)| < .09 on Tc. Because log(.42) .87 and log(.045) 3.10,
this condition isapproximately equivalent to
(1.5 .87(M+ 1)) log N 3.10.
Take M 2, for example; then the above inequality is satisfied as
soon as N 17.To conclude, Lemma 2.3 holds with probability
exceeding 1 O([(M+ 1) log N)2] NM)ifT obeys
|T| CM| N|log N
, CM= .422(1 )
4 (M+ 1)(1 + o(1)).
In other words, we may take CMin Theorem 1.3 to be of the
form
CM= 1
22.6(M+ 1)(1 + o(1)). (3.16)
4 Moments of Random Matrices
This section is devoted entirely to proving Theorem 3.3 and it
may be best first to sketchhow this is done. We begin in Section
4.1 by giving a preliminary expansion of the quantityE(Tr(H2n0 )).
However, this expansion is not easily manipulated, and needs to be
rearrangedusing the inclusion-exclusion formula, which we do in
Section 4.2, and some elements ofcombinatorics (the Stirling number
identities) which we give in Section 4.3. This allowsus to
establish a second, more usable, expansion forE(Tr(H2n0 )) in
Section 4.4. The proof
22
-
8/10/2019 Exact Recovery
23/41
of the theorem then proceeds by bounding the individual terms in
this second expansion.There are two quantities in the expansion
that need to be estimated; a purely combinatorialquantity P(n, k)
which we estimate in Section 4.5, and a power series Fn() which
weestimate in Section 4.6. Both estimates are combined in Section
4.7 to prove the theorem.
Before we begin, we wish to note that the study of the
eigenvalues of operators like H0
has a bit of historical precedence in the information theory
community. Note that ITH0 is essentially the composition of three
projection operators; one that time limits afunction toT, followed
by a bandlimiting to , followed by a final restriction to T.
Thedistribution of the eigenvalues of such operators was studied by
Landau and others [2022]while developing the prolate spheroidal
wave functions that are now commonly used insignal processing and
communications. This distribution was inferred by examining
thetrace of large powers of this operator (see [22] in particular),
much as we will do here.
4.1 A First Formula for the Expected Value of the Trace
of(H0)2n
Recall thatH0(t, t), t, t T, is the|T| |T| matrix whose entries
are defined by
H0(t, t) =
0 t= t,c(t t) t =t, c(u) =
e2iN u. (4.1)
A diagonal element of the 2nth power ofH0 may be expressed
as
H2n0 (t1, t1) =
t2,...,t2n: tj=tj+1c(t1 t2) . . . c(t2n t1),
where we adopt the convention that t2n+1= t1 whenever convenient
and, therefore,
E(Tr(H2n0 )) =
t1,...,t2n: tj=tj+1E 1,...,2n
e2iNP2n
j=1j(tjtj+1) .Using (2.5) and linearity of expectation, we can
write this as
t1,...,t2n: tj=tj+1
01,...,2nN1
e2iN
P2nj=1j(tjtj+1) E
2nj=1
I{j}
.
The idea is to use the independence of the I{j}s to simplify
this expression substantially;however, one has to be careful with
the fact that some of the j s may be the same, atwhich point one
loses independence of those indicator variables. These difficulties
require
a certain amount of notation. We let ZN ={0, 1, . . . , N 1} be
the set of all frequenciesas before, and letA be the finite set A
:= {1, . . . , 2n}. For all := (1, . . . , 2n), we definethe
equivalence relation on A by saying that j j if and only ifj = j.
We letP(A) be the set of all equivalence relations on A. Note that
there is a partial ordering onthe equivalence relations as one can
say that12 if1 is coarser than2, i.e. a2 bimpliesa 1b for alla, b
A. Thus, the coarsest element inP(A) is the trivial
equivalencerelation in which all elements of A are equivalent (just
one equivalence class), while thefinest element is the equality
relation =, i.e. each element ofA belongs to a distinct class(|A|
equivalence classes).
23
-
8/10/2019 Exact Recovery
24/41
For each equivalence relationinP, we can then define the sets ()
Z2nN by() := { Z2nN :=}
and the sets () Z2nN by
() := P:() = { Z2n
N :}.
Thus the sets{() : P} form a partition ofZ2nN . The sets () can
also be definedas
() := { Z2nN :a= b whenever a b}.For comparison, the sets () can
be defined as
() := { Z2nN :a = b whenever a b, and a=b whenever a b}.We give
an example: suppose n = 2 and fix such that 1 4 and 2 3 (exactly
2equivalence classes); then () :={ Z4N : 1 = 4, 2 = 3, and 1= 2}
while() := { Z
4N :1=4, 2 = 3}.
Now, let us return to the computation of the expected value.
