Embed Size (px)
Citation preview
TRANSPORTATION RESEARCH BOARD
@NASEMTRB#TRBwebinar
Enhance Work Zone Safety with New Technologies
July 9, 2020

The Transportation Research Board
has met the standards and
requirements of the Registered
Continuing Education Providers
Program. Credit earned on completion
of this program will be reported to
RCEP. A certificate of completion will
be issued to participants that have
registered and attended the entire
session. As such, it does not include
content that may be deemed or
construed to be an approval or
endorsement by RCEP.
PDH Certification Information:
•1.5 Professional Development Hours (PDH) – see follow-up email for instructions•You must attend the entire webinar to be eligible to receive PDH credits•Questions? Contact Reggie Gillum at [email protected]
#TRBwebinar

Learning Objectives
#TRBwebinar
1. List current technologies to mitigate work zone intrusion
2. Discuss how ATMA may help minimize work zone injuries
3. Discuss the potential role of AI in improving work zone safety
Work Zone Safety and How to Use Technologies to Mitigate Work
Zone IntrusionJuly 9, 2020
2:00 – 3:30 PM Eastern

Today’s SpeakersSpeaker Topic
Tim Luttrell, P.E., Leidos Welcome and Background
John LormeDirector of Maintenance and Operations, Colorado DOT
CDOT’s Autonomous Truck Mounted Attenuator (ATMA) Program
Xianbiao (XB) Hu, Ph.D. Assistant Professor, Missouri University of Science and Technology (Missouri Rolla)
Field Testing and Evaluation of Autonomous Maintenance Technology System
John Gambatese, Ph.D., P.E.Professor, Civil EngineeringOregon State University
Examples of Recent and Ongoing Research
Hamed Tabkhi, Ph.D.Assistant Professor, Electrical and Computer EngineeringUNC Charlotte
Worker-in-the-loop real time safety system for short-duration highway work zones
2
Poll Question
Help us learn more about you…
3
Welcome
• The webinar is 90-minutes in length• Type in your questions in the chat pod• We will answer all questions at the end• The slide deck is posted in download pod• This webinar is being recorded• A link to the recording will be available
4

Background
5
Source: workzonesafety.org
• 2018: 754 work zone fatalities in the US
• More than 15% are workers• National focus on positive
protection and requirements (TTC Devices Rule)
• Innovative applications

CDOT’s Autonomous Truck Mounted Attenuator (ATMA) Program
6
John LormeDirector of Maintenance and OperationsColorado Department of Transportation

Agenda
• Program Overview and Goals
• Deployment in Colorado
• Autonomous Maintenance Pool Fund
• Questions/Discussion
July 9, 2020 7

Program Goals: What is a truck mounted attenuator and why does a DOT use it?
• Remove driver from the maintenance truck
• Decrease risk of operations
• Increase efficiency of operations
• Pursue cutting-edge technology to improve highway management
8
TMA to protect the workers in the
back of the paint truck
Paint striping vehicle (moving
very slowly – 7 -10 mph on the
highway

CDOT ATMA Goals and Timeline
July 9, 2020 9
January 2020
Request to move into Phase 2
Fall 2019
CDOT ATMA
receives hardware
and software upgrade
August 2019
CDOT provided deployment status to date
June 2018
CDOT deploys
on public roadway
May 2018
Autonomous Mobility Task
Force Approved
CDOT’s request
Summer 2017
CDOT complete
s validation
testing and
operator training
Oct 2017
CDOT submitte
d a request for the ATMA
CDOT Program Goals 1. Installation2. Evaluation 3. Operational4. Versatility5. Statewide expansion
Developing a community of practice –Autonomous Maintenance Technology Pool Fund
10
Autonomous Maintenance Technology Pool Fund TPF-5(380)
“To develop and deploy ATMA or AIPVs to protect highway workers lives by enhancing cooperative inter-agency research that improves the safety and effectiveness of ATMA or AIPV
operations, and to facilitate communication between transportation agencies that encounter challenges with
implementation.”
Participating DOTs: Kansas, Colorado, Minnesota, Illinois, Nevada, California, Washington, Texas, Virginia, Ohio, Alabama, Oklahoma

11
Questions/Discussion
Feel free to reach out for more information regarding CDOT’s ATMA Program or the AMT
Pool Fund!
Thank you!
John Lorme, D i rector, D iv i s ion of Ma intenance and Operat ions
Ty ler Weldon, PE, H ighway Maintenance Eng ineerDiv i s ion of H ighway Maintenance
Ash ley Ny len, PMPAss i s tant D i rector of Mobi l i ty Technology, Of f ice of Innovat ive
Mobi l i tyAshley.ny [email protected]

Field Testing and Evaluation of Autonomous Maintenance Technology System
12
Xianbiao(XB) Hu, PhD Assistant ProfessorMissouri University of Science and Technology (Missouri Rolla)Email: [email protected]

Acknowledgement
Missouri DOT: Chris Redline, Jimmy Shannon, Jen Harper
Colorado DOT: Tyler Weldon, Ashley Nylen, David Reeves
AMT Pool Fund: 12 State DOT
Kratos (MicroSystem): Maynard Factor
USDOT Mid-America Transportation Center, National Center
for Transportation Infrastructure Durability and Life-Extension
Missouri S&T: Qing Tang, Yanqiu Cheng
13
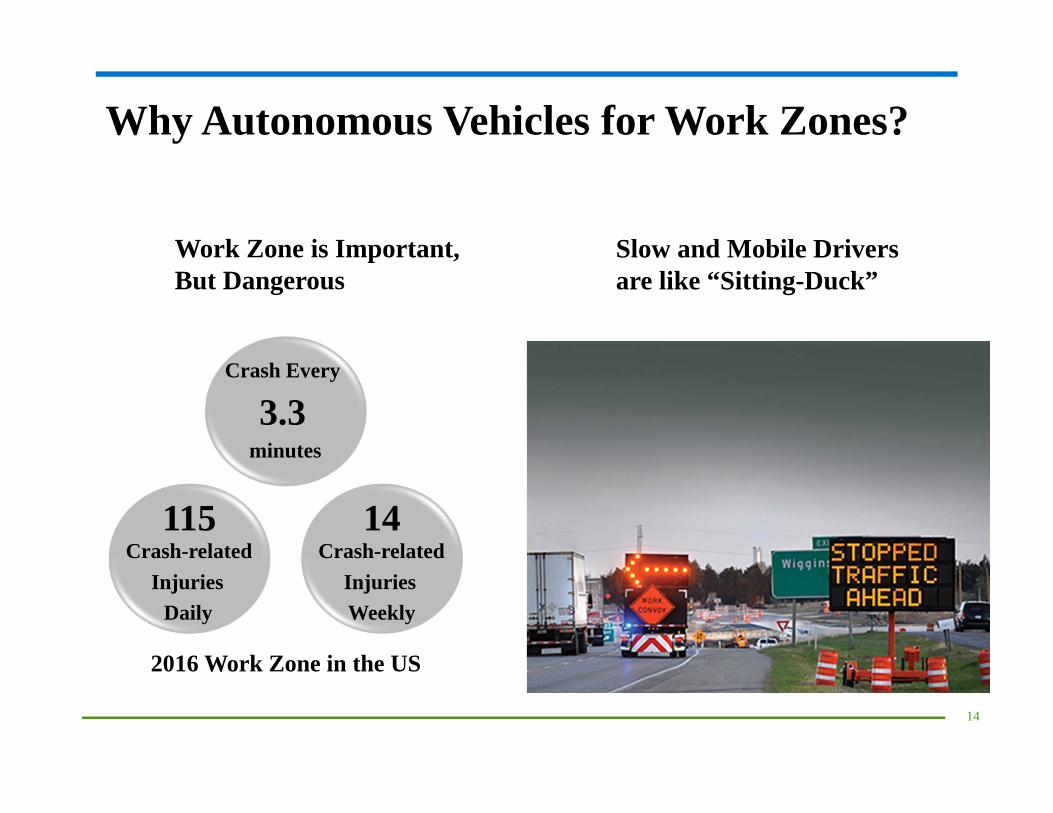
Why Autonomous Vehicles for Work Zones?
14
Slow and Mobile Drivers are like “Sitting-Duck”
2016 Work Zone in the US
Crash Every
3.3minutes
115Crash-related
InjuriesDaily
14Crash-related
InjuriesWeekly
Work Zone is Important, But Dangerous

