Embed Size (px)
Citation preview
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 1/27
1
Tema 18. Geometría en el contacto rueda – carril
1- Introducción general
En este tema, y en los siguientes, se trata de acometer el estudio de uno de los
mayores problemas que existe a nivel mecánico en el errocarril como es el
tratamiento del contacto rueda carril desde un punto de vista geom!trico,
cinemático y dinámico.
Este es un tema de una comple"idad y diicultad altas tanto en la modeli#aci$n del
contacto rueda – carril, como en la resoluci$n de los problemas cinemático y
dinámico en el sistema tren y en la vía.
%delantando a las conclusiones de todo el estudio se puede decir que&
• El contacto rueda – carril es comple"o, cambiante en el tiempo y diícilmente
tratable desde un punto de vista geom!trico general teniendo en cuenta
todas las variables que intervienen.
• 'as simpliicaciones introducidas en los modelos permiten unas conclusiones
muy sesgadas del verdadero problema. (in embargo, un estudio sin
simpliicaciones es excesivamente comple"o y no permite ver a simple vista
soluciones prácticas )tiles.
• *omo consecuencia del estudio cinemático de un solo e"e en contacto con la
vía, se aprecia un movimiento peri$dico sinusoidal cuya dependencia es
exclusiva de los parámetros mecánicos de la rueda y el e"e montado. Este
movimiento es siempre inestable y por lo tanto tiene tendencia a que el e"e
se +salga de la vía. (e denomina movimiento de la#o.
• En el caso de un bogie completo se deducirá que, desde un punto de vista
dinámico, el sistema mecánico unciona de una manera inestable con
independencia de si la vía es recta o curva.
• -nidos estos dos estudios se concluye que, sin considerar aspectos de la
geometría de vía, el sistema mecánico de rodadura de los trenes contacto
del tren con el carril/ es por naturale#a inestable y que tiene una tendencia
elevada a salirse del camino de rodadura.
• *onsiderando aspectos geom!tricos de la vía y uni!ndolos a las condiciones
propias del sistema mecánico se deriva que la probabilidad de que un tren
se salga de la vía es elevada y que, en caso de p!rdida de parámetros
geom!tricos de vía, aumenta más si cabe.
2- Relaciones geométricas en el contacto rueda – carril
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 2/27
2
% la 0ora de describir el contacto rueda carril, 0ay que dividir dos casos generales&
ona de contacto en marc0a y #ona de contacto en reposo.
'a dierencia entre la #ona de contacto en reposo a la de marc0a es que en la
marc0a se producen puntos de contacto en rodadura y puntos de contacto en
desli#amiento entre rueda y carril. En reposo el contacto es siempre puntual siendo
este punto el inicio de la rodadura cuando el sistema se pone en movimiento.
Tambi!n 0ay que tener en cuenta que durante el movimiento de la rueda !sta se
deorma por el ro#amiento y el desgaste2 por lo que nunca se van a mantener las
#onas o puntos de contacto en rodadura o desli#amiento permanentemente en el
tiempo de un modo constante.
El estudio del contacto rueda – carril y su análisis geom!trico se comen#aron a
estudiar por (tep0enson 1831/ y 4lingel 1855/.
'os estudios reali#ados tratan de establecer las relaciones cinemáticas entre los 6
grados de libertad del e"e montado con respecto a la vía. Estas relaciones
cinemáticas sirven de base para deinir los problemas dinámicos que se derivan del
movimiento transversal. 'os problemas dinámicos a estudiar son&
