Embed Size (px)
Citation preview

Eventual Periodicity in the Two-Sector RSL Model:
Equilibrium vis-a-vis Optimum Growth∗
Liuchun Deng,† Minako Fujio,‡ and M. Ali Khan§
August 13, 2020
Abstract: This paper investigates the well-known phenomenon of eventual periodicity ofLi-Yorke chaos in the context of the two-sector Robinson-Shinkai-Leontief (RSL) modelof economic growth. It locates its (i) presence under specific parameter restrictionsthat include the extreme classical saving specification, and its (ii) absence in savingsgenerated by the optimization of an infinitely-lived representative agent with perfectforesight. These results in which rare events, chaos and stability are all brought togetherunder the rubric of upward and downward inertia, while of substantive economic interestof their own, also highlight phenomena in economic dynamics that may go towards aclearer definitional understanding of chaotic systems. (103 words)
Journal of Economic Literature Classification Numbers: C60, D90, O21.
Key Words: Two-sector model, equilibrium growth, optimum growth, eventual period-icity, chaos
Running Title: Eventual Periodicity and Rare Events
∗This paper is dedicated to the memory of T. N. Srinivasan, a pioneer of two-sector growth theory, apast editor of Econometrica, and also a mentor and role-model to so many others going well beyond theauthors of this modest contribution, modest especially when keeping TN’s high standards in mind. Partof the results reported in this essay have been presented at the 26th Annual Symposium of the Societyfor Nonlinear Dynamics and Econometrics in Keio University on March 19, 2018. The authors gratefullyacknowledge stimulating conversation and exchanges with Bob Barbera, Jess Benhabib, Chris Carroll,Edmund Crawley, Tapan Mitra, Kazuo Nishimura, and Kevin Reffett, and finally, the encouragement ofthe Associate Editor of this journal and the careful reading of his/her two anonymous referees. LiuchunDeng acknowledges the support of the Start-up Grant from Yale-NUS College.†Division of Social Sciences, Yale-NUS College, Singapore.‡Department of Economics, Yokohama National University, Japan§Department of Economics, The Johns Hopkins University, Baltimore, MD 21218.

Contents
1 Introduction 2
2 The Two-Sector RSL Model of Equilibrium Growth 4
3 The Temporary Equilibrium and the Resulting Dynamics 6
4 On Eventual Periodicity in Equilibrium Growth 9
5 On Eventual Periodicity in Optimum Growth 14
6 Concluding Remarks 15
7 Appendix 16
7.1 Detailed Proofs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
7.2 Illustration of the Equilibrium Dynamics when aC = aI . . . . . . . . . . 23
7.3 The Equilibrium Dynamics for the RSS Model . . . . . . . . . . . . . . . 24
7.4 Illustration of the Equilibrium Dynamics when (1− d)p−1θ = 1 . . . . . . 24
1

But this long run is a misleading guide to current affairs. In the long run we areall dead. Economists set themselves too easy, too useless a task if in tempestuousseasons they can only tell us that when the storm is long past the ocean is flatagain.1 Keynes (1923)
1 Introduction
Since Li-Yorke’s discovery that period-three implies chaos, it has been long known thatthe specific formulation of chaos that they defined and studied could be unobservable;and thus, a chaotic map may possibly lead to as smooth and as non-erratic a dynamic asone might imagine; see Li and Yorke (1975). In the ensuing discussion, Nathanson (1977)constructed a piecewise-linear and Li-Yorke chaotic map on an interval to itself that didlead to eventual periodicity of any order; that is, to trajectories that converge in finiteperiods to a period-p cycle, p > 2 a given integer, starting from almost any initial point.2
This striking result shows that the Li-Yorke chaos could not only be non-observable butalso extremely well-behaved. The question is whether the result is of any consequencefor models in economic dynamics and goes beyond dynamical systems based on the unitinterval.
In this paper, we exploit the recent extension of Nathanson’s construction dueto Khan and Rajan (2017) to elaborate the concept of eventual periodicity in the two-sector Robinson-Shinkai-Leontief (RSL) model of economic growth.3 This, our primarycontribution, is to present an economic model that exhibits such a seemingly paradox-ical feature of the dynamics, and thereby provides a clearer definitional understandingof chaos. Perhaps somewhat more surprisingly, being a benchmark model with lineartechnology, the equilibrium dynamics of the RSL model has never been satisfactorilyestablished.4 This charting is perhaps the second contribution of this paper. In search ofeventual periodicity, we provide a comprehensive characterization, one that goes substan-
1Keynes (1923, p. 80); also in Keynes’ Collected Works Volume IV, p. 65. Mann (2017, p. 51) usesthese three sentences as the epigraph to his book, and reads them as a “remarkably faithful echo ofHegel, who in the 1820s told his students that no one should trust a principle according to which ‘thingswill adjust, they will take care of themselves.’ ” Also see the epigraphs and Chapter 9 of Carter (2020).As we shall see in Section 6 below, these epigraphs serve as the leitmotif for this entire essay.
2Notice that it is this convergence in finite periods that distinguishes eventual periodicity fromasymptotic periodicity.
3The model of equilibrium growth in its original form dates back to Joan Robinson’s 1956 book onThe Accumulation of Capital; see Deng, Fujio, and Khan (2019) for a textual justification of the RSLappellation. For a more recent variant in the equilibrium growth setting, see Tobin (1989).
4The RSL model of equilibrium growth has been studied, following Shinkai (1960), by Uzawa (1961),Uzawa (1963), Takayama (1963), Inada (1963), Inada (1964), and Amano (1964) among others. Thetextbook treatments of Burmeister and Dobell (1970) and Dixit (1976) remain fresh and up-to-date.The RSL model of optimal growth has been extensively studied in various special cases in Nishimuraand Yano (1995, 1996), Khan and Mitra (2006), Fujio (2005, 2006, 2008, 2009) and Fujio and Khan(2006).
2

tially beyond the existing work that predominantly focuses on the steady-state analysis,5
and thereby connects to Keynes’ well-known statement being used as the epigraph tothis work. In presenting a growth model almost all of whose equilibrium trajectoriesexhibit eventual periodicity but are nevertheless chaotic, highlight possibilities that areseparately well-understood but have never been brought together in the same model.6 Itis satisfying that this can be done in the canonical RSL model, a workhorse in economicdynamics.
Interestingly, for eventual periodicity to arise in equilibrium growth, we demon-strate that the economy almost surely does not diversify its production in the long run.Once the economy enters a period-p cycle, it accumulates capital stock by fully specializ-ing in investment good production for (p−1) periods and then decumulates capital stockby fully specializing in consumption good production for one period alone. By carefullypicking the depreciation rate, one-period capital decumulation will bring the economyback to the initial capital stock, thus leading to a period-p cycle.
Beyond equilibrium growth, we carry our inquiry further to study the RSL modelof optimum growth. In particular, we demonstrate that the building block of eventualperiodicity in the form of the Nathanson-Khan-Rajan (henceforth, NKR) construction,a Z-shaped map in the trapping square, is not optimal for any discount factor. Ourresults shed new light on the sources of chaotic dynamics and, more importantly, theirinterplay. As identified and synthesized in Mitra, Nishimura, and Sorger (2006), for chaosto arise from a policy function, economic models need to incorporate either upward ordownward inertia. Upward inertia refers to the assumption that the state variable of aneconomy cannot jump upwards instantaneously,7 while downward inertia refers to thestate variable not being able to jump downwards instantaneously.8 Our construction ofeventual periodicity hinges on the marriage of the two types of inertia. The phenomenonof upward inertia meeting downward inertia in the trapping square leads to a uniqueZ-shaped map obtained through the Keynesian-type savings behavior and is precludedwhen inter-temporal arbitrage conditions are explicitly brought into play. This resultstands in sharp contrast to the aforementioned cases that only one type of inertia isactivated – both the check and the tent map can be sustained as optimal under certaindiscount factor, as in Nishimura and Yano (1995) and Khan and Mitra (2012), but the
5See in particular Tobin (1989) and the subsequent discussion by Steedman (1990).6See Sorger (1994) and Khan and Piazza (2011) for periodicity; Benhabib and Day (1982), Day and
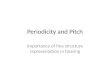
Shaffer (1985), and Nishimura and Yano (1994) for chaotic dynamics.7For example, accumulation of capital stock requires investment and therefore takes time. See the
highlighted left arm in Figure 1 which plots the capital stock in the next period against the capital stockin the current period. As in Nishimura and Yano (1995), the policy function is a tent map, consistingof an upward-sloping arm that is precisely driven by upward inertia and a downward-sloping arm in theinterior of the transition possibility set. Similar construction, albeit in an equilibrium growth framework,can be found in Matsuyama (1999).
8For example, investment goods are durable with a depreciation rate strictly below one. See thehighlighted right arm in Figure 1. As in Khan and Mitra (2005), due to this assumption, the right armof their check-map is upward sloping, which gives rise to topological chaos.
3