Because the random variablesIk in (2.4) are independent and have
all the same distribution, the quantity E[
2nj=1 Ij ]
depends only on the equivalence relation and not on the value of
itself. Indeed, wehave
E(
2nj=1
Ij) =|A/|,
where A/ denotes the equivalence classes of. Thus we can rewrite
the precedingexpression as
E(Tr(H2n
0 )) =
t1,...,t2n: tj=tj+1
P(A) |A/
| () e
2iN
P2nj=1j(tj
tj+1)
(4.2)
whereranges over all equivalence relations.We would like to
pause here and consider (4.2). Taken= 1, for example. There are
onlytwo equivalent classes on{1, 2}and, therefore, the right-hand
side is equal to
t1,t2: t1=t2
(1,2)Z2N:1=2e2iN 1(t1t1) + 2
(1,2)Z2N:1=2
e2iN 1(t1t2)+i2(t2t1)
.
Our goal is to rewrite the expression inside the brackets so
that the exclusion 1=2 doesnot appear any longer, i.e. we would
like to rewrite the sum over Z
2N : 1= 2 in
terms of sums over Z2N :1 =2, and over Z2N. In this special
case, this is quiteeasy as
Z2N:1=2=
Z2N
Z2N:1=2The motivation is as follows: removing the exclusion
allows to rewrite sums as product,e.g.
Z2N=1
e2iN 1(t1t2)
2
e2iN 2(t2t1);
24
-
8/10/2019 Exact Recovery
25/41
and each factor is equal to either Nor 0 depending on whether
t1= t2 or not.
The next section generalizes these ideas and develop an
identity, which allows us to rewritesums over () in terms of sums
over ().
4.2 Inclusion-Exclusion formulae
Lemma 4.1 (Inclusion-Exclusion principle for equivalence
classes) Let A and Gbe nonempty finite sets. For any equivalence
class P(A) on G|A|, we have
()
f() =
1P:1(1)|A/||A/1|
AA/1
(|A/ | 1)!
(1)f(). (4.3)
Thus, for instance, ifA={1, 2, 3} and is the equality relation,
i.e. j k if and only ifj = k, this identity is saying that
1,2,3G:1,2,3 distinct
=
1,2,3G
1,2,3:1=2
1,2,3G:2=3
1,2,3G:3=1
+2
1,2,3G:1=2=3
where we have omitted the summands f(1, 2, 3) for brevity.
ProofBy passing from Ato the quotient space A/ if necessary we
may assume thatis the equality relation =. Now relabelingA as{1, .
. . , n},1 as, andA asA, it sufficesto show that
Gn:1,...,n distinct
f() =
P({1,...,n})
(1)n|{1,...,n}/| A{1,...,n}/
(|A| 1)!
()f(). (4.4)
We prove this by induction on n. Whenn= 1 both sides are equal
to
G f(). Nowsuppose inductively thatn >1 and the claim has
already been proven for n1. We observethat the left-hand side of
(4.4) can be rewritten as
Gn1:1,...,n1 distinct
nG
f(, n)
n1
j=1
f(, j) ,where := (1, . . . , n1). Applying the inductive
hypothesis, this can be written as
P({1,...,n1})(1)n1|{1,...,n1}/|
A{1,...,n1}/
(|A| 1)!
()
nG
f(, n)
1jnf(, j)
. (4.5)
25
-
8/10/2019 Exact Recovery
26/41
Now we work on the right-hand side of (4.4). If is an
equivalence class on{1, . . . , n},let be the restriction of to{1,
. . . , n 1}. Observe that can be formed fromeither by adjoining
the singleton set{n}as a new equivalence class (in which case we
write= {, {n}}, or by choosing aj {1, . . . , n 1}and declaringn to
be equivalent to j (inwhich case we write= {, {n}}/(j =n)). Note
that the latter construction can recover
the same equivalence class in multiple ways if the equivalence
class [j]
ofj in hassize larger than 1, however we can resolve this by
weighting each j by 1|[j] | . Thus we havethe identity
P({1,...,n})
F() =
P({1,...,n1})F({, {n}})
+
P({1,...,n1})
n1j=1
1
|[j]|F({, {n}}/(j=n))
for any complex-valued function F onP({1, . . . , n}). Applying
this to the right-hand sideof (4.4), we see that we may rewrite
this expression as the sum of
P({1,...,n1})
(1)n(|{1,...,n1}/|+1) A{1,...,n1}/
(|A| 1)!
()f(, n)
and P({1,...,n1})
(1)n|{1,...,n1}/|n1j=1
T(j)
()f(, j),
where we adopt the convention = (1, . . . , n1). But observe
that
T(j) :=
1
|[j] | A{1,...,n}/({,{n}}/(j=n))(|A| 1)! = A{1,...,n1}/(|A|
1)!and thus the right-hand side of (4.4) matches (4.5) as
desired.