• Tratamiento lineal& 7ara aquellos cálculos que se aseme"an a la linealidad
como por e"emplo& estabilidad del e"e transversal en marc0a, respuesta del
e"e en recuencia etc.
• Tratamientos no lineales& 7ara aquellos casos condicionados por el
dominio del tiempo bac0es/ e impactos.
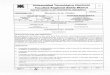
Los 6 grados de libertad presentes en un eje ferroviario son los siguientes:
X 'ongitudinal vía Y Transversal vía Z 7erpendicular vía
Z
α
ϕ
Y
Ψ
X
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 3/27
3
Ψ 9alanceo ϕ *abeceo α :otaci$n propia la#o/
% la 0ora de la modeli#aci$n del contacto rueda carril se presentan los siguientes
problemas en las ruedas erroviarias&
• 'os periles de las ruedas son diíciles de modeli#ar2 ya que se 0a de
asegurar el correcto contacto entre ruedas y carril y sus ormas son
comple"as incluyendo #onas rectas, arcos de circunerencias y * – splines.
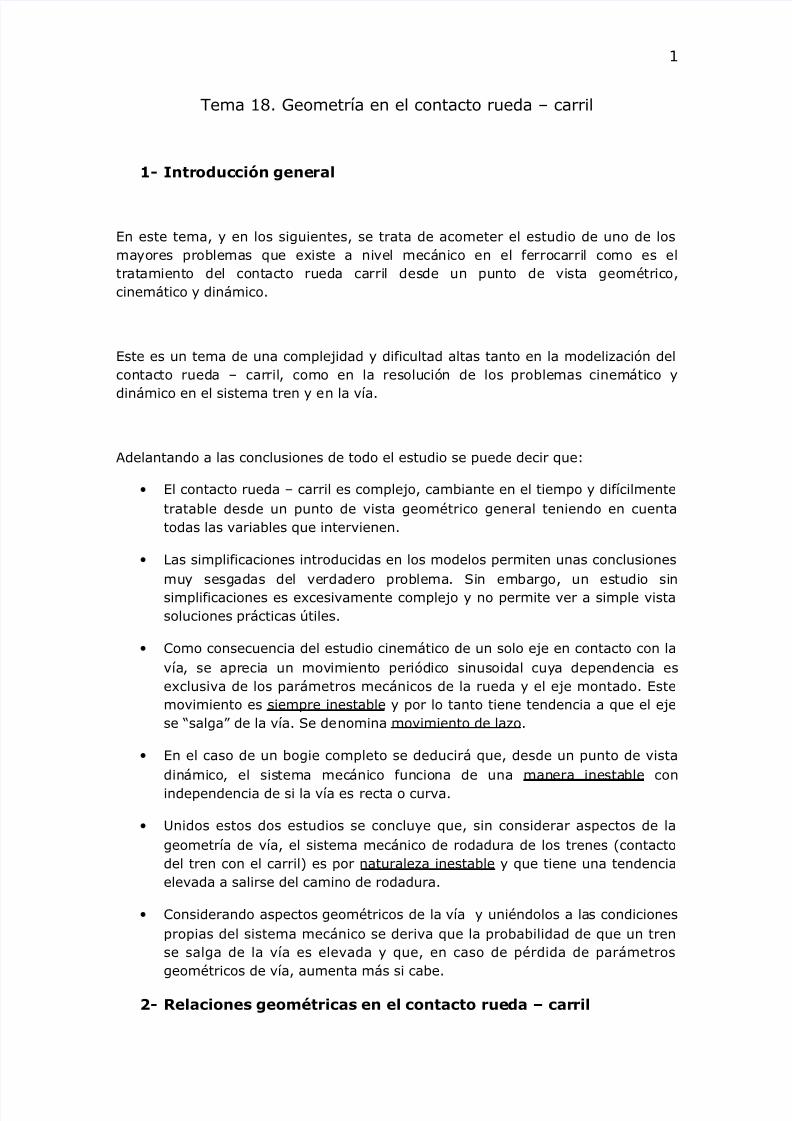
• ;esde un punto de vista te$rico el contacto rueda – carril interesa que
solamente sea sobre un punto rodadura pura/ pero en la realidad
ácilmente se da el contacto sobre dos puntos de orma que uno será un
punto en rodadura mientras que otro punto será en desli#amiento. Esta
situaci$n ocurre siempre cuando se produce un contacto de rueda con perilnuevo con carril desgastado. 7ara evitar este en$meno en origen se dise<an
periles nuevos que simulan la rueda desgastada de tal orma que se limite
la ricci$n entre rueda y carril acotando el contacto a un solo punto
asegurando la rodadura pura. 7or e"emplo peril de ruedas desgastadas tipo
=eumann/
*on respecto al carril se producen los siguientes en$menos&
• 'os periles de carril tambi!n son comple"os al componerse de #onas rectas
y curvas. %demás, y debido a que en las líneas erroviarias no se garanti#a
un )nico tipo de peril en carril ni un )nico tipo de rueda, no 0ay pautas
0omog!neas sobre el contacto variabilidad en el punto o puntos de
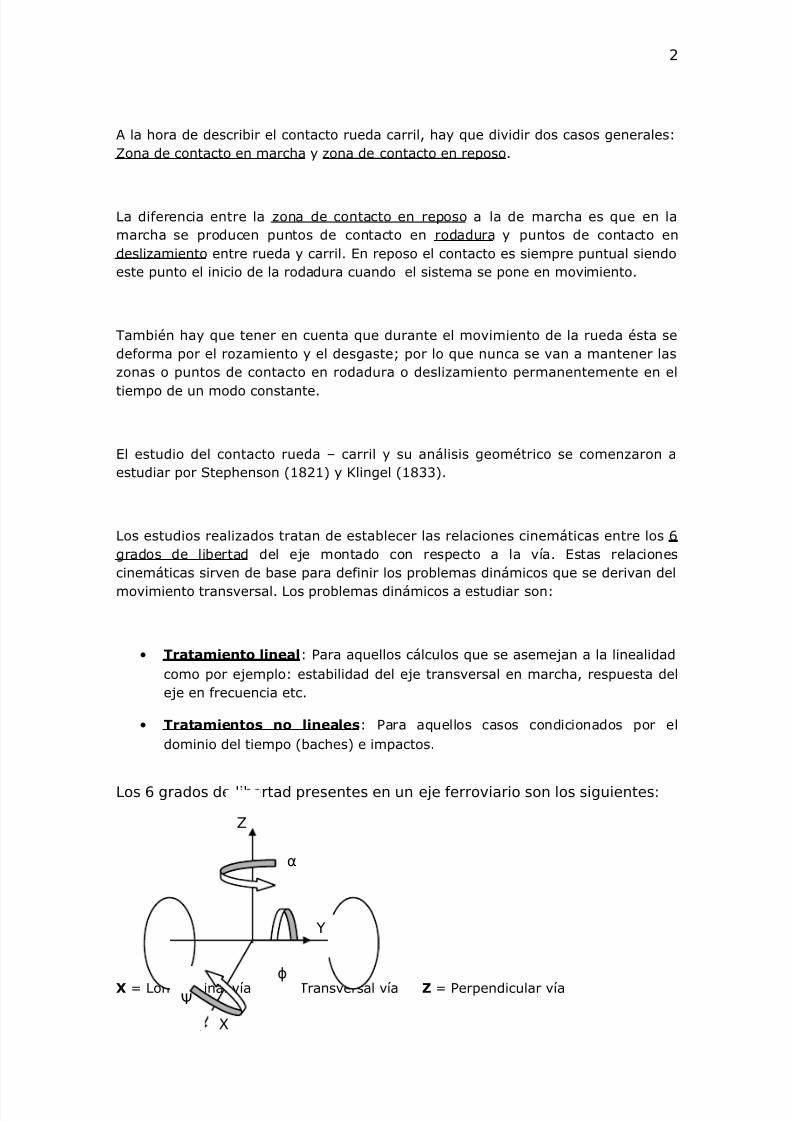
contacto/.• *onociendo el peril de los carriles se aprecia la comple"idad para adaptar el
punto de contacto a una rodadura 0omog!nea. 'a orma de los periles decarril en la #ona de contacto es la siguiente&
11
2
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 4/27
4
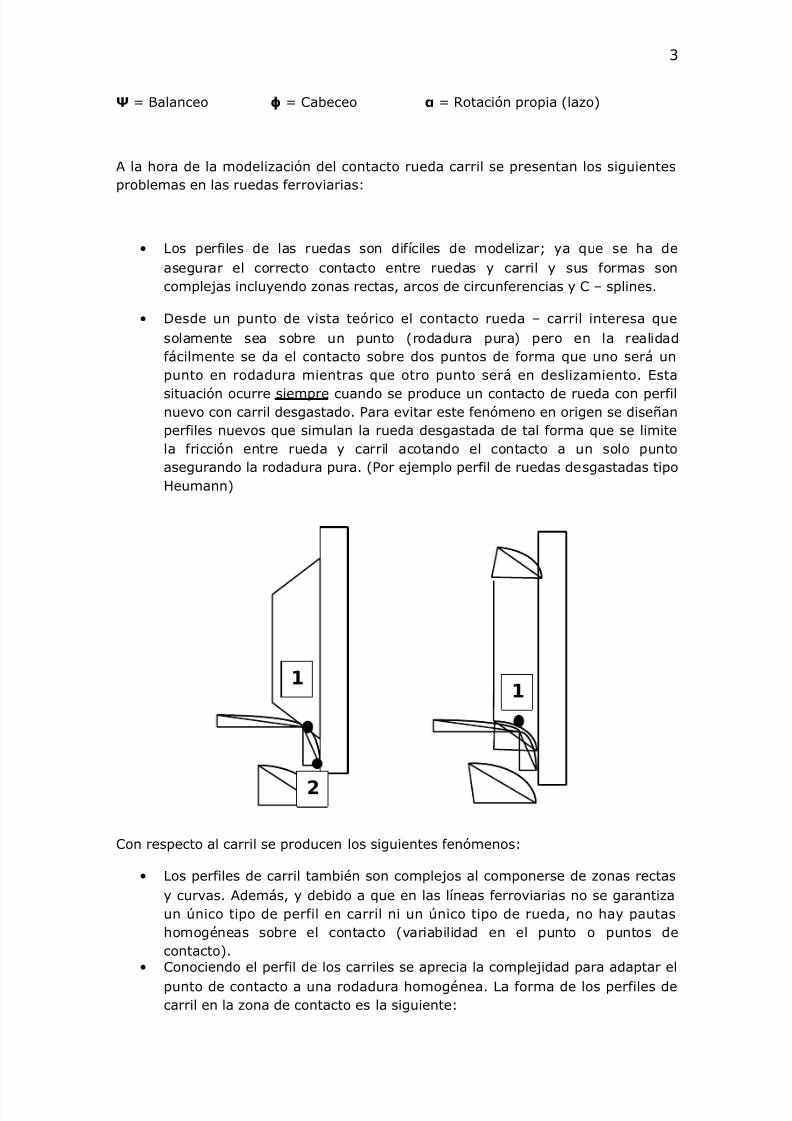
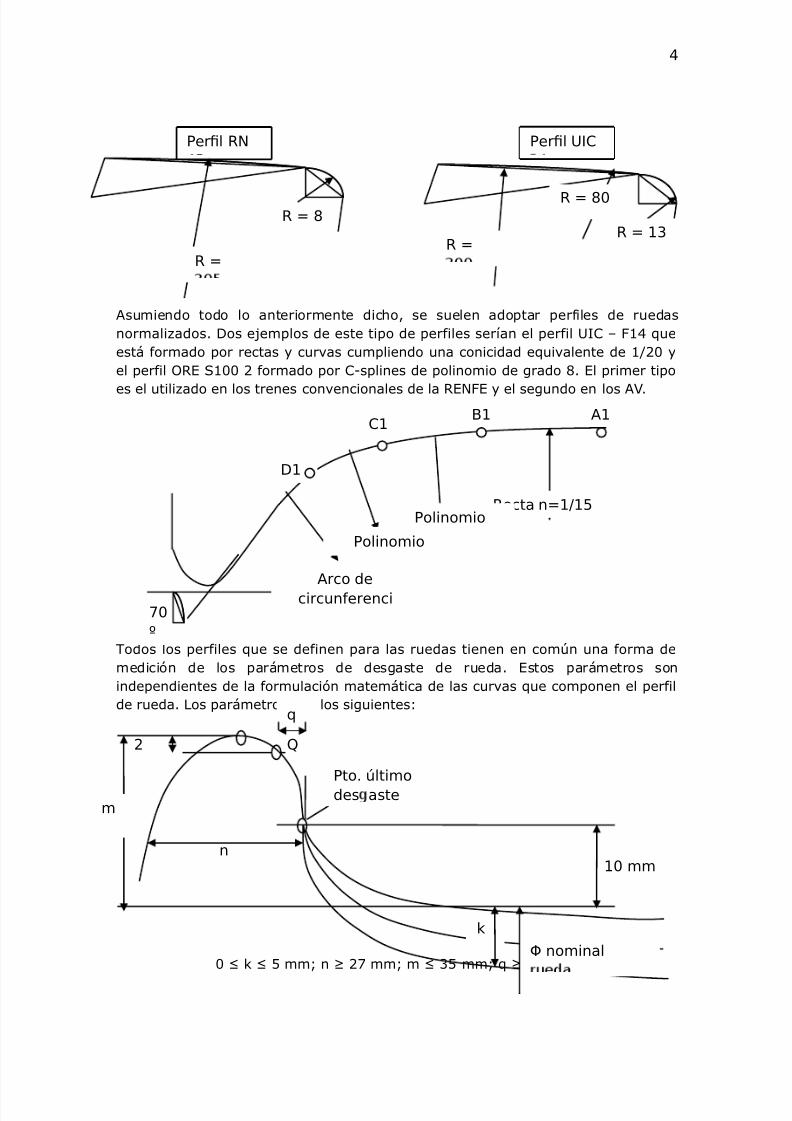
%sumiendo todo lo anteriormente dic0o, se suelen adoptar periles de ruedas
normali#ados. ;os e"emplos de este tipo de periles serían el peril ->* – ?1@ que
está ormado por rectas y curvas cumpliendo una conicidad equivalente de 1A3B y
el peril C:E (1BB 3 ormado por *Dsplines de polinomio de grado 8. El primer tipo
es el utili#ado en los trenes convencionales de la :E?E y el segundo en los %F.
Todos los periles que se deinen para las ruedas tienen en com)n una orma de
medici$n de los parámetros de desgaste de rueda. Estos parámetros son
independientes de la ormulaci$n matemática de las curvas que componen el peril
de rueda. 'os parámetros son los siguientes&
B H I mm2 n J 3K mm2 m 5I mm2 q J 6.I mm
er!l "#$er!l &'
& ( )*& ( )
& ( 13& (
& (
$1+1,1
-1
&e.ta n(1/1%olino0io
olino0io
+r.o de.ir.unferen.i
*
2
to5 lti0odes aste
0
1* 00n
7 no0inal
8

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 5/27
%
?inalmente, para simpliicar todo lo relativo a periles de ruedas de cara a cálculos y
teorías, se asimila la rueda de un ve0ículo erroviario como un bicono normal o un
bicono con resalte troncoc$nico en cada lado de la rueda banda"e y pesta<a/.
