Embed Size (px)
Citation preview

EVS’27, Barcelona, November 2013
« Energetic Macroscopic Representation and
Inversion-Based control of a CVT-based HEV »
M. Chouhou, F. Grée, C. Jivan, A. Bouscayrol, T. Hofman
(Univ. Lille1, France and Tech. Univ. Eindhoven, The Netherlands)

2 / 15OBJECTIVE AND OUTLINE
1. Studied CVT-based Hybrid Electric Vehicle
2. Energetic Macroscopic Representation of the CVT-based HEV
3. Inversion-based control of the CVT-based HEV
4. Simulation results
Objective: definition of the control scheme of a Hybrid Electric Vehicle
(HEV) using a Continuously Variable Transmission (CVT)
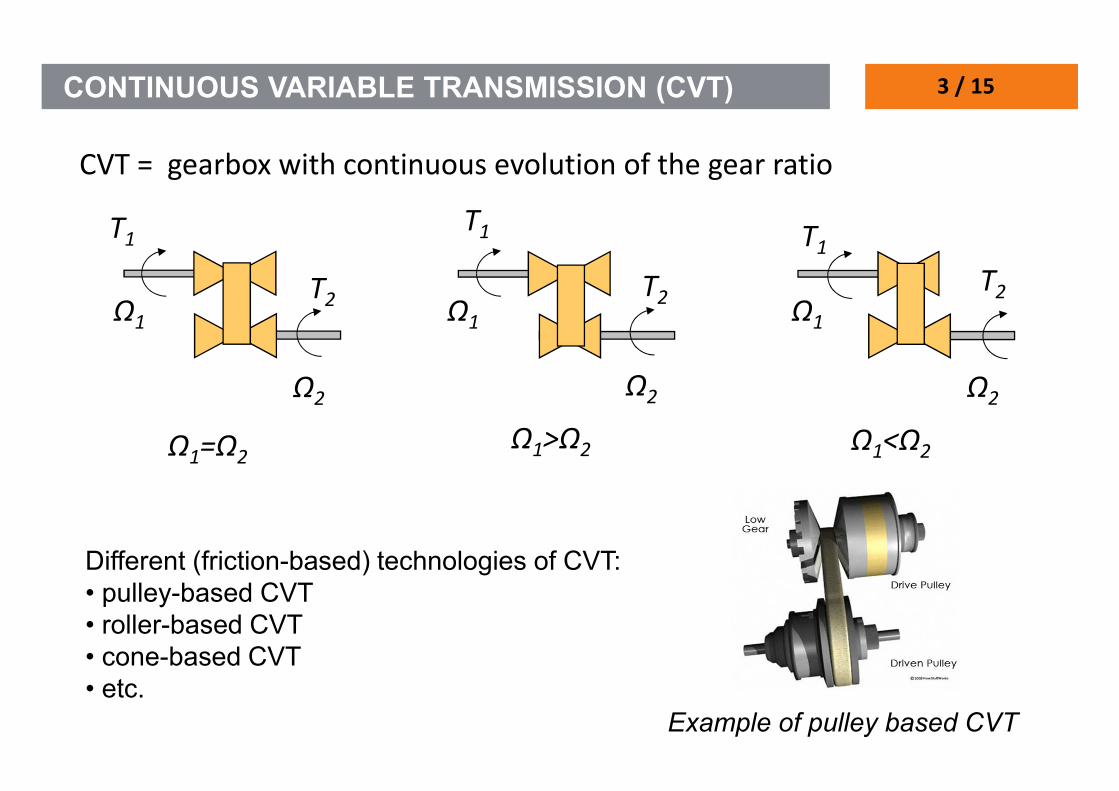
3 / 15CONTINUOUS VARIABLE TRANSMISSION (CVT)
T1
Ω1
T2
Ω2
T1
Ω1
T2
Ω2
T1
Ω1
T2
Ω2
Ω1=Ω2Ω1>Ω2 Ω1<Ω2
CVT = gearbox with continuous evolution of the gear ratio
Different (friction-based) technologies of CVT:
• pulley-based CVT
• roller-based CVT
• cone-based CVT
• etc.
Example of pulley based CVT

4 / 15CVT-BASED HYBRID ELECTIC VEHICLE (HEV)
IC EngineCVT
belt
inverter
Parallel HEV using a CVT
fuel
tank
battery
electrical
machine
(PMSM)
torque
converter
Tice
Ωice
Tem
Ωice
Ttot
Ωice
Ttc
Ωtc
Tcvt
Ωwh

