Embed Size (px)
Citation preview

ORIGINAL ARTICLE
Emergent self-organizing feature map for recognizingroad sign images
Yok-Yen Nguwi • Siu-Yeung Cho
Received: 28 January 2009 / Accepted: 15 October 2009 / Published online: 3 November 2009
� Springer-Verlag London Limited 2009
Abstract Road sign recognition system remains a chal-
lenging part of designing an Intelligent Driving Support
System. While there exist many approaches to classify road
signs, none have adopted an unsupervised approach. This
paper proposes a way of Self-Organizing feature mapping
for recognizing a road sign. The emergent self-organizing
map (ESOM) is employed for the feature mapping in this
study. It has the capability of visualizing the distance
structures as well as the density structure of high-dimen-
sional data sets, in which the ESOM is suitable to detect
non-trivial cluster structures. This paper discusses the
usage of ESOM for road sign detection and classification.
The benchmarking against some other commonly used
classifiers was performed. The results demonstrate that the
ESOM approach outperforms the others in conducting the
same simulations of the road sign recognition. We further
demonstrate that the result obtained with ESOM is signif-
icantly more superior than traditional SOM which does not
take into the boundary effect like ESOM did.
Keywords Self-organizing map � Data visualization �Image classification � Road sign recognition
1 Introduction
Self-organizing map (SOM), proposed by Kohonen [1, 2],
can be used for dimension reduction, vector quantization,
and visualization. Some recent SOM-based applications in
image processing and pattern recognition domains can be
seen in [3–5]. SOM quantizes input data to a small number
of neurons and still preserves the topology of input data.
Indeed, SOM can be seen as discrete approximation of
principal surfaces in input space [6, 7]. Many visualization
methods based on SOM were proposed, for examples in
[8–11]. Conventional SOM topology seems to be inher-
ently limited by the fixed network. One must adopt a
number of trials and tests to select an appropriate network
structure and size. Several improved SOMs or related
algorithms have been developed to overcome these short-
comings. All these algorithms are mainly in the direction of
growing an SOM adaptively. Although most of these
extended algorithms are able to dynamically increase the
network to an appropriate size, it may not be easy to use the
final SOM maps for visualizing high-dimensional input
data on a 2-D plane, or for distinguishing clusters on a 2-D
plane.
Recently, the ViSOM [12], a new visualization method,
regularizes the inter-neuron distances such that the inter-
neuron distances in the input space resemble those in the
output space after the completion of training. This feature
can be useful to some applications because it is able to
preserve the topology information as well as the inter-
neuron distances. This characteristic is attributed to the
output topology pre-defined in a regular 2-D grid so that
the trained neurons are almost regularly distributed in the
input space. The ViSOM delivers better data visualization
compared with conventional SOM and other visualization
methods.
Another recent approach for SOM-based visualization is
called emergent SOM (ESOM) [13]. Emergent SOM is an
extension of SOM that allows the emergence of intrinsic
structural features of high-dimensional data onto a two-
dimensional map. It has been demonstrated that using
Y.-Y. Nguwi � S.-Y. Cho (&)
Division of Computing Systems, School of Computer
Engineering, Nanyang Technological University,
Nanyang Avenue, Singapore 639798, Singapore
e-mail: [email protected]
123
Neural Comput & Applic (2010) 19:601–615
DOI 10.1007/s00521-009-0315-6

ESOM is a significantly different process from using k-
means. ESOM is a powerful tool for clustering, visualiza-
tion, and classification.
In this paper, we propose the visualization of road sign
images through the methodology of feature clustering and
visualizing by emergent self-organising map (ESOM). The
observation obtained through the visualization process will
be discussed. Six classes of road signs are investigated;
they are namely stop sign, give-way sign, no left turn sign,
no right turn sign, speed limit 60 km/h and speed limit
90 km/h. The focus of this work is to show how the ESOM
can be used as an unsupervised network that is able to
segregate the six classes of the road signs. Due to the lack
of publicly available road sign database, this work
describes and makes available a road sign database that
consist of 447 road scene images and 1,600 road sign
images.
The paper is organized as follows: Sect. 2 describes
some related background works and motivation of pro-
posing a road sign recognition system. Section 3 gives an
overview on the usage of ESOM. Section 4 presents the
visualization and classification performances of using
ESOM on the road sign image. Finally, conclusion of this
paper is drawn in Sect. 5.
2 Related works and motivations
In recent years, the works on developing road sign rec-
ognition system are numbered. However, it is a very
important area that deserves wider attention. A road sign
recognition system provides timely alert to warn the dri-
ver of any critical sign ahead. The objective of a road
sign recognition system is to detect and classify one or
more road signs from coloured images captured by
camera. There exist many challenges that such a system
should address. For instances, lighting condition is a very
difficult problem to regulate. The strength of the light
depends on the time of the day and season, and also on
the weather conditions. In addition, road sign patterns
within images can be affected by shadows from sur-
rounding objects.
In general, a road sign recognition system will first
detect the road sign of interest in the image followed by
classifying it into different classes. Most of the solutions
rely on the colour and shape of the road sign. Colour is a
visual feature that represents the most significant clue that
can be easily noticed by the driver. The colours that are
used in road signs are regulated by different countries and
are often simple primary colours (red, green, or blue) with
the exception of yellow, a secondary colour. Colour-based
detection methods aim to segment the typical colours of
road signs in order to provide a region of interest for further
processing. Some colour-based detection methods are
colour thresholding [14], HSI transformation [43], colour
indexing [40], dynamic pixel aggregation [15], and region
growing [40]. A recent work by Ruta [37] represents the
road sign using discrete colour information with colour
distance transform. The accuracy is about 74.4%.
Shape, being one of the two important attributes of
road signs, can also be used for road sign recognition.
Some shape detection approaches work without the use of
colour information. However, the selection of a scheme
for the detection of road signs based on their shapes will
have to address more issues than their colour. For
example such issues as road signs in cluttered scenes,
imperfect shape, as well as variance in scale and size
make the detection task very challenging. Some imple-
mented shape-based methods are hierarchical spatial fea-
ture matching (HSFM) [16], template matching [20], and
distance transform matching [36]. The other methods that
have been implemented successfully in road sign recog-
nition include genetic algorithm [19], similarity measures
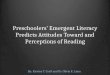
[39], and histographic recognition [32]. Table 1 gives an
overview of the commonly used approaches. The detailed
comparisons of different road sign recognition systems
can be seen in [40, 41].
Among the different methods that try to solve the road
sign recognition problem, we observe very few self-
organizing approaches. There is a recent work by Miguel
and Alastair [38] who attempt to use self-organizing map
for road sign recognition. They group the road signs
according to pictogram of sign and followed by hierar-
chical classification. But the work does not give details
on the specific types of road signs being recognized.