How to Protect Lives of DOT Employees?
15
– Lead-Follower Autonomous
Traffic Mounted
Attenuator System (ATMA) • One leader truck and one
follower truck
• Follower truck equipped with
Truck Mounted Attenuator
(TMA)
• Follower truck to drive
autonomously and thus
remove drivers
Our Progress Overview
ATMA system testing and evaluation
Review of National Standards and Federal Policy
Truck & TMA delivery
Truck retrofit
System delivery
32-hour testing on controlled roadway
250-hour live work zone testing (in progress)
16
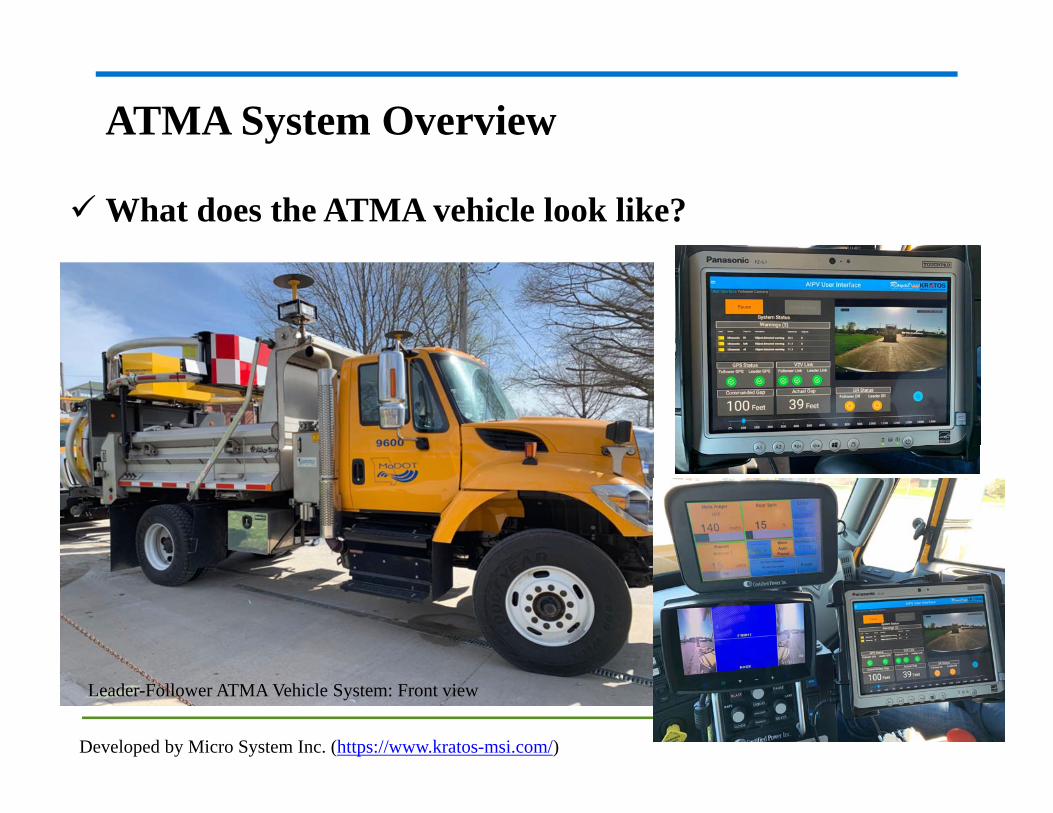
ATMA System Overview
17
What does the ATMA vehicle look like?
Leader-Follower ATMA Vehicle System: Front view
Developed by Micro System Inc. (https://www.kratos-msi.com/)
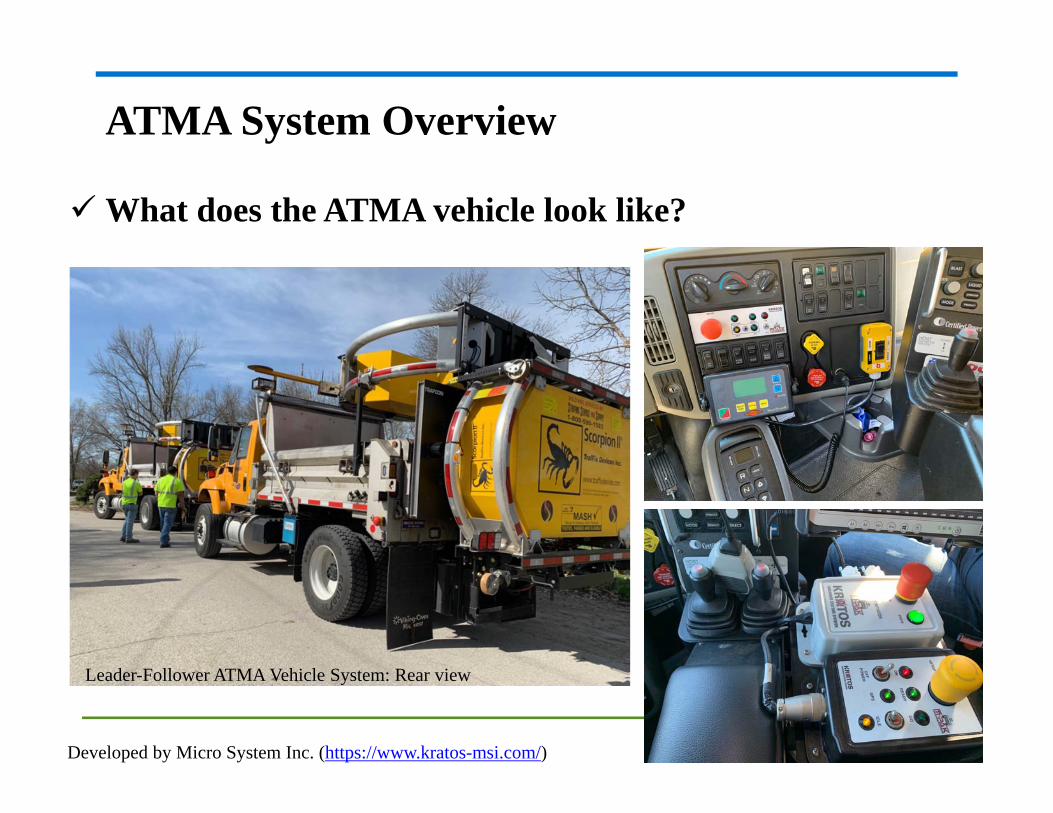
ATMA System Overview
18
Leader-Follower ATMA Vehicle System: Rear view
Developed by Micro System Inc. (https://www.kratos-msi.com/)
What does the ATMA vehicle look like?

ATMA System Overview
19
Velocity, heading and position information
Perform a maintenance operation
FTUnmanned
A NavigationComputer
LTHuman-driven
19
E-CRUMBSE-CRUMBSV2V V2V ATMA
How does the ATMA system work?
Follow precise position, speed and direction of the LT

ATMA System Overview
20
20
How does the ATMA system work?

Field Testing Overview
21
Test Cases (31)
1. Communication loss test
2. Following distance and accuracy test
3. Obstacle detection test
4. Emergency situations test
Expected result: function as expected and pass the pre-defined criteria
(Each test was repeated for 3 times) 21