Figure 1: Eventual Periodicity for p = 3
Z-shaped map, as a combination of the two, cannot be so sustained.We present the setup of the RSL model of equilibrium growth in the next section.
We characterize the equilibrium growth in Section 3 and discuss the emergence of even-tual periodicity in Sections 4. We then show that the Z-shaped map is not optimal inan optimum growth setting in Section 5. We offer concluding remarks in Section 6. Allthe detailed proofs are provided in Section 7.
2 The Two-Sector RSL Model of Equilibrium Growth
We consider a two-sector economy. The production technology employs the same Leontieftechnological specification as in Nishimura and Yano (1995, 1996) and Fujio (2008, 2009).There are two production sectors. One unit of consumption good is produced by oneunit of labor and aC > 0 units of capital; b > 0 units of investment goods are producedby one unit of labor and aI > 0 units of capital.
Denote by yC the output of consumption goods and by yI the output of invest-ment goods. According to the technological specification, we have the following resourceconstraints for each period:
yC + yI/b ≤ 1 (1)
aCyC + aIyI/b ≤ x, (2)
4

where the total labor is assumed to be unity and stay constant over time; the totalcapital stock is given by x.9
The product markets for consumption and investment goods are assumed to beperfectly competitive. Under the Leontief production technology, perfect competitionimplies that
pC ≤ w + aCr (3)
pI ≤ w/b+ aIr/b, (4)
where pC is the price of consumption goods; pI is the price of investment goods; w isthe wage rate; r is the rental rate. We normalize pC to be unity.10 The inequality forpC holds strictly only if yC = 0 and the inequality for pI holds strictly only if yI = 0.Moreover, w = 0 if there is unemployment of labor, i.e., yC + yI/b < 1; r = 0 when thereis excess supply of capital, i.e., aCyC + aIyI/b < x. We rewrite the conditions above in acompact form
(yC + yI/b− 1)w = 0 (5)
(aCyC + aIyI/b− x)r = 0 (6)
(pC − w − aCr)yC = 0 (7)
(pI − w/b− aIr/b)yI = 0. (8)
Denote the savings rate of the capital income by sI and the savings rate of laborincome by sC .
11 Market clearing conditions yield
pCyC = (1− sC)w + (1− sI)rx (9)
pIyI = sCw + sIrx. (10)
Our setting encompasses several benchmark specifications in the literature of eco-nomic growth as special cases. For example, under “extreme classical saving” specifica-tion as in Hahn and Matthews (1964), capitalists save all their income by only purchasinginvestment goods and laborers use all their income for consumption goods, or equiva-lently, sI = 1 and sC = 0. Under the standard Keynesian setting, a constant fraction ofthe aggregate income is saved, which coincides with the case sC = sI .
Conditions (1) – (10) characterize a temporary equilibrium for each period.The dynamics of the model is generated by capital accumulation. Capital cannot
be consumed and depreciates at the rate d ∈ (0, 1). The amount of capital available
9Notice that x, yC , and yI may change over time, but for simplicity, we drop the time subscript whenpresenting the cross-sectional setting of the model.
10This precludes the possibility of pC = 0, which rules out the case with all factor and product pricesbeing zero.
11For similar savings specifications, see chapter 6 of Dixit (1976).
5

at the beginning of next period x′ is equal to the sum of the current production ofinvestment goods and the left-over capital after depreciation:
x′ = (1− d)x+ yI .
We further define a key parameter
ζ ≡ b/(aC − aI)− (1− d) (11)
which features prominently in the analysis of the two-sector RSL model of optimumgrowth as in Deng, Fujio, and Khan (2019). ζ can be interpreted as the marginal rate oftransformation of capital between the present and the next period under full utilizationof resources.
3 The Temporary Equilibrium and the Resulting Dynamics
We first define two cutoff capital stocks
xL =aIaC
sIaC + (1− sI)aI(12)
xK = sCaI + (1− sC)aC . (13)
By construction, we have minaC , aI ≤ xi ≤ maxaC , aI for i = L,K. We now demon-strate that xL and xK serve as important benchmarks to delineate the temporary equi-librium of the model.
Lemma 1. For x < xL, there exists a temporary equilibrium such that there is excesslabor: yC + yI/b < 1. For x ≥ xL, if there exists a temporary equilibrium, then labor isfully employed in the equilibrium: yC + yI/b = 1.
Lemma 2. For x > xK, there exists a temporary equilibrium such that there is excesscapital: aCyC + aIyI/b < x. For x ≤ xK, if there exists a temporary equilibrium, thencapital is fully utilized in the equilibrium: aCyC + aIyI/b = x.
The first two lemmas formally establish two very intuitive ideas: the labor con-straint of the economy is binding if and only if labor is sufficiently scarce, while thecapital constraint of the economy is binding if and only if capital is sufficiently scarce.Our next lemma shows that full utilization of resources is possible in the equilibrium ifand only if the capital-labor ratio is at some intermediate range.
Lemma 3. There exists a temporary equilibrium such that both capital and labor arefully utilized if and only if the capital stock x is in [minxL, xK,maxxL, xK].
6

To ease the exposition of the main equilibrium characterization result and oursubsequent analysis of the dynamics, we define
θ ≡ sIb
aI+ 1− d.
Proposition 1. If xL > xK, the equilibrium law of motion of capital is given by
g(x) =
θx for x ∈ (0, xK)θx, aCb
aC−aI− ζx, (1− d)x+ sCb
for x ∈ [xK , xL]
(1− d)x+ sCb for x ∈ (xL,∞).
(14)
If xL ≤ xK and aC 6= aI , the equilibrium law of motion of capital is given by
g(x) =
θx for x ∈ (0, xL)
aCbaC−aI
− ζx for x ∈ [xL, xK ]
(1− d)x+ sCb for x ∈ (xK ,∞).
(15)
If xL ≤ xK and aC = aI , the equilibrium law of motion of capital is given by
g(x) =
θx for x ∈ (0, aI)
[(1− d)aI + minsI , sCb, (1− d)aI + maxsI , sCb] for x = aI
(1− d)x+ sCb for x ∈ (aI ,∞).
(16)
The characterization result can be best seen from Figure 2 which in each panel theequilibrium growth path is highlighted within the transition possibility set. We illustratethe equilibrium dynamics for two cases: i) aC > aI and ii) aC < aI . We include Figure7 in the Appendix to illustrate a special case of aC = aI which resembles a one-sectormodel. Focusing on the top panel of the consumption good sector being capital intensive(aC > aI) from which our eventual periodicity result will arise, each map consists ofgenerically three arms, capturing the cases of excess labor, full utilization of resources,and excess capital. When xL < xK , the temporary equilibrium is always unique, andthus the equilibrium dynamics is represented by a function as in Equation 15. WhenxL > xK , due to multiple equilibria, the equilibrium law of motion of capital becomesa correspondence and the three arms occur simultaneously for the interval (xK , xL) assuggested by Equation 14. Furthermore, as in Equations 14 – 16, an increase in sI shiftsthe left arm upwards while an increase in sC shift the right arm upwards.
7