5 / 15
vBat Env
DCM1
DCM2
EP1
EP2
Bat. Fres
ME1
ME2
Energetic
Macroscopic
Representation
(EMR)
Organisation of
control schemes
of complex systems
vref
Strategy
ENERGETIC MACROSCOPIC REPRESENTATION
power control

6 / 15CVT MODEL AND REPRESENTATION
Ttc
Ωcvt Tcvt
Ωwh
CVT = gearbox with continuous evolution of the gear ratio
=
=
whcvtcvt
tcjcvtcvtcvt
k
TkT
ΩΩη
<−=
>=
0 if 1
0 if 1
cvt
cvt
Pj
Pj
)FF(ukdt
dpptccvtcvt 21 −= Ω
Assumptions: constant efficiency and no stiffness and dynamic shift
CVT model: EMR of the CVT
Fp1
Fp2
Ttc Tcvt
ucvt
Ωcvt Ωwh

7 / 15EMR OF THE CVT-BASED HEV
brake
ubatbattery
ICE
electric
drive belt TC chassisCVT wheel
Environ.
ivsi
Tem
Tem-ref
Ωblt
Tice-ref
Tice
Ωice
Ωtc
Tblt Ttc Tcvt Fwh Ftot
Fres
vhev
vhevvhev
vhev
Fbk
Fbk-ref
ucvtktc
Ωcvt Ωwh
distribution of energy