Field Testing Overview
22
Test Data
1. Vehicle Operating Mode
2. Automatic Stop (A-Stop)
• A controlled stop and taken control by human operator
3. Emergency Stop (E-Stop)
• An error condition occurred or an “E-Stop” button was pressed
• Three types: External, internal and independent22
IDLE (start) ROLLOUT (initial state) RUN
Field Testing Overview
23
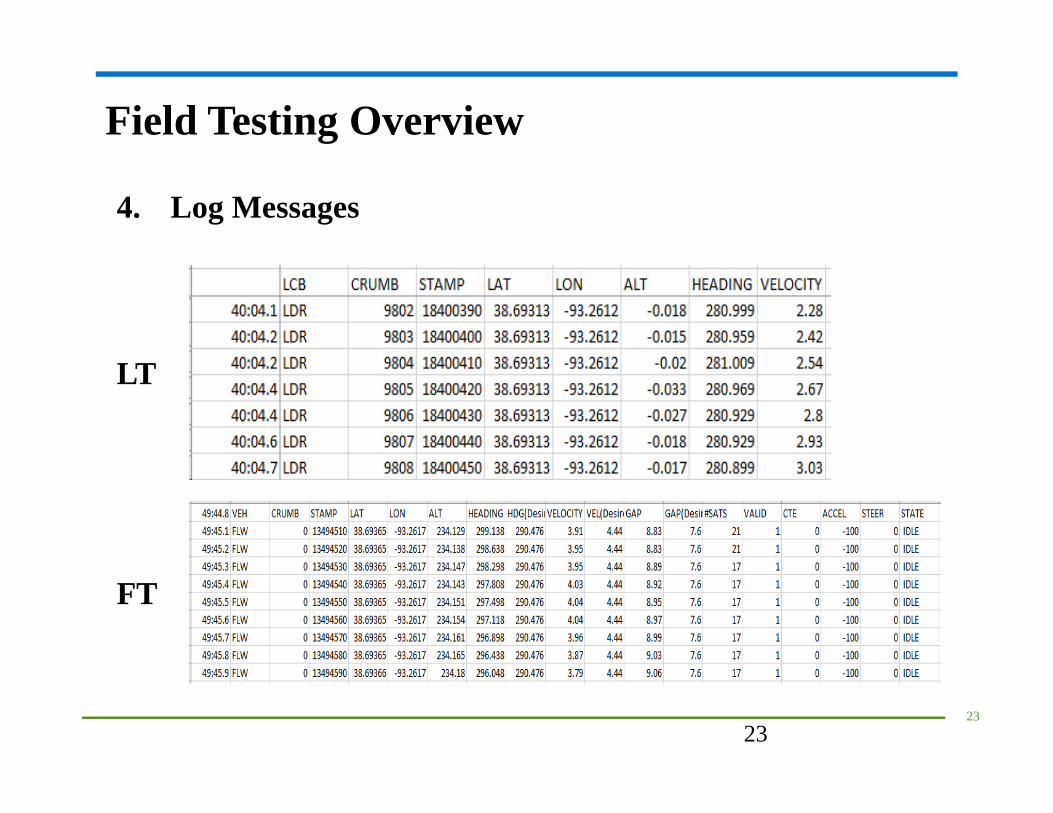
4. Log Messages
23
LT
FT
Methodology
24
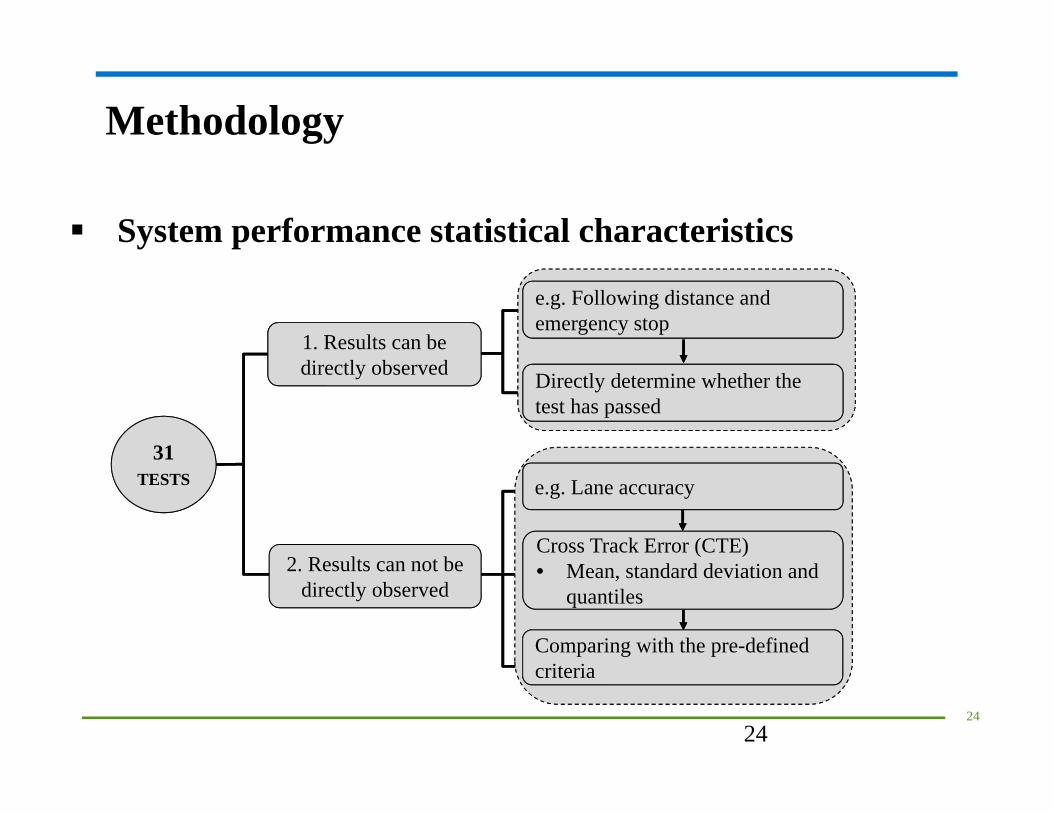
System performance statistical characteristics
24
31 TESTS
e.g. Following distance and emergency stop
Directly determine whether the test has passed
e.g. Lane accuracy
Cross Track Error (CTE)• Mean, standard deviation and
quantiles
Comparing with the pre-defined criteria
1. Results can be directly observed
2. Results can not be directly observed
Methodology
25
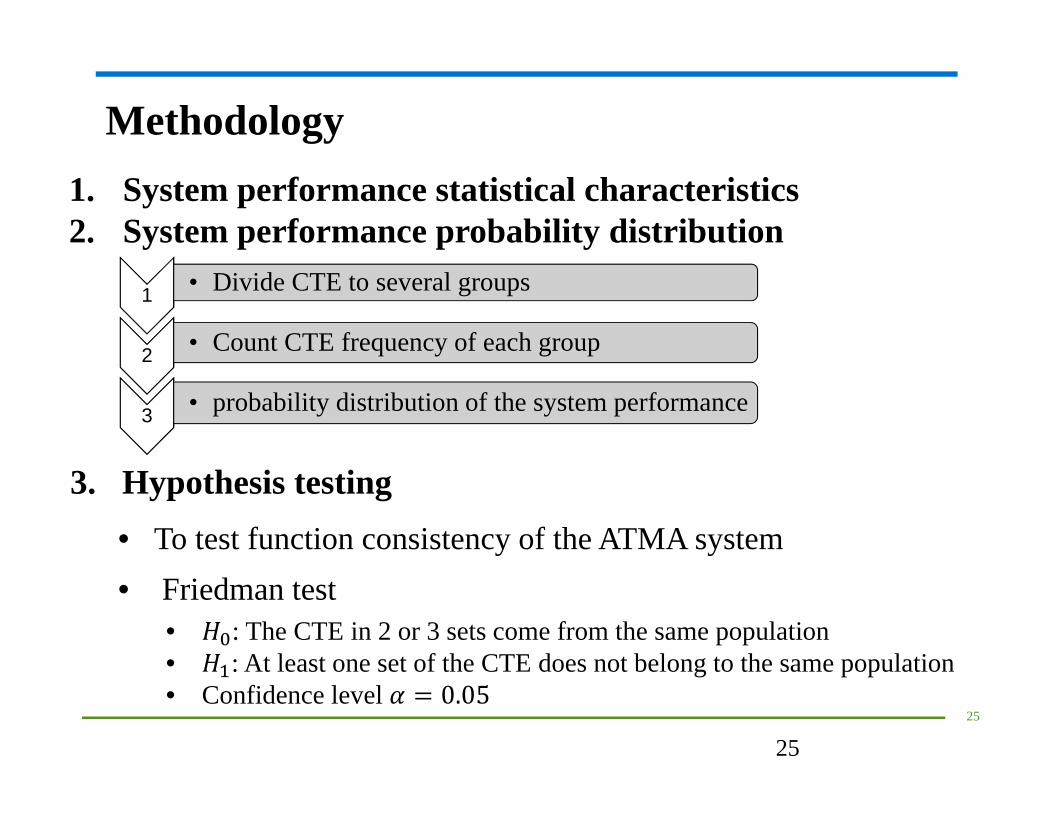
1. System performance statistical characteristics 2. System performance probability distribution
25
3. Hypothesis testing• To test function consistency of the ATMA system• Friedman test
• 𝐻 : The CTE in 2 or 3 sets come from the same population• 𝐻 : At least one set of the CTE does not belong to the same population• Confidence level 𝛼 0.05
11 • Divide CTE to several groups
22 • Count CTE frequency of each group
33 • probability distribution of the system performance
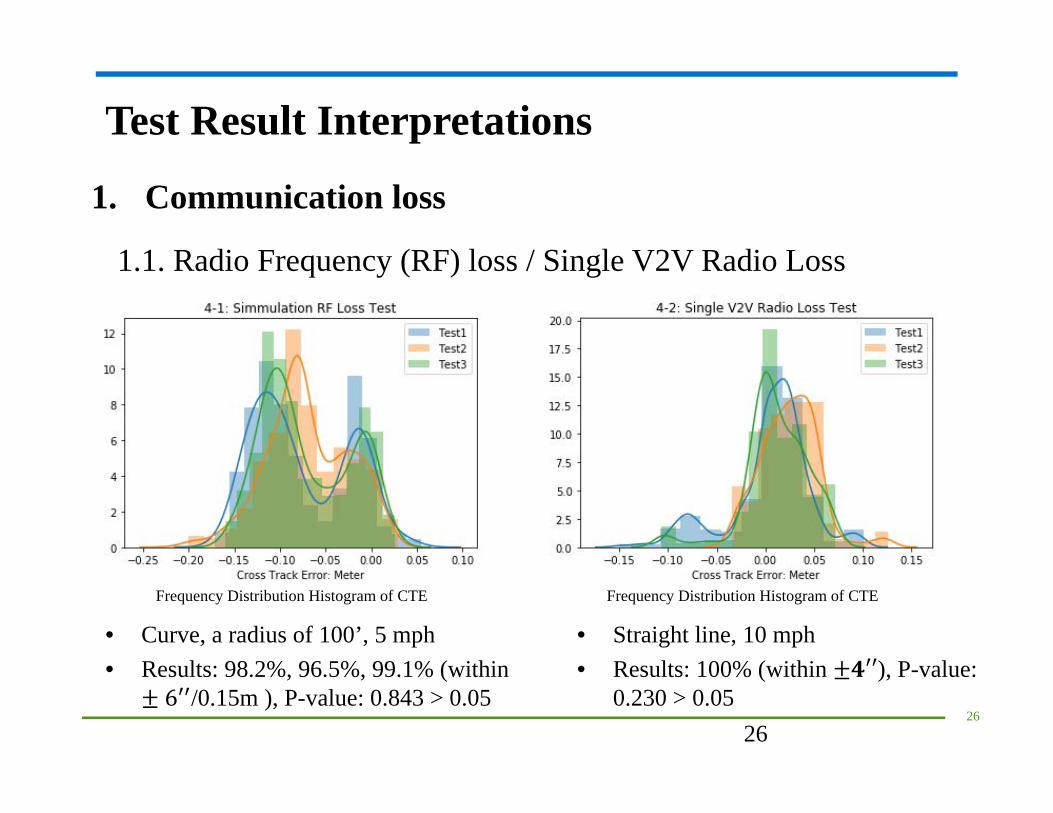
Test Result Interpretations
2626
1. Communication loss
1.1. Radio Frequency (RF) loss / Single V2V Radio Loss
Frequency Distribution Histogram of CTE
• Curve, a radius of 100’, 5 mph• Results: 98.2%, 96.5%, 99.1% (within
6 /0.15m ), P-value: 0.843 > 0.05
Frequency Distribution Histogram of CTE
• Straight line, 10 mph • Results: 100% (within 𝟒′′), P-value:
0.230 > 0.05
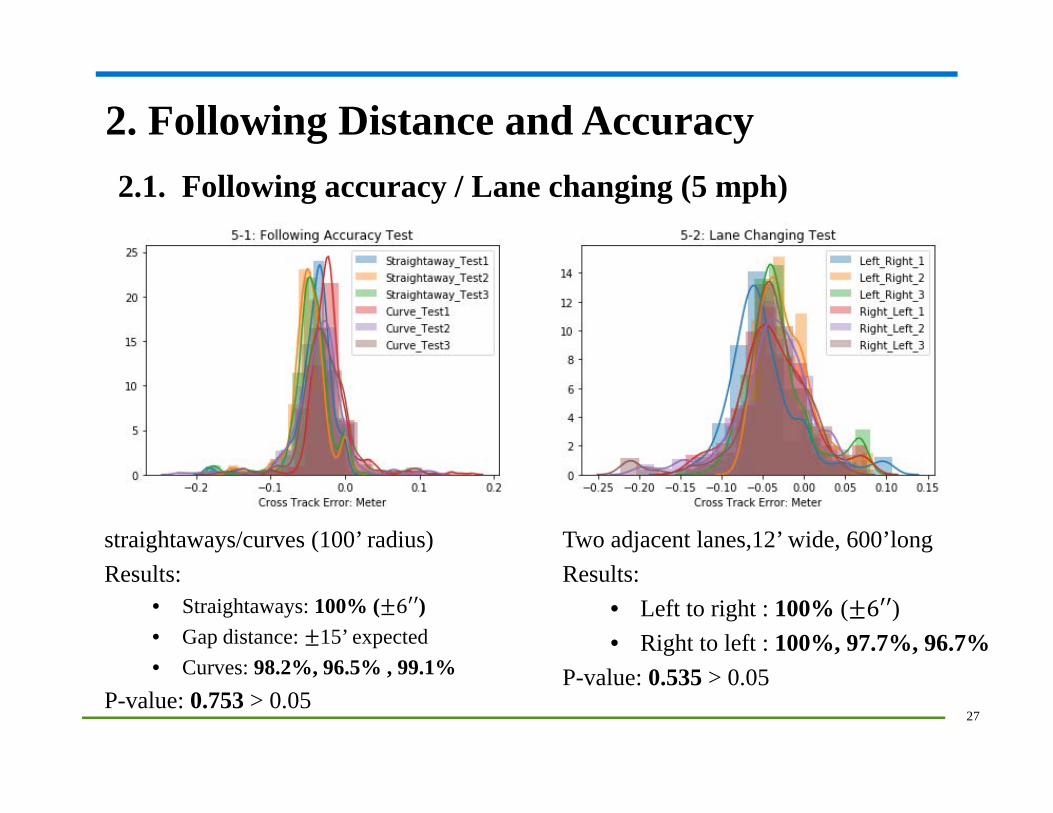
2. Following Distance and Accuracy
27
straightaways/curves (100’ radius)Results:
• Straightaways: 100% ( 6′′)• Gap distance: 15’ expected• Curves: 98.2%, 96.5% , 99.1%
P-value: 0.753 > 0.05
2.1. Following accuracy / Lane changing (5 mph)
Two adjacent lanes,12’ wide, 600’longResults:
• Left to right : 100% ( 6′′)• Right to left : 100%, 97.7%, 96.7%
P-value: 0.535 > 0.05
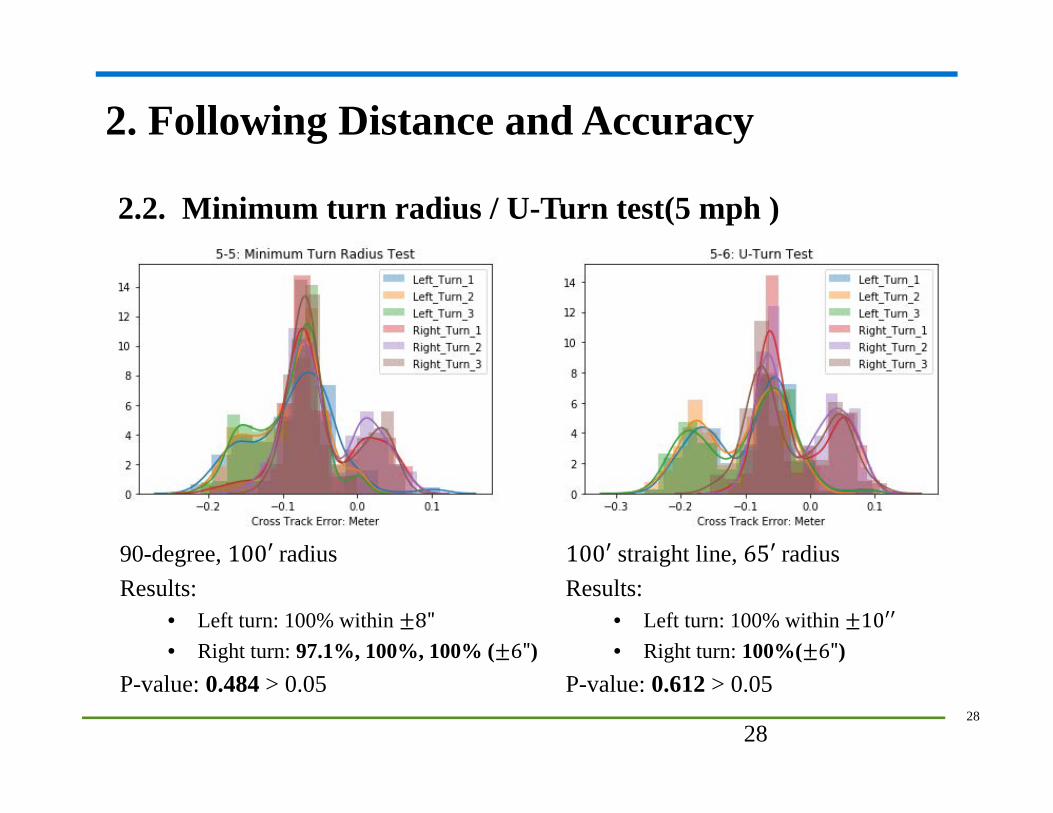
2. Following Distance and Accuracy
28
90-degree, 100′ radiusResults:
• Left turn: 100% within 8"• Right turn: 97.1%, 100%, 100% ( 6")
P-value: 0.484 > 0.05
28
2.2. Minimum turn radius / U-Turn test(5 mph )
100′ straight line, 65′ radiusResults:
• Left turn: 100% within 10′′• Right turn: 100%( 6")
P-value: 0.612 > 0.05