Figure 2: Characterization of Equilibrium Dynamics
8

Being a complete characterization of the equilibrium growth, this result applies tothe consumption good sector being either capital intensive (aC > aI) or labor intensive(aC < aI). The latter has been considered in Burmeister and Dobell (1970), albeit in acontinuous-time setting.12 When aC < aI , ζ < −1, the existence of multiple equilibria,which may give rise to non-convergent paths, echoes their earlier discussion. With thesame cross-sectional specification, Corden (1966) studies the dynamics of the model in acontinuous-time setting without depreciation. Full utilization of labor and capital is thecentral focus of that paper. In contrast, our results have shown that it is essential to movebeyond the case of full utilization for a better understanding of the global dynamics ofthe model. Moreover, consider the Keynesian savings specification, sI = sC . Accordingto our definitions, if sI = sC , then xK ≥ xL, with equality if and only if aC = aI . Then,the proposition suggests that the Keynesian saving always leads to a unique temporaryequilibrium.
Before turning to analyzing the dynamics of the model, we define the followingmap, H : IR+ → IR+, by:
H(x) =
(b/aI + 1− d)x for x ∈ (0, aI)aCb/(aC − aI)− ζx for x ∈ [aI , aC ](1− d)x for x ∈ (aC ,∞).
(17)
We refer to H the“Z-map” as its graph is shaped like the alphabet Z. The map has twokinks: one is its top point where x is equal to aI and the other is its bottom point wherex is equal to aC . The three arms of the Z-map have simple economic interpretations: theleft arm stands for full specialization in the sector of investment goods; the right armstands for full specialization in the sector of consumption goods; the middle arm standsfor full utilization of labor and capital. In the analysis of the optimal dynamics of theRSL model as in Fujio (2009), the Z-map stands for the period-by-period zero value lossline, which plays an important role in determining the optimal policy.
Corollary 1. Consider the extreme classical saving specification: sC = 0 and sI = 1.Let aC > aI . Then the equilibrium dynamics of the model is represented by the map H.
4 On Eventual Periodicity in Equilibrium Growth
In this section, we provide sufficient conditions, which nest the extreme classical savingspecification and the associated Z-map as a special case, for the equilibrium dynamicsof the model to exhibit “well-behaved” chaos, a seemingly paradoxical phenomenon firstidentified by Nathanson (1977) and recently extended by Khan and Rajan (2017).
We first show that under certain parameter restrictions, the equilibrium dynamicsof the model is represented by a Z-shaped map. We then follow the NKR construction
12See pp. 149-151 in chapter 5 of their book. They impose the extreme classical saving assumption.
9

to show that for any integer p > 2, we can always construct a two-sector model ofequilibrium growth such that the equilibrium dynamics converges to a p-period cyclefrom almost everywhere.
Lemma 4. Let I ≡ [(1 − d)xK + sCb, θxL]. For any x ∈ IR+, there is t′ ∈ N such thatgt(x) ∈ I for all t > t′, if all of the following conditions are satisfied: (i) xL < xK; (ii)θxL > xK; (iii) (1− d)xK + sCb < xL. Moreover, the graph of g in I × I is Z-shaped.
Remark 1. If (i), (ii), and (iii) are satisfied, then
ζ =g(xL)− g(xK)
xK − xL=
(sIb/aI + 1− d)xL − (1− d)xK − sCbxK − xL
> 1.
Theorem 1. Let p > 2 be an integer. Let sC = 0 and sI > 0. There exists a quadruple(aC , aI , b, d) such that for almost every real number x ∈ IR+, there corresponds a positiveinteger nx such that gnx(x) is a point of period p for g.
To see the significance of this result, we consider p = 3 with an extreme classicalsaving specification, sI = 1 and sC = 0. According to this special case of the theorem,we can construct an economy in which the equilibrium dynamics converge from almosteverywhere to a three-period cycle: this is plotted in Figure 1. It is well known thatLi-Yorke chaos could be unobservable, but what our result adds further is that the chaosin this constructed economy is not only unobservable but also as well-behaved as onecan dream of – it is eventually periodic from almost everywhere!
There are two crucial steps in our construction. First, we pick sI , aI , aC , and bsuch that all the three conditions in Lemma 4 are satisfied and thus the graph of g isZ-shaped in the trapping square. In particular, to ensure that θxL > xK , the savingsrate of capital income sI needs to be sufficiently high.13 Second, we pick d such that(1− d) = θ1−p, which implies that (1− d) decreases with p, or equivalently, d increaseswith p: A higher period p is accompanied with higher depreciation rate.
The intuition behind this result can be better seen from Figure 3 and 4. Consideran initial stock x0 in the MM’ region, [xK , θxL]. We know g(x0) = (1 − d)x0. Further,given the parameter restrictions in our construction, we know g(x0), g
2(x0), ..., gp−1(x0)are all in the M ′′V region, and given (1− d) = θ1−p, gp(x0) = (1− d)θp−1x0 = x0. Sincex0 is arbitrarily chosen from the MM’ region, any point in [xK , θxL] is a periodic pointof period-p. By construction, the absolute value of slope of the middle arm VM, ζ, isgreater than one, so the fixed point is not stable. Since the economy tends to divergefrom the middle arm, as shown by Khan and Rajan (2017), if the economy starts fromthe middle arm VM, it will almost surely visit the right arm in finite periods, thus leadingto the convergence to a period-p cycle. Last, if the economy starts from the left arm, it
13In our proof, to simplify our construction, we require sI >aC
b , but an inspection of our argument
suggests that it suffices to have sI >aC−(1−d)aI
b , or equivalently θaI > aC .
10

will always visit either the middle or the right arm, again leading to the convergence toa period-p cycle.
Figure 3: Eventual Periodicity for p = 4 (θ = 2, d = 7/8)
Figure 4: Eventual Periodicity for p = 5 (θ = 2, d = 15/16)
Moreover, evidently in 3 and 4, once the economy enters a period-p cycle, it al-ternates between two specialization regimes. The economy accumulates capital stock by
11

