-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
1/14
Procedia Engineering 39 ( 2012 ) 261 274
1877-7058 2012 Published by Elsevier Ltd.doi:
10.1016/j.proeng.2012.07.033
XIIIth International Scientific and Engineering Conference
HERVICON-2011
Estimating Influence of Inertial Resistance of Throttle
forHydraulic Balancing Device On Rotor Axial Vibration
A. Korczak a, V. Martsynkovskyy b, S. Gudkov c, c*aSilesian
University of Technology, Faculty of Energy And Environmental
Engineering, St. Konarski 18 Street, 44-100 Gliwice,
Poland b,cSumy State University, Department of General Mechanics
and Dynamics of Machines, 2, Rimsky-Korsakov Street,
Sumy 40007, Ukraine
Abstract
There had been considered axial vibration of the rotor equipped
with an automatic balancing system for axial forces.There were
constructed amplitude and phase frequency characteristics, as well
as evaluated influence of inertialresistance into throttling
channels of auto discharge system. There were identified damping
properties of resistancedevices.
2011 Published by Elsevier Ltd. Selection and/or peer-review
under responsibility of Sumy State University
Keywords : Rotor; dynamics; hydraulic balancing device;
throttles; inertial resistance; vibration amplitude; critical
frequency.
1. Introduction
While operating, the centrifugal pumps with automatic balancing
systems sometimes expose higheraxial vibration of the rotor [1],
which can be explained either by resonance in the system of rotor
autocharge, or self-exciting oscillations due to loss of the system
dynamic stability. The rotor axial vibrationgives rise to the
significant stress pulsations in the relief disk and in
cross-section of the shaft, and may
also cause the elevated transverse vibration of the rotor. In
this regard, calculating the amplitude andphase frequency
characteristics of the balancing system and testing its dynamic
stability are essential toensure the reliability of high-speed and
high-pressure pumps.
* Corresponding author. Tel.:+38-0542-333594;
fax:+38-0542-333594. E-mail address : [email protected].
Available online at www.sciencedirect.com
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
2/14
262 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
At calculating the dynamic charalumped-parameter system making
axwhich the corresponding steady-statethe static calculation [1,
2].
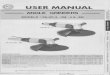
2. Equation of rotor axial vibration
Based on Newton's 2nd Law, the eq
,+=++ k T F kz zc zm z
where: k is an adjusted (reduced) sttheir previous compression;
T is
( ) 22 5,0 p A AF c z += is a balancing p
Fig. 1. Design scheme for balancing system
There is performed dividing of all
20* pk n= and go over to dimen
+=++ uuT uT 2
21 ,
0
22
0
221 ,, =
=
= pk
pc
T pm
T
n
z
p AF 2
20
,+
===
teristics, the rotor with the balancing device is coial
oscillations relative to the position of static eqalues of
pressure, face clearance and flow rate are
uation of axial vibration can be written as follows (Fi
iffness of the pressing-out device elastic elements; an axial
force being balanced while acting oressure force acting on the
balancing disk.
the terms of the equation by the conditional hydrossionless
variables:
00
2 ,
=
pk
,20
, H z
u p AT
n
== ,
2
2,5,
= .
sidered as ailibrium, foretermined by
. 1):
(1)
is a value of n the rotor;
tatic stiffness
(2)
(3)
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
3/14
263 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
where: m - mass of the rotor; c - coefficient for damping the
rotor axial vibration; , thedimensionless axial forces, the
dimensionless previous stress of the pressing-out device; 0 -
thearea of the impeller inlet funnel;
- nominal pump discharge pressure.
On introducing the operator of differentiation with respect to
time, dt d p = , there is written equation
of axial vibrations in the operator form:
,)(1 +=u p D
(4)
,)( 222
11 pT pT p D ++=
is an own operator of the rotor axial vibrations.
3. Equations of unsteady flow in throttles
The equation of unsteady turbulent flow in the i-th throttle can
be written as:
ir iaiiiii p Q J Q R p +=+=2 ,
where 1+= iii p p - full pressure drop on the th throttle,2iiia
Q R p = , iiir Q J p = - pressure
expenditures to overcome effective resistance and reactance, iQ
- instantaneous flow rate, i R and i J - the
coefficients of effective friction resistance and reactance
(inertial resistance) of the fluid ( )2,1=i .Effective resistance
at each instant of time is determined under the formulas for steady
flow,
neglecting its weak dependence on the frequency of the pressure
pulsations [3]. For the turbulent flow,
the effective resistance coefficients make 2 / 1 ii g R = ,
where the conductivity of the ring and facethrottles is computed
under formulae [2]:
( )[ ] 5,0111111 2 / 5,02
+= l Rg ,
(5)
( ) ( )[ ] 5,0222322 25,0
++= zl z R Rg ,
,04,0 06,02
- friction coefficients for self-field of the turbulent flow for
the annular and faceclearances, respectively; 21 =1,01,15
coefficients of local (input) resistances; 232 R Rl = .