3. Obstacle Detection
2929
3.1. Front view collision avoidance
• Obstacle detection: a gap of 200′, 7.5 mph
• Side obstacle detection: a gap of 100 , 7 mph
• Expected result: FT detected the traffic barrel and executed an A-Stop
3.2. Side view obstacle detection - Object recognition
a gap of 100 , 7 mph
Expected result: Thea object was
displayed in the User Interface (UI).
3.3. Results: Passed

4. Emergency Situations
3030
4.1. Temporarily “Drop” ATMA vehicle (10 mph)
11 • UI: A pause command
22 • FT: A temporarily stop
33 • LT: kept driving to a gap distance of 200’
Expected Results:• FT catch up to the set gap
distance 100′ (30.48 m)• Catch-up speed 20 mph
Results: • Speed increased to 12 mph• Stabilized gap: 33.36 m, 34.65 m, 33.36 m• Actual distance errors: within 15′ (4.57 m)• Passed

4. Emergency Situations
3131
4.2. Emergency Stop Test the operator ability to emergency stop FT from LT Expected results: FT would stop The stop time and distance were recorded
Results: Passed
4.3. Braking LT (10 mph) A gap 100’ A driver engaged the brake instantly (LT) Expected results: Actual gap delta (actual gap - the gap after stopping )was
within 15 Results: Gap delta were 4′, 5′, 4′ (within 15′) Passed
4. Emergency Situations
32
4.4. ATMA operate by human driver (10 mph) Test the FT takeover capability FT was taken control by human driver after releasing to IDLE mode Results: FT quickly disengaged from the system Human driver took control the FT
4.5. Simulate rear impact (radar) Test brake and hazard light function upon impact Results: FT released the throttle, applied full brakes and turned on the
hazard lights
32
Other Work In Progress
1. ATMA operation domain? 1. Low volume road only (e.g. 3,000 AADT)? 2. The key is to identify impact of ATMA to traffic,
e.g. queue length, delay.2. ATMA deployment strategy
1. How many time and resources are need to maintain 100 miles?
2. In what sequence, at what time?3. ATMA systematic documentation
1. Initial exploring stage -> Testing stage -> Deployment stage -> Operation stage
33Thanks for the sponsorship from CDOT & USDOT through MATC and TriDurLE UTC

Examples of Recent and Ongoing Research
John Gambatese, Ph.D., P.E.Oregon State UniversitySchool of Civil and Construction Engineering
34

A Recent Headline
35TM&E online newsletter, http://www.traffictransit.com/, May 2, 2017.