fully specializing in producing investment goods for (p−1) periods and then decumulatescapital stock by only producing consumption goods for one period. Strong depreciationrequires more periods of capital accumulation, resulting in the aforementioned positiverelationship between d and p. Almost surely, the resource is not fully utilized in thelong run. Borrowing the terminology from Mitra, Nishimura, and Sorger (2006), thetwo specialization regimes stand for two main sources of chaos: the OV line along whichthe economy specializes in investment good production corresponds to upward inertia,impossibility of capital stock jumping from zero to a large amount (aI > 0), and the ODline along which the economy specializes in consumption good production correspondsto downward inertia, impossibility of capital stock dropping immediately from a largeamount to zero (d < 1). The existing work has shown that each of these two types ofinertia, combined with the policy function being decreasing for the interior part of thetransition possibility set, could give rise to chaos. Our construction shows how chaoscould emerge in the form of eventual periodicity when the two types of inertia meet eachother in the trapping square.
As a technical note, it should be pointed out that sC = 0 and sI > 0 are alsonecessary for the NKR construction. In their construction, the left and right arms of themap always intersect on the 45-degree line from the origin if extended backwards. Theassumption sC = 0 is crucial for guaranteeing this property for the map g. To see this,we calculate the intersection point of the left and right arms by solving
x′ = (sIb/aI + 1− d)x
x′ = (1− d)x+ sCb.
The intersection point is given by (x, x′) = (aIsC/sI , (1− d)aIsC/sI + sCb), which is onthe 45-degree line if and only if (a) sC = 0 or (b) sIb/aI + (1− d) = 1. If (b) is satisfied,then the left arm overlaps with the 45-degree line and hence, Condition (ii) and (iii) inLemma 4 cannot be jointly satisfied. Therefore, we must have (a) sC = 0 to guaranteethat if we extend the left and right arms backwards, they intersect on the 45-degree lineand therefore, the theorem in Khan and Rajan (2017) is applicable. Moreover, sI > 0 isalso necessary for the result because otherwise again Condition (ii) and (iii) in Lemma4 cannot be jointly satisfied. Figure 5 illustrates an example of a Z-shaped map thatsatisfies sC = 0 and sI > 0, while Figure 6 plots an example of a Z-shaped map in whichthe two downward-sloping arms do not intersect on the 45-degree line.
12

Figure 5: The Z-shaped Map: Example I
Figure 6: The Z-shaped Map: Example II
13

5 On Eventual Periodicity in Optimum Growth
In this section, we demonstrate that eventual periodicity that follows as a characteris-tic consequence of the NKR construction does not arise in the RSL model of optimumgrowth. In particular, we show that the Z-map H does not represent the optimal dy-namics if the necessary conditions for eventual periodicity as in Lemma 4 are satisfied.It should nevertheless be emphasized that our finding of the incompatibility of one con-struction of eventual periodicity with intertemporal optimization does not necessarilyimply the absence of eventual periodicity in general.
Since the Z-map can only arise from the RSL model of optimum growth withconsumption goods being capital intensive (aC > aI), we consider the same setup as inDeng, Fujio, and Khan (2019). The production specification and the law of motion ofcapital follows the RSL model of equilibrium growth. The transition possibility set isgiven by
Ω = (x, x′) ∈ IR+ × IR+ : x′ − (1− d)x ≥ 0, x′ − (1− d)x ≤ bmin1, x/aI,
where IR+ is the set of non-negative real numbers. The correspondence of consumptiongood production is defined as Λ : Ω −→ IR+ with
Λ(x, x′) = y ∈ IR+ : 0 ≤ y ≤ (1/aC)(x− (aI/b)(x′ − (1− d)x))
and 0 ≤ y ≤ 1− (1/b)(x′ − (1− d)x).
The felicity function, w : IR+ −→ IR, is defined as, w(y) = y, and the reduced formutility function, u : Ω −→ IR+, is defined as u(x, x′) = maxw(y) : y ∈ Λ(x, x′). Thediscount factor is denoted by ρ ∈ (0, 1). A program from x0 is a sequence xt, yt suchthat for all t ∈ N, (xt, xt+1) ∈ Ω and yt = max Λ(xt, xt+1). A program x∗t , y∗t from x0is said to be optimal if
∞∑t=0
ρt[u(xt, xt+1)− u(x∗t , x∗t+1)] ≤ 0
for every program xt, yt from x0. Denote the optimal policy correspondence by h.
Proposition 2. If ρaC(1 − d) < aI , then for any x ∈ (0, aC/(1 − d)) and x′ ∈ h(x),x′ ≤ aC.
Corollary 2. If aC(1− d) < aI , then the Z-map H is not optimal.
For the Z-map to be Z-shaped in the trapping square, we must have aC(1−d) < aI .However, the corollary suggests that precisely because of this necessary condition, theZ-map is no longer optimal. Therefore, intertemporal optimization precludes eventualperiodicity in the form of NKR construction. Proposition 2 is based on the characteri-zation of the optimal dynamics in Deng, Fujio, and Khan (2019), but its implication is
14

of substantive interest, and of somewhat decisive importance: In a model that marriesdownward inertia with upward inertia, a map that combines the tent and check-map, thetwo signature maps characterizing the optimal dynamics in the presence of only upwardor downward inertia, is no longer optimal.
6 Concluding Remarks
The results reported in this essay underscore a methodological turn in macroeconomicsand growth theory: a move from Ramsey to Keynes. As such, by reactivating a canon-ical model of equilibrium growth, our analysis has interest that goes beyond a narrowtechnical investigation to the broader issues of comparative and transition dynamics thatunderlie the notion of eventual periodicity investigated here.
Conventional economic theory rarely if ever faces this crucial question. An analyt-ical solution is obtained, and an equilibrium solved for a certain set of parametersand exogenous variables values. A change is posited, and a new equilibrium solu-tion calculated. The time taken between these equilibria is almost never consideredas an issue. A brilliant exception to this was published as early as 1969 by Atkin-son.14
It is the not whether Euler-Lagrange conditions are a prerequisite for the definition ofan equilibrium, but rather the difference between a good and bad equilibrium, and theadjustment to an equilibrium, that is the issue. And it is here that eventual periodicitymoves the literature forward by shifting convergence to finite time. But to be sure, forthe long run to be fully erased from the discussion, more needs to be done: (i) robustnessof the model, including possibly variable discount rates, (ii) the response of the finitetime to changing parameters and the investigation of Atkinson’s question as to how longis the long run.15
Circling back from Keynes to Ramsey, and moving to specifics, we then showthe absence of eventual periodicity in the form of the NKR construction in the RSLmodel of optimum growth. Could eventual periodicity arise in a different form? Tobe more specific, Deng, Fujio, and Khan (2019) offer a detailed characterization of theoptimal dynamics under the parameter restriction of ζ ≤ 1,16 which leads to globalconvergence to the steady state or two-period cycles. For ζ > 1, the optimal policy
14See Ormerod and Rosewell (2006, p. 134) referring to Atkinson (1969). For the recent surveys,see Hammond and Rodriguez-Clare (1993) and Turnovsky (2003); also see Dixit (1970). The authorscontinue “He showed, inter alia, that the typical time scale of transition from one equilibrium growthpath to another in the Solow model was over 100 years. But this article appears to have been exorcisedfrom student reading lists; its implication that economies, even in a strictly neo-classical world, spenda long time out of equilibrium presumably being too disturbing.”
15We are indebted to the valuable comments of an anonymous and critical referee.16ζ is the the marginal rate of transformation of capital goods today into capital goods tomorrow,
defined as ζ ≡ b/(aC − aI)− (1− d).
15