4.3 Stirling Numbers
As emphasized earlier, our goal is to use our
inclusion-exclusion formula to rewrite the sum(4.2) as a sum over
(). In order to do this, it is best to introduce another element
ofcombinatorics, which will prove to be very useful.
For anyn, k 0, we define theStirling number of the second
kindS(n, k) to be the numberof equivalence relations on a set of n
elements which have exactly k equivalence classes,thus
S(n, k) := # {P(A) : |A/ | =k}.Thus for instance S(0, 0) = S(1,
1) = S(2, 1) = S(2, 2) = 1, S(3, 2) = 3, and so forth. Weobserve
the basic recurrence
S(n + 1, k) =S(n, k 1) + kS(n, k) for all k , n 0. (4.6)
26
-
8/10/2019 Exact Recovery
27/41
This simply reflects the fact that ifa is an element ofA and is
an equivalence relationon A with k equivalence classes, then either
a is not equivalent to any other element ofA(in which case has k 1
equivalence classes on A\{a}), or a is equivalent to one of thek
equivalence classes ofA\{a}.We now need an identity for the
Stirling numbers1.
Lemma 4.2 For anyn 1 and0
-
8/10/2019 Exact Recovery
28/41
Proof Elementary calculus shows that for x >0, the function
g(x) = xxn1
(1)x is increasingfor x < x and decreasing for x > x,
where x := (n 1)/ log 1 . If 1 e1n, thenx 1, and so the alternating
series Fn() =
k=1(1)n+kg(k) has magnitude at most
g(1) = 1. Otherwise the series has magnitude at most
g(x) = exp((n 1)(log(n 1) log log1 1))and the claim follows.
Roughly speaking, this means that Fn() behaves like for n =
O(log[1/]) and behaveslike (n/ log[1/])n for n log[1/]. In the
sequel, it will be convenient to express thisbound as
Fn() G(n),where
G(n) = 1, log
1 1 n,
exp((n 1)(log(n 1) log log1 1)), log 1 >1 n.(4.9)
Note that we voluntarily exchanged the function arguments to
reflect the idea that we shallviewGas a function ofnwhile will
serve as a parameter.
4.4 A Second Formula for the Expected Value of the Trace
ofH2n0
Let us return to (4.2). The inner sum of (4.2) can be rewritten
as
P(A)|A/|
()f()
with f() :=e2iN
P1j2nj(tjtj+1). We prove the following useful identity:
Lemma 4.4
P(A)
|A/|()
f() =
1P(A)
(1)
f()
AA/1
F|A|(). (4.10)
Proof Applying (4.3) and rearranging, we may rewrite this as
1P(A) T(1)
(1) f(
),
whereT(1) =
P(A):1
|A/|(1)|A/||A/1| AA/1
(|A/ | 1)!.
Splitting A into equivalence classes A ofA/ 1, we observe
that
T(1) =
AA/1
P(A)
|A/|(1)|A/||A|(|A/ | 1)!;
28
-
8/10/2019 Exact Recovery
29/41
splitting based on the number of equivalence classes|A/ |, we
can write this as
AA/1
|A|k=1
S(|A|, k)k(1)|A|k(k 1)! =
AA/1F|A|()
by (4.8). Gathering all this together, we have proven the
identity (4.10).
We specialize (4.10) to the function f() := exp(i
1j2n j(tj tj+1)) and obtain
E[Tr(H2n0 )] =
P(A)
t1,...,t2nT: tj=tj+1
()
e2iN
P2nj=1j(tjtj+1)
AA/
F|A|().
(4.11)We now compute
I() =
()e2iN
P1j2nj(tjtj+1).
For every equivalence classA
A/
, lettAdenote the expressiont
A :=
aA(ta
ta+1),
and let A denote the expression A := a for any a A (these are
all equal since ()). Then
I() =
(A)AA/Z|A/|N
e2iN
PAA/ AtA =
AA/
AZN
e2iN AtA .
We now see the importance of (4.11) as the inner sum equals|ZN|=
N when tA = 0 andvanishes otherwise. Hence, we proved the
following:
Lemma 4.5 For every equivalence classA A/ , lettA := aA(ta
ta+1). Then
E[Tr(H2n0 )] =
P(A)
tT2n: tj=tj+1 andtA=0 for allA
N|A/|AA/
F|A|(). (4.12)
This formula will serve as a basis for all of our estimates. In
particular, because of theconstraint tj= tj+1, we see that the
summand vanishes if A/ contains any singletonequivalence classes.
This means, in passing, that the only equivalence classes which
con-tribute to the sum obey|A/ | n.