Folviendo a los grados de libertad anteriormente deinidos x, y, #, L, M, N/, M y x
son irrelevantes por lo que solamente serían deinibles y, #, L, N. ;e estos
parámetros # y L son dependientes de los otros grados de libertad, mientras que y,
N son independientes. N se conoce como el ángulo de la#o e y es despla#amiento
transversal, por lo que se deinen las siguientes relaciones&
Z(Z 9; α<
Ψ( Ψ9; α<
En la realidad se demuestra que el ángulo N es un ángulo que va independiente y
que no tiene por lo tanto dependencia con # y L. 7or lo tanto, las ecuaciones de
relaci$n anteriores se quedarán como&
Z(Z 9<
Ψ( Ψ9<
;e orma que la variable independiente será la y. 7or lo tanto el resultado gráico
de este sistema resuelto es similar a este gráico.
3- Modeliación ! medición de las relaciones geométricas
Ψ
=olu.i>n Lineal
Ψ( Ψ9<
=olu.i>n 'olineal
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 6/27
6
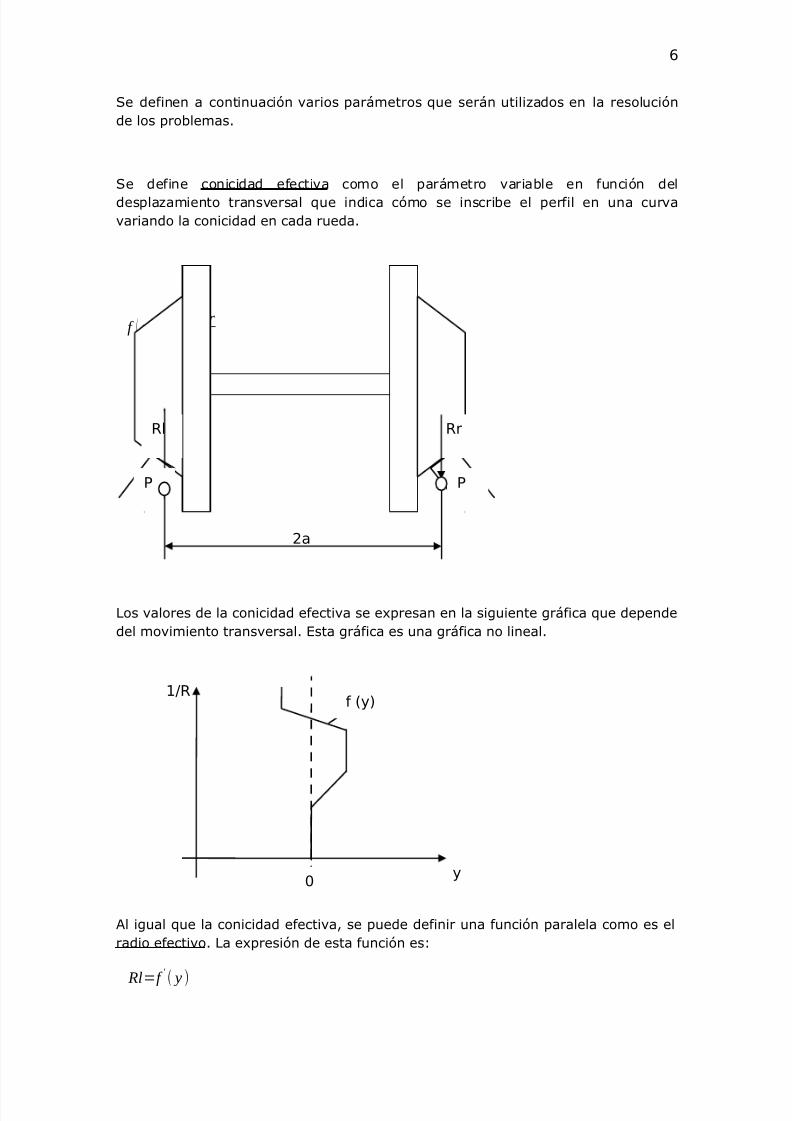
(e deinen a continuaci$n varios parámetros que serán utili#ados en la resoluci$n
de los problemas.
(e deine conicidad eectiva como el parámetro variable en unci$n del
despla#amiento transversal que indica c$mo se inscribe el peril en una curva
variando la conicidad en cada rueda.
f ( y )= Rl− Rr
2a
'os valores de la conicidad eectiva se expresan en la siguiente gráica que depende
del movimiento transversal. Esta gráica es una gráica no lineal.
%l igual que la conicidad eectiva, se puede deinir una unci$n paralela como es el
radio eectivo. 'a expresi$n de esta unci$n es&
Rl=f
'
( y )
&r&l
2a
1/&f 9<
*
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 7/27
Esta unci$n tambi!n evoluciona transversalmente con respecto a la y.
Tambi!n es posible deinir la pendiente eectiva análogamente a la deinici$n de las
otras variables anteriores. Esta pendiente eectiva tambi!n variará gráicamente en
base a sus valores transversales.
m=f '' ( y )
'a unci$n base y/ que representa estos valores en unci$n de las transversales,
se determina en muc0os casos experimentalmente mediante ensayos de rodadura y
toma de datos en el peril rueda.
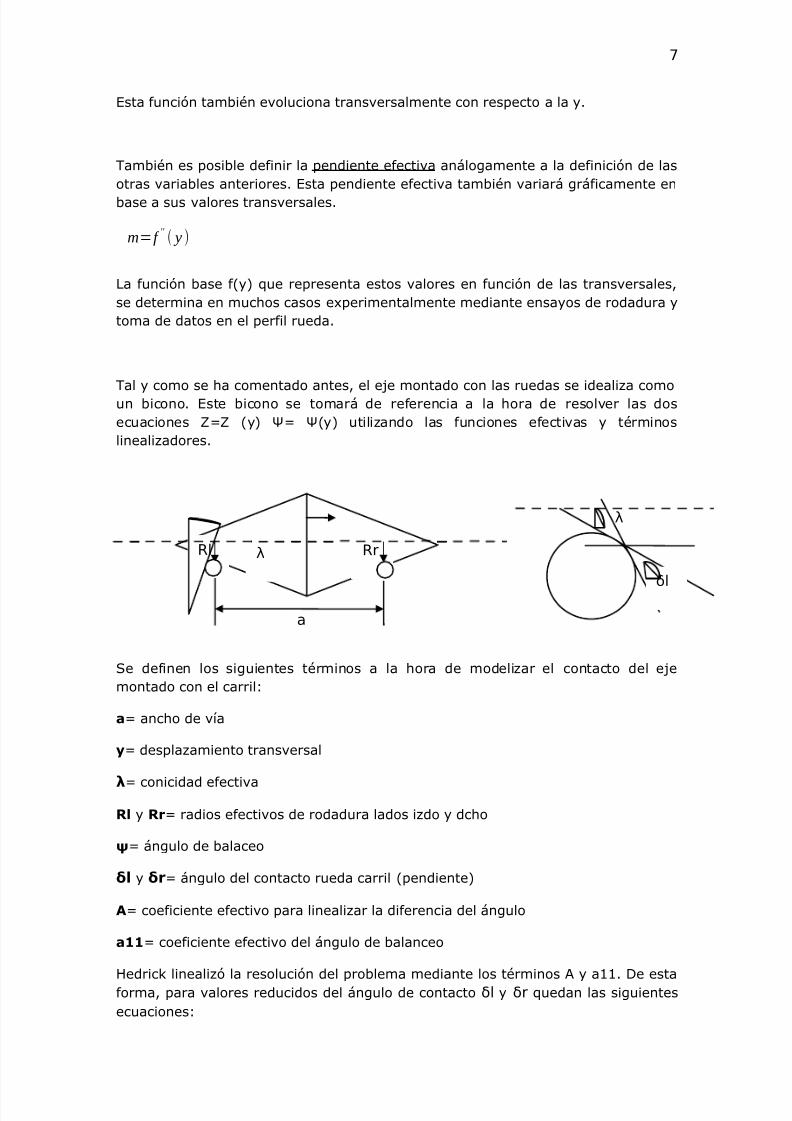
Tal y como se 0a comentado antes, el e"e montado con las ruedas se ideali#a como
un bicono. Este bicono se tomará de reerencia a la 0ora de resolver las dos
ecuaciones y/ L Ly/ utili#ando las unciones eectivas y t!rminos
lineali#adores.
(e deinen los siguientes t!rminos a la 0ora de modeli#ar el contacto del e"e
montado con el carril&
a anc0o de vía
! despla#amiento transversal
λ conicidad eectiva
Rl y Rr radios eectivos de rodadura lados i#do y dc0o
" ángulo de balaceo
δl y δr ángulo del contacto rueda carril pendiente/
# coeiciente eectivo para lineali#ar la dierencia del ángulo
a11 coeiciente eectivo del ángulo de balanceo
=edricH lineali#$ la resoluci$n del problema mediante los t!rminos % y a11. ;e esta
orma, para valores reducidos del ángulo de contacto ?l y ?r quedan las siguientes
ecuaciones&
@
@&l &r
?l
a
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 8/27
)
1
2( Rl− Rr )≅ λy
1
2( Rl+ Rr )≅ R0 9&adio no0inal de rodadura<
1
2(δl+δr )≅δ 0 9Angulo no0inal del .onta.to rueda B .arril<
1
2( δl−δr )≅
A
a y
ψ ≅ a11
a
y
*on lo que tendríamos un sistema de cinco ecuaciones con seis inc$gnitas.