There is much more room to grow in the area of
supervised learning for road sign recognition. The ratio-
nale behind using a self-organizing approach in the road
sign recognition is that in the context of a driving sup-
port system, the recognition method cannot always be
taught in advance with all possible road signs; for
instance, some countries might have their own particular
road signs. We thereby introduce the use of ESOM that
forms clusters of different road signs by itself. It would
be quite useful to detect and identify the new kinds of
road signs by means of interactive training (or active
learning) system. On the other hand, the maps used by
most SOM applications are usually small and face sig-
nificant performance degradation when run on large data
sets. Training a small SOM on a data set is similar to k-
means clustering with k equals to the number of nodes in
the map. Basically, ESOM is an extension of SOM in
which large numbers of neurons are used to allow
topology preservation and to allow data structure to
emerge on the maps [13]. It has been demonstrated that
using ESOM is a significantly different process from
602 Neural Comput & Applic (2010) 19:601–615
123

Ta
ble
1C
om
par
iso
no
fro
adsi
gn
reco
gn
itio
nap
pro
ach
es
Met
ho
ds
Cat
.T
heo
ryA
dv
anta
ge(
s)P
oss
ible
issu
e(s)
Com
pu
tati
on
al
cost
Ref
.D
evel
op
erY
ear
Per
form
ance
Co
lour
dis
tan
ce
tran
sform
CD
efin
ea
dis
tan
cem
etri
cto
be
use
dfo
r
com
par
iso
ns
bet
wee
nim
age
of
ali
ke
sig
n
ob
serv
ed
Can
mo
del
mult
imo
dal
colo
ur
dis
trib
uti
on
s
25
–3
0F
ps
[37
]A
nd
rzej
etal
.2
01
07
94
–9
7.3
%
Fu
zzy
AR
TM
AP
CM
akes
use
of
mult
iple
stag
es.
Fir
st
det
erm
ines
the
bord
erof
the
sign
foll
ow
ed
by
pic
tog
ram
[42
]F
ley
ehet
al.
20
06
96
.7%
on
spee
d
lim
itsi
gn
.9
0%
on
ov
eral
l
Rin
gp
arti
tio
ned
ST
he
imag
eis
div
ided
by
sev
eral
con
cen
tric
area
sli
ke
rig
hts
Th
em
atch
ing
pro
cess
is
do
ne
by
com
pu
tin
gth
eh
isto
gra
m
dis
tan
ces
for
all
rin
gs
of
the
imag
esb
y
intr
od
uci
ng
the
wei
gh
tsfo
rev
en/r
ing
Do
esn
’tre
qu
ire
man
y
sam
ple
so
fsi
gn
imag
es
Pro
ble
mm
ayar
ise
for
seg
men
tati
on
of
traf
fic
sig
n
acco
rdin
gto
cert
ain
colo
ur
and
occ
lud
ed
ob
ject
0.1
4s
[30
]S
oet
edjo
etal
.2006
Mat
chin
gra
te
*9
3.9
%
Nea
rest
nei
ghbour
clas
sifi
cati
on
0A
nim
age
inth
ete
stse
tis
reco
gn
ized
by
assi
gnin
gto
itth
ela
bel
of
the
close
st
po
ints
inth
ele
arn
ing
set
Th
eim
age
inth
e
lear
nin
gse
tth
atbes
tco
rrel
ates
wit
hth
e
test
imag
eis
then
the
resu
lt
Fas
tan
dsi
mp
le\
1s
P4
2.2
GH
z
51
2M
BR
AM
[31
]E
scal
era
etal
.2
00
49
8%
hit
rate
Co
lour
thre
sho
ldin
g
segm
enta
tion
CC
om
par
esth
eco
lou
rp
rop
erti
esto
ase
to
f
val
ues
range
and
dec
ide
whic
hca
tegory
this
pix
elb
elon
gs
to
Sim
ple
22
0m
sP
C4
86
33
MH
z
[14
]E
scal
era
etal
.2
00
3
Co
lour
neu
ral
net
work
CT
rain
neu
rons
tore
cog
niz
eco
lou
rso
nro
ad
sig
n.
Cla
ssifi
esea
chp
ixel
wh
ether
the
pix
elh
asa
colo
ur
of
aro
adsi
gn
or
no
t
Fas
tm
atch
ing
adap
tab
le
Req
uir
ela
rge
set
of
trai
nin
gd
ata
totr
ain
up
ag
oo
dn
etw
ork
s
*0
.2s
Pen
tiu
m4
PC
1G
Hz
[44
]F
ang
etal
.2
00
3[
95
%o
fh
itra
te
Pic
togra
mre
cog
nit
ion
CU
sing
ase
ries
of
sig
nim
ages
wit
hh
and
-
defi
ned
reg
ion
so
fin
tere
stto
form
the
bo
rder
lin
eo
fro
adsi
gn
s.T
hes
eim
ages
are
then
use
dfo
rtr
ainin
gth
en
eura
ln
ets
Ver
yfa
stA
dap
tab
leC
ycl
eti
me
bel
ow
20
0m
s
[34
]V
itab
ile
etal
.2
00
2*
90
%o
fh
itra
te
Sp
ace-
var
ian
tse
nso
r
win
do
w
0B
yp
laci
ng
ase
nso
rw
ind
ow
on
the
road
sig
n
cen
tre,
itis
then
able
tore
cog
niz
ero
ad
sig
ns
Invar
iant
wit
hre
spec
t
tov
iew
ing
and
env
iro
nm
enta
l
con
dit
ion
s
Acc
ura
cyd
egra
des
if
the
road
sig
nce
ntr
e
fou
nd
isn
ot
the
actu
alce
ntr
e
0.2
5–
0.4
s,P
23
3[1
7]
Sh
apo
shnik
ov
etal
.2
00
2[
85
%su
cces
sra
te
Tra
nsf
orm
atio
nb
ased
on
CIE
CA
M9
7
mo
del
CF
irst
con
ver
tsR
GB
spac
eto
CIE
stan
dar
d
XY
Asp
ace.
Th
eli
gh
tnes
s,ch
rom
aan
d
hue
(LC
H)
are
then
obta
ined
usi
ng
CIE
CA
M9
7m
od
el
Ites
tim
ates
colo
urs
ver
ycl
ose
tov
iew
er
Ob
ject
sh
avin
g
sim
ilar
colo
ur
to
road
sig
nco
uld
be
seg
men
ted
asw
ell
[33
]G
aoet
al.
20
02
[9
0%
det
ecti
on
hit
Dy
nam
icp
ixel
Ag
gre
gat
ion
CP
roce
sso
nth
eH
SI
colo
ur
spac
e.It
loca
tes
dy
nam
ic,
op
tim
ized
HS
Isu
b-s
pac
es,
acco
rdin
gto
the
satu
rati
on
and
inte
nsi
tyof
the
pro
cess
edo
utd
oo
rim
ages
Red
uce
hu
ein
stab
ilit
y
inre
alsc
enes
[15
]V
itab
ile
etal
.2
00
1[
84
%o
np
enti
um
35
50
MH
z
un
der
lin
ux
HS
Itr
ansf
orm
atio
nC
Enco
des
colo
ur
info
rmat
ion
by
separ
atin
g
ou
tan
ov
eral
lin
ten
sity
val
ue
fro
mtw
o
val
ues
enco
din
gh
ue
and
satu
rati
on
to
mak
eit
mo
reim
mu
ne
toli
gh
tin
gch
ang
es
Ab
leto
seg
men
t
adv
erse
ly
illu
min
ated
road
sign
pro
per
ly:
ver
y
fast
Hu
eis
no
tsu
ited
for
gre
y-l
evel
axis
[43
]P
acli
ket
al.
20
00
*9
5%
of
hit
rate
Neural Comput & Applic (2010) 19:601–615 603
123
using k-means. Some literatures related to ESOM may be
found in [21, 22, 23], and [28].
3 Emergent self-organizing map
Self-organizing map learns in an unsupervised fashion
without feedback from a teacher. It is extremely useful in
visualizing data of high dimensionality using low dimen-
sions. The neurons go through competitive learning. An
output neuron that wins the competition is called the
winning neuron. The goal of SOM is to transform an
incoming signal pattern of arbitrary dimension into a one-
or two-dimensional discrete map, and to perform this
transformation adaptively in a topologically ordered
fashion.
Kohonen [1] describes SOM as a non-linear, ordered,
smooth mapping of high-dimensional input data manifolds
onto the elements of a regular, low-dimensional array.