4.5 Proof of Theorem 3.3
Let be an equivalence which does not contain any singleton. Then
the following inequalityholds
#{t T2n : tA = 0 for all A A/ } |T|2n|A/|+1.To see why this is
true, observe that as linear combinations of t1, . . . , t2n, the
expressionstjtj+1are all linearly independent of each other except
for the constraint
2nj=1 tjtj+1=
0. Thus we have|A/ | 1 independent constraints in the above sum,
and so the numberofts obeying the constraints is bounded
by|T|2n|A/|+1.
29
-
8/10/2019 Exact Recovery
30/41
It then follows from (4.12) and from the bound on the individual
terms F|A|() (4.9) that
E(Tr(H2n0 )) nk=1
Nk|T|2nk+1 P(A,k)
AA/
G(|A|), (4.13)
whereP(A, k) denotes all the equivalence relations on A with k
equivalence classes andwith no singletons. In other words, the
expected value of the trace obeys
E(Tr(H2n0 )) nk=1
Nk|T|2nk+1Q(n, k),
whereQ(n, k) :=
P(A,k)
AA/
G(|A|). (4.14)
The idea is to estimate the quantityQ(n, k) by obtaining a
recursive inequality. Before wedo this, however, observe that for
1/(1 + e),
G(n + 1) nG(n)
for all n 1. To see this, we use the fact that log Gis convex
and hence
log G(n + 1) log G(n) + ddn
log G(n + 1).
The claim follows by a routine computation which shows that
ddnlog G(n+ 1) log nwhenever log log 1 0.We now claim the recursive
inequality
Q(n, k) (n 1)Q(n 1, k) + (n 1)G(2)Q(n 2, k 1), (4.15)which is
valid for all n 2, k 1. To see why this holds, suppose that is an
elementofA and is inP(n, k). Then either (1) belongs to an
equivalence class that has onlyone other element ofA (for which
there are n 1 choices), and on taking that class outone obtains the
(n 1)G(2)Q(n 2, k 1) term, or (2) belongs to an equivalence
classwith more than two elements, thus removing from A gives rise
to an equivalence classinP(A\{}, k). To control this contribution,
let be an element ofP(A\{}, k) andlet A1, . . . , Ak be the
corresponding equivalence classes. The element is attached to oneof
the classes Ai, and causes G(|Ai|) to increase by at most|Ai|.
Therefore, this termscontribution is less than
P(A\{},k)
ki=1
|Ai|
AA/G(|A|).
But clearlyk
i=1 |Ai| =n 1, and so this expression simplifies to (n 1)Q(n 1,
k).From the recursive inequality, one obtains from induction
that
Q(n, k) G(2)k(2n)nk. (4.16)
30
-
8/10/2019 Exact Recovery
31/41
The claim is indeed valid for allQ(1, k)s andQ(2, k)s. Then if
one assumes that the claimis established for all pairs (m, k) with
m < n, the inequality (4.15) shows the property form= n. We omit
the details.
The bound (4.16) then automatically yields a bound on the
trace,
E(Tr(H2n0 )) nk=1
Nk|T|2nk+1G(2)k(4n)2nk.
With = N G(2)/(4n|T|), the right-hand side can be rewritten
as|T|2n+1(4n)2nk andsince
k n max(, n), we established that
E(Tr(H2n0 ) n
Nn|T|n+1G(2)n(4n)n, n NG(2)4|T| ,N|T|2nG(2)(4n)2n1 otherwise.
(4.17)
We recall that G(2) = /(1) and thus, (4.17) is nearly the
content of Theorem 3.3except for the loss of the factor en in the
case where n is not too large.
To recover this additional factor, we begin by observing that
(4.15) gives
Q(2k, k) (2k 1)G(2)Q(2(k 1), k 1)since Q(n, k) = 0 for n <
2k. It follows that
Q(2k, k) (2k 1)(2k 3) . . . 3 G(2)k = (2k 1)!2k1(k 1)!G(2)
k,
and a simple induction shows that
Q(n, k) (n 1)(n 2) . . . 2k 2nk Q(2k, k) =(n 1)!(k
1)!
2n2k+1 G(2)k, (4.18)
which is slightly better than (4.16). In short,
E(Tr(H2n0 )) nk=1
B(2n, k), B(2n, k) :=(2n 1)!
(k 1)! Nk|T|2nk+1 22n2k+1G(2)k.
One computesB(2n, k)
B(2n, k 1)= NG(2)
4|T|(k 1)and, therefore, for a fixed n obeying nN G(2)/[4|T|],
B(2n, k) is nondecreasing with k.Whence,
E(Tr(H2n0 )) nB(2n, n) =n 2n!n! G(2)n|T|n+1Nn. (4.19)The ration
(2n)!/n! can be simplified using the classical Stirling
approximation:
2 nn+1/2 en+1/(12n+1) < n!