Emerging Practices and Areas of Need
USDOT Research, Development, and Technology Strategic Plan, FY 2017-2021
1. Promote safety2. Improve mobility3. Improve infrastructure4. Preserve the environment
36
Suggested areas of focus related to work zones:• Human factors• Automation• Rapid construction and repair methods
• Intelligent transportation systems
• Connected vehicles and infrastructure
“DOT Five-Year RD&T Strategic Plan (FY 2017-2021),” USDOT, October 31, 2017.
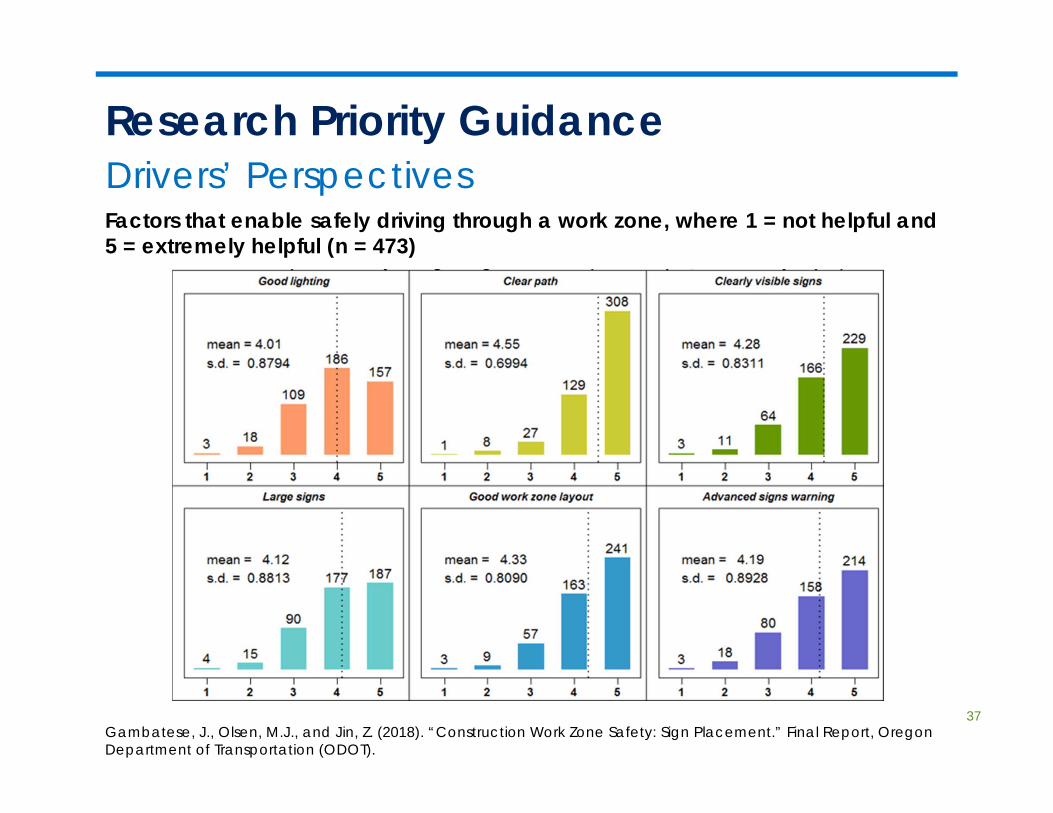
Research Priority GuidanceDrivers’ Perspectives
37
Factors that enable safely driving through a work zone, where 1 = not helpful and 5 = extremely helpful (n = 473)
Gambatese, J., Olsen, M.J., and Jin, Z. (2018). “Construction Work Zone Safety: Sign Placement.” Final Report, Oregon Department of Transportation (ODOT).
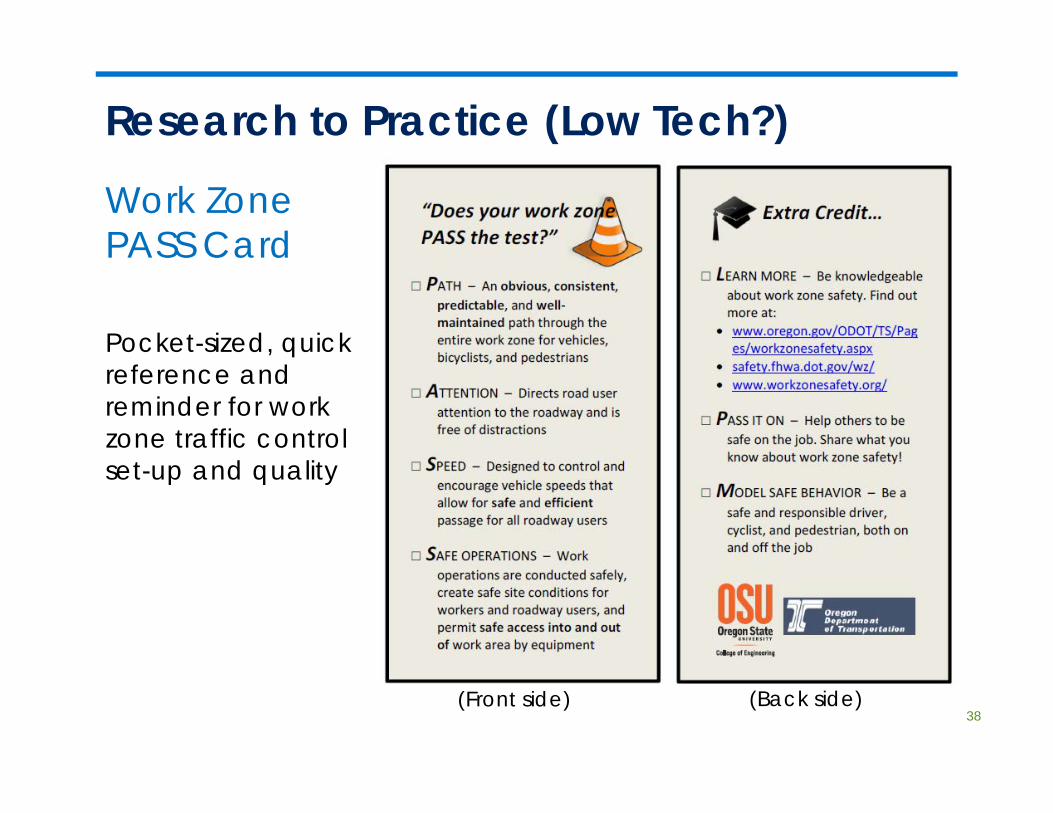
Research to Practice (Low Tech?)
Work Zone PASS Card
Pocket-sized, quick reference and reminder for work zone traffic control set-up and quality
38(Front side) (Back side)
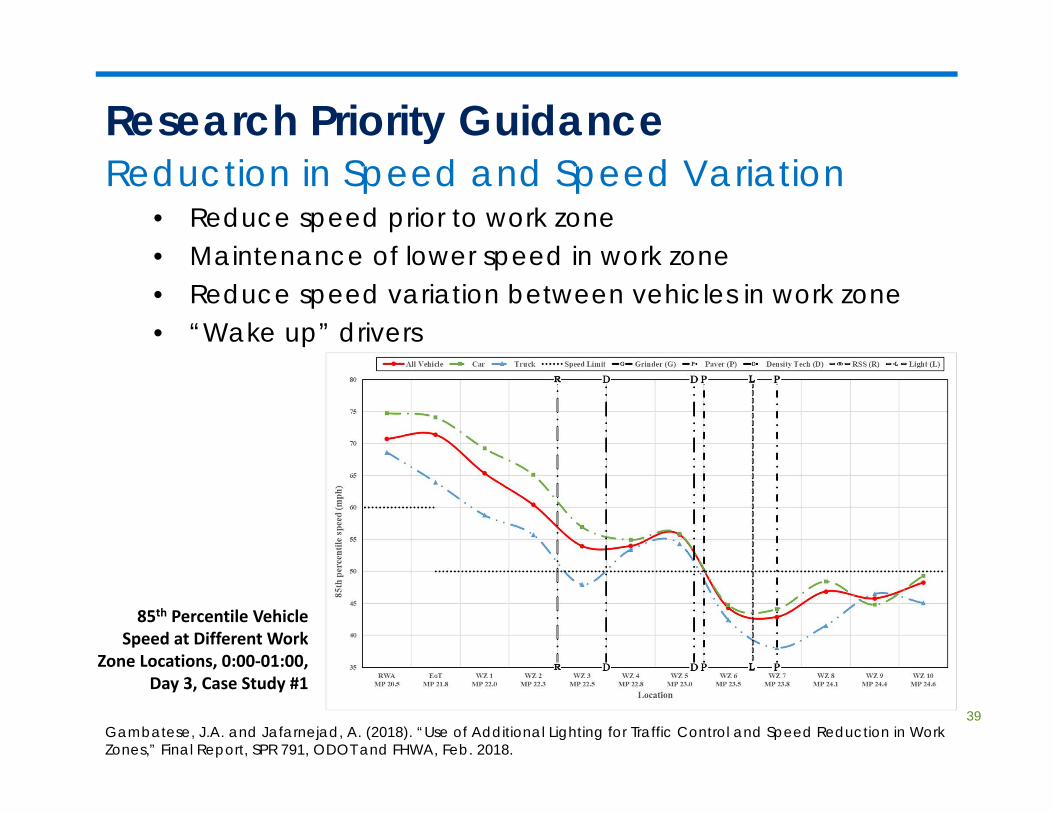
Research Priority GuidanceReduction in Speed and Speed Variation
• Reduce speed prior to work zone• Maintenance of lower speed in work zone• Reduce speed variation between vehicles in work zone• “Wake up” drivers
39
85th Percentile Vehicle Speed at Different Work
Zone Locations, 0:00‐01:00, Day 3, Case Study #1
Gambatese, J.A. and Jafarnejad, A. (2018). “Use of Additional Lighting for Traffic Control and Speed Reduction in Work Zones,” Final Report, SPR 791, ODOT and FHWA, Feb. 2018.

Research Priority GuidanceHierarchy of Controls
40
EliminationEliminate the hazard during design
SubstitutionSubstitute a less-hazardous material or
form during design
Engineering Controls“Design-in” engineering controls,
Incorporate warning systems
Administrative ControlsWell-designed work
methods & organization
PPEAvailable, effective,
easy to useLow
High
Reliability of Control
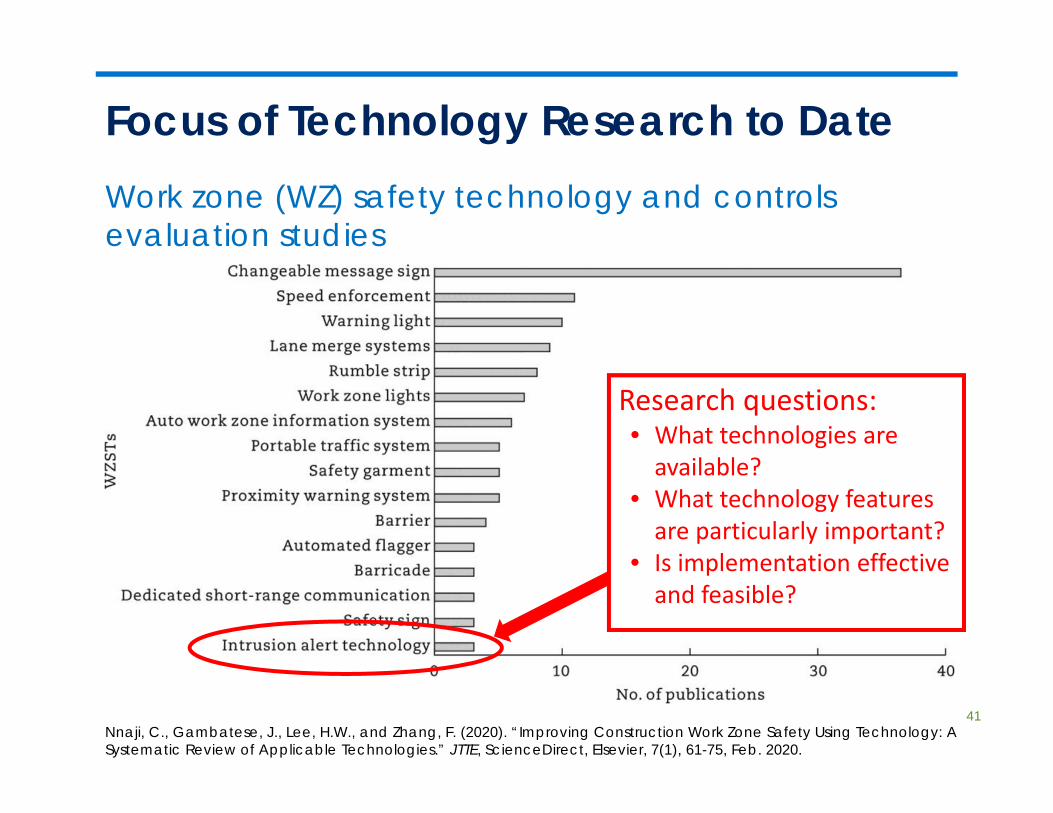
Focus of Technology Research to DateWork zone (WZ) safety technology and controls evaluation studies
41Nnaji, C., Gambatese, J., Lee, H.W., and Zhang, F. (2020). “Improving Construction Work Zone Safety Using Technology: A Systematic Review of Applicable Technologies.” JTTE, ScienceDirect, Elsevier, 7(1), 61-75, Feb. 2020.
Research questions:• What technologies are available?
• What technology features are particularly important?
• Is implementation effective and feasible?