Assume the set of input variables nj
� �is definable as a real
vector x ¼ n1; n2; . . .; nn½ �T2 <n. With each element in the
SOM array, we associate a parametric real vector mi ¼li1; li2; . . .; lin½ �T2 <n that we call a model. Assuming a
general distance measure between x and mi denoted by d(x,
mi), the image of an input vector x on the SOM array is
defined as the array element mc that matches best with x,
i.e., that has the index
c ¼ arg mini
d x;mið Þf g: ð1Þ
The task is to define mi in such a manner that the
mapping is ordered and descriptive of the distribution of x.
The data points that are projected to close-by locations on
the map are close-by also in the input space. The ability of
self-organizing according to neuron’s neighbourhood
Euclidean distance is the key feature of SOM. However,
the power of self-organizing that allows the emergence of
structure in data is often neglected [13]. The concept of
boundless maps (e.g. Toroids map) to avoid border effect is
rarely used. These motivate the research of developing the
ESOM [13].
The ESOM is a non-linear projection technique using
neurons arranged on a map. There are mainly two types of
ESOM grid structures in use: hexgrid (honeycomb like)
and quadgrid (trellis like) maps. Figure 1 shows the
abovementioned grid and topology.
Emergent self-organizing map forms a low-dimensional
grid of high-dimensional prototype vectors. The density of
data in the vicinity of the models associated with the map
neurons, and the distances between the models, is taken
into account for better visualization. An ESOM map con-
sists of a U-Map (from U-Matrix), a P-Map (from P-
Matrix) and a U*-Map (which combines the U and P map).
The three maps show the floor space layout for aTa
ble
1co
nti
nu
ed
Met
ho
ds
Cat
.T
heo
ryA
dv
anta
ge(
s)P
oss
ible
issu
e(s)
Com
pu
tati
on
al
cost
Ref
.D
evel
op
erY
ear
Per
form
ance
Co
lour
index
ing
CC
om
par
iso
ns
of
the
colo
ure
do
bje
cts
of
two
imag
esar
ed
on
eb
yco
mp
arin
gth
eir
colo
ur
his
togra
ms
reg
ardle
sso
fth
eo
bje
cts
ori
enta
tion
or
par
tial
occ
lusi
ons
Str
aig
htf
orw
ard
fast
effi
cien
t
Th
eco
mp
uta
tio
nti
me
wil
lin
crea
seg
reat
ly
inco
mp
lex
traf
fic
scen
es
[40
]F
lin
tet
al.
19
95
HS
FM
SL
oca
lo
rien
tati
on
so
fim
age
edg
esan
d
hie
rarc
hic
alte
mp
late
sar
eu
sed
for
shap
e
det
ecti
on.
Mak
euse
of
Sobel
oper
ator
Ito
nly
dea
lsw
ith
road
sign
sw
ith
edg
es
do
esn
ot
cou
nte
rfo
r
circ
lesi
gn
[16
]P
avel
etal
.1
99
9P
rom
isin
gfo
rre
al
tim
e
imp
lem
enta
tio
n
Dis
tance
tran
sform
mat
chin
g
SIt
use
sa
tem
pla
teh
iera
rch
yto
cap
ture
the
var
iety
of
ob
ject
shap
es
All
ow
sd
issi
mil
arit
y
bet
wee
no
bje
ctan
d
tem
pla
teto
ace
rtai
n
exte
nt
Its
lim
itat
ion
isev
en
wit
ha
mu
lti-
stag
e
edg
eth
resh
old
ing
tech
niq
ue
mat
chin
g
rem
ain
sd
epen
den
t
on
are
aso
nab
le
con
tou
r
seg
men
tati
on
[36
]G
avri
laet
al.
19
99
Sin
gle
imag
e
det
ecti
on
rate
s
[9
5%
Cco
lou
r-b
ased
reco
gn
itio
n,
Ssh
ape-
bas
edre
cognit
ion,
Oo
ther
reco
gn
itio
n
604 Neural Comput & Applic (2010) 19:601–615
123

landscape-like visualization for distance and density
structure of the high-dimensional data space. Structures
emerge on top of the map by the cooperation of many
neurons. These emerging structures are the main concept of
ESOM. It can be used to achieve visualization, clustering,
and classification. The different maps for visualization and
the clustering algorithm are introduced in the following
sub-sections.
3.1 Map visualization
Let m:D ? M be a mapping from a high-dimensional data
space D � <n onto a finite set of positions M ¼n1; . . .; nkf g � <2 arranged on a grid. Each position has its
two-dimensional coordinates and a weight vector
W ¼ w1; . . .;wkf g, which is the image of a Voronoi region
in D: the data set E = {x1,…,xd} with xi [ D is mapped to
a position in M such that a data point xi is mapped to its
best-match bm(xi) = nb [ M with d x;wbð Þ� d x;wj
� �;
8wj 2 W , where d is the distance on the data set. The set of
immediate neighbours of a position ni on the grid is
denoted by N(i).
3.1.1 U-map (distance-based visualization)
The U-height for each neuron ni is the average distance of
ni’s weight vectors to the weight vectors of its immediate
neighbours N(i). The U-height, denoted uh(i), is calculated
as follows:
uhðiÞ ¼ 1
n
X
j
d wi;wj
� �; j 2 NðiÞ; n ¼ jNðiÞj: ð2Þ
A display of all U-heights on top of the map is called a
U-Matrix [21]. The height value will be large in area where
no or few data points reside, creating mountain ranges for
cluster boundaries.
3.1.2 P-map (density-based visualization)
The P-height ph(i) for a neuron ni is a measure of the
density of data points in the vicinity of wi:
phðiÞ ¼ j x 2 Ejd x;wj
� �\r
� �; r [ 0; r 2 <j: ð3Þ
A display of all P-heights on top of the grid G is called a
P-matrix [22]. Whereas distance-based methods usually
work well for clearly separated clusters, problems can
occur with slowly changing densities and overlapping
clusters.
3.1.3 U*-map (distance and density based visualization)
The U*-matrix combines the distance-based U-matrix and
the density-based P-matrix. The U*-matrix shows signifi-
cant improvement over U-matrix in dataset with clusters
that are not clearly separated in the high-dimensional
space.
Let uh(i) be denoted by the U-height of a neuron i, ph
denote the mean of all P-heights and maxi
phðiÞf g be the
maximum of all P-heights. The U*-height, denoted as
u*h(i), of an U-Matrix for neuron i is calculated as:
u�h ið Þ ¼ uh ið Þ � k ið Þ; ð4Þ
where k(i) is denoted as a scaling factor which is calculated
as:
k ið Þ ¼ ph ið Þ � ph
ph�maxi
ph ið Þf gþ 1: ð5Þ
With this equation, the scaling factor basically is a linear
function of the P-heights. Using this scaling factor, the U*-
height is equalled to U-height if ph ið Þ ¼ ph of neuron i. We
expect that the probability density function of P-height is
bimodal and its density distribution is a combination of the
within-cluster density distribution and the densities of
weight vectors in between clusters.
3.2 ESOM clustering algorithm
The clustering of ESOM is based on the U*C clustering
algorithm described by [29]. Consider a data point x at
the surface of a cluster C, with a best match of
ni = bm(x). The weight vectors of its neighbours N(i) are
either within the cluster, in a different cluster or inter-
polate between clusters. Assume that the inter-cluster
distances are locally larger than the local within-cluster
distances, then the U-heights in N(i) will be large in such
directions which point away from the cluster C. Thus, a
so-called immersive movement will perform to lead away
from cluster borders.