of the RSL model has not been fully characterized, but in the light of our result inSection 5, it is reasonable to conjecture that optimal dynamics is not eventually periodic.Moreover, in the setting of equilibrium growth, our eventual periodicity result hinges onthe condition θp−1(1 − d) = 1. What about the dual condition (1 − d)p−1θ = 1? In theAppendix, we offer an example that draws direct parallelism with Figure 1. Can theNKR construction be generalized in this alternative setting? We leave those questionsfor future investigation.
7 Appendix
7.1 Detailed Proofs
Proof of Lemma 1: To prove the first part, we consider
yC =(1− sI)x
aC, yI =
sIbx
aI, w = 0, r =
1
aC, pI =
aIbaC
.
It is easy to show that Conditions (1) – (10) are satisfied provided that x < xL. Inparticular, the resource constraint for labor is not binding, that is, yC + yI/b < 1.
To prove the second part, suppose on the contrary there exists an equilibriumsuch that yC + yI/b < 1 for x ≥ xL. Since yC + yI/b < 1, we must have w = 0. Sincew+ aCr ≥ pC = 1, r > 0, which implies that capital is fully utilized: aCyC + aIyI/b = x.To proceed, there are three cases: (i) sI ∈ (0, 1); (ii) sI = 0; (iii) sI = 1. Consider(i) sI ∈ (0, 1). Since r > 0, market clearing conditions for consumption and investmentgoods imply that pCyC > 0 and pIyI > 0, which further imply yC > 0 and yI > 0.Since yC > 0, pC = w + aCr = 1. Further, we know w = 0, so r = 1/aC . SinceyI > 0, pI = w/b + aIr/b with w = 0, suggesting pI = aI/(baC). Since we know w, r,and pI , the market clearing conditions for both goods imply that yC = (1 − sI)x/aCand yI = sIbx/aI . Consider case (ii): sI = 0. Since sI = 0, according to the marketclearing condition of the investment goods, pIyI = sCw + sIrx = 0. If pI = 0, thenpI < w/b + aIr/b, which implies yI = 0. Therefore, pIyI = 0 implies yI = 0. Since theresource constraint of capital is binding, yC = x/aC . For sI = 0, what we have obtainedcan be rewritten as yC = (1 − sI)x/aC and yI = sIbx/aI . Consider case (iii): sI = 1.Similarly, since sI = 1, according to the market clearing condition of the consumptiongoods, pCyC = (1 − sC)w + (1 − sI)rx = 0. Since pC = 1, we must have yC = 0. Sincethe resource constraint of capital is binding, yI = bx/aI . For sI = 1, we rewrite yC andyI as yC = (1 − sI)x/aC and yI = sIbx/aI . In sum, we have shown that for any sI ,yC = (1− sI)x/aC and yI = sIbx/aI . We then have
yC + yI/b =
(1− sIaC
+sIaI
)x =
x
xL≥ 1,
where the last inequality follows from x ≥ xL. This contradicts to the supposition thatyC + yI/b < 1. We have now obtained the desired conclusion.
16

Proof of Lemma 2: To prove the first part, we consider
yC = 1− sC , yI = bsC , w = 1, r = 0, pI = 1/b.
It is easy to show that Conditions (1) – (10) are satisfied provided that x > xK . Inparticular, the resource constraint for capital is not binding, that is, aCyC + aIyI/b < x.
To prove the second part, suppose on the contrary there exists an equilibriumsuch that aCyC + aIyI/b < x for x ≤ xK . Since aCyC + aIyI/b < x, we must haver = 0. Since w + aCr ≥ pC = 1, w > 0, which implies that there is full employmentof labor: yC + yI/b = 1. To proceed, there are three cases: (i) sC ∈ (0, 1); (ii) sC = 0;(iii) sC = 1. Consider (i) sC ∈ (0, 1). Since w > 0, the market clearing conditionsfor consumption and investment goods imply that yC > 0 and yI > 0. Since yC > 0,pC = w+aCr = 1. Further, we know r = 0, so w = pC = 1. Since yI > 0, pI = w/b+aIr/bwith r = 0, suggesting pI = 1/b. Since we know w, r, and pI , the market clearingconditions for both goods imply that yC = 1 − sC and yI = sCb. Consider case (ii):sC = 0. Since sC = 0, according to the market clearing condition of the investmentgoods, pIyI = sCw + sIrx = 0. If pI = 0, then pI < w/b + aIr/b, which implies yI = 0.Therefore, pIyI = 0 implies yI = 0. Since the resource constraint of labor is binding,yC = 1. For sC = 0, what we have obtained can be rewritten as yC = 1−sC and yI = sCb.Consider case (iii): sC = 1. Similarly, since sC = 1, according to the market clearingcondition of the consumption goods, pCyC = (1− sC)w + (1− sI)rx = 0. Since pC = 1,we must have yC = 0. Since the resource constraint of labor is binding, yI = b. ForsC = 1, we can rewrite yC and yI as yC = 1− sC and yI = sCb. In sum, we have shownthat for any sI , yC = 1− sC and yI = sCb. We then have
aCyC + aIyI/b = aC(1− sC) + aIsC = xK ≥ x,
which contradicts to the supposition that aCyC + aIyI/b < x. We have now obtained thedesired conclusion.
Proof of Lemma 3: We consider two cases separately: (i) aC 6= aI ; (ii) aC = aI .
Case (i): aC 6= aI . We first prove the “only if” part. Suppose on the contrary thereexists a temporary equilibrium such that both capital and labor are fully utilized withthe capital stock x /∈ [minxL, xK,maxxL, xK]. Solving yC and yI from the resourceconstraints, we have
yI =aC − xaC − aI
b, yC =x− aIaC − aI
. (18)
If x is not in [minaC , aI,maxaC , aI], then either yI or yC is strictly negative, whichleads to a contradiction. Hence, we must have x ∈ [minaC , aI,maxaC , aI]. Supposex = aI . Then yC = 0. Since yC = 0 and we know either w > 0 or r > 0 from pC ≤ w+aCr,the market clearing condition of the consumption goods implies that sC = 1 or sI = 1.However, if sC = 1, then xK = aI ; or if sI = 1, xL = aI . In either case, we have
17

x = aI ∈ [minxL, xK,maxxL, xK], which leads to a contradiction. Therefore, wemust have x 6= aI , or according to Equation (18), equivalently, yC > 0. Since yC > 0,we must have 1 = pC = w + aCr. Together with the market clearing condition of theconsumption goods, we obtain two linear equations for w and r
w + aCr = 1 (19)
(1− sC)w + (1− sI)xr =x− aIaC − aI
. (20)
Solving for w and r, we have
w =(aI(1− sI) + sIaC)(x− xL)
(aC − aI)((1− sC)aC − (1− sI)x)(21)
r =xK − x
(aC − aI)((1− sC)aC − (1− sI)x). (22)
If x > xK and x > xL, then w and r must take the opposite signs, contradicting to thefact that w ≥ 0 and r ≥ 0. Similarly, if x < xK and x < xL, then w and r must take theopposite signs, again contradicting to the fact that w ≥ 0 and r ≥ 0. Therefore, theredoes not exist a temporary equilibrium in which capital and labor are fully utilized forany x < minxL, xK or x > maxxL, xK.
We now turn to the “if” part. Consider x ∈ [minxL, xK,maxxL, xK]. DefineyC , yI , w, and r as in Equations (18), (21), and (22). Further, let pI = w/b + aIr/b.It is easy to show that Conditions (1) – (10) are satisfied. Since by construction,minaC , aI ≤ xi ≤ maxaC , aI for i = L,K, yI ≥ 0 and yC ≥ 0 for x ∈[minxL, xK,maxxL, xK]. To see that w and r are non-negative, notice that theyare the roots to the Equations (19) and (20). For the roots to the two linear equationsto be non-negative, it suffices to have(
(1− sI)x−x− aIaC − aI
aC
)((1− sC)− x− aI
aC − aI
)≤ 0,
or equivalently,
(xL − x)(xK − x)
(aC − aI)2(sIaC + (1− sI)aI)≤ 0⇔ (xL − x)(xK − x) ≤ 0,
which holds for x ∈ [minxL, xK,maxxL, xK]. Since w ≥ 0 and r ≥ 0, by construction,pI ≥ 0. Therefore, we have constructed a temporary equilibrium such that capital andlabor are fully utilized.
Case (ii): aC = aI . In this case, xL = xK = aC = aI . Then[minxL, xK,maxxL, xK] = aI. If x 6= aI , it is impossible to find yI and yC suchthat both resource constraints are satisfied. If x = aI , we can pick
yC = 1− sC , yI = bsC , w = 1, r = 0, pI = 1/b,
18