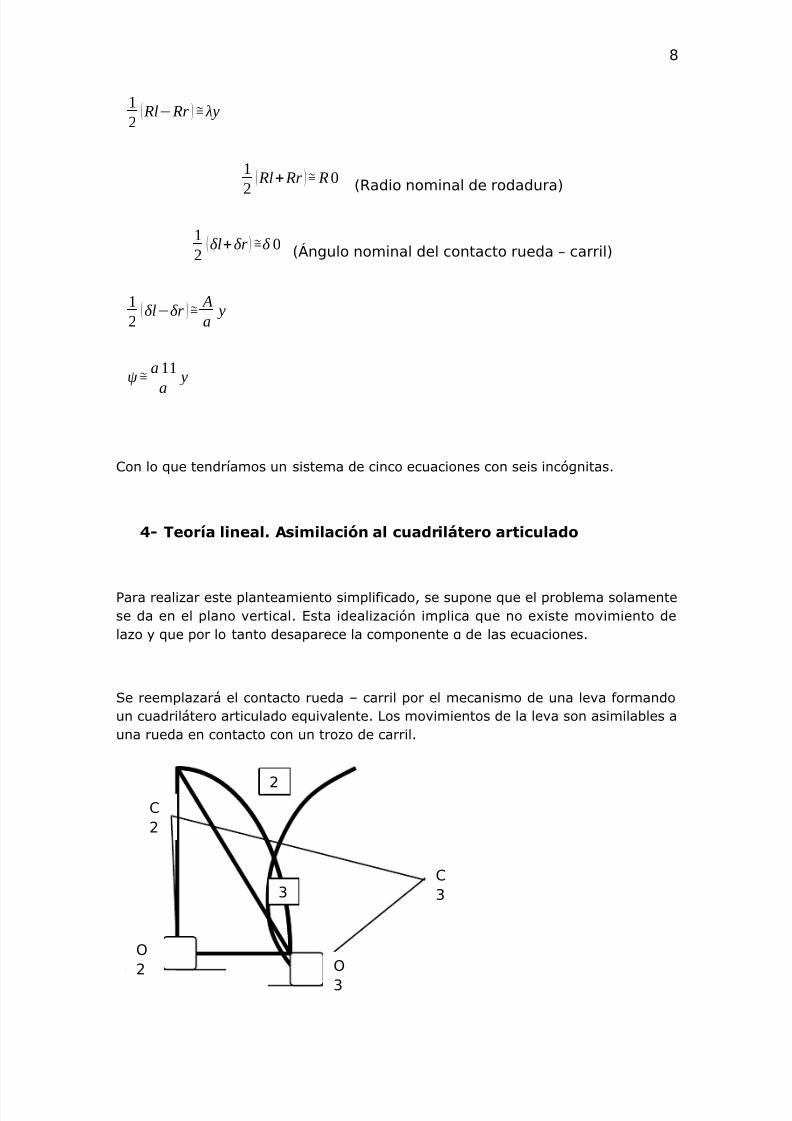
$- Teor%a lineal& #similación al cuadril'tero articulado
7ara reali#ar este planteamiento simpliicado, se supone que el problema solamente
se da en el plano vertical. Esta ideali#aci$n implica que no existe movimiento de
la#o y que por lo tanto desaparece la componente N de las ecuaciones.
(e reempla#ará el contacto rueda – carril por el mecanismo de una leva ormando
un cuadrilátero articulado equivalente. 'os movimientos de la leva son asimilables a
una rueda en contacto con un tro#o de carril.
2$2
3$3
C
3
C2
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 9/27
D
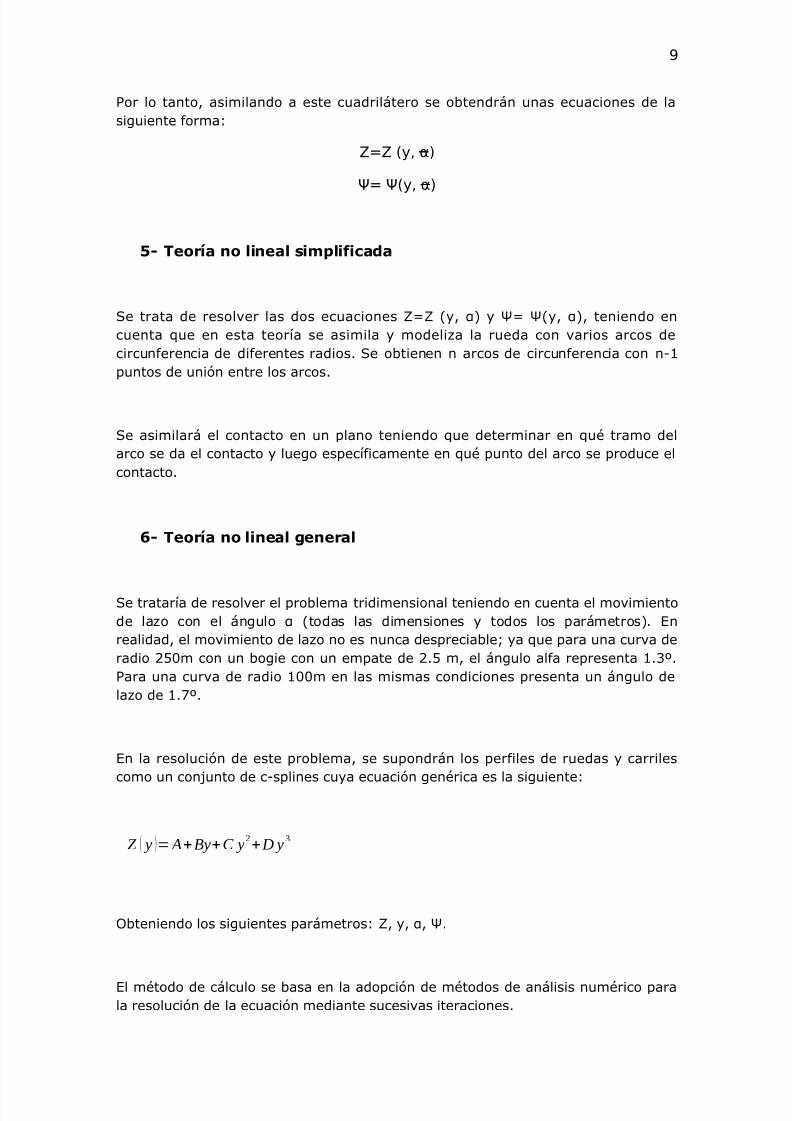
7or lo tanto, asimilando a este cuadrilátero se obtendrán unas ecuaciones de la
siguiente orma&
Z(Z 9; α<
Ψ( Ψ9; α<
(- Teor%a no lineal sim)li*icada
(e trata de resolver las dos ecuaciones y, N/ y L Ly, N/, teniendo en
cuenta que en esta teoría se asimila y modeli#a la rueda con varios arcos de
circunerencia de dierentes radios. (e obtienen n arcos de circunerencia con nD1
puntos de uni$n entre los arcos.
(e asimilará el contacto en un plano teniendo que determinar en qu! tramo del
arco se da el contacto y luego especíicamente en qu! punto del arco se produce el
contacto.
+- Teor%a no lineal general
(e trataría de resolver el problema tridimensional teniendo en cuenta el movimiento
de la#o con el ángulo N todas las dimensiones y todos los parámetros/. En
realidad, el movimiento de la#o no es nunca despreciable2 ya que para una curva de
radio 3IBm con un bogie con un empate de 3.I m, el ángulo ala representa 1.5O.
7ara una curva de radio 1BBm en las mismas condiciones presenta un ángulo de
la#o de 1.KO.
En la resoluci$n de este problema, se supondrán los periles de ruedas y carriles
como un con"unto de cDsplines cuya ecuaci$n gen!rica es la siguiente&
Z ( y )= A+By+C y2+ D y
3
Cbteniendo los siguientes parámetros& , y, N, L.
El m!todo de cálculo se basa en la adopci$n de m!todos de análisis num!rico para
la resoluci$n de la ecuaci$n mediante sucesivas iteraciones.