This immersive movement is performed which starts
from a grid position, keeps decreasing the U-matrix value
Fig. 1 Structures of quad and
hex grid, and topologies of
bounded and boundless
(adapted from [13])
Neural Comput & Applic (2010) 19:601–615 605
123

by moving to the neighbour with the smallest value, then
keeps increasing the P-matrix value by moving to the
neighbour with the largest value. The details of this clus-
tering algorithm can be referred to Ultsch [29], and the
algorithm is summarized as follows.
Algorithm 1: ESOM Clustering
Given U-Matrix, P-Matrix, U*-Matrix, I = {}.
Immersion
For all positions n of the grid
1. From position n follow a descending movement on the U-Matrix
until the lowest distance value is reached in position u
2. From position u follow an ascending movement on the P-Matrix
until the highest density value is reached in position p
I ¼ I [ pf g; Immersion nð Þ ¼ p
Cluster assignment
1. Calculate the watersheds for the U*-Matrix using the algorithm in
[24]
2. Partition I using these watersheds into clusters C1…Cc
3. Assign a data point x to a cluster Cj if Immersion bm xð Þð Þ 2 Cj
4 Visualization and classification results in road sign
images
This section evaluates the visualization and classification
performance of the ESOM model in the proposed road
sign image recognition task. The creation of database and
the methodology of the road sign image detection are also
described in this section. The overall framework is illus-
trated in Fig. 2. In this framework, regions with potential
road signs are detected by a neural network-based road
sign detection module. Then, the regions of the image
containing potential road sign patterns are extracted, and
the extracted features are used as input to the ESOM. The
detection module segments the input image and extracts
out the areas that contain road sign patterns. We adopted
the holistic approach that searches the whole image for
possible road signs to ensure no road sign is missed out.
The map of the extracted observations is then created and
further analysed to identify the type of road signs they
represented. We have collected 447 different road scene
images in which six categories of road signs with totally
480 images were selected for the experiment in this work.
They are stop, give-way, no left turn, no right turn, speed
limit 60 and speed limit 90 signs as shown in Fig. 3.
These categories were chosen based on an observation
made by the authors and due to higher chances of
occurrence on the road. We first introduce the dataset we
collected; next we go into different parts of the system to
explain the details.
4.1 Road sign database
To the best of our knowledge, little efforts were observed
trying to a publicize road sign database. It has yet to be
known any common road sign database that enables the
benchmarking of road sign recognition systems. The dat-
abases used by researchers in this field are generally small
and lack standardization. This is evident from the work of
Soetedjo and Yamada [30] with 180 images, Escalera [31]
who used 50 images, and Gao [33] who used only 41
images. The problem with working with such small data-
sets is that it is difficult to evaluate the reliability of the
results. There are some with large databases like Vitabile
[34] with 620 images, Paclik [35] with 1,200 images and
Gavrila [36] with 1,000 images. The main concern is that
those databases are not publicly available. Collecting the
road signs images is very time consuming due to the fact
that there are so many different types of road signs avail-
able. And each type of road signs must be sufficiently
collected in order for the experiments to be fruitful. Road
signs vary from country to country; the categories of road
sign also differ. All these make the construction of a
standardized road sign database a real challenge.
We thereby made our road sign database publicly
available together with this work. There are a total of 447
road scene images that contain road signs and about 1,600
cropped road signs. We started with observing the road
signs along the expressway and summarized the number of
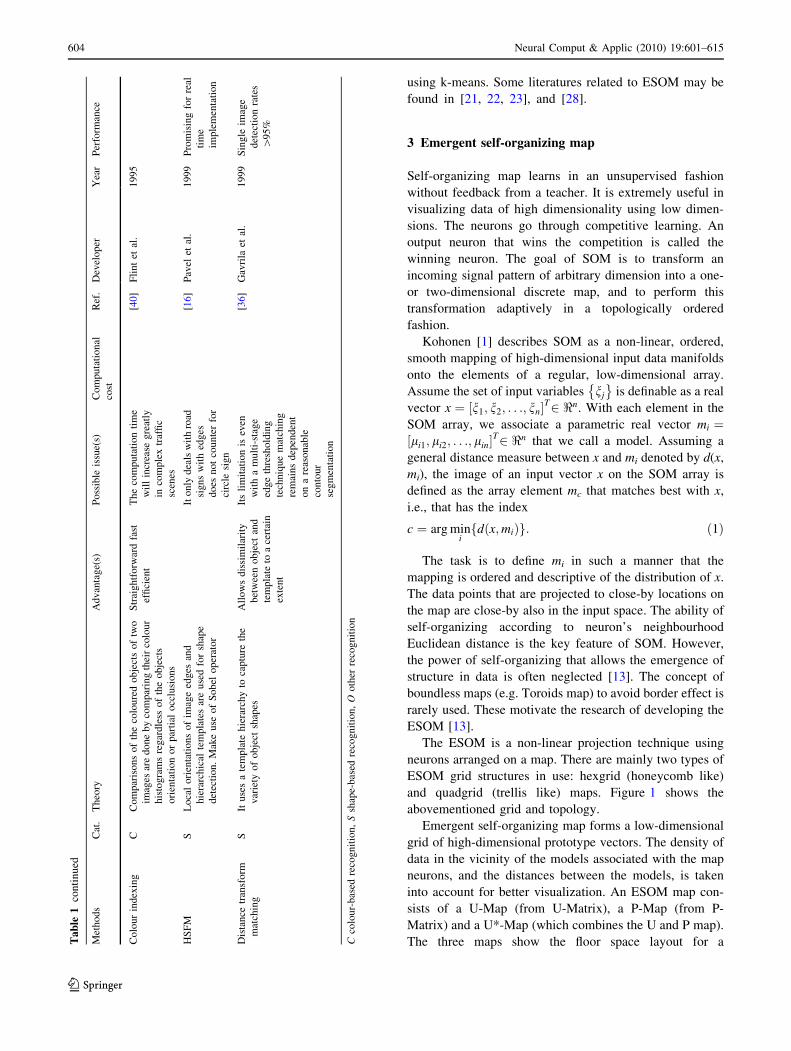
speed limit signs occurrence into Table 2 and Fig. 4, which
comprises of 80 observations. Based on the number of
occurrence of the speed limit signs, the top two frequently
seen speed limit signs are chosen. From the survey, some
speed limit signs are hardly captured like speed limit 10,
20, 30, 40, 80, and 100 km/h. Based on the survey, speed
limit 60 km/h and speed limit 90 km/h are more frequently
seen when compared to others, and hence they are chosen
for implementation in this work together with stop, give-
way, no left turn, and no right turn signs. However, the
database itself contains road signs like give-way sign, no
entry, no left turn, no right turn, speed limit 10 km/h till
speed limit 100 km/h, regulatory and warning signs. On top
of that, some commonly confused objects on the road are
included in the databases which are useful for training
neural network-based road sign recognition system to
reject non-road-sign images. The road scene images com-
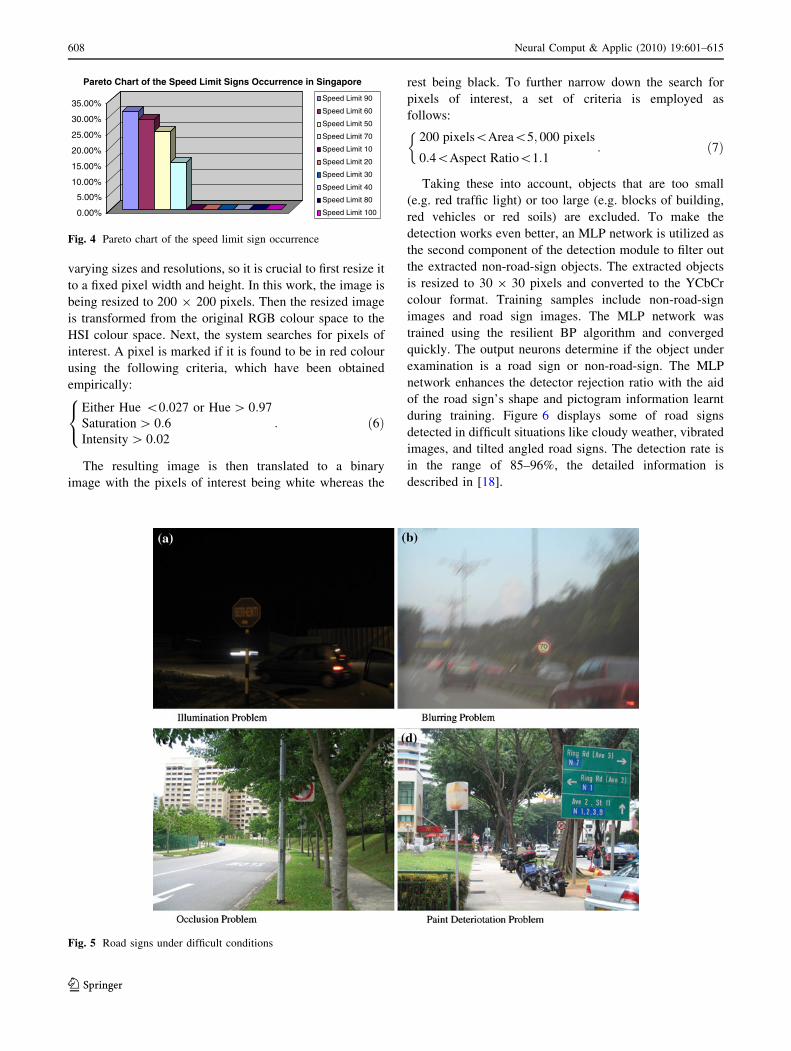
prises difficult road scene situations like road sign changes
in position, scale, rotation, illumination problem caused by
different weather condition (Fig. 5a), image blurring
(Fig. 5b), partial occlusion (Fig. 5c), degradation of the
sign colours (Fig. 5d), and the similar objects as road signs.