Reactance is determined in the accordance with the Law
concerning rate of change of momentum iK :
ir iiiiiiiiii p f F Qlv f lK F
dt dK
==== ,, ,
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
4/14
264 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
,iiir i Ql p f = iiii
iir Q J Q f
l ==
.
On comparing the left and right sides, we here obtain
, / iii f l J = (6)
where; - momentum coefficient taking into account the uneven
distribution of the fluid velocity over thechannel cross section;
ii l f , - cross-sectional area and length of the i-th channel; for
laminar flow in a circular
channel ,2,1= and for the turbulent flow 1 ; ;
fvQ =
v - average speed over the section f .With the account of the
flow rate expression iaii pgQ = the pressure losses to overcome
the
inertia of the fluid take the form:
)( iaiiir pgdt d J p = = 1** , += iiiaii p p p p p ,
where
).3,2,1(),( 1` === + i p pgdt d
J p p p p iiiiiir ii
Provided that inertia is not taken into account, iiir p p == *,0
. The last expressions are nonlineardifferential equations of the
first order concerning pressure .i p
Henceforth we herein restrict ourselves to consideration of
small deviations of variables in comparisonwith their steady-state
values, which fact allows passing to the linearized equations (to
the equations in
variations):
.)(2
)(01
1001
+=
+
++
ii
iiiiiiiii
p p
p pg p pg
dt d
J p p
Subscript "0" indicates the values of the variables in the
steady (equilibrium) state defined by a static
calculation. In the steady state 0=Q , 0= ir p 00 ii p p = ,
therefore:
),(5,0 10
0
0
0+
=ii
iii
iiii p p
p
Q J g
g
Q J p p
000000)1(00 , pg pgQ p p p eiiiii === + . (7)
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
5/14
265 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
The conductivity of the cylindrical throttle at a constant
eccentricity (the rotor radial vibrations are not takeninto
account) is independent of the axial displacement of the rotor and
keeps the constant value, so .01 =gThe conductivity of the face
throttle is determined by the second formula (5) and taking into
account that underthe steady condition .01 =g , the variation of
its time derivative is reduced to the form:
uugg n5,0
22 5,1= , .5,15,10
205,0022 uu
guugg n ==
Further, to shorten the description, the signs of variations are
omitted. After passing to dimensionlesspressures
/ p p ii = and clearances , / 2 zu = the equations (6) are
reduced to the form:
uT T T T 1222221221111111 , =++=+ ,
or in the operator form:
( ) ( ) pT D pT D 12222122111111 , =+= ; 1)( 11 += pT p D ii ,
(8)
where
0
01 2 i
ii p
Q J T
= , i
ii
i
p p
p p
==
0
0 , ,ko
io
k ik i
i
p p
u
===
=
10
00
0i ,
33. (9)
Provided that inertial resistance is not taken into account,
iiiii p p DT J ==== *11 ,1,0 .
4. Flow rate balance equation
Equations (8) contain unknown pressure i and pressure 2 into the
hydraulic balancing devicechamber. To calculate these pressures,
there is used the flow rate balance equation, which in contrast
tothe static equations 02010 QQQ == must take into account the flow
rate values for displacement
zQv
=2 and for compression E V pQ p / 222 = , where 2V is volume of
the chamber, and E is an
adiabatic bulk modulus of fluid. Thus, the flow rate balance
equation takes the form
2221 pv QQQQ ++= or E V p z pg p pg / 22223
2211++=
. (10)
The last equation is nonlinear (the flow rates 321 ,, QQQ are
nonlinear), so it is necessary to linearizethem, transiting to the
equations in variations. Taking into account that in equilibrium
position
200*21001 , p p == , we herein omit the signs of variations:
( ) .22
3
2 22
*220
0
0
02*1
10
0 p E
V u z
p
Qu
u
Q p p
p
Qn
++
+=
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
6/14
266 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
Having multiplied this equation by 0102 Q and after transition
to dimensionless pressures takinginto account designations (9), we
herein obtain:
u pQ
p zu
EQ pV
n
n
0
1012122
0
1022*1
22 +++
=
.