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 10/27
1*
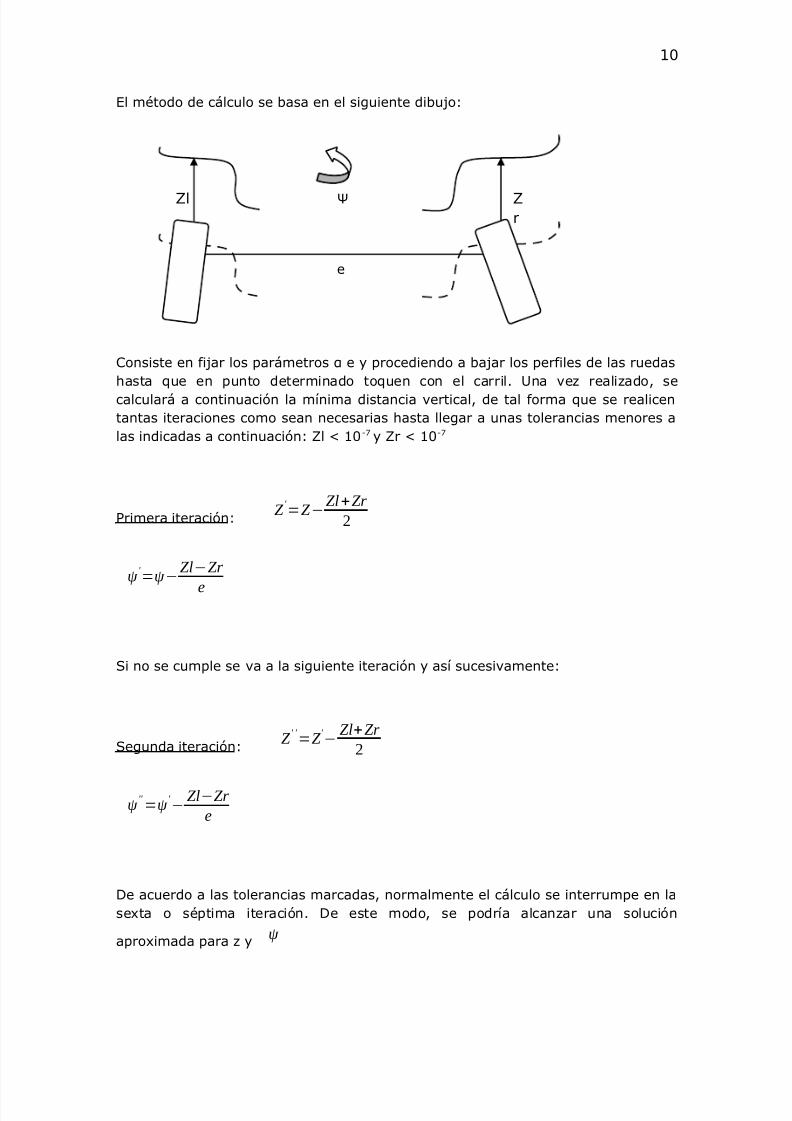
El m!todo de cálculo se basa en el siguiente dibu"o&
*onsiste en i"ar los parámetros N e y procediendo a ba"ar los periles de las ruedas
0asta que en punto determinado toquen con el carril. -na ve# reali#ado, se
calculará a continuaci$n la mínima distancia vertical, de tal orma que se realicen
tantas iteraciones como sean necesarias 0asta llegar a unas tolerancias menores a
las indicadas a continuaci$n& l P 1BDK y r P 1BDK
7rimera iteraci$n&Z
' =Z −
Zl+Zr
2
ψ ' =ψ −
Zl−Zr
e
(i no se cumple se va a la siguiente iteraci$n y así sucesivamente&
(egunda iteraci$n&Z
' ' =Z
' −
Zl+Zr
2
ψ '' =ψ
' −Zl−Zr
e
;e acuerdo a las tolerancias marcadas, normalmente el cálculo se interrumpe en la
sexta o s!ptima iteraci$n. ;e este modo, se podría alcan#ar una soluci$n
aproximada para # yψ
L Zr
Zl
e
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 11/27
11
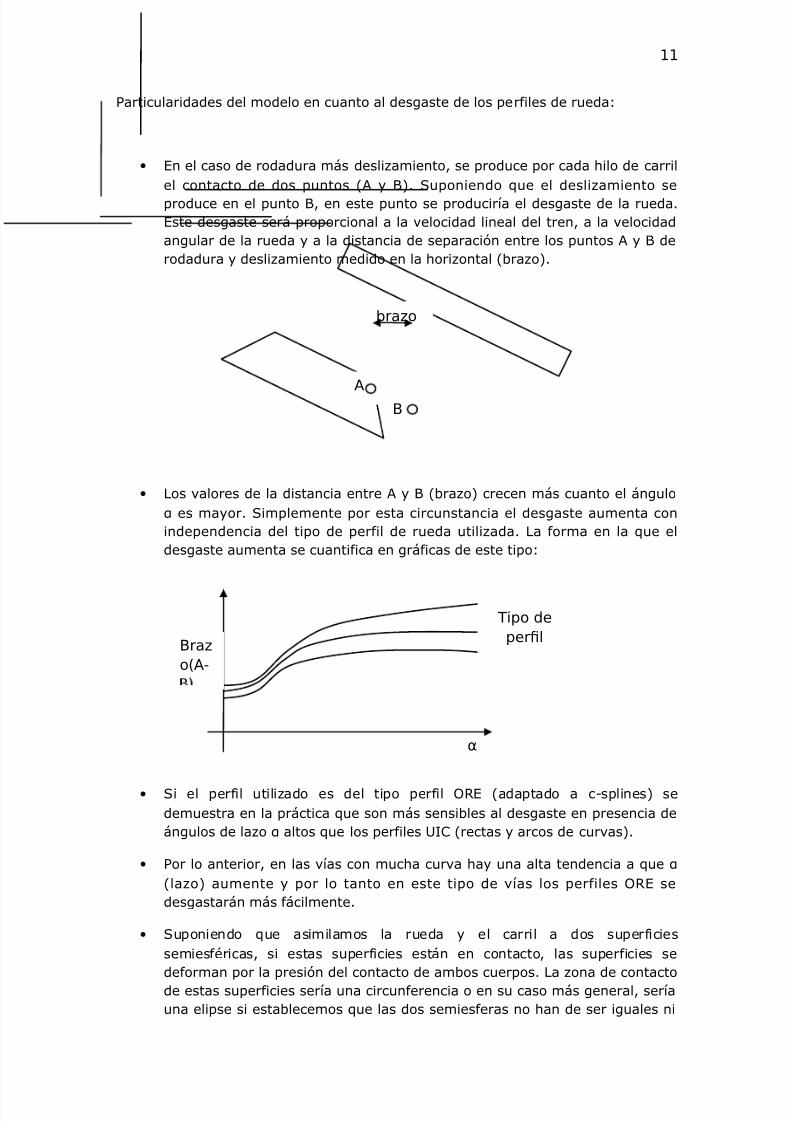
7articularidades del modelo en cuanto al desgaste de los periles de rueda&
• En el caso de rodadura más desli#amiento, se produce por cada 0ilo de carril
el contacto de dos puntos % y 9/. (uponiendo que el desli#amiento se
produce en el punto 9, en este punto se produciría el desgaste de la rueda.
Este desgaste será proporcional a la velocidad lineal del tren, a la velocidad
angular de la rueda y a la distancia de separaci$n entre los puntos % y 9 de
rodadura y desli#amiento medido en la 0ori#ontal bra#o/.
• 'os valores de la distancia entre % y 9 bra#o/ crecen más cuanto el ángulo
N es mayor. (implemente por esta circunstancia el desgaste aumenta con
independencia del tipo de peril de rueda utili#ada. 'a orma en la que el
desgaste aumenta se cuantiica en gráicas de este tipo&
• (i el peril utili#ado es del tipo peril C:E adaptado a cDsplines/ se
demuestra en la práctica que son más sensibles al desgaste en presencia de
ángulos de la#o N altos que los periles ->* rectas y arcos de curvas/.
• 7or lo anterior, en las vías con muc0a curva 0ay una alta tendencia a que N
la#o/ aumente y por lo tanto en este tipo de vías los periles C:E se
desgastarán más ácilmente.
• (uponiendo que asimilamos la rueda y el carril a dos supericies
semies!ricas, si estas supericies están en contacto, las supericies se
deorman por la presi$n del contacto de ambos cuerpos. 'a #ona de contacto
de estas supericies sería una circunerencia o en su caso más general, sería
una elipse si establecemos que las dos semieseras no 0an de ser iguales ni
braEo
+ ,
Fipo deper!l
,raEo9+G
α

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 12/27
12
sim!tricas. 'a delimitaci$n de esta elipse de contacto se reali#a mediante la
teoría de contacto de =ert#. Esta #ona de contacto se estudia mediante esta
teoría y da lugar a una elipse de contacto que varía de un modo
impredecible ya que el contacto es imperecto entre los dos cuerpos. ;ebido
al contacto se produce un pseudodesli#amiento denominado creepage. Este
creepage es un en$meno que se produce anterior al desli#amiento.