We have chosen some standardized road signs like stop
signs, no left turn, no right turn, give-way, no entry, and
606 Neural Comput & Applic (2010) 19:601–615
123

speed limit signs. The cropped road signs are standardized
road signs that are regulated by many countries like United
Kingdom, United States, and European countries.
4.2 Road sign acquisition and extraction
The main task of the road sign acquisition and extraction is
to segment the input image and extract out the areas that
contain road sign patterns. It consists of two components:
segmentation and filtering. In our work, we adopted the
hue-saturation-intensity (HSI) transformation as it is
appealing in colour segmentation because it gives unique
information for different colour component. The HSI seg-
mentation performs the segmentation according to the
nature of the raw images. The raw image could be in
Fig. 2 The overall framework for road sign image processing
Fig. 3 Six selected road signs
for classification. a stop sign, bgive-way sign, c no left turn
sign, d no right turn, e speed
limit 60 km/h sign, and f speed
limit 90 km/h sign
Table 2 Speed limit signs occurrence in Singapore
Speed limit sign (km/h) No. of occurrence Percentage
Speed limit 10 0 0.00
Speed limit 20 0 0.00
Speed limit 30 0 0.00
Speed limit 40 0 0.00
Speed limit 50 20 25.00
Speed limit 60 23 28.75
Speed limit 70 12 15.00
Speed limit 80 0 0.00
Speed limit 90 25 31.25
Speed limit 100 0 0.00
Total 80 100.00
Neural Comput & Applic (2010) 19:601–615 607
123
varying sizes and resolutions, so it is crucial to first resize it
to a fixed pixel width and height. In this work, the image is
being resized to 200 9 200 pixels. Then the resized image
is transformed from the original RGB colour space to the
HSI colour space. Next, the system searches for pixels of
interest. A pixel is marked if it is found to be in red colour
using the following criteria, which have been obtained
empirically:
Either Hue \0:027 or Hue [ 0:97
Saturation [ 0:6Intensity [ 0:02
8<
:: ð6Þ
The resulting image is then translated to a binary
image with the pixels of interest being white whereas the
rest being black. To further narrow down the search for
pixels of interest, a set of criteria is employed as
follows:
200 pixels\Area\5; 000 pixels
0:4\Aspect Ratio\1:1
�: ð7Þ
Taking these into account, objects that are too small
(e.g. red traffic light) or too large (e.g. blocks of building,
red vehicles or red soils) are excluded. To make the
detection works even better, an MLP network is utilized as
the second component of the detection module to filter out
the extracted non-road-sign objects. The extracted objects
is resized to 30 9 30 pixels and converted to the YCbCr
colour format. Training samples include non-road-sign
images and road sign images. The MLP network was
trained using the resilient BP algorithm and converged
quickly. The output neurons determine if the object under
examination is a road sign or non-road-sign. The MLP
network enhances the detector rejection ratio with the aid
of the road sign’s shape and pictogram information learnt
during training. Figure 6 displays some of road signs
detected in difficult situations like cloudy weather, vibrated
images, and tilted angled road signs. The detection rate is
in the range of 85–96%, the detailed information is
described in [18].
0.00%
5.00%
10.00%
15.00%
20.00%
25.00%
30.00%
35.00%
Pareto Chart of the Speed Limit Signs Occurrence in Singapore
Speed Limit 90
Speed Limit 60
Speed Limit 50
Speed Limit 70
Speed Limit 10
Speed Limit 20
Speed Limit 30
Speed Limit 40
Speed Limit 80
Speed Limit 100
Fig. 4 Pareto chart of the speed limit sign occurrence
Fig. 5 Road signs under difficult conditions
608 Neural Comput & Applic (2010) 19:601–615
123

4.3 Road sign feature extraction and representation
Meaningful information is hidden underneath the road sign
image. Proper selection of features optimizes the perfor-
mance of classification. Feature extraction forms the basic
building block of the recognition problem. In this study, we
used the Gabor filtering technique to extract the dominant
features of different road signs. In fact, Gabor wavelet is a
popular choice because of its capability to approximate
mammals’ visual cortex. The primary cortex of human
brain interprets visual signals. It consists of neurons, which
respond differently to different stimuli attributes. The
receptive field of cortical cell consists of a central ON
region surrounded by 2 OFF regions, each region elongated
along a preferred orientation [25]. According to Jones and
Palmer, these receptive fields can be reproduced fairly well
using Daugman’s Gabor function [26]. There is consider-
able evidence that the parameterized family of 2-D Gabor
filters, proposed by Daugman in 1980, suitably models the
profile of receptive cells in the primary visual cortex.
Gabor filters model the properties of spatial localization,
orientation selectivity, and spatial frequency selectivity and
phase relationship of the receptive cells. The Gabor
wavelet function can be represented by:
gðx; yÞ ¼ g1ðx; yÞ expðj2pWxÞ ð8Þ
where
g1ðx; yÞ ¼1
2prxry
� �exp �1
2
x2
r2x
þ y2
r2y
! !
: ð9Þ
We consider that the receptive field (RF) of each cortical
cell consists of a central ON region (a region excited by
light) surrounded by two lateral OFF regions (excited by
darkness) [27]. Spatial frequency (W) determines the width
of the ON and OFF regions. rx2 and ry
2 are spatial variances
which establish the dimension of the RF in the preferred
and non-preferred orientations.