between e-drive and ICE
(when traction)distribution of energy
between electric and mechanical
brake (when deceleration)
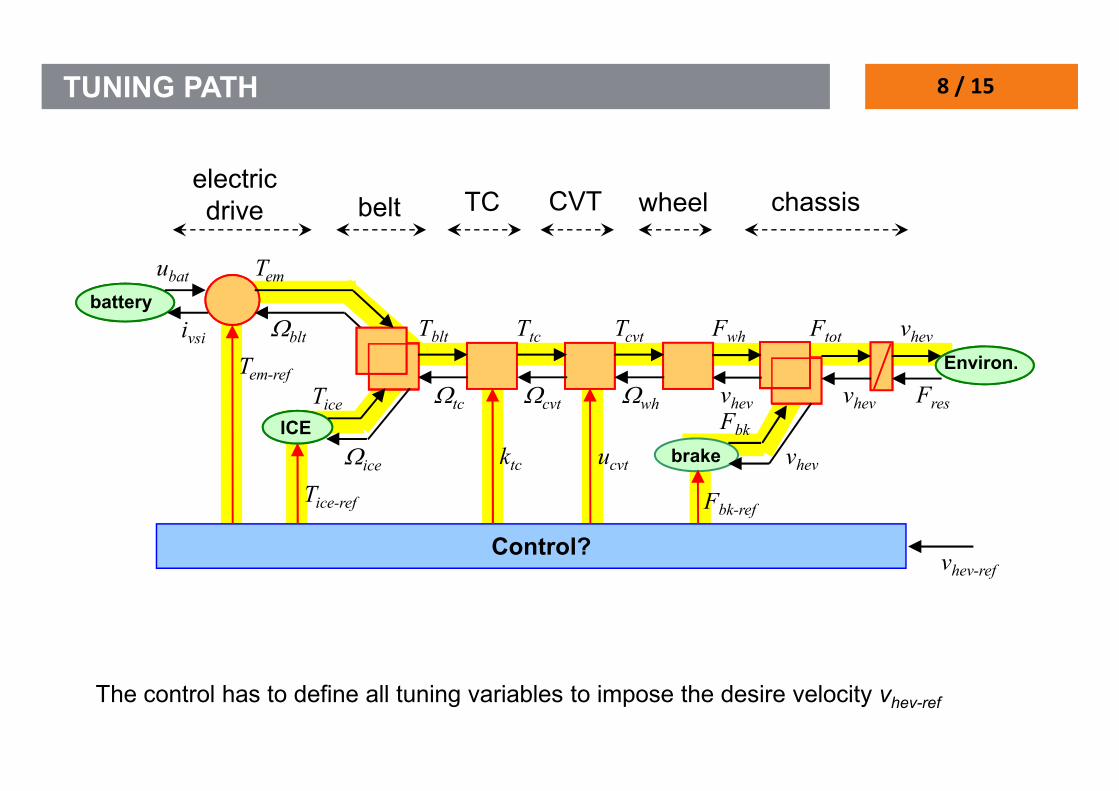
8 / 15TUNING PATH
brake
ubatbattery
ICE
electric
drive belt TC chassisCVT wheel
Control?
Environ.
ivsi
Tem
Tem-ref
Ωblt
Tice-ref
Tice
Ωice
Ωtc
Tblt Ttc Tcvt Fwh Ftot
Fres
vhev
vhevvhev
vhev
Fbk
Fbk-ref
vhev-ref
ucvtktc
Ωcvt Ωwh
The control has to define all tuning variables to impose the desire velocity vhev-ref
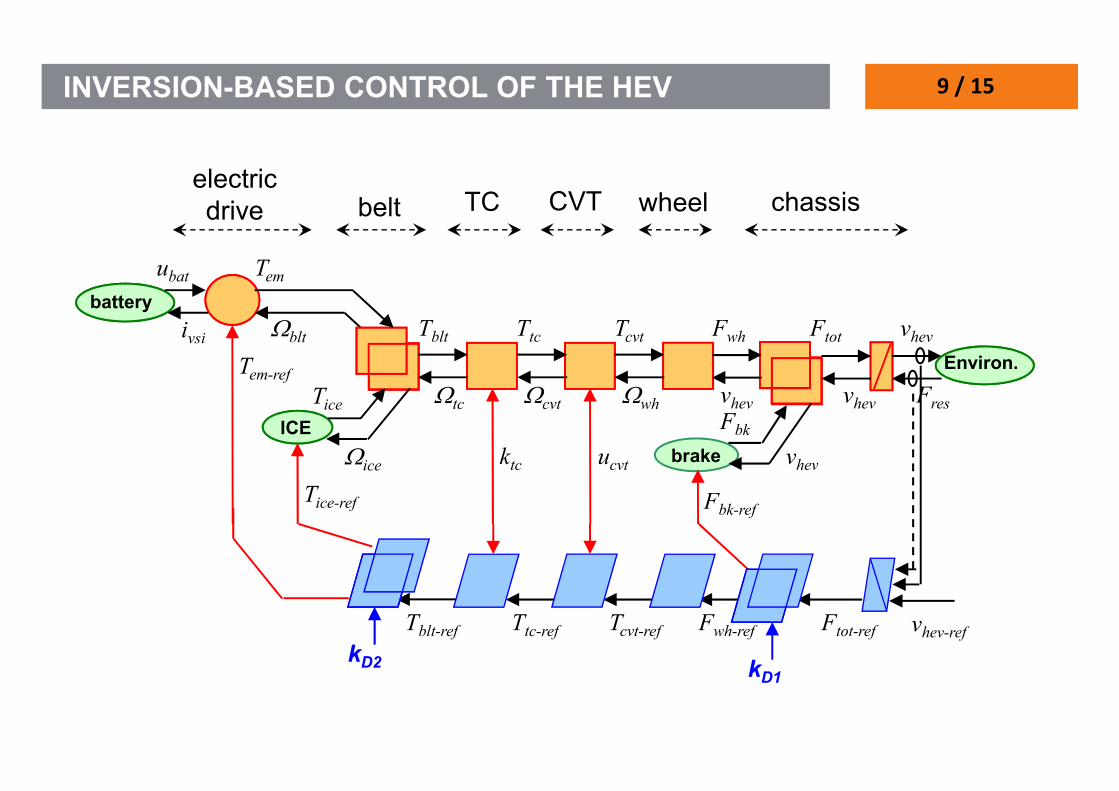
9 / 15
Tblt-ref Ttc-ref Tcvt-ref
INVERSION-BASED CONTROL OF THE HEV
electric
drive belt TC chassisCVT wheel
vhev-ref
brake
ubatbattery
ICE
Environ.
ivsi
Tem
Tem-ref
Ωblt
Tice-ref
Tice
Ωice
Ωtc
Tblt Ttc Tcvt Fwh Ftot
Fres
vhev
vhevvhev
vhev
Fbk
Fbk-ref
ucvtktc
Ωcvt Ωwh
Ftot-refFwh-ref
kD2
kD1