such that all the equilibrium conditions are satisfied. In this equilibrium, both capitaland labor are fully utilized.
Proof of Proposition 1: Consider two cases separately: (i) xL > xK and (ii) xL ≤ xK .
Case (i): xL > xK . Consider x < xK . Since x < xK and xK < xL, x < xL. From Lemma1, there exists a temporary equilibrium with excess labor. According to Lemma 2, theresource constraint of capital in a temporary equilibrium is always binding. Accordingto Lemma 3, there is no equilibrium in which both labor and capital are fully utilized.Therefore, for x < xK , we must have excess supply of labor: yC + yI/b < 1 and aCyC +aIyI/b = x. Following the proof of Lemma 1, we can show there exists a unique temporaryequilibrium with yI = sIbx/aI . Using the capital accumulation equation, we have x′ = θx.
Consider x > xL. Since x > xL and xL > xK , x > xK . From Lemma 2, thereexists a temporary equilibrium with excess capital. According to Lemma 1, the resourceconstraint of labor is always binding. According to Lemma 3, there is no equilibriumin which both labor and capital are fully utilized. Therefore, for x > xL, we must haveexcess supply of capital: yC + yI/b = 1 and aCyC + aIyI/b < x. Following the proof ofLemma 2, there exists a unique temporary equilibrium with yI = sCb. From the capitalaccumulation equation, we obtain x′ = (1− d)x+ sCb.
Consider x ∈ (xK , xL). According to Lemma 1, there exists a temporary equilib-rium such that there is excess labor. According to Lemma 2, there exists a temporaryequilibrium such that there is excess capital. According to Lemma 3, there exists atemporary equilibrium such that both capital and labor are fully utilized. Following theproofs of Lemmas 1, 2, and 3, yI can be sCb (excess capital), sIbx/aI (excess labor),or (aC − x)b/(aC − aI) (full utilization of resource). Using the capital accumulationequation, we obtain the desired conclusion.
Consider x = xK . According to Lemmas 1, 2, and 3, there exist only two types ofequilibria: excess labor or full utilization of both factors. However, since (aC−x)b/(aC−aI) = sCb for x = xK , the same expression of x′ for x ∈ (xK , xL) applies to the case ofx = xK .
Consider x = xL. According to Lemmas 1, 2, and 3, there exist only two typesof equilibria: excess capital or full utilization of both factors. However, since (aC −x)b/(aC − aI) = sIbx/aI for x = xL, the same expression of x′ for x ∈ (xK , xL) appliesto the case of x = xL.
Case (ii): xL ≤ xK . Consider x < xL. According to Lemma 1, there exists a temporaryequilibrium with excess labor supply. According to Lemma 2, there is always full utiliza-tion of capital in the equilibrium. According to Lemma 3, there is no equilibrium withfull utilization of resource. Hence, the equilibrium with excess labor supply is unique.Following the proof of Lemma 1, we can show yI = sIbx/aI . From the capital accumu-lation equation, we have x′ = (sIb/aI + 1 − d)x. Consider x > xK . From Lemmas 1, 2,and 3, there is a unique temporary equilibrium with excess capital stock, thus leadingto x′ = (1− d)x+ sCb.
19

Now consider x ∈ [xL, xK ]. We consider two subcases: (i) aC 6= aI ; (ii) aC = aI . For(i), according to Lemmas 1, 2, and 3, there exists a unique temporary equilibrium withfull utilization of resource in which yC and yI can be uniquely solved, thus leading to x′ =aCb/(aC−aI)−ζx. For (ii), according to Lemmas 1, 2, and 3, we know in any temporaryequilibrium there is full utilization of resources. Moreover, since aC = aI , we must haveaC = aI = xL = xK , which implies x = aI . It can be seen from the resource constraintsthat yC and yI cannot be uniquely determined in this case. However, we can show thatthere exists a continuum of equilibria such that yI ∈ [minsI , sCb,maxsI , sCb]. Tosee this, we adopt a similar proof strategy as in the proof of Lemma 3.
Since we know yC + yI/b = 1, yC can take value from [0, 1]. Suppose yC = 0, orequivalently, yI = b. The market clearing condition of the consumption goods suggeststhat sI = 1 or sC = 1. Therefore, we have yI = b = maxsI , sCb. Suppose yC > 0.Collecting the pricing and market clearing conditions of the consumption goods, weobtain
w + aCr = 1
(1− sC)w + (1− sI)xr = yC .
We can obtain non-negative roots (w and r) for this two-equation system if and only if
(1− sC − yC)((1− sI)x− aCyC) ≤ 0.
In other words, a temporary equilibrium exists if and only if the above inequality holds,which can be further simplified as
(1− sC − yC)(1− sI − yC) ≤ 0,
since we know x = aI = aC . The above inequality holds if and only if yC ∈ [1 −maxsI , sC, 1−minsI , sC]. Following from the resource constraint, this is equivalentto yI ∈ [minsI , sCb,maxsI , sCb]. Plugging yI into the capital accumulation equation,we obtain the desired conclusion.
Proof of Lemma 4: Since (i) xL < xK , (ii) θxL > xK , and (iii) (1− d)xK + sCb < xL,we have θxL > xK > xL > (1− d)xK + sCb. Thus, I is nonempty. Next, we pick x ∈ R+,and break up the proof into two steps: (1) x ∈ I and (2) x /∈ I.
Step (1): x ∈ I. Let’s write the interval I as I = I1 ∪ I2 ∪ I3 with I1 ≡ [(1 −d)xK + sCb, xL], I2 ≡ [xL, xK ], and I3 ≡ [xK , θxL]. Consider the first subinterval I1.From (i) and (ii) we have θxL > xK > xL and thus θ > 1, so g((1 − d)xK + sCb) >(1− d)xK + sCb. Further, since g(xL) = θxL and g is strictly increasing over I1, g(x) ∈ Ifor any x ∈ I1. Next, consider the second subinterval I2. We have g(xL) = θxL andg(xK) = (1−d)xK +sCb. Further, since g is strictly decreasing over I2, we have g(x) ∈ Ifor any x ∈ I2. Finally, consider the third subinterval [xK , θxL]. We have
θxL − g(θxL) = θxL − (1− d)θxL − sCb > θxL − (1− d)θxK − sCb= θ(xL − (1− d)xK)− sCb > θsCb− sCb = (θ − 1)sCb > 0
20