An image is convolved with all these filters so as to
extract the image features. The lower bound frequency is
chosen as 0.05, while the upper bound frequency is chosen
to be 0.4. Orientations are in multiples of p6
from 0 to p.
After the Gabor feature extraction process, a number of
Gabor filtered images are generated. This appears to be a
huge dataset to be realized, and the images may include
redundant information. Therefore, feature selection is
essential. In the feature selection step, the Gabor images
generated for a road sign are transformed into a single
image that theoretically has the same dimension as the
Fig. 6 Images used in
evaluating detection module
Neural Comput & Applic (2010) 19:601–615 609
123

original image, but the dataset undergoes dimensionality
reduction. In this work, principle component analysis
(PCA) is used to shrink down the dimensions. PCA is a
useful technique that has been widely used in vast appli-
cations for reducing dimensionality, visualization, and
finding patterns or clusters in high-dimensional data. The
similarities and differences of data can be shown through
the use of PCA. Figure 7 shows the responses of the dif-
ferent road sign images by processing with Gabor filtering
and further processing with PCA. The filter bank consists
of 24 different filters with 6 different orientations (from 0
to p) and 4 different scales. Image features were repre-
sented using the full convolution results of the image with
different Gabor kernels. Each road sign image was filtered
with one filter, thus the filtered output would be of size
30 9 30 (i.e. a 900-dimensional vector). So, 24 sets of
filtered vectors were concatenated horizontally to form an
input matrix of size 900 9 24 for PCA operation. We then
extracted the first PCA component corresponding to the
highest eigenvalue to produce a 900 9 1 input vector to be
learnt and classified by SOM at the later stage.
4.4 Road sign features visualization
This section presents the visualization results for
representing road sign feature in ESOM feature map. The
whole data set (i.e. 447 road sign images) was trained with
map size 20 9 20. For the purpose of validation, a number
of Gabor filters were generated in the range from one
Gabor up to 24 Gabors, and the resulting road sign features
would be used for visualization and classification by the
SOM feature map. The visualization results by both SOM
and ESOM feature mapping are shown in Figs. 8 and 9
respectively. All the maps shown in Fig. 8 are the general
U-matrix obtained by the SOM visualization, whereas all
the maps shown in Fig. 9 are both U-matrix and P-matrix
obtained by the ESOM visualization. The six road signs are
labelled as different colours. The little circle shown inside
each neuron represented the test output that maps to the
corresponding neuron in the SOM maps. The colour of the
little circle denotes the class of the test point. We have
adopted 2-D toroid structure with Euclidean distance for
ESOM. The ESOM output is then shown to have connected
boundary effect, as shown in both U-matrix and P-matrix,
for example the give-way sign in yellow from Fig. 9 and
the no right turn in pink that is distributed around the edges
of the map. The ESOM provides a low-dimensional pro-
jection preserving the topology of the input space, thus the
high-dimensional distances can be visualized with the
canonical U-Matrix, P-Matrix and U*-Matrix together so
that the cluster boundaries can be distinguished more
sharply. In addition, the visualization by the ESOM feature
map can be interpreted as height values on top of the
usually two-dimensional grid of the SOM, leading to an
intuitive paradigm of a landscape. Based on looking at the
results, it seems that using the ESOM feature map with 4
Gabor filtering has the best visualization quality of map-
ping effects among the maps with other number of Gabor
filters. Most of the road signs included give way, no left
turn, no right turn, speed limit 60 and speed limit 90 which
are able to form closed regions on the map, whereas there
is one road sign, i.e., stop that formed more than one region
in the map. In particular, the stop sign is often mapped in
different and separate regions. It is because the stop sign
may contain outliers within both areas of the give-way sign
and speed limit 90. It is similar to the mapping of the No
right turn with one Gabor filter used, which contains some
outliers within both areas of the speed limit 60 and speed
limit 90 signs. The mapping of the no left turn sign with 24
Gabors used is even worse as it became outliers and noises
by the other road signs so it populated to different regions.
This probably ‘‘confused’’ by the combination of Gabor
and PCA feature extraction in which the extracted features
of no left turn are quite similar to the other road signs, like
no right turn or speed limit sign, creates a rather random
mapping. In summary, most of the road signs can be
mapped by the ESOM, and the visualization results
obtained by the ESOM can help in recognizing and clas-
sifying consistent road signs in unlabelled datasets.Fig. 7 Intermediate images of 6 classes of road signs. a Stop, b give-
way, c no left turn, d no right turn, e speed limit 60, and f speed limit 90
610 Neural Comput & Applic (2010) 19:601–615
123

4.5 Road sign classification
For classification of task, labelling all (or most) neurons
instead of only the best matches created a classification
method based on unsupervised training which is similar to
a k-nearest neighbour (kNN) classifier with k = 1 that can
be applied to new data automatically. The main difference
to kNN is that the user can use the visualization of the
ESOM to create the labelling, whereas kNN does not give
any visualization that could be used for this purpose. Fur-
ther, kNN classification always classifies a point, no matter
how near (or far) the neighbours are. In contrast, ESOM
classification offers an unknown class by leaving neurons
unlabelled, for example, for sparsely populated regions
separating clusters.
This section presents to use ESOM classification to
classify the road sign images. Ten-folds cross validation
has been conducted. Each fold contains eight images for
each class. We first compare the results obtained from
SOM and ESOM classifiers. Tables 3 and 4 summarize the
classification results of ten-folds cross validation obtained
from the SOM and ESOM, respectively. There are four sets
of results involved in the feature map. The first set uses
four Gabor wavelets and takes PCA of the convoluted
images, and it produces average hit rate of 90.0% for
ESOM which is much higher than 71% achieved from
traditional SOM. The second set extracts from PCA image
of eight wavelets, and its hit rate is about 84.0% for ESOM
and 77% for SOM. The third set uses twelve Gabor
wavelets; the hit rate is about 83.7% for ESOM, almost
Fig. 8 The Self-Organizing
Feature Maps for Road Sign
Images. a 1 Gabor used, b 4
Gabors used, c 8 Gabors used, d12 Gabors used, e 24 Gabors
used, f the color legend
Neural Comput & Applic (2010) 19:601–615 611
123

10% higher than SOM. The last set takes 24 Gabor
wavelets and gives the hit rate as 81.7%. It is observed that
the best hit-rate of 90% could be obtained by using 4 Gabor
wavelets for feature extraction. Looking into individual
road signs, the five classes of road signs are quite compa-
rable excluding Stop sign in which about 65% hit-rate was
Fig. 9 The Emergent Self-Organizing Feature Maps (U-matrix and
P-matrix) for Road Sign Images. a 1 Gabor used in U-matrix, b 1
Gabor used in P-matrix, c 4 Gabors used in U-matrix, d 4 Gabors used
in U-matrix, e 8 Gabors used in U-matrix, f 8 Gabors used in P-
matrix, (g) 12 Gabors used in U-matrix, (h) 12 Gabors used in P-
matrix (i) 24 Gabors used in U-matrix, (j) 24 Gabors used in P-matrix
(k) the colour legend
612 Neural Comput & Applic (2010) 19:601–615
123
obtained. Referring to the visualization results in Fig. 6, we
see that the clusters of Stop sign are quite scattered around.
It is due to the fact that the image processed by Gabor of
the Stop sign is unable to provide informative clue about
the road sign.