Further, we introduce designations of time constants and
differential operators:
0
022
20
0
n323
10
0
n222 3
2,
2,
2Q
z p p
EQ pV
T p p
EQ pV
T nn
=
=
= ,
(11)
1)(,1)( 22222222 +=+= p p M pT p D ,
and we reduce the flow rate balance equation to the following
form:
u p M p D )()( 2212121222 = . (12)
From equations (8), it follows:
).(1
),(1
122212
2211111
1 puT D pT
D =+=
Having Substituted these expressions into (12), we herein obtain
an equation concerning 2 :
( ) ( ) u M puT D
pT D
D 221122212
12211111
22211 += .
Then we bring it to a common denominator and group the
members
( ) ( )u pT M D D D D pT D D D D 122212111112211121112221211 =+
. (13)
Based on (3) 2 = , therefore, having lettered the operators of a
controller and a device detectinginfluence by mistake
( ) ( ) ( )u pT M D D p M D pT D D D D p D
12221211111211122212112=+=
2; , (14)
we herein write the equation of a controller in the following
form:
( ) ( ) ( )u p M p D p D 211122 = . (15)
Further we perform the multiplication in expression (14) and
group the addends in powers of p :
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
7/14
267 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
( ) 32213023221302 ;)( b pb pb pb p D +++=+++= ,.
where
( ) ;1,,, 12322121112212112212212110 +=++=+== T T T T T T T
(16)
1,),(, 32211212112212212110 =+=+== bT bT T bT T b .
5. Controller transfer function
From equation (15), it is possible to determine the transfer
function with the error, that is, with thedeviation of the
clearance (of the controlled variable) from its steady-state value.
With due account of theexpressions of the operators (15), the
controller transfer function with the error takes the form
( ) ( )( ) 32213032
21
30
12
21
b pb pb pb
p D
pW u ++++++=== . (17)
In the case of the harmonic effects, it represents the frequency
transfer function or dynamic stiffness of the controller, which
allows at the first approximation to estimate the natural frequency
of axial vibrationsof the rotor and the stability of the system as
well.
For the steady-state condition, 0== dt d p and the transfer
function of the controller become thecoefficient of the hydraulic
balancing device static stiffness:
( )12
13
31 1
10
+===
ab
W su . (18)
The dynamic stiffness possesses important informative features:
it allows setting the range of variations for the natural
frequencies of the rotor axial vibrations and at the first
approximation, toevaluate the system stability.
As for the harmonic signals, which are considered in the
frequency transfer functions, thedifferentiation operator i p = .
On introducing such a change, we herein obtain the frequency
transferfunction of the controller or a complex dynamic stiffness
of the system:
( )( )
( )( )022123
02
212
31
2
21)( aaiaa
bbibbi Di M
iW u
+
+=== . (19)
At 0= the last expression represents the controller
dimensionless static stiffness: .)0( suW = At
22
221
0
01)( T a
biW u
=== . (20)
-
7/30/2019 Estimating Influence of Inertial Resistance of
Throttle for Hydraulic Balancing Device on Rotor Axial Vibration
2012
8/14
268 A. Korczak et al. / Procedia Engineering 39 ( 2012 ) 261
274
We herein obtain the maximum modulus value corresponding to the
stiffness of conventionally non-flowing part, the stiffness of
which is only caused by the compressibility of the fluid in the
chambers of the hydraulic balancing device.
Further, we herein disjoint real and imaginary parts in
(19).
[ ]V iU iW uuu )()()( 1 +== , (21)where
( )( ) ( )( )( ) ( )
( )( ) ( )( )( ) ( )
.
,
20
22
221
23
12
302
202
212
3
20
22
221
23
02
202
22
12
312
3
aaaa
bbaabbaaV
aaaa
bbaabbaaU
u
u
+
=
+
+=
(22)
If the real and imaginary parts are positive 0,0 >> uu V U
, they respectively represent the positiveadditions to the
dimensionless stiffness
of the pressing out device and to the relative external
damping 2 . The negative values uU and uV destabilize the
system, and while 2T V u = , the system is
at the oscillatory boundary and while nuU = , the system is at
the aperiodic stability boundary. In theabsence of the external
damping ( )02 the rotor stabilization is provided by damping the
controller.The condition 0>uV comes to the inequality
( )( ) ( )( )0123022022123 > bbaabbaa ,
which can be used for preliminary (with some allowance)
assessing the stability of the system. Inparticular, for the pivot
without additional external throttle and not taking into
consideration the fluidinertia, the condition 0>uV is reduced to
form [1]
21
22222
+
> T or 2010
0
0
2
3 p p p E
zV
e