where the first inequality follows from (i), the second from (iii), and the third from θ > 1.We then obtain g(θxL) < θxL. Since we know g(xK) = (1− d)xK + sCb and g is strictlyincreasing over I3, g(x) ∈ I for any x ∈ I3.
Step (2): x /∈ I. For x ∈ (0, (1 − d)xK + sCb), pick t′ to be the smallest integer suchthat gt
′(x) = θt
′x ≥ (1 − d)xK + sCb. By construction, gt
′−1(x) < (1 − d)xK + sCb, sogt′(x) < θ((1− d)xK + sCb) < θxL, which implies that gt
′(x) ∈ I. Further, since we have
shown g(x′) ∈ I for any x′ ∈ I, gt(x) ∈ I for any t > t′. Similarly, for x ∈ (θxL,∞), pickt′ to be the smallest integer such that gt
′(x) ≤ θxL. By construction, gt
′−1(x) > θxL, sogt′(x) > (1 − d)θxL + sCb > (1 − d)xK + sCb, which implies that gt
′(x) ∈ I. Since we
have shown g(x′) ∈ I for any x′ ∈ I, gt(x) ∈ I for any t > t′.Notice that θxL > xK > xL > (1 − d)xK + sCb, so in I × I, the graph of g has
an upward-sloping arm and then a download-sloping middle arm followed by anotherupward-sloping arm, which resembles the character “Z”.
Proof of Theorem 1: Recall θ ≡ sIb/aI + (1− d). We first fix sI , aI , aC , and b suchthat sIb > aC > aI . Pick d such that
1− d = θ1−p, or equivalently, 1 = (1− d)(sIb/aI + (1− d))p−1 ≡ `(1− d).
Since p > 2, ` is strictly increasing on (0, 1). Further, since `(0) = 0 < 1 and `(1) =(1 + bsI
aI)p−1 > 1, there exists a unique d ∈ (0, 1) such that 1− d = θ1−p holds. Hence, d
is well-defined.Since sC = 0, xK = aC . Since sI > 0 and aI < aC , aI ≤ xL < aC . Then
we have xK > xL, which is Condition (i) in Lemma 4. Since sIb > aC = xK andxL ≥ aI , θxL ≥ θaI = sIb + (1− d)aI > xK , which is Condition (ii) in Lemma 4. Since1 − d = (sIb/aI + (1 − d))1−p and xK = aC , (1 − d)xK = θ1−paC < aC/θ < xL, wherethe first inequality follows from p > 2 and θ > 1, and the second inequality followsfrom θxL > xK = aC . Further, since sC = 0, we have xL > (1 − d)xK + sCb, which isCondition (iii) in Lemma 4. We know from the remark to Lemma 4, Conditions (i), (ii),and (iii) imply ζ > 1. From Lemma 4 and given sC = 0, we restrict our attention toI = [(1− d)xK , θxL].
To apply the main theorem in Khan and Rajan (2017), we now transform ourmap to a map defined on [0, 1].17 Consider a map f : [0, 1] → I, defined as f(x) =(xLθ − xK(1− d))x+ xK(1− d) for x in [0, 1]. Let gb ≡ f−1 g f. Then we have
gb(x) =
θx+ k for x ∈ [0, 1−k
θ]
−(k θ
p−1−1θ−1 −
1−kθ
)−1 (x− k
(θp−1−1θ−1
))for x ∈ [1−k
θ, k(θp−1−1θ−1
)]
θ1−p(x− k
(θp−1−1θ−1
))for x ∈ [k
(θp−1−1θ−1
), 1].
(23)
17See the correction of Section 2 of Khan and Rajan (2017) in Remark below.
21

where k ≡ xK(1−d)(θ−1)xLθ−xK(1−d) . By construction, 1− d = θ1−p, so
θ − 1
θp − 1=
θ − 1
θ/(1− d)− 1=
(θ − 1)(1− d)aIsIb
<xK(1− d)(θ − 1)
xLθ − xK(1− d)= k.
To see why the inequality above holds, we note
θxL =
(sIb
aI+ (1− d)
)xL <
(sIb
aI+ (1− d)
)xK
θxL − (1− d)xK <
(sIb
aI
)xK
aIsIb
<xK
θxL − (1− d)xK,
where the first inequality follows from xL < xK . Moreover, we know θxL > xK , soθxL − (1− d)xK > dxK , or equivalently, 1
d> xK
θxL−(1−d)xK, which implies
θ − 1
θp−1 − 1=
(θ − 1)(1− d)
d>xK(1− d)(θ − 1)
xLθ − xK(1− d)= k,
where the first equality follows from θ1−p = 1− d. Since p > 2 and θ > 1, we must have(θ − 1)/(θp − 1) > 0 and (θ − 1)/(θp−1 − 1) < 1. Thus, we have shown that
0 <θ − 1
θp − 1< k <
θ − 1
θp−1 − 1< 1.
According to Theorem 2.2 in Khan and Rajan (2017), for almost every real numberx ∈ [0, 1], there corresponds an integer nx > 0 such that gnx
b (x) is a point of period pfor gb. Further, since f is one-to-one, onto, and continuous, and f−1 is continuous, f ishomeomorphism. According to Ruette (2018), gb and g are topologically conjugate. Theresult above carries over to g and we obtain the desired conclusion.
Remark 2. Notice that the first inequality concerning the parameter b in Section 2 ofKhan and Rajan (2017) should be corrected as
0 <m− 1
mp − 1< b <
m− 1
mp−1 − 1< 1.
Moreover, as pointed out by one of our referees, for p = 3, f 3(ξ) = ξ and hence theinequality in the proof of Lemma 2.1 in their paper should be written as 0 < f 3(ξ) ≤ ξ <f(ξ) < f 2(ξ).
Proof of Proposition 2: We borrow the follow characterization results for the optimaldynamics from Deng, Fujio, and Khan (2019).
22

Lemma 5. (Theorem 1, Deng, Fujio, and Khan, 2019) Let ζ > 1. The optimal policycorrespondence h satisfies
h(x) ⊂
βx for x ∈ (0, x/β][x, βx] for x ∈ (x/β, aI ][x, ζ(x− x) + x] for x ∈ (aI , x][ζ(x− x) + x, x] for x ∈ (x, aC ][(1− d)x, x] for x ∈ (aC , x/(1− d))(1− d)x for x ∈ [x/(1− d),∞)
,
where β ≡ b/aI + (1− d) and the golden rule stock x = aC(ζ + 1− d)/(ζ + 1).
If aIβ ≤ aC , then the result directly follows from Lemma 5. Consider aIβ > aC ,or equivalently, aI > aC/β. From Lemma 5, we only need to consider x in (aC/β, x −(aC − x)/ζ). Suppose on the contrary there exists x0 ∈ (aC/β, x − (aC − x)/ζ) andx∗1 ∈ h(x) such that x∗1 > aC . Consider an optimal program, x∗t∞t=0 starting from x0.Since x∗1 > aC , x∗2 > (1−d)aC due to the feasibility of technology. We know from Lemma5 that x∗2 ≤ maxx, (1 − d)x∗1. Then, we can always find a program, starting from thesame initial capital stock x0 takes x′1 = x∗1 − ε for a sufficiently ε > 0 and the same planafterwards, i.e., x′t = x∗t for t ≥ 2. For ε small enough, this program is technologicallyfeasible. In order to check whether the latter program overtakes the former it suffices tocompare the sum of utilities for the first two periods since these two programs take thesame plan after the second period. Then we have
u(x0, x∗1) + ρu(x∗1, x
∗2)− u(x0, x
∗1 − ε)− ρu(x∗1 − ε, x∗2)
= − aIaCb
(x∗1 − x∗1 + ε) + ρ1− db
(x∗1 − x∗1 + ε)
=1− db
ε(ρ− aIaC(1− d)
) < 0
where the inequality follows from ρaC(1 − d) < aI . This leads to a contradiction andestablishes the desired result.
7.2 Illustration of the Equilibrium Dynamics when aC = aI
Figure 7 illustrates equilibrium dynamics under a special case of aC = aI which resemblesa one-sector model.
23