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 13/27
13
Tema 3BD Estabilidad dinámica en recta >/
1- ,enómeno de la estailidad din'mica de la marc.a
Tomando en consideraci$n lo visto en el tema 18, se va a proceder a reali#ar un
estudio especíico del parámetro ala la#o/. Este estudio pretende&
• ;emostrar la inestabilidad del e"e en movimiento
• ;emostrar que el parámetro ala es independiente del resto
• ;emostrar la existencia de un movimiento independiente del resto
denominado movimiento de la#o basado en la variaci$n del ángulo ala
2- /inem'tica del e0e montado en rodadura lire& Moimiento de
lao& cuación de lingel
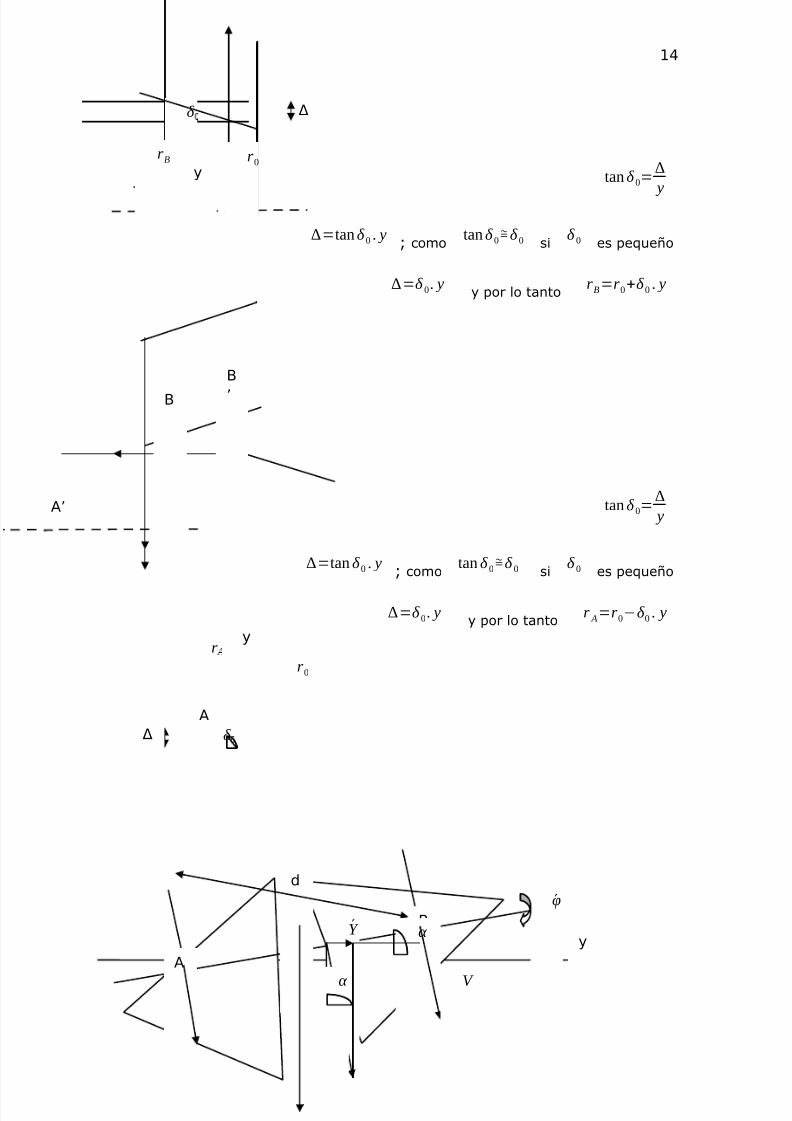
(e parte del modelo de representaci$n de una rueda erroviaria en base a un
bicono. (e estudia la variaci$n de dic0o bicono si se altera su posici$n despla#ando
una distancia y. %sí&
E
r0
r0
δ
,H
+H
E
rB
,+ r
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 14/27
I
+H
14
tan δ 0=
∆
y
∆=tan δ 0
. y2 como
tan δ 0≅δ
0 si δ
0 es peque<o
∆=δ 0
. y y por lo tanto rB=r0+δ
0. y
tan δ 0=
∆
y
∆=tan δ 0
. y2 como
tan δ 0≅δ
0 si δ
0 es peque<o
∆=δ 0
. y y por lo tanto r A=r0−δ
0. y
δ
r0
rB
,
H,
r
r0
+δ I
dφ
Y ,α
+
α V

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 15/27
1%
(e calcularán las velocidades relativas en los puntos % y 9 de contacto rueda –carril como&
V A=r A φ J V A=(r0−δ
0 y ) φ
V B=rB φ J V B=(r0+δ
0 y ) φ
*on las velocidades en los puntos % y 9 se calculará la velocidad de rodadura en el
centro del bicono como la media de las velocidades de rodadura en los puntos de
contacto rueda – carril&
V =V A+V B
2=
r0
φ−δ 0 y φ+r
0φ+δ
0 y φ
2=
2 r0
φ
2=r
0φ
'a velocidad F del centro del bicono se descompondrá en los e"es x e y
´ X =V cos α 2 Y =V sinα
comocosα
ysinα
son peque<os se puede simpliicarcosα ≅1
y
sinα ≅α quedando las expresiones como&
´ X ≅V 2 Y ≅Vα 415
(e toma la velocidad angular del movimiento de la#o como&
V
´ X V
K

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 16/27
16
α =V A−V B
2d =
r0
φ−δ 0 y φ−r
0φ−δ
0 y φ
2d =
−2δ 0 y φ
2d =
−δ 0 y φ
d
*omoV =r
0φ
entoncesφ=
V
r0
y sustituyendo en la expresi$n anterior&
α =−δ
0 y φ
d =
−δ 0 yV
r0 d 425
Tomando 415α =
yV 2 y reali#ando las derivadas
α =
dy
dt
dx
dt
=dy
dx si se vuelve a
derivar una segunda ve# toda la ecuaci$n con respecto a xdα
dx=
d2 y
dx2 435
Tomando 425 α
V =−δ
0 y
r0 d 2 y reali#ando las derivadas
dα
dt
dx
dt
=−δ
0 y
r0
d 2
dα
dx=−δ
0 y
r0 d 4$5
(i introducimos la expresi$n 435 en 4$5 se obtiene la siguiente igualdad&
d2 y
dx2 =−δ
0 y
r0 d ;
d2 y
dx2 +
δ 0 y
r 0d =0
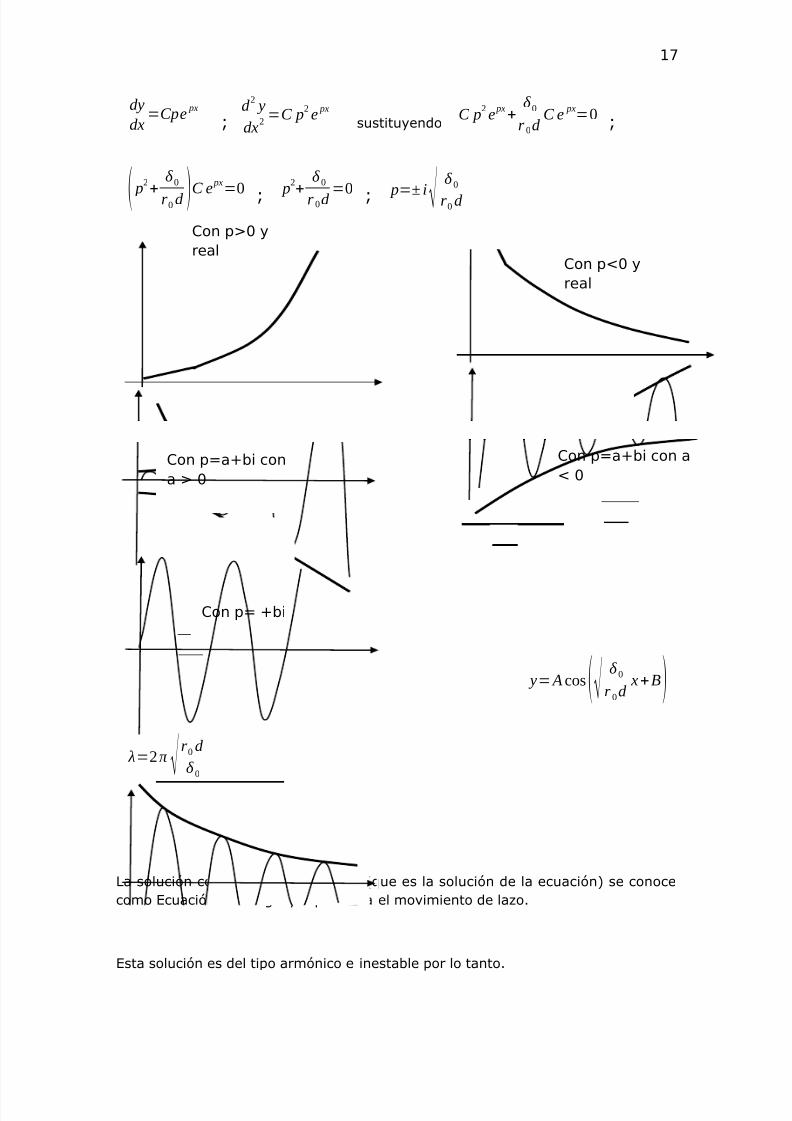
'as soluciones de esta ecuaci$n son del tipo& y=C e px
* y p son valores.
(i se introduce esta soluci$n en la ecuaci$n anterior, se podrá deducir el siguiente
comportamiento de la ecuaci$n sobre los valores de p.
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 17/27
1
dy
dx=Cpe
px
2d
2 y
dx2 =C p
2e
px
sustituyendo C p
2e
px+
δ 0
r 0d C e
px=0
2
( p
2+
δ 0
r0 d
)C e
px=0
2 p
2
+
δ 0
r 0d =0
2 p=± i
√
δ 0
r0 d
y= A cos(√ δ
0
r0
d x+B)
λ=2 √r0
d
δ 0
'a soluci$n concreta para este caso que es la soluci$n de la ecuaci$n/ se conoce
como Ecuaci$n de 4lingel y representa el movimiento de la#o.
Esta soluci$n es del tipo arm$nico e inestable por lo tanto.