Example WZ Intrusion Alert Technologies
42
SmartCone(SmartCone Technologies,
http://innovationsoftheworld.com/smartcone-technologies/)SonoBlaster®
(Transpo Industries, Inc., http://www.transpo.com/roads-
highways/safety-products/wz-intrusion-alarm#itemAttachments)
Traffic Guard Worker Alert System(Astro Optics,
http://www.astrooptics.com/products/traffic-guard-worker-alert-system)
Intellicone(Highway Resource Solutions,
http://www.highwayresource.co.uk/)
AWARE(Oldcastle Materials / ARTIS, LLC,
https://static.tti.tamu.edu/tti.tamu.edu/documents/TTI-2017-2.pdf)
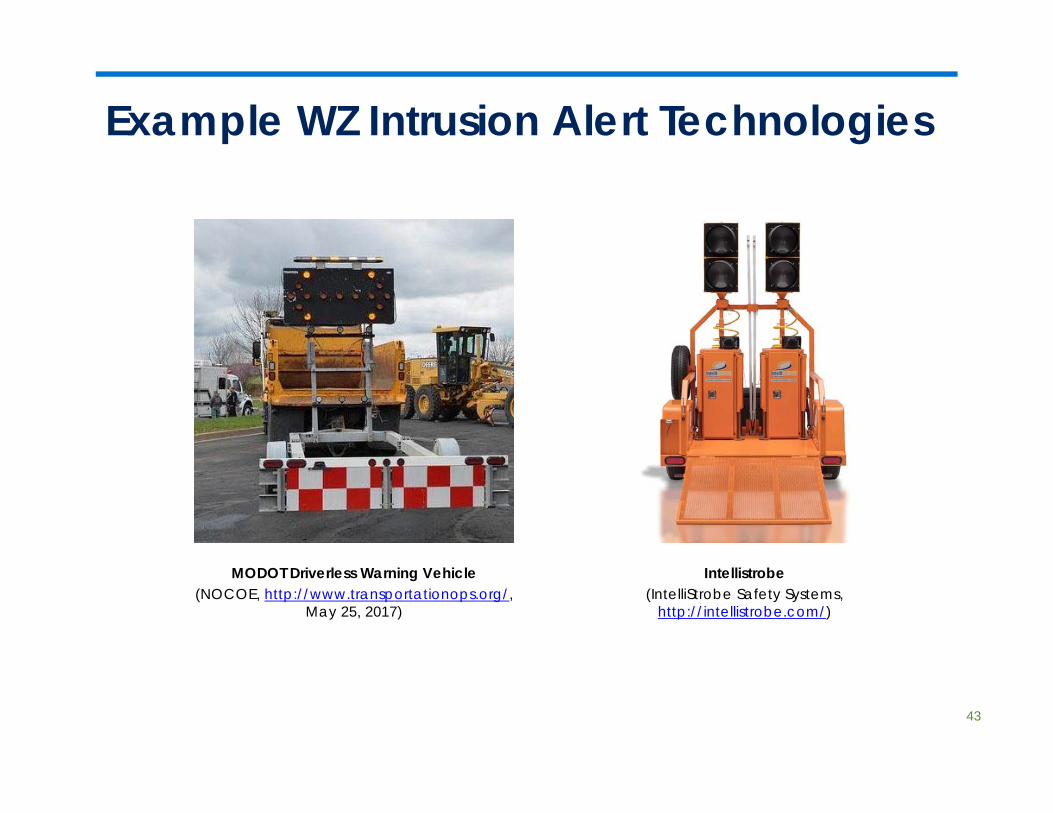
Example WZ Intrusion Alert Technologies
43
MODOT Driverless Warning Vehicle(NOCOE, http://www.transportationops.org/,
May 25, 2017)
Intellistrobe(IntelliStrobe Safety Systems,
http://intellistrobe.com/)
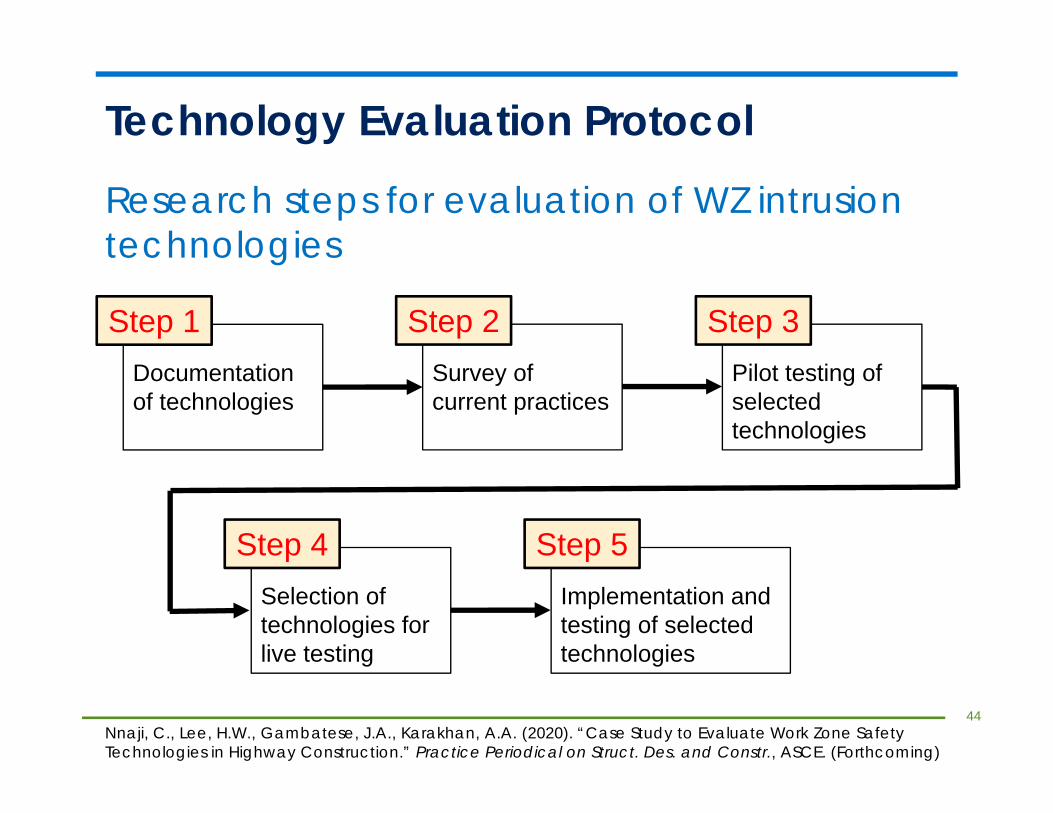
Documentation of technologies
Technology Evaluation Protocol
Research steps for evaluation of WZ intrusion technologies
44Nnaji, C., Lee, H.W., Gambatese, J.A., Karakhan, A.A. (2020). “Case Study to Evaluate Work Zone Safety Technologies in Highway Construction.” Practice Periodical on Struct. Des. and Constr., ASCE. (Forthcoming)
Step 1Survey of current practices
Step 2Pilot testing of selected technologies
Step 3
Selection of technologies for live testing
Step 4Implementation and testing of selected technologies
Step 5
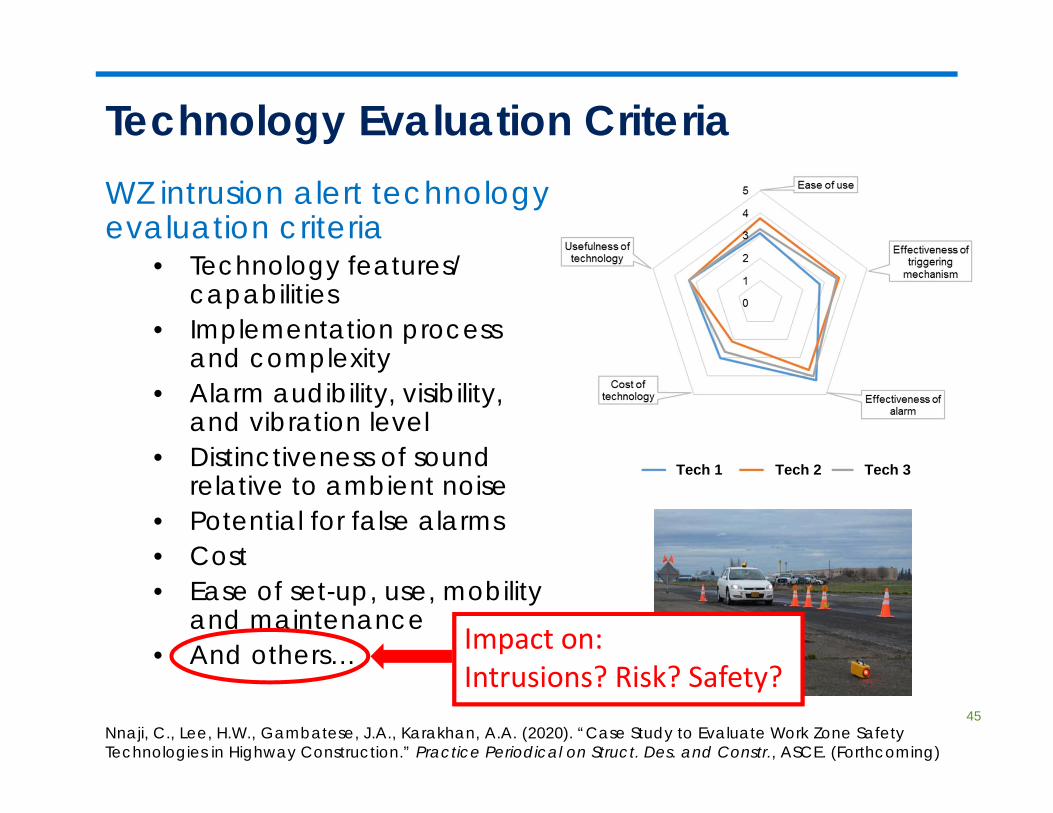
Technology Evaluation CriteriaWZ intrusion alert technology evaluation criteria
• Technology features/ capabilities
• Implementation process and complexity
• Alarm audibility, visibility, and vibration level
• Distinctiveness of sound relative to ambient noise
• Potential for false alarms• Cost• Ease of set-up, use, mobility
and maintenance• And others…
45Nnaji, C., Lee, H.W., Gambatese, J.A., Karakhan, A.A. (2020). “Case Study to Evaluate Work Zone Safety Technologies in Highway Construction.” Practice Periodical on Struct. Des. and Constr., ASCE. (Forthcoming)
Tech 1 Tech 2 Tech 3
Impact on:Intrusions? Risk? Safety?