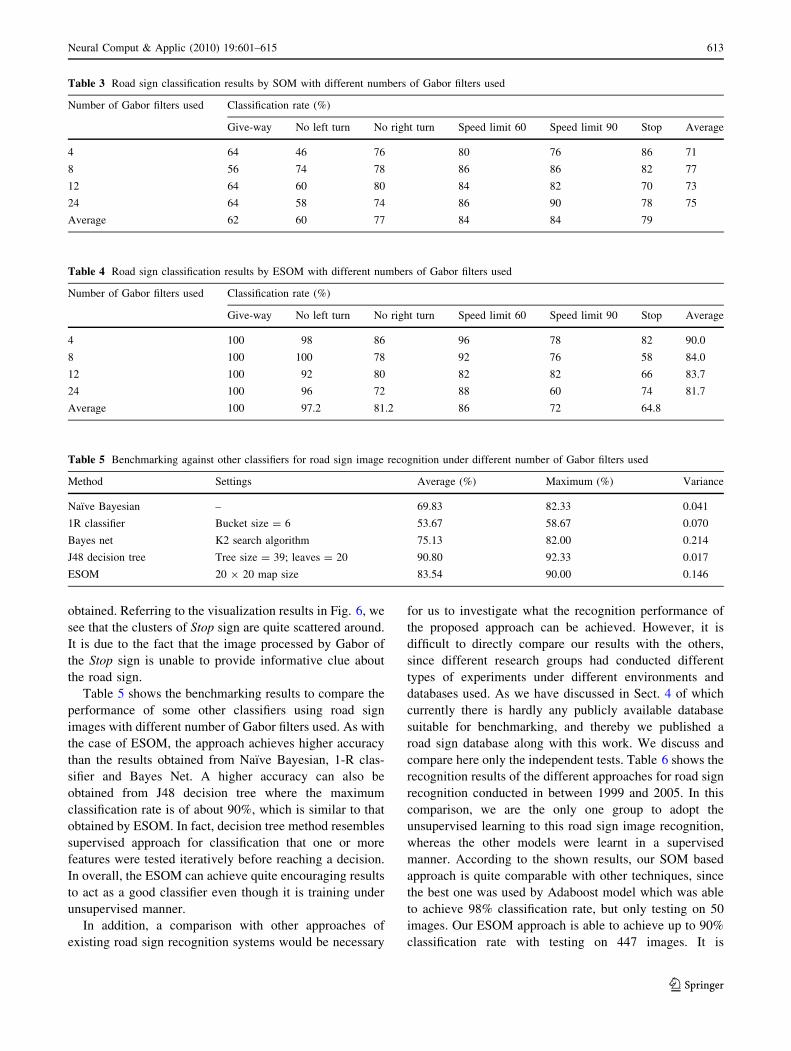
Table 5 shows the benchmarking results to compare the
performance of some other classifiers using road sign
images with different number of Gabor filters used. As with
the case of ESOM, the approach achieves higher accuracy
than the results obtained from Naıve Bayesian, 1-R clas-
sifier and Bayes Net. A higher accuracy can also be
obtained from J48 decision tree where the maximum
classification rate is of about 90%, which is similar to that
obtained by ESOM. In fact, decision tree method resembles
supervised approach for classification that one or more
features were tested iteratively before reaching a decision.
In overall, the ESOM can achieve quite encouraging results
to act as a good classifier even though it is training under
unsupervised manner.
In addition, a comparison with other approaches of
existing road sign recognition systems would be necessary
for us to investigate what the recognition performance of
the proposed approach can be achieved. However, it is
difficult to directly compare our results with the others,
since different research groups had conducted different
types of experiments under different environments and
databases used. As we have discussed in Sect. 4 of which
currently there is hardly any publicly available database
suitable for benchmarking, and thereby we published a
road sign database along with this work. We discuss and
compare here only the independent tests. Table 6 shows the
recognition results of the different approaches for road sign
recognition conducted in between 1999 and 2005. In this
comparison, we are the only one group to adopt the
unsupervised learning to this road sign image recognition,
whereas the other models were learnt in a supervised
manner. According to the shown results, our SOM based
approach is quite comparable with other techniques, since
the best one was used by Adaboost model which was able
to achieve 98% classification rate, but only testing on 50
images. Our ESOM approach is able to achieve up to 90%
classification rate with testing on 447 images. It is
Table 3 Road sign classification results by SOM with different numbers of Gabor filters used
Number of Gabor filters used Classification rate (%)
Give-way No left turn No right turn Speed limit 60 Speed limit 90 Stop Average
4 64 46 76 80 76 86 71
8 56 74 78 86 86 82 77
12 64 60 80 84 82 70 73
24 64 58 74 86 90 78 75
Average 62 60 77 84 84 79
Table 4 Road sign classification results by ESOM with different numbers of Gabor filters used
Number of Gabor filters used Classification rate (%)
Give-way No left turn No right turn Speed limit 60 Speed limit 90 Stop Average
4 100 98 86 96 78 82 90.0
8 100 100 78 92 76 58 84.0
12 100 92 80 82 82 66 83.7
24 100 96 72 88 60 74 81.7
Average 100 97.2 81.2 86 72 64.8
Table 5 Benchmarking against other classifiers for road sign image recognition under different number of Gabor filters used
Method Settings Average (%) Maximum (%) Variance
Naıve Bayesian – 69.83 82.33 0.041
1R classifier Bucket size = 6 53.67 58.67 0.070
Bayes net K2 search algorithm 75.13 82.00 0.214
J48 decision tree Tree size = 39; leaves = 20 90.80 92.33 0.017
ESOM 20 9 20 map size 83.54 90.00 0.146
Neural Comput & Applic (2010) 19:601–615 613
123

demonstrated that our result is quite encouraging and
comparable.
5 Conclusion
This paper described a novel methodology of recognizing
road sign images using ESOM. ESOM is a powerful tool
for clustering and classification. It is quite useful for
analysing the road sign images under different scenarios.
Unlike the conventional SOM and/or other classifiers that
rely on labelling all or most neurons in the topological
map to perform the classification task, the ESOM
approach does not require to be labelled in a priori which
can help detect classes not seen in training. The capability
of visualization of ESOM enables us to analyse the high-
dimensional space of image features in an intuitive way,
although a large amount of neurons may be required, and
hence the computation may be heavy. Based on the
experimental results, it is demonstrated that the road sign
recognition by ESOM gives better classification than that
by SOM.