10 / 15
Tblt-ref Ttc-ref Tcvt-ref
STRATEGY OF ENERGY MANAGEMENT
vhev-ref
brake
ubatbattery
ICE
Environ.
ivsi
Tem
Tem-ref
Ωblt
Tice-ref
Tice
Ωice
Ωtc
Tblt Ttc Tcvt Fwh Ftot
Fres
vhev
vhevvhev
vhev
Fbk
Fbk-ref
ucvtktc
Ωcvt Ωwh
Ftot-refFwh-ref
Strategy
kD2 k
D1
vhevSoC
The strategy aims to reduce the fuel consumption by:
• the energy distribution between e-drive and ICE (kD2)
• the brake distribution between e-brake and m-brake (kD1)
• the choice of the CVT ratio (ucvt)
• the connection of the ICE (ktc)

11 / 15PRINCIPLE OF THE STRATEGY
0.02 0.02 0.020.04 0.04 0.040.06 0.060.06
0.08 0.080.08
0.1 0.1
0.1
0.1
2
0.120.12
0.12
0.1
4
0.140.14
0.14
0.1
6
0.160.16
0.16
0.1
8
0.1
8
0.180.18
0.18
0.2
0.2
0.2
0.2
0.2
0.2
2
0.2
2
0.22
0.22
0.22
0.2
4
0.2
4
0.24
0.24
0.24
0.24
0.2
6
0.26
0.26
0.26
0.2
6
0.26
0.26
0.2
8
0.28
0.28
0.2
8
0.28
0.28
0.3
0.3
0.32
100 200 300 400 5000
20
40
60
80
100
120
140
160
180 torque (Nm)
speed (rad/s)
optimal point wheel power
∆Ω∆Ω∆Ω∆Ω
∆∆∆∆T
The strategy aims to put the ICE in its best consumption area
ICE

12 / 15PRINCIPLE OF THE STRATEGY
0.02 0.02 0.020.04 0.04 0.040.06 0.060.06
0.08 0.080.08
0.1 0.1
0.1
0.1
2
0.120.12
0.12
0.1
4
0.140.14
0.14
0.1
6
0.160.16
0.16
0.1
8
0.1
8
0.180.18
0.18
0.2
0.2
0.2
0.2
0.2
0.2
2
0.2
2
0.22
0.22
0.22
0.2
4
0.2
4
0.24
0.24
0.24
0.24
0.2
6
0.26
0.26
0.26
0.2
6
0.26
0.26
0.2
8
0.28
0.28
0.2
8
0.28
0.28
0.3
0.3
0.32
100 200 300 400 5000
20
40
60
80
100
120
140
160
180 torque (Nm)
speed (rad/s)
optimal point wheel power
∆Ω∆Ω∆Ω∆Ω
∆∆∆∆T
ICE
reftot
opticeD
T
Tk
−
−=2
measwh
opticecvtk
−
−=Ω
Ω
Strategy
kD2
vhevSoC
ktc kcvt
Ktc=1 when traction
(ICE coupled)
KD1=1 when braking
(max of recovery
Energy)
kD1
Ttot-ref
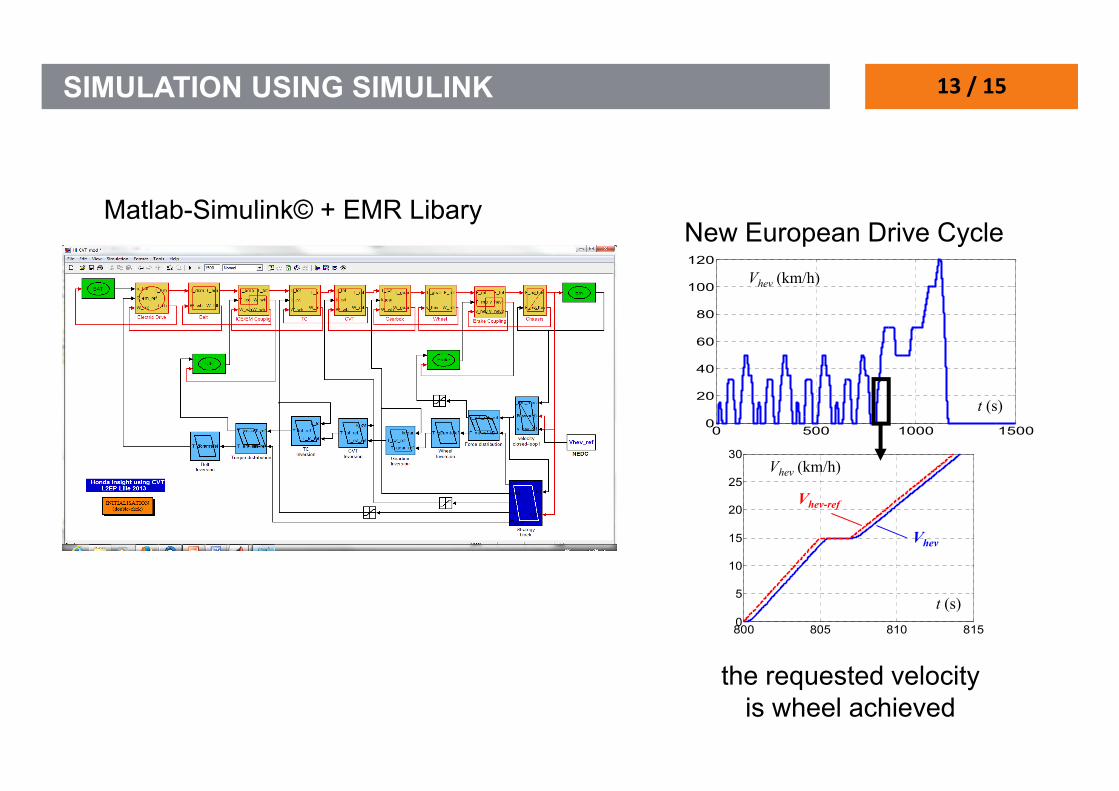
13 / 15SIMULATION USING SIMULINK
800 805 810 8150
5
10
15
20
25
30
0 500 1000 15000
20
40
60
80
100
120
Vhev-ref
Vhev
Vhev (km/h)
t (s)
t (s)
Vhev (km/h)
Matlab-Simulink© + EMR LibaryNew European Drive Cycle
the requested velocity
is wheel achieved