$on p* real
$on pM* real
$on p(aNbi .on aM *
$on p(aNbi .ona *
$on p( Nbi
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 18/27
1)
Tema 31D Estabilidad dinámica en recta >>/
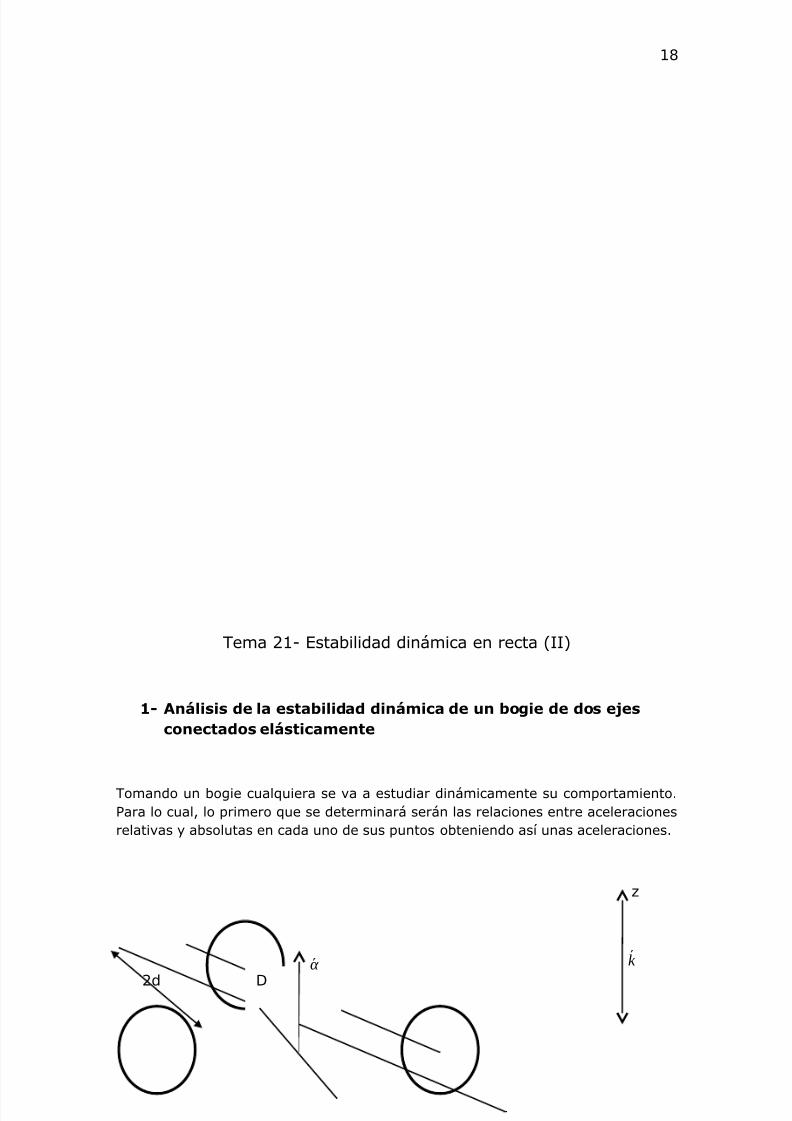
1- #n'lisis de la estailidad din'mica de un ogie de dos e0es
conectados el'sticamente
Tomando un bogie cualquiera se va a estudiar dinámicamente su comportamiento.
7ara lo cual, lo primero que se determinará serán las relaciones entre aceleraciones
relativas y absolutas en cada uno de sus puntos obteniendo así unas aceleraciones.
E
! α
2d -
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 19/27
1D
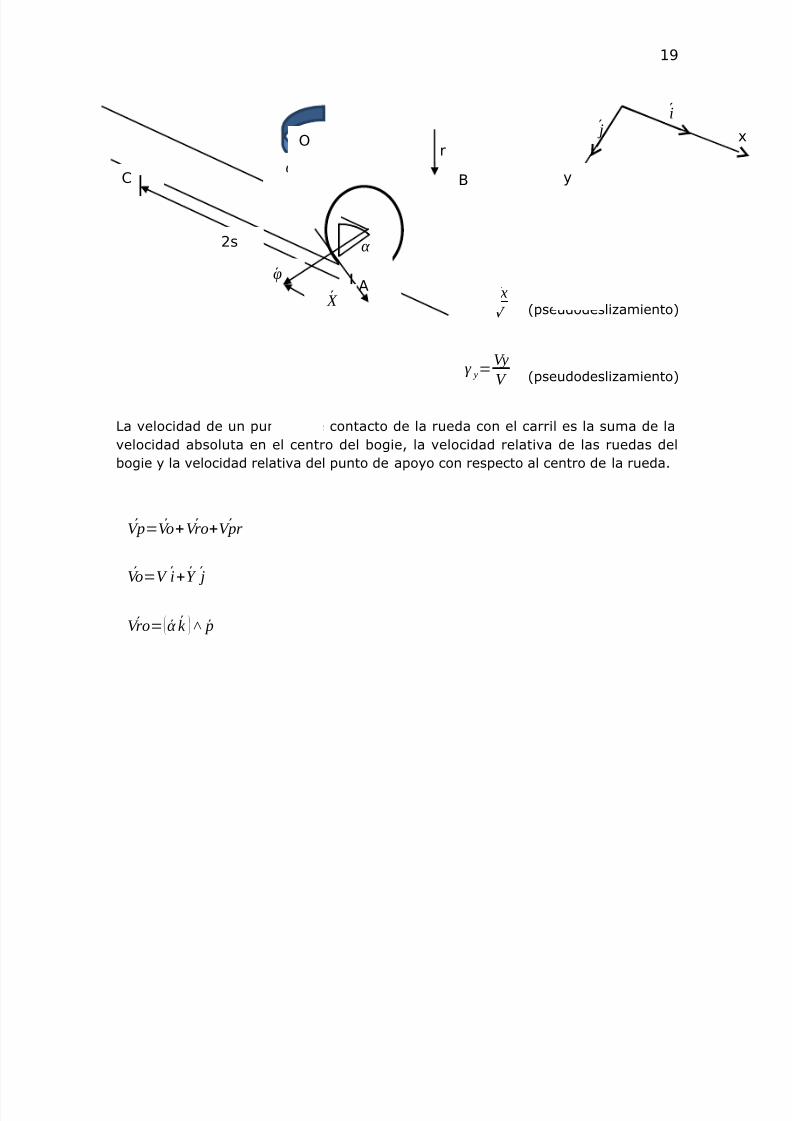
" x=Vx
V pseudodesli#amiento/
" y=Vy
V pseudodesli#amiento/
'a velocidad de un punto 7 de contacto de la rueda con el carril es la suma de la
velocidad absoluta en el centro del bogie, la velocidad relativa de las ruedas del
bogie y la velocidad relativa del punto de apoyo con respecto al centro de la rueda.
Vp= V#+ Vr#+ ´Vpr
V#=V i+Y $
Vr#=(α ! )˄ ´ p
K $i
rα
C
,$
α
Y
φ+
2s
´ X
8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 20/27
2*
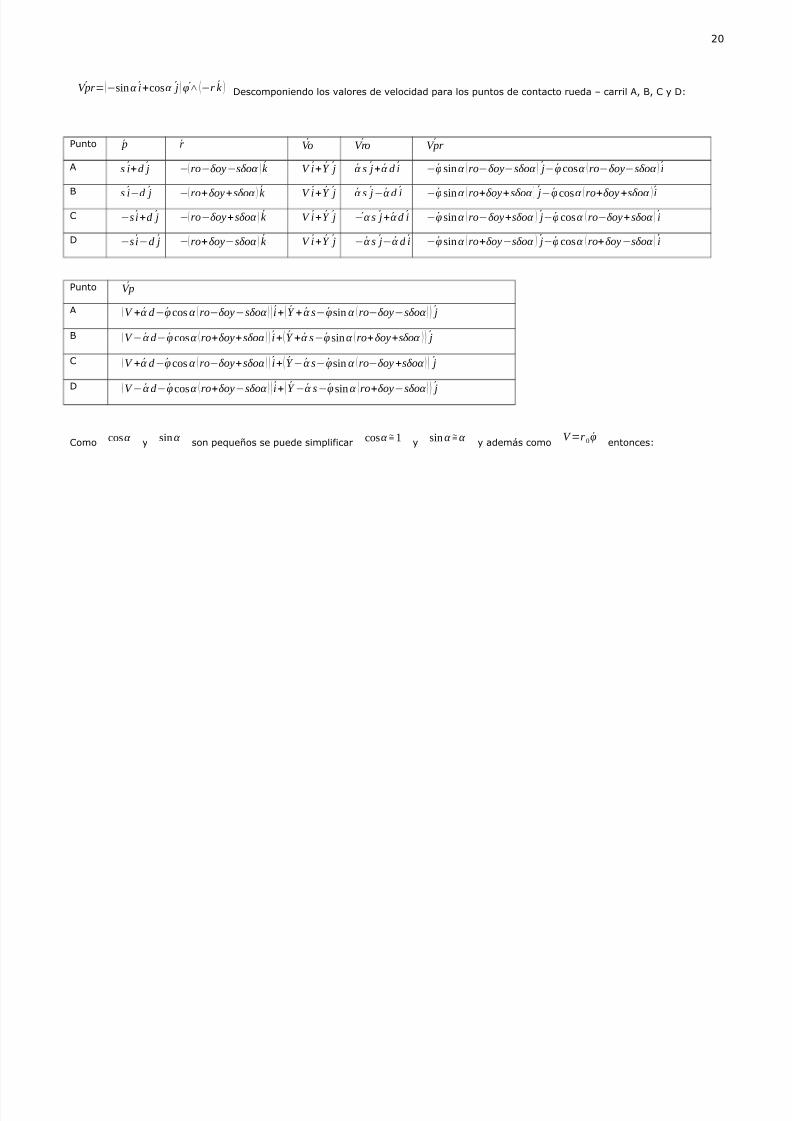
´Vpr=(−sinα i+cosα $ ) φ˄ (−r ! ) ;escomponiendo los valores de velocidad para los puntos de contacto rueda – carril %, 9, * y ;&
7unto ´ p r V# Vr# ´Vpr
% % i+d $ −(r#−δ#y−%δ#α ) ! V i+ Y $ α % $+α d i −φ sinα (r#−δ#y−%δ#α ) $−φ cosα (r#−δ#y−%δ#α ) i
9 % i−d $ −(r#+δ#y+%δ#α )´! V i+ Y $ α % $−α d i −φ sinα (r#+δ#y+%δ#α )
´ $−φcosα (r#+δ#y+%δ#α )
´i
* −% i+d $ −(r#−δ#y+%δ#α ) ! V i+ Y $ −α % $+α d i −φ sinα (r#−δ#y+%δ#α ) $−φ cosα (r#−δ#y+%δ#α ) i
; −% i−d $ −(r#+δ#y−%δ#α ) ! V i+ Y $ −α % $−α d i −φ sinα (r#+δ#y−%δ#α ) $−φ cosα (r#+δ#y−%δ#α ) i
7unto Vp
% (V +α d−φcosα (r#−δ#y−%δ#α ) ) i+( Y + α %−φsin α (r#−δ#y−%δ#α ) ) $
9 (V − α d−φcosα (r#+δ#y+%δ#α ) ) i+(Y +α %−φ sinα (r#+δ#y+%δ#α ) ) $
* (V +α d−φcosα (r#−δ#y+%δ#α ) ) i+(Y −α %−φsin α (r#−δ#y+%δ#α ) ) $
;
(V −α d−φcosα (r#+δ#y−%δ#α ) )´i+(
´Y −α %−φ sinα (r#+δ#y−%δ#α ) )
´ $
*omo cosα y sinα son peque<os se puede simpliicar cosα ≅1 y sinα ≅α y además comoV =r
0φ
entonces&

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 21/27
21
" Ax=Vx
V =
V + α d−φr#+ φδ#y+φ %δ#α
V =
α d
V +
δ#
r# y+
δ#
r# %α
" Ay=Vy
V =
Y + α %− φαr#+ φα δ#y+ φα %δ#α
V =
Y
V +
α %
V −α
" Bx=Vx
V
=V −α d−φ r#−φδ#y−φ%δ#α
V
=−α d
V
−δ#
r#
y−δ#
r#
%α
" By=Vy
V =
Y + α %−φαr#− φα δ#y− φα %δ#α
V =
Y
V +
α %
V −α
" Cx=Vx
V =
V +α d−φ r#+φδ#y−φ %δ#α
V =
α d
V +
δ#
r# y−
δ#
r# %α
" Cy=Vy
V =
Y −α %−φαr#+ φα δ#y− φα %δ#α
V =
Y
V −
α %
V −α
" Dx=Vx
V =
V −α d−φ r#−φδ#y+ φ%δ#α
V =
−α d
V −
δ#
r# y+
δ#
r# %α
" Dy=Vy
V =
Y −α %−φαr#− φα δ#y+ φα %δ#α
V =
Y
V − α %
V −α

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 22/27
22
(e calcularán las uer#as ?%x, ?%y, ?9x, ?9y, ?*x, ?*y, ?;x, ?;y como &x=−C"x
y &y=−C"y
. (e comprueba que ?%x D ?9x
?%y ?9y2 ?*x D ?;x2 ?*y ?;y / es el coe*iciente de /ree)age/

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 23/27
23
& Ax=−C α d
V −C
δ#
r# y−C
δ#
r# %α
& Ay=−C Y
V
−C α %
V
+Cα
& Bx=C α d
V +C
δ#
r# y+C
δ#
r# %α
& By=−C Y
V −C
α %
V +Cα
& Cx=−C α d
V
−C δ#
r#
y+C δ#
r#
%α
& Cy=−C Y
V +C
α %
V +Cα
& Dx=C α d
V +C
δ#
r# y−C
δ#
r# %α
& Dy=−
C
Y
V +
C