References
1. Kohonen T (1990) Self-organizing map. Proc IEEE 78(9):1464–
1480
2. Kohonen T (2001) Self-organizing maps, 3rd edn. Springer,
Berlin
3. Chang C-H, Xu P, Xiao R, Srikanthan T (2005) New adaptive
color quantization method based on self-organizing maps. IEEE
Trans Neural Networks 16(1):237–249
4. Hu W, Xie D, Tan T (2004) A hierarchical self-organizing
approach for learning the patterns of motion trajectories. IEEE
Trans Neural Networks 15(1):135–144
5. Wu S, Rahman MKM, Chow TWS (2005) Content-based image
retrieval using growing hierarchical self-organizing quadtree
map. Pattern Recogn 38(5):707–722
6. Ritter H, Martinetz T, Schulten K (1992) Neural computation and
self-organizing maps: an introduction. Addison-Wesley, Reading
7. Mulier F, Cherkassky V (1995) Self-organization as an iterative
kernel smoothing process. Neural Comput 7:1165–1177
8. Ultsch A, Siemon HP (1990) Kohonen’s self organizing feature
maps for exploratory data analysis. In: Proceedings of the Inter-
national Joint Conf Neural Networks, Paris, France, pp 305–308
9. Pal NR, Eluri VK (1998) Two efficient connectionist schemes for
structure preserving dimensionality reduction. IEEE Trans Neural
Networks 9(6):1142–1154
10. Kong A (2000) Interactive visualization and analysis of hierar-
chical neural projections for data mining. IEEE Trans Neural
Networks 11(3):615–624
11. Wu S, Chow TWS (2005) PRSOM: a new visualization method
by hybridizing multidimensional scaling and self-organizing
map. IEEE Trans Neural Networks 16(6):1362–1380
12. Yin H (2002) ViSOM: a novel method for multivariate data
projection and structure visualization. IEEE Trans Neural Net-
works 13(1):237–243
13. Ultsch A, Morchen F (2005) ESOM-Maps: tools for clustering,
visualization, and classification with Emergent SOM’’, TechnicalReport No. 46, Department of Mathematics and Computer Sci-
ence, University of Marburg, Germany
14. de la Escalera A, Armingol JM, Mata M (2003) Traffic sign
recognition and analysis for intelligent vehicles. Image Vision
Comput 21:247–258
15. Vitabile S, Pollaccia G, Pilato G, Sorbello F (2001) Road signs
recognition using a dynamic pixel aggregation technique in the
HSV color space. In: Proceedings of the 11th international con-
ference on image analysis and processing, Palermo, Italy,
pp 572–577
16. Paclik P, Novovicova J (2000) Road sign classification without
colour information. In: Proceedings of 6th conference of
advanced school of imaging and computing, ASCI, Lommel,
Belgium
17. Shaposhnikov D, Podladchikova LN, Golovan AV, Shevtsova N,
Kunbin AH, Xiaohong G (2002) Road sign recognition by single
positioning of space-variant sensor window. In Proceedings of
15th international conference on vision interface, Canada, Cal-
gary, pp 213–217
18. Nguwi Y, Kouzani AZ (2008) Detection and classification of road
signs in natural environments. Neural Comput Appl 17(3):265–
289
19. Aoyagi Y, Asakura T (1996) A study on traffic sign recognition
in scene image using genetic algorithms and neural networks. In:
Proceedings of the 22nd international conference on industrial
electronics, control, and instrumentation, Taipeis, pp 1838–1843
20. Torresen J, Bakke J, Sekanina L (2004) Efficient recognition of
speed limit signs. In: Proceedings of the 7th international IEEE
conference on intelligent transportation systems, pp 652–656
Table 6 Comparison with other recognition approaches
Approaches Techniques used Database nature Performance
Soetedjio and Yamada (2005) [30] Ring partitioned 180 test images, circular road signs
(no entry, speed limit signs only)
93.9%
Escalera and Radeva (2004) [31] Adaboost and model matching 21 classes, 50 test images 98% on 50 test images
Torresen et al. 2004 [32] Template matching 7 classes of speed limit signs, 198 images 90.9%
Gao et al. (2002) [33] Behavioural model of vision 41 British road sign images 88–90%
Vitabile et al. (2002) [34] MLP neural networks 620 images of 24 classes circular signs -90% of hit rate
Paclik et al. (2000) [35] Laplace Kernel classifier 1,200 images of 50 classes -95% of hit rate
Gavrila and Philomin (1999) [36] Distance transform matching 1,000 traffic sign images -95%
Our approach ESOM based with Gabor features 480 images, 6 classes running under
ten-folds cross validation
78.3–90%
614 Neural Comput & Applic (2010) 19:601–615
123

21. Ultsch A, Siemon H. (1990). Kohonen’s self organizing maps for
exploratory data analysis. In: Proceedings of international neural
network conference (INNC’90), pp 305–308
22. Ultsch A (2003) Maps for the visualization of high-dimensional
data spaces. In: Proceedings of the workshop on self organizing
maps, Kyushu, Japan
23. Ultsch A (2003) Pareto density estimation: a density estimation
for knowledge Discovery. In: Baier D, Wernecke KD (eds)
Innovations in classification, data science, and information sys-
tems—proceedings 27th annual conference of the german clas-
sification society (GfKL) 2003, Springer, Berlin, Heidelberg,
pp 91–100
24. Luc V, Soille P (1991) Watersheds in digital space: an efficient
algorithm based on immersion simulations. IEEE Trans Pattern
Anal Mach Intell 13(6):583–598
25. La Cara GE, Ursino M (2004) A neural network model of con-
tours extraction based on orientation selectivity in the primary
visual cortex: applications on real images. In: Proceedings of 26th
Annual International Conference of the IEEE EMBS
26. Jones JP, Palmer LA (1987) An evaluation of the two-dimen-
sional gabor filter model of simple receptive fields in cat striate
cortex. J Neurophysiol 58(6):1233–1258
27. La Cara GE, Ursino M, Bettini M (2003) Extraction of salient
contours in primary visual cortex: a neural network model based
on physiological knowledge. Proceedings of the 25th Annual
International Conference of the IEEE 3:2242–2245
28. Ultsch A (2003) U*-Matrix: a tool to visualize clusters in high
dimensional data. Department of Computer Science University of
Marburg, research report 36
29. Ultsch A (2005) Clustering with SOM: U*C, WSOM 2005, Paris,
pp 75–82
30. Soetedjo A, Yamada K (2005) Traffic sign classification using
ring partitioned method. IEICE Trans Fundamentals E88A(9):
166–178
31. de la Escalera A, Radeva P (2004) Fast greyscale road sign model
matching and recognition. In: Vitria J (ed) Recent advances in
artificial intelligence research and development. IOS Press,
Amsterdam, pp 69–76
32. Estevez L, Kehtarnavaz N (1996) A real-time histographic
approach to road sign recognition. In: Proceedings of the IEEE
southwest symposium on image analysis and interpretation,
pp 95–100
33. Gao X, Shevtsova N, Hong K, Batty S, Podladchikova L, Golo-
van A, Shaposhnikov D, Gusakova V (2002) Vision models based
identification of traffic signs. In: Proceedings of the 1st European
conference on color in graphics, image and vision, France,
pp 47–51
34. Vitabile S, Gentile A, Sorbello F (2002) A neural network based
automatic road signs recognizer. Proc 2002 Int Joint Conf Neural
Networks 3:2315–2320
35. Paclik P, Novovicova J, Pudil P, Somol P (2000) Road sign
classification using the Laplace kernel classifier. Pattern Recogn
Lett 21(13–14):1165–1173
36. Gavrila DM, Philomin V. (1999) Real-time object detection for
smart vehicles. In: Proceedings of IEEE international conference
on computer vision, Greece, pp 87–93
37. Ruta A, Li Y, Liu X (2010) Real-time traffic sign recognition
from video by class-specific discriminative features. Pattern Re-
cogn 43(1):416–430
38. Miguel S, Prieto MS, Allen AR (2009) Using self-organising
maps in the detection and recognition of road signs. Image Vis
Comput 27(6, 4):673–683
39. Paclik P, Novovicova J, Duin R (2006) Building road-sign clas-
sifiers using a trainable similarity measure. IEEE Trans Intell
Transp Syst 7(3):309–321
40. Lalonde M, Li Y (1995) Road sign recognition, survey of the
state of the art, Technical report, Centre de Recherche Informa-
tique de Montreal CRIM/IIT
41. Johansson B (2002) Road sign recognition from a moving vehi-
cle, Master’s thesis, Centre for Image Analysis, Uppsala
University
42. Fleyeh H, Gilani S, Dougherty M (2006) Road sign detection and
recognition using Fuzzy ARTMAP: a case study swedish speed-
limit signs. In: Proceedings of Artificial Intelligence and Soft
Computing
43. Paclik P, Novovicova J, Pudil P, Somol P (2000) Road sign
classification using the Laplace kernel classifier. Pattern Recogn
Lett 21(13–14):1165–1173
44. Fang CY, Chen SW, Fuh CS (2003) Road-sign detection and
tracking. IEEE Trans Vehicular Technol 52:1329–1341
Neural Comput & Applic (2010) 19:601–615 615
123