14 / 15FUEL CONSUMPTION
Thermal vehicle
with a 4-speed gearbox
0 5 0 0 1 0 0 0 1 5 0 00
1
2
3
4
kgb
t (s)
0 5 0 0 1 0 0 0 1 5 0 00
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
fuel (L)
t (s)
4.018 L/100 km
Thermal vehicle
with CVT
Hybrid vehicle
with CVT
4.32 L/100 km5.04 L/100 km
0 500 1000 15000
0.1
0.2
0.3
0.4
0.5
0.6
0 500 1000 15000
1
2
3
4
kcvt
t (s)
fuel (L)
t (s)
0 500 1000 15000
0.1
0.2
0.3
0.4
0.5
0.6
0 500 1000 15000
1
2
3
4kcvt
t (s)
fuel (L)
t (s)
charge at
standstill
but kCVT often limited
and recharge at standstill

15 / 15CONCLUSION
• A CVT-based HEV is a complex vehicle to manage because of the high number of
tuning variable to achieve the velocity by reducing the fuel consumption
• EMR and the deduced inversion-based control is a valuable way to organize the
control of this complex vehicle
• The interest of the CVT has been demonstrated in term of fuel consumption but the
gain between a CVT thermal vehicle and a CVT hybrid vehicle is not relevant using a
rule-based strategy for energy management
A optimal energy management should now be used to develop a more efficient
strategy and to improve the fuel saving for a CVT-based HEV

Coimbra – Portugal
UNESCO Wold Heritage
October 27-30, 2014
http://www.vppc2014.org
IEEE Vehicle Power and Propulsion Conference“Spreading E-Mobility Everywhere”
Organization:
Supported by:
Digests deadline: 31th March 2014
Notification deadline:18th May 2014
Final paper deadline: 01th July 2014
Conference in a Carbon Care Philosophy
We will be pleased to Welcome you in We will be pleased to Welcome you in We will be pleased to Welcome you in We will be pleased to Welcome you in
Coimbra!Coimbra!Coimbra!Coimbra!

EVS’27, Barcelona, November 2013
« Energetic Macroscopic Representation and
Inversion-Based control of a CVT-based HEV »
M. Chouhou, F. Grée, C. Jivan, A. Bouscayrol, T. Hofman
(Univ. Lille1, France and Tech. Univ. Einhoven, The Netherlands)

18 / 15STRATEGY FOR A CVT-BASED THERMAL VEHIC.
100 200 300 4000
50
100
150
torque (Nm)
speed (rad/s)
optimal operation line
maximal torque
wheel power
constant power
As a CVT can only act on torque ratio OR speed ratio,
the optimal operation line is the preferable operation line
=
=
whcvtcvt
tcjcvtcvtcvt
k
TkT
ΩΩη





