α %
V +
Cα
(e procederá a reali#ar la suma de uer#as en los e"es x e y igualando al valor de la
masa por su aceleraci$n en su respectivo e"e segunda ley de eQton/.
∑ &x= ´ x
& Ax+ & Bx+ & Cx+ & Dx= ´ x
2
− & B x+ & B x− & D x+ & Dx= x
2
0= ' x
2
0=´ x
∑ &y= y
& Ay+ & By+ & Cy+ & Dy= y 2
& B y+ & By+ & C y+ & D y= ´ y 2
2 & B y+2 & C y= ´ y

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 24/27
24
2(−C Y
V −C
α %
V +Cα )+2(−C
Y
V +C
α %
V +Cα )= ´ y 2 −4C
Y
V + 4Cα = ´ y 2
´ y+4C Y
V −4Cα =0
415
(e aplicará a continuaci$n el teorema de los momentos&
∑ #= ( α
( & Ax− & B x ) d+ ( & C x− & Dx ) d+( & A y+ & B y) %−( & C y+ & D y ) %= ( α 2
2( & Ax+ & C x ) d+2 ( & A y− & C y ) %= ( α 2
2(−C α d
V −C
δ#
r# y−C
δ#
r# %α −C
α d
V −C
δ#
r# y+C
δ#
r# %α )d+2(−C
Y
V −C
α %
V +Cα +C
Y
V −C
α %
V −Cα ) %=
2(−2C α d
V −2C
δ#
r# y )d+2(−2C
α %
V )%= ( α
( α +4C α (%2
+d2 )
V +4Cdy
δ#
r#=0 425
'a soluci$n de estas dos ecuaciones se puede reali#ar en dos casos&
• Baja velocidad & (uponiendoα e ´ y con valor de B
General & (in reali#ar suposiciones
(1) y+4C
Y
V −4Cα =0
;4C
Y
V −4Cα =0
;
Y
V −α =0
435
(2) ( α +4C α (%2
+d2 )
V +4Cdy
δ#
r#=0 ; 4C α
(%2+d
2 )V
+4Cdy δ#
r#=0

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 25/27
2%
α
(%2
+d2 )
V +dy
δ#
r#=0 4$5
(ustituyendo 5/ en @/&
dy
dt
dx
dt
−α =02
dy
dx−α =0
2α =
dy
dx 2 ;erivando con respecto xdα
dx=
d2 y
dx2
dα
dt
dx
dt
(%2+d2 )+ δ#dy
r# =0
;
dα
dx ( %
2
+d2)+ δ#dy
r# =0
;
d2 y
dx2 ( %
2+d2 )+ δ#dy
r# =0
;
d2 y
dx2 +
δ#dy
r# ( %2+d
2 )=0 4(5
Esta es una ecuaci$n similar a la de 4lingel, por lo que sus soluciones son parecidas
a la de esta ecuaci$n.
λ=2 √r0
d
δ 0(1+ %
2
d2 ) 4+5
7ara resolver el caso general, sabiendo que en la soluci$n simpliicada es laecuaci$n de 4lingel, se ensaya con los siguientes valores particulares
introduci!ndolos en la ecuaci$n general.
y= A1 e pt
; ´ y= A1 pe
pt
; ´ y= A1 p
2e
pt
α = A2 e pt
; α = A2 pe
pt
; α = A2 p
2
e pt
A1 p
2e
pt +4 C
V
A1 pe
pt −4C A
2e
pt =¿
;
' A1 p
2+4C
V
A1 p−4 C A
2=0
K/
( A2 p
2
e pt +4C
V ( %
2
+d2 ) A
2 pe
pt +4Cδ#d
r# A
1 pe
pt =0
( A2 p
2
+4C
V (%2
+d2 ) A
2 p+
4Cδ#d
r# A
1 p=0
465
*on K/ y 8/ se puede obtener el polinomio característico del sistema

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 26/27
26
[ ' p2+4C
V p −4C
4Cδ#d
r# ( p
2
+4C
V ( %
2
+d2 ) p]=0
( p4+(
4C
)2
(d2+%2 )+ (
4 C
V ) p3+
16C 2
)2
(d2+%2 ) p2+
16C 2
δ#d
r# =0
*on el polinomio característico se aplica la regla de :out0 para conocer la
estabilidad de las raíces soluci$n de las ecuaciones.
A4 p4+ A3 p
3+ A2 p
2+ A1 p+ A0=0
%@ %3 %B
%5 %1
91 93
*1 *3
A4= (
A3=
(
4 C
)
2 ( d
2+%
2 )+ ( 4C
V
) A
2=
16C 2
)2
( d2+%
2 )
A1=0
A0=
16C 2
δ#d
r#
B1=
A3 A
2− A
4 A
1
A3
B2=
A3 A
0− A
40
A3
C 1=
B1 A
1− A
3B
2
B1
C 2=
B10− A
30
B1

8/18/2019 Estabilidad dinámica en recta
http://slidepdf.com/reader/full/estabilidad-dinamica-en-recta 27/27
2
(i los n)meros de la primera columna son todos positivos o todos negativos se
prueba que todas las raíces son estables. En este caso&
%@RB2 %5RB2 91RB y *1PB
(e deduce que la ecuaci$n dinámica del bogie es inestable. (i no existiera una
suspensi$n primaria, al ser inestable y al rodar por la vía, el sistema tendría
tendencia al descarrilo.