Reliability, Accuracy, & Implementation
46
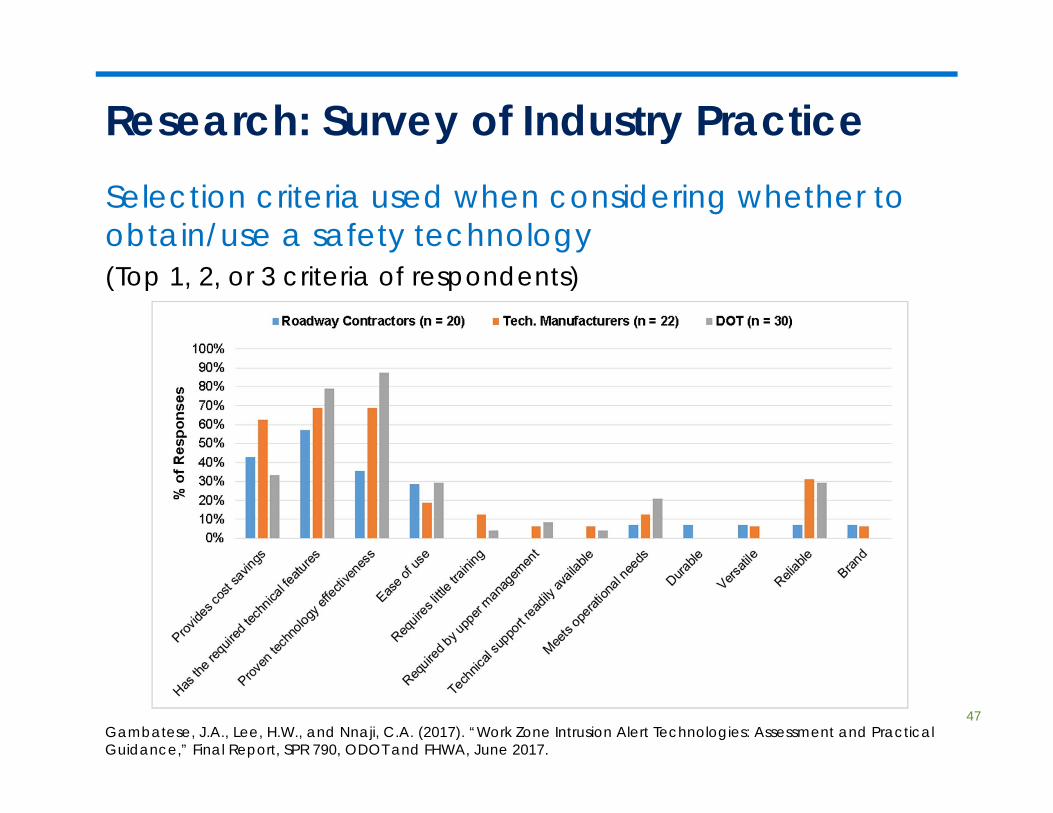
Research: Survey of Industry PracticeSelection criteria used when considering whether to obtain/use a safety technology(Top 1, 2, or 3 criteria of respondents)
47Gambatese, J.A., Lee, H.W., and Nnaji, C.A. (2017). “Work Zone Intrusion Alert Technologies: Assessment and Practical Guidance,” Final Report, SPR 790, ODOT and FHWA, June 2017.

Research: Survey of Industry Practice
Types of WZ safety technologies used on construction projects (n=111)
48Gambatese, J.A., Lee, H.W., and Nnaji, C.A. (2017). “Work Zone Intrusion Alert Technologies: Assessment and Practical Guidance,” Final Report, SPR 790, ODOT and FHWA, June 2017.
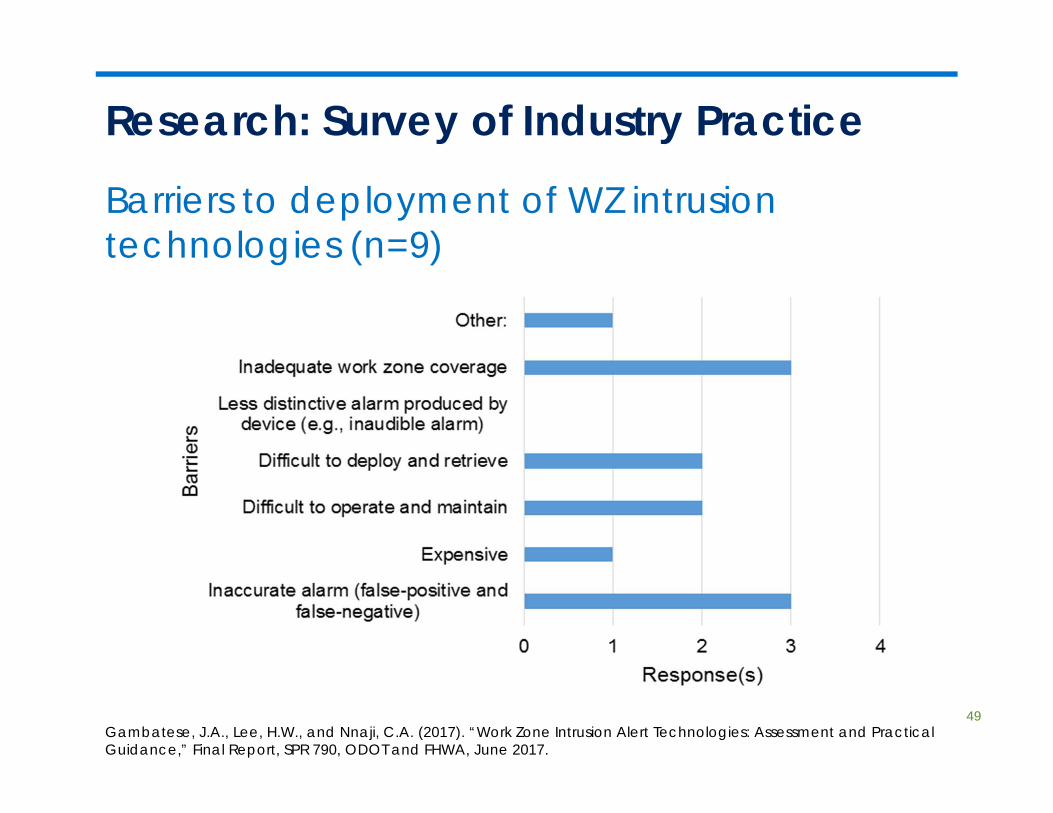
Research: Survey of Industry Practice
Barriers to deployment of WZ intrusion technologies (n=9)
49Gambatese, J.A., Lee, H.W., and Nnaji, C.A. (2017). “Work Zone Intrusion Alert Technologies: Assessment and Practical Guidance,” Final Report, SPR 790, ODOT and FHWA, June 2017.

Research: Technology Performance
Sound level of radio-based and pneumatic/ microwave alarms
50Awolusi, I. and Marks, E.D. (2019). “Active Work Zone Safety: Preventing Accidents Using Intrusion Sensing Technologies.” Frontiers in Built Environment, 5(21), March 4, 2019.

Research: Technology Performance
Field testing of selected technologies:Reaction time (seconds) when WZ intrusion technology is triggered 50 feet away from workers
51Gambatese, J.A., Lee, H.W., and Nnaji, C.A. (2017). “Work Zone Intrusion Alert Technologies: Assessment and Practical Guidance,” Final Report, SPR 790, ODOT and FHWA, June 2017.