Figure 7: Characterization of Equilibrium Dynamics: aC = aI
7.3 The Equilibrium Dynamics for the RSS Model
When aI = 0, our technological specification follows the Robinson-Solow-Srinivasan(RSS) model. In this case, xL = 0 and xK = (1 − sC)aC . With a slight modification ofthe argument, Proposition 1 applies and the equilibrium dynamics is given by
g(x) =
b− ζx for x ∈ [0, (1− sC)aC ]
(1− d)x+ sCb for x ∈ ((1− sC)aC ,∞).(24)
If the dynamics does not lead to convergence, the check-map, as in an optimum growthRSS model with certain restrictions on the discount factor (Khan and Mitra, 2012),emerges. Note that under the RSS specification, sI does not enter the equation forequilibrium dynamics. This is because there are only two types of temporary equilibrium:saving rate of the capital income no longer matters for growth if there is full utilizationof resources or if the rental rate is zero under the excess supply of capital. Figure 8illustrates the equilibrium dynamics of this special case.
7.4 Illustration of the Equilibrium Dynamics when (1− d)p−1θ = 1
Figure 9 illustrates equilibrium dynamics for (1 − d)p−1θ = 1 with p = 3, θ = 4, andd = 1/2. Under the condition of (1 − d)p−1θ = 1, any initial stock in the M”V regionleads to a period-p cycle.
24

Figure 8: Equilibrium Dynamics: The RSS Specification
Figure 9: Equilibrium Dynamics for (1− d)p−1θ = 1 (θ = 4, d = 1/2)
25

References
Amano, A. (1964). A further note on Professor Uzawa’s two-sector model of economicgrowth. Review of Economic Studies, 31, 97–102.
Atkinson, A. (1969). The timescale of economic models: How long is the long run?Review of Economic Studies, 36 (2), 137–152.
Benhabib, J. and Day, R. (1982). A characterization of erratic dynamics in the over-lapping generation model. Journal of Economic Dynamics and Control, 4, 37–55.
Burmeister, E. and Dobell, A. R. (1970). Mathematical Theories of EconomicGrowth. New York: MacMillan.
Carter, Z. D. (2020). The Price of Peace: Money, Democracy and the Life of JohnMynard Keynes. London: Random House.
Corden, W. M. (1966). The two sector growth model with fixed coefficients. TheReview of Economic Studies, 33, 253–262.
Day, R. and Shaffer, W. (1985). Keynesian chaos. Journal of Macroeconomics, 7,277–295.
Deng, L., Fujio, M. and Khan, M. A. (2019). Optimal growth in the Robinson-Shinkai-Leontief model: the case of capital-intensive consumption goods. Studies inNonlinear Dynamics and Econometrics, 23 (4), 20190032.
Dixit, A. (1970). Growth patterns in a dual economy. Oxford Economic Papers, 22 (2),229–234.
Dixit, A. K. (1976). The Theory of Equilibrium Growth. Oxford University Press.
Fujio, M. (2005). The Leontief two-sector model and undiscounted optimal growthwith irreversible investment: the case of labor-intensive consumption goods. Journalof Economics, 86 (2), 145–159.
— (2006). Optimal Transition Dynamics in the Leontief Two-sector Growth Model. Ph.D.thesis, The Johns Hopkins University.
— (2008). Undiscounted optimal growth in a Leontief two-sector model with circulat-ing capital: The case of a capital-intensive consumption good. Journal of EconomicBehavior & Organization, 66 (2), 420–436.
— (2009). Optimal transition dynamics in the Leontief two-sector growth model withdurable capital: the case of capital-intensive consumption goods. The Japanese Eco-nomic Review, 60 (4), 490–511.
26

— and Khan, M. A. (2006). Ronald W. Jones and two-sector growth: Ramsey optimal-ity in the RSS and Leontief cases. Asia-Pacific Journal of Accounting & Economics,13 (2), 87–110.
Hahn, F. H. and Matthews, R. C. O. (1964). The theory of economic growth: Asurvey. The Economic Journal, 74 (296), 779–902.
Hammond, P. J. and Rodriguez-Clare, A. (1993). On endogenizing long-rungrowth. The Scandinavian Journal of Economics, 95 (4), 391–425.
Inada, K.-I. (1963). On a two-sector model of economic growth: comments and ageneralization. Review of Economic Studies, 30, 119–127.
— (1964). On the stability of growth equilibrium in two-sector models. Review of Eco-nomic Studies, 31, 127–142.
Keynes, J. M. (1923). A Tract on Monetary Reform. London: Macmillan.
Khan, M. A. and Mitra, T. (2005). On choice of technique in the Robinson-Solow-Srinivasan model. International Journal of Economic Theory, 1 (2), 83–110.
— and — (2006). Undiscounted optimal growth in the two-sector Robinson-Solow-Srinivasan model: a synthesis of the value-loss approach and dynamic programming.Economic Theory, 29 (2), 341–362.
— and — (2012). Impatience and dynamic optimal behavior: a bifurcation analysis ofthe Robinson-Solow-Srinivasan model. Nonlinear Analysis: Theory, Methods & Appli-cations, 75 (3), 1400–1418.
— and Piazza, A. (2011). Optimal cyclicity and chaos in the 2-sector RSS model: ananything-goes construction. Journal of Economic Behavior & Organization, 80 (3),397–417.
— and Rajan, A. V. (2017). On the eventual periodicity of piecewise linear chaoticmaps. Bulletin of the Australian Mathematical Society, 95 (3), 467–475.
Li, T.-Y. and Yorke, J. A. (1975). Period three implies chaos. The American Math-ematical Monthly, 82 (10), 985–992.
Mann, G. (2017). In the Long Run We Are All Dead: Keynesianism, Political Economyand Revolution. London: Verso.
Matsuyama, K. (1999). Growing through cycles. Econometrica, 67 (2), 335–347.
Mitra, T., Nishimura, K. and Sorger, G. (2006). Optimal cycles and chaos. In R.-A. Dana, C. Le Van, T. Mitra and K. Nishimura (eds.), Handbook of Optimal Growth,vol. 1, 6, Springer, pp. 141–169.
27

Nathanson, M. B. (1977). Permutations, periodicity, and chaos. Journal of Combina-torial Theory, Series A, 22 (1), 61–68.
Nishimura, K. and Yano, M. (1994). Optimal chaos, nonlinearity and feasibility con-ditions. Economic Theory, 4 (5), 689–704.
— and — (1995). Nonlinear dynamics and chaos in optimal growth: an example. Econo-metrica, 63 (4), 981–1001.
— and — (1996). Chaotic solutions in dynamic linear programming. Chaos, Solitons &Fractals, 7 (11), 1941–1953.
Ormerod, P. and Rosewell, B. (2006). Validation and verification of agent-basedmodels in the social sciences. In F. Squazzoni (ed.), Epistemological Aspects of Com-puter Simulation, Springer, pp. 130–140.
Ruette, S. (2018). Chaos on the Interval. Available online.
Shinkai, Y. (1960). On equilibrium growth of capital and labor. International EconomicReview, 1 (2), 107.
Sorger, G. (1994). On the structure of Ramsey equilibrium: cycles, indeterminacy,and sunspots. Economic Theory, 4 (5), 745–764.
Steedman, I. (1990). Growth and distribution: a muddling exercise. Cambridge Journalof Economics, 14 (2), 229–232.
Takayama, A. (1963). On a two-sector model of economic growth: a comparative staticsanalysis. Review of Economic Studies, 30, 95–104.
Tobin, J. (1989). Growth and distribution: a neoclassical Kaldor-Robinson exercise.Cambridge Journal of Economics, 13 (1), 37–45.
Turnovsky, S. (2003). Old and new growth theories: a unifying structure? In N. Sal-vadori (ed.), Old and New Growth Theories: an Assessment, Edward Elgar, pp. 1–44.
Uzawa, H. (1961). On a two-sector model of economic growth. Review of EconomicStudies, 29, 40–47.
— (1963). On a two-sector model of economic growth II. Review of Economic Studies,30, 105–118.
28