Research: Technology Performance
52
Assessment of AWARE System:Test runs versus conservative stopping site distance threshold (t = 4.5 sec)
Theiss, L., Lindheimer, T., and Ullman, G.L. (2018). “Closed Course Performance Testing of a Work Zone Intrusion Alarm System.” Transportation Research Record, National Academies of Science, Vol. 2672, Issue 16, 2018.
Notes:Trajectory: Vehicle travelling towards closed work area and in same lane as closed work area, starting at 45 mph and decelerating to a stop.
AASHTO SSD: t = 2.5 sec.

Research: Technology Recommendations
Selection guide for work zone intrusion detection devices
53Marks, E. (2017). Highway Work Zone Intrusion Alert Systems Implementation Guide. Alabama Department of Transportation (ALDOT), July 2017.
Work Zone Intrusion Research Needs
Recommendations for future research:
• Further development of technology capabilitieso Individual work zone intrusion alarmso Connected systems (infrastructure,
construction equipment/vehicles, public vehicles)
• Evaluation of technologies based on their readiness for implementation, e.g., technology readiness level (TRL)
• Guidance for adoption of work zone intrusion technologies
54

Examples of Recent and Ongoing Research
Thank you for your interest!
Questions? Comments?
For more information:[email protected]
55

Worker-in-the-loop real time safety system for short-duration
highway work zonesHamed Tabkhi, Ph.D.
UNC Charlotte
Supported by National Science Foundation (NSF)

57
Who We Are?
Transformative Computer Systems and Architecture Research Lab (TeCSAR)Director: Hamed Tabkhi, Ph.D.https://coefs.uncc.edu/htabkhiv/
Smart Infrastructure Asset Management LAB (SIAM)Director: Omidreza Shoghli, Ph.D.https://sites.google.com/uncc.edu/siamlab
Adrian Burde Ph.D. Independent Scientist, Project Manager @ Leidos
Nichole L. Morris, Ph.D. Director of HumanFIRST Laboratory, University of Minnesotahttp://www.humanfirst.umn.edu/

Objective
58
Artificial Intelligence (AI) to enhance the highway workers safety through real-time situational awareness.
Wearable Devices Becoming Ubiquitous
59
60
Two Pillars
1.Real-time AI and Computer Vision to Monitor Dangerous Driving Behaviors near the Work zone
2.Real-time Multi-model (Visual and Audio) Feedback to Workers through Smart Glasses
Technology is co-designed and co-created with direct inputs from highway workers and state DOTs

61
Overview

62
Animated Demo

63
Latency Requirements
64
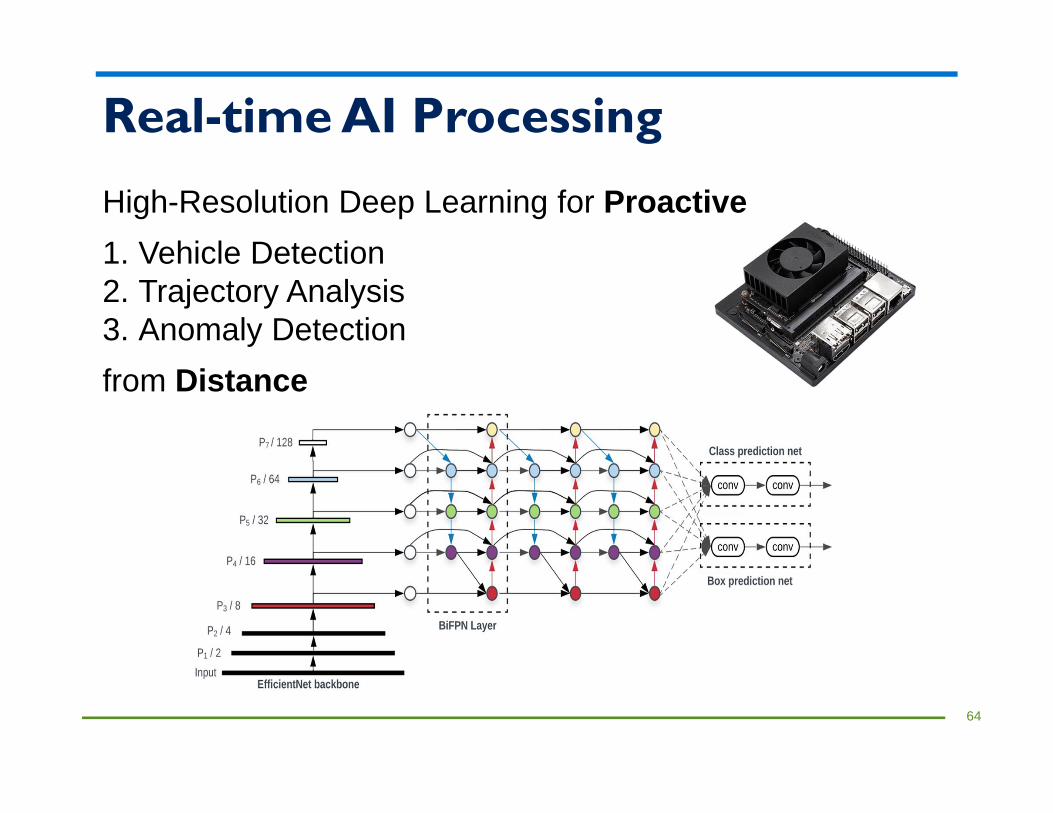
Real-time AI Processing
High-Resolution Deep Learning for Proactive1. Vehicle Detection2. Trajectory Analysis3. Anomaly Detectionfrom Distance

65
Real-time FeedbackTightly coupled design between … Real-time AI … Real-time Feedback
66
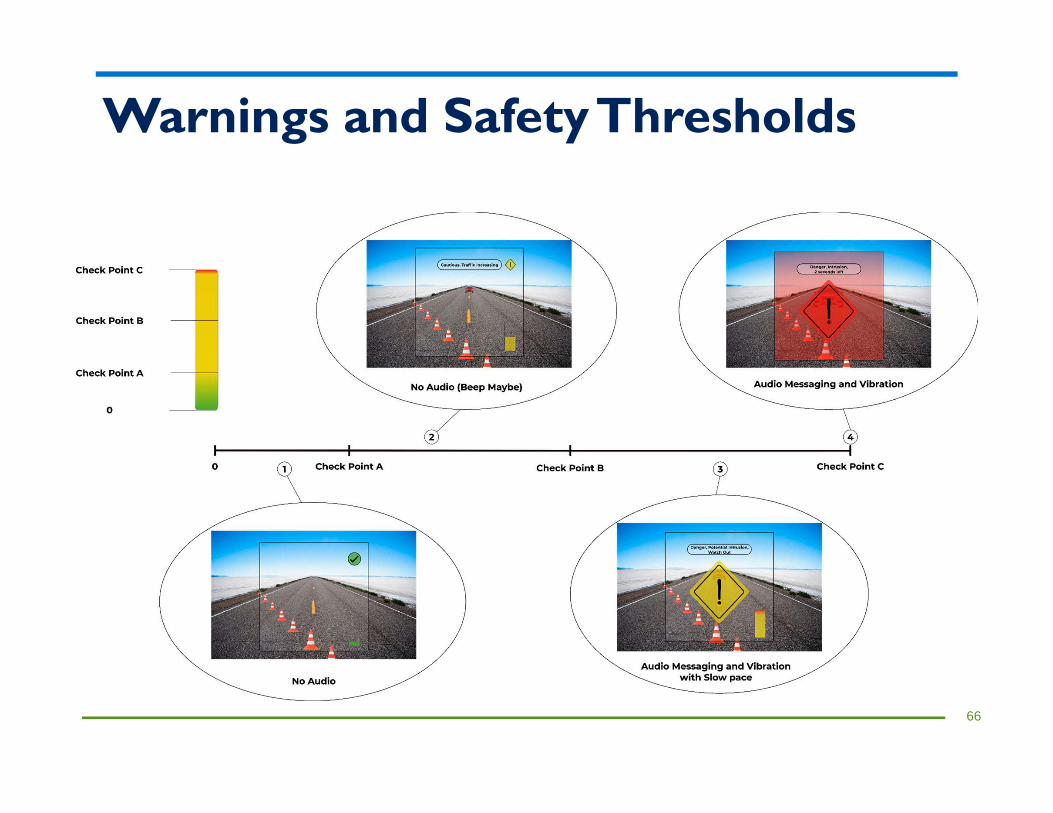
Warnings and Safety Thresholds

67
Animated Demo of User Interface App.

68
Current Focus
• Video Data from Real Workzones for Training of AI and Video Analytic Algorithms
- Looking at incoming traffic
• Feedback from Highway Workers on Visual Interfaces and Warnings - Online Surveys regarding UX/UI Design
Thanks!
69
Moderated Q&A Session
70
71
Contact Us
• Adrian Burde, AKR10 Committee Research Coordinator – [email protected]
• Tim Luttrell – [email protected]• John Lorme• Xianbiao Hu – [email protected]• John Gambatese –
[email protected]• Hamed Tabkhi - [email protected]
Thank you for joining our webinar!
72

Today’s Presenters
XianBiao (XB) Hu,Missouri University of Science and Technology
Timothy Luttrell,Leidos
#TRBWebinar
John Lorme, Colorado DOT
John Gambatese,Oregon State University
Hamed Tabkhi,University of North Carolina, Charlotte

Get Involved with TRB
#TRBwebinarReceive emails about upcoming TRB webinarshttps://bit.ly/TRBemails
Find upcoming conferenceshttp://www.trb.org/Calendar
Get Involved with TRB
Be a Friend of a Committee bit.ly/TRBcommittees– Networking opportunities
– May provide a path to Standing Committee membership
Join a Standing Committee bit.ly/TRBstandingcommittee
Work with CRP https://bit.ly/TRB-crp
Update your information www.mytrb.org
#TRBwebinar
Getting involved is free!
#TRB100





























